Поделиться

ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Концепция модернизации российского образования определяет цели общего образования как ориентацию образования не только на усвоение обучающимися определенной суммы знаний, но и на развитие его личности, его познавательных и созидательных способностей. Необходимость полного цикла образования в школьном возрасте обусловлена новыми требованиями к образованности человека, в полной мере заявившими о себе на рубеже веков. Современный образовательный процесс должен быть направлен не только на передачу определенных знаний, умений и навыков, но и на разноплановое развитие ребенка, раскрытие его творческих возможностей, способностей, таких качеств личности как инициативность, самодеятельность, фантазия, самобытность, то есть всего того, что относится к индивидуальности человека. Практика показывает, что указанные требования к образованности человека не могут быть удовлетворены только школьным образованием: формализованное базовое образование все больше нуждается в дополнительном неформальном, которое было и остается одним из определяющих факторов развития склонностей, способностей и интересов человека, его социального и профессионального самоопределения.
Актуальность программы определяется востребованностью развития данного направления деятельности современным обществом.
Программа «Робототехника» удовлетворяет творческие, познавательные потребности заказчиков: детей и их родителей.
Программа «Робототехника» включает в себя изучение ряда направлений в области конструирования и моделирования, программирования и решения различных технических задач.
Дополнительная образовательная программа «Робототехника» имеет научно-техническую направленность с элементами естественно-научных элементов. Программа рассчитана на 1 год обучения.
Новизна данной программы определяется гибкостью по отношению к платформам реализуемых робототехнических устройств.
Данная программа позволяет построить интегрированный курс, сопряженный со смежными направлениями, напрямую выводящий на свободное манипулирование конструкционными и электронными компонентами. Встраиваясь в единую линию, заданную целью проектирования, компоненты приобретают технологический характер, фактически становятся конструктором, позволяющим иметь больше степеней свободы творчества
Цель программы:
- развитие творческих и научно-технических компетенций обучающихся в неразрывном единстве с воспитанием коммуникативных качеств и целенаправленности личности через систему практикоориентированных групповых занятий, консультаций и самостоятельной деятельности воспитанников по созданию робототехнических устройств, решающих поставленные задачи.
Задачи программы:
- развивать научно-технические способности (критический, конструктивистский и алгоритмический стили мышления, фантазию, зрительно-образную память, рациональное восприятие действительности);
- расширять знания о науке и технике как способе рационально-практического освоения окружающего мира;
- обучить решению практических задач, используя набор технических и интеллектуальных умений на уровне свободного использования;
- формировать устойчивый интерес робототехнике, способность воспринимать их исторические и общекультурные особенности;
- воспитывать уважительное отношение к труду.
Категория обучающихся: дети возрастом от 6 до 12 лет (1-5 класс).
Срок реализации программы – 1 год.
Кол-во часов: 30 часов (1 час в неделю)
Форма подведения итогов: Итоговые проекты воспитанников выносятся на робототехнические соревнования, конкурсы, выставки технического творчества и конференции НОУ всех возможных уровней.
При работе используются различные приемы групповой деятельности в разноуровневых группах для обучения элементам кооперации, внесения в собственную деятельность самооценки, взаимооценки, умение работать с технической литературой и выделять главное.
В рамках учебного плана каждого года особо выделены часы, используемые для разработки и подготовки роботов к соревнованиям, участие в соревнованиях. Эти часы четко не распределены по времени, поскольку зависят от графика соревновательного процесса и результативности участия команд воспитанников. Вообще тематика и график соревнований не могут быть спланированы заранее, исключение составляют внутренние. Однако и они в значительной мере зависят от тематики мировых первенств, на основании которых в феврале – марте разрабатываются регламенты федерального и регионального уровней. Россия пока еще ни разу не выступала организатором мировых первенств, соответственно в стране нет даже частичного стандарта в области робоспорта. Если он появится – вписать соревновательный график в сетку имеющихся часов не составит труда.
Форма проведения занятий близка к игровой и в значительной мере базируется на заинтересованности ребенка в познавательных играх, носящих соревновательный характер. К этому году в большей степени относятся микросоревнования, соревнования прямого противоборства и соревнования на выполнение игровой ситуации. Воспитанник получает первый опыт командной работы и коллективной ответственности за результат.
Формы контроля
• Микросоревнование – разновидность контрольных мероприятий в игровой форме методики развивающего обучения. Соревнование, имеющее целью уяснение воспитанниками отдельных тем (в некотором роде – аналог школьной контрольной работы с обязательным разбором полученных результатов). Подготовка начинается с разработки сценария.
• Соревнование – основная форма подведения итогов и получения объективной оценки достижения программных целей. В данном случае – очень гибкая как по времени, так и по тематике форма, поскольку выстраивается на основе планов внешних организаций (в том числе федерального и международного уровней).
• Участие в конференции НОУ «Эврика» – форма оценивания успешности освоения программы для воспитанников, проявляющих склонность к научной деятельности.
• Участие в выставке технического творчества – форма оценивания успешности освоения программы для воспитанников, проявляющих склонность к конструкторской деятельности.
• Участие в тематических конкурсах – разновидность соревнования, проводимого в свободной категории. Используется эпизодически в соревнованиях всех уровней.
Контроль динамики усвоения программы осуществляется на основе непрерывного мониторирования результативности деятельности каждого воспитанника. Поскольку соревнования организуются в групповой форме, для получения объективной информации педагог ненавязчиво обеспечивает ротацию состава команд и отражает его в журнале мониторинга. Дополнительной оценкой являются педагогические наблюдения, цель которых в выявлении профессиональных предпочтений и способностей. Результаты педагогических наблюдений выносятся на обсуждение при собеседовании с воспитанником. Мониторинг результативности, построенный на основе данных группового скрининга, достаточно нетривиален по структуре. Включаясь в работу новой группы ребенок занимает новую нишу, устанавливает новые отношения, принимает на себя новую роль. Очевидно, что оценка деятельности команды не тождественна деятельности каждого ее члена, следовательно несет косвенный характер. Простейшим решением вопроса может быть использование методики текущих самооценок воспитанников, хорошо зарекомендовавшей себя в педагогической практике.
Материально-техническое обеспечение
Поскольку программа выстроена на принципах полиплатформенности, важна не конкретная платформа, а наличие необходимого оборудования у каждой команды.
• 1 робототехническая платформа на 2 воспитанников;
• 1 комплект инструментов на 2 воспитанников;
• 1 ресурсный комплект на 8-10 воспитанников;
• 1 компьютер с установленным программным обеспечением на 2 воспитанников;
• набор полей для соревнований;
• материал для изготовления полей;
• мастерская, оборудованная в соответствии с требованиями СанПиН и техники безопасности;
• учебный кабинет для проведения занятий и внутренних соревнований, оборудованный мультимедийным оборудованием, проекционной техникой;
• мониторинг и журнал педагогических наблюдений реализуются в цифровом формате.
• Наборы мнемонических карт по темам программы.
• Наборы технологических карт и инструкций для лабораторных работ.
• Сборник правил соревнований.
• Иллюстративный и информационный видеоматериал для лекционной формы занятий.
• Плакаты и иллюстрации технических конструкций и решений.
• Литература по теме курса (желательно с возможностью функционирования в режиме библиотеки).
Ожидаемые результаты и способы их проверки:
после освоения данной программы воспитанник получит знания о:
- науке и технике как способе рационально-практического освоения окружающего мира;
- роботах, как об автономных модулях, предназначенных для решения сложных практических задач;
- истории и перспективах развития робототехники;
- робоспорте, как одном из направлений технических видов спорта;
- физических, математических и логических теориях, положенных в основу проектирования и управления роботами;
овладеет –
- критическим, конструктивистским и алгоритмическим стилями мышления;
- техническими компетенциями в сфере робототехники, достаточными для получения высшего образования по данному направлению;
- набором коммуникативных компетенций, позволяющих безболезненно войти и функционировать без напряжения в команде, собранной для решения некоторой технической проблемы;
- разовьет фантазию, зрительно-образную память, рациональное восприятие действительности;
- научится решать практические задачи, используя набор технических и интеллектуальных умений на уровне их свободного использования;
- приобретет уважительное отношение к труду как к обязательному этапу реализации любой интеллектуальной идеи.
Основная и дополнительная литература
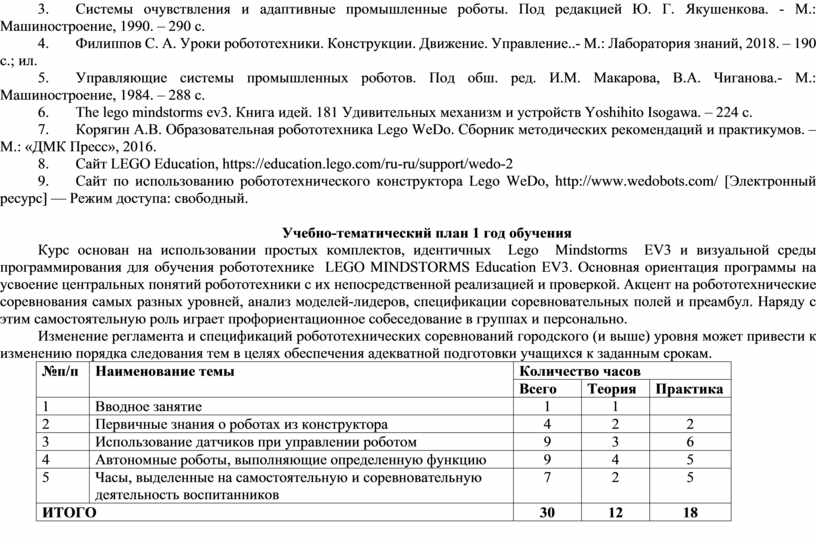
1. Шахинпур М. Курс робототехники. – М.: Мир, 1990. – 527с.
2. Фу К., Гонсалес Р., Ли К. Робототехника: Пер с англ. – М.: Мир, 1989. – 624 с.
3. Системы очувствления и адаптивные промышленные роботы. Под редакцией Ю. Г. Якушенкова. - М.: Машиностроение, 1990. – 290 с.
4. Филиппов С. А. Уроки робототехники. Конструкции. Движение. Управление..- М.: Лаборатория знаний, 2018. – 190 с.; ил.
5. Управляющие системы промышленных роботов. Под обш. ред. И.М. Макарова, В.А. Чиганова.- М.: Машиностроение, 1984. – 288 с.
6. The lego mindstorms ev3. Книга идей. 181 Удивительных механизм и устройств Yoshihito Isogawa. – 224 с.
7. Корягин А.В. Образовательная робототехника Lego WeDo. Сборник методических рекомендаций и практикумов. – М.: «ДМК Пресс», 2016.
8. Сайт LEGO Education, https://education.lego.com/ru-ru/support/wedo-2
9. Сайт по использованию робототехнического конструктора Lego WeDo, http://www.wedobots.com/ [Электронный ресурс] — Режим доступа: свободный.
Учебно-тематический план 1 год обучения
Курс основан на использовании простых комплектов, идентичных Lego Mindstorms EV3 и визуальной среды программирования для обучения робототехнике LEGO MINDSTORMS Education EV3. Основная ориентация программы на усвоение центральных понятий робототехники с их непосредственной реализацией и проверкой. Акцент на робототехнические соревнования самых разных уровней, анализ моделей-лидеров, спецификации соревновательных полей и преамбул. Наряду с этим самостоятельную роль играет профориентационное собеседование в группах и персонально.
Изменение регламента и спецификаций робототехнических соревнований городского (и выше) уровня может привести к изменению порядка следования тем в целях обеспечения адекватной подготовки учащихся к заданным срокам.
|
№п/п |
Наименование темы |
Количество часов |
||
|
Всего |
Теория |
Практика |
||
|
1 |
Вводное занятие |
1 |
1 |
|
|
2 |
Первичные знания о роботах из конструктора |
4 |
2 |
2 |
|
3 |
Использование датчиков при управлении роботом |
9 |
3 |
6 |
|
4 |
Автономные роботы, выполняющие определенную функцию |
9 |
4 |
5 |
|
5 |
Часы, выделенные на самостоятельную и соревновательную деятельность воспитанников |
7 |
2 |
5 |
|
ИТОГО |
30 |
12 |
18 |
|
Календарно-тематическое планирование по курсу «Робототехника»
|
№ п\п |
Раздел |
Тема урока |
Кол-во часов |
Основные виды учебной деятельности
|
Домашнее задание |
План |
Факт |
|
1 |
Вводное занятие |
Введение в робототехнику. |
1 |
Знакомство с понятиями «робот», «робототехника», «робоспорт». Применение роботов в различных сферах жизни человека, значение робототехники. Ознакомление с комплектом деталей для изучения робототехники: контроллер, сервоприводы, соединительные кабели, датчики-касания, ультразвуковой, освещения. |
Не задано |
|
|
|
2 |
Первичные знания о роботах из конструктора. |
Робоспорт. Техника безопасности |
1 |
Просмотр видеофильма о роботизированных системах. Показ действующей модели робота и его программ: на основе датчика освещения, ультразвукового датчика, датчика касания. Порты подключения. Создание колесной базы на гусеницах |
Не задано |
|
|
|
3 |
|
Первая программа |
1 |
Понятие «программа», «алгоритм». Алгоритм движения робота по кругу, вперед-назад, «восьмеркой» и пр. Написание программы для движения по кругу через меню контроллера. Запуск и отладка программы. Написание других простых программ на выбор учащихся и их самостоятельная отладка. |
Не задано |
|
|
|
4 |
|
Ознакомление с визуальной средой программирования |
1 |
Понятие «среда программирования», «логические блоки». Показ написания простейшей программы для робота. Написание программы для воспроизведения звуков и изображения по образцу. |
Не задано |
|
|
|
5 |
|
Робот в движении |
1 |
Написание линейной программы. Понятие «мощность мотора», «калибровка». Зубчатая передача. Применение блока «движение» в программе. Создание и отладка программы для движения с ускорением, вперед-назад. «Робот-волчок». Плавный поворот, движение по кривой. |
Не задано |
|
|
|
6-7 |
Использование датчиков при управлении роботом. |
Понятие «цикл» |
2 |
Первая программа с циклом. Написание программ с циклом. Использование блока «цикл» в программе. Создание и отладка программы для движения робота по «восьмерке». |
Не задано |
|
|
|
8-9 |
|
Робот-танцор |
2 |
Понятие «генератор случайных чисел». Использование блока «случайное число» для управления движением робота. Создание программы для движения робота по случайной траектории. Робот без EV3-блока управления. |
Не задано |
|
|
|
10 |
|
Робот рисует |
1 |
Теория движения робота по сложной траектории. Написание программы для движения по контуру. |
Не задано |
|
|
|
11 |
|
Робот, повторяющий воспроизведенные действия |
1 |
Промышленные манипуляторы и их отладка. Блок «записи/воспроизведения». Робот, записывающий траекторию движения и потом точно её воспроизводящий. |
Не задано |
|
|
|
12 |
|
Робот, определяющий расстояние до препятствия |
1 |
Робот, останавливающийся на определенном расстоянии до препятствия. Робот-охранник. Робот, выдерживающий расстояние от препятствия. |
Не задано |
|
|
|
13- 14 |
|
Ультразвуковой датчик управляет роботом |
2 |
Роботы – пылесосы, роботы-уборщики. Цикл и прерывания. Создание и отладка программы для движения робота внутри помещения и самостоятельно огибающего препятствия. |
Не задано |
|
|
|
15 |
Автономные роботы, выполняющие определенную функцию. |
Робот-прилипала |
1 |
Программа с вложенным циклом. Подпрограмма. Робот, следящий за протянутой рукой и выдерживающий требуемое расстояние в динамике. Настройка иных действий в зависимости от показаний ультразвукового датчика. |
Не задано |
|
|
|
16- 17 |
|
Использование нижнего датчика освещенности |
2 |
Яркость объекта, отраженный свет, освещенность, распознавание цветов роботом. Робот, останавливающийся на черной линии. Робот, начинающий двигаться по комнате, когда включается свет. |
Не задано |
|
|
|
18- 19 |
|
Движение вдоль линии |
2 |
Калибровка датчика освещенности. Робот, движущийся вдоль черной линии. |
Не задано |
|
|
|
20- 21 |
|
Робот с несколькими датчиками |
2 |
Датчик касания, типы касания. Создание робота и его программы с задним датчиком касания и передним ультразвуковым. |
Не задано |
|
|
|
22- 23 |
|
Ускоренное движение по криволинейной траектории |
2 |
Принципы дифференциального управления. Робот, движущийся вдоль черной линии. |
Не задано |
|
|
|
24- 25 |
Часы, выделенные на самостоятельную и соревновательную деятельность воспитанников. |
Движение по прерывистой линии |
2 |
Принципы интегрального управления. Робот, движущийся вдоль черной линии. |
Не задано |
|
|
|
26 |
|
Манипулятор робота |
1 |
Определение касания – рычаг, определение цвета предмета. Робот для квадро-кегельринга. |
Не задано |
|
|
|
27- 28 |
|
Определение наклонной поверхности |
2 |
Датчик наклона на сонаре, на датчике освещенности, на контактных датчиках. Робот, выбирающий дорогу по пандусам. |
Не задано |
|
|
|
29 |
|
Конструкции роботов для поворота в ограниченном пространстве |
1 |
Циркуляция гусеничной и колесной платформ. Платформа на шаре. Эксперименты с платформами |
Не задано |
|
|
|
30 |
|
Итоговый проект |
1 |
|
Не задано |
|
|
|
|
|
|
30 |
|
|
|
|
Итого: 30 часа




Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.