Поделиться

Тема: Движение по чёрной линии. Релейный регулятор
Цель: познакомить обучающих с релейным регулятором для движения по чёрной линии
Задачи:
· Научить обучающихся определять среднее значение серого для светоцветовых датчиков
· Написать программу для релейного регулятора
· Проехать по чёрной линии при помощи релейного регулятора
Оборудование:
· Компьютер с установленной программой
· Наборы Mundstorms EV3
· Поле с черной линией шириной 25 мм
Материал для урока
Регулятор – это устройство, выполняющее задачу поддержания объекта управления в определённом состоянии. Регулятор получает информацию о состоянии объекта управления с помощью датчиков и вырабатывает управляющее воздействие для того, чтобы его корректировать.
Регуляторы часто встречаются в повседневной жизни: кондиционер поддерживает температуру в помещении, стиральная машина умеет поддерживать скорость вращения барабана с помощью специальных датчиков – энкодеров, кулер в компьютере тоже имеет регулятор, так скорость его вращения зависит от температуры нагревания процессора.
Есть и совсем простой бытовой пример – регулятор уровня воды в бачке унитаза. Принцип прост: если в бачке уровень воды ниже определённой планки - клапан открывается, если наоборот, выше – клапан закрывается.
Релейный регулятор
Релейный регулятор – это тип регуляторов, который может вырабатывать ограниченное количество вариантов (положений регулятора) движения, обычно от 2 до 4.
 Построим
стандартную двухмоторную тележку одним датчиком цвета. Желательно, чтобы
ведущие колёса и датчик, образовывали собой равносторонний треугольник, тогда
движение будет наиболее стабильным.
Построим
стандартную двухмоторную тележку одним датчиком цвета. Желательно, чтобы
ведущие колёса и датчик, образовывали собой равносторонний треугольник, тогда
движение будет наиболее стабильным.

Робот должен двигаться по границе линии, находясь датчиком между белым и чёрным. Построим двухпозиционный релейный регулятор, который заставит робота поворачивать вправо, когда датчик находится над белым, и поворачивать влево, когда датчик находится над чёрным.

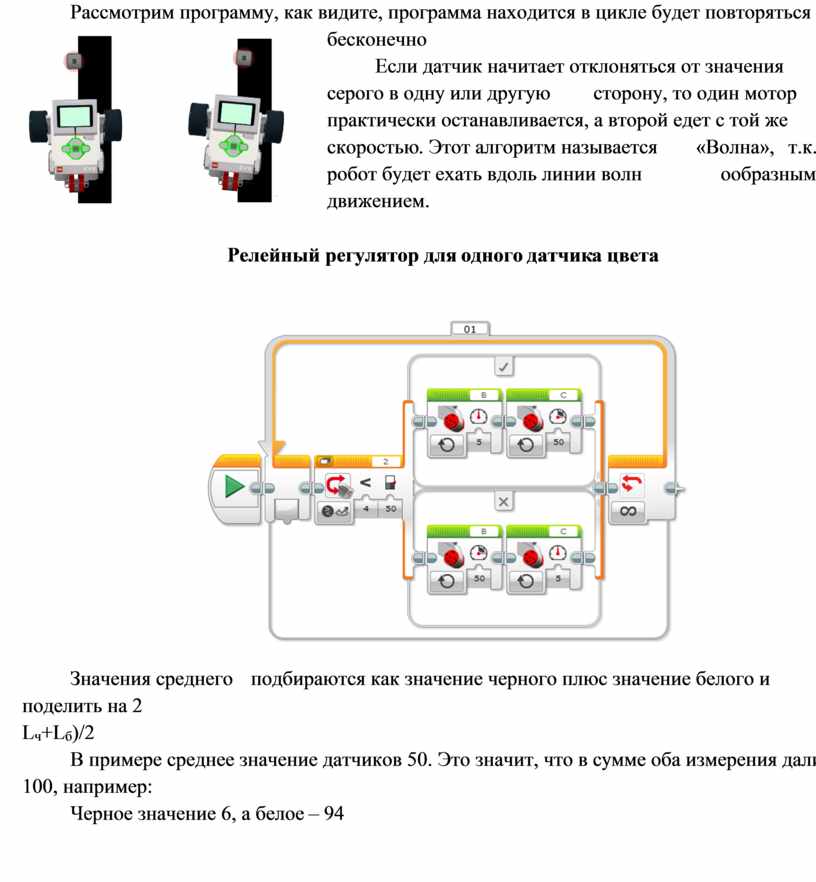
 Рассмотрим
программу, как видите, программа находится в цикле будет повторяться бесконечно
Рассмотрим
программу, как видите, программа находится в цикле будет повторяться бесконечно
Если датчик начитает отклоняться от значения серого в одну или другую сторону, то один мотор практически останавливается, а второй едет с той же скоростью. Этот алгоритм называется «Волна», т.к. робот будет ехать вдоль линии волнообразным движением.
Релейный регулятор для одного датчика цвета
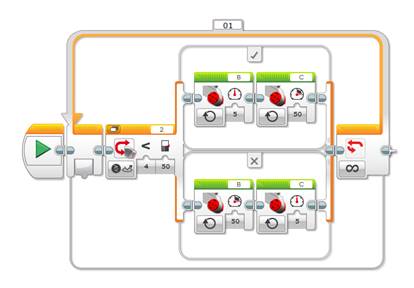
Значения среднего подбираются как значение черного плюс значение белого и поделить на 2
(Lч+Lб)/2
В примере среднее значение датчиков 50. Это значит, что в сумме оба измерения дали 100, например:
Черное значение 6, а белое – 94
(6+94)/2=50
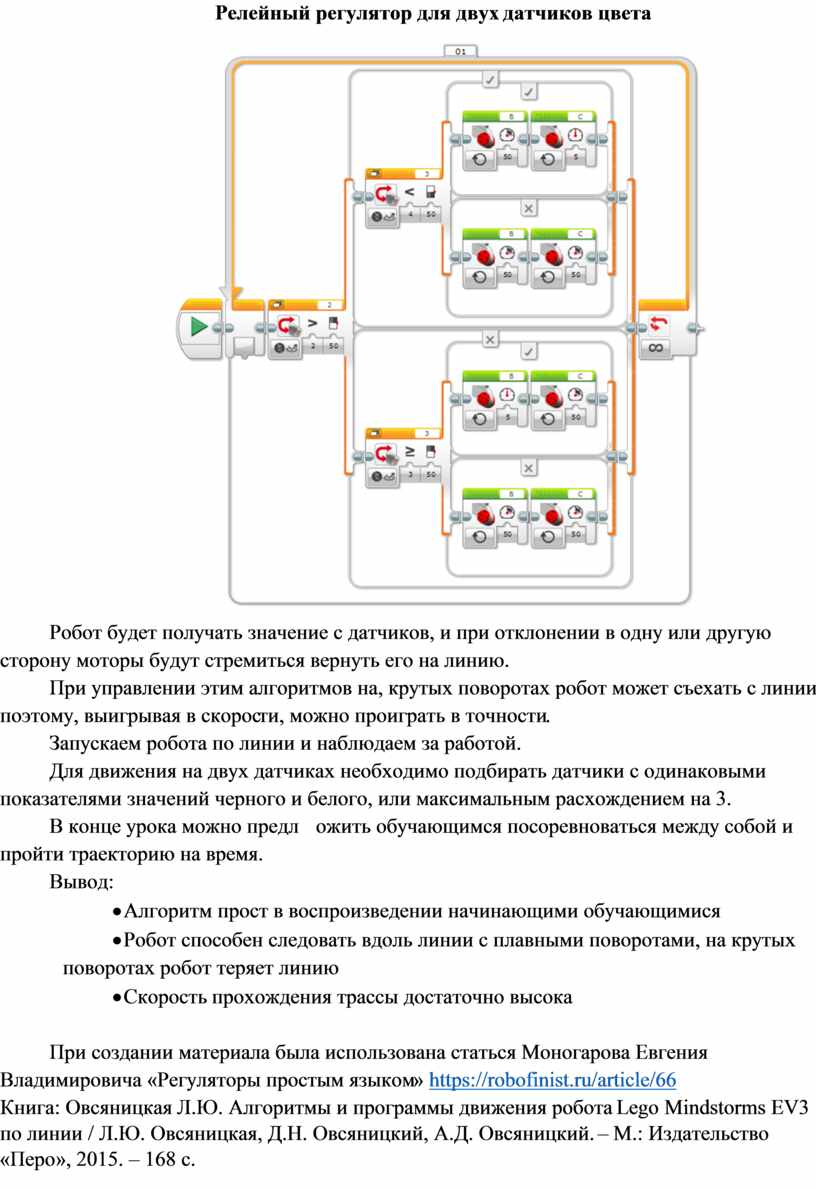
Релейный регулятор для двух датчиков цвета

Робот будет получать значение с датчиков, и при отклонении в одну или другую сторону моторы будут стремиться вернуть его на линию.
При управлении этим алгоритмов на, крутых поворотах робот может съехать с линии, поэтому, выигрывая в скорости, можно проиграть в точности.
Запускаем робота по линии и наблюдаем за работой.
Для движения на двух датчиках необходимо подбирать датчики с одинаковыми показателями значений черного и белого, или максимальным расхождением на 3.
В конце урока можно предложить обучающимся посоревноваться между собой и пройти траекторию на время.
Вывод:
· Алгоритм прост в воспроизведении начинающими обучающимися
· Робот способен следовать вдоль линии с плавными поворотами, на крутых поворотах робот теряет линию
· Скорость прохождения трассы достаточно высока
При создании материала была использована статься Моногарова Евгения Владимировича «Регуляторы простым языком» https://robofinist.ru/article/66
Книга: Овсяницкая Л.Ю. Алгоритмы и программы движения робота Lego Mindstorms EV3 по линии / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий. – М.: Издательство «Перо», 2015. – 168 с.
Скачано с www.znanio.ru
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.