Поделиться

Тема: Движение тел переменной массы.
Содержание:
I.
Введение
3 стр.
стр.
9 стр.
II. Основная часть:
1. Уравнения Мещерского и Циолковского
2. Работа силы, мощность, энергия. Консервативные и неконсервативные силы и системы.
3. Кинетическая и потенциальная энергия.
13 стр.
III.
Заключение
17 стр.
IV. Литературы и интернет ресурсы
18 стр.
5
Введение:
Движение тел с переменной массой представляет собой важную область физики, которая находит своё применение в различных технологических и научных областях, таких как космические полёты и ракетная техника. Эта тема объединяет законы сохранения импульса и энергии с уравнениями движения, включающими изменение массы тела во времени. В данной работе рассмотрим основные принципы, уравнения и применения движения тел с переменной массой.
Переменная масса – это масса тела, которая может меняться при медленных движениях из-за частичных приобретений или потерь составляющего вещества.
Движение тела переменной массы. Уравнения Мещерского и Циолковского. Работа силы, мощность, энергия. Консервативные и некон-сервативные силы и системы. Кинетическая и потенциальная энергия.
В природе и технике нередки случаи, когда масса тел изменяется с тече- нием времени за счет потери или приобретения вещества. Так, масса ме- теорита при полете в атмосфере уменьшается в результате отрыва или сго- рания его частиц; масса дождевой капли растет при падении в перенасы- щенном водяным паром воздухе; масса дрейфующей льдины увеличивается при намерзании и уменьшается при таянии; масса машины для поливки улиц уменьшается при вытекании водяных струй; масса ракеты уменьшается в результате вытекания газов, которые образуются при сгорании топлива, и т.д. Во всех этих случаях имеют дело с движением тел переменной массы. Уравнения движения тел переменной массы являются следствием законов Ньютона, тем не менее, эти уравнения представляют самостоятельный ин- терес, главным образом как теоретическая основа ракетной техники.
Вывод уравнения движения тела переменной массы рассмотрим на при- мере движения простейшей ракеты. Будем рассматривать ракету как доста- точно малое тело, положение центра масс которого не изменяется по мере сгорания топлива. В этом случае ее можно считать материальной точкой пе- ременной массы, положение которой совпадает с центром масс. Будем счи-
тать, что вылетающая из ракеты частица газа массой dm взаимодействует с ней только в момент отделения. Примем также, что изменение массы раке-ты происходит непрерывно, без скачков, т.е. существует производная массы
по времени, которая характеризует быстроту изменения массы dm / dt .
Пусть в момент времени t ракета с топливом имеет массу m , скорость
относительно неподвижной системы отсчета (Земли) → и импульс p→ m→. За время dt от ракеты отделяется некоторая масса газа dm , скорость ко-

торой относительно ракеты u . Относительно выбранной нами неподвижной
системы отсчета ее скорость будет u , а импульс
Г
p
→ → →
dm u . Мас-
са ракеты станет
m dm ,
скорость
d ,
а импульс
→
pp m dm d .
В общем случае на ракету будут действовать внешние силы, в числе ко-
торых силы гравитационного притяжения Земли, Солнца и планет, а также сила сопротивления среды, в которой она движется. В соответствии с основ-
изменение импульса системы (ракета– импульсу результирующей внешних сил
ным законом динамики выбрасываемые газы) равно
( →
dp Fdt ) или
→ → →
m dm→ d → dmu m Fdt .
Раскрыв скобки и, пренебрегая произведением малой величиной высшего порядка, получим:
md → dmu
dmd
как бесконечно
→ Fdt .
Разделив последнее соотношение на dt , получим уравнение
dt dt
F u
m d → → dm .
Это уравнение динамики тела переменной массы впервые было полу- чено профессором Петербургского политехнического института И.В. Мещерским и носит его имя.
Сравнивая полученное уравнение со вторым законом Ньютона, отметим,
что левая часть представляет собой произведение массы и ускорения раке- ты. Следовательно, справа должна стоять сумма сил, которые действуют на ракету. Отсюда приходим к выводу, что второе слагаемое в правой части также выражает силу. Для выяснения ее природы рассмотрим случай, когда
внешние силы отсутствуют
( F 0 ),
т.е. система ракета–
выбрасываемые газы является замкнутой. На основе закона сохранения им-
пульса можно утверждать, что суммарный импульс системы остается неиз-
менным. В этом случае получаем соотношение
md dmu , на основе
которого можно сделать вывод о том, что ракета получает такое же прира- щение импульса, как и выбрасываемые газы, только в противоположном на- правлении. Причиной изменения импульсов отдельных частей замкнутой системы могут быть только внутренние силы, действующие между ними. Та- ким образом, на ракету со стороны газов действует сила
Fр u dt
→
→ dm .
Эта сила называется реактивной. Она прямо пропорциональна быстро-
те изменения массы тела dm / dt и относительной скорости отделяемых
частиц u и направлена в сторону, противоположную вектору u→. Величину
dm / dt называют расходом газа или жидкости.
Использование реактивной силы лежит в основе работы реактивных дви- гателей, которые делятся на два основных класса: ракетные и воздушно- реактивные.
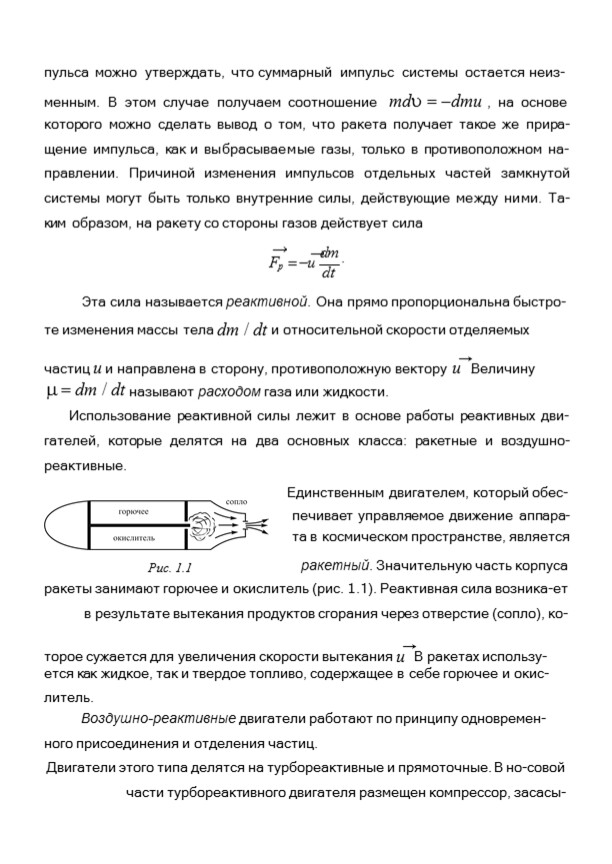
Единственным двигателем, который обес-
печивает управляемое движение аппара- та в космическом пространстве, является
ракетный. Значительную часть корпуса
ракеты занимают горючее и окислитель (рис. 1.1). Реактивная сила возника-ет в результате вытекания продуктов сгорания через отверстие (сопло), ко-
торое сужается для увеличения скорости вытекания u→. В ракетах использу- ется как жидкое, так и твердое топливо, содержащее в себе горючее и окис-
литель.
Воздушно-реактивные двигатели работают по принципу одновремен- ного присоединения и отделения частиц.
Двигатели этого типа делятся на турбореактивные и прямоточные. В но-совой части турбореактивного двигателя размещен компрессор, засасы-
Рис. 1.1
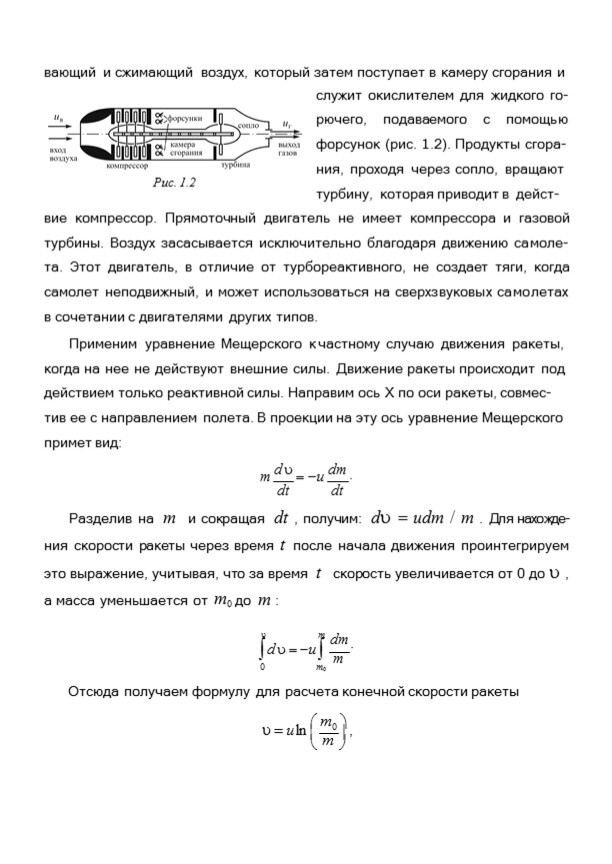
вающий и сжимающий воздух, который затем поступает в камеру сгорания и
служит окислителем для жидкого го- рючего, подаваемого с помощью форсунок (рис. 1.2). Продукты сгора-
ния, проходя через сопло, вращают турбину, которая приводит в дейст-
вие компрессор. Прямоточный двигатель не имеет компрессора и газовой турбины. Воздух засасывается исключительно благодаря движению самоле- та. Этот двигатель, в отличие от турбореактивного, не создает тяги, когда самолет неподвижный, и может использоваться на сверхзвуковых самолетах в сочетании с двигателями других типов.
Применим уравнение Мещерского к частному случаю движения ракеты, когда на нее не действуют внешние силы. Движение ракеты происходит под
действием только реактивной силы. Направим ось X по оси ракеты, совмес- тив ее с направлением полета. В проекции на эту ось уравнение Мещерского
примет вид:
m d u dm .
dt dt
Разделив на m и сокращая dt , получим: d udm / m . Для нахожде- ния скорости ракеты через время t после начала движения проинтегрируем это выражение, учитывая, что за время t скорость увеличивается от 0 до , а масса уменьшается от m0 до m :
d u m
m dm .
0 m0
Отсюда получаем формулу для расчета конечной скорости ракеты
m
u ln m0 ,
Рис. 1.2
где m0 – начальная масса ракеты вместе с топливом; m – конечная масса
ракеты.
Эта формула была получена в 1903 г. К.Э. Циолковским и носит его имя. Из нее следует, что конечная скорость, приобретаемая ракетой при отсутст- вии внешних сил, не зависит от закона изменения массы и ограничена толь- ко отношением начальной и конечной масс ракеты.
Полученная формула позволяет оценить максимальную скорость, кото- рую может развить ракета, если предположить, что внешние силы не дейст-
вуют. Предельная относительная скорость истечения газов через сопло uм определяется химическим составом и температурой сгорания топлива и обычно не превосходит 3–4 км/с. Максимальное значение отношения масс
m0 / m ограничено прочностью конструкции, и для современных материа-
лов ее можно принять 10 . Тогда предельная скорость простейшей одно- ступенчатой ракеты не превысит 7 км/с, что меньше первой космической скорости.
Для получения космических скоростей Циолковский предложил исполь- зовать многоступенчатые ракеты, которые представляют собой несколько
«посаженных» друг на друга ракет. Когда горючее первой ракеты (ступени) полностью использовано, она отделяется и начинают работать двигатели второй ступени и т.д. Для запуска космических кораблей и искусственных спутников применяются трехступенчатые ракеты.
В настоящее время ведутся интенсивные работы по созданию новых типов ракетных двигателей, которые принципиально отличаются от твердо-
тельных и жидкостных реактивных двигателей. В атомных двигателях рабо- чее вещество нагревается в ядерном реакторе и затем вытекает через со-
пло. В ионном ракетном двигателе реактивная сила тяги создается в резуль- тате выбрасывания из двигателя заряженных частиц – ионов, которые пред-
варительно разгоняются в электрическом поле до больших скоростей.
Повседневный опыт убеждает нас в том, что перемещения тел происхо- дят только под действием сил. Поэтому возникает необходимость дать коли- чественную характеристику действия этих сил, которое связано с перемеще- нием тел. В физике такой характеристикой является работа силы, которая определяет количественную меру передачи движения от одного тела (сис- темы тел) к другому телу (системе тел) под действием силы.
Под работой в механике понимают физическую скалярную величину, ко- торая характеризует процесс перемещения тела под действием силы. Если
материальная точка под действием постоянной силы
F
совершила беско-
нечно малое перемещение dr , то элементарная работа этой силы
A F dr cos ,
где
– угол между направлениями векторов силы и перемещения. Эту
→ ,
формулу можно записать в виде скалярного произведения
A F dr
т.е. элементарная работа постоянной силы определяется скалярным произ- ведением вектора силы и вектора перемещения.
Обратим внимание, что элементарная работа обозначена A , а не пол- ным дифференциалом dA . Это связано с тем, что в общем случае работа не является однозначной функцией состояния, т.е. она может зависеть не
только от начального и конечного состояний, но и от того, по какому пути происходит перемещение материальной точки. Другими словами, работа не является функцией состояния, а является функцией процесса. Исключение из этого составляет особый класс сил, называемых консервативными, кото- рые более подробно будут рассмотрены в дальнейшем.
При прямолинейном движении тела под действием постоянной силы
F
модуль вектора перемещения равен пути:
→
r s . В этом случае
A Fs cos Fs s ,

где Fs S cos – проекция силы на направление движения.
Если угол
900 , то cos 0
и работа силы положительная; при
900 ( cos 0 ) 900 ,
и работа силы отрицательная. Если то
cos 0 и работа силы равна 0. В случае, когда перемещение равно нулю, работа силы также равна нулю. В частности, если человек стоит неподвижно и держит какой-нибудь груз, то работа мускульной силы равна нулю. В дан-
ном случае имеет место выполнение биохимической работы.
Если сила, действующая на тело во время его движения, переменная, то для подсчета работы силы необходимо весь путь s разбить на элементарные (не
обязательно одинаковые) участки s → , на кото-
i ri
рых силу можно считать постоянной (рис. 1.3). Работа
силы Fsi на элементарном участке пути si
Ai Fsi si cos i .
Работа на конечном участке движения 1–2 равна сумме элементарных работ
A12 Ai .
i
Переходя к пределу при s 0 , получим:
2 2
12
1 1
A F cos ds FS ds , или
2 → →
A12 Fdr .
1
Отметим, что численное значение работы, выполненной конкретной си-
лой, зависит от выбора системы отсчета, поскольку перемещение тела в различных системах отсчета разное, т.е. работа является относительной физической величиной.
Рис. 1.3
Графически работа на пути от точки 1 до точки 2 равна площади фигуры,
ограниченной ординатами этих точек, осью s и кривой зависимости
Fs f s (рис. 1.3). Поскольку работа силы – скалярная величина, то работа
суммарной силы равна алгебраической сумме работ составляющих сил.
Все силы, рассматриваемые в механике, подразделяются на два класса: консервативные и неконсервативные. Силы, работа которых не зависит от формы траектории, по которой тела переходят из одного положения в дру- гое, называются консервативными или потенциальными. Это силы упруго- сти, силы гравитационного притяжения. Силы в том случае консервативны, если в системе нет перехода механического движения в другие формы дви- жения материи.
Механические системы, в которых действуют только консервативные си- лы, называются консервативными. Среди неконсервативных сил выделим диссипативные силы. Диссипативными называют такие силы, полная работа которых в замкнутой системе всегда отрицательная. Под действием дисси- пативных сил определенная часть механической энергии переходит во внут- реннюю энергию тел. Примером диссипативной силы является сила трения.
Для консервативных сил работа является функцией состояния, т.е. мо- жет быть представлена в виде разности значений некоторой функции коор- динат и скоростей, а элементарную работу этих сил обозначают полным дифференциалом dA .
На практике часто оказывается важным знать не только величину работы силы, но и скорость, с которой она выполняется. Физическая величина, ха-
рактеризующая скорость выполнения работы, называется мощностью.
Средней мощностью называют физическую скалярную величину, равную отношению работы к интервалу времени, за который она выполнена
A Fs cos .
t t
N
Если сила с течением времени изменяется, то мощность также не оста- ется постоянной. В данном случае определяют мгновенную мощность
N A .
dt
→
Поскольку A Fdr , то
dt dt
N A → dr →→ .
F F
Мгновенная мощность равна скалярному произведению вектора силы и вектора скорости. Из последней формулы видно, что мощность механизма можно повысить за счет увеличения силы тяги или за счет увеличения ско- рости движения.
В механике изучается простейший вид движения – перемещение тел или частей тела относительно друг друга. В процессе взаимодействия тел про- исходит обмен механическим движением между телами или его переход в другие формы движения.
Универсальной количественной мерой движения материи при всех его
превращениях из одного вида в другой является физическая скалярная ве- личина, называемая энергией. Поскольку процесс превращения одного вида движения в другой сопровождается работой, то ее целесообразно выбрать в качестве количественной меры изменения энергии тела, т.е. допустить, что
A E . Энергия – это функция состояния физической системы, измене- ние которой равно работе. Функциями состояния системы называются физи- ческие величины, значения которых полностью определяются состоянием
физической системы и не зависят от пути перехода в это состояние.
Таким образом, энергия является важнейшей физической величиной, ха- рактеризующей способность тела или системы тел совершать работу при определенных условиях.
Состояние механической системы определено, если известно простран-
ственное положение тел системы (их координаты) и скорости всех тел сис-
→ .
темы. В соответствии с этим в механике рассматриваются только два вида энергии: кинетическая и потенциальная.
Кинетическая энергия – это энергия, которой обладают тела вследствие движения. Определим соотношение между работой силы и кинетической
энергией. Пусть под действием силы F материальная точка массой m , ко- торая находилась в состоянии покоя, приобретает скорость . В этом с лу- чае работа силы идет на увеличение кинетической энергии, причем кинети-
ческая энергия материальной точки возрастает на величину, равную выпол- ненной работе. В соответствии со вторым законом Ньютона
F ma
Умножив левую и правую части этого выражения на бесконечно малое
перемещение dr , получим:
A Fdr madr
→ → → .
Используя известные соотношения
a
→ d
dt
dr dt
, , а также учитывая,
2
что →d→ 1 d 2 , предыдущее равенство можно записать:
2
A md d
→ → m2
.
0
2
Чтобы найти работу силы, под действием которой материальная точка на
конечном перемещении приобретает скорость , проинтегрируем правую и левую части последнего равенства с учетом возрастания скорости от нуля до :
A md
→ → m2
.
Полученная работа A Eк m /2 , необходимая для приобретения
2
точкой скорости , называется кинетической энергией материальной точки.
Полная работа равнодействующей силы для изменения скорости матери-
альной точки от значения 1 до 2 определится по формуле
1
12
2
2
A m d
2 1
2 →
→ m2 m2
или
A12 Eк 2 Eк1 .
Таким образом, работа равнодействующей всех сил, приложенных к ма-
териальной точке, равна изменению кинетической энергии точки, которое произошло за время действия сил. Это утверждение называют теоремой об изменении кинетической энергии.
Последняя формула показывает, что работа, совершаемая внешними силами, действующими на тело, идет на приращение его кинетической энер-
Eк 2
гии. Если работа положительная ( A 0 ), то Eк1 , т.е. кинетическая
энергия тела возрастает. Если же работа отрицательная, то Eк 2 Eк1 0 и кинетическая энергия тела уменьшается. Скорость движения тела, как из- вестно, зависит от выбора системы отсчета, поэтому кинетическая энергия также зависит от выбора системы отсчета, т.е. является величиной относи- тельной. Кинетическая энергия механической системы равна сумме кинети- ческих энергий тел, которые образуют систему
Eк Eкi .
i
Кинетическая энергия тела не зависит от способа, которым она была ему сообщена, а определяется только величиной скорости при постоянной массе тела (или импульса)
p2
m2
Eк 2 2m
Определим потенциальную энергию тела массой m , поднятого на неко- торую высоту в однородном гравитационном поле Земли. Для этого
i
i i
Ai mgri cos i mghi .
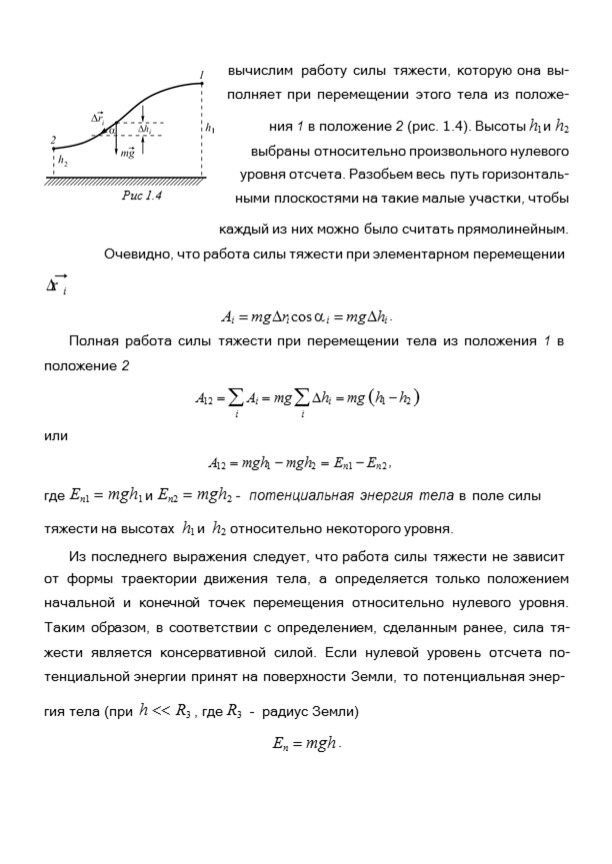
Полная работа силы тяжести при перемещении тела из положения 1 в положение 2
A12 Ai mg hi mg h1 h2
или
A12 mgh1 mgh2 Eп1 Eп 2 ,
где Eп1 mgh1 и Eп2 mgh2 – потенциальная энергия тела в поле силы тяжести на высотах h1 и h2 относительно некоторого уровня.
Из последнего выражения следует, что работа силы тяжести не зависит
от формы траектории движения тела, а определяется только положением начальной и конечной точек перемещения относительно нулевого уровня. Таким образом, в соответствии с определением, сделанным ранее, сила тя- жести является консервативной силой. Если нулевой уровень отсчета по- тенциальной энергии принят на поверхности Земли, то потенциальная энер-
гия тела (при h R3 , где R3 – радиус Земли)
Eп mgh .
вычислим работу силы тяжести, которую она вы- полняет при перемещении этого тела из положе-
ния 1 в положение 2 (рис. 1.4). Высоты h1 и h2 выбраны относительно произвольного нулевого уровня отсчета. Разобьем весь путь горизонталь- ными плоскостями на такие малые участки, чтобы
каждый из них можно было считать прямолинейным.
Очевидно, что работа силы тяжести при элементарном перемещении
r→
Рис 1.4
Потенциальная энергия может быть как положительной, так и отрица- тельной – в зависимости от размещения точки отсчета по отношению к ну- левому уровню. В нашем примере сила тяжести выполняет положительную работу. При этом потенциальная энергия механической системы Земля–тело уменьшается:
A Eп Eп1 Eп 2 .
Как видно из рассмотренного примера, потенциальная энергия механи- ческой системы может быть определена, если указаны взаимное располо- жение тел в системе (координаты тел) и силы, действующие между ними.
Изменение потенциальной энергии системы взаимодействующих тел численно равно работе, выполняемой консервативными силами при перево- де системы без изменения скорости из одного состояния в другое с новым размещением (конфигурацией) тел. Потенциальную энергию одного из со- стояний системы тел условно принимают равной нулю. В этом случае пред- полагают, что тела не взаимодействуют друг с другом. Выбор нулевого уровня отсчета потенциальной энергии произвольный. Поскольку потенци- альная энергия определяется силами, значения которых зависят от вида, взаимодействия и от расстояния между взаимодействующими телами, то единой универсальной формулы, позволяющей определить потенциальную энергию, не существует. Еще раз подчеркнем, что потенциальную энергию имеет физическая система, состоящая как минимум из двух взаимодейст- вующих тел. Если говорят о потенциальной энергии одного тела, то в этом случае понимают энергию, которая определяется взаим-
ным расположением частей этого тела.
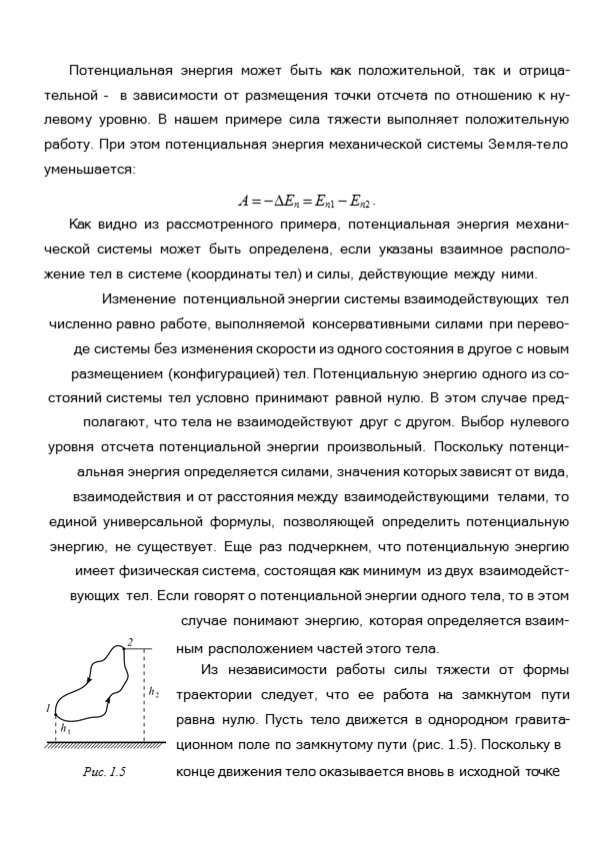
Из независимости работы силы тяжести от формы траектории следует, что ее работа на замкнутом пути равна нулю. Пусть тело движется в однородном гравита- ционном поле по замкнутому пути (рис. 1.5). Поскольку в
Рис. 1.5
конце движения тело оказывается вновь в исходной точке
(например, в точке 2), то
A mgh2 mgh2 0 . Величина потенциальной
энергии зависит от выбора нулевого уровня отсчета, поэтому важно знать не абсолютное значение потенциальной энергии, а ее изменение при переходе механической системы из одного состояния в другое. Если нулевой уровень отсчета выбрать в бесконечности, то потенциальная энергия тела, которое находится в гравитационном поле Земли, всегда будет отрицательна
п
R
E G mM ,
где R – расстояние от центра Земли до тела.
Выясним связь силы с потенциальной энергией. Рассмотрим механиче-
скую систему, в которой действуют только консервативные силы. Элемен- тарная работа консервативной силы, действующей на тело, равна уменьше- нию потенциальной энергии
dA dEп
или
Fs ds dEп .
Отсюда
s
ds
F dEп .
Из полученного соотношения следует, что проекция силы на направление движения тела равна быстроте изменения потенциальной энергии на беско- нечно малом отрезке вдоль этого направления. Знак «минус» в формуле по- казывает, что сила направлена в сторону уменьшения потенциальной энер- гии. Если известна зависимость потенциальной энергии от координат, то можно сделать ряд выводов о характере движения тела.
Заключение:
Движение тел с переменной массой представляет собой увлекательную и важную область физики. Изучение этой темы позволяет более глубоко понять принципы, лежащие в основе современных технологий и научных исследований. Понимание влияния переменной массы на движение тела открывает новые перспективы для развития технологий и применений в различных областях науки и инженерии.
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.