

Элективный курс
10 класс
"Образовательная Робототехника"
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Использование конструктора LEGO EV3 позволяет создать уникальную образовательную среду, которая способствует развитию инженерного, конструкторского мышления. В процессе работы с LEGO EV3 ученики приобретают опыт решения как типовых, так и нешаблонных задач по конструированию, программированию, сбору данных. Кроме того, работа в команде способствует формированию умения взаимодействовать с соучениками, формулировать, анализировать, критически оценивать, отстаивать свои идеи.
LEGO EV3 обеспечивает простоту при сборке начальных моделей, что позволяет ученикам получить результат в пределах одного или пары уроков. И при этом возможности в изменении моделей и программ – очень широкие, и такой подход позволяет учащимся усложнять модель и программу, проявлять самостоятельность в изучении темы. Программное обеспечение LEGO MINDSTORMS Education EV3 обладает очень широкими возможностями, в частности, позволяет вести рабочую тетрадь и представлять свои проекты прямо в среде программного обеспечения LEGO EV3.
Цель курса:
Изучение курса «Образовательная робототехника» на уровне основного общего образования
направлено на достижение следующей цели: развитие интереса школьников к технике и техническому творчеству.
Задачи:
1. Познакомить с практическим освоением технологий проектирования, моделирования и изготовления простейших технических моделей.
2. Развивать творческие способности и логическое мышление.
3. Выявить и развить природные задатки и способности детей, помогающие достичь успеха в техническом творчестве.
Место курса «Образовательная робототехника» в учебном плане
На изучение курса «Робототехника» в 10 классе отводится 35 часов из расчета 1 час в неделю.
Общая характеристика элективного курса
Одной из важных проблем в России являются её недостаточная обеспеченность инженерными кадрами и низкий статус инженерного образования. Сейчас необходимо вести популяризацию профессии инженера. Интенсивное использование роботов в быту, на производстве и поле боя требует, чтобы пользователи обладали современными знаниями в области управления роботами, что позволит развивать новые, умные, безопасные и более продвинутые автоматизированные системы. Необходимо прививать интерес учащихся к области робототехники и автоматизированных систем.
Также данный курс даст возможность школьникам закрепить и применить на практике полученные знания по таким дисциплинам, как математика, физика, информатика, технология. На занятиях по техническому творчеству учащиеся соприкасаются со смежными образовательными областями. За счет использования запаса технических понятий и специальных терминов расширяются коммуникативные функции языка, углубляются возможности лингвистического развития обучающегося.
При ознакомлении с правилами выполнения технических и экономических расчетов при проектировании устройств и практическом использовании тех или иных технических решений школьники знакомятся с особенностями практического применения математики. Осваивая приемы проектирования и конструирования, ребята приобретают опыт создания реальных и виртуальных демонстрационных моделей.
Подведение итогов работы проходит в форме общественной презентации (выставка, состязание, конкурс, конференция и т.д.).
Для реализации программы используются образовательные конструкторы фирмы Lego, конструктор LEGO MINDSTORMS Education EV3. Он представляет собой набор конструктивных деталей, позволяющих собрать многочисленные варианты механизмов, набор датчиков, двигатели и микрокомпьютер EV3, который управляет всей построенной конструкцией. C конструктором LEGO MINDSTORMS Education EV3 идет необходимое программное обеспечение.
СОДЕРЖАНИЕ
1. Введение в робототехнику (2 ч)
Роботы. Виды роботов. Значение роботов в жизни человека. Основные направления применения роботов. Искусственный интеллект. Правила работы с конструктором LEGO
Управление роботами. Методы общения с роботом. Состав конструктора LEGO MINDSTORMS EV3. Визуальные языки программирования. Их основное назначение и возможности. Команды управления роботами. Среда программирования модуля, основные блоки.
2. Знакомство с роботами LEGO MINDSTORMS EV3 EDU. (4 ч)
Правила техники безопасности при работе с роботами-конструкторами. Правила обращения с роботами. Основные механические детали конструктора. Их название и назначение.
Модуль EV3. Обзор, экран, кнопки управления модулем, индикатор состояния, порты. Установка батарей, способы экономии энергии. Включение модуля EV3. Запись программы и запуск ее на выполнение. Сервомоторы EV3, сравнение моторов. Мощность и точность мотора. Механика механизмов и машин.
Виды соединений и передач и их свойства.
Сборка роботов. Сборка модели робота по инструкции. Программирование движения вперед по прямой траектории. Расчет числа оборотов колеса для прохождения заданного расстояния.
3. Датчики LEGO MINDSTORMS EV3 EDU и их параметры. (6 ч)
Датчики. Датчик касания. Устройство датчика. Практикум. Решение задач на движение с использованием датчика касания.
Датчик цвета, режимы работы датчика. Решение задач на движение с использованием датчика цвета.
Ультразвуковой датчик. Решение задач на движение с использованием датчика расстояния.
Гироскопический датчик. Инфракрасный датчик, режим приближения, режим маяка.
Подключение датчиков и моторов.
Интерфейс модуля EV3. Приложения модуля. Представление порта.
Управление мотором.
Проверочная работа № 1 по теме «Знакомство с роботами LEGO MINDSTORMS».
4. Основы программирования и компьютерной логики (9 ч)
Среда программирования модуля. Создание программы. Удаление блоков. Выполнение программы. Сохранение и открытие программы.
Счетчик касаний. Ветвление по датчикам. Методы принятия решений роботом. Модели поведения при разнообразных ситуациях.
Программное обеспечение EV3. Среда LABVIEW. Основное окно. Свойства и структура проекта. Решение задач на движение вдоль сторон квадрата. Использование циклов при решении задач на движение.
Программные блоки и палитры программирования. Страница аппаратных средств. Редактор контента. Инструменты. Устранение неполадок. Перезапуск модуля.
Решение задач на движение по кривой. Независимое управление моторами. Поворот на заданное число градусов. Расчет угла поворота.
Использование нижнего датчика освещенности. Решение задач на движение с остановкой на черной линии. Решение задач на движение вдоль линии. Калибровка датчика освещенности.
Программирование модулей. Решение задач на прохождение по полю из клеток. Соревнование роботов на тестовом поле.
5. Практикум по сборке роботизированных систем (8 ч)
Измерение освещенности. Определение цветов. Распознавание цветов.
Использование конструктора Lego в качестве цифровой лаборатории.
Измерение расстояний до объектов. Сканирование местности.
Сила. Плечо силы. Подъемный кран. Счетчик оборотов. Скорость вращения сервомотора. Мощность. Управление роботом с помощью внешних воздействий.
Реакция робота на звук, цвет, касание. Таймер.
Движение по замкнутой траектории. Решение задач на криволинейное движение.
Конструирование моделей роботов для решения задач с использованием нескольких разных видов датчиков. Решение задач на выход из лабиринта.
Ограниченное движение.
Проверочная работа №2 по теме «Виды движений роботов»
6. Творческие проектные работы и соревнования(6 ч)
Правила соревнований. Работа над проектами «Движение по заданной траектории», «Кегельринг». Соревнование роботов на тестовом поле.
Конструирование собственной модели робота. Программирование и испытание собственной модели робота. Подведение итогов работы учащихся. Подготовка докладов, презентаций, стендовых материалов для итоговой конференции. Завершение создания моделей роботов для итоговой выставки.
Тематическое планирование
|
|
Наименование разделов и тем |
Всего часов |
Виды деятельности |
|
1 |
Введение в робототехнику |
2 |
Слушают историю развития робототехники. |
|
2 |
Знакомство с роботами LEGO MINDSTORMS EV3 EDU. |
4 |
Изучают основные детали конструкторов |
|
3 |
Датчики LEGO и их параметры. |
6 |
Изучают датчик, программируют роботов |
|
4 |
Основы программирования и компьютерной логики |
9 |
Изучают программу для программирования роботов, составляют простейшие программы для роботов |
|
5 |
Практикум по сборке роботизированных систем |
8 |
Собирают модели по схемам и собственные модели |
|
6 |
Творческие проектные работы и соревнования |
6 |
Выполняют творческие проекты |
|
ВСЕГО |
35 |
|
|
Ожидаемые результаты и способы их проверки
Устойчивое развитие воспитательных результатов внеурочной деятельности предполагает три уровня результатов.
– приобретение школьником социальных знаний, понимания социальной реальности и повседневной жизни.
– формирование позитивных отношений
школьника к базовым ценностям общества (человек, семья, Отечество, природа, мир, знания, труд, культура), ценностного отношения к социальной реальности в целом. Для достижения данного уровня результатов особое значение имеет равноправное взаимодействие школьника с другими школьниками на уровне класса, школы, то есть в защищенной, дружественной ему социальной среде. Именно в такой близкой социальной среде ребенок получает (или не получает) первое практическое подтверждение приобретенных социальных знаний, начинает их ценить (или отвергает).
– получение школьником опыта самостоятельного социального действия. Для дости-жения данного уровня результатов особое значение имеет взаимодействие школьника с социальными субъектами за пределами школы, в открытой общественной среде.
На выходе из кружка обучающийся должен иметь:
наличие интереса к трудовой деятельности;
стремление к творческому самовыражению через работу с конструктором LEGO
Mindstorms Eduсation EV3; навыки владения основными принципами механики;
навыки владения основами программирования в компьютерной среде моделирования
LEGO Mindstorms Eduсation EV3; навыки работы по алгоритму.
Характеристика знаний, умений, которые должны получить обучающиеся, определяется в соответствии с теоретическими и практическим пунктами программы.
В конце учебного курса кружка «Робототехника» обучающиеся должны знать правила техники безопасности; правила работы с конструктором LEGO Mindstorms Eduсation EV3, принципы работы датчиков: касания, освещённости, расстояния, знать блоки компьютерной программы: дисплей, движение, цикл, блок датчиков, блок переключателей.
Учащиеся должны уметь создавать роботов посредством конструктора LEGO Mindstorms Eduсation EV3, проводить эксперименты на определение прочности конструкции, устойчивости модели; эксперименты с блоком и рычагом, ременной передачей; эксперименты с шасси; преобразование энергии ветра, а также писать программы: «движение «вперёд-назад», «движение с ускорением», «робот-волчок», «восьмёрка», «змейка», «поворот на месте», «спираль», «парковка», «выход из лабиринта», «движение по линии»; изготавливать модели роботов согласно алгоритму действий, создавать эскизы своих собственных моделей и воплощать замысел.
Основным способом проверки результатов обучающихся является изготовление модели робота посредством конструктора LEGO Mindstorms Eduсation EV3 во время проведения творческих мастерских, также используется тестовая форма, мини-опросы во время занятий-практикумов, игровые формы контроля, участие в конкурсах и выставках различного уровня.
КАЛЕНДАРНО-ТЕМАТИЧЕСКОЕ ПЛАНИРОВАНИЕ
10 класс
|
|
|
Раздел/ Тема |
|
Планируемые результаты обучения |
Виды контроля |
||
|
Предметные результаты |
Универсальные учебные действия УУД |
Личностные результаты |
|||||
|
|
|
|
Тема 1. Введение в робототехнику (2 ч) |
||||
|
|
1 |
Роботы. Виды роботов. Значение роботов в жизни человека. Основные направления применения роботов. Правила работы с конструктором LEGO |
1 |
Иметь общие представления о значение роботов в жизни человека. Знать правила работы с конструктором |
Регулятивные: целеполагание – формулировать и удерживать учебную задачу; планирование – выбирать действия в соответствии с поставленной задачей и условиями ее реализации. Познавательные: общеучебные – использовать общие приемы решения поставленных задач; Коммуникативные: инициативное сотрудничество – ставить |
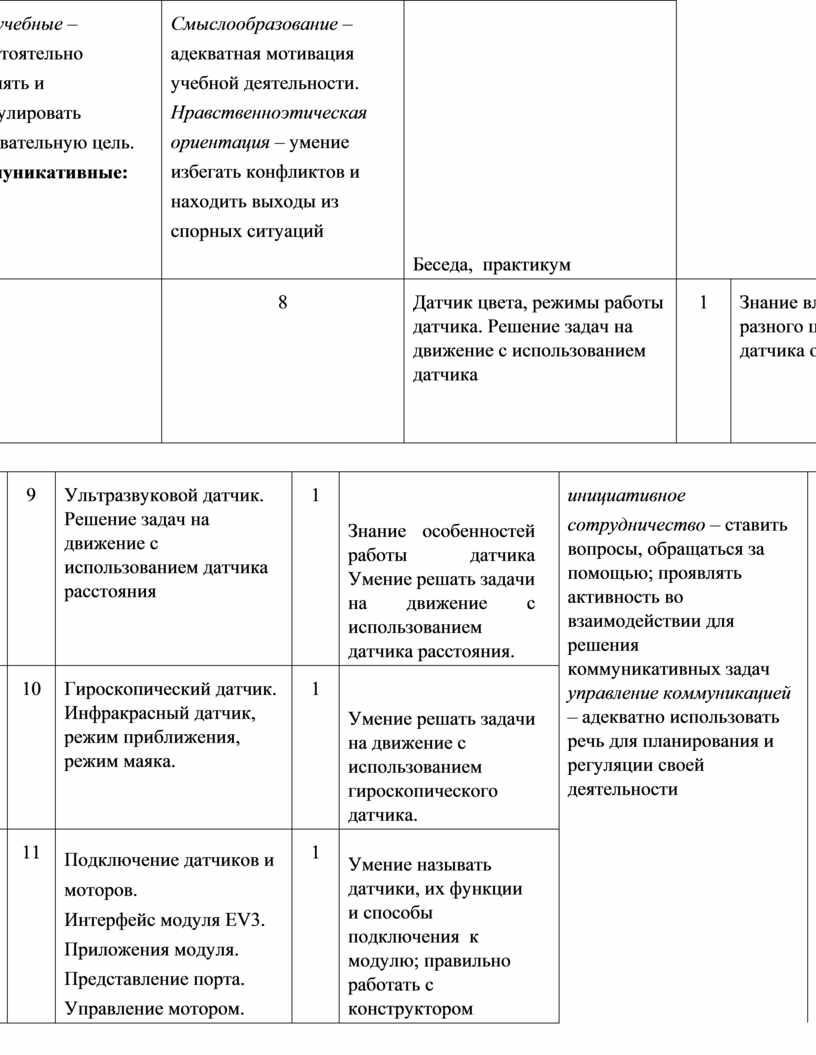
Смыслообразование – адекватная мотивация учебной деятельности. Нравственноэтическая ориентация – умение избегать конфликтов и находить выходы из спорных ситуаций
|
Беседа, Зачет по правилам работы с конструктором LEGO |
|
|
2 |
Управление роботами. Методы общения с роботом. Состав конструктора LEGO MINDSTORMS EV3. Языки программирования. Среда программирования модуля, основные блоки. |
1 |
Знание понятия алгоритма, исполнителя алгоритма, системы команд исполнителя (СКИ) Иметь общее представление о среде программирования модуля, основных блоках. |
Индивидуальный, фронтальный опрос |
||
|
|
|
|
|
|
вопросы, обращаться за помощью, проявлять активность для решения коммуникативных задач |
|
|
|
Тема 2. Знакомство с роботами LEGO MINDSTORMS EV3 EDU. (4 ч) |
|||||||
|
|
3 |
Правила техники безопасности при работе с роботамиконструкторами. Правила обращения с роботами. Основные механические детали конструктора и их назначение. |
1 |
Знание составных частей универсального комплекта LEGO MINDSTORMS EV3 EDU и их функций. Способность учащихся воспроизвести этапы сборки и ответить на вопросы. |
Регулятивные: планирование – выбирать действия в соответствии с поставленной задачей и условиями ее реализации. Познавательные: общеучебные – умение самостоятельно выделять и формулировать познавательную цель умение разделять процессы на этапы, звенья; выделение характерных причинно-следственных связей. Коммуникативные: инициативное сотрудничество – ставить вопросы, обращаться за помощью; проявлять активность во |
Смыслообразование – адекватная мотивация учебной деятельности; актуализация сведений из личного жизненного опыта; формирование готовности к продолжению обучения с целью получения инженерного образования; освоение типичных ситуаций управления роботами. Нравственноэтическая ориентация – умение избегать конфликтов |
Беседа Зачет по правилам техники безопасности |
|
|
4 |
Модуль EV3. Обзор, экран, кнопки управления модулем, индикатор состояния, порты. Установка батарей, способы экономии энергии. Включение модуля EV3. Запись программы и запуск ее на выполнение. |
1 |
Знание назначение кнопок модуля EV3. Умение составить простейшую программу по шаблону, сохранять и запускать программу на выполнение |
Беседа, практикум |
||
|
|
5 |
Сервомоторы EV3, сравнение моторов. |
|
Знание параметров мотора и их влияние на |
Беседа, практикум |
||
|
|
|
Мощность и точность мотора. Механика механизмов и машин. Виды соединений и передач и их свойства. |
|
работу модели Иметь представление о видах соединений и передач. |
взаимодействии для решения коммуникативных задач |
и находить выходы из спорных ситуаций |
|
|
|
6 |
Сборка модели робота по инструкции. Программирование движения вперед по прямой траектории. Расчет числа оборотов колеса для прохождения заданного расстояния. |
1 |
Способность учащихся воспроизвести этапы сборки и ответить на вопросы. Умение выполнить расчет числа оборотов колеса для прохождения заданного расстояния. |
Беседа, практикум |
||
|
Тема 3. Датчики LEGO MINDSTORMS EV3 EDU и их параметры. (6 ч) |
|||||||
|
|
7 |
Датчик касания. Устройство датчика. Практикум. Решение задач на движение с использованием датчика касания. |
1 |
Умение решать задачи на движение с использованием датчика касания. |
Регулятивные: планирование – выбирать действия в соответствии с поставленной задачей и условиями ее реализации. Познавательные: общеучебные – самостоятельно выделять и формулировать познавательную цель. Коммуникативные: |
Смыслообразование – адекватная мотивация учебной деятельности. Нравственноэтическая ориентация – умение избегать конфликтов и находить выходы из спорных ситуаций
|
Беседа, практикум |
|
|
8 |
Датчик цвета, режимы работы датчика. Решение задач на движение с использованием датчика |
1 |
Знание влияние предметов разного цвета на показания датчика освещенности |
Индивидуальный, собранная модель, выполняющая предполагаемые действия. |
||
|
|
9 |
Ультразвуковой датчик. Решение задач на движение с использованием датчика расстояния |
1 |
Знание особенностей работы датчика Умение решать задачи на движение с использованием датчика расстояния. |
инициативное сотрудничество – ставить вопросы, обращаться за помощью; проявлять активность во взаимодействии для решения коммуникативных задач управление коммуникацией – адекватно использовать речь для планирования и регуляции своей деятельности |
|
Индивидуальный, собранная модель, выполняющая предполагаемые действия. |
|
|
10 |
Гироскопический датчик. Инфракрасный датчик, режим приближения, режим маяка. |
1 |
Умение решать задачи на движение с использованием гироскопического датчика. |
Беседа, практикум |
||
|
|
11 |
Подключение датчиков и моторов. Интерфейс модуля EV3. Приложения модуля. Представление порта. Управление мотором. |
1 |
Умение называть датчики, их функции и способы подключения к модулю; правильно работать с конструктором |
Беседа, практикум |
||
|
|
12 |
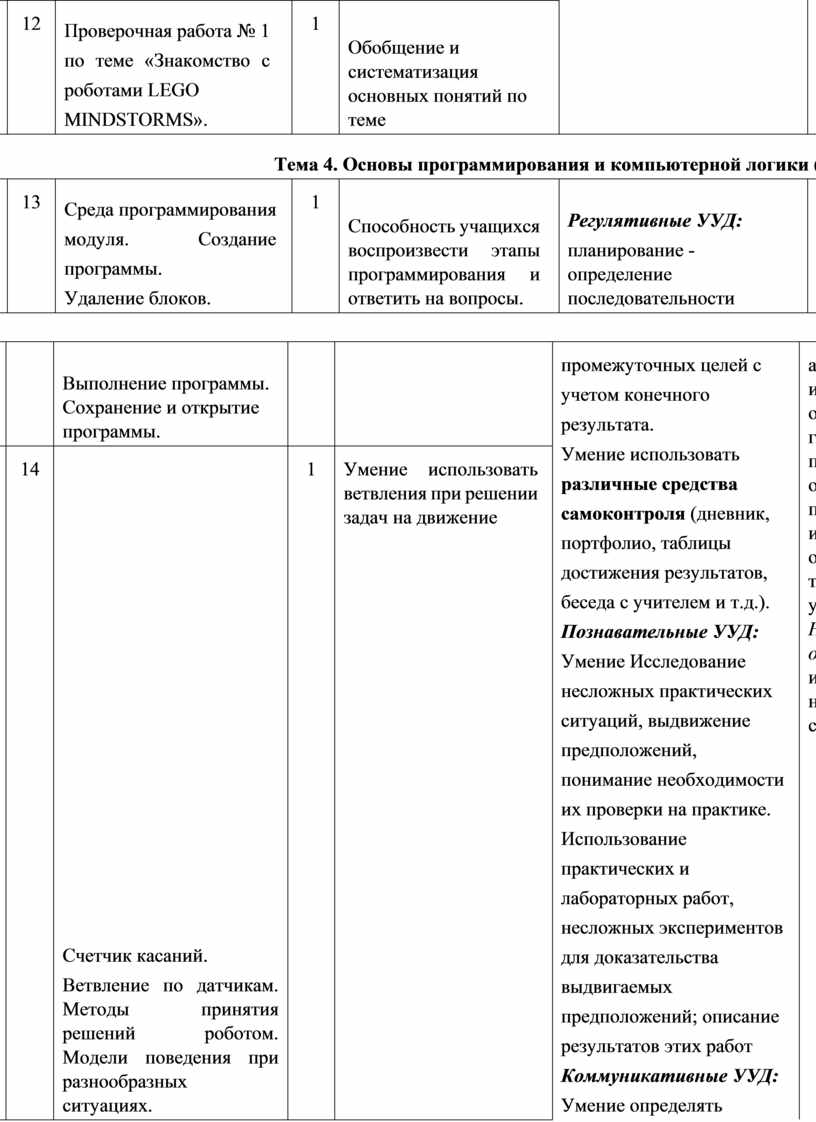
Проверочная работа № 1 по теме «Знакомство с роботами LEGO MINDSTORMS». |
1 |
Обобщение и систематизация основных понятий по теме |
Проверочная работа № 1 |
||
|
Тема 4. Основы программирования и компьютерной логики (9 ч) |
|||||||
|
|
13 |
Среда программирования модуля. Создание программы. Удаление блоков. |
1 |
Способность учащихся воспроизвести этапы программирования и ответить на вопросы. |
Регулятивные УУД: планирование - определение последовательности |
Смыслообразование – адекватная мотивация учебной деятельности; |
Беседа, практикум |
|
|
|
Выполнение программы. Сохранение и открытие программы. |
|
|
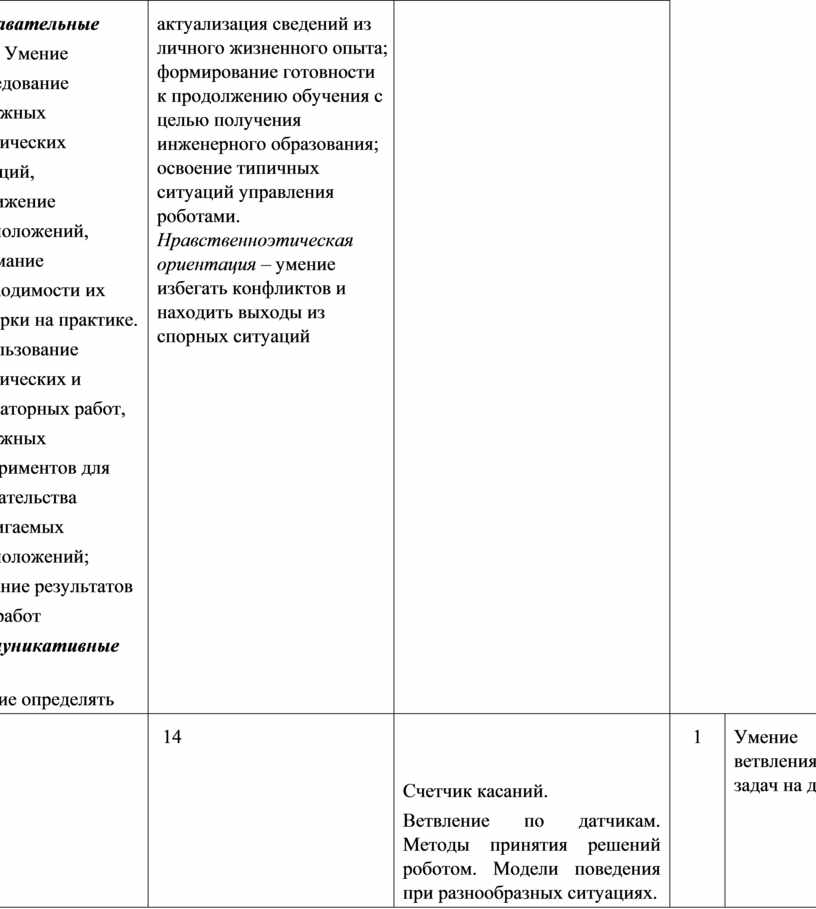
промежуточных целей с учетом конечного результата. Умение использовать различные средства самоконтроля (дневник, портфолио, таблицы достижения результатов, беседа с учителем и т.д.). Познавательные УУД: Умение Исследование несложных практических ситуаций, выдвижение предположений, понимание необходимости их проверки на практике. Использование практических и лабораторных работ, несложных экспериментов для доказательства выдвигаемых предположений; описание результатов этих работ Коммуникативные УУД: Умение определять |
актуализация сведений из личного жизненного опыта; формирование готовности к продолжению обучения с целью получения инженерного образования; освоение типичных ситуаций управления роботами. Нравственноэтическая ориентация – умение избегать конфликтов и находить выходы из спорных ситуаций |
|
|
|
14 |
Счетчик касаний. Ветвление по датчикам. Методы принятия решений роботом. Модели поведения при разнообразных ситуациях. |
1 |
Умение использовать ветвления при решении задач на движение |
Индивидуальный, собранная модель, выполняющая предполагаемые действия. |
||
|
|
15 |
Программное обеспечение EV3. Среда LABVIEW. Основное окно Свойства и структура проекта. Решение задач на движение вдоль сторон квадрата. Использование циклов при решении задач на движение. |
1 |
Умение использовать циклы при решении задач на движение |
Беседа, практикум |
||
|
|
16 |
Программные блоки и палитры программирования Страница аппаратных средств Редактор контента |
|
Способность учащихся воспроизвести этапы сборки и программирования и ответить на вопросы учителя. |
Беседа, практикум |
|
|
|
Инструменты Устранение неполадок. Перезапуск модуля |
|
|
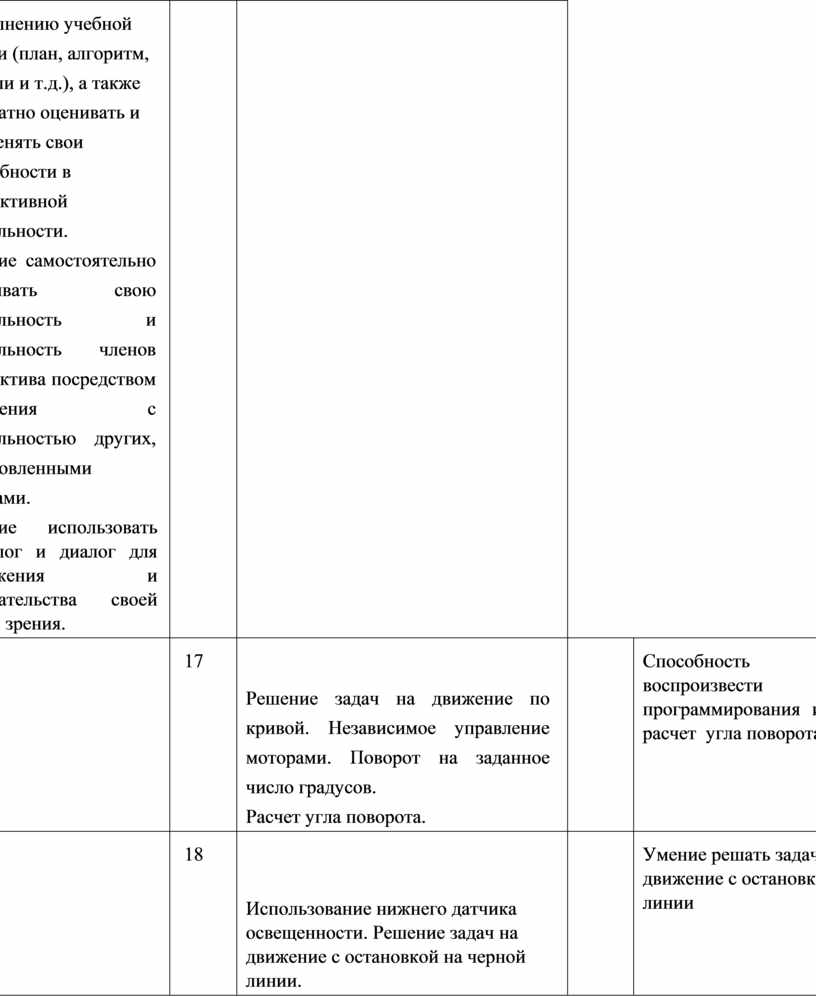
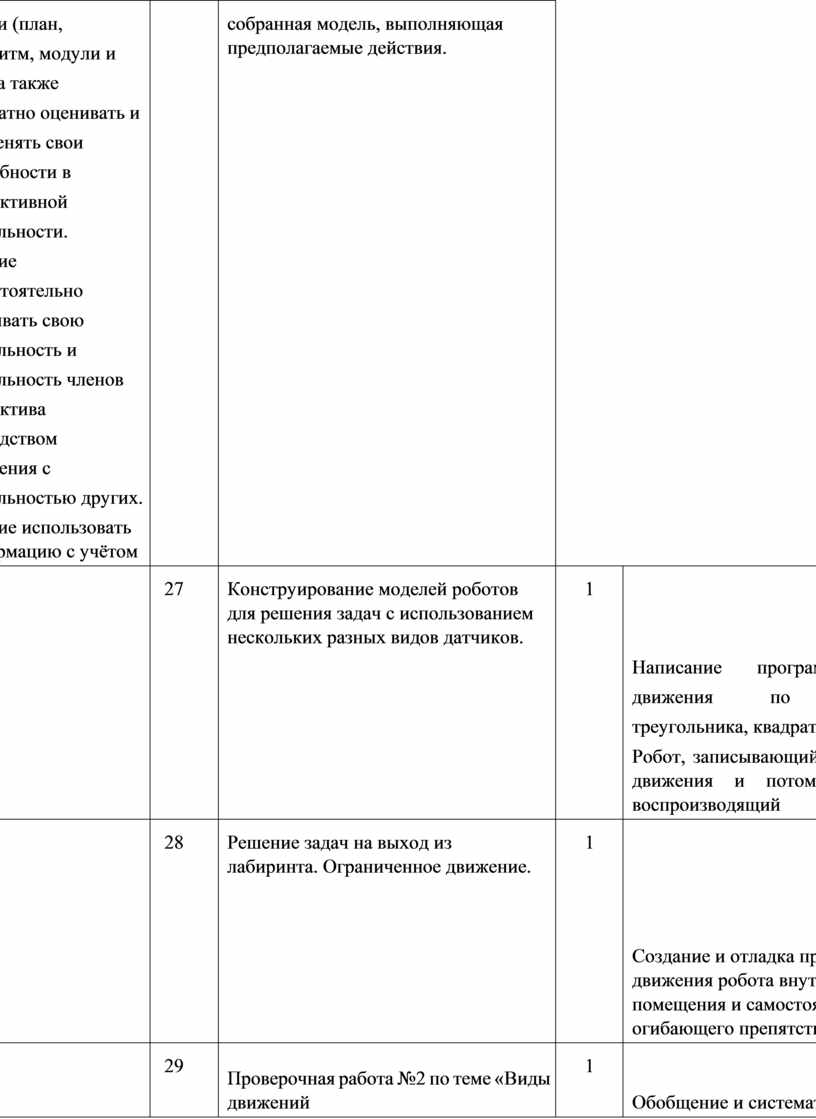
наиболее рациональную последовательность действий по коллективному выполнению учебной задачи (план, алгоритм, модули и т.д.), а также адекватно оценивать и применять свои способности в коллективной деятельности. Умение самостоятельно оценивать свою деятельность и деятельность членов коллектива посредством сравнения с деятельностью других, установленными нормами. Умение использовать монолог и диалог для выражения и доказательства своей точки зрения. |
|
|
|
|
17 |
Решение задач на движение по кривой. Независимое управление моторами. Поворот на заданное число градусов. Расчет угла поворота. |
|
Способность учащихся воспроизвести этапы программирования и выполнять расчет угла поворота. |
Индивидуальный, собранная модель, выполняющая предполагаемые действия. |
||
|
|
18 |
Использование нижнего датчика освещенности. Решение задач на движение с остановкой на черной линии. |
|
Умение решать задачи на движение с остановкой на черной линии |
Индивидуальный, собранная модель, выполняющая предполагаемые действия. |
||
|
|
19 |
Решение задач на движение вдоль линии. Калибровка датчика освещенности. |
|
Умение решать задачи на движение вдоль черной линии |
|
||
|
|
20 |
Программирование модулей. Решение задач на прохождение по полю из клеток |
|
Умение решать задачи на прохождение по полю из клеток. |
Беседа, практикум |
||
|
|
21 |
Соревнование роботов на тестовом поле. Зачет времени и количества ошибок |
|
Обобщение и систематизация основных понятий по теме «Основы |
Соревнование роботов |
|
|
|
|
|
программирования» |
|
|
|
|
Тема 5. Практикум по сборке роботизированных систем (8 ч) |
|||||||
|
|
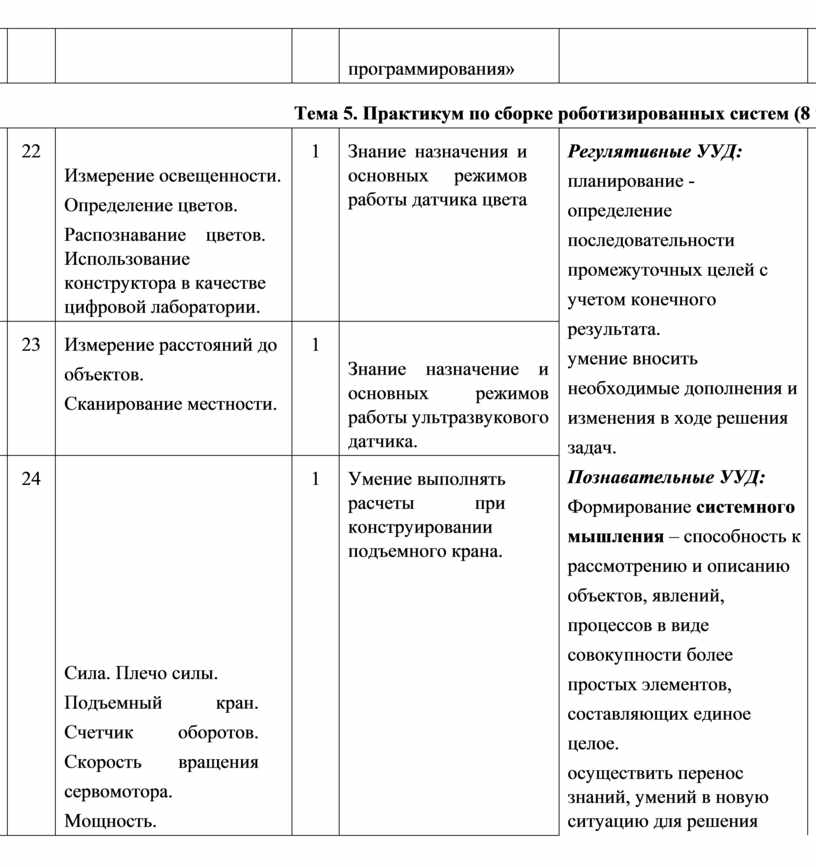
22 |
Измерение освещенности. Определение цветов. Распознавание цветов. Использование конструктора в качестве цифровой лаборатории. |
1 |
Знание назначения и основных режимов работы датчика цвета |
Регулятивные УУД: планирование - определение последовательности промежуточных целей с учетом конечного результата. умение вносить необходимые дополнения и изменения в ходе решения задач. Познавательные УУД: Формирование системного мышления – способность к рассмотрению и описанию объектов, явлений, процессов в виде совокупности более простых элементов, составляющих единое целое. осуществить перенос знаний, умений в новую ситуацию для решения |
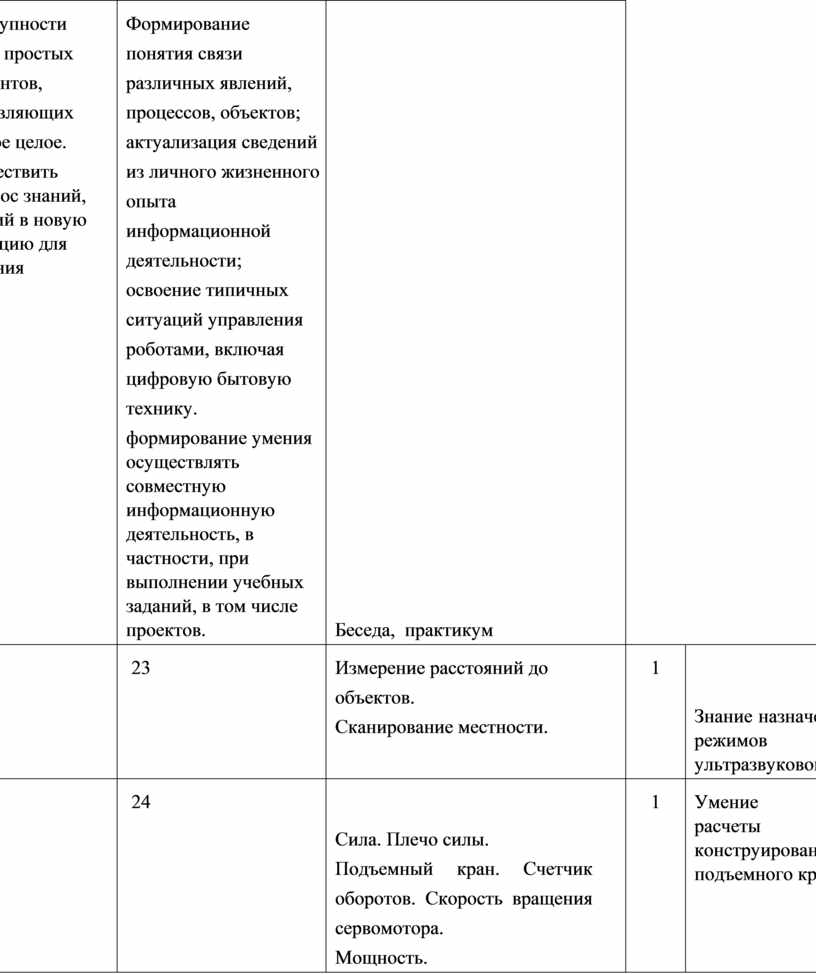
Формирование понятия связи различных явлений, процессов, объектов; актуализация сведений из личного жизненного опыта информационной деятельности; освоение типичных ситуаций управления роботами, включая цифровую бытовую технику. формирование умения осуществлять совместную информационную деятельность, в частности, при выполнении учебных заданий, в том числе проектов. |
Беседа, практикум |
|
|
23 |
Измерение расстояний до объектов. Сканирование местности. |
1 |
Знание назначение и основных режимов работы ультразвукового датчика. |
Беседа, практикум |
||
|
|
24 |
Сила. Плечо силы. Подъемный кран. Счетчик оборотов. Скорость вращения сервомотора. Мощность. |
1 |
Умение выполнять расчеты при конструировании подъемного крана. |
Беседа, практикум |
||
|
|
25 |
Управление роботом с помощью внешних воздействий. Реакция робота на звук, цвет, касание. Таймер.
|
1 |
Умение программировать робота, останавливающегося на определенном расстоянии до препятствия |
Индивидуальный, собранная модель, выполняющая предполагаемые действия. |
||
|
|
26 |
Движение по замкнутой |
|
Написание программы |
Индивидуальный, |
||
|
|
|
траектории. Решение задач на криволинейное движение. |
|
для движения по кругу через меню контроллера. Запуск и отладка программы. Написание других простых программ на выбор учащихся и их самостоятельная отладка. |
проблем, комбинировать известные средства для нового решения проблем; Коммуникативные УУД: Умение определять наиболее рациональную последовательность действий по коллективному выполнению учебной задачи (план, алгоритм, модули и т.д.), а также адекватно оценивать и применять свои способности в коллективной деятельности. Умение самостоятельно оценивать свою деятельность и деятельность членов коллектива посредством сравнения с деятельностью других. Умение использовать информацию с учётом |
|
собранная модель, выполняющая предполагаемые действия. |
|
|
27 |
Конструирование моделей роботов для решения задач с использованием нескольких разных видов датчиков. |
1 |
Написание программы для движения по контуру треугольника, квадрата. Робот, записывающий траекторию движения и потом точно её воспроизводящий |
Индивидуальный, собранная модель, выполняющая предполагаемые действия. |
||
|
|
28 |
Решение задач на выход из лабиринта. Ограниченное движение. |
1 |
Создание и отладка программы для движения робота внутри помещения и самостоятельно огибающего препятствия. |
Индивидуальный, собранная модель, выполняющая предполагаемые действия. |
||
|
|
29 |
Проверочная работа №2 по теме «Виды движений |
1 |
Обобщение и систематизация |
Проверочная работа №2 |
|
|
|
роботов» |
|
основных понятий по теме «Виды движений роботов» |
этических и правовых норм. |
|
|
|
6. Творческие проектные работы и соревнования(6 ч) |
|||||||
|
|
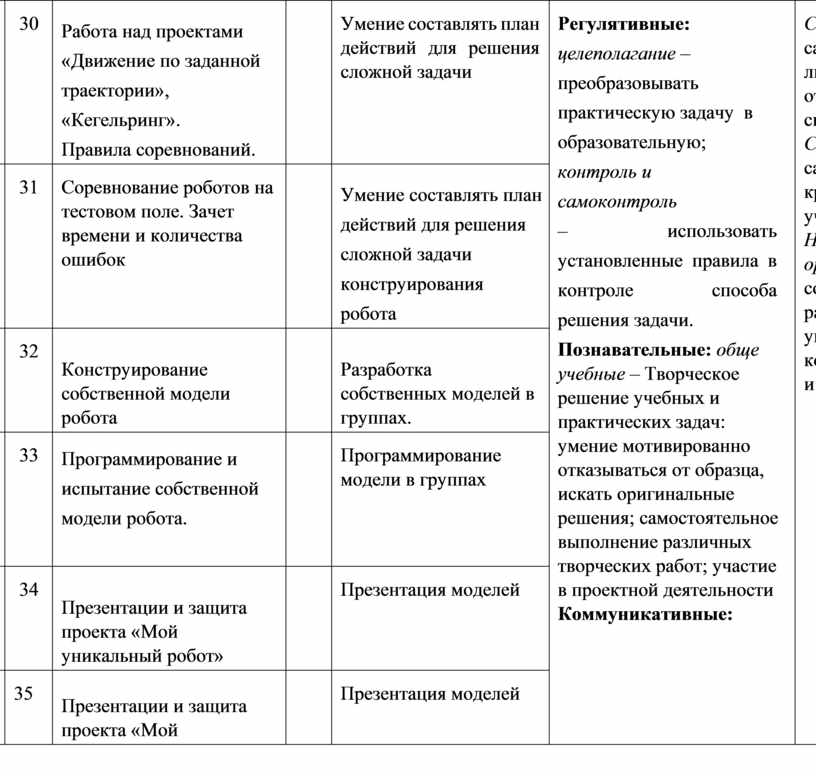
30 |
Работа над проектами «Движение по заданной траектории», «Кегельринг». Правила соревнований. |
|
Умение составлять план действий для решения сложной задачи |
Регулятивные: целеполагание – преобразовывать практическую задачу в образовательную; контроль и самоконтроль – использовать установленные правила в контроле способа решения задачи. Познавательные: обще учебные – Творческое решение учебных и практических задач: умение мотивированно отказываться от образца, искать оригинальные решения; самостоятельное выполнение различных творческих работ; участие в проектной деятельности Коммуникативные: |
Самоопределе- ние – самостоятельность и личная ответственность за свои поступки. Смыслообразование – самооценка на основе критериев успешности учебной деятельности Нравственноэтическая ориентация – навыки сотрудничества в разных ситуациях, умение не создавать конфликтных ситуаций и находить выходы |
Соревнования |
|
|
31 |
Соревнование роботов на тестовом поле. Зачет времени и количества ошибок |
|
Умение составлять план действий для решения сложной задачи конструирования робота |
Соревнования |
||
|
|
32 |
Конструирование собственной модели робота |
|
Разработка собственных моделей в группах. |
Решение задач (инд. и групп) |
||
|
|
33 |
Программирование и испытание собственной модели робота.
|
|
Программирование модели в группах |
Решение задач (инд. и групп) |
||
|
|
34 |
Презентации и защита проекта «Мой уникальный робот» |
|
Презентация моделей |
Защита проекта |
||
|
|
35 |
Презентации и защита проекта «Мой |
|
Презентация моделей |
Защита проекта |
||
|
|
|
уникальный робот» |
|
|
взаимодействие – формулировать собственное мнение и позицию |
|
|
Описание материально-технического обеспечения образовательного процесса
1. Копосов Д. Г. Первый шаг в робототехнику. Практикум \ Д. Г. Копосов.
– М.: БИНОМ. Лаборатория знаний, 2012 – 292 с.
2. Блог-сообщество любителей роботов Лего с примерами программ
[Электронный ресурс] / http://nnxt.blogspot.ru/2010/11/blog-post_21.html
3. Лабораторные практикумы по программированию [Электронный ресурс] http://www.edu.holit.ua/index.php?option=com_content&view= category&layout=blog&id=72&Itemid=159&lang=ru
4. Образовательная программа «Введение в конструирование роботов» и графический язык программирования роботов [Электронный ресурс] / http://learning.9151394.ru/course/view.php?id=280#program_blocks
5. Примеры конструкторов и программ к ним [Электронный ресурс] / Режим доступа: http://www.nxtprograms.com/index2.html
6. Программы для робота [Электронный ресурс] / http://service.lego.com/enus/helptopics/?questionid=2655
7. Учебник по программированию роботов (wiki) [Электронный ресурс] / 8. Материалы сайтов
http://www.prorobot.ru/lego.php http://nau-ra.ru/catalog/robot
http://www.239.ru/robot http://www.russianrobotics.ru/actions/actions_92.html http://habrahabr.ru/company/innopolis_university/blog/210906/STEM-
робототехника http://www.slideshare.net/odezia/2014-39493928
http://www.slideshare.net/odezia/ss-40220681 http://www.slideshare.net/odezia/180914-39396539
Элективный курс 10 класс "Образовательная
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Использование конструктора
На занятиях по техническому творчеству учащиеся соприкасаются со смежными образовательными областями
Датчики. Датчик касания. Устройство датчика
Ограниченное движение. Проверочная работа №2 по теме «Виды движений роботов» 6
Ожидаемые результаты и способы их проверки
Учащиеся должны уметь создавать роботов посредством конструктора
КАЛЕНДАРНО-ТЕМАТИЧЕСКОЕ ПЛАНИРОВАНИЕ 10 класс
Познавательные: общеучебные – использовать общие приемы решения поставленных задач;
Правила техники безопасности при работе с роботамиконструкторами
Мощность и точность мотора.
Коммуникативные: Смыслообразование – адекватная мотивация учебной деятельности
Проверочная работа № 1 по теме «Знакомство с роботами
Познавательные УУД: Умение Исследование несложных практических ситуаций, выдвижение предположений, понимание необходимости их проверки на практике
Умение самостоятельно оценивать свою деятельность и деятельность членов коллектива посредством сравнения с деятельностью других, установленными нормами
Тема 5. Практикум по сборке роботизированных систем (8 ч) 22
Формирование понятия связи различных явлений, процессов, объектов; актуализация сведений из личного жизненного опыта информационной деятельности; освоение типичных ситуаций управления роботами, включая цифровую бытовую технику
Умение самостоятельно оценивать свою деятельность и деятельность членов коллектива посредством сравнения с деятельностью других
Работа над проектами «Движение по заданной траектории», «Кегельринг»
уникальный робот» взаимодействие – формулировать собственное мнение и позицию

Описание материально-технического обеспечения образовательного процесса 1
© ООО «Знанио»
С вами с 2009 года.
![]()