Цель работы - привитие навыка чтения и выполнения сложных кинематических схем элементов мехатронных устройств
Задание на работу
1 Описать сложную зубчатую передачу, по индивидуальному варианту.
2 Вычертить ее кинематическую схему в программной среде AutoCad.
3 Определить общее передаточное отношение механизма.
4 Составить спецификацию схемы.Самостоятельная работа Выполнение кинематических схем устройств мехатронных систем
Теоретические основы разработки и моделирования
отдельных несложных модулей и мехатронных систем
Самостоятельная классная работа
Выполнение кинематических схем устройств мехатронных систем
Цель работы привитие навыка чтения и выполнения сложных
кинематических схем элементов мехатронных устройств
Задание на работу
1 Описать сложную зубчатую передачу, по индивидуальному варианту.
2 Вычертить ее кинематическую схему в программной среде AutoCad.
3 Определить общее передаточное отношение механизма.
4 Составить спецификацию схемы.
1 Пример описания работы кинематической схемы механизма
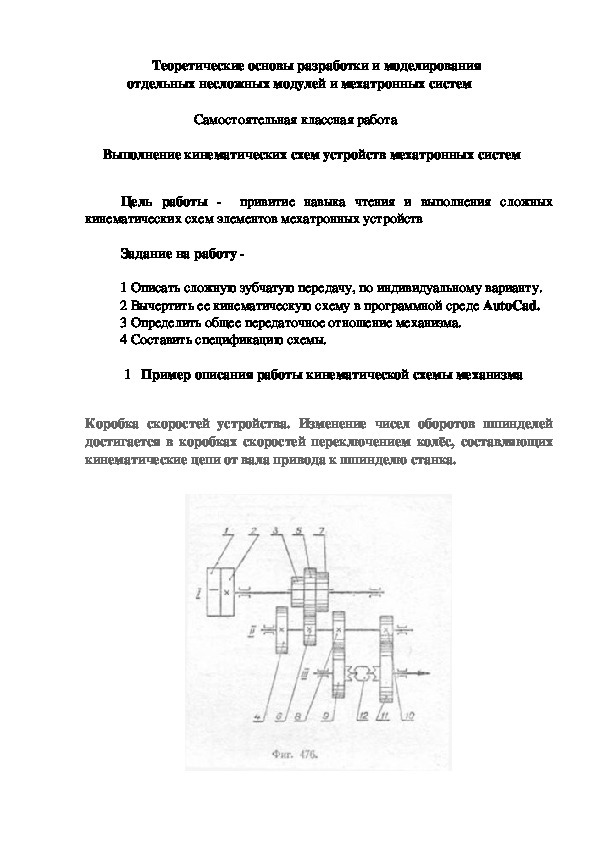
Коробка скоростей устройства. Изменение чисел оборотов шпинделей
достигается в коробках скоростей переключением колёс, составляющих
кинематические цепи от вала привода к шпинделю станка.На конце ведущего вала I насажены рабочий шкив 2 и холостой шкив 1,
которые приводятся в движение от трансмиссионного вала или
электродвигателя. На валу вдоль его оси могут перемещаться по на
правляющей шпонке зубчатые колёса 3, 5 и 7, изготовленные в виде
одного блока. На промежуточном валу II закреплены зубчатые колёса 4,
6, 8 и 10. Передвигая блок зубчатых колёс 3, 5 и 7 вдоль вала I влево,
можно включать в зацепление колесо 3 с колесом 4; в среднем положении
блока сцеплены зубчатые колёса 5 и 6; передвигая блок вправо, можно
включать в зацепление колёса 7 и 8. Это даст возможность при одном и
том же числе оборотов ведущего вала I получить на валу II три разных
значения чисел оборотов. Наибольшее число оборотов вала II получается
при зацеплении зубчатых колёс 5 и 6 и наименьшее—при зацеплении
колёс 3 и 4.
На валу III, который является шпинделем станка, свободно посажены
зубчатые колёса 9 и 11, находящиеся в постоянном зацеплении с
зубчатыми колёсами 8 и 10. Между зубчатыми колёсами 9 и 11 на шпин
деле передвигается по направляющей шпонке кулачкова
двусторонняя муфта 12, которая своими выступами может
сцепляться с выступами на ступицах зубчатых колёс 9 и 11 и соединять с
валом III то
одно, то другое зубчатое колесо. Таким образом, переключение
кулачковой муфты вправо или влево даёт возможность удвоить диапазон
скоростей на шпинделе. Следовательно, шпиндель токарного станка
имеет всего шесть шпинделей, т. е. может вращаться с шестью
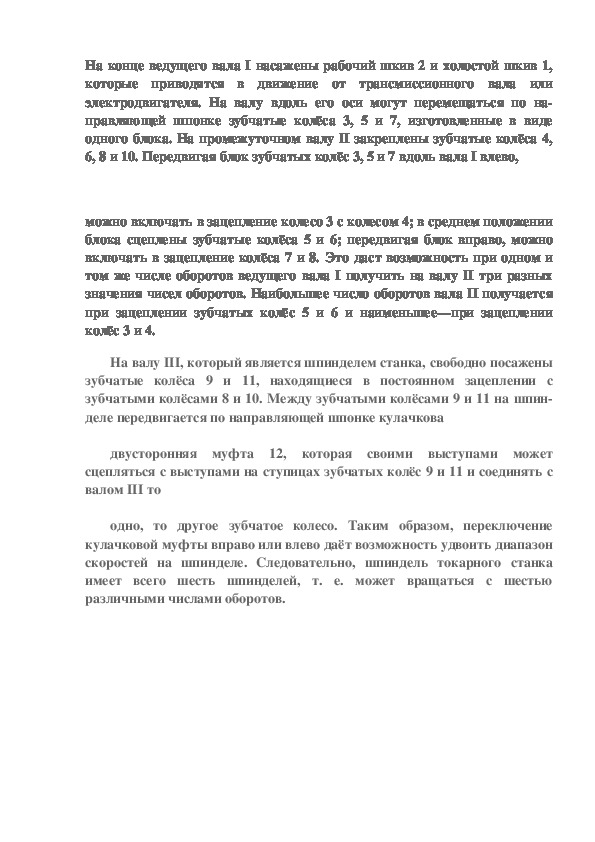
различными числами оборотов.Пример описания работы кинематической схемы механизма
Коробка скоростей устройства. Изменение чисел оборотов шпинделей
достигается в коробках скоростей переключением колёс, составляющих
кинематические цепи от вала привода к шпинделю станка.
На конце ведущего вала I насажены рабочий шкив 2 и холостой шкив 1,
которые приводятся в движение от трансмиссионного вала или
электродвигателя. На валу вдоль его оси могут перемещаться по на
правляющей шпонке зубчатые колёса 3, 5 и 7, изготовленные в виде
одного блока. На промежуточном валу II закреплены зубчатые колёса 4,
6, 8 и 10. Передвигая блок зубчатых колёс 3, 5 и 7 вдоль вала I влево,
можно включать в зацепление колесо 3 с колесом 4; в среднем положенииблока сцеплены зубчатые колёса 5 и 6; передвигая блок вправо, можно
включать в зацепление колёса 7 и 8. Это даст возможность при одном и
том же числе оборотов ведущего вала I получить на валу II три разных
значения чисел оборотов. Наибольшее число оборотов вала II получается
при зацеплении зубчатых колёс 5 и 6 и наименьшее—при зацеплении
колёс 3 и 4.
На валу III, который является шпинделем станка, свободно посажены
зубчатые колёса 9 и 11, находящиеся в постоянном зацеплении с
зубчатыми колёсами 8 и 10. Между зубчатыми колёсами 9 и 11 на шпин
деле передвигается по направляющей шпонке кулачковая
двусторонняя муфта 12, которая своими выступами может
сцепляться с выступами на ступицах зубчатых колёс 9 и 11 и соединять с
валом III то одно, то другое зубчатое колесо. Таким образом,
переключение кулачковой муфты вправо или влево даёт возможность
удвоить диапазон скоростей на шпинделе. Следовательно, шпиндель
токарного станка имеет всего шесть шпинделей, т. е. может вращаться с
шестью различными числами оборотов.