Поделиться

Структура ПЛК
Первые ПЛК появились в 1967 г. и были предназначены для локальной автоматизации наиболее часто встречающихся в промышленности технологических задач, которые описывались пре- имущественно логическими уравнениями. ПЛК с успехом заменили
блоки релейной автоматики и устройства жесткой логики на интегральных микросхемах малой и средней степени интеграции. Отсюда и название — программируемый логический контроллер, или Programmable Logic Controller (PLC).
Аппаратные средства, программное обеспечение и конструктивное исполнение ПЛК должны удовлетворять следующим требованиям:
· универсальная структура изделия, которая позволяет свести каждую новую разработку к выбору среди существующих аппаратных средств и разработке новой управляющей программы;
· высокая надежность;
· удобство обслуживания и эксплуатации;
· простое программирование и перепрограммирование устройства (возможно не специалистом в области компьютерной техники);
· стандартизация входов и выходов для непосредственного под- ключения датчиков и исполнительных устройств;
· меньшие габариты и энергопотребление, чем у аналогичных блоков релейной автоматики и жесткой логики;
· конкурентоспособность по стоимости со схемами на основе релейной техники, жесткой полупроводниковой логики, возможность обмена информацией с системой управления верхнего уровня.
Тридцатилетний опыт технического развития и эксплуатации привел к выделению ПЛК в отдельный класс микропроцессорных систем.
ПЛК представляют собой завершенную форму микропроцессорных средств, которые характеризуются оригинальной архитектурой и специальным программным обеспечением. Реализованные решения в области аппаратных и программных средств преследуют цель обеспечения максимально возможного уровня надежности при работе в промышленных условиях эксплуатации. Весь комплекс этих решений можно подразделить на следующие функциональные группы:
· специальная архитектура центрального процессора ПЛК;
· использование различных способов резервирования;
· использование программных методов защиты информации;
· специальная схемотехника УСО;
· организация специальных быстродействующих магистралей связи с удаленными УСО;
· специальное конструктивное исполнение.
![]()
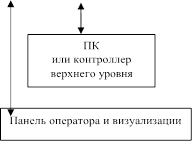
 Структура
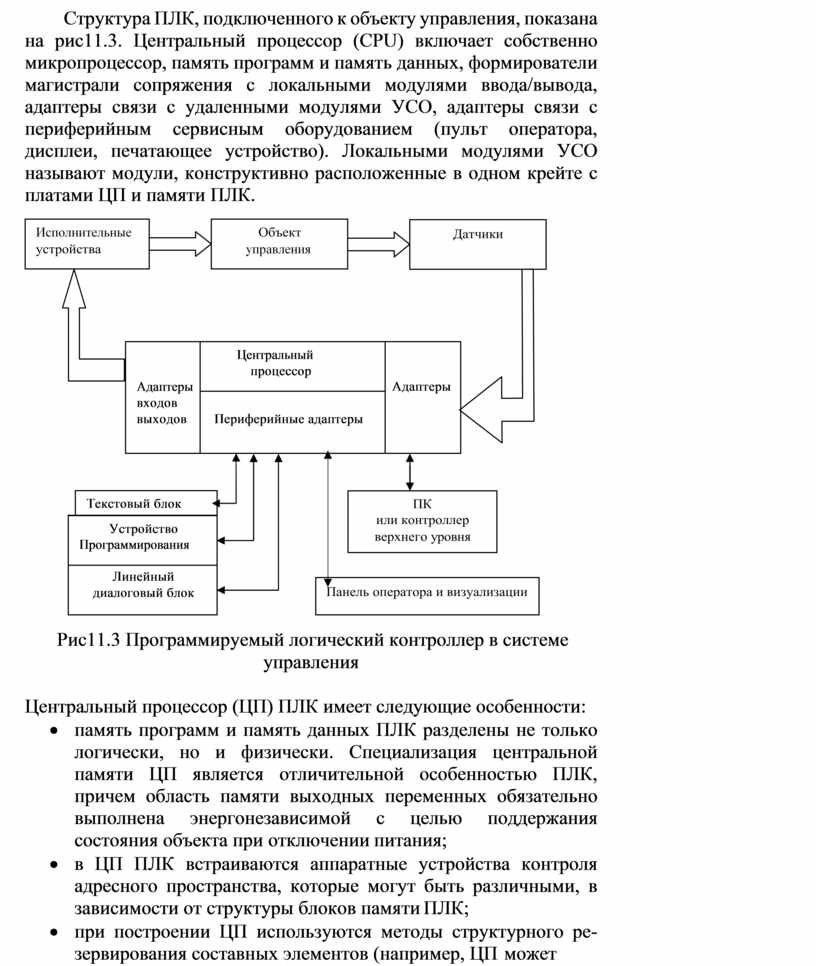
ПЛК, подключенного к объекту управления, показана на рис11.3. Центральный
процессор (CPU) включает собственно микропроцессор, память программ и память
данных, формирователи магистрали сопряжения с локальными модулями ввода/вывода,
адаптеры связи с удаленными модулями УСО, адаптеры связи с периферийным
сервисным оборудованием (пульт оператора, дисплеи, печатающее устройство).
Локальными модулями УСО называют модули, конструктивно расположенные в одном
крейте с платами ЦП и памяти ПЛК.
Структура
ПЛК, подключенного к объекту управления, показана на рис11.3. Центральный
процессор (CPU) включает собственно микропроцессор, память программ и память
данных, формирователи магистрали сопряжения с локальными модулями ввода/вывода,
адаптеры связи с удаленными модулями УСО, адаптеры связи с периферийным
сервисным оборудованием (пульт оператора, дисплеи, печатающее устройство).
Локальными модулями УСО называют модули, конструктивно расположенные в одном
крейте с платами ЦП и памяти ПЛК.
|
Адаптеры входов выходов |
Центральный процессор |
Адаптеры |
|
Периферийные адаптеры |
|
|
Текстовый блок |
|
Устройство Программирования |
|
|
Линейный диалоговый блок |
|
![]()
![]()
![]()
 Рис11.3 Программируемый
логический контроллер в системе управления
Рис11.3 Программируемый
логический контроллер в системе управления
Центральный процессор (ЦП) ПЛК имеет следующие особенности:
· память программ и память данных ПЛК разделены не только логически, но и физически. Специализация центральной памяти ЦП является отличительной особенностью ПЛК, причем область памяти выходных переменных обязательно выполнена энергонезависимой с целью поддержания состояния объекта при отключении питания;
· в ЦП ПЛК встраиваются аппаратные устройства контроля адресного пространства, которые могут быть различными, в зависимости от структуры блоков памяти ПЛК;
· при построении ЦП используются методы структурного ре- зервирования составных элементов (например, ЦП может
включать два обрабатывающих блока, которые объединены между собой блоками принятия решений; при этом сигналы выходных воздействий формируются только в случае, когда они одинаковы для обоих блоков; отказавшая структура выявляется с помощью встроенных тестовых программ);
· несколько сторожевых таймеров, входящих в состав ЦП ПЛК, контролируют строго определенное время выполнения одного цикла управляющей программы и отдельных ее частей;
· ЦП средних и мощных ПЛК часто выполнены многопро- цессорными, причем распределение задач между отдельными процессорами обусловлено типовыми алгоритмами функционирования ПЛК, а способы передачи информации между процессорами подчиняются жесткому требованию реализации программы управления объектом за строго определенный временной интервал.
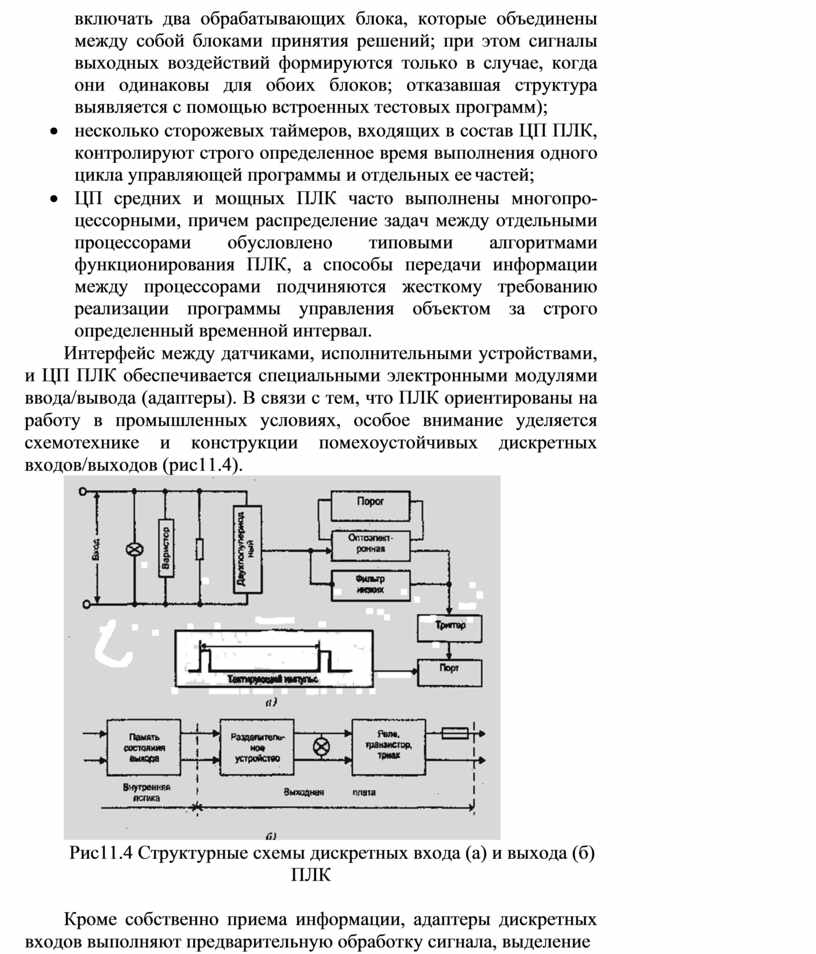
Интерфейс между датчиками, исполнительными устройствами, и ЦП ПЛК обеспечивается специальными электронными модулями ввода/вывода (адаптеры). В связи с тем, что ПЛК ориентированы на работу в промышленных условиях, особое внимание уделяется схемотехнике и конструкции помехоустойчивых дискретных входов/выходов (рис11.4).
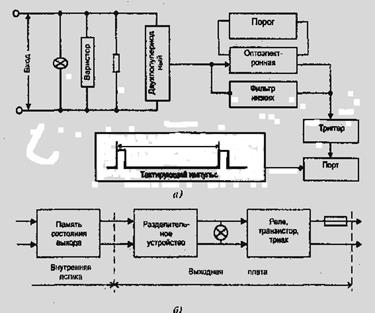
Рис11.4 Структурные схемы дискретных входа (а) и выхода (б)
ПЛК
Кроме собственно приема информации, адаптеры дискретных входов выполняют предварительную обработку сигнала, выделение
полезного сигнала из зашумленного, реализуют развязку сигналов с различными уровнями мощности. Уровни постоянного и перемен- ного напряжений входного дискретного сигнала стандартизированы:
=24 В, -130 В, -240 В. Адаптеры дискретных выходов должны, кроме гальванической развязки, обеспечивать определенную мощность сигнала, необходимую для управления исполнительным устройством. Стандартные параметры выходов следующие: постоянное напряжение 24 В, переменное напряжение 130 В и 240 В при силе тока до 10 А. Выходным устройством могут быть биполярные или полевые транзисторы, реле, триод, тиристор. Гальваническая развязка обеспечивается разделительным трансформатором па переменном токе или оптронами на постоянном токе.
ПЛК непрерывно развивались в сторону усложнения. Постепенно, не изменяя названия, они стали выполнять функции регулирования. В составе ПЛК появились адаптеры ввода аналоговых сигналов, содержащие АЦП, и адаптеры вывода аналоговых сигналов на основе ЦАП. Система команд ПЛК пополнилась командами обработки двоичных кодов, ПЛК стали выполнять операции сравнения и алгебраические вычисления. Чем же отличается выполнение этих действий в ПЛК и в универсальном микропроцессорном контроллере или промышленном компьютере?

Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.