Поделиться

«Кто такие - Роботы. Как они устроены?»
Автор: Нестеров Ярослав
Обучающий МБОУДО ЦДОД
Т/О Робототехника
Руководитель: Пахомова Т.В.
Барабинск 2022г.
Рецензия на исследовательскую работу
Обучающий МБОУДО ЦДОД Т/О Робототехника
Нестерова Ярослава
«Кто такие -Роботы. Как они устроены?»
В представленной научно-исследовательской работе рассмотрены вопросы создания, устройства и значения роботов в современном мире и жизни людей. Содержание работы соответствует заявленной теме и излагается в соответствии с удачно составленным планом.
В разделе «Введение» определена тема, цели и задачи работы, объект исследования, выдвинута гипотеза, а также перечислены методы исследования.
Теоретический материал соответствует теме исследования: описаны различные виды роботов, строение современных роботов. Заслуживает полной поддержки стремление автора основательно разобраться в терминологии.
Особый интерес вызывает исследовательская часть работы. Проведен ряд исследований. Это опрос учащихся. Видно, что ребенок грамотно и с интересом выполнял работу. По результатам опроса сделаны выводы.
Проведена работа по созданию модели робота EV3 и работе сенсорных датчиков.
Выдвинутая гипотеза достаточна грамотно и убедительно подтверждается материалами работы. В процессе исследования применялись теоретические (изучение научно–популярных изданий; работа с интернет-ресурсами), опрос и анкетирование одноклассников и метод конструирования.
Материалы работы дают понять, что исследователь предварительно внимательно изучил теорию по данной теме, а затем на основе изученного провел исследовательскую работу и сделал собственные выводы. К работе выполнена яркая, красочная презентация.
Работа удовлетворяет требованиям, предъявляемым, к ученическим исследовательским работам.
Учитывая сложность предмета исследования, творческий подход и глубину анализа полученного материала, считаю, что работа заслуживает высокой оценки, так как может быть удачно использована на уроках окружающего мира, в работе кружка и на классных часах.
Руководитель: Пахомова Т.В.
Аннотация
В представленной научно-исследовательской работе рассмотрены вопросы создания, устройства и значения роботов в современном мире и жизни людей. Описаны различные виды роботов. Проведена работа по созданию модели робота EV3 и работе сенсорных датчиков.
Оглавление
ВВЕДЕНИЕ……………………………………………………………..……………………5
1.История создания и развития роботов..………….………...…………………………….7
1.1 Эволюция роботов.……………………………………………….............................7
1.2 Происхождение слова робот. Три закона робототехники …...........................11
1.3 Классификация роботов…………………………………………………………..…12
2. Устройство роботов и основные принципы работы..…………………………………….16
2.1Строение современных роботов…………………………………….……………...16
2.2Разработка модели робота EV3………………………………………………..…...17
2.3Результаты анкетирования одноклассников…………………………………......20
ЗАКЛЮЧЕНИЕ…………………………………………………..……………………………2
Список использованных источников информации ……...……………………………....23
ПРИЛОЖЕНИЯ………………………….……………………………………………….....24
Введение
Слово «робот» прочно вошло в современную речь и нашу жизнь. Трудно представить себе мир XXI века без «умных» машин. Они проникли всюду: от заводских цехов и медицины до вооружения наиболее развитых армий мира. И, конечно, редкий фантастический фильм обходится без самостоятельных думающих механизмов, которые известны под термином «робот».
Термин «робот» пришел к нам от чешского слова «robota», что буквально означает «принудительный труд». В принципе, это слово отлично описывает большинство роботов. Чаще всего роботы делают тяжелую работу, монотонно трудятся на производстве. Также они решают задачи, которые сложны, опасны или скучны для людей. Беспилотные самолеты-разведчики, искусственные спутники, знаменитые луноходы – все это роботы. Однако наиболее впечатляющая мечта человечества – человекообразная машина, описанная писателями-фантастами.
Цель данной работы – изучение истории появления роботов, их роли в жизни людей и ознакомление с типовой конструкцией робота.
Объектом исследования послужили роботы в современной жизни людей.
В соответствии с данной целью были поставлены следующие задачи:
Методы исследования: теоретические (изучение научно–популярных изданий; работа с интернет-ресурсами), опрос и анкетирование одноклассников и метод конструирования.
Гипотеза: человек не может обойтись без роботов.
Актуальность: Тема роботов очень интересна. В современном мире телевидение часто показывает программы и фильмы про роботов, в которых они помогают людям в жизни и даже могут вместо человека делать какую-нибудь сложную работу. В жизни мы часто сталкиваемся с роботами. Например, дома у многих есть игрушки на радиоуправлении, у всех есть сотовые телефоны, компьютеры, телевизоры, пылесосы и т.п. Вся эта робототехника во многом помогает и облегчает нашу жизнь.
1.История создания и развития роботов
1.1 Эволюция роботов
Роботы – это помощники человека, которые выполняют работу по заранее заложенной в них программе и могут реагировать на то, что их окружает. С момента своего появления роботы изменились от очень простых механизмов до сложных устройств, во многом превзойдя по своим возможностям человека. Однозначной трактовки термина «робот» нет.
Одно из определений гласит, что робот - это машина с человекоподобным поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром.
Ро́бот (чешское robot, от robota — подневольный труд или rob —раб) — автоматическое устройство, созданное по принципу живого организма. Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет различные операции, выполняемые человеком. При этом робот может иметь связь с оператором (получать от него команды), так и действовать автономно [2].
Идея создания роботов появилась очень давно, еще во времена античности. На протяжении всей истории человечества создавались какие-то механизмы: для выполнения работы, для развлечения, для заработка денег или прости из научного интереса.

Рисунок 1- Робот Леонардо да Винчи
Приблизительно в 1495 г. Леонардо да Винчи спроектировал (а возможно собрал и испытал) механического рыцаря, облачённого в броню, по видимости являющегося первым роботом. Внутри доспехов находился механизм, приводящий в движение искусственного человека при помощи тросов и роликов, создавая иллюзию, что там внутри есть живой человек. Рыцарь-робот умел садиться, двигать головой и руками, анатомически правильно открывать и закрывать рот. Также, он мог имитировать звуки - шёл под сопровождение барабанов.
В дневниках Леонардо появляется набросок суммирующей вычислительной машины на зубчатых колесах, способной складывать 13-разрядные десятичные числа. Его суммирующую машину можно считать изначальной вехой в истории вычислительной техники.
В 1500 году Леонардо да Винчи строит механического льва, который при въезде короля Франции в Милан выдвигался, раздирал когтями грудь и показывал герб Франции [1].
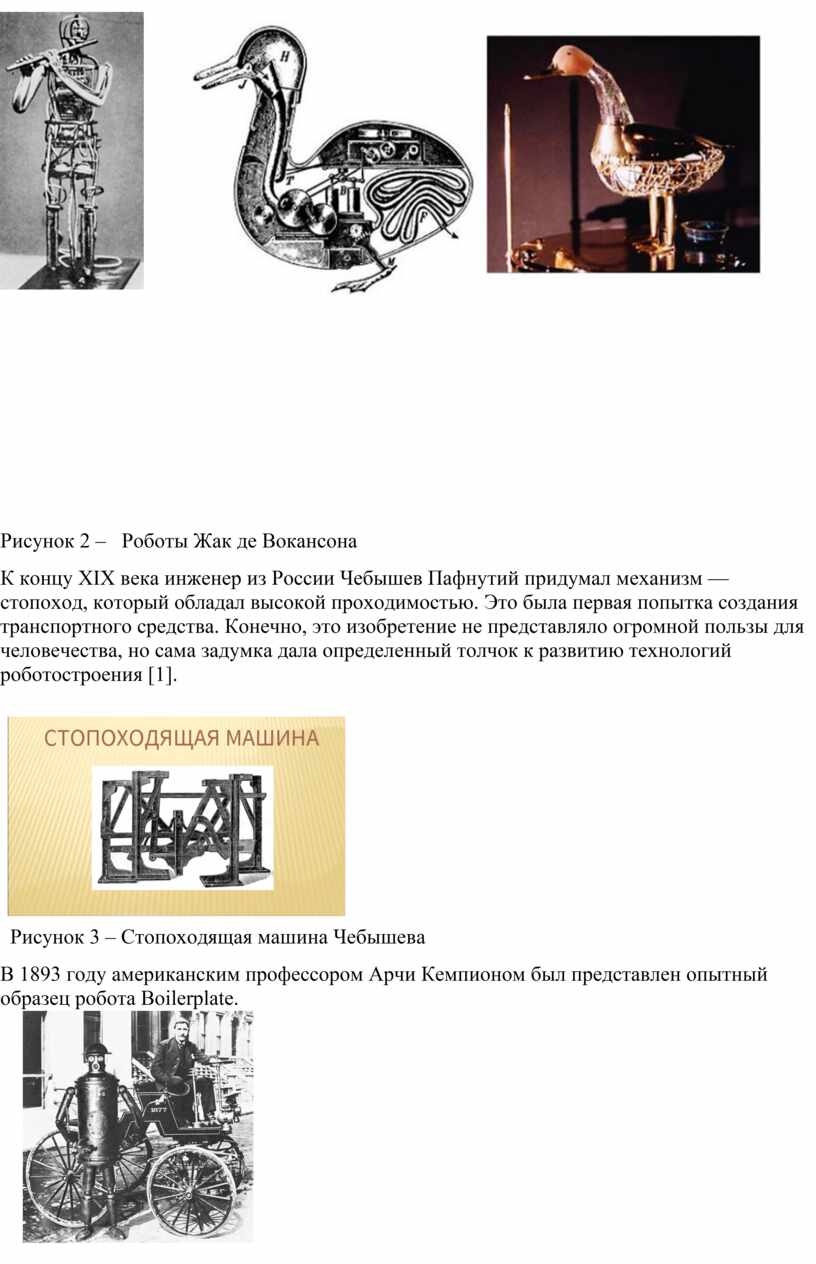
Первого действующего человекоподобного робота создал французский изобретатель Жак де Вокансон в 1737 году. Андроид представлял из себя человека в натуральную величину способного на флейте. Флейтист Вокансона имел в репертуаре 12 произведений.
В том же году на специально организованной выставке демонстрировалась механическая утка, самое завораживающее устройство Вокансона. Механическая птица стояла на пьедестале, крякала, пила воду из чашки, ела зерно и раскрывала и хлопала крыльями! Но и это не все – пища «переваривалась» и затем, как у настоящей птицы, выходила из клоаки «экскрементами» другого цвета.
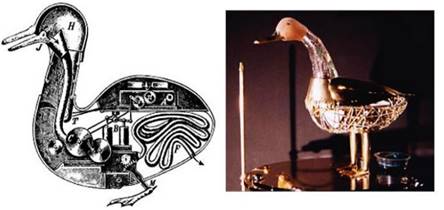

Рисунок 2 – Роботы Жак де Вокансона
К концу XIX века инженер из России Чебышев Пафнутий придумал механизм — стопоход, который обладал высокой проходимостью. Это была первая попытка создания транспортного средства. Конечно, это изобретение не представляло огромной пользы для человечества, но сама задумка дала определенный толчок к развитию технологий роботостроения [1].

Рисунок 3 – Стопоходящая машина Чебышева
 В 1893 году американским профессором Арчи Кемпионом был
представлен опытный образец робота Boilerplate.
В 1893 году американским профессором Арчи Кемпионом был
представлен опытный образец робота Boilerplate.
Рисунок 4 – Boilerplate
Хотя робот существовал в единственном экземпляре, Boilerplate неоднократно участвовал в боевых действиях.
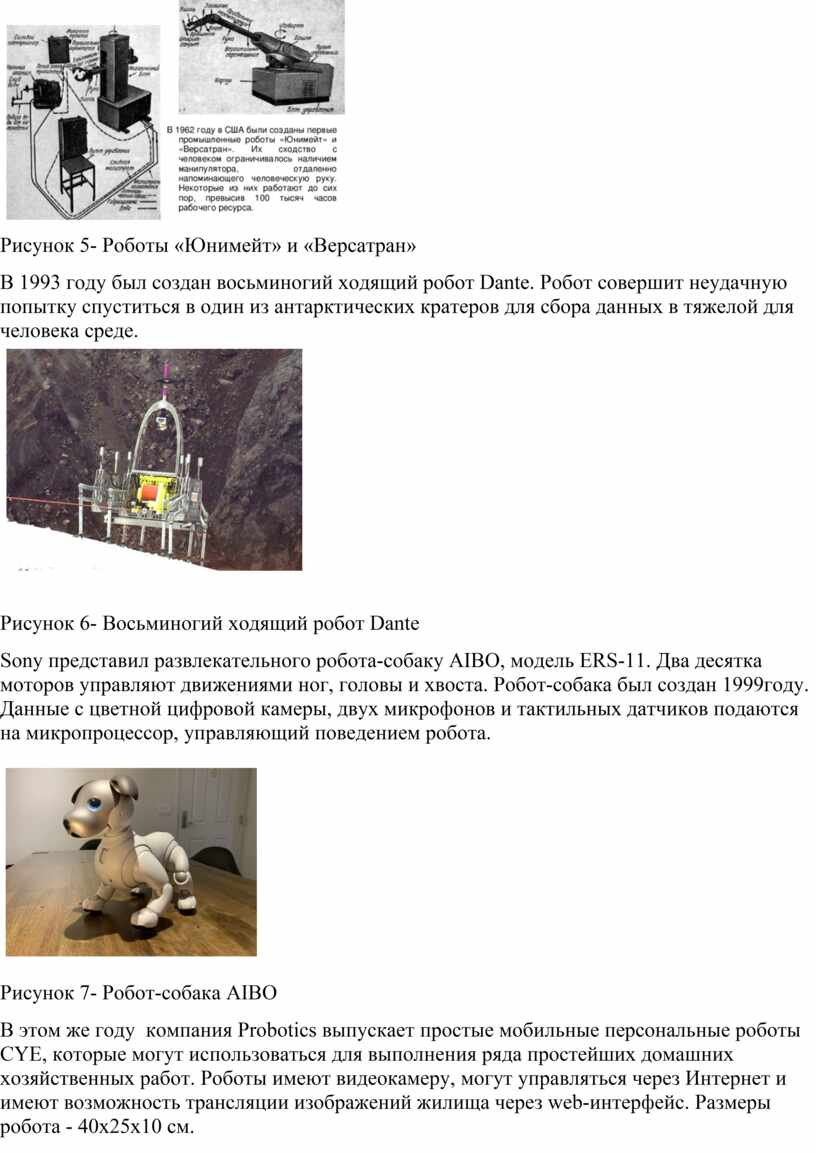
После изобретения в 1940 году компьютера, стали появляться электронные промышленные роботы. Первыми роботами, освободившими человека от трудной и опасной работы, в 1962 году стали роботы «Юнимейт» и «Версатран». Они работали на автомобильном заводе «Дженерал моторс», их работа заключалась в передаче и перемещении горячих деталей после их изготовления.
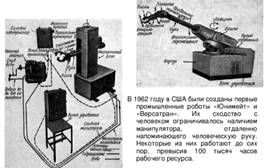
Рисунок 5- Роботы «Юнимейт» и «Версатран»
 В 1993 году был создан восьминогий ходящий робот Dante. Робот
совершит неудачную попытку спуститься в один из антарктических кратеров для
сбора данных в тяжелой для человека среде.
В 1993 году был создан восьминогий ходящий робот Dante. Робот
совершит неудачную попытку спуститься в один из антарктических кратеров для
сбора данных в тяжелой для человека среде.
Рисунок 6- Восьминогий ходящий робот Dante
Sony представил развлекательного робота-собаку AIBO, модель
ERS-11. Два десятка моторов управляют движениями ног, головы и хвоста.
Робот-собака был создан 1999году.
Данные с цветной цифровой камеры, двух микрофонов и тактильных датчиков
подаются на микропроцессор, управляющий поведением робота.

Рисунок 7- Робот-собака AIBO
В этом же году компания Probotics выпускает простые мобильные персональные роботы CYE, которые могут использоваться для выполнения ряда простейших домашних хозяйственных работ. Роботы имеют видеокамеру, могут управляться через Интернет и имеют возможность трансляции изображений жилища через web-интерфейс. Размеры робота - 40x25x10 см.

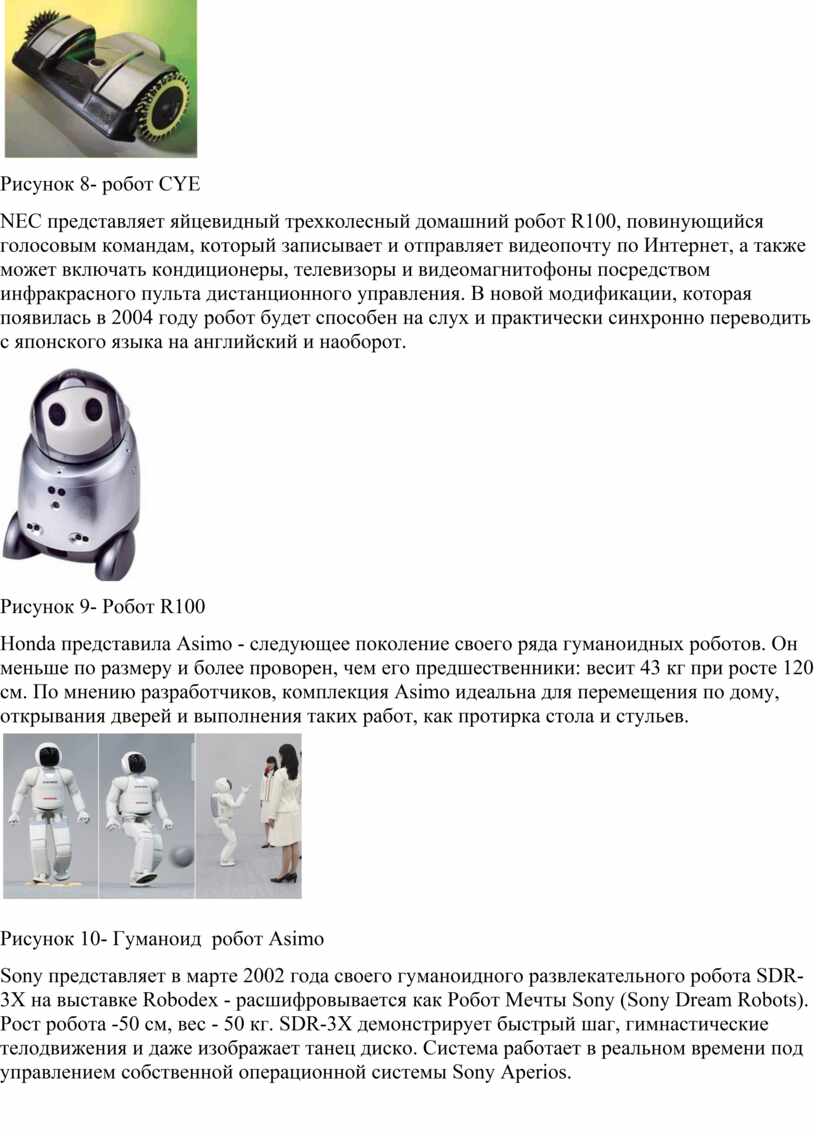
Рисунок 8- робот CYE
NEC представляет яйцевидный трехколесный домашний робот R100, повинующийся голосовым командам, который записывает и отправляет видеопочту по Интернет, а также может включать кондиционеры, телевизоры и видеомагнитофоны посредством инфракрасного пульта дистанционного управления. В новой модификации, которая появилась в 2004 году робот будет способен на слух и практически синхронно переводить с японского языка на английский и наоборот.

Рисунок 9- Робот R100
 Honda
представила Asimo - следующее поколение своего ряда гуманоидных роботов. Он
меньше по размеру и более проворен, чем его предшественники: весит 43 кг при
росте 120 см. По мнению разработчиков, комплекция Asimo идеальна для
перемещения по дому, открывания дверей и выполнения таких работ, как протирка
стола и стульев.
Honda
представила Asimo - следующее поколение своего ряда гуманоидных роботов. Он
меньше по размеру и более проворен, чем его предшественники: весит 43 кг при
росте 120 см. По мнению разработчиков, комплекция Asimo идеальна для
перемещения по дому, открывания дверей и выполнения таких работ, как протирка
стола и стульев.
Рисунок 10- Гуманоид робот Asimo
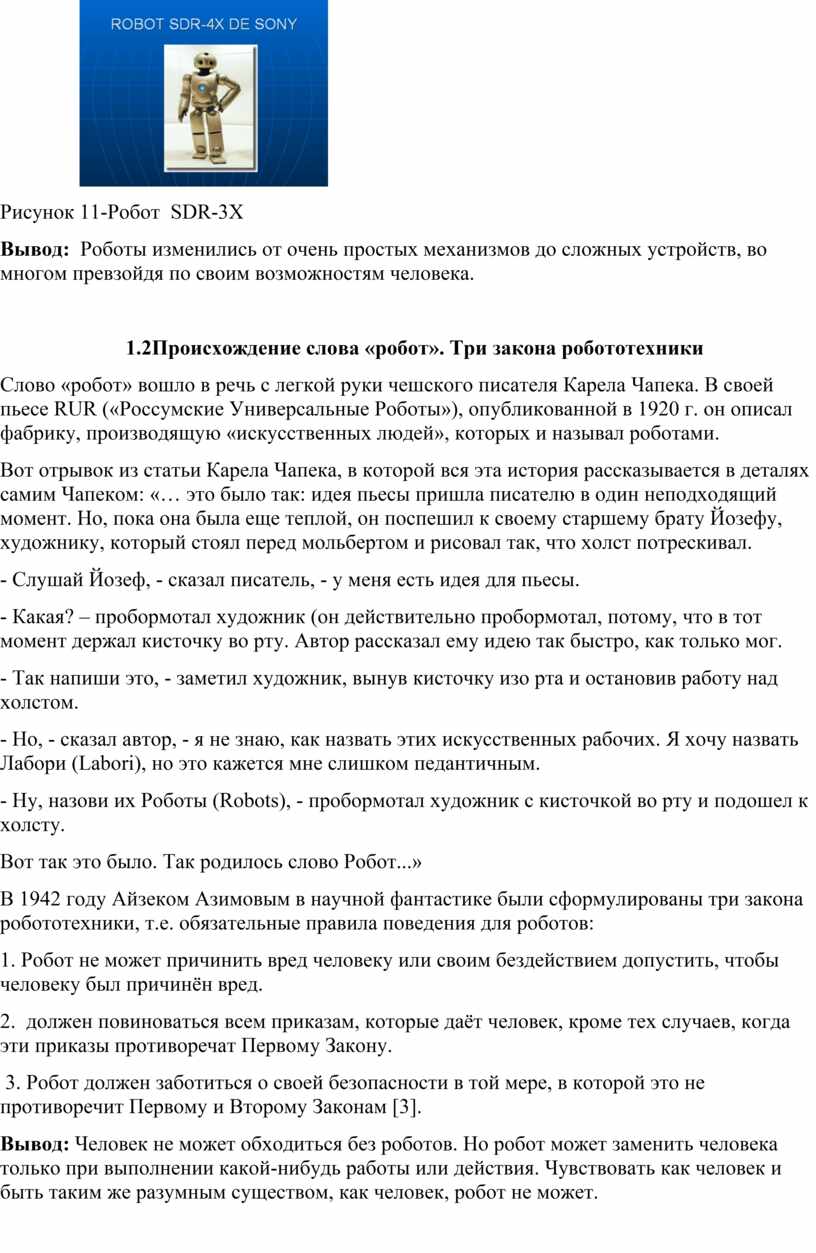
Sony представляет в марте 2002 года своего гуманоидного развлекательного робота SDR-3X на выставке Robodex - расшифровывается как Робот Мечты Sony (Sony Dream Robots). Рост робота -50 см, вес - 50 кг. SDR-3X демонстрирует быстрый шаг, гимнастические телодвижения и даже изображает танец диско. Система работает в реальном времени под управлением собственной операционной системы Sony Aperios.
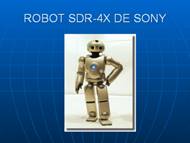
Рисунок 11-Робот SDR-3X
Вывод: Роботы изменились от очень простых механизмов до сложных устройств, во многом превзойдя по своим возможностям человека.
1.2Происхождение слова «робот». Три закона робототехники
Слово «робот» вошло в речь с легкой руки чешского писателя Карела Чапека. В своей пьесе RUR («Россумские Универсальные Роботы»), опубликованной в 1920 г. он описал фабрику, производящую «искусственных людей», которых и называл роботами.
Вот отрывок из статьи Карела Чапека, в которой вся эта история рассказывается в деталях самим Чапеком: «… это было так: идея пьесы пришла писателю в один неподходящий момент. Но, пока она была еще теплой, он поспешил к своему старшему брату Йозефу, художнику, который стоял перед мольбертом и рисовал так, что холст потрескивал.
- Слушай Йозеф, - сказал писатель, - у меня есть идея для пьесы.
- Какая? – пробормотал художник (он действительно пробормотал, потому, что в тот момент держал кисточку во рту. Автор рассказал ему идею так быстро, как только мог.
- Так напиши это, - заметил художник, вынув кисточку изо рта и остановив работу над холстом.
- Но, - сказал автор, - я не знаю, как назвать этих искусственных рабочих. Я хочу назвать Лабори (Labori), но это кажется мне слишком педантичным.
- Ну, назови их Роботы (Robots), - пробормотал художник с кисточкой во рту и подошел к холсту.
Вот так это было. Так родилось слово Робот...»
В 1942 году Айзеком Азимовым в научной фантастике были сформулированы три закона робототехники, т.е. обязательные правила поведения для роботов:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
2. должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
3. Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам [3].
Вывод: Человек не может обходиться без роботов. Но робот может заменить человека только при выполнении какой-нибудь работы или действия. Чувствовать как человек и быть таким же разумным существом, как человек, робот не может.
1.3 Классификация роботов
Так же как и с понятием «робот», в отношении классификации роботов не существует общепринятого мнения, из-за чего в разных изданиях, а также интернет-ресурсах, посвященных робототехнике, можно встретить различные классификации.
Связано это с тем, что по мере развития робототехнического направления промышленности видоизменяются сами машины, их функции постоянно расширяются и неизбежен регулярный пересмотр их разновидностей. Наиболее целесообразно разбиение всех видов роботов на группы по типу выполняемой работы или решаемой задачи, например: промышленные, строительные, сельскохозяйственные, транспортные, бытовые, боевые, охранные, исследовательские.
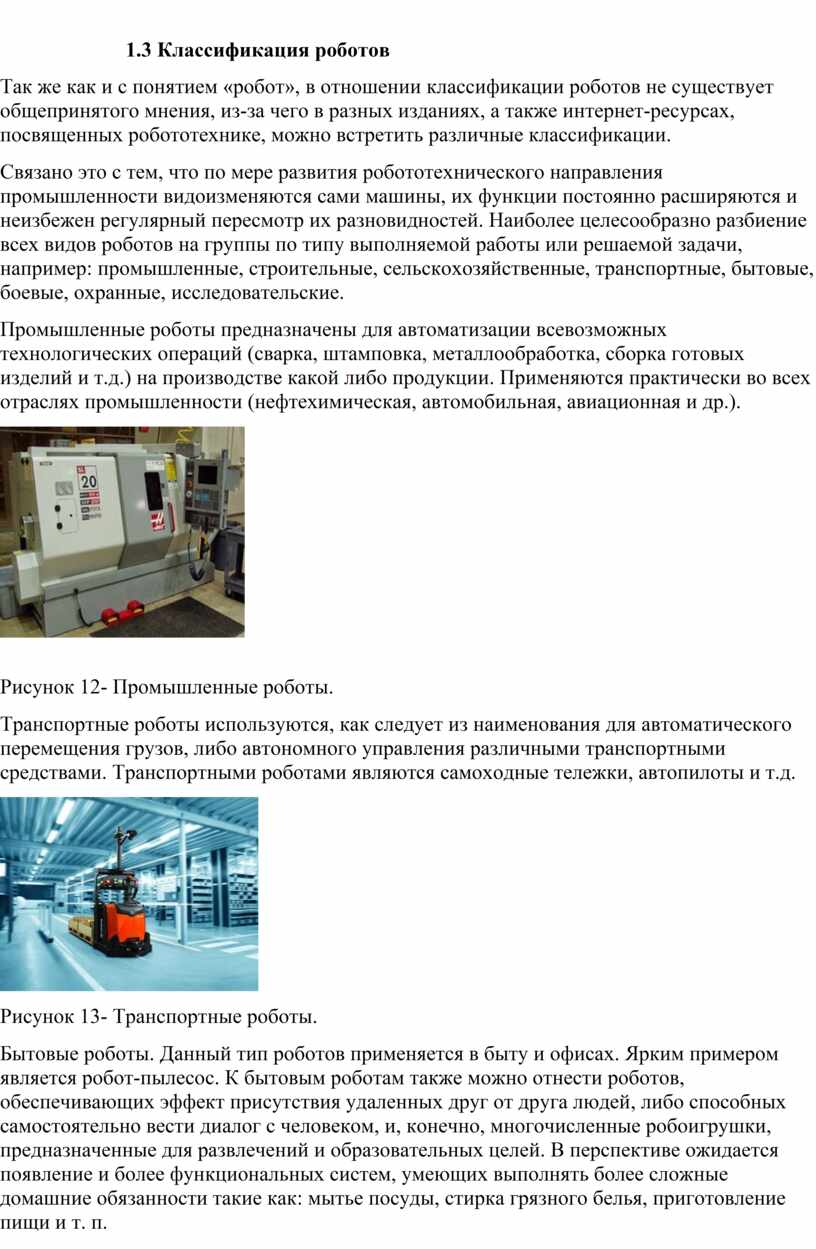
Промышленные роботы предназначены для автоматизации всевозможных технологических операций (сварка, штамповка, металлообработка, сборка готовых изделий и т.д.) на производстве какой либо продукции. Применяются практически во всех отраслях промышленности (нефтехимическая, автомобильная, авиационная и др.).

Рисунок 12- Промышленные роботы.
Транспортные роботы используются, как следует из наименования для автоматического перемещения грузов, либо автономного управления различными транспортными средствами. Транспортными роботами являются самоходные тележки, автопилоты и т.д.

Рисунок 13- Транспортные роботы.
Бытовые роботы. Данный тип роботов применяется в быту и офисах. Ярким примером является робот-пылесос. К бытовым роботам также можно отнести роботов, обеспечивающих эффект присутствия удаленных друг от друга людей, либо способных самостоятельно вести диалог с человеком, и, конечно, многочисленные робоигрушки, предназначенные для развлечений и образовательных целей. В перспективе ожидается появление и более функциональных систем, умеющих выполнять более сложные домашние обязанности такие как: мытье посуды, стирка грязного белья, приготовление пищи и т. п.



Рисунок 14 – Бытовые роботы.
 Боевые
(военные) роботы предназначены для минимизации участия человека в боевых
действиях с целью сокращения или исключения вовсе людских потерь, а также для
работы в условиях, несовместимых с возможностями человека в военных целях.
Разновидностей боевых роботов столько же, сколько и боевых задач для войсковых
подразделений: беспилотные с дистанционным управлением самолеты (вертолеты) —
разведчики, подводные аппараты и надводные корабли, роботы-минеры,
роботы-саперы, роботы-патрульные, роботы для переноски военной амуниции.
Боевые
(военные) роботы предназначены для минимизации участия человека в боевых
действиях с целью сокращения или исключения вовсе людских потерь, а также для
работы в условиях, несовместимых с возможностями человека в военных целях.
Разновидностей боевых роботов столько же, сколько и боевых задач для войсковых
подразделений: беспилотные с дистанционным управлением самолеты (вертолеты) —
разведчики, подводные аппараты и надводные корабли, роботы-минеры,
роботы-саперы, роботы-патрульные, роботы для переноски военной амуниции.



Рисунок 15- Военные роботы.
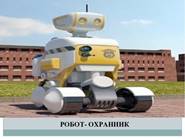 Перед
охранными роботами ставятся задачи по защите территорий или помещений.
Большинство людей не замечают, что рядом с ними повсюду действуют
роботы-полицейские, роботы-охранники и роботы-шпионы. Роботы охраняют важные
объекты и добывают секретную информацию о террористах. Роботы-охранники в
отличие от охранника-человека могут работать 24 часа в сутки без сна, еды и воды,
их трудно отвлечь, и они могут поднять тревогу, если на них совершено
нападение.
Перед
охранными роботами ставятся задачи по защите территорий или помещений.
Большинство людей не замечают, что рядом с ними повсюду действуют
роботы-полицейские, роботы-охранники и роботы-шпионы. Роботы охраняют важные
объекты и добывают секретную информацию о террористах. Роботы-охранники в
отличие от охранника-человека могут работать 24 часа в сутки без сна, еды и воды,
их трудно отвлечь, и они могут поднять тревогу, если на них совершено
нападение.
Рисунок 16- Робот-охранник.
 Робот-шпион
«Сайфор» очень похож на летающую тарелку и имеет форму двухметрового бублика.
Он может зависнуть в воздухе напротив окна высотного здания, посмотреть, что
происходит в помещении, может сбросить подслушивающее оборудование.
Робот-шпион
«Сайфор» очень похож на летающую тарелку и имеет форму двухметрового бублика.
Он может зависнуть в воздухе напротив окна высотного здания, посмотреть, что
происходит в помещении, может сбросить подслушивающее оборудование.
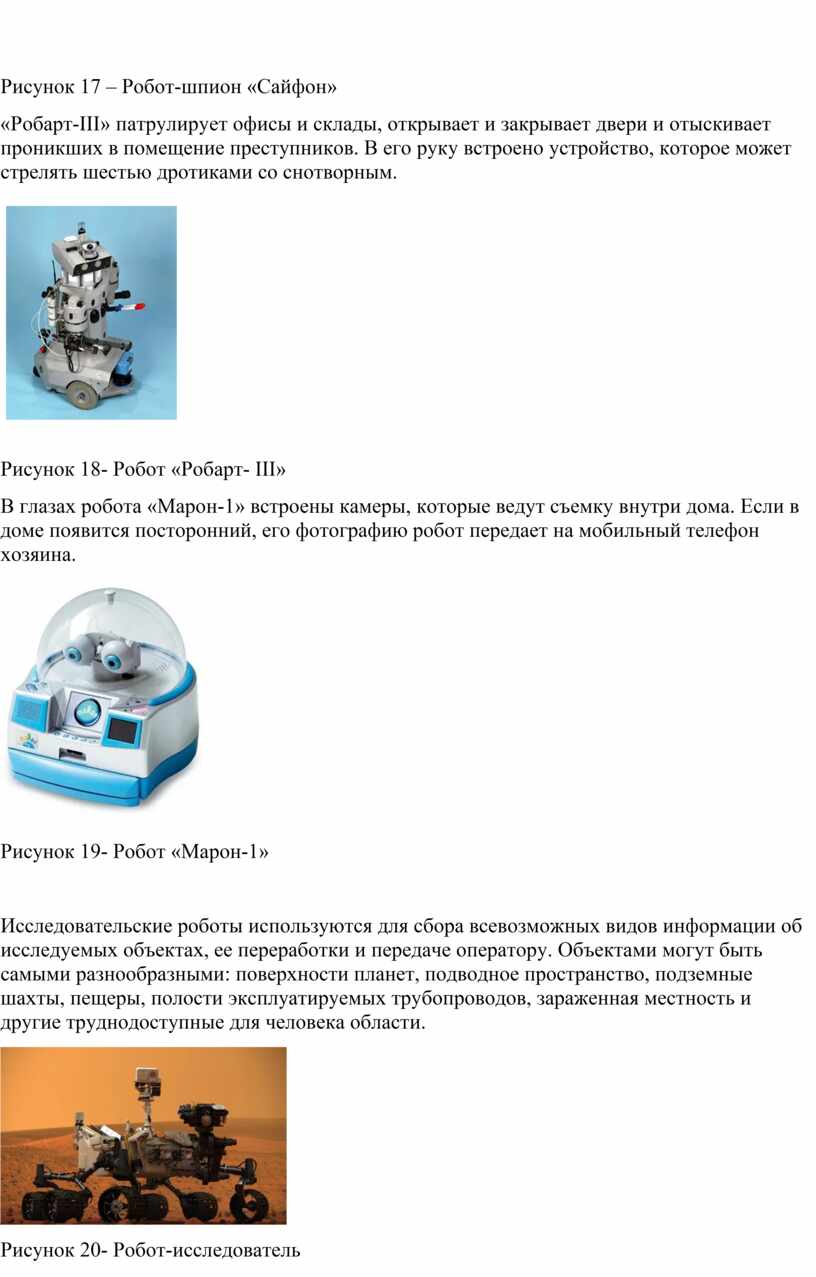
Рисунок 17 – Робот-шпион «Сайфон»
 «Робарт-III»
патрулирует офисы и склады, открывает и закрывает двери и отыскивает проникших
в помещение преступников. В его руку встроено устройство, которое может
стрелять шестью дротиками со снотворным.
«Робарт-III»
патрулирует офисы и склады, открывает и закрывает двери и отыскивает проникших
в помещение преступников. В его руку встроено устройство, которое может
стрелять шестью дротиками со снотворным.
Рисунок 18- Робот «Робарт- III»
В глазах робота «Марон-1» встроены камеры, которые ведут съемку внутри дома. Если в доме появится посторонний, его фотографию робот передает на мобильный телефон хозяина.

Рисунок 19- Робот «Марон-1»
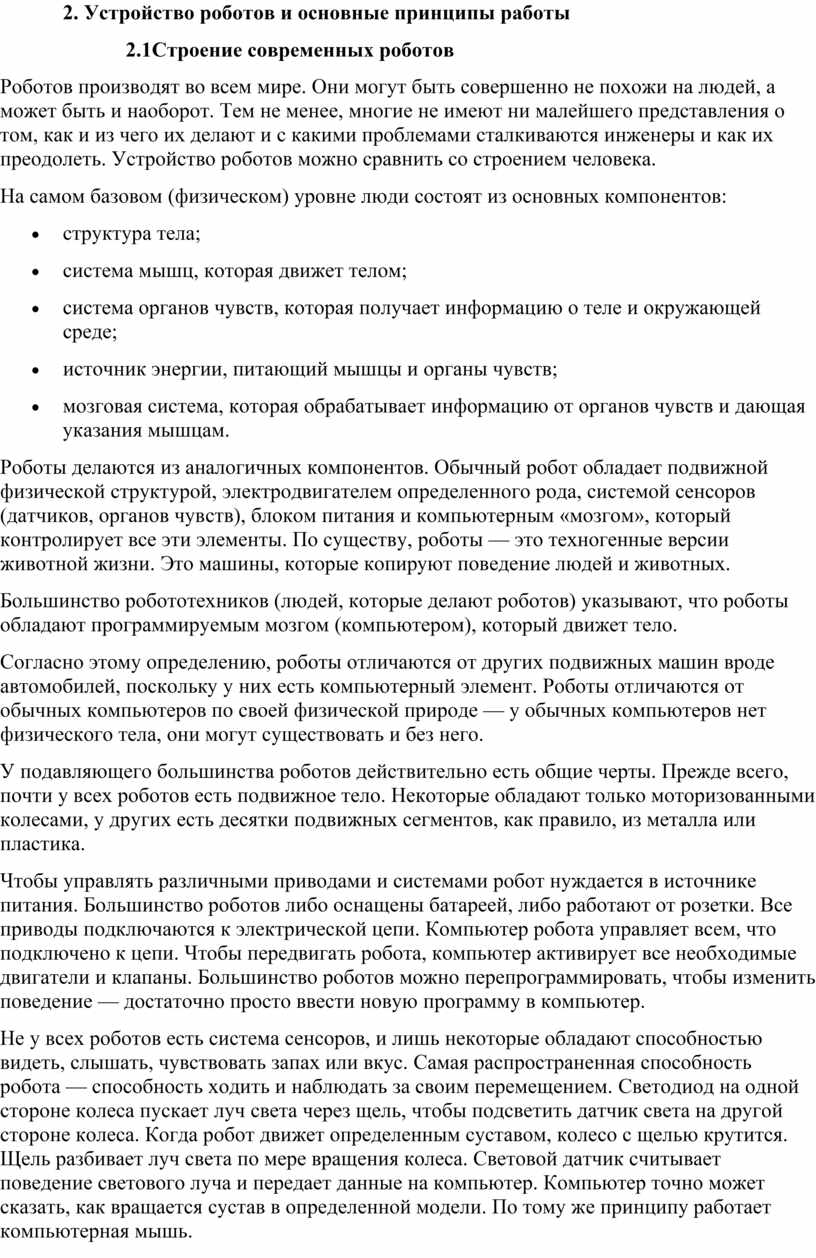
Исследовательские роботы используются для сбора всевозможных видов информации об исследуемых объектах, ее переработки и передаче оператору. Объектами могут быть самыми разнообразными: поверхности планет, подводное пространство, подземные шахты, пещеры, полости эксплуатируемых трубопроводов, зараженная местность и другие труднодоступные для человека области.

Рисунок 20- Робот-исследователь
 Люди
отправляют роботов в космос для исследования космического пространства.
Например, робот «Соджорнер» был первым роботом-вездеходом, оказавшимся на
поверхности Марса. Отсутствие на Марсе кислорода, воды и высокая температура
(до 100 градусов) затрудняют исследование этой планеты людьми. Поэтому люди
поручили исследование Марса роботам-марсоходам. Такие роботы оборудованы
различными сенсорами, инструментами и манипулятором при помощи которых
марсоходы могут убирать с пути тяжелые камни и исследовать почву планеты.
Люди
отправляют роботов в космос для исследования космического пространства.
Например, робот «Соджорнер» был первым роботом-вездеходом, оказавшимся на
поверхности Марса. Отсутствие на Марсе кислорода, воды и высокая температура
(до 100 градусов) затрудняют исследование этой планеты людьми. Поэтому люди
поручили исследование Марса роботам-марсоходам. Такие роботы оборудованы
различными сенсорами, инструментами и манипулятором при помощи которых
марсоходы могут убирать с пути тяжелые камни и исследовать почву планеты.
Рисунок 21- Робот «Соджорнер»
Современные мобильные роботы работают во вредных или опасных для человека условиях, т.к. использование мобильных роботов в таких условиях позволяет человеку не рисковать своей жизнью и здоровьем.
Роботы участвуют в операциях по спасению людей при катастрофах, обезвреживают взрывные устройства, отыскивают места утечки опасных газов, чтобы не произошел взрыв. Например, робот - «змея» может двигаться внутри газовой трубы. Его видеокамеры и датчики отыскивают места поломки трубопровода и места утечки газа. Промышленный робот «Рози» помогал людям разбирать сломавшийся ядерный реактор.

Рисунок 22-Робот-«змея».
Человек не может выполнять работу на большой глубине из-за того, что давление воды погубит человека, ведь на глубине свыше 2-х километров давление воды может раздавить даже корпус подводной лодки. Поэтому для подводных работ роботов делают из титана и других сверхпрочных материалов. Подводные роботы, такие как «Супер-Ахиллес» и «Зевс» обследуют обломки затонувших кораблей и самолетов, отыскивают и поднимают на поверхность «черные» ящики, ценные вещи и изучают подводный мир.

Рисунок 23- Подводные роботы.
Для обнаружения и обезвреживания взрывчатки существуют роботы-саперы, оборудованные специальными видеоустройствами. Такие роботы передают изображение взрывных устройств человеку, находящемуся на безопасном расстоянии. Рука робота может безопасно для находящихся вблизи взрывчатки людей захватить бомбу, переместить её в специальный контейнер, чтобы избежать взрыва.

Рисунок 24 – Робот-снайпер.
Однако «заветной» целью исследователей является создание робота подобного человеку с развитым искусственным интеллектом. Но человек – это очень сложное существо. Человек может чувствовать, выражать эмоции, такие как радость, гнев, грусть, страх и другие. Человек обладает мощным мозгом, совершает множество движений. Поэтому машине – роботу очень сложно повторить человека, робот не может быть таким, как человек.
Ученые-исследователи всего мира работают над созданием роботов похожих на людей. Например, есть робот – партнёр для танцев, который реагирует на перемещения человека и копирует движения тела и рук человека.
«АСИМО» стал первым человекоподобным роботом. Он может свободно ходить, огибать углы, подниматься и спускаться по лестнице. Главный секрет этого робота – в рюкзаке за спиной, в котором находятся мощные компьютеры, управляющие роботом. «АСИМО» умеет реагировать на голосовые команды, танцевать, узнавать человеческие лица, бить по футбольному мячу и бегать по кругу.

Рисунок 25- «АСИМО»
Вывод: Роботы в современном мире везде. Они в любом группе и любой разновидности производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих — они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
2. Устройство роботов и основные принципы работы
2.1Строение современных роботов
Роботов производят во всем мире. Они могут быть совершенно не похожи на людей, а может быть и наоборот. Тем не менее, многие не имеют ни малейшего представления о том, как и из чего их делают и с какими проблемами сталкиваются инженеры и как их преодолеть. Устройство роботов можно сравнить со строением человека.
На самом базовом (физическом) уровне люди состоят из основных компонентов:
Роботы делаются из аналогичных компонентов. Обычный робот обладает подвижной физической структурой, электродвигателем определенного рода, системой сенсоров (датчиков, органов чувств), блоком питания и компьютерным «мозгом», который контролирует все эти элементы. По существу, роботы — это техногенные версии животной жизни. Это машины, которые копируют поведение людей и животных.
Большинство робототехников (людей, которые делают роботов) указывают, что роботы обладают программируемым мозгом (компьютером), который движет тело.
Согласно этому определению, роботы отличаются от других подвижных машин вроде автомобилей, поскольку у них есть компьютерный элемент. Роботы отличаются от обычных компьютеров по своей физической природе — у обычных компьютеров нет физического тела, они могут существовать и без него.
У подавляющего большинства роботов действительно есть общие черты. Прежде всего, почти у всех роботов есть подвижное тело. Некоторые обладают только моторизованными колесами, у других есть десятки подвижных сегментов, как правило, из металла или пластика.
Чтобы управлять различными приводами и системами робот нуждается в источнике питания. Большинство роботов либо оснащены батареей, либо работают от розетки. Все приводы подключаются к электрической цепи. Компьютер робота управляет всем, что подключено к цепи. Чтобы передвигать робота, компьютер активирует все необходимые двигатели и клапаны. Большинство роботов можно перепрограммировать, чтобы изменить поведение — достаточно просто ввести новую программу в компьютер.
Не у всех роботов есть система сенсоров, и лишь некоторые обладают способностью видеть, слышать, чувствовать запах или вкус. Самая распространенная способность робота — способность ходить и наблюдать за своим перемещением. Светодиод на одной стороне колеса пускает луч света через щель, чтобы подсветить датчик света на другой стороне колеса. Когда робот движет определенным суставом, колесо с щелью крутится. Щель разбивает луч света по мере вращения колеса. Световой датчик считывает поведение светового луча и передает данные на компьютер. Компьютер точно может сказать, как вращается сустав в определенной модели. По тому же принципу работает компьютерная мышь.
Это основы робототехники. Робототехники могут комбинировать эти элементы в бесконечное число способов создания роботов неограниченной сложности.
Вывод: Роботы отличаются от обычных компьютеров по своей физической природе — у обычных компьютеров нет физического тела, они могут существовать и без него.
2.2 Разработка модели робота EV3
Для практического ознакомления с конструкцией и принципами работы роботов я принял решение создать модель Lego-робота с сенсорными датчиками и возможностью передвижения в пространстве. Lego-робот помогает понять основы робототехники, наглядно реализовать сложные алгоритмы, рассмотреть вопросы, связанные с автоматизацией различных процессов.
В качестве платформы для создания робота я использовал конструктор Lego Mindstorms EV3. Для создания программы, по которой будет действовать модель, используется специальный графический язык программирования.
Серия LEGO Mindstorms была впервые представлена в 1998 году. Через 8 лет (в 2006) на свет появился набор LEGO Mindstorms NXT 1.0, а уже в 2009 — набор LEGO Mindstorms NXT 2.0. LEGO Mindstorms EV3 – последнее (третье) поколение конструктора, который был представлен почти год назад, 4 января 2013 года [5].
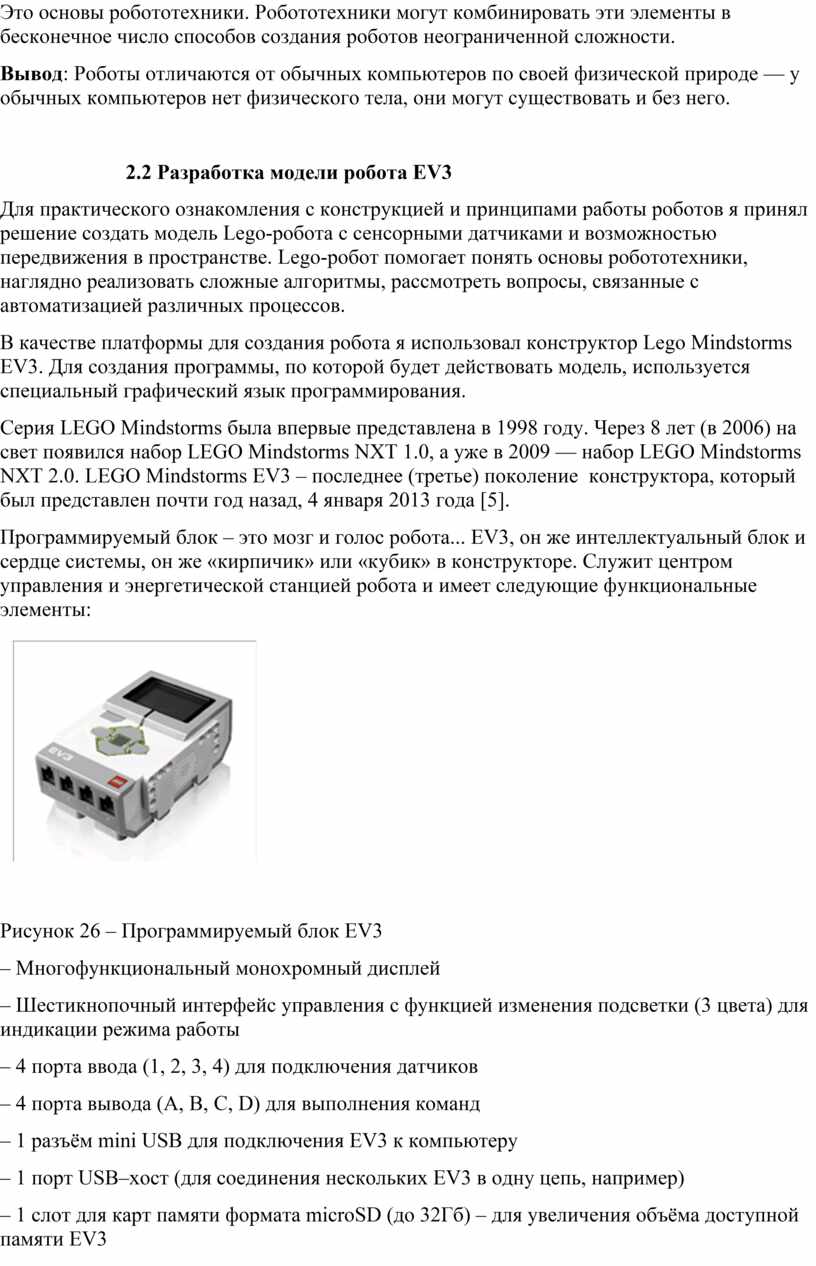
Программируемый блок – это мозг и голос робота... EV3, он же интеллектуальный блок и сердце системы, он же «кирпичик» или «кубик» в конструкторе. Служит центром управления и энергетической станцией робота и имеет следующие функциональные элементы:

Рисунок 26 – Программируемый блок EV3
– Многофункциональный монохромный дисплей
– Шестикнопочный интерфейс управления с функцией изменения подсветки (3 цвета) для индикации режима работы
– 4 порта ввода (1, 2, 3, 4) для подключения датчиков
– 4 порта вывода (A, B, C, D) для выполнения команд
– 1 разъём mini USB для подключения EV3 к компьютеру
– 1 порт USB–хост (для соединения нескольких EV3 в одну цепь, например)
– 1 слот для карт памяти формата microSD (до 32Гб) – для увеличения объёма доступной памяти EV3
– Встроенный динамик
Кубик EV3 также поддерживает Bluetooth, WiFi для связи с компьютерами.
 Большой
EV3-сервомотор имеет встроенный датчик вращения с точностью измерений до 1
градуса. Используя этот датчик, мотор может соединяться другими моторами,
позволяя роботу двигаться с постоянной скоростью. Кроме того, датчик вращения
может использоваться и при проведении различных экспериментов для точного
считывания данных о расстоянии и скорости. Средний EV3-сервомотор. Идеален
для задач, когда скорость и быстрота отклика, а также размер робота важнее его
грузоподъёмности.
Большой
EV3-сервомотор имеет встроенный датчик вращения с точностью измерений до 1
градуса. Используя этот датчик, мотор может соединяться другими моторами,
позволяя роботу двигаться с постоянной скоростью. Кроме того, датчик вращения
может использоваться и при проведении различных экспериментов для точного
считывания данных о расстоянии и скорости. Средний EV3-сервомотор. Идеален
для задач, когда скорость и быстрота отклика, а также размер робота важнее его
грузоподъёмности.

Рисунок 27– Большой (слева) и средний (справа) сервомоторы
Датчик касания (EV3) - позволяет роботу реагировать на касания, распознает три ситуации: прикосновение, щелчок и освобождение.


Рисунок 28 – Датчик касания (слева) и цифровой ИК-датчик (справа)
Цифровой ИК-датчик (EV3). Для определения приближения робота. Также способен улавливать ИК-сигналы от ИК-маяка, позволяя создавать дистанционно управляемых роботов, навигационные системы для преодоления препятствий.
– Измерения приближения или удаления в радиусе 50-70 см
– Радиус улавливания ИК-сигналов до 2 метров
– До 4 индивидуальных каналов приёма сигнала
– Получение удаленных ИК-команд управления
Процесс сборки робота оказался увлекательным, так как в данной модели робота были не только детали набора LEGO Mindstorms и было несколько датчиков. Запрограммировали собранного робота с помощью компьютера. В результате собрана модель, которая может самостоятельно двигаться: вперёд-назад, поворот, разворот на месте, определять кубик (объект), захватывать его и перемещать объект в заданное место (перевозить груз).
В результате данной работы:
- собрана модель робота EV3;
- используя графический язык программирования разработана программа, использующая основные алгоритмические структуры: линейную, цикл;
- получены знания и умения о настройке команд и практическом использовании датчиков.
Рисунок 29 – Собранная модель робота EV3
Вывод: Изучив принцип работы робота и среду его программирования, можно изготовить простейший робот своими руками. То есть гипотеза подтвердилась, цель и задачи проекта выполнены.
2.3. Результаты анкетирования одноклассников
В процессе научно-исследовательской работы я предложил одноклассникам ответить на несколько вопросов по теме «Роботы» (приложение 1). В анкетировании участвовали 25 человек. Целью анкетирования было определения знаний ребят о роботах и робототехнике.По результатам анкетирования выяснилось: абсолютно все одноклассники знают, что в жизни нас окружают роботы, они нужны людям и могут выполнять вместо людей различную работу. Однако ребята знают только о роботах - помощниках в быту и производстве. На вопрос, какие роботы есть в вашей жизни, большинство ответили о наличии игрушек на пульте управления, домашней техники (микроволновка, стиральная машина и т.д.). Кроме того, все ребята указали на основную составляющую роботов – наличие программ и датчиков.
24 человека из опрошенных считают, что основное предназначение роботов – это помощь людям и только 1 человек указал, что роботы призваны защищать людей.
Значительно разделились мнения ребят в объяснении своей позиции при ответе на вопрос: «Может ли робот заменить человека?»
Может ли робот заменить человека?
Рисунок 9 – Результаты анкетирования учащихся
Действительно, если рассуждать: может ли робот заменить человека при выполнении определенной работы, то логичен ответ – «Да» - робот может заменить человека. А если рассуждать с точки зрения: может ли робот заменить человека как живое существо, тогда ответ будет – «Нет», потому что человек - сложный живой организм, обладающий разумом, способный испытывать различные чувства: любовь, радость, грусть, ответственность и т.д.
Заключение
В настоящее время благодаря стремительному развитию вычислительной техники и, как следствие, заметному росту «интеллектуальных» возможностей роботов произошло их внедрение во многие сферы человеческой деятельности. Роботы побывали в таких местах, куда не может попасть ни один человек, выполнили сложнейшие задания, которые не под силу выполнить человеку, и изменили жизнь многих людей. И это только начало! В самом ближайшем будущем появятся новые, еще более удивительные роботы!
Анкетирование одноклассников показало, что мы ежедневно сталкиваемся с разнообразными вариантами робототехники, однако не задумываемся о значении роботов и их устройстве.
В результате написания научно-исследовательской работы стало очевидно, что умные машины нужны повсюду. Они приносят много пользы, сплошь и рядом они готовы заменить человека. Ведь наши физические возможности ограничены, а умная машина — робот — со многими задачами справляется лучше человека.
Я пришел к выводу, что человек не может обходиться без роботов. Но робот может заменить человека только при выполнении какой-нибудь работы или действия. Чувствовать как человек и быть таким же разумным существом, как человек, робот не может.
Возможно, что в будущем появятся такие роботы, которые внешне будут очень привлекательны - похожи на людей и будут ежедневно приносить огромную пользу людям.
Список использованных источников информации
[Электронный ресурс] - http://www.scienceforum.ru/2013/
http://geektimes.ru/company/ulmart/blog/242809/
Приложение 1
Вопросы для анкетирования учащихся на тему «Роботы»
(подчеркните или обведите ваш вариант ответа):
- да,
- нет
- чтобы помогать людям,
- чтобы навредить людям,
- чтобы защищать людей,
__________________________________________________________________________________________________________________________________________________________
(свой вариант ответа)
- может,
- не может
- может,
- не может
- может,
- не может
Объясните почему____________________________________________________________
__________________________________________________________________________________________________________________________________________________________
(напишите) _______________________________________________________________________________________________________________________________________________________________________________________________________________________________________
_________________________________________________________________________________________________________________________________________________________________________________________________________________________________


![При этом робот может иметь связь с оператором (получать от него команды), так и действовать автономно [2]](https://fs.znanio.ru/d5af0e/cb/39/84c41b2f4986288b12907f55a4b6e1f7eb.jpg)








Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.