

Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Средством восполнения информационного дефицита у учащихся в общеобразовательных учреждениях становятся курсы по выбору, которые играют важную роль в профессиональном самоопределении старшеклассников. Подобные курсы связаны с удовлетворением индивидуальных потребностей каждого учащегося, его склонностями и интересами. Именно поэтому эффективность использования курсов по выбору при обучении робототехники достаточно велика. Содержание тем курсов по выбору по конструированию и программированию роботов зависит от материальной базы.
Титульный лист по внеурочной деятельности робототехника.doc
МУНИЦИПАЛЬНОЕ БЮДЖЕТНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ГОРОДСКОГО ОКРУГА БАЛАШИХА
«СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА № 22»
Согласовано:
Зам. дир. по ВР
___________________ С. Н. Парфенова
«01» сентября 2016г.
Утверждено:
Директор МБОУ «Школа №22»
__________________ А.Ю. Егорова
«01» сентября 2016г.
Основное общее образование
Рабочая программа по внеурочной деятельности «Робототехника»,
реализующая ФГОС ООО
8 класс
2016 2017 учебный год
Рабочая программа составлена
на основе авторской программы: Копосов
Д.Г.
Первый шаг в робототехнику:
практикум для 56 классов. – М.: БИНОМ.
Лаборатория знаний, 2015. – 286 с.: ил.
Рабочую программу составила:
Коваленко И.В.., учитель высшей кв.
категории
Учебник: Копосов Д.Г. Первый шаг в
робототехнику: рабочая тетрадь для 56
классов. – М.: БИНОМ. Лаборатория
знаний, 2015. – 86 с.: ил 2016 г Пояснительная записка
В настоящее время на рынке труда одними из самых
востребованных являются инженерные кадры высокого
профессионального уровня, поэтому необходимость популяризации
профессии инженера очевидна. Быстро растущая потребность
создания роботизированных систем, используемых в экстремальных
условиях, на производстве и в быту, предполагает, что даже
пользователи должны владеть знаниями в области робототехники.
Не смотря на явную актуальность тематики, в настоящее время
наблюдается информационный дефицит у учащихся.
Средством восполнения информационного дефицита у учащихся
в общеобразовательных учреждениях становятся курсы по выбору,
которые играют важную роль в профессиональном самоопределении
старшеклассников. Подобные курсы связаны с удовлетворением
индивидуальных потребностей каждого учащегося,
его
склонностями и интересами. Именно поэтому эффективность
использования курсов по выбору при обучении робототехники
достаточно велика.
Содержание тем курсов по выбору по конструированию и
программированию роботов зависит от материальной базы. Одной из
таких материальных баз может стать комплект конструктора Lego
Mindstorms NXT 2.0, в состав которого входят такие основные
элементы, как блок NXT, сервомоторы и датчики (два датчика
касания, ультразвуковой датчик и датчик цвета/света). Для
расширения комплекта можно использовать ресурсный набор,
состоящий из дублирующих и дополнительных деталей.
Программное обеспечение для комплектов Lego Mindstorms
NXT 2.0 представлено широким спектром сред программирования.
В состав самого комплекта уже входит оригинальная графическая
среда программирования NXTG, позволяющая вовлечь в
конструирование и программирование роботов даже учащихся
начальных классов.
Содержание курса 1. Вводное занятие. Введение в предмет «Робототехника». Что такое робот? Какие
бывают роботы.
Зарубежные и
отечественные разработки. Презентация программы. Техника безопасности на
занятиях. Правила внутреннего распорядка и поведение в коллективе. Знакомство с
конструктором. Правила работы с конструктором.
Современные тенденции робототехники.
2. Конструирование.
2.1. Способы крепления деталей. Высокая башня.
Различия принципов конструирования RIS и NXT. Способы крепления деталей.
Жесткая конструкция. Конструирование самой высокой и устойчивой башни.
Высота, устойчивость.
Практическая работа: конструируем модель «Башня».
2.2. Механический манипулятор (хваталка).
Подвижная конструкция. Понятие механизма.
Практическая работа: конструируем модель «Механический манипулятор».
3. Первые модели.
3.1. Тележки. История колеса. Одномоторная тележка.
Практическая работа: конструируем модель «Одномоторная тележка».
3.2. Тележка с автономным управлением.
Микроконтроллер. Автономное управление.
Практическая работа: конструируем модель «Тележка с автономным
управлением».
3.3. Двухмоторная тележка. Полный привод.
Центр тяжести. Трехколесная тележка.
Практическая работа: конструируем модель «Двухмоторная тележка».
Практическая работа: конструируем модель «Двухмоторный вездеход».
4. Подключения NXT.
Подключение электромоторов, датчиков, обмен данными между NXT и компьютером
с использованием USBкабеля и Bluetooth. Технические характеристики NXT.
Память, быстродействие. Порты. Кнопки. Элементы питания. Программные среды.
5. Интерфейс NXT.
Составление программ с использованием блока NXT. Возможности управления
моторами. Датчики. Использование датчиков для управления роботом. Основные
структуры программирования. Команды управления моторами в NXT Program.
Практическая работа: «Программируем без компьютера». 6. Интерфейс программной среды LEGO Mindstorms Edu NXT.
Язык программирования NXTG. Окно программы. Палитра команд. Рабочее поле
программы. Robo Center. Командный центр. Настройка параметров команд. Мотор
вперед. Мотор назад. Поворот.
Практическая работа: «Плавный поворот», «Поворот на месте».
7. Программирование.
7.1. Циклы.
Цикл с параметром. Цикл с постусловием. Переменные. Три типа переменных.
Практическая работа: Программа «Вокруг квадрата».
7.2. Ветвление.
Ветвление. Переключатели. Режимы отражения блока «Ветвление». Параллельные
ветвление.
Практическая работа: Сконструировать TriBot, написать программу, используя
«Ветвление».
7.3. Алгоритмы управления (релейный регулятор, пропорциональный регулятор,
пропорционально дифференциальный регулятор).
Практическая работа: Программа с использованием Прегулятора «Робот
описывает восьмерку», «Змейка».
7.4. Управление роботом через Bluetooth (использование 2го блока NXT) джойстик
для робота.
Практическая работа: Программа «Пульт управления роботом».
7.5. Мой блок. Конструируем собственные блоки.
Практическая работа: Программа «Мой блок».
8. Задачи для робота
8.1. Поворот, парковка в гараж, остановка (датчик касания).
Параллельные процессы. Использование датчика касания. Управление моторами.
Практическая работа: Программа «Парковка в гараж».
8.2. Движения по звуковому сигналу, определение уровня шума (датчик звука).
Использование датчика звука. Управление моторами. Измерение уровня шума.
Практическая работа: Программа «Активация робота звуком».
8.3. Движение вдоль линии. Один датчик света/цвета.
Использование датчика света или цвета. Измерение уровня освещенности.
Определение цвета с помощью датчика.
Практическая работа: Программа «Движение вдоль линии».
Практическая работа: Программа «Обнаружение черной линии».
8.4. Движение за рукой используя датчик ультразвука.
Использование датчика ультразвука. Измерение расстояния.
Практическая работа: Программа «Роботприлипала». 9. Индивидуальные работы над проектами.
Подготовка к итоговой проектной работе. Итоговая проектная работа. Контрольная
работа.
10. Соревнования.
Подготовка к соревнованиям. Классические соревнования. Соревнования по
правилам WRO. Проведение соревнований. Контрольная работа.
11. Подведение итогов года.
Выставка. Презентация проекта. Подведение итогов работы за год.
Требования к знаниям, умениям и способам действия
По окончании программы учащийся должен:
знать основы механики, автоматики и программирования в среде
MINDSTORMS NXT на языках NXTG и Robolab, RobotC;
уметь собирать модели, используя готовую схему сборки, а также по эскизу;
уметь создавать собственные проекты и при необходимости программировать
роботизированные модели.
Предъявляемый результат в конце учебного года:
осуществление сборки не менее 5 моделей роботов;
создание не менее двух индивидуальных конструкторских проектов;
создание коллективного выставочного проекта;
участие в соревнованиях и мероприятиях различного уровня.
Формы и режимы занятий
При проведении занятий используются следующие формы работы:
лекционная (получение учащимися нового материала);
самостоятельная (ученики выполняют индивидуальные задания в течение части
занятия или одногодвух занятий);
проектная деятельность (получение новых знаний, реализация личных
проектов);
соревнования (практическое участие детей в разнообразных мероприятиях по
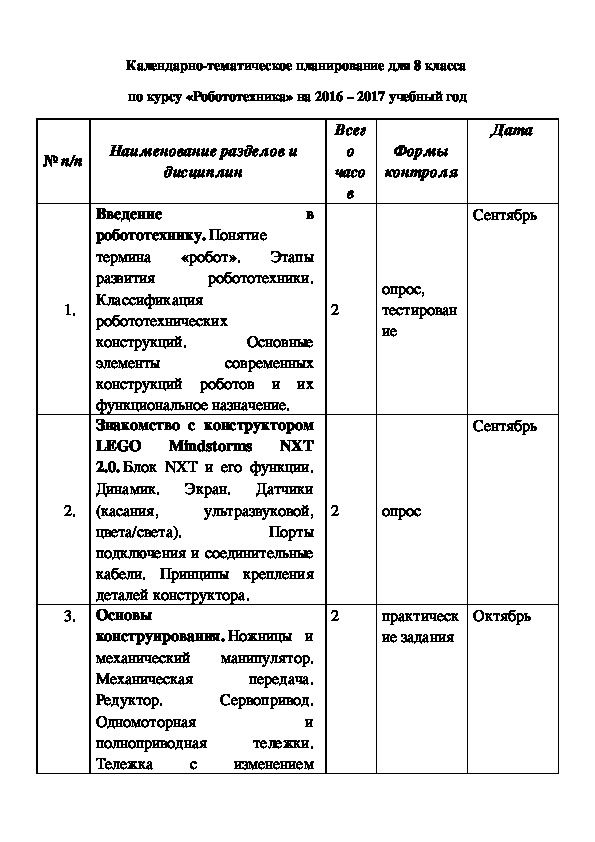
техническому легоконструированию). Календарнотематическое планирование для 8 класса
по курсу «Робототехника» на 2016 – 2017 учебный год
Всег
о
часо
в
Формы
контроля
Дата
Сентябрь
2
2
2
опрос,
тестирован
ие
опрос
Сентябрь
практическ
ие задания
Октябрь
№ п/п
Наименование разделов и
дисциплин
в
Этапы
робототехники.
Введение
робототехнику. Понятие
термина «робот».
развития
Классификация
робототехнических
Основные
конструкций.
современных
элементы
конструкций роботов и их
функциональное назначение.
Знакомство с конструктором
LEGO Mindstorms NXT
2.0. Блок NXT и его функции.
Датчики
Экран.
Динамик.
(касания,
ультразвуковой,
цвета/света).
Порты
подключения и соединительные
кабели. Принципы крепления
деталей конструктора.
1.
2.
3. Основы
конструирования. Ножницы и
механический манипулятор.
Механическая
передача.
Сервопривод.
Редуктор.
Одномоторная
и
полноприводная
тележки.
изменением
Тележка
с Октябрь
Ноябрь
Ноябрь
Декабрь
опрос,
тестирован
ие
практическ
ие задания
практическ
ие задания
Январь
Февраль
3
6
8
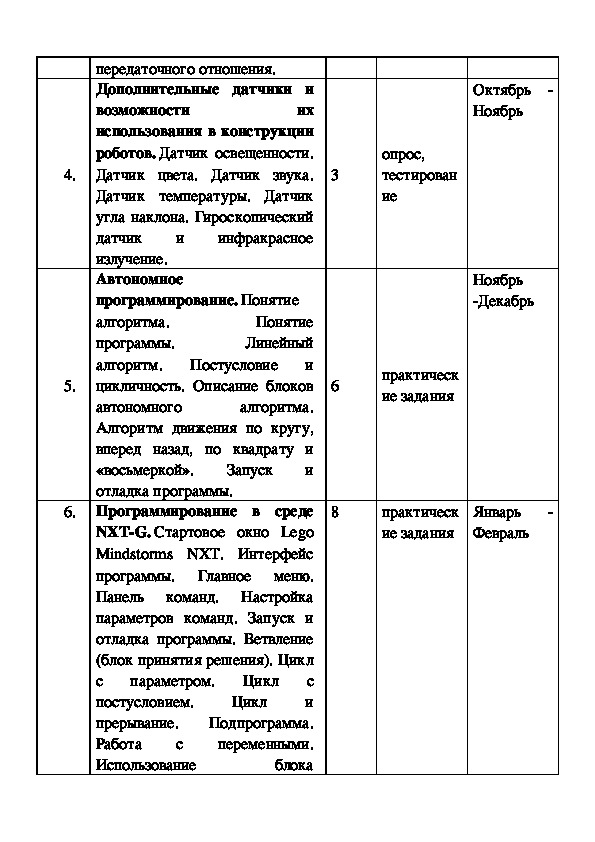
4.
5.
передаточного отношения.
Дополнительные датчики и
возможности
их
использования в конструкции
роботов. Датчик освещенности.
Датчик цвета. Датчик звука.
Датчик температуры. Датчик
угла наклона. Гироскопический
датчик и инфракрасное
излучение.
Автономное
программирование. Понятие
Понятие
алгоритма.
Линейный
программы.
Постусловие и
алгоритм.
цикличность. Описание блоков
автономного
алгоритма.
Алгоритм движения по кругу,
вперед назад, по квадрату и
«восьмеркой».
Запуск и
отладка программы.
6. Программирование в среде
NXTG. Стартовое окно Lego
Mindstorms NXT.
Интерфейс
Главное меню.
программы.
Панель команд.
Настройка
параметров команд. Запуск и
отладка программы. Ветвление
(блок принятия решения). Цикл
с параметром.
Цикл с
постусловием.
и
Подпрограмма.
прерывание.
переменными.
Работа
с
Использование
блока
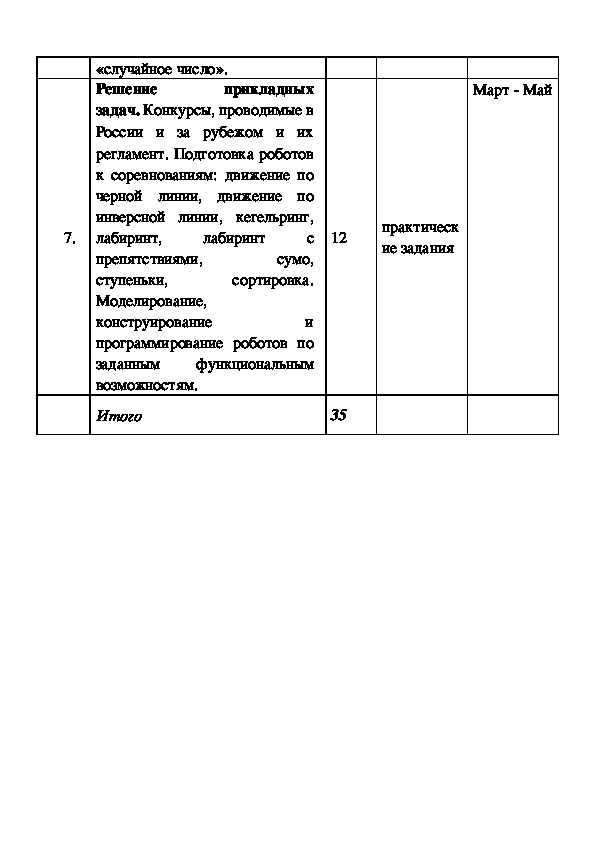
Цикл Март Май
12
практическ
ие задания
«случайное число».
Решение
прикладных
задач. Конкурсы, проводимые в
России и за рубежом и их
регламент. Подготовка роботов
к соревнованиям: движение по
черной линии, движение по
инверсной линии, кегельринг,
лабиринт,
с
препятствиями,
сумо,
ступеньки,
сортировка.
Моделирование,
и
конструирование
программирование роботов по
заданным функциональным
возможностям.
лабиринт
7.
Итого
35 1. Филиппов С.А. Робототехника для детей и родителей – СПб.: Наука,
Список литературы
2011. – 263с.
2.
Загвязинский В. И. Теория обучения: Современная интерпретация:
Учебное пособие для вузов. 3е изд., испр. — М.: Академия, 2006. — 192с.
3.
Официальный сайт Lego Mindstorms NXT [Электронный ресурс] режим
доступа: http://mindstorms.lego.com/
4.
Современные педагогические и информационные технологии в системе
образования: Учебное пособие / Е. С. Полат , М. Ю. Бухаркина – 3е изд., стер. —
М.: Издательский центр «Академия», 2010. – 368с.
5. Фатеева И. А. Метод «портфолио» как приоритетная инновационная
технология в образовании: преемственность между средней школой и вузом [Текст] /
И. А. Фатеева, Т. Н. Канатникова // Молодой ученый. — 2012. — №12. — С. 526528.
Дьяченко В.К. Сотрудничество в обучении. — М.: Просвещение,
6.
1991. — 192с.
7. Юцявичене П. А. Теория и практика модульного обучения. Каунас,
1989. — 272с.
8.
Данильсон Т. С., Румбешта Е. А. Модульнодеятельностный подход в
обучении физике// Вестн. Томского гос. пед. унта. №10. 2010. — С.3538
9.
Оконь В. Основы проблемного обучения. Пер. с польск. — М.:
«Просвещение», 1968. — 208 с.
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год

Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Рабочая программа по внеурочной деятельности «Робототехника», реализующая ФГОС ООО 8 класс 2016 - 2017 учебный год
Материалы на данной страницы взяты из открытых истончиков либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
28.04.2017
© ООО «Знанио»
С вами с 2009 года.
![]()
О портале