
Межпредметные связи в преподавании робототехники
Современному миру свойственно наличие высокой конкуренции развитых стран в научно-технической сфере. Результаты конкуренции оказывают воздействие как на степень обороноспособности государства и на его роль на мировой арене, но и процессы в обществе, которые происходят в сферах политики и экономики.
Федеральный закон «О науке и государственной научно-технической политике», Указ Президента Российской Федерации от 07 июля 2011 г. № 899 «Об утверждении приоритетных направлений развития науки, технологий и техники в Российской Федерации и перечня критических технологий Российской Федерации» определяют приоритетные научно-технические направления Стратегии развития науки и инноваций в Российской Федерации.
Этими направлениями определяется развитие информационно-коммуникационных, транспортных, авиационных систем, перспективных вооружений, военной и специальной техники. В освоении новейших технологий Россией были сделаны огромные шаги в развитии информационно-коммуникативной сферы, а затем был сделан прорыв в линии развития робототехники.
В стране есть необходимость в подготовке инженерно-технических кадров для различных отраслей промышленности, что делает развитие робототехники в области образования особенно актуальным. Это влечет постановку перед образовательной сферой задач, предусматривающих включение робототехники в разные уровни учебного процесса. С 2008 года происходит реализация общероссийской программы выявления и продвижения перспективных кадров для высокотехнологичных отраслей «Робототехника: инженерно-технологические кадры инновационной России», что осуществляется под патронатом Федерального агентства по делам молодёжи Фонда поддержки социальных инноваций «Вольное дело».
Данная программа – это система многоуровневого непрерывного образования в сфере высоких технологий для детей, подростков, молодежи в возрасте 8-30 лет.
Цели программы:
-
развитие передовых технологий;
-
повышение уровня квалификации педагогического состава;
-
оснащение учебных заведений новой техникой;
-
стимулирование интереса у детей к научно-техническому творчеству, ранней профессиональной ориентации;
-
эффективная реализация потенциала талантливой молодежью.
Для того чтобы организовать деятельность школьников в сфере образовательной робототехники, современный рынок предлагает различные виды конструкторов, благодаря которым дети могут довольно быстро собирать конструкции, заниматься подключением датчиков и электродвигателей, составлением программы и запуском модели робота.
В число самых востребованных конструкторов для организации занятий по робототехнике входит конструктор LEGO MINDSTORMS (Дания). Он стал популярным как в России, так и во многих странах мира. Детали характеризуются высоким уровнем качества, они прочные, безопасные, легко собираются и не требует в процессе сборки использования специальных инструментов. В зависимости от возраста детей выполнена адаптация систем программирования конструктора. Предусмотрено наличие методической и дидактической поддержки различных наборов, что представлено пошаговыми инструкциями, рекомендациями для педагогов, учебными курсами и разработками занятий.
Такие компании, как HiTechnic, Mindsensors, Vernier, специализируются на выпуске оборудования, которое совместимо с конструкторами LEGO, благодаря чему происходит существенное расширение возможностей базовой версии конструктора.
К примеру, бренд Vernier Software and Tehnology и корпорации LEGO организовали совместное сотрудничество, в результате которого были разработаны адаптер и программное обеспечение, предоставляющие возможность применения датчиков Vernier с компьютеризированным устройством NXT, которое управляет конструктором MINDSTORMS.
Для второй версии программного обеспечения MINDSTORMS характерно добавление опции регистрации и графического представления информации. Это привело к возможности применения базового комплекта LEGO MINDSTORMS как инструмента для проведения учебных экспериментов.
Компанией LEGO была создана система автоматизированного проектирования LEGO Digital Designer, которая позволяет сформировать дизайнерские и конструкторские способности детей. С ее помощью осуществляется создание в виртуальном режиме на компьютере конструкции из любого набора LEGO с последующим формированием пошаговой конструкции для сборки настоящей модели робота.
Для того чтобы использовать новые технологии в процессе учебы, компанией LEGO изготавливаются разнообразные специализированные наборы по физике и технологии, в том числе:
-
«Индустрия развлечений»;
-
«Технология и физика»;
-
«Энергия, работа, мощность»;
-
«Пневматика»;
-
«Возобновляемые источники энергии».
В каждом наборе присутствует соответствующее методическое пособие, где рассказывается, как пользоваться конструктором в учебном процессе.
Недавно на российский рынок вышел бренд Fischertechnik (Германия). Составляющие их продукции аналогичны вышеперечисленным конструкторам и по качеству не уступают изделиям LEGO. Вызывают интерес конструкторы Tetrix (производитель Pitsco, США), роботы на основе микроконтроллера Arduino (Италия), роботы на базе конструктора для создания мобильных платформ «Профи» (ООО «Техновижн», Москва), Robotino (производитель Festo, Германия).
Для того чтобы были созданы программы по «оживлению» моделей конструкторов, применяются текстовые и объектно-ориентированные языки программирования с их адаптацией для технических систем. В число современных языков программирования роботов входит Microsoft Robotic Developer Studio, созданный для управления роботами и просматривания симуляции их поведения в виртуальном режиме.
Наиболее востребованными для программирования роботов LEGO являются программные продукты американской компании National Instruments, которая входит в число мировых лидеров в области разработок технологий программного управления система сбора данных и управления техническими объектами и технологическими процессами. Компания также занимается разработкой и изготовлением аппаратного и программного обеспечения для систем автоматизированного тестирования. По всему миру функционирует более 40 представительств.
Среда графического инженерного программирования LabVIEW, которая была разработана National Instruments еще в 1986 году, успешно зарекомендовала себя при организации управления техническими объектами и технологическими процессами. Последние обновления программы включают в себя специализированные блоки для программирования микропроцессора NXT для конструкторов LEGO Mindstorms.
Внедрение Федеральных государственных образовательных стандартов позволило в учебный процесс включить робототехнику в различные элементы этого процесса, например:
-
урочные формы работы, которые предполагают выполнение учебных проектов, подготовку демонстрационного эксперимента, проведение работ школьного физического практикума;
-
разнообразные формы внеурочной деятельности (творческие проектно-конструкторские работы обучающихся, участие в различных конкурсах и научно-практических конференциях, в том числе, проводимые дистанционно);
-
организация работы в системе дополнительного образования, что предполагает участие в клубной и кружковой работе.
Требования, предъявляемые Федеральными государственными образовательными стандартами, отлично согласуются с базовыми принципами организации работы учеников с робототехническими комплексами.
Моделирование, конструирование и программирование роботов с применением информационно-коммуникационных технологий характеризуется высокой степенью творчества, самостоятельностью, проявлением соперничества и коммуникации в группе. Одновременно у обучающихся формируются компетенции, которые нужны любому современному школьнику, в том числе предметные, метапредметные, коммуникативные и информационно-коммуникативные компетенции.
Несмотря на то, что применение робототехники в урочной деятельности, демонстрирует явно положительный эффект, образовательная робототехника преимущественно развивается в клубной и кружковой работе. Основная причина – отсутствие в достаточном количество методик по использованию робототехники в учебном процессе, соответственно, отсутствуют и учебные пособия для обучающихся и методические рекомендации для педагогов.
Однако в доступности имеется множество методических пособий зарубежных авторов, которые отлично себя зарекомендовали по использованию робототехники в проектной работе по химии, биологии, физике.
Методика использования робототехники в преподавании физики
При создании методики применения образовательной робототехники для преподавания учебных предметов, например, физики, необходимо в первую очередь определит цели ее использования.
Такими целями являются:
-
демонстрация обучающимся возможностей робототехники как одного из основных направлений для стремительного развития научно-технического прогресса;
-
повышение качества образовательной деятельности, что включает в себя углубление и расширение предметных знаний, совершенствование знаний в области прикладной физики, развитие у детей экспериментальных навыков и умений;
-
демонстрация роли физики в проектировании и применении современной техники;
-
развитие у обучающихся мотивации для изучения предмета;
-
повышение качества профильной и предпрофильной подготовки обучающихся и их ориентирование на профессии инженерно-технического профиля.
При преподавании физики можно выделить следующие направления применения роботов:
-
Робот как объект изучения. В данном случае изучаются физические принципы функционирования различных датчиков, двигателей и других элементов конструктора.
-
Робот как средство для проведения физического эксперимента, что предполагает комплексное применение двигателей, датчиков, систем оповещения, робототехнического конструктора в демонстрационном и лабораторном эксперименте.
-
Робот – средство измерения в традиционном эксперименте. Для этого применяются датчики из базового конструктора и дополнительные виды датчиков (Vernier, HiTechnic и др.).
-
Робот – средство учебного моделирования и конструирования.
Кроме того, образовательная робототехника может активно применяться в проектно-исследовательской и конструкторской работе обучающихся:
-
одновременное использование роботов с другими системами;
-
разработка новой модели робота;
-
доработка уже имеющейся модели робота.
Применение элементов робототехники на уроках обладает следующими преимуществами:
-
обработка результатов измерения физических величин может проводиться в автоматическом режиме;
-
снижение вероятности появления ошибок при измерениях;
-
постоянное отслеживание значения физической величины в ходе эксперимента в течение определенного промежутка времени и с установленной частотой снятия показаний датчика от единичного измерения за все время эксперимента;
-
построенный в ходе эксперимента график и инструменты для его исследования предоставляют дополнительные возможности для проведения анализа закономерной физического процесса, включая:
-
вывод значений различных интервалов измерения величины за конкретный отрезок времени;
-
вывод численных данных для любой точки графика;
-
аппроксимация графика;
-
определение среднего значения величины за определенный промежуток времени;
-
выведение на координатную плоскость нескольких графиков, которые были получены в ходе проведения других аналогичных экспериментов;
-
возможность выведения данных эксперимента на экран в ходе всего эксперимента. Данные выводятся в виде численных значений, таблиц значений и графиков функций, числовой шкалы с указателем.
Однако кроме положительных моментов применения образовательной робототехники в школьном эксперименте можно выделить и некоторые недостатки:
-
на создание экспериментальной установки с включением в нее робота требуется выделение дополнительного времени, так как предполагается сборка и программирование робота;
-
необходимость создания банка программ, которые в последующем будут применяться на различных установках;
-
возможность инструментальной погрешности датчиков, что также требует учета при организации эксперимента.
При проведении лабораторных работ, предполагающих применение роботов, можно выбрать различный уровень сложности заданий. Для определения данного уровня используются следующие показатели:
- Степень участия обучающихся в процессе сборки и настройки автоматизированного эксперимента:
-
самостоятельная сборка и наладка установки, проведение программной настройки датчиков, разработка программ для обработки полученных результатов;
-
работа на готовой установке.
-
Уровень дидактической поддержки учебной работы обучающихся:
-
выполнение проекта по заранее разработанной инструкции;
-
выполнение проекта по инструкции с использованием конструктивных схем по сборке;
-
выполнение проекта по инструкции, но уже с указаниями по программированию робота;
-
комбинированный вариант, что предполагает одновременное выполнение нескольких пунктов.
Для наглядности далее приводится несколько примеров использования робототехники на уроках физики.
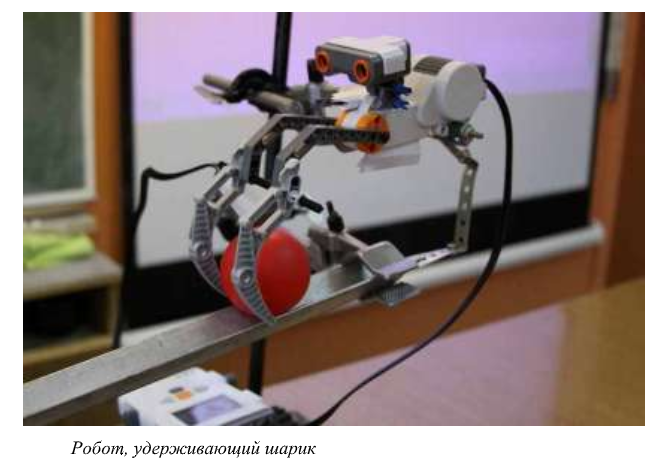
Пример 1. Лабораторная установка по определению ускорения
В состав конструкции лабораторной работы, которая используется для определения ускорения, входят:
-
наклонный желоб, который крепится с помощью штатива;
-
датчики света, закрепляемые вверху и внизу желоба;
-
шарик из набора Mindstorms;
-
пусковое устройство, которое отвечает за запуск шарика по сигналу, передаваемого с микропроцессорного модуля NXT;
-
датчик расстояния, который фиксирует перемещение шарика.
Ход эксперимента:
-
после запуска шарика по наклонной плоскости срабатывает первый датчик света, что дает команду на включение секундомера в микропроцессорном модуле NXT;
-
при прокатывании шарика возле второго датчика он также срабатывает и подает соответствующий сигнал на секундомер и останавливает его;
-
результаты измерения выводятся на дисплей модуля NXT.
Одновременно осуществляется и измерение расстояния, которое проделал шарик, с помощью ультразвукового датчика. В данном случае датчик функционирует по принципу эхолота в ультразвуковом диапазоне и располагается на уровне стартовой позиции шарика. Для получения максимально точных данных на уровне нижнего датчика света размещается экран, который отражает ультразвук. Результат измерения также выводится на экран модуля NXT.
Программа для данной установки либо пишется самими обучающимися, либо учитель пользуется уже готовой программой, которая заранее помещается в банк данных.
При выполнении вычислений обработка данных может осуществляться как традиционным способом, так и с привлечением программных вариантов обработки результатов измерений. Для этого в программе заранее добавляется блок вычислений.
Включение программной обработки результатов может производиться различными способами:
-
обучающиеся самостоятельно вписывают формулу, предложенную учителем. Педагог при этом показывает часть программы, в которую следует вводить формулу, а также помогает сохранить и запустить программу;
-
формула записывается в программу после ее совместного обсуждения в классе.
В процессе эксперимента возможно создание различных комбинаций сочетания датчиков звука, света и касания:
- Нижний датчик света заменяется датчиком касания. Датчик касания устанавливается таким образом, чтобы шарик при ударе нажимал кнопку датчика. Также в программе изменяется тип датчика.
- Нижний датчик света заменяется датчиком звука, в результате чего остановка секундомера осуществляется после удара шарика о препятствие.
- Замена верхнего датчика света датчиком касания. Для удобства нажатия он разворачивается кнопкой вверх. В программе требуется выполнить настройку одновременного запуска шарика и секундомера.
- Замена верхнего датчика света датчиком звука. В программу вносится изменения, предполагающие одновременное включение шарика и секундомера при срабатывании датчика звука.
- Замена обоих датчиков света датчиками касания и звука в любом варианте их расположения.
Пример 2. Демонстрация передачи вращательного движения посредством магнитного поля
Демонстрационная модель включает в себя:
-
две магнитные шестеренки, одна из которых передает вращение другой. На магнитной шестеренке магниты крепятся таким образом, что с внешней стороны диска вдоль всей окружности обеспечено чередование северных и южных магнитных полюсов. Когда две шестеренки сближаются, обеспечивается магнитное зацепление;
-
электродвигатель, на вал которого крепится одна из шестеренок, а вторая свободно вращается на оси.
Регулирование расстояния между шестеренками обеспечивается программным методом посредством блока NXT. Перемещение одной шестеренки в сторону другой может происходить за счет отдельного электродвигателя. Электродвигатель обеспечивает подачу шестеренки при срабатывании какого-либо датчика.
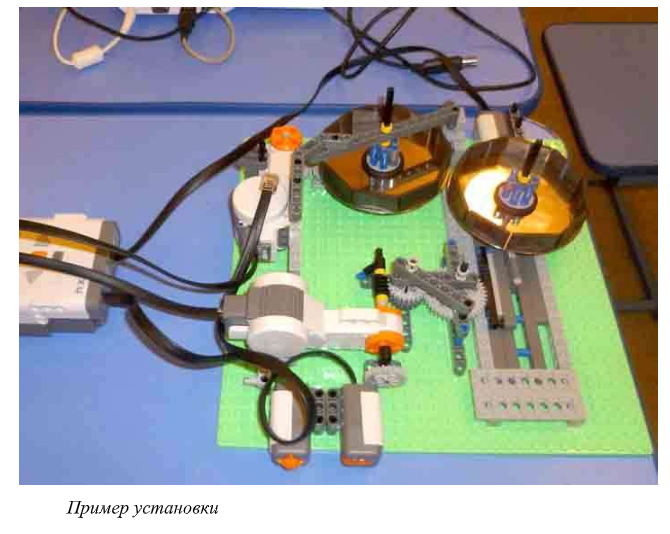
Для демонстрации дополнительных возможностей магнитного взаимодействия может использоваться более сложная установка (представлена на рисунке).

Особенности данной установки являются:
-
Вал ведомой шестеренки закрепляется в магнитных подшипниках, в результате чего его вращение осуществляется в состоянии магнитной левитации. Применение данного типа подшипников позволяет продемонстрировать современный принцип использования в технике электромагнитного поля. Вал достаточно легко извлечь из конструкции через верх, что существенно упрощает процесса сборки/разборки конструкции.
-
Применение датчика для изменения скорости вращения ведущей шестеренки. В конкретном примере используется датчик расстояния. Для его срабатывания возле сенсоров можно просто провести рукой. Самая простая программа позволяет задавать две скорости. Если же ее усложнить, что количество скоростей может быть уже любым, а также можно задать ускорение вращения.
-
Установка возле ведомой шестеренки датчика света, который нужен для определения частоты ее вращения. Боковая поверхность диска шестеренки окрашивается в контрастные черно-белые сектора, благодаря чему создается разная освещенность возле датчика. В примере на диске предусмотрено по 4 белых и 4 черных сектора. Датчик срабатывает во время вращения (измерение черного цвета на белый), одновременно блок NXT производит звуковые сигналы, благодаря которым удается вычислить частоту вращения.
В установку дополнительно можно подключать светодиод, который позволяет дублировать звуковые сигналы световыми сигналами либо же световой сигнал появляется при полном обороте шестеренки.
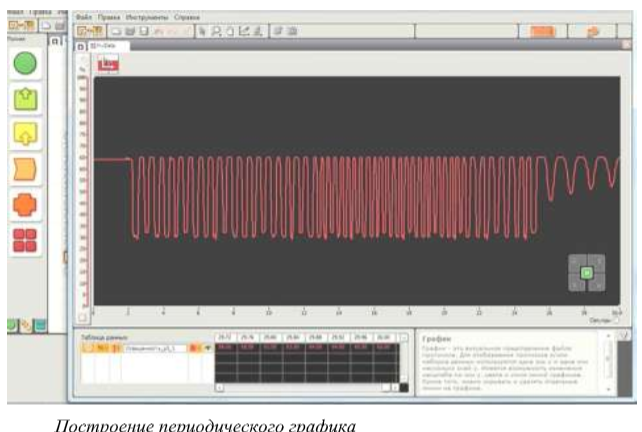
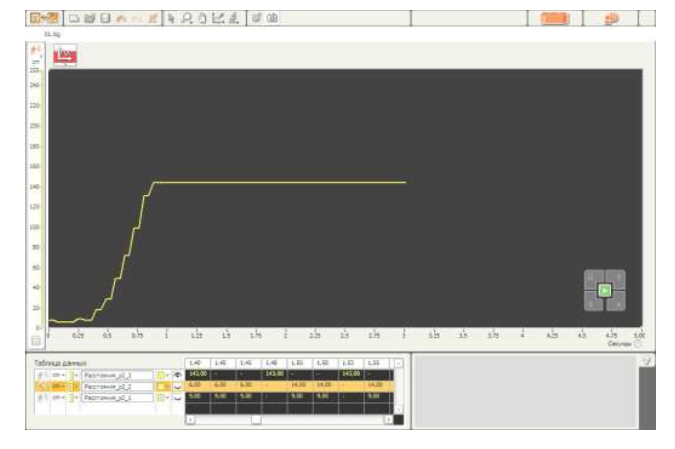
Еще один вариант фиксации результатов измерения – построение графика зависимости показаний датчика от времени. В данном случае при обеспечении равномерного вращения шестеренки будет построен периодический график, который позволяет достаточно легко определить частоту вращения шестеренки.
Для того чтобы продемонстрировать магнитное взаимодействие, можно воспользоваться и более простой конструкцией.
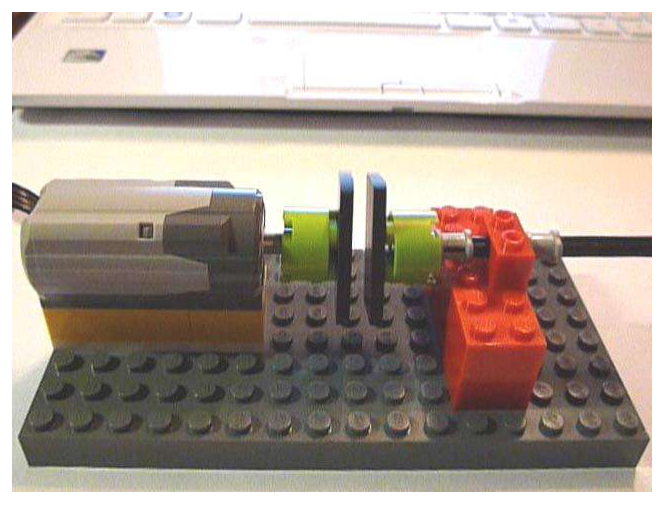
В данной модели применяются два магнита, оборудованными чередующимися линейными полюсами, один из магнитов крепится на ось электродвигателя. В модели также можно использовать и простые магниты подковообразного типа.
Сборка модели осуществляется из деталей конструктора LEGO WeDo, применяемого для обучения робототехнике учеников начальной школы.
Пример 3. Лабораторная установка по определению ускорения свободного падения
Данная лабораторная установка используется для определения ускорения свободного падения. Она отличается простотой конструкции и включает в себя блок NXT, а также датчик расстояния.
Для того чтобы определить время падения и пройденное расстояние, применяется стандартная функция построения графика на языке NXT-G. Для проведения данной работы не потребуется составлять программу, так как все необходимые данные получают из графика.
Крепление датчика расстояния производится на штативе таким образом, чтобы была обеспечена возможность удобно измерять расстояние от датчика до падающего предмета.
В качестве падающего предмета удобнее всего использовать кусок фанеры формата А4-А5. Для данного эксперимента шарик не подходит, так как от него в обратном направлении ультразвук практически не отражается.
Применение различных вариантов сборки и настройки лабораторной установки позволяет познакомить обучающихся с принципом модульности современного оборудования, алгоритмами сборки и разборки технических конструкций, проведением их ремонта.
Микророботы
По мнению польского фантаста Станислава Лема, даже крошечная крупинка может принести пользу, если у нее будет толика разума. Эта мысль была высказана в повести «Непобедимый», которая была опубликована в 1964 году. Но автор считал, что до воплощения его идеи в реальность пройдет еще много лет.
В науке понятие умной пыли (Smartdust) появилось благодаря американскому исследователю Кристоферу Листеру из Университета Калифорнии в 2001 году. Он руководствовался такими соображениями. В Национальной лаборатории Сандиа уже в 1990-х годах была создана модель автономного робота MARV (Miniature Autonomous Robotic Vehicle), объем которого равнялся 1 кубическому дюйму.
2000 год ознаменовался его уменьшением более чем в 4 раза. В столь миниатюрной машине были установлены процессор на 8 Кбайт, температурный датчик, химический сенсор, видеокамера и микрофон. Предполагалось, что затем MARV будет оборудован системой беспроводной связи с целью последующего объединения микророботов для совместного решения задач, при этом управление принадлежало центральному компьютеру.
Существует закон Мура, которые гласит о том, что совершенствование электронных чипов приводит к их уменьшению за каждые 18 месяцев в два раза. Соответственно, есть вероятность наступления периода, когда микроробот окажется размером с пылинку.
Разработчики считают, что преимущественно такие роботы будут использоваться в военной сфере. Например, беспилотным летательным аппаратом может рассыпаться с воздуха какое-то количество «умной пыли» на территории противника. С помощью таких невидимых разведчиков можно будет получать данные обо всех танках, бронемашинах и даже одиночных солдатах, которые проходили рядом с точным указанием временных и пространственных координат.
Благодаря использованию такой пыли можно даже заниматься уничтожением боевой техники противника. Американские военные предполагают, что облаком пыли может быть окружен танк, затем она проникнет внутрь техники, а по сигналу пыль взорвется.
Профессор Пралаб Датта и его коллеги из Мичиганского университета в Энн Арбор (США) считают, что умная пыль может активно использоваться и при решении исключительно мирных задач. Добавление ее в краску для покраски стен зданий, фюзеляжа самолета либо фермы моста поможет передавать специалистам данные о техническом состоянии объекта. Группой Датты уже проводится разработка первых прототипов таких микроустройств, которые называются Michigan Micro Motes.
Объем каждого чипа составляет 1 кубический миллиметр. В нем установлены датчики температуры, движения и иных свойств окружающего мира. Передача информации осуществляется радиоволновым методом.
Такую «умную пыль» назвали мичиганскими микропылинками. Они умеют определять внутри жилого помещения угарный газ в опасной концентрации.
Актуально использование компьютерных микродатчиков в медицине. Их можно будет имплантировать во внутренние органы пациентов для того, чтобы «мичиганские микропылинки» в формате онлайн сообщали о состоянии человека.
По мнению Джошуа Смит, руководителя Лаборатории сенсорных систем при Вашингтонском университете в Сиэтле, «покрыть все вокруг крошечными датчиками - весьма заманчивая идея, однако пытаясь реализовать ее, многие мои коллеги заходили в тупик перед проблемой: «А как обеспечить энергией для работы такие крупинки?».
Смит предполагает, что единственным выходом является обеспечить работу «пылинок» за счет энергии, которая добывается из окружающей среды. Как вариант – использование крошечных солнечных панелей либо термоэлектрогенераторов, которые предназначены для преобразования тепла в ток.
Джошуа Смит занимался проектом микрокомпьютеров-платформ беспроводного распознавания и восприятия (WISP). Такие устройства более солидные по размерам, а передача данных организована на основе системы радиочастотной идентификации, которая аналогична встроенной в кредитные карты нового поколения системе. Как и Micro Motes, WISP не испытывают нужды в батарейках, так как они функционируют за счет остатков энергии, к примеру, сигналов рядом располагающихся телебашен.
В число проблем входит и обеспечение возможности одновременного управления множеством микромеханизмов, которая решается зарубежными и отечественными специалистами. Игорь Каляев, доктор технических наук из НИИ многопроцессорных вычислительных систем при Таганрогском государственном радиотехническом институте, считает, что такая задача по силам только мощному сверхкомпьютеру, который будет заниматься отслеживанием каждого робота и передачей ему инструкций. Сложность заключается в необходимости огромных временных затрат, а также низком уровне безопасности ввиду возможности выхода управляющего центра из строя. Намного легче предоставить возможность самостоятельного принятия решений каждым роботом с координацией своих действий с соседями, так думает ученый.
Таганрогскими исследователями была построена математическая модель, с помощью которой создается представление об управлении облаками микророботов, где происходит их одновременное движение к разным целям. Российские ученые придумали такой алгоритм действий. На первом этапе роботами создается целостное облако, которому сообщаются координаты целей. У каждого робота есть свои координаты и координаты целей, на основании которых им принимается решение по выбору ближайшей цели и необходимости движения к ней. Он узнает количество роботов, которые уже начали движение к цели. Если этого числа достаточно, то робот начнет поиск новой цели либо продолжит нахождение в резерве. В противном случае будет принято решение об атаке, о чем будет сообщено соседям.
В результате происходит быстрый распад роботов на фрагменты-кластеры с их перемещением к выбранным целям. На компьютерном моделировании была продемонстрирована эффективность предложенного подхода. А за счет простоты алгоритма принятия решений микророботами его воплощение в электронных мозгах не вызывает сложностей.
Преимуществом является и гибкость процедуры управление, в процессе которой происходит быстрый учет потерь микророботов, изменений в поведении цели. Основная проблема заключается в обеспечении связи микропылинок между собой и центром управления вследствие огромных энергозатрат.
«Умными пылинками» может выполняться 100 000 операций на собственном центральном процессоре при использовании только одной единицы энергии. Но с помощью этой единицы энергии будет осуществлена передача во внешний мир лишь одного бита данных.
Предположительно, выход из ситуации был найден доктором Джоном Баркером, профессором Центра исследований в области наноэлектроники в Глазго. Он считает, что использование беспроводных сетей из таких микроустройств радиусом в 1 мм поможет в формировании кластеров, о которых шла речь выше. Тогда передача информации будет организована по цепочке, от одной микропылинки к другой с минимальными затратами.
«Мы убедились в том, что большинство частиц могут «разговаривать»
только с ближайшими соседями, но когда их много, они могут общаться на
значительно больших расстояниях, — рассказал ученый. — В ходе моделирования мы добились объединения 50 устройств в единый рой – и сумели это сделать, несмотря на сильный ветер».
Подача электрического заряда на пылинку направлена и на решение проблемы передвижения. Когда полимерная оболочка такого устройства будет «сморщена» при помощи микрозаряда, пылинка поднимется выше, а если она будет расплющена, то микропылинка опустится вниз.
Предполагается, что в будущем тысячи дешевых беспроводных сенсоров, которые будут располагаться в разных местах, будут самостоятельно объединяться в сети. Их работа будет организована от встроенных источников питания в течение нескольких лет.
В настоящее время состав сенсорных сетей может включать только несколько сотен пылинок. Устройства являются дорогостоящими, а работать они могут только несколько дней.
Первые полевые испытания сенсорных сетей на принципе «умной пыли» были организованы в Афганистане, где они использовались американскими военными для отслеживания передвижений боевой техники.
На острове Дикой утки в штате Мэн организована работа другой сети. Ее цель – изучение миграции буревестников. Еще одна сеть работает в составе системы симулятора землетрясений в Беркли.
Хотя некоторые эксперты выражают озабоченность такими успехами в сфере микроэлектроники, так как есть вероятность выхода микропесчинок из строя. А последствия этого могут быть непредсказуемыми… Поэтому сейчас требуется анализировать, как предотвратить вероятность такого сценария. Однако прогресс не может быть остановлен, а значит, идея Станислава Лема становится реальностью.
Список литературы:
-
Абрамов Э.Н. Портфель профессиональных достижений учителя. //Физкультура в школе. -2007. -№3. -С.77.
-
Болотина Г.К. Научно-методическое портфолио педагога. //Методист. -2006. -№9. -С.57.
-
Голуб Г.Б., Чуракова О.В. Портфолио в системе педагогической диагностики. // Школьные технологии. -2005. -№2. -С.189.
-
Горелова Т.И. Портфолио – альтернативный способ оценивания результатов обучения. // Управление начальной школой. -2009. -№6. -С.17.
-
Загвоздкин В.К. Роль портфолио в учебном процессе. Некоторые психолого-педагогические аспекты. (зарубежные источники). // Психологическая наука и образование. -2004. -№4. -С.5.
-
Загвоздкин В.К. Портфель индивидуальных учебных достижений – нечто большее, чем просто альтернативный способ оценки. // Школьные технологии. -2004. -№3. -С.179.
-
Захарченко Е.Ю. Структура портфолио учителя. // Практика административной работы в школе. -2006. -№8. -С.29.
-
Зеленко Н.В., Могилевская А.Г. Портфолио будущего педагога. // Стандарты и мониторинг в образовании. -2009. -№1. -С.61.
-
Коллекция достижений. Рекомендации по построению различных моделей портфолио. // Учительская газета. -2004. -№15-16. -С.15.
-
Копылова С.А. Портфолио как средство мониторинга профессионального развития педагога. // Практика административной работы в школе. -2006. -№8. -С.31.
-
Крепких О.В. Портфолио как инструмент самоанализа. // Управление школой. -2007. -№8. -С.31.
-
Михайловский О.С. Портфолио учителя. Обобщение и систематизация педагогических достижений. // Образование в современной школе. -2006. -№9. -С.19.
-
Новикова Т. Оценивание с помощью портфолио. // Народное образование. -2006. -№7. -С.137.
-
Новикова Т. Папка индивидуальных достижений «Портфолио»: федеральные рекомендации и местный опыт. - Директор школы. - 2004. -№8. -С.13.
-
Новикова Т. Портфолио в профильной школе. // Оценка качества образования. -2008. -№3. -С.42-50.
-
Новикова Т., Прутченков А., Пинская М. Портфолио в российской школе. // Народное образование. -2005. -№1. -С.84.
-
Новикова Т.Г., Прутченков А.С. Предупреждение ошибок при использовании портфолио. // Профильная школа. -2006. -№3. -С.27.
-
Никитина С.И. Портфолио по информатике. // Информатика и образование. -2008. -№6. -С.29.
-
Петренко А. Мониторинг, портфолио и электронные пособия. // Управление школой. -2008. -№14. -С.23-26.
-
Пинская М.А. Место портфолио в современном образовании. // Оценка качества образования. -2008. -№2. -С.56.
-
Пинская М.А. Портфолио учителя как инструмент профессионального развития и оценки профессиональных достижений. // Оценка качества образования. -2008. -№4. -С.52.
-
Положение о портфолио учителя. // Юридический журнал. -2008. -№2. -С.8.
-
Пономарёва Е.А. Педагогический совет на тему «Портфолио образовательного учреждения». // Методист. -2006. -№2. -С.26.
-
Портфолио: за и против. //Педсовет. -2004. -№69. -19 октября. -С.6.
-
Портфолио педагога. // Справочник руководителя ОУ. -2004. -№6. -С.43.
-
Пронина Л. Портфолио учителя. // Воспитание школьника. -2009. -№4. -С.15.
-
Прутченков А.С. Типичные ошибки и затруднения при формировании портфолио в практике российской школы. // Методист. -2004. -№6. -С.33.
-
Сизова Л.М. Использование портфолио в педагогической деятельности. //Управление ДОУ. -2007. -№7. -С.96.
-
Склюев В. Портфель достижений педагога. // ИКТ. -2008. -№5. -С.4-5.
-
Федотова Е., Новикова Т.Г., Прутченков А.С. Портфолио как система альтернативного оценивания в практике зарубежной школы. // Школьные технологии. -2005. -№3. -С.171.
-
Федотова Е., Новикова Т.Г., Прутченков А.С. Зарубежный опыт использования портфолио. // Методист. -2005. -№5. -С.27.
-
Функциональные обязанности участников образовательного процесса при внедрении в практику портфолио как метода оценивания. // Практика административной работы. -2005. -№5. -С.20.
-
Хацкевич Е. Портфолио на педсовете. Деловая игра. // Школьный психолог. -2006. -№18. -С.33-34.
© ООО «Знанио»
С вами с 2009 года.
![]()