Поделиться

Разработка робота-дефектоскопа для нефтяных труб с эмалированным покрытием .
Выполнил:
Устинов Роман Алексеевич
ученик 10 класса
МБОУ «СОШ №49», г. Ижевск
Руководитель:
Устинов Алексей Геннадьевич
Инженер программист
Ложкин Игорь Александрович
Учитель по предмету «Технология»
Муниципальное бюджетное общеобразовательное учреждение
«Средняя общеобразовательная школа № 49»
Проблема
Новой технологией для повышения эксплуатационных характеристик у нефтяных труб является эмалирование .
Преимущества эмалирования :
-повышается срок службы.
-увеличивается устойчивость к агрессивным средам.
-снижается себестоимость обслуживания труб.
Особое внимание в производстве ЗЭТ (завод эмалированных труб) уделяется контролю эмалированного покрытия на протяжённых участках труб большого диаметра и экспресс методам контроля , для сокращения временных издержек на выпуск готовой продукции.
Для решения данной проблемы была поставлена задача в разработке робота-дефектоскопа
2
Методы контроля качества труб
Электроискровой метод
3

УЗТ
ОПТИЧЕСКИЙ МЕТОД
ЭЛЕКТРОИСКРОВОЙ МЕТОД
Достоинства методов
Высокая точность определения толщины
Безопасность для оператора
Развитая методическая база
Низкая себестоимость
Безопасен для оператора
Короткое время контроля
Возможность контролировать покрытие на разных технологических процессах
Полный контроль всей поверхности
Возможность контролировать отсутствие слоя
4
УЗТ
ОПТИЧЕСКИЙ МЕТОД
ЭЛЕКТРОИСКРОВОЙ МЕТОД
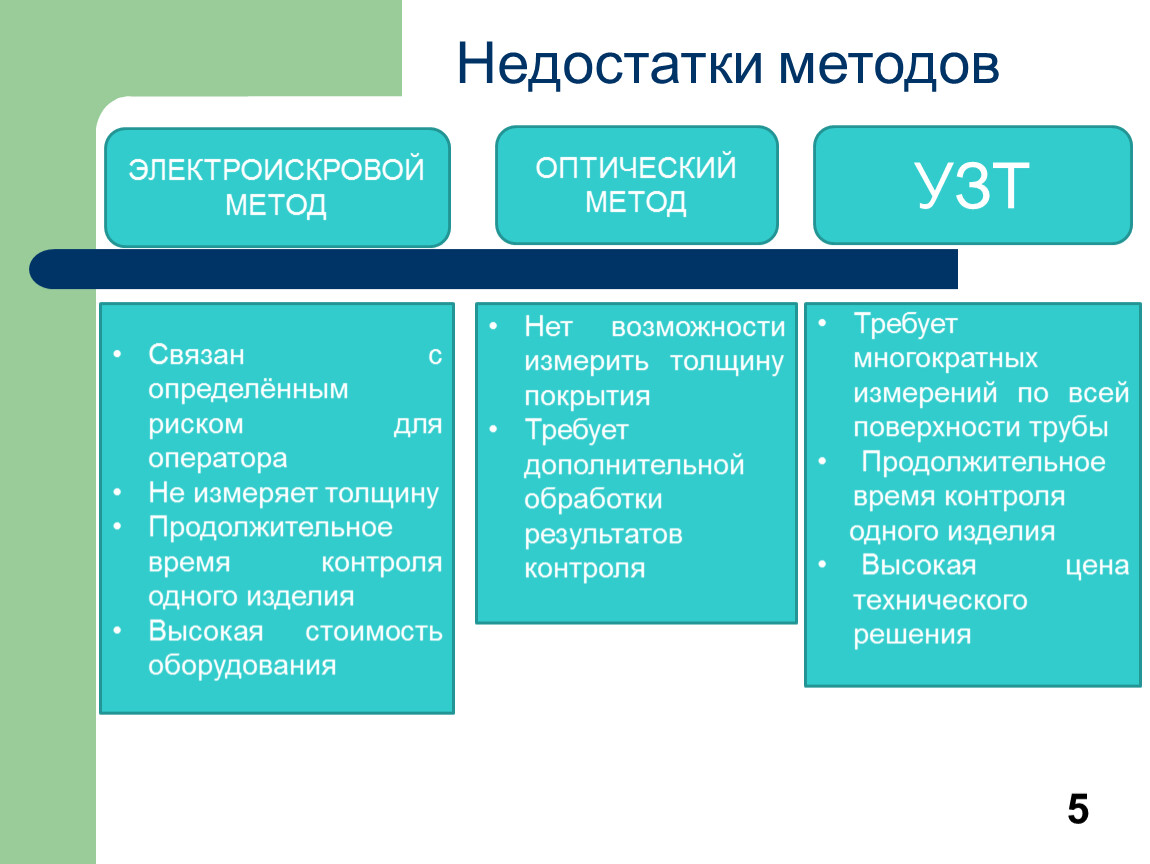
Недостатки методов
Требует многократных измерений по всей поверхности трубы
Продолжительное время контроля
одного изделия
Высокая цена технического решения
Нет возможности измерить толщину покрытия
Требует дополнительной обработки результатов контроля
Связан с определённым риском для оператора
Не измеряет толщину
Продолжительное время контроля одного изделия
Высокая стоимость оборудования
5
Вывод
На основе обзора наиболее оптимальным методом для решения задачи контроля эмалированных нефтяных труб являются оптический метод, который обладает следующими преимуществами:
невысокая стоимость;
безопасность для оператора;
оперативность контроля.
6
Актуальность
Целесообразность сокращения временных издержек изготовления эмалированных труб и повышения качества продукции не вызывает сомнения. В связи с этим актуальной задачей является разработка экспресс метода контроля эмалированных труб не уступающего по своим характеристикам традиционным методом неразрушающего контроля.
7
Цель работы
Разработать прототип робота-дефектоскопа для контроля нефтяных труб оптическим методом по средствам фото-видео сьемки изображения эмалированной поверхности труб .

Задачи
Выбор конструкций робота
Выбор технологии для создания робота
Выбор устройства фиксации изображения
Выбор методики анализа результатов контроля
Апробация результатов работы
8

Выбор конструкции робота
9
Гусеничная платформа
Колёсная платформа
Арахнопод платформа
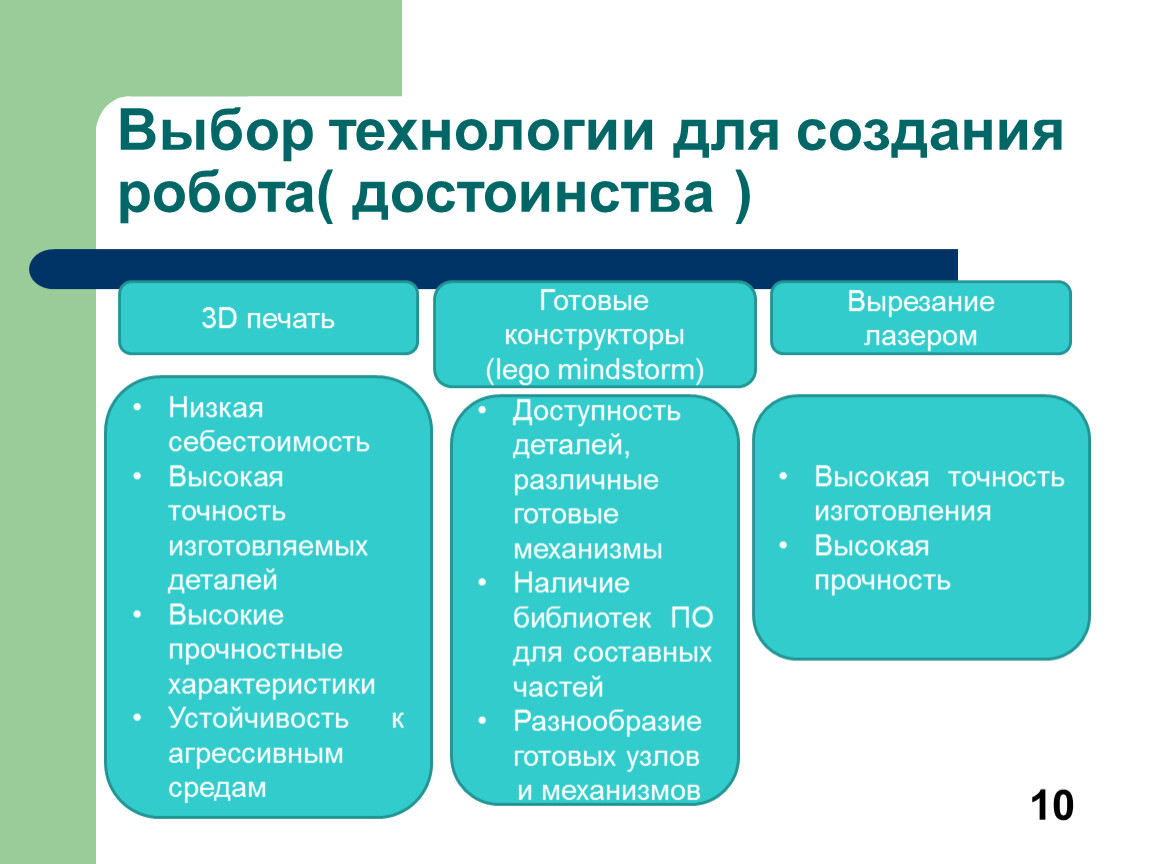
Выбор технологии для создания робота( достоинства )
10
3D печать
Готовые конструкторы
(lego mindstorm)
Вырезание лазером
Низкая себестоимость
Высокая точность изготовляемых деталей
Высокие прочностные характеристики
Устойчивость к агрессивным средам
Доступность деталей, различные готовые механизмы
Наличие библиотек ПО для составных частей
Разнообразие готовых узлов
и механизмов
Высокая точность изготовления
Высокая прочность

Сложное моделирование деталей
Нельзя создавать цельные объекты
Высокая цена производства
Требуется разработка модели в САПР
Требуется подбор материалов
Выбор технологии для создания робота (недостатки)
11
3D печать
Готовые конструкторы(lego mindstorm)
Вырезание лазером
Долгое производство деталей
Сложности в производстве деталей с нависающими частями
Требуется разработка модели в САПР
Высокая погрешность в размерах деталей
Высокая цена
деталей
Низкая прочность
Узкий набор деталей

Выбор технологии для создания робота
12
.
Прототип робота дефектоскопа
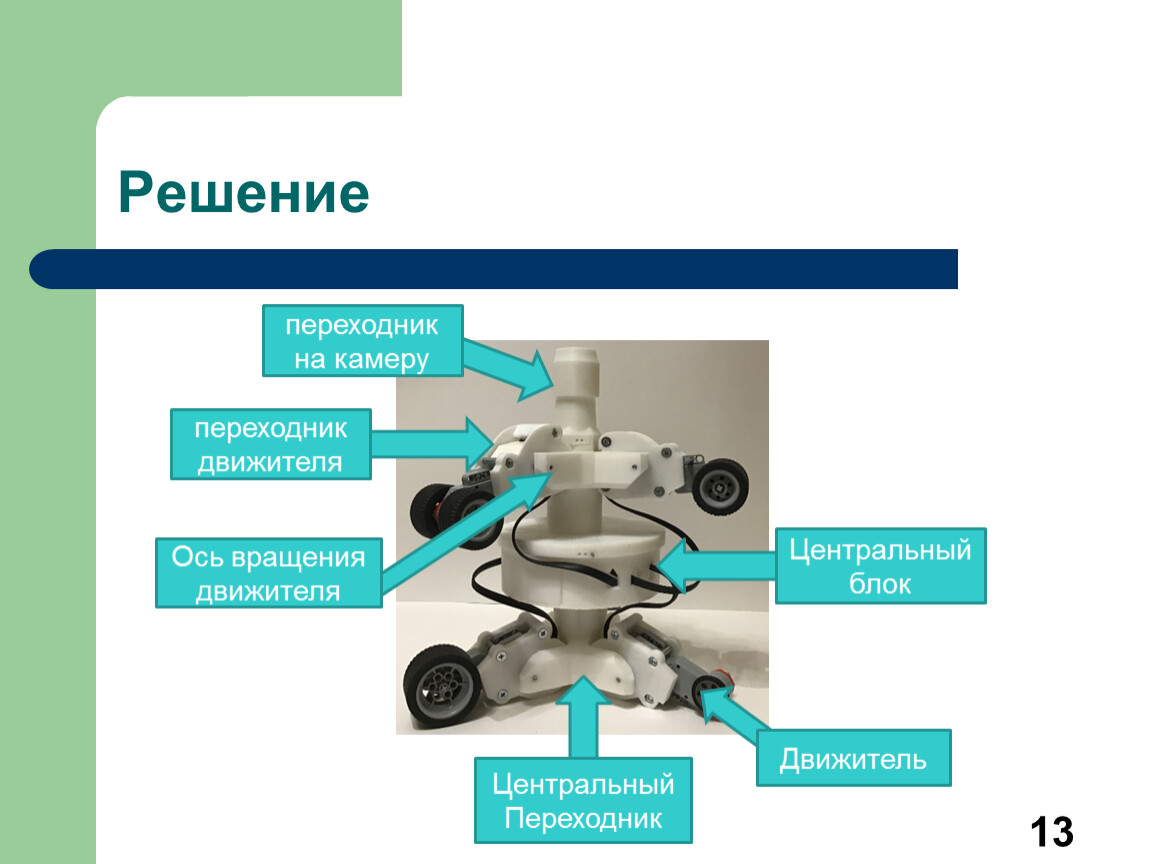
Решение
13
Ось вращения движителя
Центральный блок
Центральный Переходник
переходник движителя
Движитель
переходник на камеру

Устройство фото-видео фиксации
Xiaomi YI 4K Action Camera
14
Основные характеристики | |
Матрица | 1/2.3" |
Разрешение матрицы | 12 Мпикс |
Вес | 95 г |
Размеры | 66x20x40 мм |
Интерфейсы | USB |
Беспроводные интерфейсы | Bluetooth, Wi-Fi |
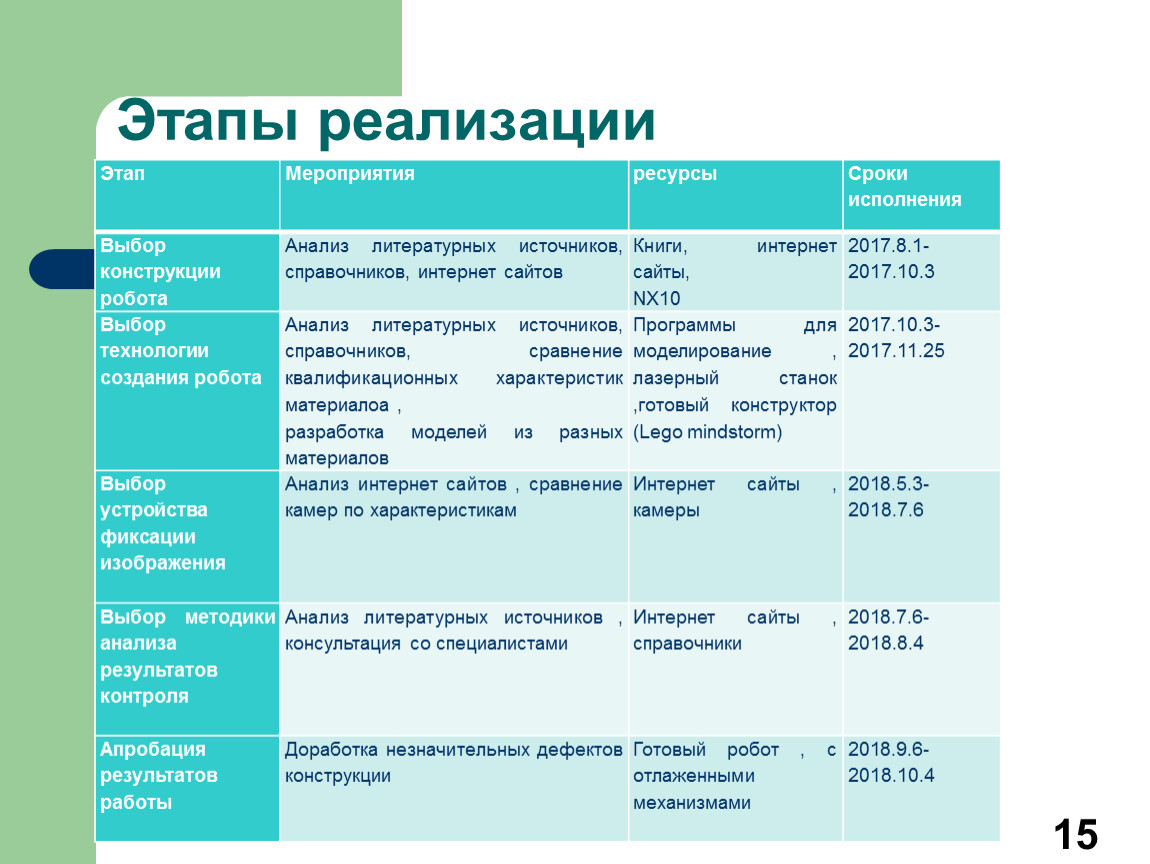
Этапы реализации
15
Этап | Мероприятия | ресурсы | Сроки исполнения |
Выбор конструкции робота | Анализ литературных источников, справочников, интернет сайтов | Книги, интернет сайты, | 2017.8.1-2017.10.3 |
Выбор технологии создания робота | Анализ литературных источников, справочников, сравнение квалификационных характеристик материалоа , | Программы для моделирование , лазерный станок ,готовый конструктор (Lego mindstorm) | 2017.10.3-2017.11.25 |
Выбор устройства фиксации изображения | Анализ интернет сайтов , сравнение камер по характеристикам | Интернет сайты , камеры | 2018.5.3-2018.7.6 |
Выбор методики анализа результатов контроля | Анализ литературных источников , консультация со специалистами | Интернет сайты , справочники | 2018.7.6-2018.8.4 |
Апробация результатов работы | Доработка незначительных дефектов конструкции | Готовый робот , с отлаженными механизмами | 2018.9.6-2018.10.4 |

Примеры дефектов
16
дефект
дефект
Изображение с фиксирующего устройства(до обработки)
После обработки
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
