Данное методическое пособие представляет последовательное пояснение к выполнению расчетно-графических задач по разделу «Теоретическая механика» по предмету «Техническая механика» для учащихся 2 курса специальности 190631 «Техническое обслуживание и ремонт автомобильного транспорта». Методическое пособие разработано в соответствии с рабочей программой по дисциплине, составленной на основе требований Государственного образовательного стандарта.Данное методическое пособие представляет последовательное пояснение к выполнению расчетно-графических работ по разделу «Теоретическая механика» для студентов отделения ПССЗ специальности 23.02.03 «Техническое обслуживание и ремонт автомобильного транспорта».
Государственное бюджетное профессиональное
образовательное учреждение
Воронежской области
«Воронежский государственный промышленно – технологический колледж»
(ГОБУ СПО ВО «ВГПТК»)
ТЕХНИЧЕСКАЯ МЕХАНИКА
Методические указания
к выполнению расчетнографических задач №1
по разделу « Теоретическая механика»
для учащихся 2 курса
специальности 23.02.03. «Техническое обслуживание и ремонт автомобильного
транспорта»
Составитель
преподаватель спецдисциплин
к.п.н. Наумов О. Е.Воронеж 2015
Данное методическое пособие представляет последовательное пояснение к
выполнению расчетнографических задач по разделу «Теоретическая механика» по
предмету «Техническая механика» для учащихся 2 курса специальности 190631
«Техническое обслуживание и ремонт автомобильного транспорта». Методическое
пособие разработано в соответствии с рабочей программой по дисциплине,
составленной на основе требований Государственного образовательного стандарта.
Рецензент: кандидат технических наук, доцент кафедры
«Строительной техники инженерной механики»
ФГБОУ ВПО ВО ВГАСУ
Никитин С.А
Методические указания одобрены на заседании предметноцикловой комиссии
дисциплин профессионального цикла специальности ТО и ремонт автомобильного
транспорта ГОБУ СПО ВО «ВГПТК»
Протокол № ______1______ от «_21_»_сентября_ 2015 г.
Председатель ПЦК О.Е. Наумов
2Печатается по решению методического совета ГОБУ СПО ВО «Воронежский
государственный промышленнотехнологического колледж»
Пояснительная записка.
механики». Перед
Данное методическое пособие представляет последовательное пояснение к
выполнению расчетнографических работ по разделу «Теоретическая механика» для
студентов отделения ПССЗ специальности 23.02.03 «Техническое обслуживание и
ремонт автомобильного транспорта». Методическое пособие разработано в
соответствии с рабочей программой по дисциплине, составленной на основе
требований Государственного стандарта. Пособие рассматривает все основные темы
раздела «Теоретической механики» входящих в курс «Технической механики», список
которых прилагается в первой части пособия.
Во второй части рассматриваются решения семи расчетнографических работ с
пояснениями, которые выполняются студентами при изучении данного раздела
курса «Технической
указывается
последовательность выполнения
работы, и темы после изучения, которых
необходимо приступать к решению.
В третьей части предлагаются условия задач расчетнографических работ,
соответствующие схемы и до 100 вариантов заданий для самостоятельного
практического решения.
Методическое пособие являются первой частью полного курса «Технической
механики» состоящего из «Теоретической механики».
описанием примера
I . ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Предмет «Техническая механика» состоит из двух разделов: теоретическая
механика, сопротивление материалов. Каждый раздел технической механики
необходимо изучать в порядке, предусмотренном программой. Ведение конспекта
обязательно. Только в этом случае можно получить прочные знания и навыки
расчетов по всем разделам курса технической механики и успешно выполнить
работы, и сдать экзамены.
Работать с учебником рекомендуется в такой последовательности:
1. Ознакомиться с содержанием данной темы по программе и по подобранному
учебнику. 2. Изучить материал темы. Если тема имеет большой объем, надо разбить
ее на отдельные части. Разобрать узловые вопросы темы, записать основные
определения, доказательства, правила и формулы, сопровождая выписки схемами и
рисунками. Выводы формул можно не записывать, следует только указывать, на
каком принципе этот вывод основан.
В целях закрепления учебного материала и приобретения навыков в пользовании
расчетными формулами, уравнениями законов и теорем необходимо разобрать
3примеры и задачи, помещенные в учебнике, и решить задачи из сборников задач по
соответствующему разделу.
Решение задачи делится на пункты. Каждый пункт должен иметь подзаголовок с
указанием, что и как определяется, по каким формулам или на основе каких
теорем, законов, правил, методов.
Разрешается выполнять работы на компьютере в математических программах
EXEL MahtCAD.
Раздел 1. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
(краткое содержание изучаемых тем)
Введение.
Содержание технической механики. Роль и значение механики в технике.
Материя и движение. Механическое движение. Равновесие. Теоретическая механика
и ее разделы: статика, кинематика, динамика.
Тема 1.1. Основные понятия и аксиомы статики. Материальная точка.
Абсолютно твердое тело. Сила; сила как вектор, способы измерения силы и ее
единицы;
Эквивалентные системы сил.
Равнодействующая сила. Силы внешние и внутренние. Основные задачи статики.
сила тяжести.
СТАТИКА
Система сил.
Первая аксиома статики (закон инерции). Вторая аксиома (условия
равновесия двух сил). Третья аксиома (принцип присоединения и исключения
уравновешенных сил). Перенос силы вдоль линии ее действия (сила — скользящий
вектор). Четвертая аксиома (правило параллелограмма). Пятая аксиома (закон
равенства действия и противодействия). Свободное и несвободное тело. Связи.
Реакции идеальных связей и определение их направлений.
Тема 1.2. Плоская система сходящихся сил. Система сходящихся сил.
Определение модуля и направления равнодействующей двух сил, приложенных в
одной точке. Разложение силы на две составляющие, приложенные в той же точке.
Сложение плоской системы сходящихся сил. Силовой многоугольник. Проекция
силы на ось; правило знаков. Проекции силы на две взаимно перпендикулярные оси.
Аналитическое определение равнодействующей плоской системы сходящихся сил
(метод проекций). Геометрическое условие равновесия плоской системы
сходящихся сил. Аналитические условия равновесия плоской системы сходящихся
сил (уравнения равновесия).
Стержневые системы с идеальными шарнирами,
нагруженные в шарнирах.
Тема 1.3. Пара сил. Пара сил. Вращающее действие пары сил на тело. Плечо
пары, момент пары, знак момента. Момент как вектор. Эквивалентность пар.
Возможность переноса пары в плоскости ее действия (момент пары — свободный
вектор). Сложение пар. Условие равновесия пар.
Тема 1.4. Плоская система произвольно расположенных сил. Вращающее
действие силы на тело. Момент сил относительно точки. Приведение силы к данному
4центру. Приведение плоской системы сил к данной точке, главный вектор и главный
момент плоской системы сил. Равнодействующая плоской системы сил. Теорема
Вариньона. Частные случаи приведения плоской системы сил. Равновесие плоской
системы сил. Условия равновесия. Уравнения равновесия произвольной плоской
системы сил (три вида). Уравнения равновесия плоской системы параллельных сил
(два вида). Рациональный выбор направления координатных осей и центра моментов
при решении задач.
Балочные системы. Классификация нагрузок: сосредоточенные силы,
сосредоточенные пары сил, распределенные нагрузки. Виды опор балочных систем,
опорные реакции, момент. Связи с трением. Отклонение направления реакции связи
от нормали к поверхности; сила трения, коэффициент трения. Контур трения.
Условия самоторможения.
Тема 1.5. Пространственная система сил. Параллелепипед сил. Проекции силы
на взаимно перпендикулярные координатные оси.
Равнодействующая
пространственной системы сходящихся сил. Равновесие пространственной системы
сходящихся сил. Момент силы относительно оси. Общий случай действия
пространственной системы. Понятие о главном векторе и главном моменте
пространственной системы. Шесть уравнений равновесия пространственной системы
параллельных сил (без выводов). Три уравнения равновесия пространственной
системы параллельных сил. Применение уравнений равновесия для различных
случаев пространственно нагруженных валов (в частности, редукторных).
Тема 1.6. Центр тяжести. Центр параллельных сил и его свойство. Формулы
для определения положения центра параллельных сил. Центр тяжести тела. Формула
для определения положения центра тяжести тела, составленного из тонких
однородных пластинок (площадей) и из тонких стержней (линий).
Положение центра тяжести тела, имеющего плоскость или ось симметрии.
Положение центров тяжести простых геометрических фигур и линий;
прямоугольника, треугольника, дуги, окружности (без вывода), кругового сектора.
Определение положения центров тяжести тонких пластинок и сечений, составленных
из простых геометрических фигур и из стандартных профилей проката. Статический
момент сечения. Условие равновесия твердого тела, имеющего неподвижную точку
или ось вращения. Устойчивое, неустойчивое, безразличное равновесие. Условие
равновесия тела, имеющего опорную плоскость. Момент опрокидывания и момент
устойчивости. Коэффициент устойчивости.
КИНЕМАТИКА
Тема 1.7. Основные понятия кинематики. Кинематика как наука о
механическом движении, изучаемом с точки зрения геометрии. Покой и движение;
относительность этих понятий. Основные понятия кинематики: траектория, путь,
время, скорость и ускорение.
Тема 1.8. Кинематика точки. Способы задания движения точки. Уравнение
движения точки по заданной криволинейной траектории Средняя скорость и
скорость в данный момент. Ускорение полное, нормальное (центростремительное) и
касательное (тангенциальное). Виды движения точки в зависимости от ускорения.
Равномерное движение точки. Равнопеременное движение точки: уравнение
5движения, основные и вспомогательные формулы. Кинематические графики и связь
между ними.
Тема 1.9. Простейшие движения твердого тела. Поступательное движение
твердого тела и его свойства. Вращательное движение твердого тела вокруг
неподвижной оси. Угловое перемещение. Уравнение вращательного движения.
Средняя угловая скорость и угловая скорость в данный момент. Частота вращения.
Единицы угловой скорости и частоты вращения, связь между ними. Угловое
ускорение. Равномерное вращение.
Равнопеременное вращение: уравнение вращения, основные и вспомогательные
формулы. Линейные скорости и ускорения точек вращающегося тела. Выражение
скорости, нормального, касательного и полного ускорений точек вращающегося тела
через его угловую скорость и угловое ускорение.
Тема 1.10. Сложное движение точки. Переносное, относительное и абсолютное
движение точки. Теорема сложения скоростей.
Тема 1.11. Сложное движение твердого тела. Плоскопараллельное движение
тела. Разложение плоскопараллельного движения на поступательное и вращательное.
Определение абсолютной скорости любой точки тела. Мгновенный центр скоростей.
Основные способы определения мгновенного центра скоростей. Определение
абсолютной скорости любой точки тела с помощью мгновенного центра. Сложение
вращений вокруг параллельных и пересекающихся осей.
ДИНАМИКА
Тема 1.12. Основные понятия и аксиомы динамики. Предмет динамики;
понятие о двух основных задачах динамики. Первая аксиома — принцип инерции;
вторая аксиома — основной закон динамики точки. Масса материальной точки и ее
единицы; зависимость между массой и силой тяжести. Третья аксиома — закон
независимости действия сил. Четвертая аксиома — закон равенства действия и
противодействия.
Тема 1.13. Движение материальной точки. Метод кинетостатики. Понятие о
свободной и несвободной точке. Понятие о силе инерции. Сила инерции при
прямолинейном и криволинейном движениях материальной точки. Принцип
Даламбера; метод кинетостатики.
Тема 1.14. Работа и мощность. Работа постоянной силы при прямолинейном
движении. Единицы работы. Работа равнодействующей силы. Понятие о работе
переменной силы. Работа силы тяжести. Мощность, единицы мощности. Понятие о
механическом коэффициенте полезного действия (КПД). Работа и мощность при
вращательном движении тела, окружная сила, вращающий момент. Зависимость вра
щающего момента от угловой скорости (частоты вращения) и передаваемой
мощности.
Работа при качении тела по негладкой поверхности; коэффициент трения
качения, его размерность.
Тема 1.15. Общие теоремы динамики. Импульс силы, количество движения.
Теоремы о количестве движения для точки. Кинетическая энергия точки. Теорема о
кинетической энергии для точки. Система материальных точек. Внешние и
внутренние силы системы. Основное уравнение динамики для вращательного
движения твердого тела. Момент инерции тела.
6Кинетическая энергия тела при поступательном,
вращательном и
плоскопараллельном движениях. Теорема кинетической энергии для системы.
1. Аркуша А И. Техническая механика. М., 2014.
СПИСОК ЛИТЕРАТУРЫ
2 .В.П.Олофинская Техническая механика (Курс лекций). М., ФОРУМ» , 2014.
3 .Л.И.Вереина , М.М.Краснов Техническая механика. М., «Академия ». 2013.
4 .Л.И.Вереина , Техническая механика. М., « Академия ». 2005.
II. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ РАСЧЕТНО –
ГРАФИЧЕСКИХ ЗАДАЧ
(№ 1; №2; №3; №4; №5)
В рекомендованных учебниках [1], [2], а также в руководствах [4] и [5] учащиеся
найдут достаточное число примеров задач подобных тем, которые включены в
расчетнографические работы. Поэтому ниже даны лишь необходимые краткие
методические указания к решению задач.
Первую расчетнографическую задачу (задачи 1 — 10) следует решить после
изучения тем 1.1 и 1.2. Во всех задачах рассматривается равновесие плоской системы
сходящихся сил и требуется определить реакции двух шарнирно соединенных между
собой стержней, удерживающих два груза. Таким образом, к шарниру В в каждой
задаче приложены четыре силы, из которых две неизвестны. Можно избрать три
способа решения: аналитический, графический и геометрический. Для данного типа
задач целесообразно использовать аналитический способ решения.
Последовательность решения задачи о системе плоских сходящихся сил:
1. Выбрать тело (точку), равновесие которого следует рассматривать
2. Освободить тело (шарнир В) от связей и изобразить действующие на него
активные силы и реакции отброшенных связей.
Причем
реакции стержней следует направить от шарнира В, так как принято
предполагать, что стержни растянуты.
3. Выбрать оси координат и составить уравнения равновесия, используя условия
плоскости
. Выбирая оси координат, следует учитывать, что
равновесия системы сходящихся сил
iXF
полученные уравнения будут решаться проще, если одну из осей направить
перпендикулярно одной из неизвестных сил.
на
;
0
iYF
0
4. Определить реакции стержней из решения указанной системы
уравнений.
5. Проверить правильность полученных результатов, решив уравнения равновесия
относительно заново выбранных координат х и у.
Пример расчетнографической задчи № 1.
Определить реакции стержней, удерживающих грузы
F1 = 70 кН и F2 = 100 кН (рис. 1,а). Массой стержней пренебречь.
Дано: F1 = 70 кН и F2 = 100 кН
7Найти: реакции в стержнях R1 ;R2
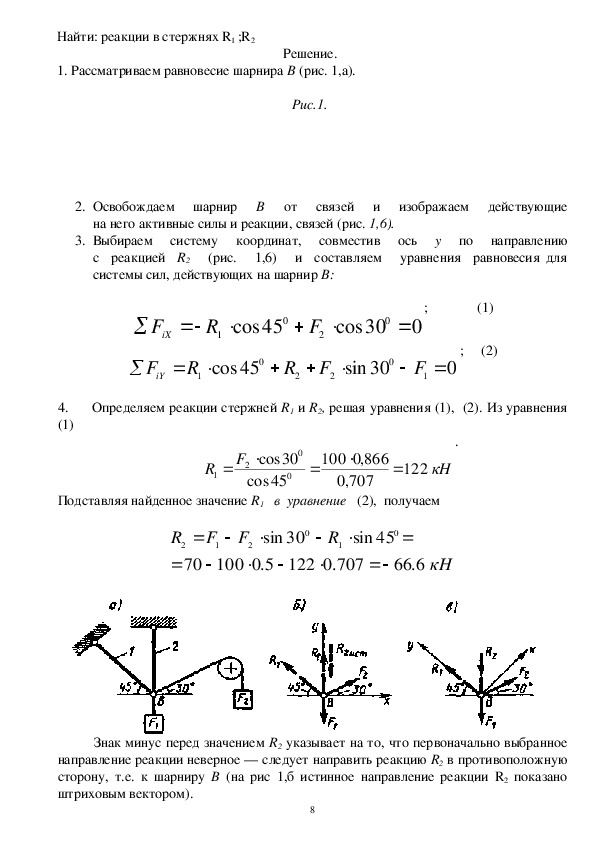
Решение.
1. Рассматриваем равновесие шарнира В (рис. 1,а).
Рис.1.
2. Освобождаем шарнир
В от связей и изображаем действующие
на него активные силы и реакции, связей (рис. 1,6).
3. Выбираем систему координат,
по направлению
с реакцией R2 (рис. 1,6) и составляем уравнения равновесия для
системы сил, действующих на шарнир В:
совместив ось
у
FiX
R
1
cos
45
0
F
2
cos
30
0
0
; (1)
FiY
R
1
cos
45
0
R
2
F
2
sin
30
0
0
F
1
; (2)
Определяем реакции стержней R1 и R2, решая уравнения (1), (2). Из уравнения
4.
(1)
R
1
0
30
cos
F
2
0
cos
45
866
100
,0
707
,0
.
122
кН
Подставляя найденное значение R1 в уравнение (2), получаем
R
2
70
FF
sin
1
2
5.0
100
0
R
sin
30
1
122
707
.0
45
6.66
0
кН
Знак минус перед значением R2 указывает на то, что первоначально выбранное
направление реакции неверное — следует направить реакцию R2 в противоположную
сторону, т.е. к шарниру В (на рис 1,б истинное направление реакции R2 показано
штриховым вектором).
85.
Проверяем правильность полученных результатов, выбрав новое
расположение осей координат х и у (рис. I, а). Относительно этих осей составляем
уравнения равновесия:
Из уравнения (3) находим
FiX
R
2
cos
45
0
F
2
cos
15
0
F
1
cos
45
0
0
; (3)
FR
1
1
FiY
cos
45
0
R
2
cos
45
0
F
2
cos
75
0
0
; (4)
из уравнения (3) находим
F
2
cos
R
2
0
15
F
1
45
cos
0
cos
45
0
100
,0
965
,0
70
707
,0
707
6,66
кН
Подставляя найденное значение R2 в уравнение (4), получаем
R
F
1
1
45
707,06.66
cos
707,070
cos
F
2
100
,0
75
258
cos
R
2
122
0
45
0
0
кН
Значения реакций R1 и R2, полученные при решении уравнений (1) и (2), совпадают по
величине и направлению со значениями, найденными из уравнений (3) и (4),
следовательно, задача решена правильно.
Вторую расчетнографическую задачу о системе плоских произвольных сил
(балочные системы) следует решать после изучения тем 1.3 и 1.4. Во всех задачах
требуется определить реакции опор балок. Учащимся необходимо приобрести
навыки определения реакций опор, так как с этого начинается решение многих задач
по сопротивлению материалов и деталям машин
Последовательность решения задачи:
1. Изобразить балку вместе с нагрузками.
2. Выбрать расположение координатных осей, совместив ось х с балкой, а ось у
направив перпендикулярно оси х.
3. Произвести необходимые преобразования заданных активных сил: силу,
наклоненную к оси балки под углом а, заменить двумя взаимно
перпендикулярными составляющими, а равномерно
распределенную нагрузку — ее равнодействующей, приложенной в середине
участка распределения нагрузки.
4.
5.
Освободить балку от опор, заменив их действие реакциями
опор, направленными вдоль выбранных осей координат.
Составить уравнения равновесия статики для произвольной
9плоской системы сил, таким образом, и в такой последовательности,
чтобы решением каждого из этих уравнений было определение одной
из неизвестных реакций опор.
Проверить правильность найденных опорных реакций по уравнению, которое
не было использовано для решения задачи.
6.
Пример расчетнографической задачи № 2
Определить реакцию двухопорной балки (рис. 2, а).
Рис.2
Дано: F = 20 кН ; M = 10кН∙м; q = 1кН/м ; α = 30о
Найти: реакции в опорах RAy ; RAx; RDy
1. Изобразим балку с действующими на нее нагрузками
(рис. 2, а).
Решение.
2.
3.
Изображаем оси координат х и у совместив ось х с осью балки .
Силу F заменяем ее составляющими
Fx = F∙cos = 20∙ cos 30 = 20∙ 0,866 = 17,32 кН
Fy = F∙sin= 20∙ 0,5 = 10 кН.
Равнодействующая Q = q•CD равномерно распределенной нагрузки приложена в
середине участка CD, в точке К (рис. 2,6).
4.
Освобождаем балку от опор, заменив их опорными реакциями
(рис. 2, в).
Q = q•CD =1∙2 = 2 кН
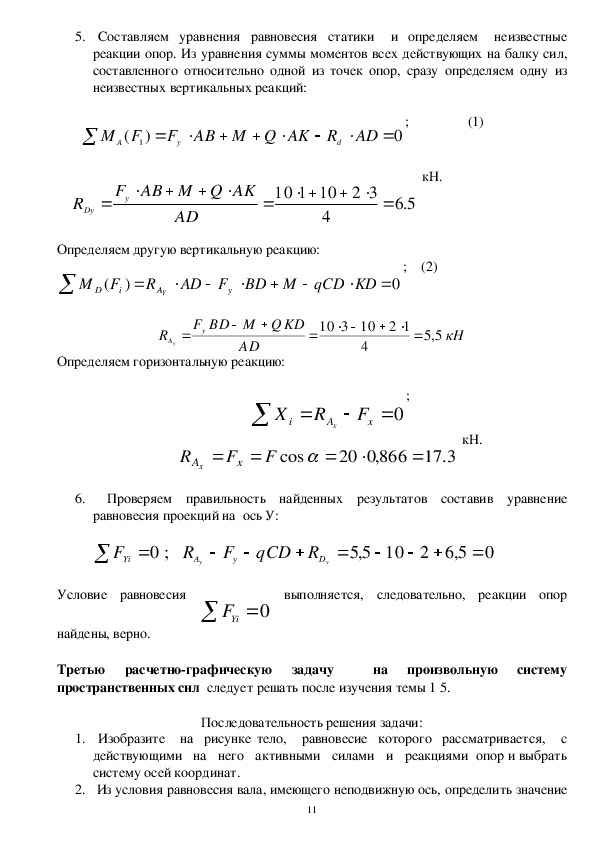
105.
Составляем уравнения равновесия статики и определяем неизвестные
реакции опор. Из уравнения суммы моментов всех действующих на балку сил,
составленного относительно одной из точек опор, сразу определяем одну из
неизвестных вертикальных реакций:
( 1
FM
A
)
F
AKQMAB
y
R
d
0
AD
; (1)
F
y
R
Dy
AKQMAB
AD
110
кН.
32
5.6
10
4
Определяем другую вертикальную реакцию:
FM
i
AD
BD
M
F
R
A
Y
(
)
D
y
qCD
; (2)
KD
0
BDF
y
R
Ay
KDQM
AD
3
10
12
10
4
5,5
кH
Определяем горизонтальную реакцию:
;
F
x
0
i
X
R
F
20
cos
A
x
R
Ax
F
x
866,0
кН.
3.17
6.
Проверяем правильность найденных результатов составив уравнение
равновесия проекций на ось У:
05,62
5,5
qCD
;0
10
F
R
F
R
Yi
D
y
A
y
y
Условие равновесия
0 YiF
найдены, верно.
выполняется, следовательно, реакции опор
Третью расчетнографическую задачу
пространственных сил следует решать после изучения темы 1 5.
на произвольную систему
Последовательность решения задачи:
1.
2.
Изобразите на рисунке тело, равновесие которого рассматривается, с
действующими на него активными силами и реакциями опор и выбрать
систему осей координат.
Из условия равновесия вала, имеющего неподвижную ось, определить значение
11силы F2, после чего вычислить значение силы Fr2.
Составить шесть уравнений равновесия.
3.
4.Решить
5. Проверить правильность решения задачи.
уравнения
и
определить
реакции
опор
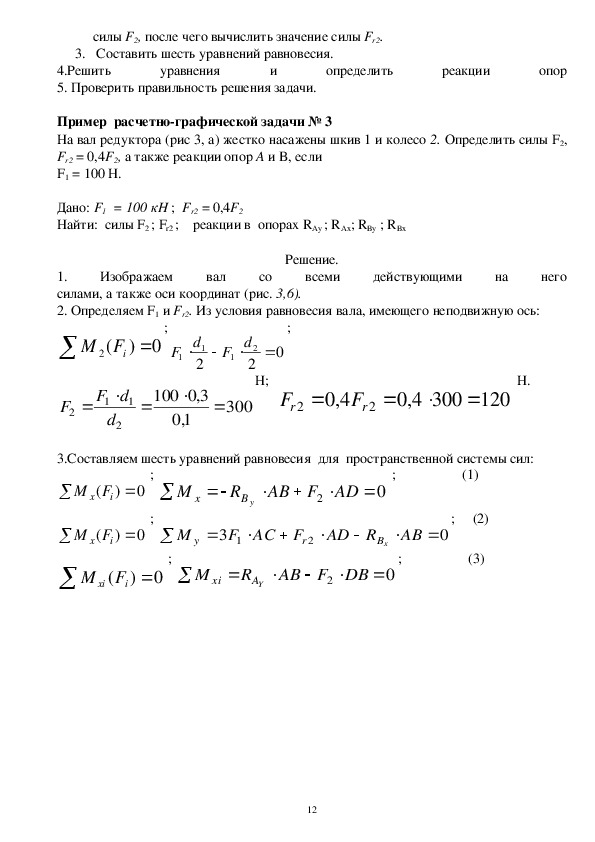
Пример расчетнографической задачи № 3
На вал редуктора (рис 3, а) жестко насажены шкив 1 и колесо 2. Определить силы F2,
Fr2 = 0,4F2, а также реакции опор А и B, если
F1 = 100 Н.
Дано: F1 = 100 кН ; Fr2 = 0,4F2
Найти: силы F2 ; Fr2 ; реакции в опорах RAy ; RAx; RВy ; RВх
Изображаем
1.
силами, а также оси координат (рис. 3,6).
2. Определяем F1 и Fr2. Из условия равновесия вала, имеющего неподвижную ось:
действующими
вал
со
на
него
Решение.
всеми
;
iFM
(2
0)
F
1
d
1
2
F
1
;
d
2
0
2
Н;
F
2
dF
1
1
d
2
100
3,0
1,0
300
4,0
F
r
2
2
300
4,0
120
Н.
F
r
3.Составляем шесть уравнений равновесия для пространственной системы сил:
( i
x FM
)
0
M
x
R
yB
AB
F
2
0
AD
; (1)
;
;
)
0
x FM
( i
xi FM
( i
0)
;
M
y
F
1
3
AC
F
r
2
AD
R
xB
; (2)
0
AB
; (3)
0
DB
M
xi
R
YA
AB
F
2
12
y FM
(1
i
)
0
;
M
R
A
y
y
1
AB
3
F
1
CB
F
r
2
DB
0
; (4)
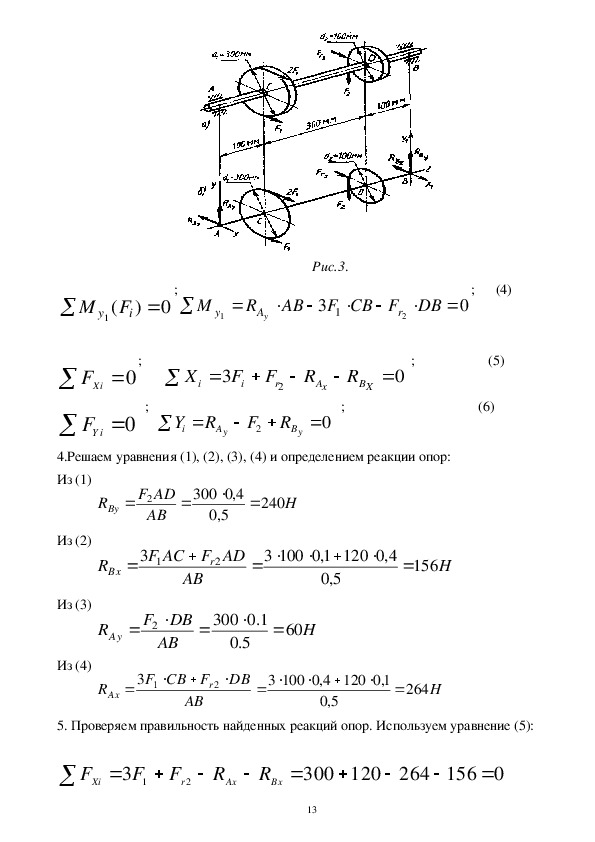
Рис.3.
; (5)
; (6)
;
3
;
X
i
R
xA
FF
i
r
2
0 XiF
0 iYF
4.Решаем уравнения (1), (2), (3), (4) и определением реакции опор:
Из (1)
yA
RY
i
R
yB
0
0
F
2
R
XB
RBy
ADF
2
AB
300
4,0
5,0
3
R
Bx
ACF
1
ADF
r
2
AB
240
Н
3
100
1,0
5,0
120
4,0
156
Н
Из (2)
Из (3)
Из (4)
RAy
F
DB
2
AB
300
1.0
5.0
60
Н
3
F
1
R
Ax
CB
F
r
AB
DB
2
3
100
4,0
5,0
120
1,0
264
Н
5. Проверяем правильность найденных реакций опор. Используем уравнение (5):
F
Xi
F
1
3
F
r
2
R
Ax
R
Bx
300
120
264
156
0
13следовательно, реакции RAх и RВх определены верно.
Используем уравнение (6):
∑FYi = RAy – F2 + RBy= 60 – 300 – 1 – 240 = 0,
следовательно, реакции RAy и RBy определены, верно.
Данную задачу можно решать другим методом: спроектировать тело со всеми
действующими на него активными силами и реакциями опор на три координатные
плоскости, чтобы проще было составлять уравнения равновесия.
Четвертую расчетнографическую задачу на определение координат цента
тяжести плоской детали различной геометрической формы необходимо решать
после изучения тем 1.5, 1.6.
Последовательность решения задачи:
1. Разбиваем конструкцию (ферму, пластину) на простейшие фигуры или
стандартные профили.
2.Определяем центр тяжести каждой элементарной конструкции при заданных осях
координат.
3. Определяем центр тяжести всей конструкции.
4. Строим схему конструкции в масштабе с указанием размеров и точек центра
тяжести.
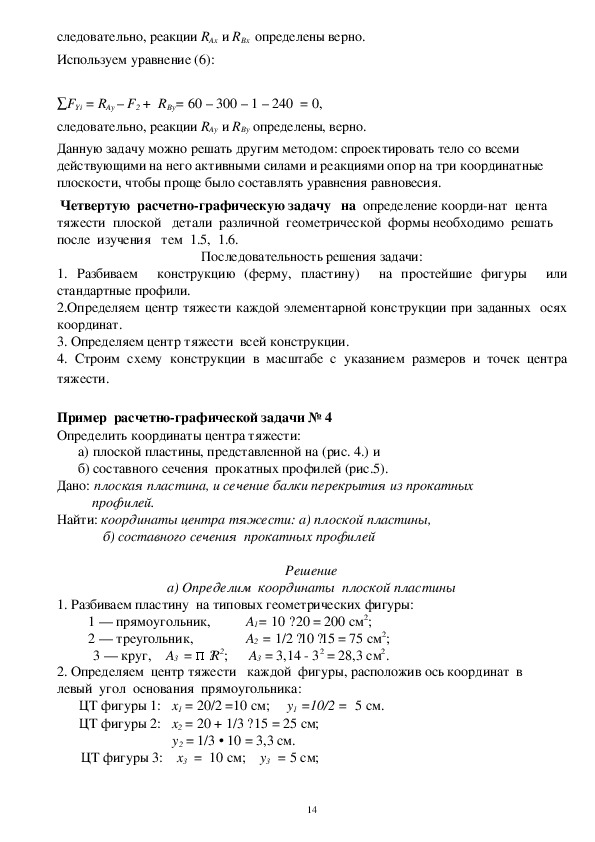
Пример расчетнографической задачи № 4
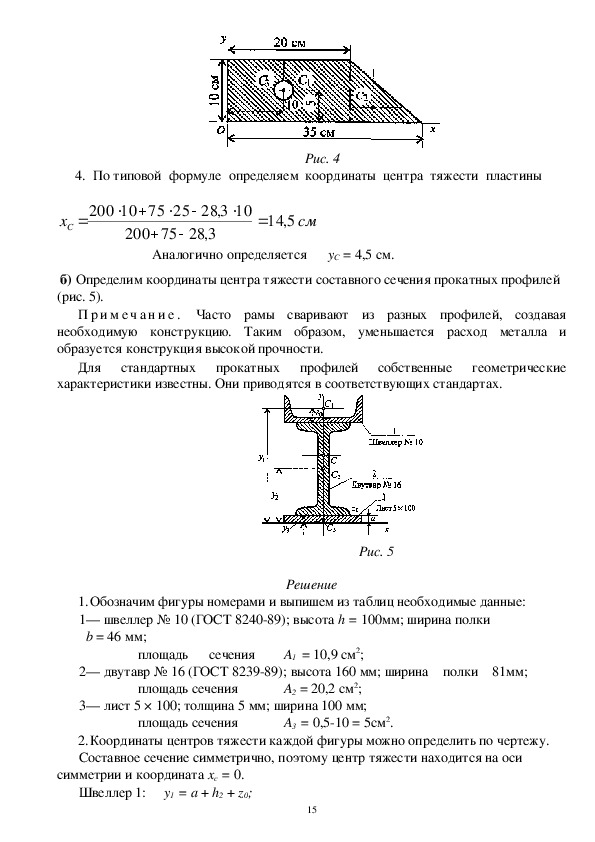
Определить координаты центра тяжести:
а) плоской пластины, представленной на (рис. 4.) и
б) составного сечения прокатных профилей (рис.5).
Дано: плоская пластина, и сечение балки перекрытия из прокатных
профилей.
Найти: координаты центра тяжести: а) плоской пластины,
б) составного сечения прокатных профилей
Решение
а) Определим координаты плоской пластины
1. Разбиваем пластину на типовых геометрических фигуры:
1 — прямоугольник, А1= 10 ? 20 = 200 см2;
2 — треугольник, А2 = 1/2 ?10 ?15 = 75 см2;
?π R2; А3 = 3,14 32 = 28,3 см2.
3 — круг, А3 =
2. Определяем центр тяжести каждой фигуры, расположив ось координат в
левый угол основания прямоугольника:
ЦТ фигуры 1: х1 = 20/2 =10 см; у1 =10/2 = 5 см.
ЦТ фигуры 2: х2 = 20 + 1/3 ? 15 = 25 см;
у2 = 1/3 • 10 = 3,3 см.
ЦТ фигуры 3: х3 = 10 см; у3 = 5 см;
144. По типовой формуле определяем координаты центра тяжести пластины
Рис. 4
200
xC
10
200
75
25
75
103,28
3,28
5,14
см
Аналогично определяется yC = 4,5 см.
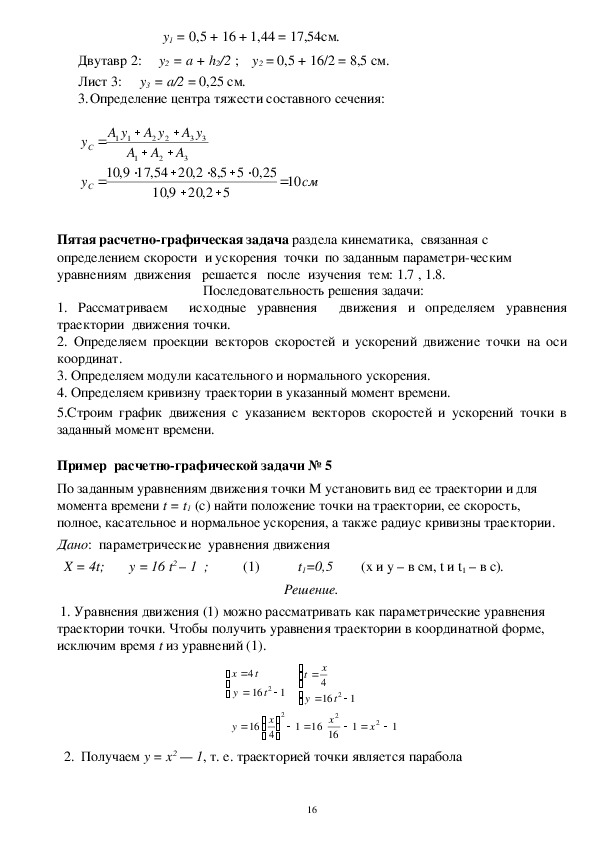
б) Определим координаты центра тяжести составного сечения прокатных профилей
(рис. 5).
П р и м е ч а н и е . Часто рамы сваривают из разных профилей, создавая
необходимую конструкцию. Таким образом, уменьшается расход металла и
образуется конструкция высокой прочности.
Для стандартных прокатных профилей собственные геометрические
характеристики известны. Они приводятся в соответствующих стандартах.
Рис. 5
1.Обозначим фигуры номерами и выпишем из таблиц необходимые данные:
1— швеллер № 10 (ГОСТ 824089); высота h = 100мм; ширина полки
b = 46 мм;
Решение
площадь сечения А1 = 10,9 см2;
2— двутавр № 16 (ГОСТ 823989); высота 160 мм; ширина полки 81мм;
площадь сечения А2 = 20,2 см2;
3— лист 5 × 100; толщина 5 мм; ширина 100 мм;
площадь сечения А3 = 0,510 = 5см2.
2.Координаты центров тяжести каждой фигуры можно определить по чертежу.
Составное сечение симметрично, поэтому центр тяжести находится на оси
симметрии и координата хс = 0.
Швеллер 1: y1 = а + h2 + z0;
15у1 = 0,5 + 16 + 1,44 = 17,54см.
Двутавр 2: у2 = а + h2/2 ; у2 = 0,5 + 16/2 = 8,5 см.
Лист 3: y3 = а/2 = 0,25 см.
3.Определение центра тяжести составного сечения:
yC
yAyA
11
2
3
yA
3
2
AAA
1
3
2
54,17
25,055,82,20
9,10
52,20
9,10
yC
10
см
Пятая расчетнографическая задача раздела кинематика, связанная с
определением скорости и ускорения точки по заданным параметрическим
уравнениям движения решается после изучения тем: 1.7 , 1.8.
Последовательность решения задачи:
исходные уравнения
движения и определяем уравнения
1. Рассматриваем
траектории движения точки.
2. Определяем проекции векторов скоростей и ускорений движение точки на оси
координат.
3. Определяем модули касательного и нормального ускорения.
4. Определяем кривизну траектории в указанный момент времени.
5.Строим график движения с указанием векторов скоростей и ускорений точки в
заданный момент времени.
Пример расчетнографической задачи № 5
По заданным уравнениям движения точки М установить вид ее траектории и для
момента времени t = t1 (с) найти положение точки на траектории, ее скорость,
полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Дано: параметрические уравнения движения
X = 4t; y = 16 t2 – 1 ; (1) t1=0,5 (x и y – в см, t и t1 – в с).
Решение.
1. Уравнения движения (1) можно рассматривать как параметрические уравнения
траектории точки. Чтобы получить уравнения траектории в координатной форме,
исключим время t из уравнений (1).
x
y
4
t
16
2
t
1
x
4
16
t
y
y
16
x
4
2
1
16
x
16
2
t
2
1
1
x
2
1
2. Получаем у = х2 — 1, т. е. траекторией точки является парабола
16Вектор скорости точки
v
x
iv
jv
y
(2)
Вектор ускорения
(3)
a
x
ia
ja
y
Здесь i, j — орты осей х и у, vx, vy, аx, аy — проекции скорости и ускорения точки на
оси координат.
Найдем их, дифференцируя по времени уравнения движения (1):
vx = х = 4 см/с; ах = х = 0;
vy = y = 32t ;
аy = у =32 см/с2.
По найденным проекциям определяются модуль скорости:
2
x
v
v
v
и модуль ускорения точки
16
4
2
2
y
2
(4)
5,16
см
/
с
(5)
2
x
a
a
a
3. Модуль касательного ускорения точки
см
32
32
0
с
/
2
2
2
y
2
(6)
a
dv
dt
Или
av
x
x
a
av
y
y
v
04
32
16
5,16
31
см
/
с
2
dv / dt выражает проекцию ускорения точки на направление ее скорости.
Знак «+» при dv / dt означает, что движение точки ускоренное, направления
и
v
a
совпадают; знак « » что движение замедленное.
Модуль нормального ускорения точки
(7)
an
2v
если радиус кривизны траектории в рассматриваемой точке неизвестен, то
na
можно определить по формуле:
аn
|
av
v
(8)
|
При движении точки в плоскости формула (8) принимает вид
;
а
n
|
av
x
y
v
av
y
x
|
при известном значении величины полного ускорения модуль нормального
ускорения можно определить и следующим образом:
17
2
2
a
a
an
4. После того как найдено нормальное ускорение по формулам (8) или (9), радиус
кривизны траектории в рассматриваемой точке определяется из выражения
8,7
см
32
/
с
2
31
2
2
(9)
35
см
v
a
2
n
5,16 2
8,7
5. По полученным результатам построим график движения точки М, и укажем
на нем ее положение с векторными многоугольниками проекций скоростей и
ускорений.
III. ЗАДАЧИ ДЛЯ РАСЧЕТНОГРАФИЧЕСКИХ РАБОТ
(№1; №2; №3 №4 ;№5)
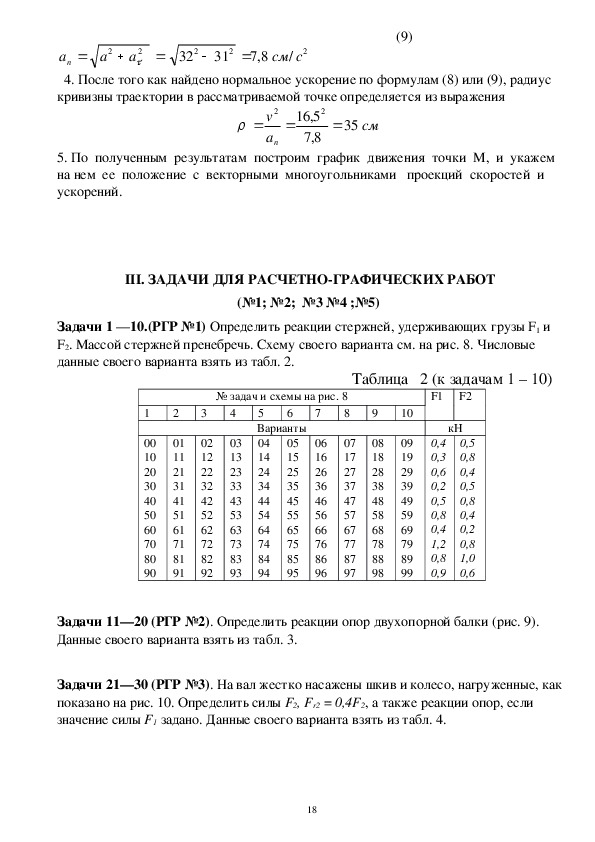
Задачи 1 —10.(РГР №1) Определить реакции стержней, удерживающих грузы F1 и
F2. Массой стержней пренебречь. Схему своего варианта см. на рис. 8. Числовые
данные своего варианта взять из табл. 2.
Таблица 2 (к задачам 1 – 10)
№ задач и схемы на рис. 8
8
4
7
1
00
10
20
30
40
50
60
70
80
90
2
01
11
21
31
41
51
61
71
81
91
3
02
12
22
32
42
52
62
72
82
92
03
13
23
33
43
53
63
73
83
93
6
5
Варианты
04
14
24
34
44
54
64
74
84
94
05
15
25
35
45
55
65
75
85
95
06
16
26
36
46
56
66
76
86
96
07
17
27
37
47
57
67
77
87
97
9
08
18
28
38
48
58
68
78
88
98
10
09
19
29
39
49
59
69
79
89
99
F1
F2
кН
0,4
0,3
0,6
0,2
0,5
0,8
0,4
1,2
0,8
0,9
0,5
0,8
0,4
0,5
0,8
0,4
0,2
0,8
1,0
0,6
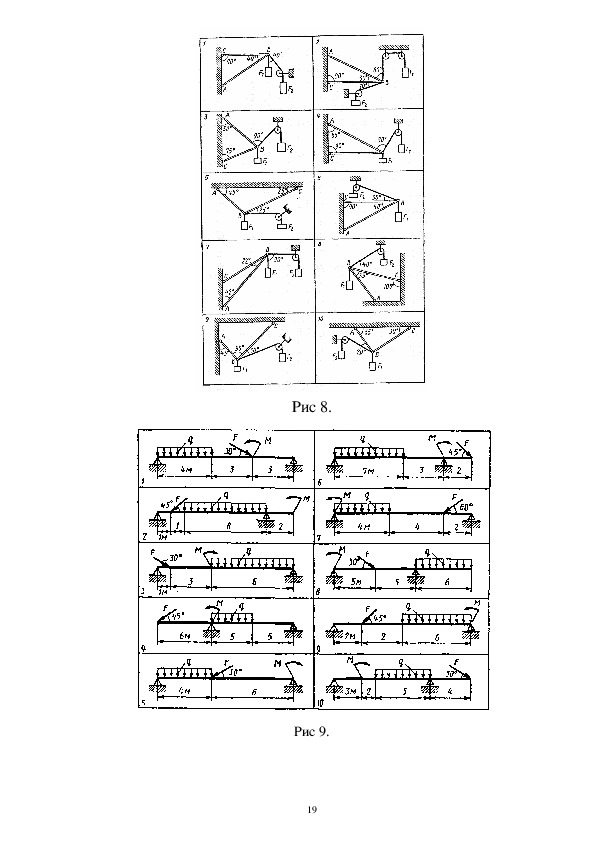
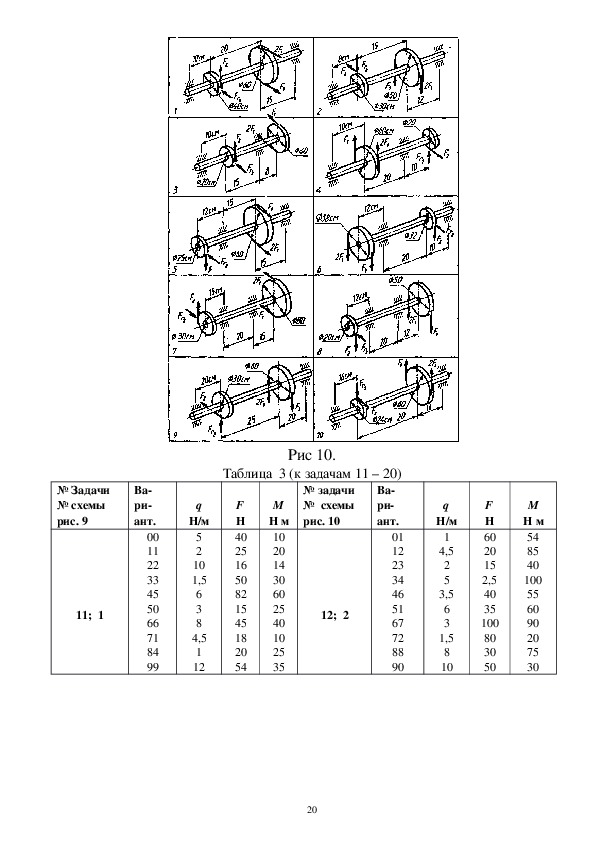
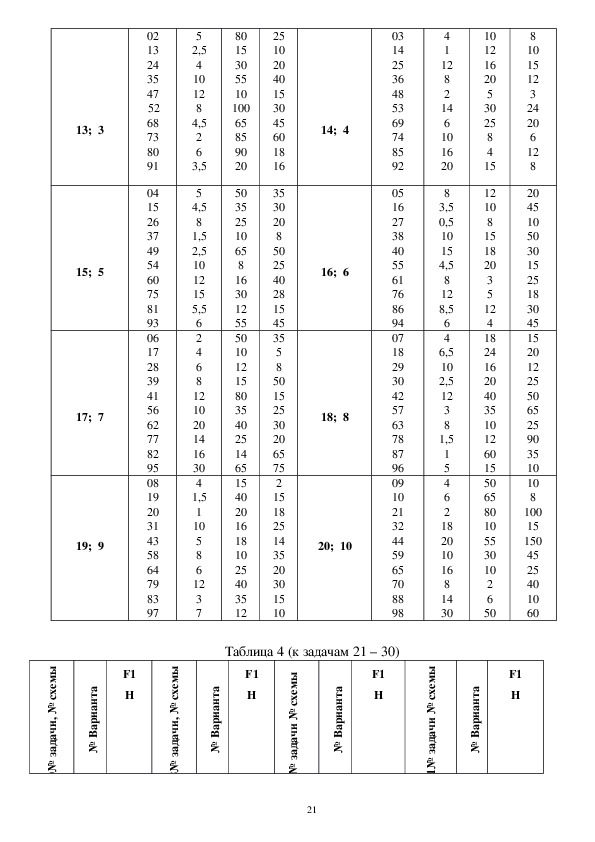
Задачи 11—20 (РГР №2). Определить реакции опор двухопорной балки (рис. 9).
Данные своего варианта взять из табл. 3.
Задачи 21—30 (РГР №3). На вал жестко насажены шкив и колесо, нагруженные, как
показано на рис. 10. Определить силы F2, Fr2 = 0,4F2, а также реакции опор, если
значение силы F1 задано. Данные своего варианта взять из табл. 4.
18Рис 8.
Рис 9.
19№ Задачи
№ схемы
рис. 9
11; 1
Ва
ри
ант.
00
11
22
33
45
50
66
71
84
99
q
Н/м
5
2
10
1,5
6
3
8
4,5
1
12
Рис 10.
№ задачи
№ схемы
рис. 10
12; 2
Таблица 3 (к задачам 11 – 20)
Ва
ри
ант.
01
12
23
34
46
51
67
72
88
90
M
Н м
10
20
14
30
60
25
40
10
25
35
F
Н
40
25
16
50
82
15
45
18
20
54
q
Н/м
1
4,5
2
5
3,5
6
3
1,5
8
10
F
Н
60
20
15
2,5
40
35
100
80
30
50
M
Н м
54
85
40
100
55
60
90
20
75
30
2013; 3
15; 5
17; 7
19; 9
02
13
24
35
47
52
68
73
80
91
04
15
26
37
49
54
60
75
81
93
06
17
28
39
41
56
62
77
82
95
08
19
20
31
43
58
64
79
83
97
5
2,5
4
10
12
8
4,5
2
6
3,5
5
4,5
8
1,5
2,5
10
12
15
5,5
6
2
4
6
8
12
10
20
14
16
30
4
1,5
1
10
5
8
6
12
3
7
80
15
30
55
10
100
65
85
90
20
50
35
25
10
65
8
16
30
12
55
50
10
12
15
80
35
40
25
14
65
15
40
20
16
18
10
25
40
35
12
25
10
20
40
15
30
45
60
18
16
35
30
20
8
50
25
40
28
15
45
35
5
8
50
15
25
30
20
65
75
2
15
18
25
14
35
20
30
15
10
14; 4
16; 6
18; 8
20; 10
03
14
25
36
48
53
69
74
85
92
05
16
27
38
40
55
61
76
86
94
07
18
29
30
42
57
63
78
87
96
09
10
21
32
44
59
65
70
88
98
4
1
12
8
2
14
6
10
16
20
8
3,5
0,5
10
15
4,5
8
12
8,5
6
4
6,5
10
2,5
12
3
8
1,5
1
5
4
6
2
18
20
10
16
8
14
30
10
12
16
20
5
30
25
8
4
15
12
10
8
15
18
20
3
5
12
4
18
24
16
20
40
35
10
12
60
15
50
65
80
10
55
30
10
2
6
50
8
10
15
12
3
24
20
6
12
8
20
45
10
50
30
15
25
18
30
45
15
20
12
25
50
65
25
90
35
10
10
8
100
15
150
45
25
40
10
60
Таблица 4 (к задачам 21 – 30)
F1
Н
а
т
н
а
и
р
а
В
№
ы
м
е
х
с
№
,
и
ч
а
д
а
з
№
0
1
.
с
и
р
F1
Н
а
т
н
а
и
р
а
В
№
ы
м
е
х
с
№
,
и
ч
а
д
а
з
№
8
.
с
и
р
ы
м
е
х
с
№
и
ч
а
д
а
з
№
F1
Н
а
т
н
а
и
р
а
В
№
21
F1
Н
а
т
н
а
и
р
а
В
№
ы
м
е
х
с
№
и
ч
а
д
а
з
№
1
1
.
с
и
р00
12
24
31
42
53
69
70
83
98
04
17
28
35
46
57
65
74
80
92
08
10
22
39
40
1050
667
834
1335
1580
1400
1000
1500
567
1035
3650
3400
2320
2090
1035
1670
520
700
2130
1260
1315
2380
3420
8340
2320
2
6
9
01
13
25
32
43
54
68
71
88
99
05
16
29
36
47
58
64
75
85
93
51
61
78
82
96
1670
1250
2200
1500
534
3320
4540
1385
790
1140
280
595
1000
2400
830
600
670
1880
1870
990
4300
3320
2440
1870
2500
3
7
10
02
14
26
33
44
55
67
72
84
90
06
18
20
37
48
59
63
76
81
94
09
11
23
30
41
825
850
720
2500
4106
1480
1050
2280
875
2600
1140
500
3620
2600
1590
1500
1870
3830
2250
2940
590
1000
1200
5820
2540
1
5
9
03
15
27
34
45
56
66
73
89
91
07
19
21
38
49
50
62
77
86
95
52
60
79
87
97
750
1900
1780
1110
1550
390
596
1410
4160
240
400
1600
1810
1850
6000
3340
1780
1140
2000
4100
1450
1530
6000
6884
500
4
8
10
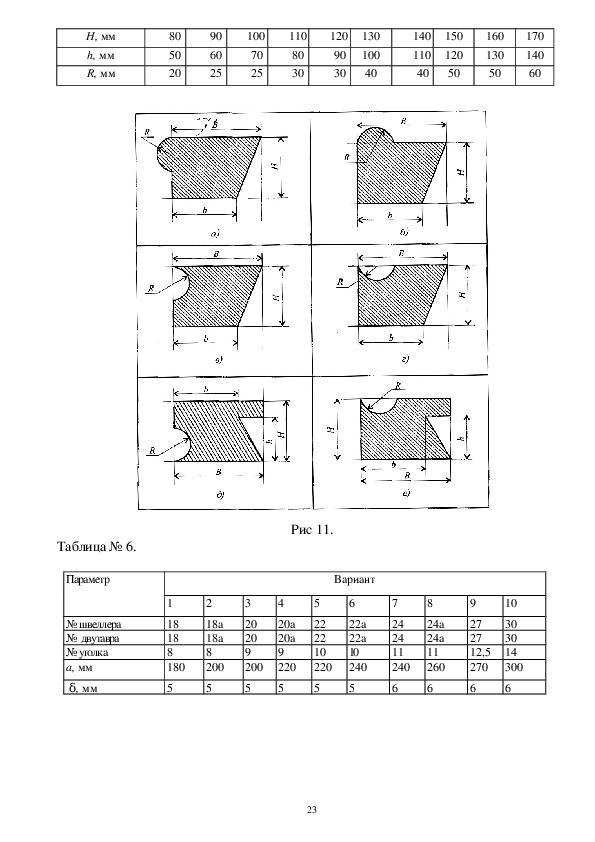
Задачи 31—40 (РГР №4).
а) Определить координаты центра тяжести заданного сечения(рис №11; Табл.№5)
б) Определить координаты центра тяжести составного сечения. Сечения состоят из
листов с поперечными размерами, а х S и прокатных профилей по ГОСТ 823989,
ГОСТ 824089 и ГОСТ 850986. Уголок выбирается наименьшей толщины. (Размеры
стандартных профилей в Приложении 1.) ( рис №11; табл.№5)
Таблица №5
Параметр
В, мм
b, мм
1
100
60
2
110
70
3
120
80
4
130
90
22
Вариант
6
5
140
150
100 ПО
7
160
120
8
170
130
9
180
140
10
190
150Н, мм
h, мм
R, мм
80
50
20
90
60
25
100
70
25
110
80
30
120
90
30
130
100
40
140
110
40
150
120
50
160
130
50
170
140
60
Таблица № 6.
Параметр
№ швеллера
№ двутавра
№ уголка
а, мм
, δ мм
Рис 11.
Вариант
1
18
18
8
180
5
2
18а
18а
8
200
5
3
20
20
9
200
5
4
20а
20а
9
220
5
5
22
22
10
220
5
6
22а
22а
10
240
5
7
24
24
11
240
6
8
24а
24а
11
260
6
9
27
27
12,5
270
6
10
30
30
14
300
6
23Рис 13
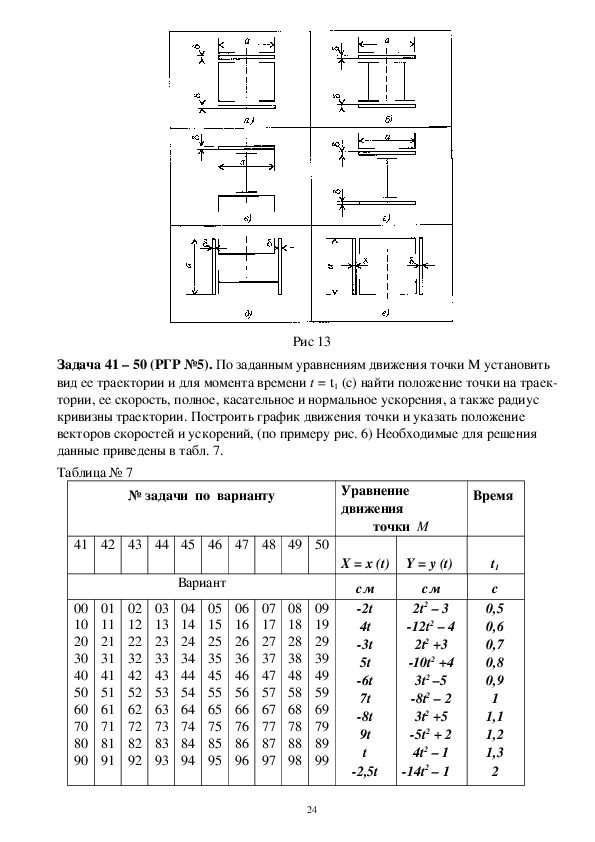
Задача 41 – 50 (РГР №5). По заданным уравнениям движения точки М установить
вид ее траектории и для момента времени t = t1 (с) найти положение точки на траек
тории, ее скорость, полное, касательное и нормальное ускорения, а также радиус
кривизны траектории. Построить график движения точки и указать положение
векторов скоростей и ускорений, (по примеру рис. 6) Необходимые для решения
данные приведены в табл. 7.
Таблица № 7
№ задачи по варианту
41 42 43 44 45 46 47 48 49 50
00
10
20
30
40
50
60
70
80
90
01
11
21
31
41
51
61
71
81
91
02
12
22
32
42
52
62
72
82
92
Вариант
03
13
23
33
43
53
63
73
83
93
04
14
24
34
44
54
64
74
84
94
05
15
25
35
45
55
65
75
85
95
06
16
26
36
46
56
66
76
86
96
07
17
27
37
47
57
67
77
87
97
08
18
28
38
48
58
68
78
88
98
09
19
29
39
49
59
69
79
89
99
24
Уравнение
движения
точки М
X = x (t) Y = y (t)
см
2t
4t
3t
5t
6t
7t
8t
9t
t
2,5t
см
2t2 – 3
12t2 – 4
2t2 +3
10t2 +4
3t2 –5
8t2 – 2
3t2 +5
5t2 + 2
4t2 – 1
14t2 – 1
Время
t1
с
0,5
0,6
0,7
0,8
0,9
1
1,1
1,2
1,3
2Учебнометодическое пособие
по дисциплине «Техническая механика »
по разделу « Теоретическая механика»
специальности 23.02.03 «Техническое обслуживание и ремонт автомобильного
транспорта»
Составил: преподаватель технических дисциплин
к.п.н. Наумов О. Е.
Редактор: к.т.н. Старчакова О.К.
ГБПОУ ВО
« Воронежский государственный
промышленно технологический колледж »
г. Воронеж, ул. 9 – го Января, д. 268
25