Можно ли увидеть будущее? Скорее всего, нет. Будущее однозначно не определено. Но ничто не мешает нам придумать его прямо сейчас. Сегодня уже не только авторы научно-фантастических романов осмеливаются рассматривать возможности развития человеческого общества в будущем. Актуальность данной работы заключается в том, что мы живем в эпоху глобального научного переворота, темпы познания мира непрерывно возрастают.
Муниципальное казенное общеобразовательное учреждение средняя
общеобразовательная школа с углубленным изучением отдельных предметов
пгт Демьяново Подосиновского района Кировской области
Технологии будущего
проект
Проект выполнил
Горохов Валерий
Ученик 11«а» класса
Руководитель: Ногтева С.В.
учитель ОП и технологиипгт Демьяново 2015 год
Содержание
Введение………………………………………………………………………….........
I. Работа с литературой............................………………………………………5
1.1 Нанороботы …….....……………….……...……………………………..5
1.1.1 Уровень развития технологии………………..………………….5
1.1.2 Технология Нанороботов………………………………………...6
1.1.3 Конструкция Нанороботов……………………………………….6
1.1.4 Двигательный аппарат…………………………………………....7
1.1.5 Потенциальная сфера применения………………………………7
1.2 Беспилотный автомобиль Google….……………………………………8
1.2.1 История создания…………………………………………………8
1.2.2 Описание…………………………………………………………..8
1.2.3 Монетизация………………………………………………………9
1.2.4 Недостатки системы……….……………………………………...9
1.2.5 Стоимость…………………………………………………...……10
1.3 Умный дом………………………………………………………………11
1.3.1 История…………………………………………………………11
1.3.2 Технологии………………..……………………………………12
1.3.3 Система управления……....……………………………………12
1.3.4 Система связи………………..…………………………………12
1.3.5 Система освещения…………….………………………………14
1.3.6 Система электропитания здания………………………………14
1.3.7 Система безопасности и мониторинга……...…..…………….14
1.3.8 Стоимость……...……………………….………………………15
1.4 Роботы………………....………………………………………………16
1.4.1 Хронология…………..…………………………………………16
1.4.2 Типы роботов………………...…………………………………16
1.4.3 Промышленные роботы…………………..……………………18
1.4.4 Медицинские роботы………………………..…………………18
1.4.5 Бытовые роботы…………………………...……………………19
1.4.6 Боевые роботы……………………..……………………………19
1.4.7 Трагические факты……………..……………………………….20
2II. Исследование..……………….……..………………….……………………21
1.1 Анкетирование…………………...………………………………….….21
III. Разработка продукта………………...…….…….…………………………22
3.1 Первоначальные идеи продукта….........................................................22
3.2 Дизайн – анализ…………………………………………...…….…..….23
3.3 Разработка буклета………………………………………….….………24
3.4 Готовый буклет……………………....…………………………………25
Выводы………...…………………………………………………………….…..….26
Самоанализ…………………………………………………….………………..…..27
Список литературы……………………………………………..…………..………28
Приложения………………………………………………………………...……….29
3Введение
Можно ли увидеть будущее? Скорее всего, нет. Будущее однозначно не
определено. Но ничто не мешает нам придумать его прямо сейчас. Сегодня уже
не только авторы научнофантастических романов осмеливаются рассматривать
возможности развития человеческого общества в будущем. Футурологи давно
разрушили все вообразимые границы времени и пространства, указывая
конкретные даты будущих событий. Актуальность данной работы заключается в
том, что мы живем в эпоху глобального научного переворота, темпы познания
мира непрерывно возрастают. За последние несколько десятилетий человечество
обрело больше научных знаний, чем за всю предыдущую историю. Логично
предположить, что к концу XXI века объем научных знаний удвоиться еще не
раз. Передо мной возникла
Проблема: Хочу, чтобы в будущем у всех людей была жизнь наиболее
комфортной, но на данный момент представления людей об этом недостаточны.
Способы решения данной проблемы: создание информационной презентации,
проведение классного часа, создание буклетов, фильм, написании эссе.
Наиболее доступный для меня способ решения проблема – создание буклета.
Материал данной работы (буклет) можно использовать на уроках информатики
и физики. Данная работа дала возможность выразить себя. Создавая проект, я
приобрел новые знания, в частности об изобретениях которые ждут нас в
будущем.
Цель:
Создать буклет, информирующий учащихся об изобретениях будущего.
Задачи:
1.Найти и проанализировать информацию.
42.Провести исследование, сколько из учеников не имеют представления о
технологиях будущего.
3.Наметить примерный план реализации проекта.
4.Осуществить все этапы проекта.
5.Оформления документацию по проекту, сделать буклет, познакомить с
результатами проекта.
I.Работа с литературой
Нанор ботыоо
или наноб тыоо
1.1 Нанороботы
— роботы,
,
размером сопоставимые
с молекулой(менее 10 нм), обладающие функциями движения, обработки и
передачи информации, исполнения программ.
Нанороботы, способные к созданию своих копий, то есть самовоспроизводству,
называются репликаторами. Возможность создания нанороботов рассмотрел в
своей книге «Машины создания» американский учёный Эрик Дрекслер.
Другие определения описывают наноробота как машину, способную точно
взаимодействовать с наноразмерными объектами или способной манипулировать
объектами в наномасштабе. Вследствие этого, даже крупные аппараты, такие
как атомносиловой микроскоп можно считать нанороботами, так как он
производит манипуляции объектами на наноуровне. Кроме того, даже обычных
роботов, которые могут перемещаться с наноразмерной точностью, можно
считать нанороботами.
Кроме слова «наноробот» также используют выражения «нанит» и
«наноген», однако, технически правильным термином в контексте серьёзных
инженерных исследований все равно остается первый вариант.
1.1.1 Уровень развития технологии
На данный момент (2009), нанороботы находятся в научно
исследовательской стадии создания. Некоторыми учёными утверждается, что
уже созданы некоторые компоненты нанороботов. Разработке компонентов
наноустройств и непосредственно нанороботам посвящен ряд международных
научных конференций.
5Уже созданы некоторые примитивные прототипы молекулярных машин.
Например, датчик, имеющий переключатель около 1,5 нм, способный вести
подсчет отдельных молекул в химических образцах[11]. Недавно университет
Райсапродемонстрировал наноустройства для использования их в регулировании
химических процессов в современных автомобилях.
Одним из самых сложных прототипов наноробота является «DNA box»,
созданный в конце 2008 года международной группой под руководством
Йоргена Кьемса. Устройство имеет подвижную часть, управляемую с помощью
добавления в среду специфических фрагментов ДНК. По мнению Кьемса,
устройство может работать как «ДНКкомпьютер», т.к на его базе возможна
реализация логических вентилей. Важной особенностью устройства является
метод его сборки, так называемый ДНК оригами (англ.), благодаря которому
устройство собирается в автоматическом режиме.
В 2010 году были впервые продемонстрированы нанороботы на основе
ДНК, способные перемещаться в пространстве.
1.1.2 Технология Нанороботов
Так как нанороботы имеют микроскопические размеры, то их, вероятно,
потребуется очень много для совместной работы в решении микроскопических и
макроскопических задач. Рассматривают стаи нанороботов, которые не
способны к репликации (т. н. «утилитарный туман») и которые способны к
самостоятельной репликации в окружающей среде («серая слизь» и др.
варианты).
Некоторые сторонники нанороботов в ответ на сценарий «серой слизи»
высказывают мнение о том, что нанороботы способны к репликации только в
ограниченном количестве и в определенном пространстве нанозавода. Кроме
того, ещё только предстоит разработать процесс саморепликации, который
сделает данную нанотехнологию безопасной. Кроме того, свободная
саморепликация роботов является гипотетическим процессом и даже не
рассматривается в текущих планах научных исследований.
Однако, имеются планы по созданию медицинских нанороботов, которые
будут впрыскиваться в пациента и выполнять роль беспроводной связи на
наноуровне. Такие нанороботы не могут быть получены в ходе самостоятельного
копирования, так как это вероятно приведет к появлению ошибок при
копировании, которые могут снизить надежность наноустройства и изменить
выполнение медицинских задач. Вместо этого нанороботов планируется
изготавливать на специализированных медицинских нанофабриках.
1.1.3 Конструкция нанороботов
6В связи с развитием направления научных исследований нанороботов,
сейчас наиболее остро стоят вопросы их конкретного проектирования. Одной из
инициатив по решению этой проблемы является «Сотрудничество по разработке
нанофабрик» , основанное Робертом Фрайтасом и Ральфом Меркле в 2000 году,
деятельность которого сосредоточена на разработке практической программы
исследований, которая направлена на создание контролируемой алмазной
механосинтетической нанофабрики, которая будет способна к производству
медицинских нанороботов на основе алмазных соединений.
Для этого разрабатываются технологии зондирования, управления
силовыми связями между молекулами и навигации. Создаются проекты и
прототипы инструментария для манипуляций, двигательного аппарата
(молекулярные моторы) и "бортового компьютера"
1.1.4 Двигательный аппарат
Молекулярные двигатели — наноразмерные машины, способные
осуществлять вращение при приложении к ним энергии. Главной особенностью
молекулярных моторов являются повторяющиеся однонаправленные
вращательные движения, происходящие при подаче энергии. Для подачи энергии
используются химический, световой метод, а также метод туннелирования
электронов.
Кроме молекулярных двигателей, создаются также наноэлектродвигатели,
сходные по конструкции с макроскопическими аналогами, проектируются
двигатели, принцип работы которых основывается на использовании квантовых
эффектов.
1.1.5 Потенциальная сфера применения
Полезное применение наномашин, если они появятся, планируется в
медицинских технологиях, где они могут быть использованы для выявления и
уничтожения раковых клеток. Также они могут обнаруживать токсичные
химические вещества в окружающей среде и измерять уровень их концентрации.
Ранняя диагностика рака и целенаправленная доставка лекарств в раковые
клетки
Биомедицинский инструментарий
Хирургия
Фармакокинетика
7
Мониторинг больных диабетом
Производство посредством молекулярной сборки нанороботами
устройства из отдельных молекул по его чертежам
Военное применение в качестве средств наблюдения и шпионажа, а также
в качестве оружия. Потенциальные возможности использования нанороботов
в качестве оружия демонстрируются в некоторых фантастических
произведениях (Терминатор 2: Судный день, День, когда остановилась Земля
(фильм, 2008), Бросок кобры).
Космические исследования и разработки (например, зонды фон Неймана)
1.2 Беспилотный автомобиль Google
Беспилотный автомобиль Google — проект компанииGoogle по
развитию технологии беспилотного автомобиля. В настоящий момент проект
реализует лаборатория Google X. Возглавляет проект инженер Себастьян Тран,
директор лаборатории искусственного интеллекта Стенфордского
университета, один из создателей сервиса Google Street View. Эта команда
занималась проектом Стэнли (англ. Stanley) в Стенфордском университете,
который получил приз в $2 млн от Министерства обороны США, победив в 2005
году в конкурсе DARPA Grand Challenge. Команда, разрабатывающая
беспилотный автомобиль,
также часто называемый Гугломобиль,
включает15 инженеров Google — Крис Урмсон, Майк Монтемерло, и Энтони
Левандовски, которые ранее работали над проектом DARPA Grand and Urban
Challenges.
1.2.1 История создания
В июне 2011 года компания Google успешно пролоббировала закон штата
Невада, разрешающий использование беспилотных автомобилей на дорогах
общего пользования. В Google отказались пояснить, почему выбор был сделан в
пользу Невады.
В мае 2012 Департамент транспортных средств штата Невада (Nevada
Department of Motor Vehicles, DMV) выдал Google соответствующую лицензию,
а независимый наблюдательный комитет при DMV, осуществлявший надзор за
процедурой выдачи первой лицензии на беспилотный автомобиль, утвердил
дизайн номерного знака с символом бесконечности на красном фоне.
8В сентябре 2012 власти штата Калифорния легализовали использование
автомобилей с функцией автопилота.
1.2.2 Описание
Система использует информацию, собранную сервисом Google Street
View, видеокамеры, датчик LIDAR, установленный на крыше, радары в передней
части авто и датчик, подключенный к одному из задних колёс, который помогает
определить позицию автомобиля на карте.
В 2010 году Google протестировал несколько автомобилей,
оборудованных такой системой. В реальных условиях, без участия человека,
автомобиль проехал около 1600 км полностью автономно и ещё 225 308 км с
частичным участием человека.
Единственное дорожнотранспортное
происшествие произошло, когда другой автомобиль въехал в гуглмобиль,
стоящий на светофоре. По утверждению Google, их автоматизированная система
может снизить количество ДТП, травм и смертей, в то же время, используя
топливо и дороги более эффективно.
В проекте
участвуют 10 автомобилей: 6 Toyota
Prius, 3 Lexus
RX450h и 1 Audi TT, а также 12 водителей и15 инженеров.
В 2012 году компания Google сообщила в своём блоге о том, что их
автомобили проехали уже 300 тысяч миль(более 480 тысяч километров) с
минимальным участием человека. Это позволило компании снизить экипаж
автомобилей до одного человека. Google также объявила, что пополнила парк
беспилотных автомобилей гибридным кроссовером Lexus RX450h. Они
необходимы для тестирования системы на участках со сложным рельефом.
В апреле 2014 года компания объявила, что их автомобили прошли почти
1 100 000 км. В конце мая, Google показал новый прототип своего беспилотного
автомобиля, который не имеет ни руля, ни педалей газа и тормоза, и на 100%
автономны.
1.2.3 Монетизация
У Google нет немедленных планов по монетизации системы, но в компании
надеются развить бизнесмодель, в том числе по продаже лицензий
автопроизводителям.
Юрист
из Автотранспортной инспекции Калифорнии
выразил
озабоченность тем,
что «данная технология намного опережает
законодательство во многих областях» — закон штата гласит, что «любое
транспортное средство должно управляться человеком» Согласно the New York
9Times, законодатели обсуждают необходимость обновления законодательства
для стимулирования развития беспилотных транспортных средств, поскольку
«технологии развиваются так быстро, что есть опасность опережения ими
существующих законов, некоторые из которых датируются эрой каретных
повозок
В конце августа 2013 года стало известно о том, что Google планирует
выпуск своего собственного автомобиля, а также инвестировал $250 млн. в
службу такси Uber, которую планирует укомплектовать своими беспилотными
автомобилями.
1.2.4 Недостатки системы
По состоянию на март 2013 года, автомобили Google не могут
передвигаться под проливным дождём и в условиях заснеженной местности.
Связано это с тем, что идентификация местности производится посредством
сравнения заблаговременно отснятых фотографий с результатами визуализации
окружающего ландшафта сканирующими системами автомобиля. Благодаря
такому подходу система может отличить пешехода от обычного телеграфного
столба, но в условиях плохих погодных условий система сделать это бессильна.
По состоянию на 28 августа 2014 года автомобили Google не в состоянии
распознавать временные сигналы светофора. Они не могут отличать пешеходов
от полицейских или скомканную бумагу от камня. Что также немаловажно, они
не умеют парковаться. Google планирует исправить эти недостатки к 2020 году.
1.2.5 Стоимость
По приблизительным подсчетам, нынешняя стоимость тестового образца
беспилотного автомобиля от Google составляет 150 тысяч долларов без
налогов и пошлин. Из этой суммы только 70 тысяч долларов стоит оптический
датчик LIDAR. Далеко не каждый автолюбитель может себе позволить иметь
такое авто.
101.3 Умный дом
людей
Уо
мный дом
при
помощи
(англ. smart home МФА: sma:t haus, также англ. intelligent
building,рус. АСУЗ) — жилой дом современного типа, организованный для
проживания
автоматизации
и высокотехнологичных устройств. Под «умным» домом следует понимать
систему, которая обеспечивает комфорт (в том числе безопасность),
и ресурсосбережение для всех пользователей. В простейшем случае она должна
уметь распознавать конкретные ситуации, происходящие в доме, и
соответствующим образом на них реагировать: одна из систем может управлять
поведением других по заранее выработанным алгоритмам. Кроме того, от
автоматизации нескольких подсистем обеспечивается синергетический
эффект для всего комплекса.
Это проще понять, если представить, например, что система отопления
никогда не сможет работать против системы кондиционирования. А отопление
осуществляется не только по погоде, но и с учетом целого ряда других
факторов. От силы ветра, по предсказанию, от времени суток (ночью
комфортная температура меньше).
Можно считать,
что это наиболее прогрессивная концепция
взаимодействия человека (пользователей) с жилым пространством, когда в
автоматизированном режиме в соответствии с внешними и внутренними
условиями задаются и отслеживаются режимы работы всех инженерных систем
и электроприборов.
11В этом случае исключается необходимость пользоваться
несколькими пультами при просмотре ТВ, десятками выключателей при
при
управлении
управлении вентиляционными и отопительными
системами,
сигнализации,
системами видеонаблюдения и охранной
моторизированными воротами и прочим.
освещением,
отдельными
блоками
1.3.1 История
В 1995 году разработчики технологий Java предрекали одним из основных
назначений для этой технологии увеличения интеллекта бытовых приборов —
например, холодильник сам будет заказывать продукты из магазина.
Промышленного распространения эта идея не получила, но такие компании,
как Miele и Siemens, уже выпускают бытовую технику с возможностью
включения в «умный дом».
Осенью 2012 года компания Panasonic анонсировала полномасштабное
производство систем управления энергией SMARTHEMS, предназначенных для
«умных домов». Panasonic обещает ввести совместимость с системой HEMS во
всю линейку своих бытовых приборов, таких как: кондиционеры, «умная»
кухонная техника и системы горячего водоснабжения EcoCute.
Новая
система AiSEG позволяет связать все оборудование и домашние устройства, в
единую сеть, организовав отображение информации о работе солнечных батарей,
расходе электричества, газа и воды и автоматически контролируя работу
бытовых приборов с помощью протокола ECHONET Lite.
1.3.2 Технологии
Под термином «умный дом» обычно понимают интеграцию следующих
систем в единую систему управления зданием:
Системы управления и связи
Система отопления, вентиляции и кондиционирования
Система освещения
Система электропитания здания
Система безопасности и мониторинга
121.3.3 Система управления
Управление с одного места аудио,
видеотехникой, домашним
кинотеатром, мультирум.
Удалённое управление электроприборами, приводами механизмов и всеми
системами автоматизации. Электронные бытовые приборы в умном доме
могут быть объединены в домашнюю Universal Plug’n’Play — сеть с
возможностью выхода в сети общего пользования.
Механизация
здания
(открытие/закрытие
ворот, шлагбаумов,
электроподогрев ступеней и т. п.)
1.3.4 Система связи
Сюда относятся телефонная связь и локальная сеть здания. Существует
несколько платформ и протоколов, с помощью которых связываются
подсистемы умного дома:
распределённых
шинных
а также такими системами,
LanDrive — наиболее доступная на сегодняшний день платформа для
построения
систем
управления внутренним и уличным освещением, силовыми нагрузками,
электроприборами,
как отопление,
кондиционирование, вентиляция, охранная сигнализация, контроль доступа и
протечек воды. Также возможно управление аудио и видеотехникой,
домашними
рольставнями, шторами,
воротами, насосами, двигателями. В основном ориентирована на применение
в составе «умного дома», но в последнее время всё чаще применяется в
системах учёта и сбережения энергоресурсов, контроля доступа, охранно
пожарных системах.
кинотеатрами, жалюзи,
TELETASK
система домашней
автоматизации для зданий и помещений, где человек находится
продолжительное время (квартира, коттедж, офис, гостиница и т.д.)
(шина/протокол AUTOBUS)
EIB/KNX (European Installation Bus — «Европейская инсталляционная
шина»).
13
Smartbus бюджетные распределенные системы Умного дома. Открытый
протокол на основе RS485 интерфейса, разработанный и запатентованный
международной корпорацией Smart Home Group.
LON (LonWorks)
Helvar — для систем управления освещением использует протокол DALI
и DSI.
X10 — протокол управления электроприборами. Сигнал передается по
электрическим проводам либо в радиодиапазоне. Недостатки —
низкие скорость передачи информации и помехозащищенность, проблема
ложного срабатывания,
отсутствие обратной связи приёмника с
передатчиком, возможны конфликты устройств X10 разных производителей
и несанкционированный доступ к устройствам X10 по электросети.
ZWave — запатентованный беспроводный протокол связи, разработанный
для домашней автоматизации, в частности для контроля и управления на
жилых и коммерческих объектах. Технология использует маломощные и
миниатюрные радиочастотные модули, которые встраиваются в бытовую
электронику и различные устройства, такие, как освещение, отопление,
контроль доступа, развлекательные системы и бытовую технику.
ONENET — открытый протокол беспроводной сети передачи данных,
разработанный для целей автоматизации зданий и управления
распределёнными объектами.
1Wire — технология, которая позволяет связать многие датчики и
приборы в одну сеть, управление в которой на себя берёт персональный
компьютер. Для передачи данных в такой сети используется всего один
провод. Отличается дешевизной и простотой установки.
Важно отметить, что все инженерные подсистемы «умного дома» должны иметь
возможность работать в автономном режиме. В случае, если какаято из
подсистем вышла из строя, то и вся система не сможет исправить проблему,
поскольку «умный дом» является надстройкой над остальными инженерными
системами.
1.3.5 Система освещения
14Система освещения (Lighting control systems, LCS) контролирует уровень
освещенности в помещении, в том числе для экономии электроэнергии за счет
рационального использования естественного освещения. Некоторые подсистемы:
автоматика для включения/выключения света в заданное время суток
датчики движения для включения света только тогда, когда в помещении
ктото находится
автоматика для открытия/закрытия ставней, жалюзи, для регулировки
прозрачности специальных оконных стекол.
1.3.6 Система электропитания здания
Системы электропитания обеспечивают бесперебойное питание, в том числе
за счет автоматического переключения на альтернативные источники
электропитания. Некоторые подсистемы:
Автоматический ввод резерва
промышленные ИБП
дизельгенераторы
1.3.7 Система безопасности и мониторинга
В систему безопасности и мониторинга входят следующие подсистемы:
система видеонаблюдения
система контроля доступа в помещения
Охраннопожарная сигнализация (в том числе контроль утечек газа)
Телеметрия — удалённое слежение за системами
Система защиты от протечек — автоматическая блокировка
водоснабжения при протечке и заливе помещения. Состоит из
контролирующего устройства,
специальных кранов и датчиков,
детектирующих затопление (Аквасторож, Neptun, Гидролок и другие)
15
GSMмониторинг — удалённое информирование об инцидентах в доме
(квартире, офисе, объекте) и управление системами дома через телефон. В
некоторых системах при этом можно получать голосовые инструкции по
планируемым управляющим воздействиям, а также голосовые отчеты по
результатам выполнения действий.
IPмониторинг объекта
1.3.8 Стоимость
Типовая стоимость для разного рода квартир составит: для
двухкомнатной квартиры не менее 3500 евро; для трехкомнатной квартиры не
менее 5000 евро, если же речь идет о двухэтажном коттедже с участком, то тут
цена начинается с 8000 евро. Как обычно, не менее 70% всех затрат уйдет на
закупку оборудования, разнообразных монтажных материалов от труб и кабелей
до крепежа. Порядка 30% от стоимости проекта уйдет на монтажные работы,
настройку
запуск.
системы
ее
и
1.4 Роботы
Роботы – это механические помощники человека, способные выполнять
операции по заложенной в них программе и реагировать на окружение.
16Трансгуманистическое значение робототехники состоит не только в том, что эта
область связана с киборгизацией и искусственным интеллектом, но кроме того, –
развитие роботов сможет значительно изменить образ жизни человека, хотя и не
меняя при этом его самого.
С момента своего появления полвека назад роботы прошли путь от
примитивных механизмов до сложных, эффективных устройств, во многом
превзойдя по своим возможностям человека. В ближайшие десятилетия всё
более совершенные роботы станут незаменимыми помощниками людей и смогут
взять на себя обеспечение большей части потребностей цивилизации.
1.4.1 Хронология
Конец XIX века — русский инженер Пафнутий Чебышёв придумал
механизм — стопоход, обладающий высокой проходимостью.
1898 — Никола
Тесла разработал
и
продемонстрировал
миниатюрное радиоуправляемое судно.
1921 — чешский писатель Карел Чапек представил публике пьесу под
названием «Р. У. Р.» («Россумские Универсальные Роботы»)[8], откуда и
взяло начало слово «робот» (от словацк. robota).
1930е — появились конструкции внешне напоминающих человека
устройств, способных выполнять простейшие движения и воспроизводить
фразы по команде человека. Имеются подтвержденные данные о 38
подобных роботах, созданных преимущественно компанией Вестингауз,
немецкими и голландскими инженерами в целях рекламы. Первый такой
«робот» Televox был сконструирован американским инженером
Джеймсом Уэнсли для Всемирной выставки в НьюЙорке в 1927 году.[9]
1950е — для работы с радиоактивными материалами стали разрабатывать
механические манипуляторы, которые копировали движения рук человека,
находящегося в безопасном месте.
1960 — дистанционно управляемая тележка с манипулятором,
телекамерой и микрофоном применялась для осмотра местности и сбора
проб в зонах высокой радиоактивности.
1968 — японская компания Kawasaki Heavy Industries, Ltd. получила
лицензию на производство робота от американской фирмы Unimation Inc. и
собрала своего первого промышленного робота. С тех пор Япония начала
неуклонное движение к тому, чтобы стать мировой столицей роботов — с
более чем 130 компаниями, вовлеченных в их производство. Изначально
сконструированные в США, первые роботы Японии импортировались в
17
малых количествах. Инженеры изучали их и применяли в производстве в
таких специфических работах, как сварка и распыление. В 70х годах были
разработаны многочисленные возможности практического применения в
данной области.
1979 — в МГТУ им. Н. Э. Баумана по заказу КГБ был сделан аппарат для
обезвреживания взрывоопасных предметов — сверхлёгкий мобильный
робот МРК01.
1980 — коммерческое начало для роботов, производимых на основе
высоких технологий. С этого момента рынок начал расти, несмотря на обвал,
произошедший в экономике Японии, и на то, что производство (в основном
потребительская электроника) было перемещено за рубеж, что повлияло на
уменьшение спроса внутри страны в 90х годах. Постепенно японская
экономика восстановилась, и с 2003 года опять наблюдается рост.
В настоящее время на долю Японии приходится около 45%
функционирующих в мире промышленных роботов. Если говорить об
абсолютных цифрах, то к концу 2004 года в Японии было задействовано 356500
промышленных роботов, на втором месте со значительным отрывом шли
Соединенные Штаты Америки (122000 промышленных роботов). Япония также
занимает первое место в мире и по экспорту промышленных роботов. Ежегодно
эта страна производит более 60 тысяч роботов, почти половина из которых идет
на экспорт. Такой разрыв, безусловно, делает нашествие японских роботов ещё
более заметным.
1982 — 18—27 октября 1982 г. в Ленинграде, в выставочном комплексе в
Гавани проходила (вероятно, первая вСССР) Международная выставка
«Промышленные роботы82».
1986 — в Чернобыле впервые в СССР применены роботы для очистки
радиоактивных отходов.
2005 — ВМФ России в Балтийском море проведены испытания
подводного роботаразведчика «Гном».
2007 — МВД России в Перми проводило испытания тестового робота
милиционера РБОТ 001.
2010 — в Америке в продажу поступили новые роботы PR2.
2011 — доставлен на МКС робот НАСА Робонавт2.
2013 — создан и доставлен на МКС первый японский роботастронавт.
1.4.2 Типы роботов
Аптечный робот
Андроид (человекообразный робот)
Биоробот
Промышленный робот
18
Транспортный робот
Подводный робот
Бытовой робот
Боевой робот
Зооробот
Звероробот
Летающий робот
Медицинский робот
Микроробот
Наноробот
Персональный робот
Педикулятор
Роботартист
Робот для аптеки
Роботигрушка
Роботофициант
Роботпрограмма
Роботхирург
Роботэкскурсовод
Социальный робот
Шаробот
1.4.3 Промышленные роботы
Появление станков с числовым программным управлением (ЧПУ) привело
к созданию программируемых манипуляторов для разнообразных операций по
загрузке и разгрузке станков. Появление в 70х гг. микропроцессорных систем
управления и замена специализированных устройств управления на
программируемые контроллеры позволили снизить стоимость роботов в три
раза, сделав рентабельным их массовое внедрение в промышленности. Этому
способствовали объективные предпосылки развития промышленного
производства.
Несмотря на их высокую стоимость, численность промышленных роботов
в странах с развитым производством быстро растёт. Основная причина массовой
роботизации такова: «Роботы выполняют сложные производственные операции
по 24 ч в сутки. Выпускаемая продукция при этом имеет высокое качество.
Они... не болеют, не нуждаются в обеденном перерыве и отдыхе, не бастуют, не
требуют повышения заработной платы и пенсии. Роботы не подвержены влиянию
19температуры окружающей среды либо воздействию газов или выбросов
агрессивных веществ, опасных для жизни человека»
1.4.4 Медицинские роботы
В последние годы роботы получают всё большее применение в медицине; в
частности, разрабатываются различные модели хирургических роботов. Ещё в
1985 году робот Unimation Puma 200 был использован для позиционирования
хирургической иглы при выполнении биопсии головного мозга, проводившейся
под управлением компьютера. В 1992 году разработанный в Имперском
колледже Лондона робот ProBot
впервые осуществил операцию
напредстательной железе, положив начало практической роботизированной
хирургии. С 2000 года компания Intuitive Surgical серийно выпускает робот Da
Vinci, предназначенный для лапароскопических операций и установленный в
нескольких сотнях клиник по всему миру.
1.4.5 Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации
бытовых роботов стала механическая собачка AIBO корпорации Sony.
В сентябре 2005 в свободную продажу впервые поступили первые
человекообразные роботы «Вакамару» производства фирмы Mitsubishi. Робот
стоимостью $15 тыс. способен узнавать лица, понимать некоторые фразы, давать
справки, выполнять некоторые секретарские функции, следить за помещением.
Всё большую популярность набирают роботыуборщики (по своей сути —
автоматические пылесосы), способные самостоятельно прибраться в квартире и
вернуться на место для подзарядки без участия человека.
1.4.6 Боевые роботы
Боевым роботом называют автоматическое устройство, заменяющее
человека в боевых ситуациях или при работе в условиях, несовместимых с
возможностями человека, в военных целях: разведка, боевые действия,
разминирование и т. п. Боевыми роботами являются не только автоматические
устройства с антропоморфным действием, которые частично или полностью
заменяют человека, но и действующие в воздушной и водной среде, не
являющейся средой обитания человека (авиационные беспилотные с
дистанционным управлением, подводные аппараты и надводные корабли). В
настоящее время большинство боевых роботов являются устройствами
20телеприсутствия, и лишь очень немногие модели имеют возможность выполнять
некоторые задачи автономно, без вмешательства оператора.
В Технологическом институте Джорджии под руководством профессора
Хенрика Кристенсена разработаны напоминающие муравьёв инсектоморфные
роботы, способные обследовать здание на предмет наличия там врагов и мин
ловушек (доставляются к зданию «главным роботом» — мобильным роботом на
гусеничном ходу). Получили распространение в войсках и летающие роботы. На
начало 2012 года военными во всём мире использовались около 10 тысяч
наземных и 5 тысяч летающих роботов; 45 стран мира разрабатывало или
закупало военных роботов
1.4.7 Трагические факты
В 1981 году Кэндзи Урада, рабочий завода Kawasaki стал первой
официальной жертвой, погибшей от руки робота. С этого времени число
жертв роботов растёт, несмотря на внедрение усовершенствованных
механизмов безопасности.
18 марта 2008 года 81летний австралиец стал первым человеком,
который покончил жизнь самоубийством при помощи робота, которого сам
собрал согласно схемам, взятым из сети Интернет
II. Исследование
Цель данного опроса в том, чтобы узнать какое количество учащихся
имеет представление о технологиях будущего. В анкетирование учувствовало 50
учащихся. Вопрос данного анкетирования был: Как вы представляете мир в
будущем? По результатам опроса я выяснил, что все учащиеся представляют
жизнь, в которой будут роботы, летающие машины, свободный полет в космос,
обладающий вычислительной мощностью
электромашины,
21
компьютер,человеческого мозга, 3D принтер дома, голографические компьютерные
интерфейсы, нанороботы, электровелосипед.
III.Разработка продукта
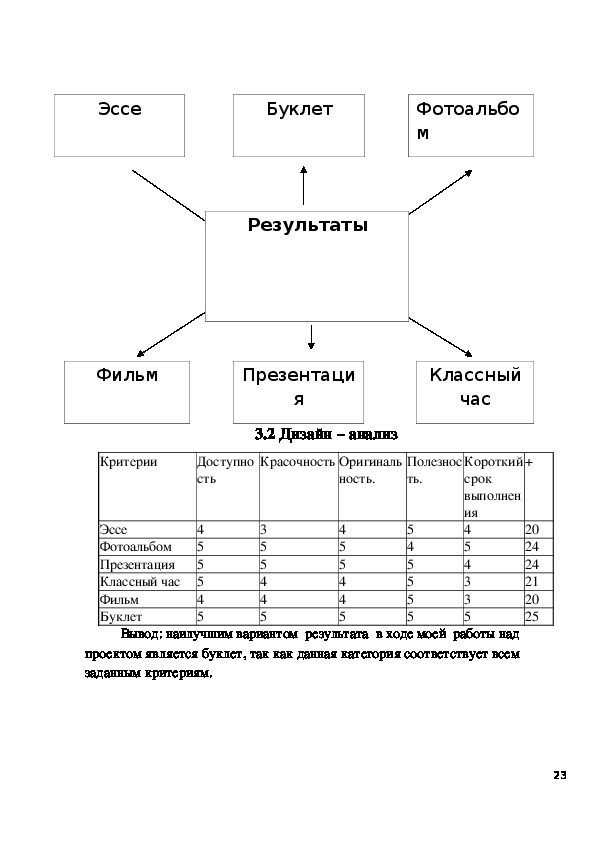
3.1 Первоначальные идеи продукта
22Эссе
Буклет
Фотоальбо
м
Результаты
Фильм
Критерии
Презентаци
я
Классный
час
3.2 Дизайн – анализ
Красочность Оригиналь
ность.
Доступно
сть
Полезнос
ть.
Короткий
срок
выполнен
ия
4
5
4
3
3
5
+
20
24
24
21
20
25
Эссе
Фотоальбом
Презентация
Классный час
Фильм
Буклет
4
5
5
5
4
5
3
5
5
4
4
5
4
5
5
4
4
5
5
4
5
5
5
5
Вывод: наилучшим вариантом результата в ходе моей работы над
проектом является буклет, так как данная категория соответствует всем
заданным критериям.
233.3. Разработка буклета
3.4 Готовый буклет
24Выводы
Роботы – это механические помощники человека, способные
выполнять операции по заложенной в них программе и реагировать
на окружение.
Нанороботы успешно будут справляться с удалением камней в
почках, лечить подагру, чистить раны и выполнять множество
других задач.
25 По приблизительным подсчетам, нынешняя стоимость тестового
образца беспилотного автомобиля от Google составляет 150 тысяч
долларов без налогов и пошлин.
Умный дом — жилой дом современного типа, организованный для
автоматизации
помощи
проживания
при
и высокотехнологичных устройств
людей
В 1981 году Кэндзи Урада, рабочий завода Kawasaki стал первой
официальной жертвой, погибшей от руки робота. С этого времени
число жертв роботов растёт,
несмотря на внедрение
усовершенствованных механизмов безопасности.
Типовая стоимость для разного рода квартир составит: для
двухкомнатной квартиры не менее 3500 евро; для трехкомнатной
квартиры не менее 5000 евро, если же речь идет о двухэтажном
коттедже с участком, то тут цена начинается с 8000 евро.
Разработке компонентов наноустройств и непосредственно
нанороботам посвящен ряд международных научных конференций.
По состоянию на март 2013 года, автомобили Google не могут
передвигаться под проливным дождём и в условиях заснеженной
местности. Связано это с тем, что идентификация местности
производится посредством сравнения заблаговременно отснятых
фотографий с результатами визуализации окружающего ландшафта
сканирующими системами автомобиля
18 марта 2008 года 81летний австралиец стал первым человеком,
который покончил жизнь самоубийством при помощи робота,
которого сам собрал согласно схемам, взятым из сети Интернет
По оценкам аналитиков рынок умного дома активно развивается. К
2020 году общий объем мирового рынка достигнет $51.77 млрд.
Самоанализ
При работе над проектом решены все поставленные цели и задачи.
Данная работа дала возможность выразить себя. Создавая проект, я приобрел
новые знания, в частности изобретениях будущего. В ходе работы над проектом
трудности не возникли. Материал данной работы (буклет) можно использовать
на уроках информатики и физики.
26Список литературы
:// ru . wikipedia
.
1.Беспилотный автомобиль Google [Электронный ресурс]
https
2.Умный дом [Электронный ресурс]
https
3.Нанороботы [Электронный ресурс]
:// ru . wikipedia
.
27:// ru . wikipedia
.
https
4.Роботы [Электронный ресурс]
https
:// ru . wikipedia
.
. ru
:// hi news
5.Как будут работать нанороботы [Электронный ресурс]
http
6.Беспилотные машины [Электронный ресурс]
http
7. Беспилотные автомобили: можно ли доверить вождение роботу?
[Электронный ресурс]
:// www
club
. audi
. ru .
http://autoportal.ua
8. Система умный дом. [Электронный ресурс]
http
:// sigadoma
. ru
9. Роботы в ближайшем будущем. [Электронный ресурс]
http
. infuture
:// www
. ru
Приложение №1
Ж.с.
Р.с
Ученики все знают о технологиях
будущего.
У учеников недостаточно знаний о
технологиях будущего.
28Проблема:
Хочу, чтобы в будущем у всех людей была жизнь наиболее комфортной, но на
данный момент представления людей об этом недостаточны.
Приложение №2
Решение проблемы
Оставить как есть
Проведение
классного часа
Создать
информационную
презентацию
Показать фильм о
технологиях
будущего
Написать эссе
Вывод: Для решения проблемы я остановился на способе создания буклета,
так как ученики полностью будут знать о технологиях будущего.
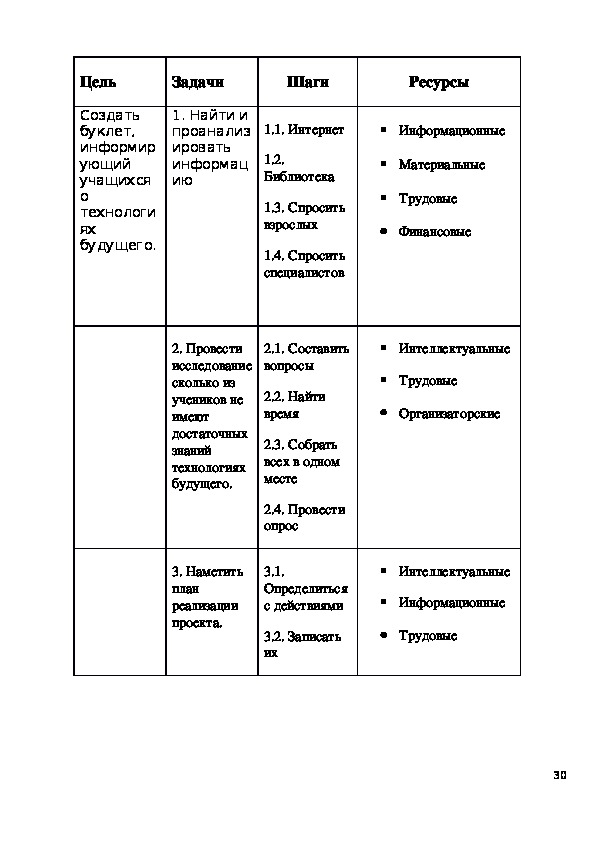
Приложение №3
Планирование деятельности
29Задачи
1. Найти и
проанализ
ировать
информац
ию
Цель
Создать
буклет,
информир
ующий
учащихся
о
технологи
ях
будущего.
2. Провести
исследование
сколько из
учеников не
имеют
достаточных
знаний
технологиях
будущего.
3. Наметить
план
реализации
проекта.
Шаги
Ресурсы
1.1. Интернет
Информационные
1.2.
Библиотека
1.3. Спросить
взрослых
1.4. Спросить
специалистов
2.1. Составить
вопросы
2.2. Найти
время
2.3. Собрать
всех в одном
месте
2.4. Провести
опрос
3.1.
Определиться
с действиями
3.2. Записать
их
Материальные
Трудовые
Финансовые
Интеллектуальные
Трудовые
Организаторские
Интеллектуальные
Информационные
Трудовые
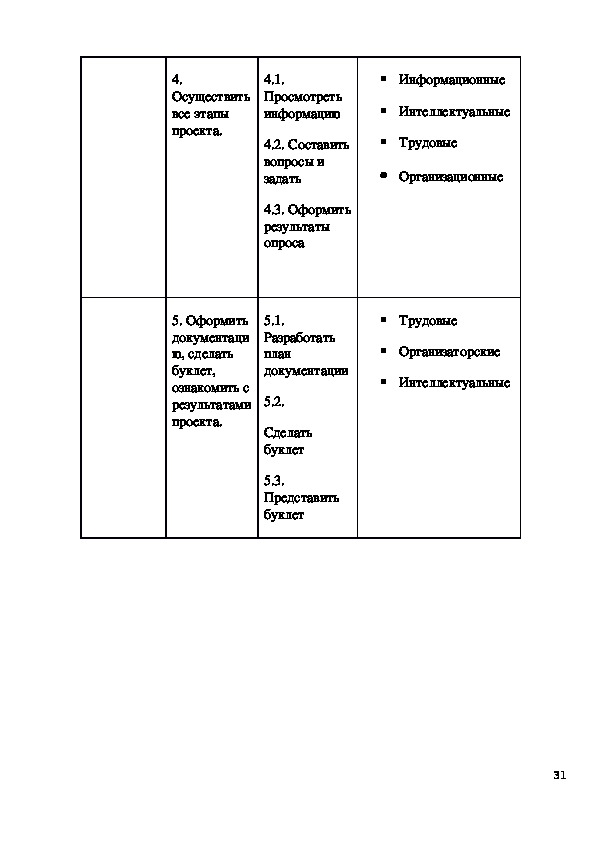
30 Информационные
Интеллектуальные
Трудовые
Организационные
Трудовые
Организаторские
Интеллектуальные
4.
Осуществить
все этапы
проекта.
5. Оформить
документаци
ю, сделать
буклет,
ознакомить с
результатами
проекта.
4.1.
Просмотреть
информацию
4.2. Составить
вопросы и
задать
4.3. Оформить
результаты
опроса
5.1.
Разработать
план
документации
5.2.
Сделать
буклет
5.3.
Представить
буклет
3132