В своей работе Ваня рассказывает как можно связать домашние тапочки. Для этого нужен крючок и толстые нитки. Предлагает схему
вывязывания узора. В проекте много фотографий.Тапки можно сделать из бросового материала.Ваня принёс много пар различных тапочек,
которые он связал для близких.
Государственное бюджетное общеобразовательное учреждение Самарской области
средняя общеобразовательная школа №6 города Жигулевска
городского округа Жигулевск Самарской области
Исследовательская работа
на тему:
«КАК ДВИГАЮТСЯ РОБОТЫ»
Работу выполнил:
ученик 2 «В» класса
Сорокин Дима
Руководитель:
Копытцева Людмила Вячеславна
учитель начальных классов
г.о. Жигулевск
Жигулевск2017
Содержание
Введение……………………………………………………………………………………….
Часть 1. Обзор литературы…………………………………………………………………..
1.1. Колесные движители…………………………………………………………………….
1.2. Гусеничные движители………………………………………………………………….
1.3. Шагающие движители…………………………………………………………………..
1.4. Необычные движители………………………………………………………………….
Часть 2. Экспериментальная проверка……………………………………………………..
3
4
4
4
5
5
6
2.1. Материалы и методы исследования…………………………………………………… 6
2.2. Описание эксперимента………………………………………………………………… 6
2.3. Результаты эксперимента……………………………………………………………….
Заключение и выводы………………………………………………………………………..
Список литературы…………………………………………………………………………..
Приложение 1. Этапы создания экспериментального робота
7
7
7
2Введение
Когда я вырасту, я мечтаю стать изобретателем, конструировать роботов и другие
сложные механизмы. Для этого нужно будет многое узнать и многому научиться.
Мы с папой начали проект по созданию робота «Титан». Это будет очень сложный и
большой робот. Мы будем создавать его шаг за шагом – от простого к сложному. Для этого
нужно будет провести много экспериментов. В этом проекте мы описали первый из них.
При создании робота важно выбрать способ его передвижения, изучить достоинства и
недостатки.
Цель исследования: изучить способы управления вибрационным движителем.
Задачи:
1. Познакомится с различными способами передвижения роботов.
2. Построить макет робота для проведения опыта с его управлением.
3. Провести эксперимент по управлению вибродвигателями.
4. Обдумать результаты и сделать выводы.
Предположение: с помощью двух вибродвигателей можно управлять направлением движения
робота.
3Часть 1. Обзор литературы
Сначала мы изучили различные способы передвижения роботов: на колесах, на гусеницах,
шагающие механизмы, а также необычные способы передвижения. Для своего исследования мы
выбрали один из необычных способов передвижения: на виброщетках.
1.1. Колесные движители
Самым распространенным способом передвижения являются колеса. Это самый древний
способ: колесо было изобретено уже несколько тысяч лет назад. Колесо позволяет развить
большую скорость, но для него нужна подготовленная поверхность – дорога. Иногда колесо
может двигаться и по бездорожью, но проходимость его не очень высокая. Колесо очень
надежно, поэтому его используют даже для передвижения по другим планетам – для луноходов
и марсоходов.
1.2. Гусеничные движители
Этот способ отличается высокой проходимостью. Поэтому его используют для различных
вездеходов, тракторов танков. Хотя на гусеницах нельзя развить высокую скорость, это лучший
способ для передвижения по бездорожью.
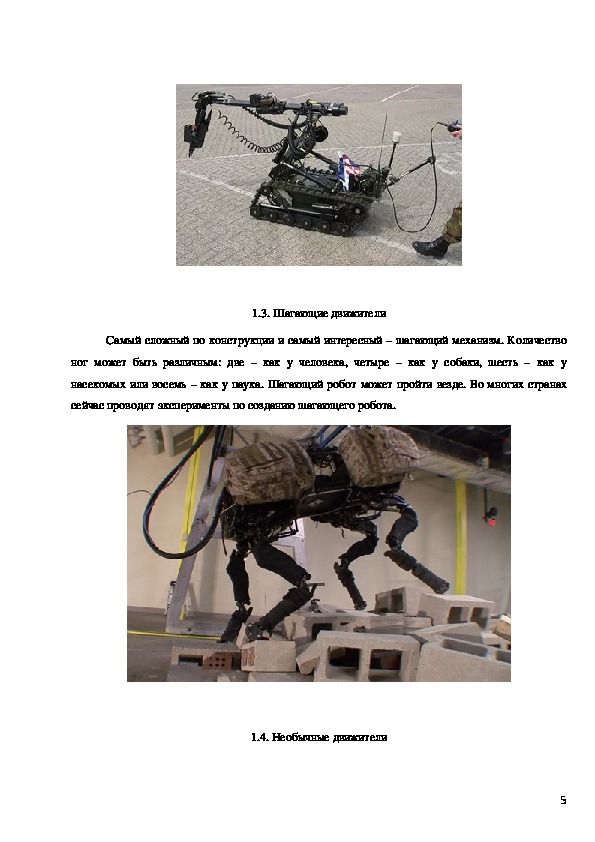
41.3. Шагающие движители
Самый сложный по конструкции и самый интересный – шагающий механизм. Количество
ног может быть различным: две – как у человека, четыре – как у собаки, шесть – как у
насекомых или восемь – как у паука. Шагающий робот может пройти везде. Во многих странах
сейчас проводят эксперименты по созданию шагающего робота.
1.4. Необычные движители
5Есть также необычные способы передвижения: на воздушной подушке, ползающие
роботы, прыгающие роботы и многие другие. Мы решили провести эксперимент с интересным
способом передвижения – с помощью вибрации.
6Часть 2. Экспериментальная проверка
2.1. Материалы и методы исследования
Для исследования применяли экспериментальный метод – постройка макета и проверка
на нем поставленных задач. Для постройки макета использовали электродетали и подручные
материалы.
2.2. Описание эксперимента
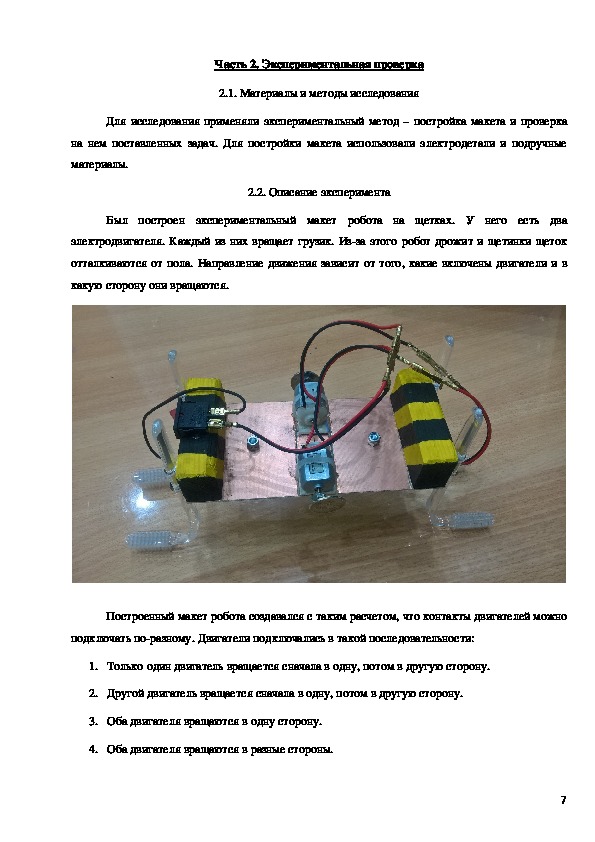
Был построен экспериментальный макет робота на щетках. У него есть два
электродвигателя. Каждый из них вращает грузик. Изза этого робот дрожит и щетинки щеток
отталкиваются от пола. Направление движения зависит от того, какие включены двигатели и в
какую сторону они вращаются.
Построенный макет робота создавался с таким расчетом, что контакты двигателей можно
подключать поразному. Двигатели подключались в такой последовательности:
1. Только один двигатель вращается сначала в одну, потом в другую сторону.
2. Другой двигатель вращается сначала в одну, потом в другую сторону.
3. Оба двигателя вращаются в одну сторону.
4. Оба двигателя вращаются в разные стороны.
72.3. Результаты эксперимента
В ходе эксперимента было выяснено следующее:
1. Если подключить только один двигатель, робот будет двигаться боком – влево или
вправо.
2. Если подключить два двигателя и они будут вращаться в одну сторону – робот поедет
вперед или назад.
3. Если два двигателя вращаются в разные стороны – робот будет поворачиваться.
Заключение и выводы
Вывод: таким движением можно управлять.
Полученный результат поможет нам улучшить конструкцию робота и сконструировать к
нему пульт управления.
Список литературы
1. Шпаковский В.О. Для тех, кто любит мастерить: Кн. Для учащихся 58 кл. сред. шк. – М.:
Просвещение, 1990. – 191 с.
2. Шпаковский В. По луне – на щетках // МоделистКонструктор – №3. – 1980 г. – с. 18.
3. Ганов Э. Вездеходвнутриход // МоделистКонструктор – №3. – 1980 г. – с.19.
4. Николаев И. Вместо гусениц шнек // МоделистКонструктор – №11. – 1981 г. – с.1316.
5. Планетоходы // МоделистКонструктор – №7. – 1980 г. – с.1920.
6. Петров П. Католет стартует в завтра // МоделистКонструктор – №7. – 1980 г. – с.2124.
7. Материалы сайта «Servodroid»: http://www.servodroid.ru
8. Материалы сайта «Robotics»: https://robotics.ua
8Приложение 1. Этапы создания экспериментального робота
9