Данное методическое пособие представляет краткий сборник лекций по предмету «Техническая механика » раздела «Теоретическая механика» студентов ПССЗ специальности 23.02.03 «ТО и ремонт автомобильного транспорта » и является дополнительным пособием для подготовки студентов к контрольным работам , к сдаче экзамена и при выполнении расчетно-графических задач. Методическое пособие разработано в соответствии с рабочей программой по дисциплине, составленной на основе требований ФГОС.Методическое пособие предназначено для студентов второго курса специальности 23.02.03 «Техническое обслуживание и ремонт автомобильного транспорта». Пособие составлено на основе образовательных стандартов и рабочей программы предмета «Техническая механика» при изучении курса объёмом 144 аудиторных часа
Государственное бюджетное профессиональное образовательное учреждение
«Воронежский государственный промышленнотехнологический колледж»
Воронежской области
(ГБПОУ ВО «ВГПТК»)
ТЕХНИЧЕСКАЯ МЕХАНИКА
Раздел «Теоретическая механика»
Учебнометодическое пособие №1
для самостоятельной работы студентов 2го курса
специальности
23.02.03 «Техническое обслуживание и
ремонт автомобильного транспорта»
Составитель : канд. пед. наук О. Е. НаумовББК 30.12
Воронеж 2016 г.
Данное методическое пособие представляет краткий сборник лекций по предмету
студентов ПССЗ
«Техническая механика » раздела «Теоретическая механика»
специальности 23.02.03 «ТО и ремонт автомобильного транспорта » и является
дополнительным пособием для подготовки студентов к контрольным работам , к сдаче
экзамена и при выполнении расчетнографических задач. Методическое пособие
разработано в соответствии с рабочей программой по дисциплине, составленной на
основе требований ФГОС.
Рецензенты: доцент кафедры «Транспортных машин» ВГАСУ,
канд. техн. наук С.А.Никитин
Печатается по решению методического совета Воронежского государственного
промышленнотехнологического колледжа
2Пояснительная записка.
Методическое пособие предназначено для студентов второго курса
специальности
23.02.03 «Техническое обслуживание и ремонт автомобильного
транспорта». Пособие составлено на основе образовательных стандартов и рабочей
программы предмета «Техническая механика» при изучении курса объёмом 144
аудиторных часа. Оно является первой частью общих разделов курса и
рассматривает вопросы
«Теоретической механики». Пособие состоит из следующих разделов:
1.Статика.
2.Кинематика.
3.Динамика.
В пособии в краткой форме изложены основные теоретические вопросы,
определения, формулы, которые рассматриваются на занятиях со студентами.
Материал построен таким образом, что по мере изучения основных формул и
понятий каждой
вопросы.
Рассматриваемые вопросы относятся к зачетному материалу, на них студент
будет отвечать по окончанию изучения всего курса. Полный список вопросов, и
дополнительная литература предложена в конце пособия.
В методическом пособии намеренно опущены все поясняющие схемы и
графические рисунки, так как они подробно рассматриваются на уроках предмета
«Техническая механика» и в процессе решения расчетнографических задач.
Такой нестандартный подход позволяет дифференцированно обучать и
оценивать знания студентов, и реализовать матричную технологию обучения,
применяемую автором на уроках. Слабому студенту он дает возможность усвоить
минимальный объем знаний для сдачи экзамена, сильному более углубленно и
творчески изучить предмет, преподавателю высвободить время для прямого
диалога со студентами при изучении сложных тем и разделов предмета
«Техническая механика» .
темы студенту
предлагается
ответить
на
3Раздел 1. СТАТИКА
1.1. Основные понятия и аксиомы статики
Статика это раздел теоретической механики, в котором изучаются законы
Теоретическая механика это наука, в которой изучается механическое движение
тел, и устанавливаются общие законы этого движения. Теоретическая механика
разделяется на статику, кинематику и динамику.
приведения и условия равновесия сил, действующих на материальные точки.
Что изучает теоретическая механика?
Встречающиеся в природе материальные тела обладают способностью под действием
приложенных сил в той или иной мере деформироваться, т.е. менять форму вследствие
изменения взаимного расположения образующих их частиц. Однако у большинства
твердых тел (металлов, дерева) в нормальных условиях эти деформации пренебрежимо
малы. Учет их приобретает практическое значение только при рассмотрении вопроса
прочности соответствующих конструкций. Эти вопросы изучаются в разд.
«Сопротивление материалов». При рассмотрении же общих условий равновесия де
формациями большинства твердых тел в первом приближении можно пренебречь. В
связи с этим в механике вводится понятие абсолютно твердого тела.
Абсолютно твердым телом называется тело, расстояние между любыми двумя
точками которого всегда остается неизменным.
В статике мы будем рассматривать все тела как абсолютно твердые, в дальнейшем для
краткости называя их твердыми телами или просто телами.
Другим основным понятием в статике является понятие силы.
Силой называется векторная величина, представляющая собой меру механического
воздействия одних тел на другие.
Что называется абсолютно твердым телом?
4Механическим воздействием называется такое взаимодействие материальных тел, в
результате которого с течением времени происходит изменение взаимного положения
этих тел в пространстве (механическое движение) или изменение взаимного положения
частиц этих тел (деформация). Например, при штамповке деталей верхний штамп,
падая, останавливается в результате взаимодействия с нижним штампом. Если же
между ними положить заготовку, то в результате такого же взаимодействия
происходит деформация заготовки.
Итак, сила Р как векторная величина имеет модуль Р, точку приложения А и
направление (линию действия силы)
Проекции вектора силы Р на оси координат определяются следующим образом:
Модуль вектора Р , т.е. значение силы, определяется по теореме Пифагора:
Введем следующие определения:
Материальной точкой называется абсолютно твердое тело, размерами которого
можно пренебречь, мысленно сосредоточив всю массу этого тела в точке. Например,
движение спутника вокруг планеты можно рассматривать как движение материальной
точки, так как размеры спутника ничтожно малы по сравнению с размерами планеты.
Системой сил называется совокупность нескольких сил, действующих на данное
тело.
Две системы называются эквивалентными, если, действуя на одно и то же твердое
тело, они производят одинаковое механическое воздействие.
Силы, действующие на частицы тела со стороны других материальных тел, называются
внешними силами. Силы, действующие на частицы данного тела со стороны других
частиц этого же тела, называются внутренними силами.
Если под действием данной системы сил свободное тело может находиться в покое,
то такая система сил называется уравновешенной или системой, эквивалентной
нулю.
Если система сил эквивалентна одной силе, то эта сила называется равнодействующей
данной системы сил. Сила, приложенная к телу в какойнибудь одной точке, называется
сосредоточенной силой. Силу, действующую на определенную часть поверхности тела,
называют распределенной.
Какие системы сил называются эквивалентными, и как они связаны с
внешними и внутренними силами?
Все теоремы и уравнения статики базируются на нескольких исходных положениях,
принимаемых без математических доказательств и называемых аксиомами. Аксиомы
статики представляют собой результат знаний, накопленных человечеством, и отра
жают объективные процессы. Справедливость этих аксиом подтверждается
многочисленными опытами и наблюдениями.
Аксиома 1. Две силы, действующие на свободное абсолютно твердое тело, находятся
в равновесии тогда и только тогда, когда они равны по модулю и направлены вдоль
одной прямой в противоположные стороны.
Аксиома 2. Действие данной системы сил на абсолютно твердое тело не изменится,
если к ней прибавить или от нее отнять уравновешенную систему сил.
5Следствие из аксиом 1 и 2: точку приложения силы, действующей на абсолютно
твердое тело, можно переносить вдоль ее линии действия в любую другую точку тела.
Аксиома 3. Две силы, приложенные к телу в одной точке, имеют равнодействующую,
являющуюся диагональю параллелограмма, построенного на этих силах как на
сторонах.
Из аксиомы 3 следует, что равнодействующая двух сил, приложенных в одной точке,
равна их геометрической сумме и приложена в той же точке.
Аксиома 4. Два материальных тела действуют друг на друга с силами, равными по
величине и противоположно направленными. Такая система сил не является
уравновешенной, так как силы приложены к разным телам.
Аксиома 5. Если деформируемое тело находится в равновесии под действием данной
системы сил, то равновесие не нарушится, если тела станут абсолютно твердыми. Эта
аксиома называется аксиомой затвердевания.
Из аксиомы 5 следует, что это условие, являясь необходимым и для абсолютно
твердого тела и для деформируемого, не является для последнего достаточным.
Следствие из каких аксиом характеризует перенос сил вдоль линии её
действия?
1.2. Связи и их реакции
Тело, которое может совершать любые перемещения в пространстве, называется
свободным. Примером свободного тела может служить самолет или снаряд, летящие в
воздухе. В различного рода сооружениях и конструкциях мы обычно встречаемся с
телами, на перемещения которых наложены ограничения. Такие тела называются
несвободными.
Тело, ограничивающее свободу движения твердого тела, является по отношению к нему
связью. Если приложенные к телу силы будут стремиться сдвинуть его по тому или
иному направлению, а связь препятствует такому перемещению, то тело будет
воздействовать на связь с силой давления на связь. По аксиоме 4 статики связь будет
действовать на тело с такой же силой, но противоположно направленной. Сила, с
которой данная связь действует на тело, препятствуя тому или иному перемещению,
называется силой реакции связи.
Из изложенного следует принцип освобождаемости твердого тела от связи, или
аксиома связи: всякое несвободное тело можно рассматривать как свободное, если
мысленно отбросить наложенные на тело связи и приложить вместо них силы реакции
этих связей.
В чем состоит принцип освобождаемости твердого тела от связи?
Силы, действующие на тела, будем разделять на заданные, или активные силы, и
реакции связей, или пассивные силы.
Активные силы отличаются тем, что модуль и направление каждой силы наперед
известны и не зависят от действия других приложенных к данному телу сил.
Примерами активных сил могут служить мускульная сила человека, сила тяжести, сила
сжатой пружины.
6Реакции связи на покоящееся тело возникают лишь в тех случаях, когда это тело под
действием активных сил оказывает давление на связь, поэтому они и называются
пассивными силами.
По аксиоме связи реакция связи направлена в сторону, противоположную той, куда
связь не дает перемещаться телу. Следовательно, если известно, в каком направлении
связь препятствует перемещению твердого тела, то известно и направление реакции
связи.
Чем отличаются активные силы от пассивных?
Рассмотрим наиболее часто встречающиеся типы связей.
1. Гладкая поверхность или плоскость. Гладкой будем называть такую поверхность,
на которой в первом приближении можно пренебречь трением. Связь в виде гладкой
поверхности не дает телу перемещаться только в одном направлении
перпендикулярном к этой поверхности. Поэтому реакция гладкой поверхности
направлена по нормали к этой поверхности и приложена к телу в точке касания.
2. Гладкая опора. Связь, осуществленная в виде гладкой опоры, не дает телу
перемещаться в направлении, перпендикулярном к поверхности тела в точке опоры.
Реакция гладкой опоры направлена по нормали к опирающейся поверхности и
приложена к телу в точках касания .
3. Нить. Связь, осуществляемая в виде гибкой нити, не позволяет телу удаляться от
точки привеса, поэтому реакция связи всегда направлена вдоль нити к точке ее
закрепления.
4. Цилиндрический шарнир. Цилиндрический шарнир допускает вращение вала, но
препятствует его перемещению в плоскости хОу. Поэтому реакция цилиндрического
шарнира расположена в плоскости, перпендикулярной оси возможного вращения, и ее
направление определяют две взаимно перпендикулярные проекции на оси Ох и Оу.
5. Невесомый стержень. Жесткий невесомый (массой его пренебрегают) стержень,
шарнирно прикрепленный к телу, испытывает действие только двух сил, приложенных
в шарнирах А и В. Как и вся конструкция, стержень АВ находится в равновесии. Если
стержень находится в равновесии под действием двух сил, то в соответствии с
аксиомой 1 статики эти силы должны быть равны по модулю, но противоположно
направлены по одной линии действия.
6. Жесткая заделка. Заделка исключает возможность любых перемещений вдоль осей
Ох и Оу, а также поворот в плоскости хОу. Поэтому такая связь при освобождении
тела от связи будет заменяться реакцией
Какая из связей допускает вращение вала препятствуя его перемещению вдоль
оси ?
1.3. Плоская система сил
Система сил, линии, действия которых лежат в одной плоскости, называется
плоской.
На плоскости могут быть приложены произвольно расположенные силы, пары сил и
силы, сходящиеся в одной точке. Рассмотрим равновесие системы сходящихся сил.
7Сходящимися называются силы, линии, действия которых пересекаются в одной
точке. Существуют два способа сложения пересекающихся сил: геометрический и
аналитический.
Условием равновесия системы сходящихся сил является равенство нулю модуля
равнодействующей, т.е. силовой многоугольник должен быть замкнутым (при
геометрическом способе сложения) или, аналитически, проекции равнодействующей
силы на оси координат должны быть равны нулю. Отсюда для плоской системы
сходящихся сил получим два уравнения равновесия этих сил:
Следовательно, для равновесия системы сходящихся сил необходимо и достаточно,
чтобы сумма проекций всех сил на каждую из осей координат была равна нулю.
Пара сил. Система двух равных по модулю, параллельных и противоположно
Что называется плоской системой сил?
Моментом силы F относительно некоторого центра О называется величина, равная
произведению силы на кратчайшее расстояние от точки О до линии действия силы и
взятая с соответствующим знаком. Знак «плюс» соответствует моменту силы, которая
стремится повернуть тело вокруг точки О против хода часовой стрелки, а знак «минус»
если сила стремится повернуть тело по направлению движения часовой стрелки. Если
линия действия силы проходит через точку, то момент силы относительно этой точки
равен нулю.
Перпендикуляр, опущенный из точки О на линию действия силы F, называется ее
плечом относительно центра О.
направленных сил, приложенных телу в двух разных точках, называется парой сил.
Плечом пары называется кратчайшее расстояние между линиями действия сил,
составляющих пару.
Моментом пары сил называется взятое со знаком «плюс» или «минус» произведение
модуля одной из сил на плечо пары.
Что называется моментом силы относительно точки?
Произвольную плоскую систему сил можно заменить одной силой, равной
геометрической сумме всех сил, приложенных в произвольно выбранном центре, и
моментом, равным алгебраической сумме моментов присоединенных пар.
Полученная в результате приведения сила R называется результирующей силой (она
не является равнодействующей для заданной системы сил, так как не заменяет их
действия), а М0 результирующим моментом.
Приняты следующие определения:
1. Точка О называется центром приведения.
2. Вектор R, равный геометрической сумме всех сил, является главным вектором. Его
значение не зависит от выбора центра приведения, т.е. R инвариантная величина.
3. Момент М0,
называется главным моментом; его значение зависит от выбора центра приведения.
Чем отличается сходящиеся силы от произвольно расположенных?
равный алгебраической сумме моментов присоединенных пар,
1.4. Частные случаи приведения.
81. R=0, М0 0 система сил приводится к паре с моментом, равным алгебраической
сумме моментов всех сил относительно центра приведения. В этом случае главный
момент не зависит от центра приведения.
2. R0, Мо=0 система приводится к одной равнодействующей силе, приложенной в
точке О; главный вектор в этом случае является равнодействующей, так как он один
заменяет совокупность действующих сил.
3. R 0, М0 0 такая система сил может быть заменена одной равнодействующей
силой, приложенной в новом центре приведения, расположенном от прежнего на
расстоянии d = М0/R.
4. R = 0, Мо = 0 плоская система сил находится в равновесии.
Аналитические условия равновесия плоской системы сил.
Необходимыми и
достаточными условиями равновесия являются: R = 0 и М0 = 0. Спроектировав вектор
R на оси координат, получим
Rх = 0 и Rу = 0, так как
R
R
2
x R
2
y
(1.1)
Зная, что
R
x
n
i
1
F
ix
R
y
n
i
1
F
iy
(1.2)
получим
аналитические условия равновесия произвольной плоской системы сил:
n
i
1
F
ix
0
n
i
1
F
iy
0
n
i
1
FM
i
(
0
0)
(1.3)
Часто эти уравнения называют основными уравнениями равновесия. В зависимости
от расположения сил иногда целесообразно составлять условия равновесия в виде двух
уравнений моментов и одного уравнения проекций:
В этом случае ось Ох не должна быть перпендикулярна АВ.
Запишите основные уравнения равновесия произвольной плоской системы сил.
1.5. Пространственная система сил
Пространственной будем называть систему сил, линии, действия которых имеют
любые направления в пространстве.
Момент силы относительно точки (центра). Вектор момента силы относительно
некоторого центра есть векторное произведение радиусавектора точки
приложения силы, проведенного из этого центра, на вектор силы
В соответствии с определением
M
o
(FMFr
o
)
(1.4)
9Модуль вектора момента силы относительно центра О будет равен моменту силы
относительно точки О, находящейся с этой силой в одной плоскости.
Известно, что всякий вектор можно разложить по осям координат, так же можно
разложить по осям координат радиусвектор r точки приложения силы и силу F.
Проекции вектора момента силы на ось численно равны моменту силы относительно
оси:
Мх = yFz zFу ;
Мy = zFх – хFz; (1.5)
Мz = хFу уFх;
M
o
MMM
2
x
2
y
2
z
(1.6)
Первые три уравнения являются аналитическим выражением для определения
моментов силы относительно осей координат.
Теорема о приведении пространственной системы сил к заданному центру.
Всякая пространственная система сил, действующих
на абсолютно твердое тело,
может быть заменена одной силой, геометрически равной сумме всех действующих сил,
приложенных в произвольно выбранном центре, и вектороммоментом, равным
геометрической сумме моментов всех сил относительно центра приведения.
Аналитическое выражение для определения главного вектора и главного момента.
Главный вектор R и главный момент М0 были найдены геометрическим путем
(построением векторных многоугольников). Для пространственной системы сил их
проще определять аналитически. Принимаем центр приведения за начало координат.
Тогда, проектируя на оси координат векторные равенства, получаем:
R
x
M
x
n
i
1
n
i
1
F
ix
M
ix
R
y
M
y
n
i
1
n
i
1
F
iy
R
z
M
iy
M
z
n
F
iz
i
1
n
i
1
(1.7)
M
iz
Что называется главным вектором системы сил, и зависит ли он от точки
приведения?
Частные случаи приведения. Любая произвольная пространственная система может
быть заменена главным вектором и главным моментом. Рассмотрим возможные частные
случаи:
а) случай равновесия:
M0= 0 ; R = 0
б) система сил сводится к паре (твердое тело вращается):
R = 0; М0 0;
в) система сил сводится к равнодействующей:
1й случай – R 0, М0 = 0 равнодействующая проходит через центр приведения (точку
О);
102й случай – R 0, М0 0 при этом и результирующая сила и результирующая пара
лежат в одной плоскости, т.е. R М0. Это частный случай плоской системы сил. Ранее
было показано, что такой случай может иметь равнодействующую, приложенную не в
центре приведения, а в другой точке, отстоящей от него на расстоянии, равном М0/R.
Таким образом пространственная система заменена одной равнодействующей, не
проходящей через центр приведения;
г) система сводится к динамическому винту:
R 0 ; М0 0 ,
и они не перпендикулярны.
Аналитические условия равновесия пространственной системы сил.
Необходимыми и достаточными условиями равновесия произвольной
пространственной системы сил является равенство нулю главного вектора и главного
момента:
R= 0; М0 = 0.
Поскольку
R
R
2
x
R
2
y
0
R
2
z
(1.8)
то Rх , Rу и Rz должны быть
равны нулю. Аналогичное рассуждение справедливо и для вектора главного момента.
Следовательно, для равновесия произвольной пространственной системы сил
необходимо и достаточно:
n
i
1
n
i
1
F
ix
0
M
ix
0
i
1
n
n
i
1
F
iy
0
M
iy
0
n
i
1
n
i
1
F
iz
0
M
iz
0
(1.9)
Запишите основные уравнения равновесия произвольной пространственной
системы сил.
1.6. Определение центра тяжести
Центр тяжести твердого тела. Силы притяжения отдельных частиц тела направлены
приблизительно к центру Земли. Так как размеры рассматриваемых тел малы по
сравнению с радиусом Земли, то эти силы можно считать параллельными. Равнодейст
вующая этих параллельных сил, равная их сумме, есть вес тела, а центр этой системы
параллельных сил, в котором приложен вес тела, называется центром тяжести тела.
Точка приложения равнодействующей системы параллельных сил действующих на
одно твердое тело называется центром параллельных сил. Положение центра
параллельных сил относительно начала координат определяется координатами
центра параллельных сил xC , yC , zC .
11Координаты центра параллельных сил определяются по формулам:
x
C
n
i
1
n
i
1
xF
i
F
i
i
;
y
C
n
i
1
n
i
1
yF
i
F
i
i
;
z
C
n
i
1
n
i
1
zF
i
F
i
i
(1.10)
Координаты центра тяжести твердого тела. Если в формулах для определения
координат центра параллельных сил вместо Fiх , Fiy ,Fiz, и R подставить тigх тi gу , тigz ,
и тg, то получим зависимости для определения координат центра тяжести тела:
n
1
i
x
C
xgm
i
x
i
mg
n
i
1
y
C
n
1
i
z
C
xV
i
V
i
;
i
yV
V
i
i
;
(1.11)
ygm
y
i
mg
zgm
z
i
mg
i
zV
i
V
i
где тi, VI соответственно масса и объем каждой частицы твердого тела, а т и V вся
масса и объем однородного тела.
Запишите формулы координат центра тяжести объемного твердого тела.
1.6. Способы определения центров тяжести.
положение центров тяжести которых известно.
Способ разбиения на фигуры,
Применяется в случаях, когда тело можно разбить на конечное число элементов.
Способ дополнения является частным случаем способа разбиения на простейшие
фигуры. Применяется, когда тело разбивается на простейшие фигуры, положения
центров тяжести которых известны, но некоторые из геометрических фигур
представляют из себя пустоты.
Способ интегрирования применяется в случаях, когда для определения центра
тяжести не могут быть применены первые два способа.
Экспериментальный способ осуществляется двумя методами подвешивания и
взвешивания.
Метод подвешивания заключается в том, что плоское тело, которое нельзя разбить на
простейшие фигуры с известным положением центра тяжести, подвешивают на нити.
Прочерчивают линию вдоль этой нити на плоскости тела. Затем эту плоскую фигуру
открепляют и подвешивают за другую точку, после чего вновь проводят вертикальную
линию (вдоль линии подвеса). Пересечение этих двух линий дает точку, в которой
находится центр тяжести.
Метод взвешивания. Обычно применяется для крупных изделий: самолетов, вертолетов
и других машин. Если известна масса, то ставят на весы задние колеса и по показанию
12весов определяют реакцию. Затем составляют одно из уравнений равновесия, и далее
находят искомую величину , т.е. положение центра тяжести.
Перечислите способы определения координат центра тяжести твердого
тела. Укажите отличие экспериментального способа от способа дополнения.
Раздел 2. КИНЕМАТИКА.
2.1. Кинематика точки
Основные понятия. Кинематикой называется раздел механики, в котором изучается
движение материальных тел в пространстве с геометрической точки зрения, вне связи с
силами, вызывающими это движение.
В теоретической механике изучается простейшая форма движения механическое
движение. Механическое движение всегда рассматривается относительно выбранной
системы отсчета, которая может быть подвижной или условно неподвижной. Например,
при рассмотрении механического движения тел, находящихся на земле, за
неподвижную систему осей координат выбираем систему осей, неизменно связанных
с Землей.
Что изучает кинематика?
Способы задания движения материальной точки. Движущаяся точка описывает в
пространстве некоторую линию, или траекторию точки.
Движение точки будет задано естественным способом, если будут известны:
1) траектория точки S;
2) зависимость изменения длины участка траектории от времени или уравнение
движения материальной точки
S = f(t) (2.1.)
3) начало движения;
4) направление отсчета.
Положение точки в пространстве определяется радиусомвектором r, проведенным из
некоторого неподвижного центра в данную точку М . Такой способ задания движения
называется векторным.
Положение точки в пространстве в этом случае будет определяться геометрическим
местом концов векторов r.
При координатном способе задания движения должны быть известны зависимости,
по которым можно определить, как со временем изменяются координаты точки в
пространстве:
13x = f1( t ) ; y = f2( t) ; z = f3( t ) (2.2)
Эти уравнения называются уравнениями движения точки в декартовых
координатах, с их помощью для каждого момента времени можно определить
положение точки в пространстве. Если точка движется на плоскости, то ее
положение определится двумя уравнениями
x = f1( t ) ; y = f2( t) (2.3)
если точка движется по прямой, то ее движение определится только одним
уравнением:
x = f1( t ) (2.4)
Какие два способа задания движения материальной точки вы знаете?
Запишите формулу естественного способа.
2.2. Скорость точки.
Скорость точки характеризует быстроту и направление движения точки. При
векторном способе задания движения положение точки в каждый момент времени
определяется радиусомвектором r1 = r(t).
Пусть в момент времени t точка занимает положение М, определяемое радиусом
вектором r = r(t) . В момент времени t + t точка займет положение М1, определяемое
радиусомвектором r, . Этот радиусвектор будет равен сумме: r1 = r + r .
Отношение r/t является вектором средней скорости, а векторная производная от r
по времени t и будет вектором скорости в данный момент времени:
v (2.5)
rd
dt
Поскольку v есть производная от функции r = r(t) , то вектор скорости всегда
направлен по касательной к траектории движения материальной точки.
Если же движение точки задано естественным способом, то известны ее траектория АВ,
начало движения, направление и уравнение движения
S = S(t) (2.6)
Воспользуемся полученной зависимостью для скорости
величину средней скорости без учета единичного вектора
v и представим
rd
dt
S
vср
t
(2.7)
14Поскольку S величина скалярная, то вектор S/t будет иметь направление
касательной к траектории в точке М.
При движении точки по криволинейной траектории оценку скорости целесообразно
проводить на предельно малом участке при условии что время стремится к
предельно малому значению:
v
lim
t
0
S
t
dS
dt
tS
/
(2.8)
Производная представляет собой алгебраическое значение скорости.
Абсолютная скорость материальной точки есть дифференциал пути по
времени или первая производная пути от времени.
Так как скорость является векторной величиной, то для пространственной
системы отсчета ее абсолютная величина будет равна диагонали параллелепипеда
построенного на проекциях векторов скоростей vх, vу и vz. Тогда модуль вектора
скорости можно определить:
v
v
2
x
v
2
y
v
2
z
(2.9)
Укажите основные отличия определения средней и абсолютной скорости.
Вектор ускорения точки
2.3. Ускорение точки.
a
vd
dt
2
sd
2
dt
(2.10)
Абсолютное ускорение материальной точки есть дифференциал
скорости по времени или вторая производная пути от времени. Если
известны проекции ах, ау и аz этого вектора на оси координат, то можно определить
модуль ускорения:
a
a
2
x
a
2
y
a
2
z
(2.11)
При естественном способе задания траектории движения материальной точки ее вектор
ускорения можно разложить по естественным осям координат a и an :
a
a
na
(2.12)
Проекция ускорения на орт a называется касательным ускорением, которое изменяет
модуль скорости:
a
dv
dt
(2.13)
15Касательное ускорение существует только при неравномерном криволинейном
движении.
Как между собой связаны касательное и нормальное ускорение?
Нормальное ускорение an изменяет направление вектора скорости v , поэтому
материальная точка движется по криволинейной траектории
(ρ радиус кривизны траектории).
an (2.14)
2v
Что называется абсолютной скоростью и абсолютным ускорением?
2.4. Частные случаи движения материальной
точки.
1. an = 0 ; аτ = 0. Следовательно, полное ускорение а = 0. Точка движется равномерно
по прямой линии. Закон движения в этом случае
S = S0 + v0 t (2.15)
где S0 дуговая координата в начальный момент времени; v0 скорость движения точки
в начальный момент движения (скорость не изменится и в любой другой момент
времени t , так как движение не ускоренное).
2. аn ≠ 0; аτ = 0. равномерное криволинейное движение. Вектор скорости мате
риальной точки изменяется лишь по направлению. Закон движения по криволинейной
траектории запишется аналогично первому случаю:
3. an = 0 ; а τ ≠ 0 прямолинейное ускоренное движение по закону
S = S0 + v0 t (2.16)
S
S
0
tv
0
2
ta
2
( 2.17)
4. an ≠ 0; а τ ≠ 0 криволинейное ускоренное движение по закону
S
S
0
tv
0
2
ta
2
( 2.18)
Как от касательного и нормального ускорения зависит характер движения
материальной точки?
2.5. Простейшие движения твердого тела
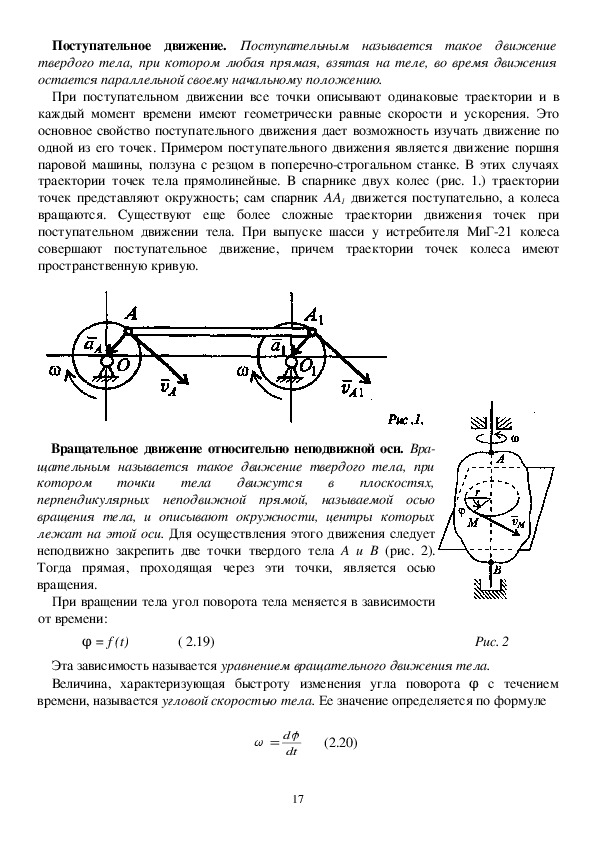
16Поступательное движение.
Поступательным называется такое движение
твердого тела, при котором любая прямая, взятая на теле, во время движения
остается параллельной своему начальному положению.
При поступательном движении все точки описывают одинаковые траектории и в
каждый момент времени имеют геометрически равные скорости и ускорения. Это
основное свойство поступательного движения дает возможность изучать движение по
одной из его точек. Примером поступательного движения является движение поршня
паровой машины, ползуна с резцом в поперечнострогальном станке. В этих случаях
траектории точек тела прямолинейные. В спарнике двух колес (рис. 1.) траектории
точек представляют окружность; сам спарник АА1 движется поступательно, а колеса
вращаются. Существуют еще более сложные траектории движения точек при
поступательном движении тела. При выпуске шасси у истребителя МиГ21 колеса
совершают поступательное движение, причем траектории точек колеса имеют
пространственную кривую.
Рис .1.
Вращательное движение относительно неподвижной оси. Вра
щательным называется такое движение твердого тела, при
котором точки тела движутся в плоскостях,
перпендикулярных неподвижной прямой, называемой осью
вращения тела, и описывают окружности, центры которых
лежат на этой оси. Для осуществления этого движения следует
неподвижно закрепить две точки твердого тела А и В (рис. 2).
Тогда прямая, проходящая через эти точки, является осью
вращения.
При вращении тела угол поворота тела меняется в зависимости
от времени:
φ = f (t) ( 2.19) Рис. 2
Эта зависимость называется уравнением вращательного движения тела.
Величина, характеризующая быстроту изменения угла поворота φ с течением
времени, называется угловой скоростью тела. Ее значение определяется по формуле
d
dt
(2.20)
17Учитывая, что S = rφ и, следовательно,
S
r
,
Получим
dS
dtr
v
M
r
(2.21)
Отсюда найдем линейную скорость точки вращающегося тела
vM = ω r. (2.22)
Величина, характеризующая быстроту изменения угловой скорости с течением време
ни, называется угловым ускорением
d
td
2
2
d
td
(2.23)
Если dω /dt > 0 и dφ /dt > 0, то движение ускоренное; если dω /dt < 0, a dφ /dt > 0
, то движение замедленное.
Какое движение называется поступательным,
а какое вращательным ?
2.6. Частные случаи вращательного
движения тела.
= ω const равномерное вращательное движение по
1.
закону
= φ φ0 +
ω t (2.24)
= ε
const равнопеременное вращательное движение
2.
(равноускоренное или равнозамедленное). Его закон движения:
(2.25)
0
t
0
2
t
2
Плоское движение твердого тела.
Плоским, или плоскопараллельным,
движением твердого тела называется такое движение, при котором каждая
точка тела движется в плоскости, параллельной некоторой неподвижной
плоскости. Примерами плоского движения являются движение шайбы по льду, колеса
поезда по прямолинейному участку пути.
Плоское движение тела можно разложить на поступательное и вращательное
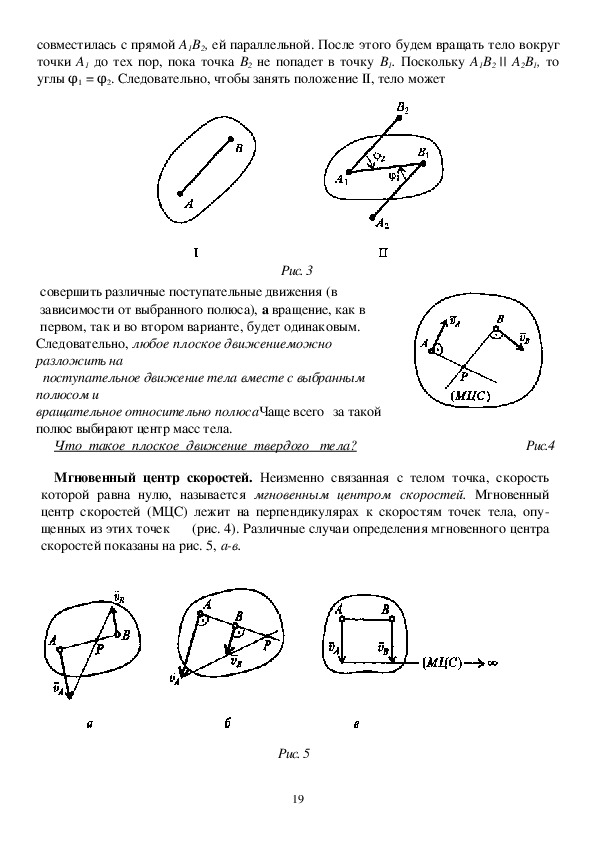
относительно выбранного центра. На рис. 3 показано, что тело из положения I можно
переместить в положение II , используя два варианта.
1вариант. Перемещаем тело поступательно так, чтобы прямая АВ, перемещаясь
параллельно самой себе, заняла в пространстве положение А2В1. После этого повернем
тело вокруг точки В1 на угол φ1.
2вариант. Переместим тело поступательно из положения I так, чтобы прямая А В
18совместилась с прямой А1В2, ей параллельной. После этого будем вращать тело вокруг
точки A1 до тех пор, пока точка В2 не попадет в точку В1. Поскольку A1B2 || A2B1, то
углы φ1 = φ2. Следовательно, чтобы занять положение II, тело может
Рис. 3
совершить различные поступательные движения (в
зависимости от выбранного полюса), а вращение, как в
первом, так и во втором варианте, будет одинаковым.
Следовательно, любое плоское движениеможно
разложить на
поступательное движение тела вместе с выбранным
полюсом и
вращательное относительно полюсаЧаще всего за такой
полюс выбирают центр масс тела.
Что такое плоское движение твердого тела?
Рис.4
Мгновенный центр скоростей. Неизменно связанная с телом точка, скорость
которой равна нулю, называется мгновенным центром скоростей. Мгновенный
центр скоростей (МЦС) лежит на перпендикулярах к скоростям точек тела, опу
щенных из этих точек (рис. 4). Различные случаи определения мгновенного центра
скоростей показаны на рис. 5, ав.
Рис. 5
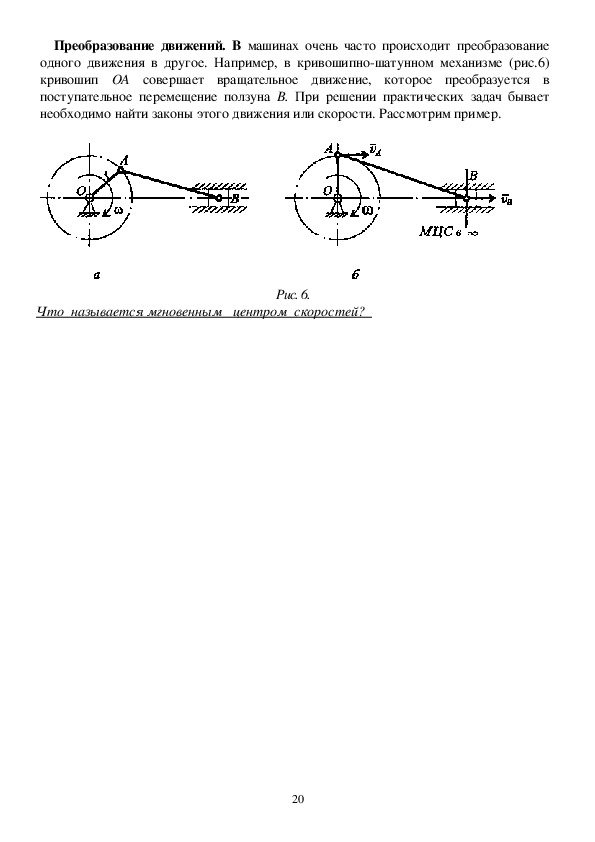
19Преобразование движений. В машинах очень часто происходит преобразование
одного движения в другое. Например, в кривошипношатунном механизме (рис.6)
кривошип ОА совершает вращательное движение, которое преобразуется в
поступательное перемещение ползуна В. При решении практических задач бывает
необходимо найти законы этого движения или скорости. Рассмотрим пример.
Что называется мгновенным центром скоростей?
Рис. 6.
20Раздел 3. ДИНАМИКА.
3.1.
Законы динамики и уравнения
движения точки
Динамикой называется раздел механики, в котором изучается движение
материальных тел под действием приложенных к ним сил.
В основе динамики лежат законы, сформулированные Ньютоном.
Первый закон закон инерции, установленный Галилеем, гласит: материальная
точка сохраняет состояние покоя или равномерного прямолинейного движения,
пока воздействие других тел не изменит это состояние.
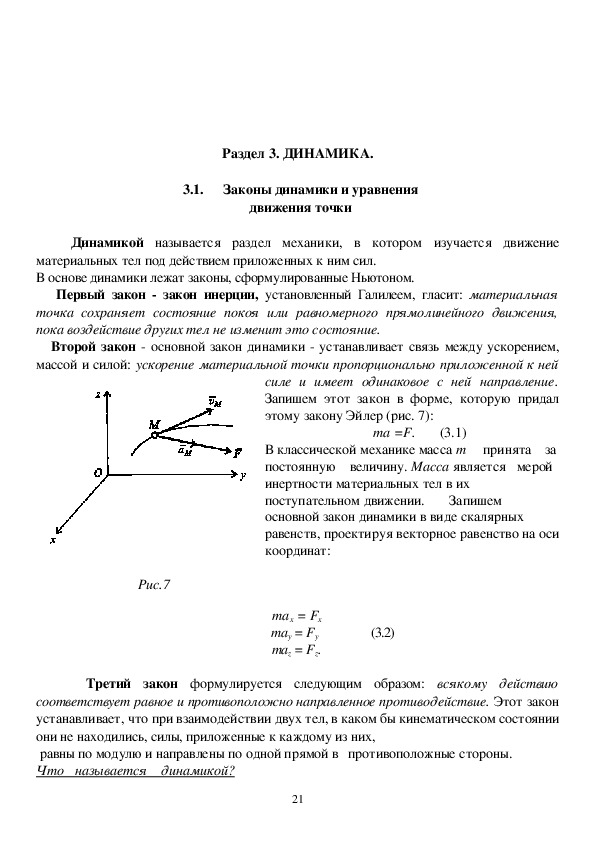
Второй закон основной закон динамики устанавливает связь между ускорением,
массой и силой: ускорение материальной точки пропорционально приложенной к ней
силе и имеет одинаковое с ней направление.
Запишем этот закон в форме, которую придал
этому закону Эйлер (рис. 7):
та =F. (3.1)
В классической механике масса т принята за
постоянную величину. Масса является мерой
инертности материальных тел в их
поступательном движении. Запишем
основной закон динамики в виде скалярных
равенств, проектируя векторное равенство на оси
координат:
Рис.7
max = Fx
тау = Fy (3.2)
maz = Fz.
Третий закон формулируется следующим образом:
всякому действию
соответствует равное и противоположно направленное противодействие. Этот закон
устанавливает, что при взаимодействии двух тел, в каком бы кинематическом состоянии
они не находились, силы, приложенные к каждому из них,
равны по модулю и направлены по одной прямой в противоположные стороны.
Что называется динамикой?
21Четвертый закон не был сформулирован Ньютоном как отдельный закон механики,
но таковым можно считать сделанное им обобщение правила параллелограмма сил:
несколько одновременно действующих сил сообщают точке такое ускорение, какое
сообщала бы одна сила, равная их геометрической сумме.
Векторное выражение основного закона динамики можно спроектировать либо на
декартовы, либо на естественные оси координат. В первом случае получим уравнения
движения материальной точки в прямоугольной декартовой системе координат:
Fxm
x
Fym
y
Fzm
z
(3.3)
ax
где
Во втором случае получим естественные уравнения движения:
az
ay
;
x
;
y
z
m an= Fn ; т аτ = Fτ ; m an = Fn (3.4)
где ап = v2 / ρ ; aτ= d2S / dt2.
Назовите отдельный закон механики обобщающий векторное действие сил в
пространстве.
3.2. Силы, действующие на точки
механической системы.
Механической системой называют мысленно выделенную совокупность материальных
точек, взаимодействующих между собой. Механическую систему иногда называют
материальной системой или системой материальных точек. Существуют системы
свободных точек (например, Солнечная система) и несвободных материальных точек
(их движения ограничены связями). Примером системы несвободных точек может
служить любой механизм или машина.
Все силы, действующие на систему несвободных точек, можно разделить на
задаваемые силы и реакции связей.
По другому признаку силы, действующие на точки любой механической системы,
можно разделить на внешние и внутренние. Условимся обозначать внешние силы FE, а
внутренние силы FJ.
Внешними называют силы, действующие на точки системы со стороны материальных
точек, не входящих в состав данной системы.
Внутренними силами называются силы взаимодействия между материальными точками
данной механической системы. Примером внутренних сил могут служить силы
упругости, действующие между частицами упругого тела, принятого за механическую
систему.
Одна и та же сила может быть как внешней, так и внутренней в зависимости от того,
какая механическая система рассматривается. Например, реакции подшипников вала
являются внешними силами по отношению к валу. Эти же реакции можно отнести к
внутренним силам, если рассматривать всю установку вместе со станиной.
22Таким образом, в зависимости от типа классификации сил любая сила может быть
внешней или внутренней, в то же время она может быть задаваемой или реакцией связи.
Движение точек системы зависит как от внешних, так и от внутренних сил.
Что называется механической системой ?
По закону равенства действия и противодействия каждой внутренней силе
соответствует другая внутренняя сила, равная ей по модулю и противоположная по
направлению.
На основании этого можно сделать следующие выводы:
1.
Главный вектор всех внутренних сил системы равен нулю:
J
R
F
J
i
0 (3.5)
i
Следовательно, и суммы их проекций на координатные оси также равны нулю:
J
ix
F
;0
J
iy
F
;0
0
F
J
iz
(3.6)
2.
Или
i
Главный момент всех внутренних сил системы относительно любого центра и
координатных осей равен нулю:
(3.7)
M
М
J
iO
J
O
k
i
1
FM
(
x
J
i
)
;0
FM
(
y
J
i
;0)
FM
(
z
J
i
)
0
(3.8)
Хотя эти уравнения имеют вид уравнений равновесия сил, произвольно приложенных
в пространстве, но внутренние силы не уравновешиваются, так как они приложены к
разным точкам системы и могут вызвать перемещение этих точек относительно друг
друга.
Если механическая система состоит из некоторого количества материальных
точек k , то определив центр масс такой системы и используя основной закон
динамики учитывая что главный вектор равен нулю можно получить уравнения:
xm
C
k
i
1
E
F
ix
ym
,
C
k
i
1
E
F
iy
,
zm
C
k
i
1
E
F
iz
(3.9)
выражающие
теорему о движении центра масс системы, которая
формулируется следующим образом.
Центр масс механической системы движется как материальная точка с массой,
равной массе системы, к которой приложены все внешние силы, действующие на
эту систему.
Отсюда следует, что внутренние силы не оказывают влияния на движение центра
масс механической системы.
Запишите теорему о движении центра масс механической системы.
3.3
Работа силы.
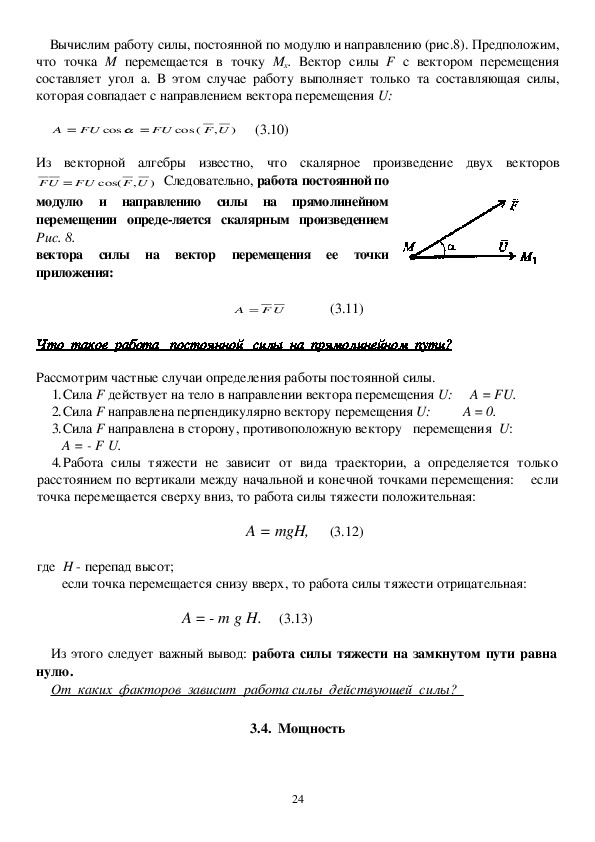
23Вычислим работу силы, постоянной по модулю и направлению (рис.8). Предположим,
что точка М перемещается в точку Мх. Вектор силы F с вектором перемещения
составляет угол а. В этом случае работу выполняет только та составляющая силы,
которая совпадает с направлением вектора перемещения U:
A
FU
cos
FU
cos
(
UF
,
)
(3.10)
,
)
FU
cos( UF
Из векторной алгебры известно, что скалярное произведение двух векторов
Следовательно, работа постоянной по
UF
модулю и направлению силы на прямолинейном
перемещении определяется скалярным произведением
Рис. 8.
вектора силы на вектор перемещения ее точки
приложения:
UFА
(3.11)
Что такое работа постоянной силы на прямолинейном пути?
Рассмотрим частные случаи определения работы постоянной силы.
1. Сила F действует на тело в направлении вектора перемещения U: A = FU.
2.Сила F направлена перпендикулярно вектору перемещения U: А = 0.
3.Сила F направлена в сторону, противоположную вектору перемещения U:
А = F U.
4.Работа силы тяжести не зависит от вида траектории, а определяется только
расстоянием по вертикали между начальной и конечной точками перемещения: если
точка перемещается сверху вниз, то работа силы тяжести положительная:
А = mgH, (3.12)
где H перепад высот;
если точка перемещается снизу вверх, то работа силы тяжести отрицательная:
А = m g H. (3.13)
Из этого следует важный вывод: работа силы тяжести на замкнутом пути равна
нулю.
От каких факторов зависит работа силы действующей силы?
3.4. Мощность
24Одна и та же работа может быть выполнена за различные промежутки времени.
Поэтому вводят понятие мощности N, которая определяется отношением работы ко
времени.
Если в выражение мощности подставить вместо перемещения U=vt,
то при
равномерном прямолинейном движении мощность можно определять через силу и
скорость движения:
N = F v cosα (3.14)
При работе машин часто бывает необходимо выразить мощность через угловую
скорость вращения ω. Для равномерного вращательного движения справедлива
следующая формула:
MN
кр
М
кр
n
30
(3.15)
где Mкр крутящий момент относительно оси вращения; п частота вращения, об/мин.
Что называется мощностью?
3.5. Коэффициент полезного действия
Чтобы произвести полезную работу, необходимо затратить несколько большую
работу, так как часть ее расходуется на преодоление сил сопротивления (сил трения в
зубчатых передачах и опорах, сопротивления воздуха и другой среды, в которой
перемещается материальная точка). Эффективность работы какойлибо установки или
машины оценивается коэффициентом полезного действия η.
Коэффициентом полезного действия (КПД) машины называют отношение полезной
работы к полной затраченной работе:
А
А
полез
полн
1
(3.16)
Что называется коэффициентом полезного действия?
25Вопросы и задания по разделу
«Теоретическая механика»
1. Что изучает теоретическая механика?
2. Что называется абсолютно твердым телом?
3. Какие системы сил называются эквивалентными, как они связаны с
внешними и внутренними силами?
4. Следствие из каких аксиом характеризует перенос сил вдоль линии её
действия?
5. В чем состоит принцип освобождаемости твердого тела от связи?
6. Чем отличаются активные силы от пассивных?
7. Какая из связей допускает вращение вала, препятствуя его перемещению
вдоль оси?
8. Что называется плоской системой сил?
9. Что называется моментом силы относительно точки?
10.Чем отличается сходящиеся силы от произвольно расположенных?
11.Что называется главным вектором системы сил, зависит ли он от
точки приведения?
12.Запишите основные уравнения равновесия произвольной плоской системы
сил.
13.Запишите основные уравнения равновесия произвольной пространственной
системы сил.
14.Запишите формулы координат центра тяжести объемного твердого
тела.
15.Перечислите способы определения координат центра тяжести твердого
тела.
16.Укажите отличие экспериментального способа от способа дополнения.
17.Что изучает кинематика?
18.Какие два способа задания движения материальной точки вы знаете?
Запишите формулу естественного способа.
19.Укажите основные отличия определения средней и абсолютной
скорости.
20.Как между собой связаны касательное и нормальное ускорение?
21.Что называется абсолютной скоростью и абсолютным ускорением?
2622.Как от касательного и нормального ускорения зависит характер
движения материальной точки?
23.Какое движение называется поступательным, а какое вращательным?
24.Что такое плоское движение твердого тела?
25.Что называется мгновенным центром скоростей?
26.Что называется динамикой?
27.Назовите отдельный закон механики, обобщающий векторное действие
сил в пространстве.
28.Что называется механической системой?
29.Запишите теорему о движении центра масс механической системы.
30.Что такое работа постоянной силы на прямолинейном пути?
31.От каких факторов зависит работа силы действующей силы?
32.Что называется мощностью?
33.Что называется коэффициентом полезного действия?
Литература.
Вереина Л.И. Техническая механика: учебник для среднего проф. образов. – М.:
Издательский центр «Академия»,2011. – 288с.
Аркуша А.И. Техническая механика: учеб. для средних спец. учеб. Заведений –
М.:Высш.шк.,2012. – 352с.: ил;
Олофинская В.П. Техническая механика: Курс лекций с вариантами практических
заданий: учебное пособие. – М.: ФОРУМ: ИНФРАМ, 2012. – 349с., ил. –
( Профессиональное образование)
27ТЕХНИЧЕСКАЯ МЕХАНИКА
Раздел «Теоретическая механика»
Учебнометодическое пособие №1
для самостоятельной работы студентов 2го курса
специальности
23.02.03 «Техническое обслуживание
и ремонт автомобильного транспорта»
Составил: преподаватель технических дисциплин
Канд. пед. наук. Наумов О. Е.
Редактор: канд. техн. наук Старчакова О.К.
ГБПОУ ВО
« Воронежский государственный
промышленно технологический колледж »
г. Воронеж, ул. 9 – го Января, д. 268
28