Поделиться

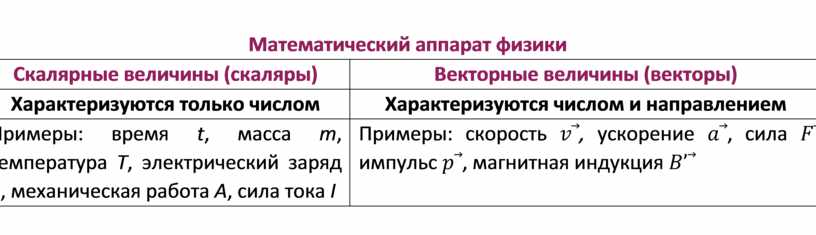
Математический аппарат физики
|
Скалярные величины (скаляры) |
Векторные величины (векторы) |
|
Характеризуются только числом |
Характеризуются числом и направлением |
|
Примеры: время t, масса m, температура Т, электрический заряд q, механическая работа А, сила тока I |
Примеры: скорость 𝑣⃗, ускорение 𝑎⃗, сила 𝐹⃗, импульс 𝑝⃗, магнитная индукция 𝐵’⃗ |
|
Скалярные величины могут быть положительными и отрицательными. Складываются алгебраически.
Пример: определить полный заряд системы, если 𝑞! = 2 нКл, 𝑞" = − 7 нКл и 𝑞# = 3 нКл. Заряд – скалярная величина, поэтому полный заряд системы: 𝑞 = 𝑞! + 𝑞" + 𝑞# = +2 нКл + + (−7 нКл) + 3 нКл = − 2 нКл.
|
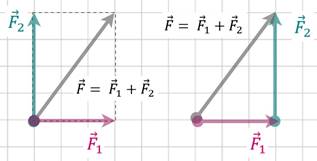
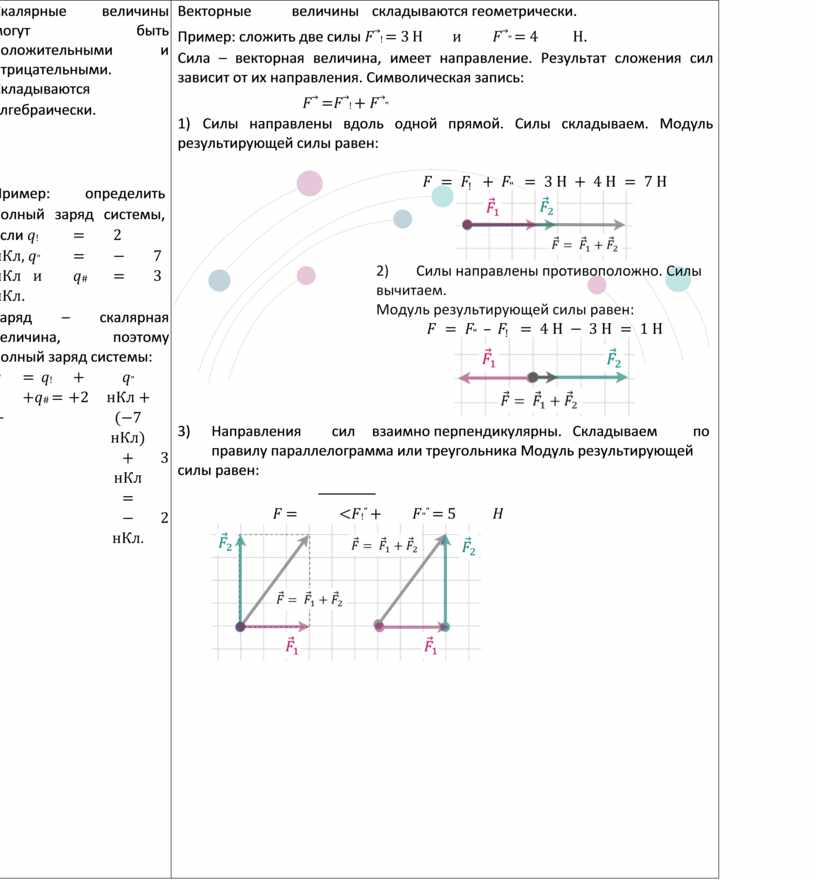
Векторные величины складываются геометрически. Пример: сложить две силы 𝐹⃗! = 3 Н и 𝐹⃗" = 4 Н. Сила – векторная величина, имеет направление. Результат сложения сил зависит от их направления. Символическая запись: 𝐹⃗ = 𝐹⃗! + 𝐹⃗"
3) Направления сил взаимно перпендикулярны. Складываем по правилу параллелограмма или треугольника Модуль результирующей силы равен:
𝐹 = <𝐹!" + 𝐹"" = 5 𝐻
|
Вектора не всегда расположены «удобно» и производить вышеперечисленные действия с ними бывает трудоёмко. Поэтому действия с векторами сводят к действиям с положительными и отрицательными числами – проекциями векторов.
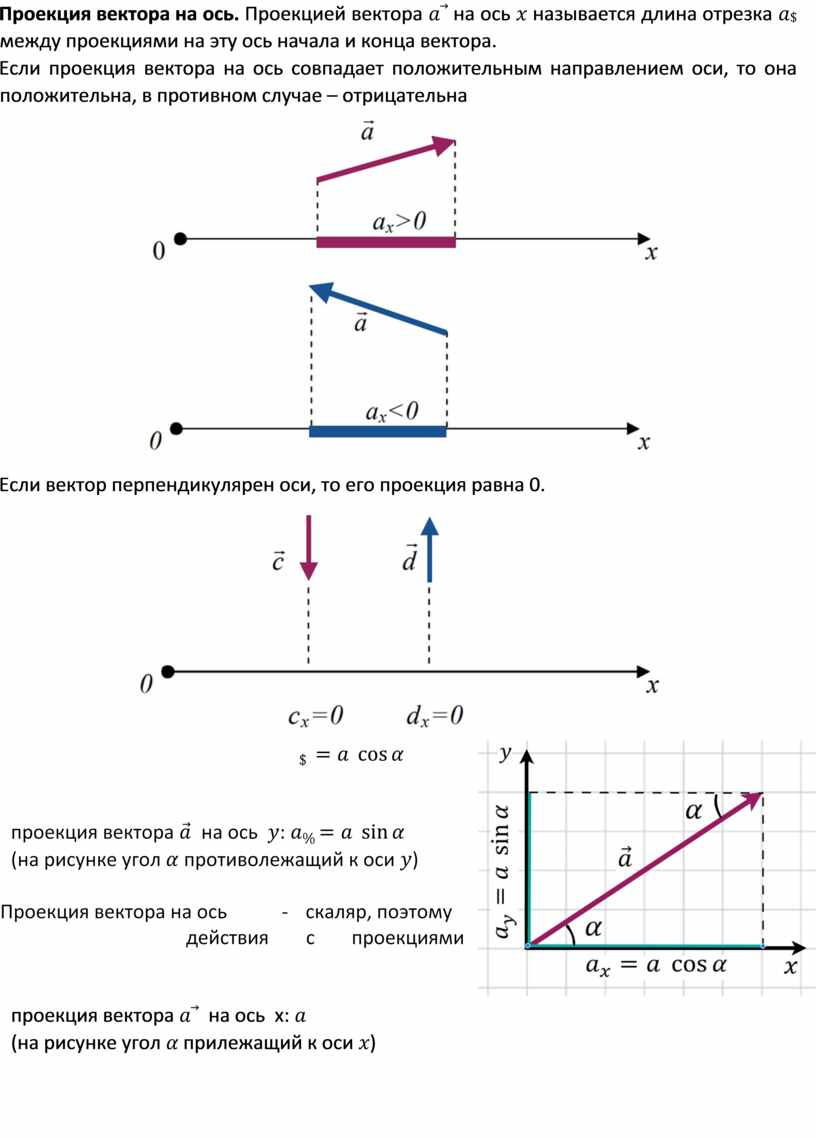
Проекция вектора на ось. Проекцией вектора 𝑎⃗ на ось 𝑥 называется длина отрезка 𝑎$ между проекциями на эту ось начала и конца вектора.
Если проекция вектора на ось совпадает положительным направлением оси, то она положительна, в противном случае – отрицательна
Если вектор перпендикулярен оси, то его проекция равна 0.
 проекция вектора 𝑎⃗ на ось х: 𝑎
проекция вектора 𝑎⃗ на ось х: 𝑎
(на рисунке угол 𝛼 прилежащий к оси 𝑥)
математические производятся алгебраически.
Основные понятия механики
Механика — это раздел физики, изучающий механическое движение тел.
Основная задача механики — определить положение тела в пространстве в любой момент времени.
Кинематика — это раздел механики, в котором изучается механическое движение тел без учета причин, вызывающих это движение (не рассматриваются силы).
Механическое движение - изменение положения тела в пространстве относительно других тел с течением времени.
Механическое движение может быть:
1. По характеру движения
• поступательным — это движение, при котором все точки тела движутся одинаково и любая прямая, мысленно проведенная в теле, остается параллельна сама себе;
• вращательным — это движение, при котором все точки твердого тела движутся по окружностям, расположенным в параллельных плоскостях;
• колебательным — это движение, которое повторяется с течением времени.
2. По виду траектории
• прямолинейным — это движение, траектория которого прямая линия;
• криволинейным — это движение, траектория которого кривая линия;
3. По скорости
• равномерным — движение, при котором скорость тела с течением времени остается постоянной;
• неравномерным — это движение, при котором скорость тела с течением времени изменяется; 4. По ускорению
• равноускоренным — это движение, при котором скорость за любые равные промежутки времени тела увеличивается с течением времени на одну и ту же величину; • равнозамедленным — это движение, при котором скорость тела за любые равные промежутки времени уменьшается с течением времени на одну и ту же величину
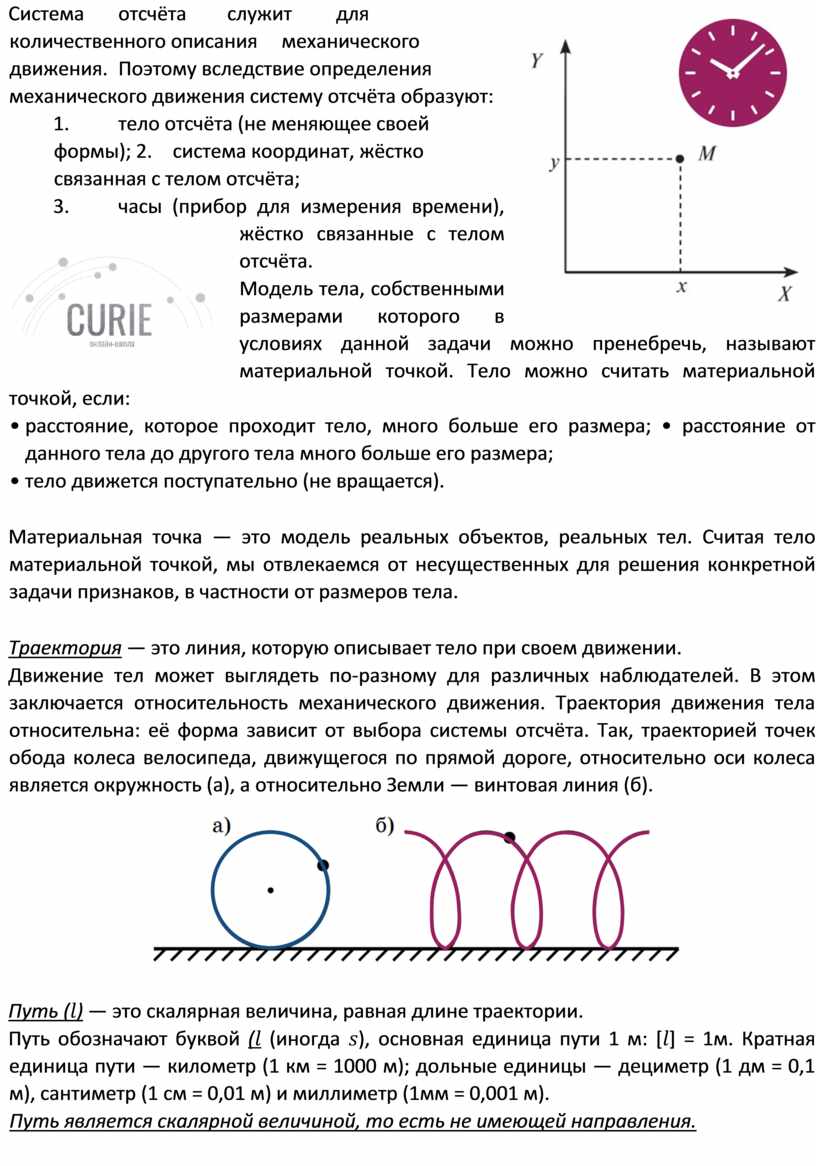
 Система отсчёта
служит для количественного описания механического движения.
Поэтому вследствие определения механического движения систему отсчёта
образуют:
Система отсчёта
служит для количественного описания механического движения.
Поэтому вследствие определения механического движения систему отсчёта
образуют:
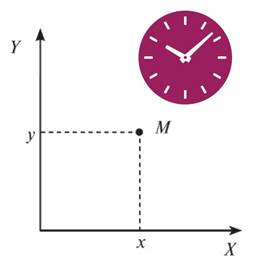
1. тело отсчёта (не меняющее своей формы); 2. система координат, жёстко связанная с телом отсчёта;
3. часы (прибор для измерения времени), жёстко связанные с телом отсчёта.
Модель тела, собственными размерами которого в условиях данной задачи можно пренебречь, называют материальной точкой. Тело можно считать материальной точкой, если:
• расстояние, которое проходит тело, много больше его размера; • расстояние от данного тела до другого тела много больше его размера;
• тело движется поступательно (не вращается).
Материальная точка — это модель реальных объектов, реальных тел. Считая тело материальной точкой, мы отвлекаемся от несущественных для решения конкретной задачи признаков, в частности от размеров тела.
Траектория — это линия, которую описывает тело при своем движении.
Движение тел может выглядеть по-разному для различных наблюдателей. В этом заключается относительность механического движения. Траектория движения тела относительна: её форма зависит от выбора системы отсчёта. Так, траекторией точек обода колеса велосипеда, движущегося по прямой дороге, относительно оси колеса является окружность (а), а относительно Земли — винтовая линия (б).
Путь (𝑙) — это скалярная величина, равная длине траектории.
Путь обозначают буквой (𝑙 (иногда 𝑠), основная единица пути 1 м: [𝑙] = 1м. Кратная единица пути — километр (1 км = 1000 м); дольные единицы — дециметр (1 дм = 0,1 м), сантиметр (1 см = 0,01 м) и миллиметр (1мм = 0,001 м).
Путь является скалярной величиной, то есть не имеющей направления.
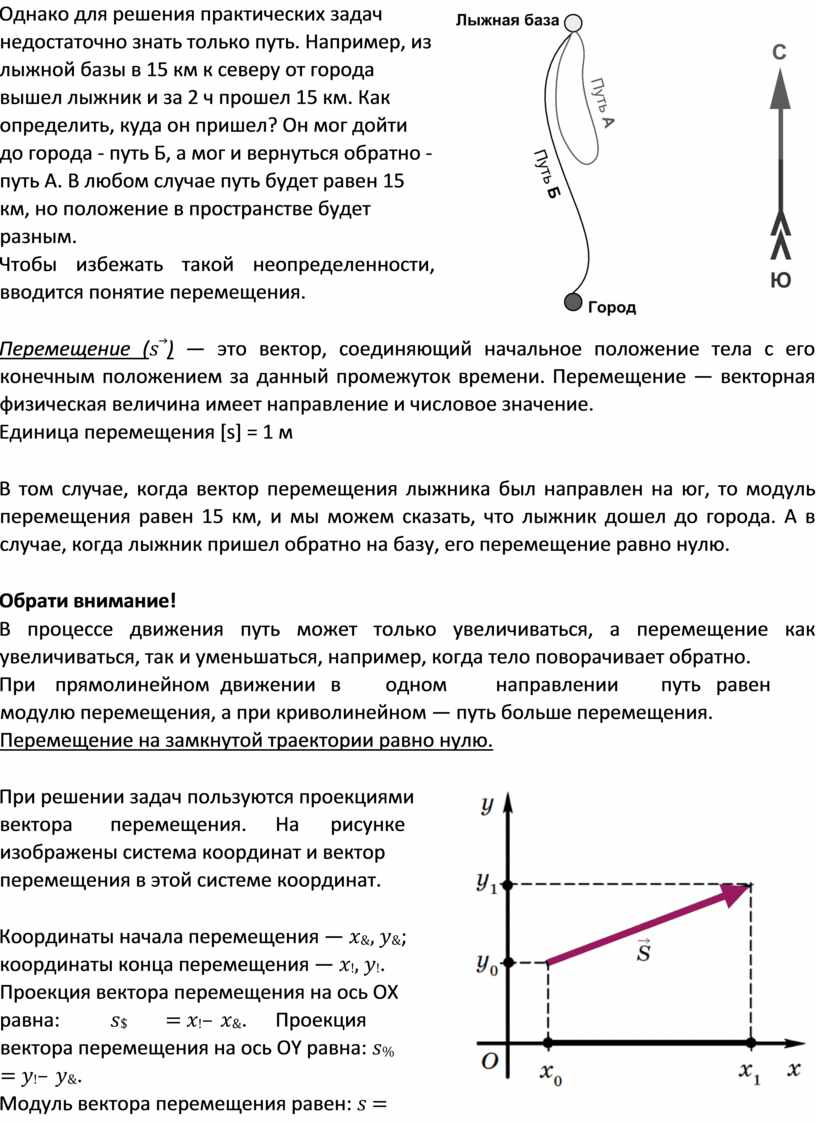
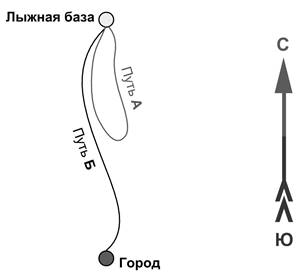 Однако для решения практических задач недостаточно знать
только путь. Например, из лыжной базы в 15 км к северу от города вышел лыжник и
за 2 ч прошел 15 км. Как определить, куда он пришел? Он мог дойти до города -
путь Б, а мог и вернуться обратно - путь А. В любом случае путь будет равен 15
км, но положение в пространстве будет разным.
Однако для решения практических задач недостаточно знать
только путь. Например, из лыжной базы в 15 км к северу от города вышел лыжник и
за 2 ч прошел 15 км. Как определить, куда он пришел? Он мог дойти до города -
путь Б, а мог и вернуться обратно - путь А. В любом случае путь будет равен 15
км, но положение в пространстве будет разным.
Чтобы избежать такой неопределенности, вводится понятие перемещения.
Перемещение (𝑠⃗) — это вектор, соединяющий начальное положение тела с его конечным положением за данный промежуток времени. Перемещение — векторная физическая величина имеет направление и числовое значение.
Единица перемещения [s] = 1 м
В том случае, когда вектор перемещения лыжника был направлен на юг, то модуль перемещения равен 15 км, и мы можем сказать, что лыжник дошел до города. А в случае, когда лыжник пришел обратно на базу, его перемещение равно нулю.
Обрати внимание!
В процессе движения путь может только увеличиваться, а перемещение как увеличиваться, так и уменьшаться, например, когда тело поворачивает обратно.
При прямолинейном движении в одном направлении путь равен модулю перемещения, а при криволинейном — путь больше перемещения. Перемещение на замкнутой траектории равно нулю.
 При решении задач пользуются проекциями вектора перемещения.
На рисунке изображены система координат и вектор перемещения в этой
системе координат.
При решении задач пользуются проекциями вектора перемещения.
На рисунке изображены система координат и вектор перемещения в этой
системе координат.
Координаты начала перемещения — 𝑥&, 𝑦&; координаты конца перемещения — 𝑥!, 𝑦!. Проекция вектора перемещения на ось ОХ равна: 𝑠$ = 𝑥!– 𝑥&. Проекция вектора перемещения на ось ОY равна: 𝑠% = 𝑦!– 𝑦&.
Модуль вектора перемещения равен: 𝑠 =


Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.

 1)
1)