Робототехника в школе представляет учащимся технологии 21 века, способствует развитию их коммуникативных способностей, развивает навыки взаимодействия, самостоятельности при принятии решений, раскрывает их творческий потенциал. Дети и подростки лучше понимают, когда они что-либо самостоятельно создают или изобретают. При проведении занятий по робототехнике этот факт не просто учитывается, а реально используется на каждом занятии.Меню файл (File).
1. Создает новый документ.
2. Открывает сохраненный на диске документ.
3. Закрывает текущий документ.
4. Сохраняет измения в текущем документе.
5. Сохраняет документ с заданным именем в заданном месте.
6. Настройка печати документа.
7. Печать документа.
8. Выход из программы.
Программирование в среде Lego Mindstorms NXT
2.0
Рабочая область Lego Mindstorms NXT 2.0
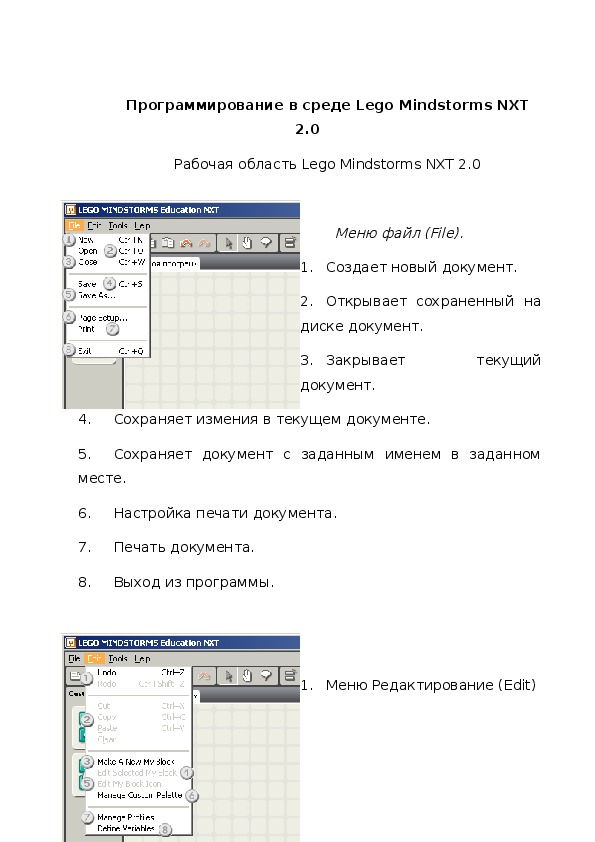
Меню файл (File).
1. Создает новый документ.
2. Открывает сохраненный на
диске документ.
3. Закрывает
документ.
текущий
4.
Сохраняет измения в текущем документе.
Сохраняет документ с заданным именем в заданном
5.
месте.
6.
7.
8.
Настройка печати документа.
Печать документа.
Выход из программы.
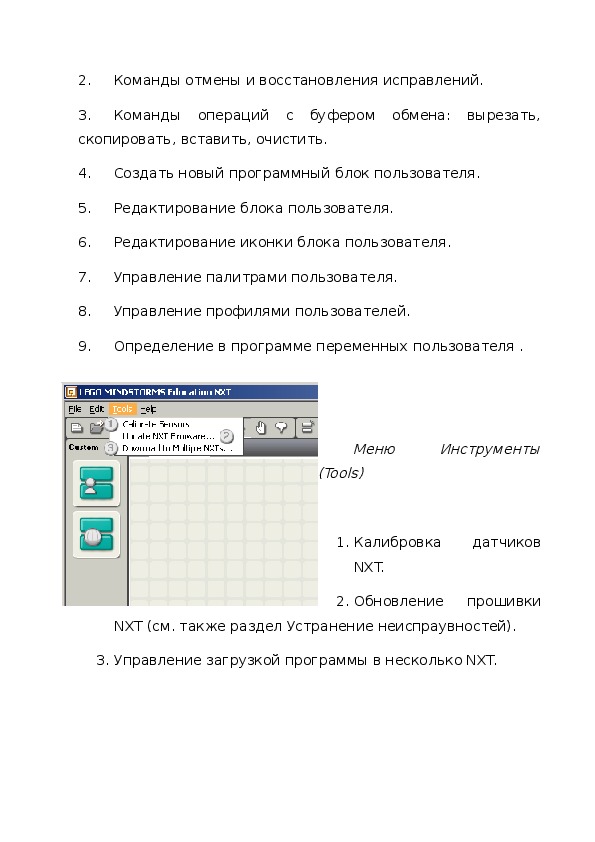
1. Меню Редактирование (Edit)2.
Команды отмены и восстановления исправлений.
Команды операций с буфером обмена: вырезать,
3.
скопировать, вставить, очистить.
4.
5.
6.
7.
8.
9.
Создать новый программный блок пользователя.
Редактирование блока пользователя.
Редактирование иконки блока пользователя.
Управление палитрами пользователя.
Управление профилями пользователей.
Определение в программе переменных пользователя .
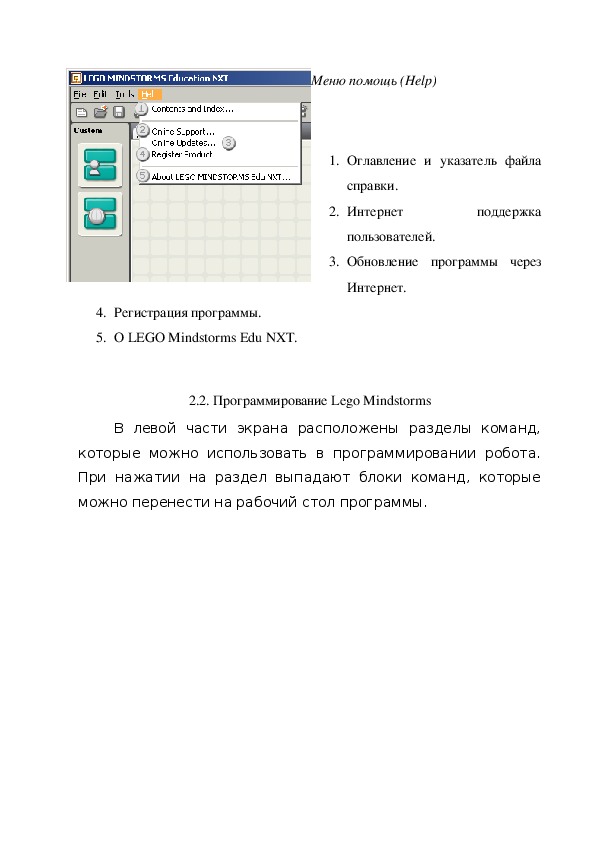
Меню Инструменты
(Tools)
1. Калибровка датчиков
NXT.
2. Обновление прошивки
NXT (см. также раздел Устранение неиспраувностей).
3. Управление загрузкой программы в несколько NXT.Меню помощь (Help)
1. Оглавление и указатель файла
справки.
2. Интернет
поддержка
пользователей.
3. Обновление программы через
Интернет.
4. Регистрация программы.
5. О LEGO Mindstorms Edu NXT.
2.2. Программирование Lego Mindstorms
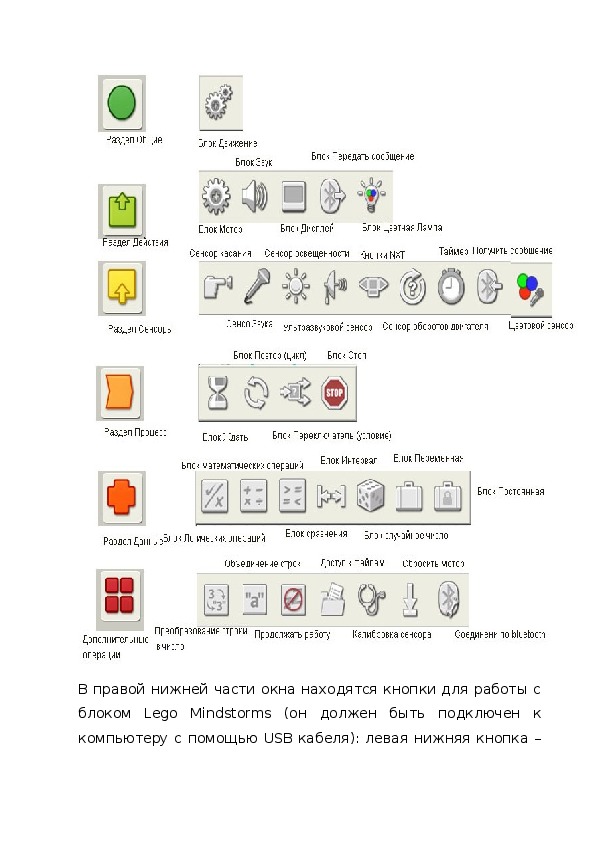
В левой части экрана расположены разделы команд,
которые можно использовать в программировании робота.
При нажатии на раздел выпадают блоки команд, которые
можно перенести на рабочий стол программы.В правой нижней части окна находятся кнопки для работы с
блоком Lego Mindstorms (он должен быть подключен к
компьютеру с помощью USB кабеля): левая нижняя кнопка –Download – сохранить программу в блок,
центральная кнопка – Download and Run –
сохранить программу и сразу же её
выполнить.
Move (Движение)
Перенесите данную команду на рабочий стол
программы и нажимаем на неё левой кнопкой
мыши. В нижней части экрана появится
панель настройки параметров команды:
– управляемые порты (к которым подключены
Port
двигатели) – A, B, C
Direction – направление движения: вперед ↑, назад ↓, стоп
Steering – поворот – робот едет прямо, поворачивает налево
или направо, разворачивается
Power – мощность двигателя (например, 20% - робот едет
очень медленно, 100% – робот едет очень быстро)Duration – длительность вращения двигателей, которая
может быть задана различным образом: количество полных
оборотов (Rotations), поворот на определенный угол (в
градусах), вращение в течение определенного времени
Seconds (в секундах).
Next Action – нужно ли затормозить двигатели после
выполнения командыWait (Ожидание)
Команда роботу ожидать, например, несколько секунд.
Примеры программ, которые можно сделать, используя
команду Wait:
Робот двигается, на некоторое время останавливается, двигается снова
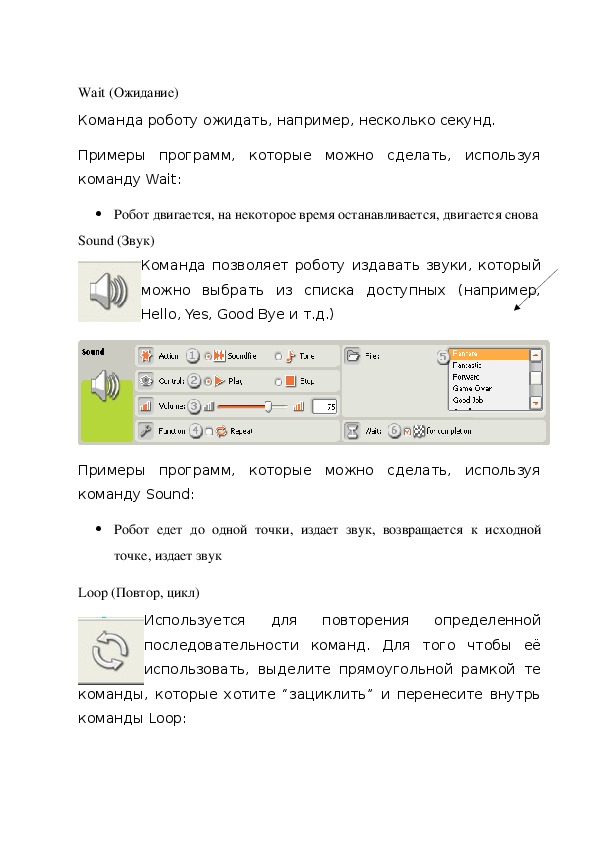
Sound (Звук)
Команда позволяет роботу издавать звуки, который
можно выбрать из списка доступных (например,
Hello, Yes, Good Bye и т.д.)
Примеры программ, которые можно сделать, используя
команду Sound:
Робот едет до одной точки, издает звук, возвращается к исходной
точке, издает звук
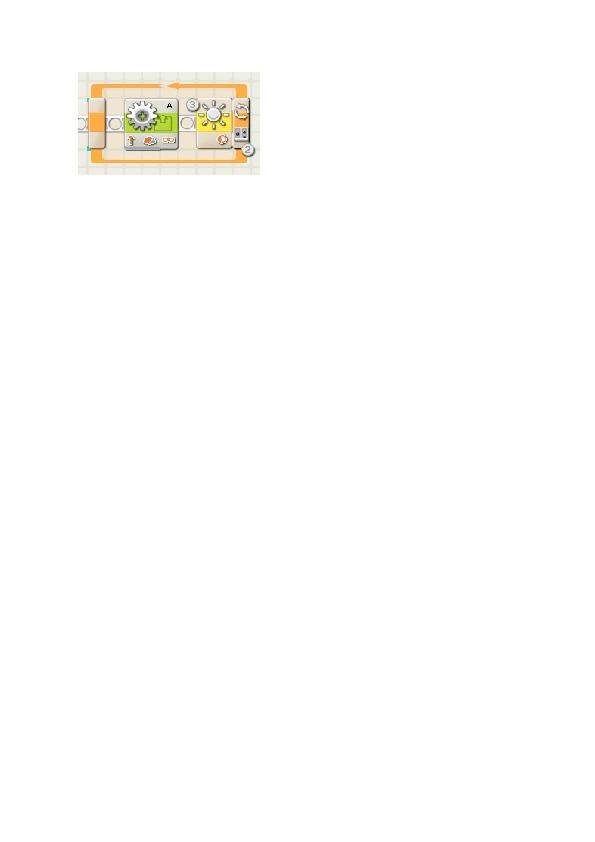
Loop (Повтор, цикл)
Используется для повторения определенной
последовательности команд. Для того чтобы её
использовать, выделите прямоугольной рамкой те
команды, которые хотите “зациклить” и перенесите внутрь
команды Loop:Switch (Переключатель, условие)
Команда может использоваться для получения
роботом информации с датчиков
Данная команда является ветвлением,
в
зависимости от информации, поступившей с датчика,
выполняется либо верхняя команда (несколько команд),
либо нижняя.
Кликните левой кнопкой мыши по команде и в нижней
части экрана откроется панель настройки ветвления.
Port – порт, к которому подключен датчик, информацию с
которого нужно получить (может быть только один для
одной команды Switch, если нужно опросить несколько
датчиков, используется несколько ветвлений)
Sensor – тип датчика, с которого берется информация
Ultrasonic Sensor
Примеры программ, которые можно сделать, используя
команду Switch: Робот едет вперед, на определенном расстоянии до стены
останавливается
Робот едет вперед, на определенном расстоянии до края стола
останавливается
То же, что в предыдущих пунктах, но после препятствия робот
поворачивает на определенный угол, затем едет до следующего
препятствия (например, робот, который объезжает стол вдоль края, не
падая с него)
То же, что в предыдущем пункте, но при достижении препятствия
робот издает звук
2.3. Регламент соревновании роботов «Кегельрингклассик»
1. Условия состязания
1. За наиболее короткое время робот, не выходя более чем
на 5 секунд за пределы круга, очерчивающего ринг,
должен вытолкнуть расположенные в нем кегли.
2. На очистку ринга от кеглей дается максимум 2 минуты.
3. Если робот полностью выйдет за линию круга более чем
на 5 секунд, попытка не засчитывается.
4. Во время проведения состязания участники команд не
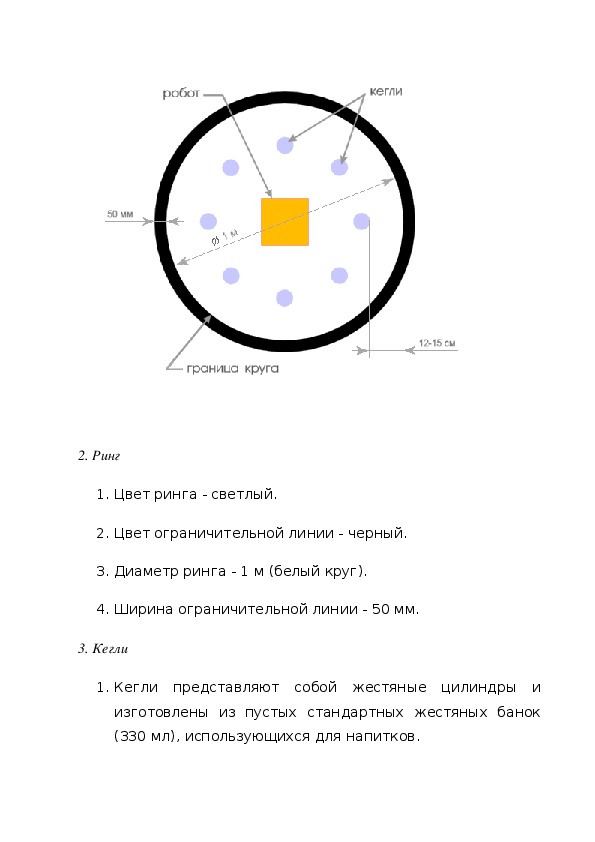
должны касаться роботов, кеглей или ринга.2. Ринг
1. Цвет ринга - светлый.
2. Цвет ограничительной линии - черный.
3. Диаметр ринга - 1 м (белый круг).
4. Ширина ограничительной линии - 50 мм.
3. Кегли
1. Кегли представляют собой жестяные цилиндры и
изготовлены из пустых стандартных жестяных банок
(330 мл), использующихся для напитков.2. Диаметр кегли - 70 мм.
3. Высота кегли - 120 мм.
4. Вес кегли - не более 50 гр.
5. Цвет кегли - белый.
4. Робот
1. Максимальная ширина робота 20 см, длина - 20 см.
2. Высота и вес робота не ограничены.
3. Робот должен быть автономным.
4. Во время соревнования размеры робота должны
оставаться неизменными и не должны выходить за
пределы 20 х 20 см.
5. Робот не должен иметь никаких приспособлений для
выталкивания кеглей (механических, пневматических,
вибрационных, акустических и др.).
6. Робот должен выталкивать кегли исключительно своим
корпусом.
7. Запрещено использование каких-либо клейких
приспособлений на корпусе робота для сбора кеглей.
5. Игра
1. Робот помещается строго в центр ринга.2. На ринге устанавливается 8 кеглей.
3. Кегли равномерно расставляются внутри окружности
ринга. На каждую четверть круга должно приходиться
не более 2-х кеглей. Кегли ставятся не ближе 12 см. и
не далее 15 см. от черной ограничительной линии.
Перед началом игры участник состязания может
поправить расположение кеглей.
Окончательная
расстановка кеглей принимается судьей соревнования.
4. Цель робота состоит в том, чтобы вытолкнуть кегли за
пределы круга, ограниченного линией.
5. Кегля считается вытолкнутой, если никакая ее часть не
находится внутри белого круга, ограниченного линией.
6. Один раз покинувшая пределы ринга кегля считается
вытолкнутой и может быть снята с ринга в случае
обратного закатывания.
7. Робот должен быть включен или инициализирован
вручную в начале состязания по команде судьи, после
чего в его работу нельзя вмешиваться. Запрещено
дистанционное управление или подача роботу любых
команд.
6. Правила отбора победителя
1. Каждой команде дается не менее двух попыток (точное
число определяется судейской коллегией в день
проведения соревнований).2. В зачет принимается лучшее время из попыток или
максимальное число вытолкнутых кеглей за отведенное
время.
3. Победителем объявляется команда, чей робот затратил
на очистку ринга от кеглей наименьшее время, или,
если ни одна команда не справилась с полной очисткой
ринга, команда, чей робот вытолкнул за пределы ринга
наибольшее количество кеглей.
2.4.Регламент соревновании роботов «Линия»
1. Условия состязания
1. За наиболее короткое время робот, следуя черной
линии, должен добраться от места старта до места
финиша.
2. На прохождение дистанции дается максимум 3 минуты.
3. Если робот потеряет линию более чем на 10 секунд
и/или срежет траекторию движения, он будет
дисквалифицирован. (Срезанием считается пропуск
линии длиной более чем три длины корпуса робота.)
4. Во время проведения состязания участники команд не
должны касаться роботов.
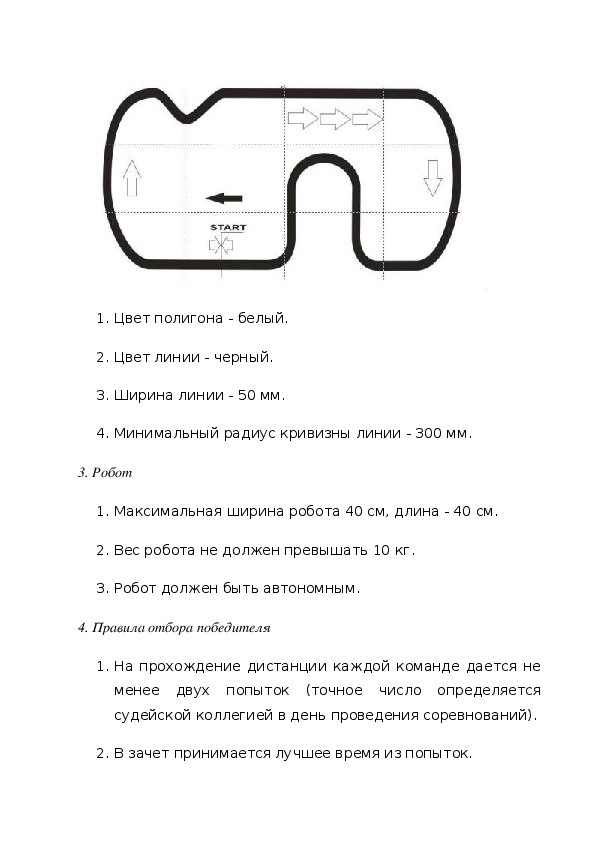
2. Трасса1. Цвет полигона - белый.
2. Цвет линии - черный.
3. Ширина линии - 50 мм.
4. Минимальный радиус кривизны линии - 300 мм.
3. Робот
1. Максимальная ширина робота 40 см, длина - 40 см.
2. Вес робота не должен превышать 10 кг.
3. Робот должен быть автономным.
4. Правила отбора победителя
1. На прохождение дистанции каждой команде дается не
менее двух попыток (точное число определяется
судейской коллегией в день проведения соревнований).
2. В зачет принимается лучшее время из попыток.3. Если робот потеряет линию более чем на 10 секунд
и/или <срежет> траекторию движения, он будет
дисквалифицирован.
4. Победителем будет объявлена команда, потратившая
на преодоление дистанции наименьшее время.
2.5.Создание технологической карты
«Робота исследователя-видеорегистратора»
Робот использует два сервопривода и поворотное
колесо. Такая конструкция позволяет роботу легко
перемещаться по любой поверности пола: и по ковру и по
твёрдому покрытию. Трёхколёсный бот может быть
использован как простой автомобиль,
умеющий
поворачивать или в качестве базовой модели для других
проектов. Так как робот может повернуть в любую сторону,
то он также поможет нам понять, как программируется блок
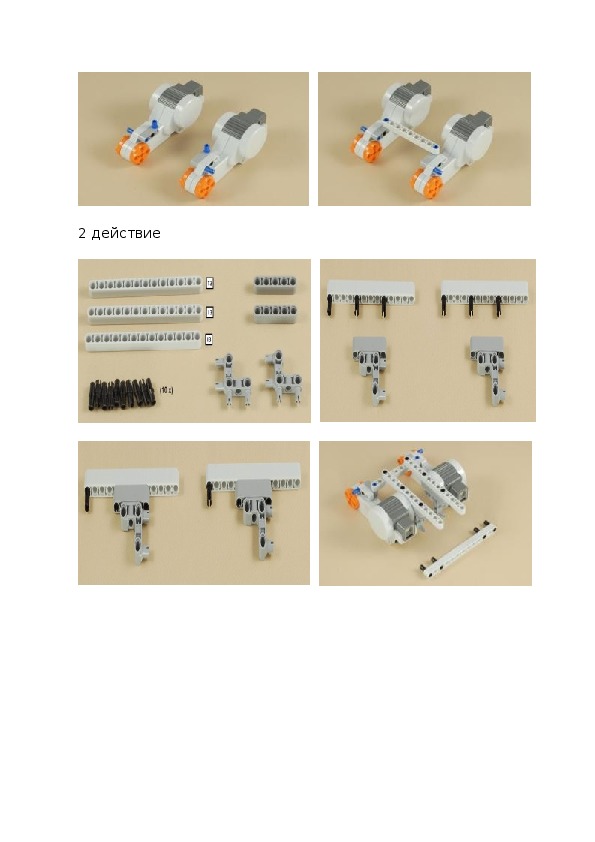
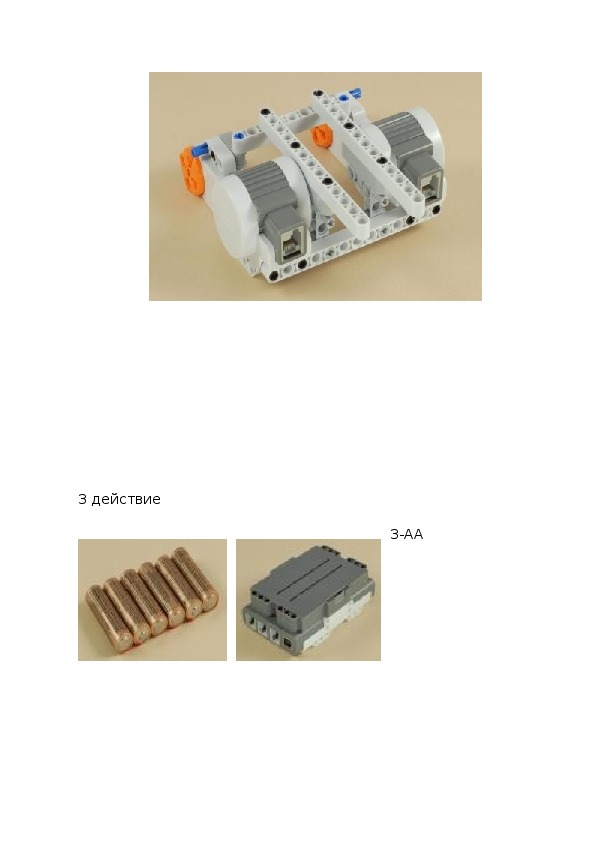
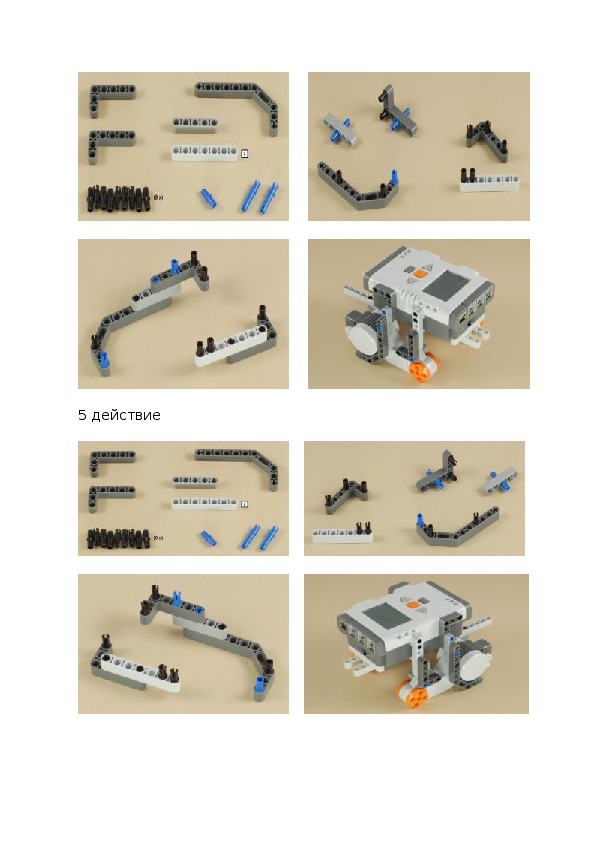
перемещения.1 действие2 действие3 действие
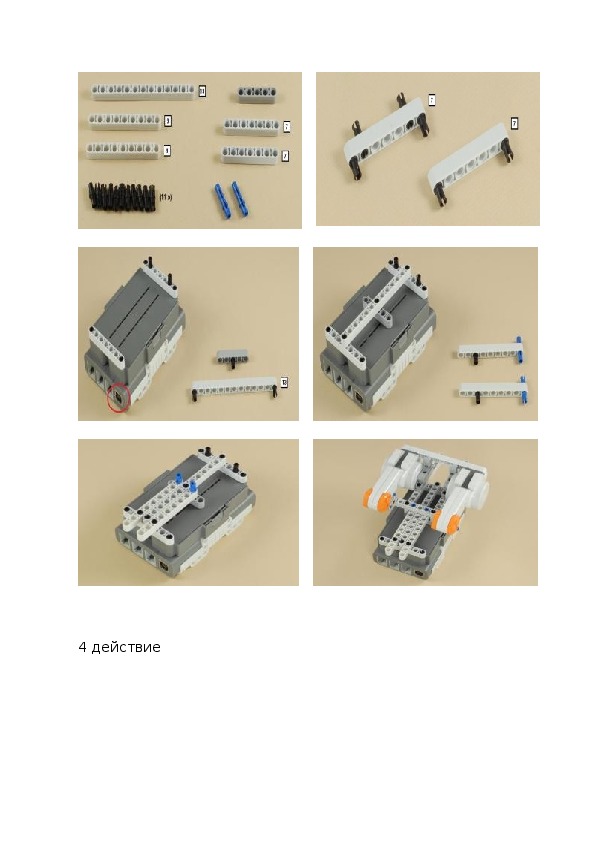
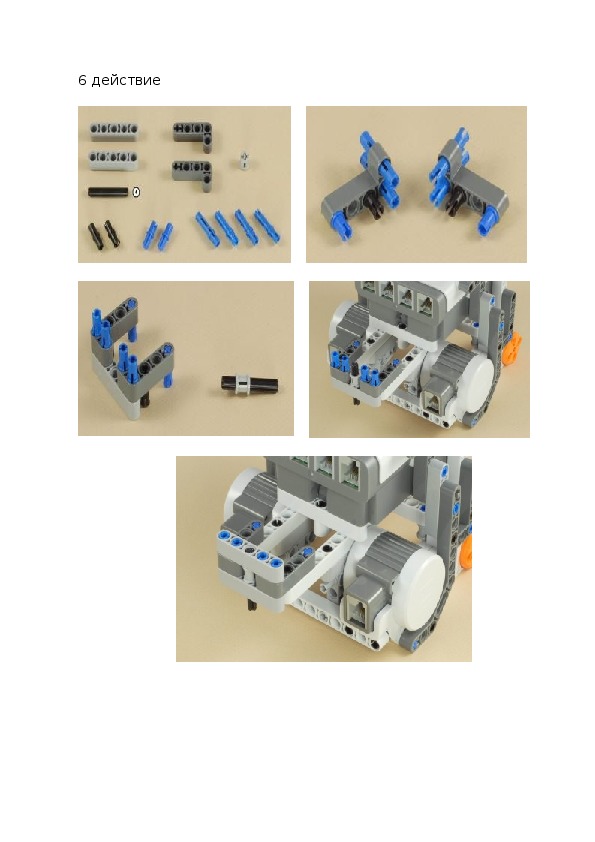
3-AA4 действие5 действие6 действие7 действие
8 действие
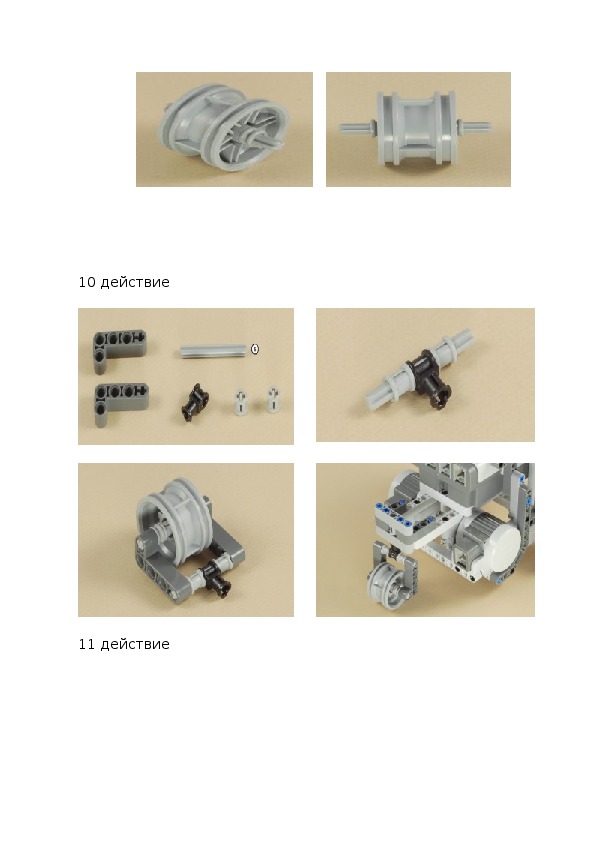
9 действие10 действие
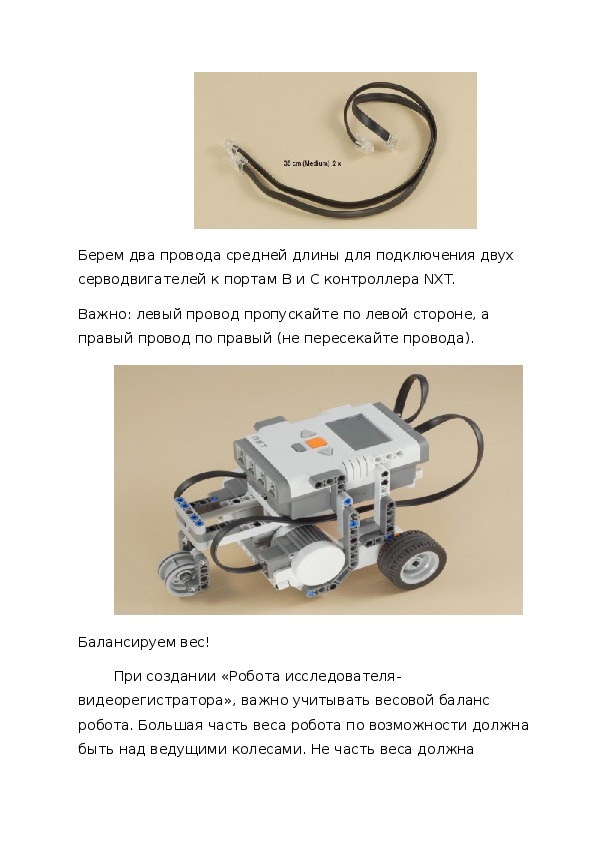
11 действиеБерем два провода средней длины для подключения двух
серводвигателей к портам B и C контроллера NXT.
Важно: левый провод пропускайте по левой стороне, а
правый провод по правый (не пересекайте провода).
Балансируем вес!
При создании «Робота исследователя-
видеорегистратора», важно учитывать весовой баланс
робота. Большая часть веса робота по возможности должна
быть над ведущими колесами. Не часть веса должнаоставаться и на третьем колесе чтобы робот не
опрокидывался.
Если больший вес у третьего колеса, робот может
опрокинуться или ведущие колеса могут начать
проскальзывать. Однако, если слишком большой вес
попадает на ведущие колеса, то при движении назад робот
может неожиданное... опрокинуться назад!
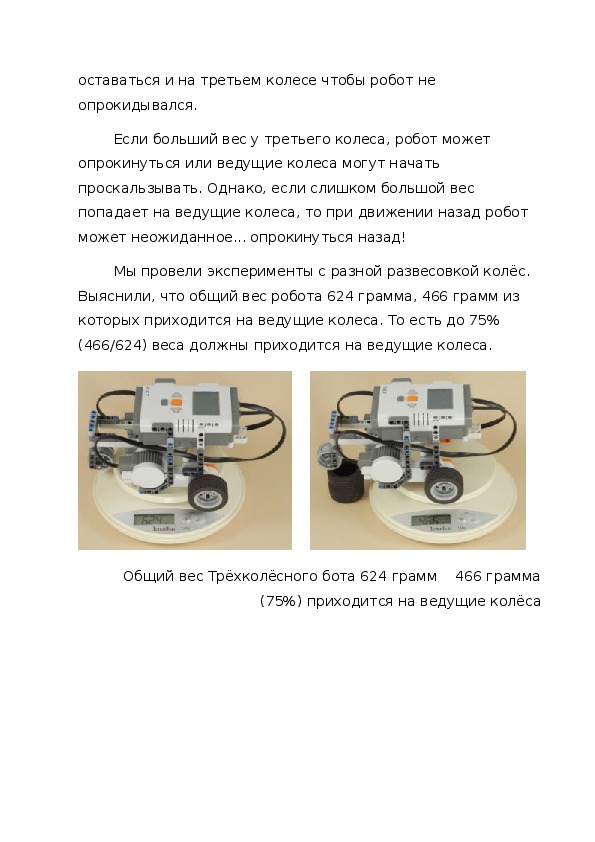
Мы провели эксперименты с разной развесовкой колёс.
Выяснили, что общий вес робота 624 грамма, 466 грамм из
которых приходится на ведущие колеса. То есть до 75%
(466/624) веса должны приходится на ведущие колеса.
Общий вес Трёхколёсного бота 624 грамм 466 грамма
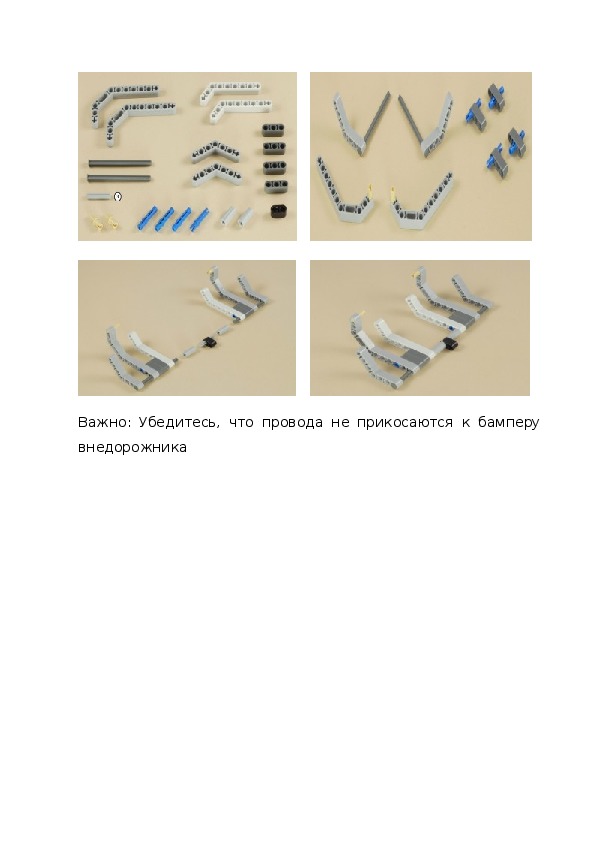
(75%) приходится на ведущие колёсаИнструкция по сборке робота "Внедорожника"Присоедините кабель от датчик нажатия в порт № 1 блока
NXTВажно: Убедитесь, что провода не прикосаются к бамперу
внедорожникаПодключите кабель двигателя в порт А на NXT, и провод
ультразвукового датчика к порту № 4 на NXT
Важно: Убедитесь, что провода не задевают бампер и
что существует достаточный запас движения головы. Голова(ультразвуковой датчик) должен поворачиваться до упора
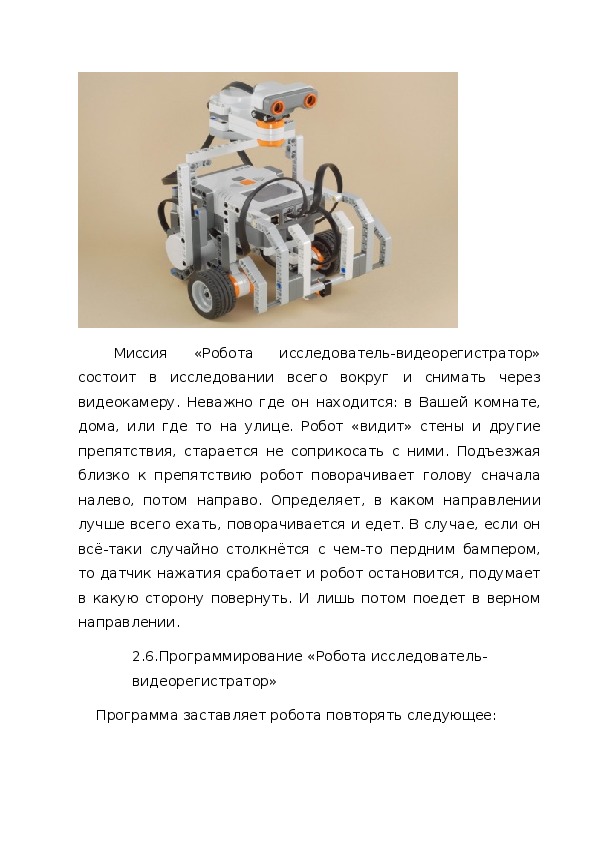
влево и вправо!Миссия «Робота исследователь-видеорегистратор»
состоит в исследовании всего вокруг и снимать через
видеокамеру. Неважно где он находится: в Вашей комнате,
дома, или где то на улице. Робот «видит» стены и другие
препятствия, старается не соприкосать с ними. Подъезжая
близко к препятствию робот поворачивает голову сначала
налево, потом направо. Определяет, в каком направлении
лучше всего ехать, поворачивается и едет. В случае, если он
всё-таки случайно столкнётся с чем-то пердним бампером,
то датчик нажатия сработает и робот остановится, подумает
в какую сторону повернуть. И лишь потом поедет в верном
направлении.
2.6.Программирование «Робота исследователь-
видеорегистратор»
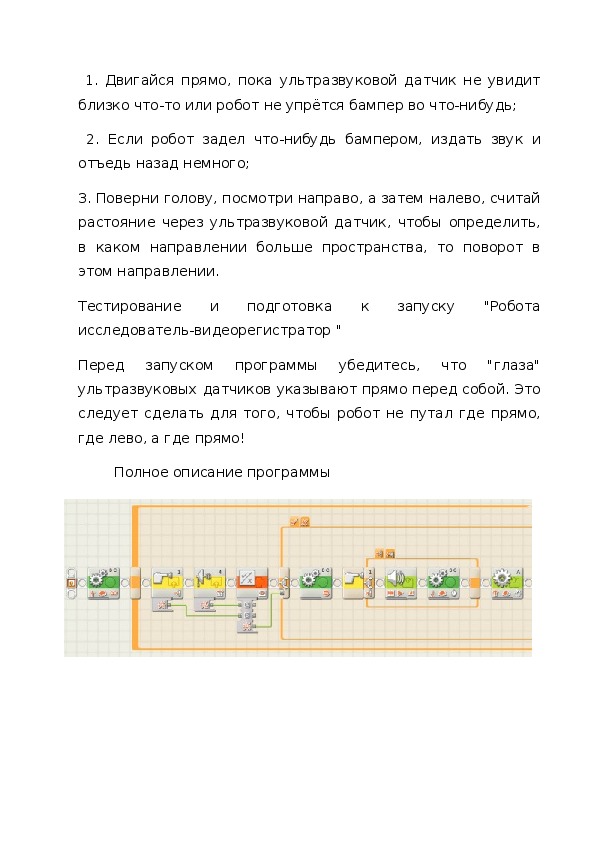
Программа заставляет робота повторять следующее:1. Двигайся прямо, пока ультразвуковой датчик не увидит
близко что-то или робот не упрётся бампер во что-нибудь;
2. Если робот задел что-нибудь бампером, издать звук и
отъедь назад немного;
3. Поверни голову, посмотри направо, а затем налево, считай
растояние через ультразвуковой датчик, чтобы определить,
в каком направлении больше пространства, то поворот в
этом направлении.
Тестирование и подготовка к запуску "Робота
исследователь-видеорегистратор "
Перед запуском программы убедитесь, что "глаза"
ультразвуковых датчиков указывают прямо перед собой. Это
следует сделать для того, чтобы робот не путал где прямо,
где лево, а где прямо!
Полное описание программы1.
Моторы ВС работают до тех пор пока не обнаружат
датчики препятствия.
2. Цикл
бесконечный.
3. Если срабатывают датчик нажатия или датчик
расстояния на 23 см., то робот останавливается.
Результат каждого теста датчика поступает в блок
логики.4.
5.
6.
7.8.9.
10.41