Поделиться

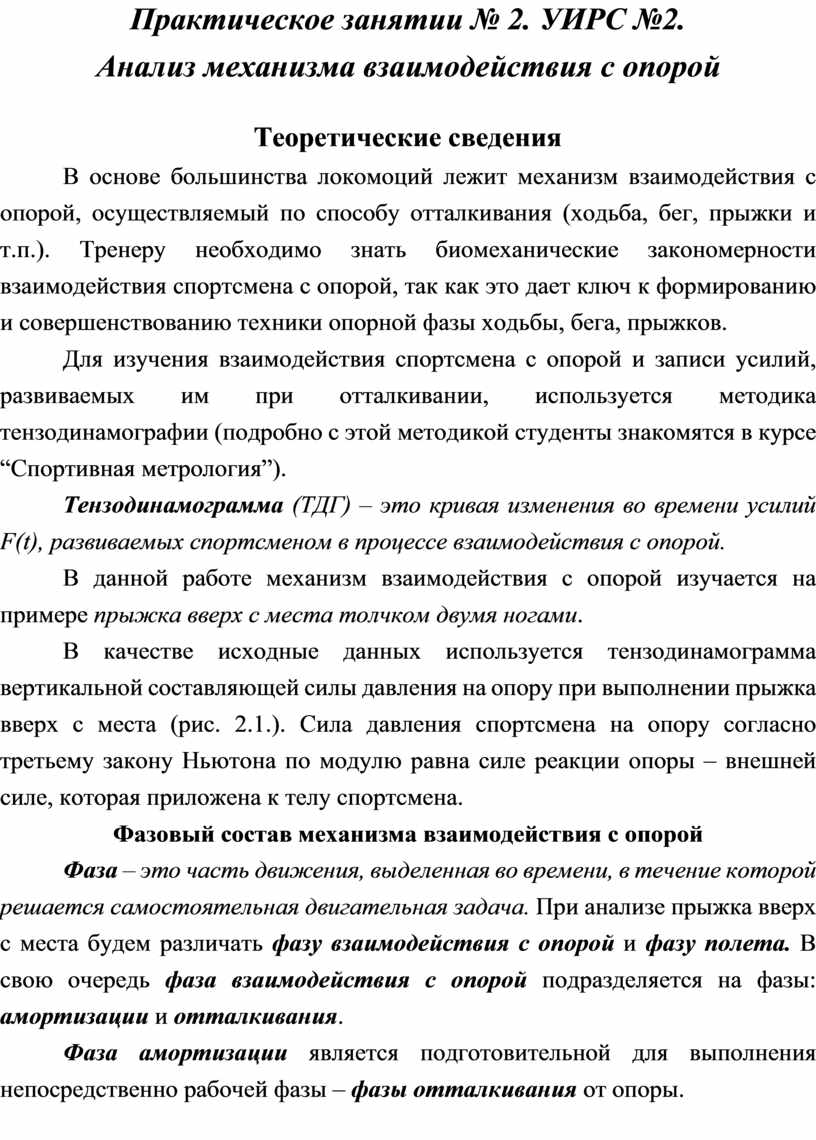
Практическое занятии № 2. УИРС №2.
Анализ механизма взаимодействия с опорой
Теоретические сведения
В основе большинства локомоций лежит механизм взаимодействия с опорой, осуществляемый по способу отталкивания (ходьба, бег, прыжки и т.п.). Тренеру необходимо знать биомеханические закономерности взаимодействия спортсмена с опорой, так как это дает ключ к формированию и совершенствованию техники опорной фазы ходьбы, бега, прыжков.
Для изучения взаимодействия спортсмена с опорой и записи усилий, развиваемых им при отталкивании, используется методика тензодинамографии (подробно с этой методикой студенты знакомятся в курсе “Спортивная метрология”).
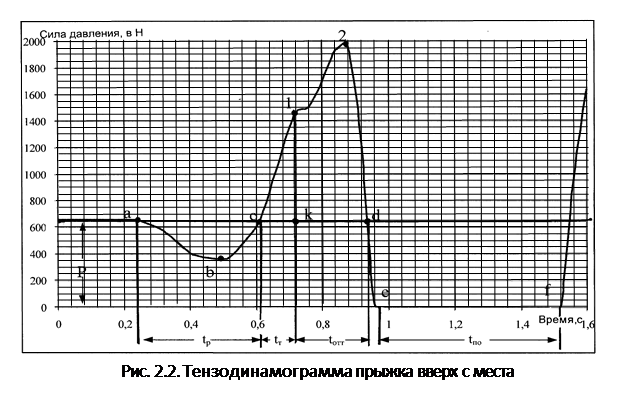
Тензодинамограмма (ТДГ) – это кривая изменения во времени усилий F(t), развиваемых спортсменом в процессе взаимодействия с опорой.
В данной работе механизм взаимодействия с опорой изучается на примере прыжка вверх с места толчком двумя ногами.
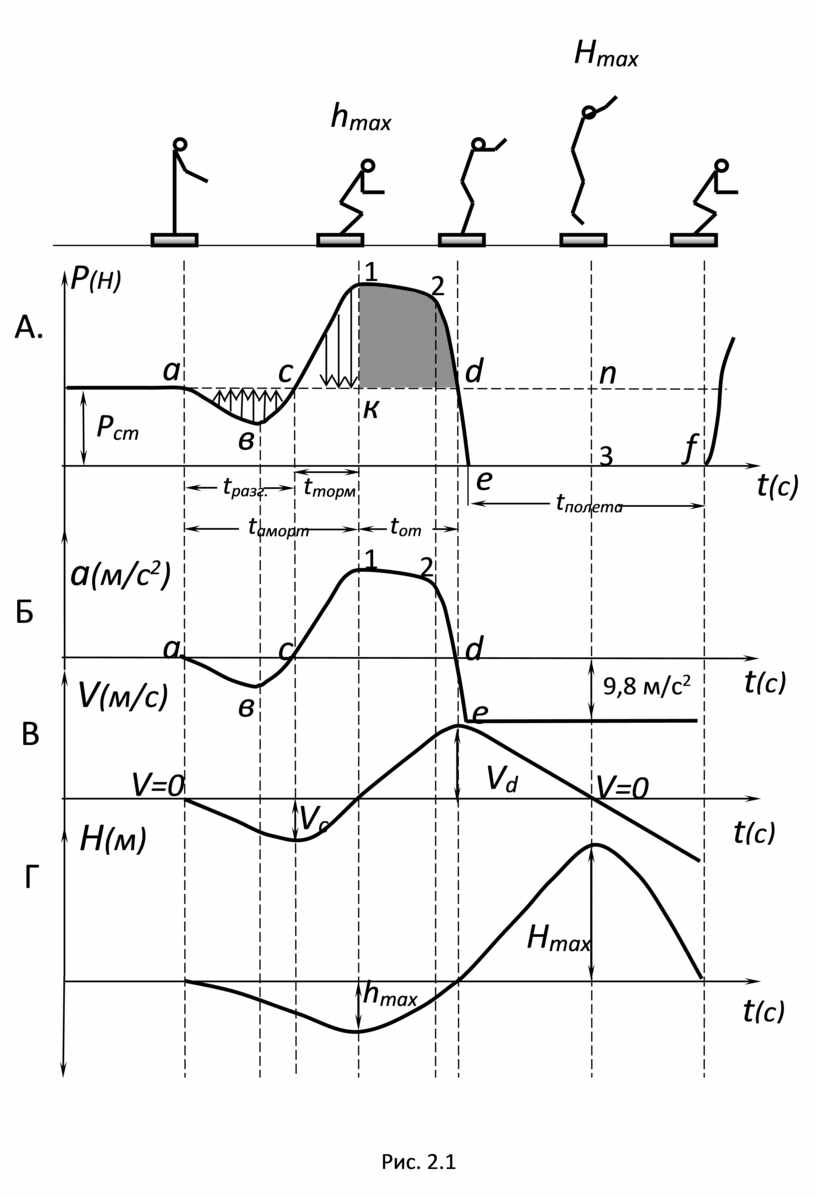
В качестве исходные данных используется тензодинамограмма вертикальной составляющей силы давления на опору при выполнении прыжка вверх с места (рис. 2.1.). Сила давления спортсмена на опору согласно третьему закону Ньютона по модулю равна силе реакции опоры – внешней силе, которая приложена к телу спортсмена.
Фазовый состав механизма взаимодействия с опорой
Фаза – это часть движения, выделенная во времени, в течение которой решается самостоятельная двигательная задача. При анализе прыжка вверх с места будем различать фазу взаимодействия с опорой и фазу полета. В свою очередь фаза взаимодействия с опорой подразделяется на фазы: амортизации и отталкивания.
Фаза амортизации является подготовительной для выполнения непосредственно рабочей фазы – фазы отталкивания от опоры.
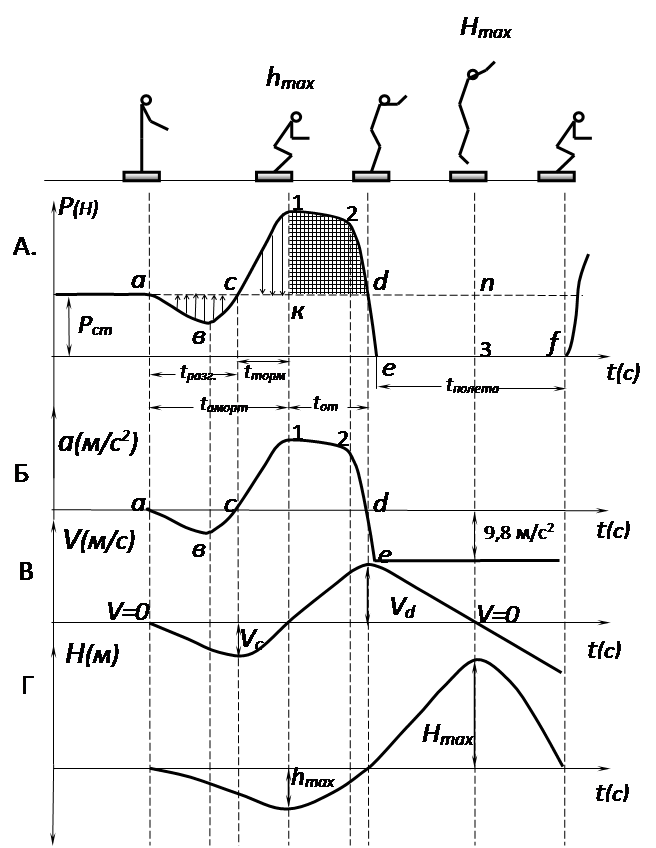
Рис. 2.1
Поэтому двигательные действия в фазе амортизации должны обеспечить оптимальные условия для выполнения фазы отталкивания.
В фазе амортизации происходит сгибание ног в тазобедренных, коленных и голеностопных суставах. При этом сильные, мощные мышцы (ягодичные, четырехглавые, камбаловидные) растягиваются (уступающий режим работы), в них накапливается энергия упругой деформации, которая должна быть реализована для создания мышечной тяги непосредственно в фазу отталкивания (преодолевающий режим работы мышц). В преодолевающем режиме (фаза отталкивания) мышцы проявляют наибольшую тягу, если их предварительное растяжение было достаточно быстрым и переход от фазы амортизации к фазе отталкивания происходил быстро без релаксации мышц и потери энергии в них.
Начало фазы амортизации – точка а на ТДГ; конец – точка 1(рис. 2.1.А). Фаза амортизации состоит из двух фаз: фазы «разгона» ОЦТ и фазы «торможения» ОЦТ.
Начало фазы “разгона”
– точка а на ТДГ, конец – точка с.В
фазе разгона скорость ОЦТ возрастает (по модулю) от ![]() до
до ![]() . Направлен вектор скорости ОЦТ
вертикально вниз. Вектор ускорения ОЦТ в фазе разгона совпадает по направлению
с вектором скорости.
. Направлен вектор скорости ОЦТ
вертикально вниз. Вектор ускорения ОЦТ в фазе разгона совпадает по направлению
с вектором скорости.
Начало фазы торможения
– точка с на ТДГ, конец – точка 1(рис.
2.1.А). В фазе торможения вектор скорости ОЦТ не меняет направления
(направлен вертикально вниз), но уменьшается по модулю от![]() до
до![]() .Это связано с тем, что
спортсмену необходимо остановить движение ОЦТ вниз и перейти к фазе
отталкивания. В фазе торможения вектор ускорения ОЦТ направлен в сторону,
противоположную вектору скорости, т.е. вертикально вверх.
.Это связано с тем, что
спортсмену необходимо остановить движение ОЦТ вниз и перейти к фазе
отталкивания. В фазе торможения вектор ускорения ОЦТ направлен в сторону,
противоположную вектору скорости, т.е. вертикально вверх.
Фаза отталкивания
– основная фаза движения. Этой фазе соответствует участок ТДГ от точки 1
до точки d.Вектор
скорости ОЦТ в этой фазе меняет направление (направлен вертикально вверх), и по
модулю возрастает от нуля![]() (точка
1на
ТДГ) до Vd
(точка d
на ТДГ).Разгон ОЦТ в фазе отталкивания происходит от точки 1
до точки d, в которой сила давления
на опору становится меньше Рст.
(рис. 2.1.А).
(точка
1на
ТДГ) до Vd
(точка d
на ТДГ).Разгон ОЦТ в фазе отталкивания происходит от точки 1
до точки d, в которой сила давления
на опору становится меньше Рст.
(рис. 2.1.А).
Начало фазы полета соответствует точке е на ТДГ, конец – точке f. В середине фазы полета ОЦТ достигает максимальной высоты Hmax. В этот момент вектор скорости ОЦТ меняет направление и по модулю равен нулю.
Характеристика внешних и внутренних сил при взаимодействии спортсмена с опорой
Для изменения движения ОЦТ тела к нему должна быть приложена внешняя неуравновешенная сила (согласно теореме о движении ОЦТ). Такой внешней силой для ОЦТ тела будет реакция опоры, а точнее ее динамическая составляющая Rдин. Реакция опоры – это пассивная (реактивная) сила. Сама по себе она не может вызвать движение ОЦТ. Но если нет опоры, не от чего оттолкнуться, нет и реакции опоры. Следует помнить, что реакция опоры – это внешняя сила, обеспечивающая движение ОЦТ, но источник энергии движения нашей биомеханической системы – внутренний, это биоэнергия мышечного сокращения.
В покое силу тяжести тела, которая передается на опору в виде веса Рст, уравновешивает статическая реакция опоры Rст (рис. 2.1.А). Силы Рсти Rст равны по величине, противоположны по направлению и приложены к разным телам (Рст – к опоре, Rст– к телу спортсмена).
В процессе взаимодействия с опорой спортсмен оказывает на опору динамическое давление Рдин. Характер изменения динамического давления на опору отражает тензодинамограмма (рис. 2.1.А).
Рассмотрим, как организуется динамическое давление на опору Рдина, следовательно, и равная ему по величине динамическая реакция опоры Rдин., т.е. та внешняя сила, которая изменяет движение ОЦТ тела человека. Движение ОЦТ рассматривается в неподвижной системе отсчета.
В рамках кинетостатики с началом движения подвижных звеньев с ускорением возникают силы инерции Fин этих звеньев, по модулю равные произведению массы движущихся звеньев на ускорение их центров масс (ЦМ): Fин = – ma.
Сила инерции, как мера противодействия начавшемуся движению, всегда направлена против ускорения ЦМ звена и приложена к связи, т.е. к опорному звену, которое как бы “тянет” за собой первое звено.
Внутри нашего тела разыгрывается целое силовое поле частных сил инерции отдельных звеньев. А равнодействующая частных сил инерции приложена к опоре, как к связи, и по модулю равна произведению массы тела на ускорение его ОЦТ. На рис. 2.1.А силы инерции подвижных звеньев и их направления показаны штриховкой.
В фазе “разгона” вектор ускорения ОЦТ направлен вертикально вниз, а значит вектор сил инерции тела спортсмена приложен к опоре и направлен вверх. Динамическое давление на опору уменьшается на величину сил инерции (участок ТДГ от точкиадо точки с) и по модулю равно разности:
![]()
В фазе торможения вектор ускорения ОЦТ меняет направление (вертикально вверх). Вектор сил инерции тоже меняет направление (вниз), а значит, динамическое давление на опору увеличивается на величину сил инерции (участок ТДГ от точки с до точки 1) и по модулю равно сумме:
![]()
В соответствии с изменением динамического давления Рдин, изменяется и равная ему по величине, противоположно направленная и приложенная к телу спортсмена динамическая реакция опоры Rдин, т.е. та внешняя сила, которая обеспечивает движение ОЦТ спортсмена в результате позвенной передачи импульса тела (количества движения) от опоры к ОЦТ тела.
Один из критериев рациональной техники – умение использовать реактивные силы. Применительно к анализу механизма отталкивания – уметь использовать реактивные силы означает начать отталкивание в тот момент, когда реакция опоры наибольшая, т.е. в тот момент, когда опора “выталкивает” спортсмена с наибольшей силой (точка 1 на ТДГ).
Импульс силы отталкивания
В фазе отталкивания мышцы, предварительно растянутые при амортизации, работают в преодолевающем режиме, разгоняют ОЦТ тела вверх. Активность этих мышц при отталкивании определяет величину и характер изменения динамической составляющей реакции опоры Rдин (участок ТДГ от точки 1 до точки d). Результат отталкивания (максимальный разгон ОЦТ) определяется не только величиной Rдин, но и временем ее действия ∆t, т.е. величиной импульса силы.
Импульс силы – это мера действия силы на тело за данный промежуток времени.
УсилиеF(t), развиваемое спортсменом при взаимодействии с опорой, является величиной переменной, изменяемой во времени, поэтому импульс силы отталкивания – это определенный интеграл:
 ,
,
где: S– импульс силы;
F(t) – сила отталкивания (участок ТДГ от точки 1 до точки d);
t1 – момент начала отталкивания (точка 1 на ТДГ);
td – момент окончания отталкивания (точка d на ТДГ).
Импульс силы отталкивания S, как определенный интеграл, вычисляется графически по ТДГ. Численно импульс силы равен площади, образованной кривой изменения силы и осью времени, т.е. площади 1-2-d-к (рис. 2.1.). Величина импульса силы отталкивания не зависит от формы кривой силы отталкивания, а определяется только площадью под кривой.
В результате взаимодействия с опорой (создания на опоре импульса силы) ОЦТ спортсмена приобретает импульс тела(количество движения)mVd, где: m – масса спортсмена; Vd – скорость ОЦТ, достигаемая в результате отталкивания в точке d.
Согласно теореме динамики, импульс тела, приобретаемый ОЦТ спортсмена в результате взаимодействия с опорой, численно равен импульсу силы отталкивания:
 *
*
*Примечание. Справедливо при условии, что скорость ОЦТ в начале отталкивания равна нулю V1=0.
Иными словами, значение скорости Vd, достигаемой ОЦТ в результате отталкивания, определяется величиной импульса силы отталкивания, т.е. величиной площади трапеции 1-2-d-к (рис. 2.1.А).
Основной двигательной задачей при выполнении прыжка вверх является достижение наибольшей высоты H подъема ОЦТ в полетной фазе. Высота подъема ОЦТ связана с величиной вертикальной составляющей скорости ОЦТ следующим соотношением:
 .
.
Учитывая, что величина Vd определяется величиной импульса силы отталкивания, можно заключить, что эффективность решения двигательной задачи и программа движения ОЦТ в полетной фазе H = H(t) закладывается в процессе взаимодействия с опорой по следующей цепочке: чем больше импульс силы отталкивания, тем больше приобретаемый ОЦТ импульс телаm Vd, тем больше скорость ОЦТ Vd и тем выше прыжок.
Задача же создания
необходимого импульса силы отталкивания, с точки зрения биомеханики движения,
состоит в выборе оптимального соотношения между величиной силы и временем
отталкивания в процессе взаимодействия с опорой  и
должна решаться индивидуально для каждого спортсмена с учетом свойств его
биомеханической системы (например, соотношения быстрых и медленных волокон в
мышце), уровнем развития скоростно-силовых качеств, спортивной специализацией.
и
должна решаться индивидуально для каждого спортсмена с учетом свойств его
биомеханической системы (например, соотношения быстрых и медленных волокон в
мышце), уровнем развития скоростно-силовых качеств, спортивной специализацией.
Выбор оптимального соотношения между силой и временем отталкивания с учетом двигательных возможностей спортсмена является центральным элементом в структуре механизма отталкивания и имеет огромное педагогическое значение, являясь одним из решающих условий постановки рациональной техники отталкивания. Короткое, динамичное, взрывное отталкивание и медленный "жимовой" толчок различаются величиной потери энергии. За время короткого взрывного отталкивания в жестко организованной системе подвижных звеньев меньше диссипативных потерь.
Тензодинамографическая методика позволяет решить основную задачу динамики – по заданным силам, развиваемым спортсменом при отталкивании (зарегистрированным на ТДГ), определить кинематические характеристики ОЦТ в опорной и полетной фазах прыжка, а именно:
1) ускорение ОЦТ a = a(t);
2) скорость ОЦТ V=V(t);
3) перемещение ОЦТ (закон движения) H = H(t).
Решение этой задачи имеет чрезвычайно важное значение в спортивной педагогике, т.к. позволяет оценить технику выполнения движения, степень реализации двигательных возможностей спортсмена, находить оптимальные варианты техники для конкретного исполнителя и моделировать двигательные действия.
Исследование закономерностей взаимосвязи таких кинематических характеристик ОЦТ, как a = a(t), V=V(t), H = H(t) позволяет изучить кинематическую структуру отталкивания, что является важным инструментом анализа и корректировки техники взаимодействия с опорой.
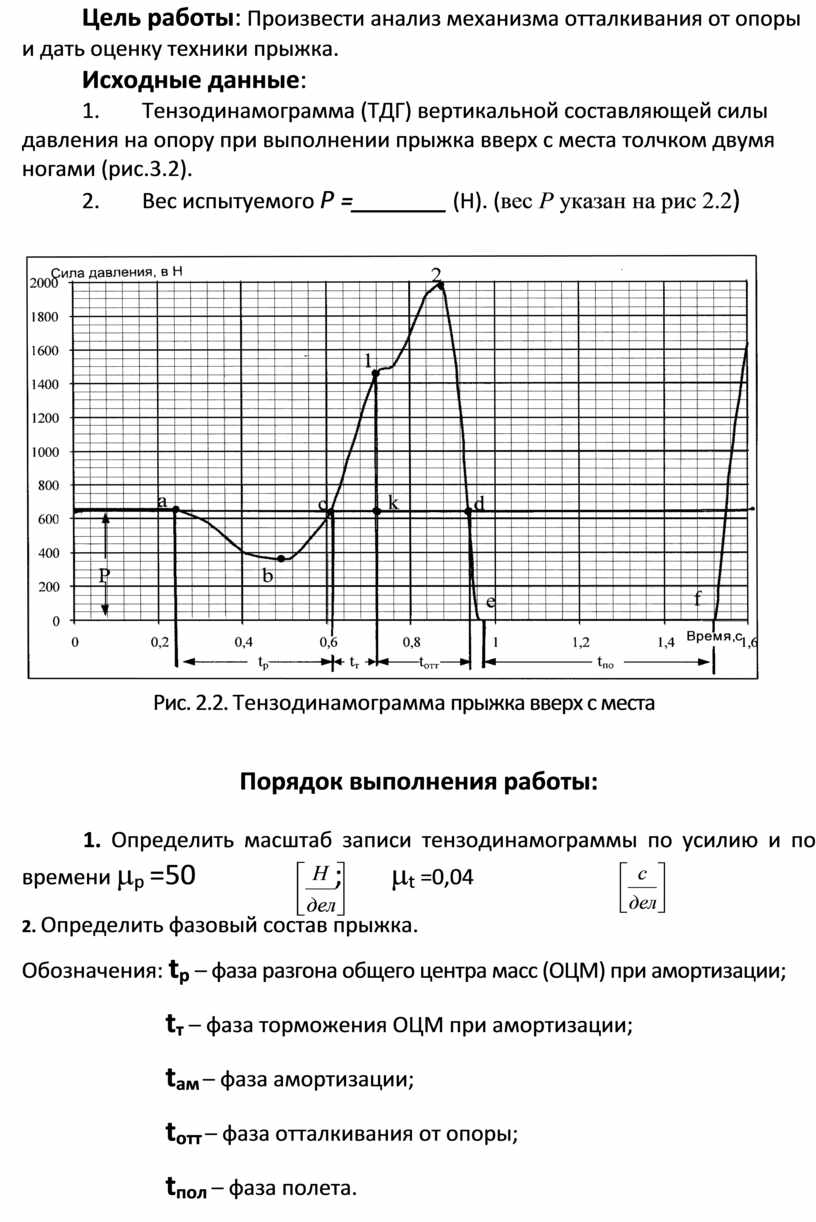
Цель работы: Произвести анализ механизма отталкивания от опоры и дать оценку техники прыжка.
Исходные данные:
1. Тензодинамограмма (ТДГ) вертикальной составляющей силы давления на опору при выполнении прыжка вверх с места толчком двумя ногами (рис.3.2).
2.
 Вес испытуемого Р =________
(Н). (вес
Р указан на рис 2.2)
Вес испытуемого Р =________
(Н). (вес
Р указан на рис 2.2)
Порядок выполнения работы:
![]()
![]() 1. Определить
масштаб записи тензодинамограммы по усилию и по времени mр =50 ; mt =0,04
1. Определить
масштаб записи тензодинамограммы по усилию и по времени mр =50 ; mt =0,04
2. Определить фазовый состав прыжка.
Обозначения: tр – фаза разгона общего центра масс (ОЦМ) при амортизации;
tт – фаза торможения ОЦМ при амортизации;
tам – фаза амортизации;
tотт – фаза отталкивания от опоры;
tпол – фаза полета.
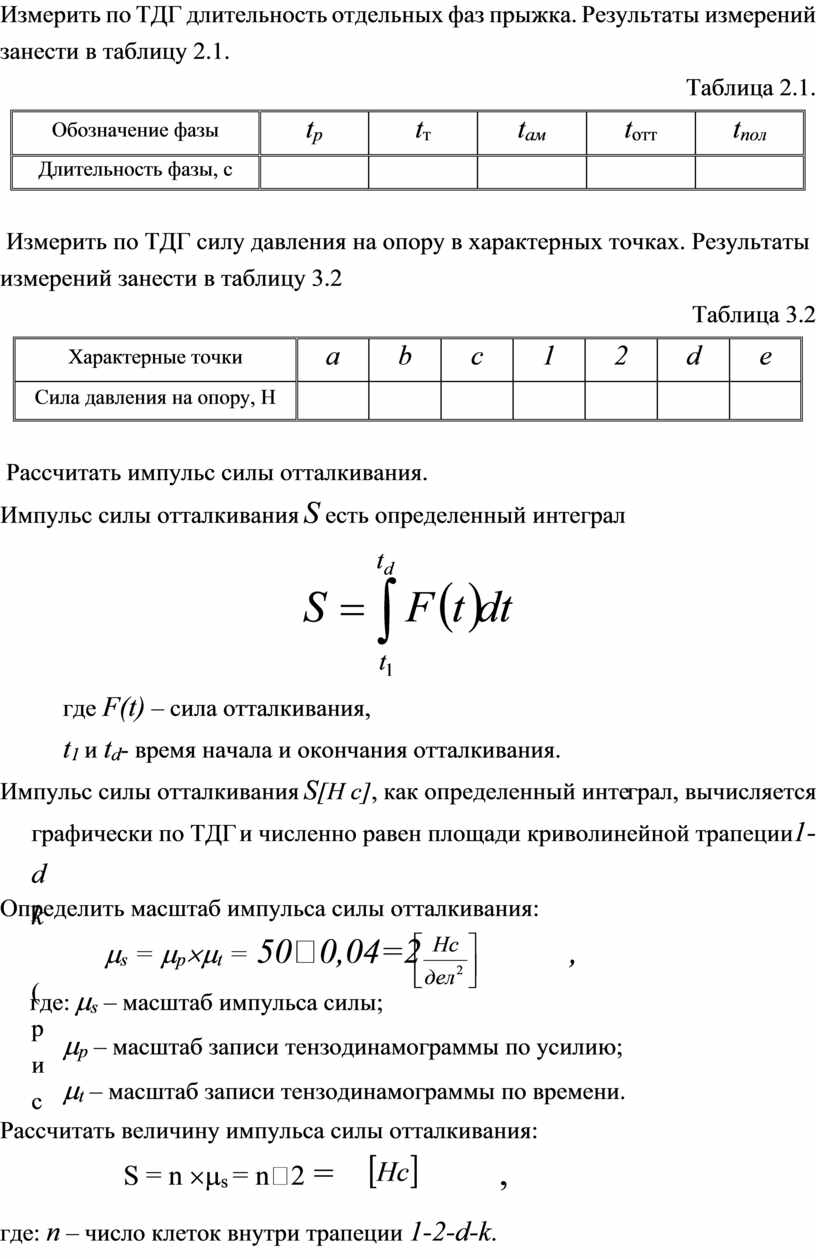
Измерить по ТДГ длительность отдельных фаз прыжка. Результаты измерений занести в таблицу 2.1.
Таблица 2.1.
|
Обозначение фазы |
tр |
tт |
tам |
tотт |
tпол |
|
Длительность фазы, с |
|
|
|
|
|
3. Измерить по ТДГ силу давления на опору в характерных точках. Результаты измерений занести в таблицу 3.2
Таблица 3.2
|
Характерные точки |
а |
b |
с |
1 |
2 |
d |
e |
|
Сила давления на опору, Н |
|
|
|
|
|
|
|
4. Рассчитать импульс силы отталкивания.
![]() Импульс
силы отталкивания S
есть определенный интеграл
Импульс
силы отталкивания S
есть определенный интеграл
где F(t) – сила отталкивания,
t1 и td- время начала и окончания отталкивания.
Импульс силы отталкивания S[Н с], как определенный интеграл, вычисляется графически по ТДГ и численно равен площади криволинейной трапеции 1-2-d-k (рис.2.2).
 Определить
масштаб импульса силы отталкивания:
Определить
масштаб импульса силы отталкивания:
ms = mр´mt = 50‧0,04=2 ,
где: ms – масштаб импульса силы;
mр – масштаб записи тензодинамограммы по усилию;
mt – масштаб записи тензодинамограммы по времени.
Рассчитать величину импульса силы отталкивания:
![]() S = n ´ms
=
n‧2 =
,
S = n ´ms
=
n‧2 =
,
где: n – число клеток внутри трапеции 1-2-d-k.
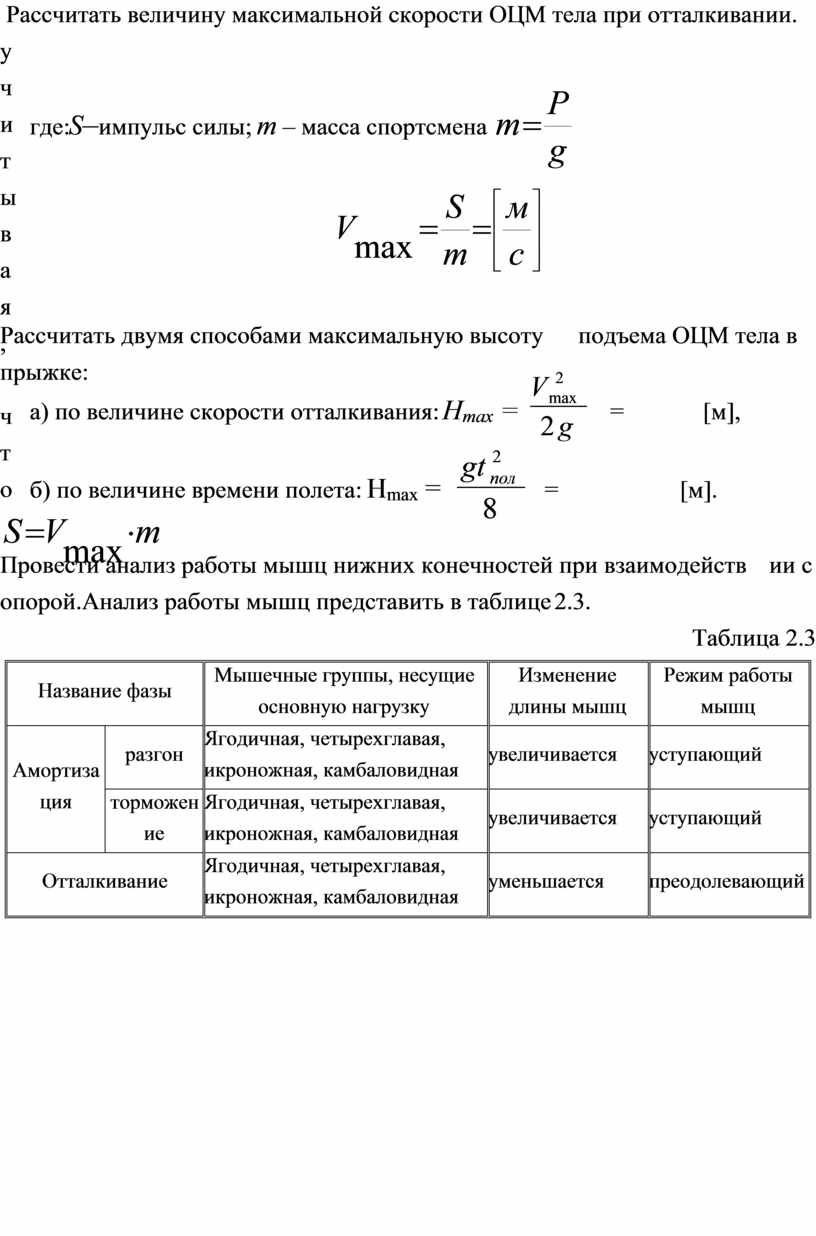
5.
Рассчитать величину максимальной скорости ОЦМ тела при отталкивании. Vmax,
учитывая,
что ![]() ,
,
где:S–импульс
силы; m – масса спортсмена 
 6. Рассчитать
двумя способами максимальную высоту подъема ОЦМ тела в прыжке:
6. Рассчитать
двумя способами максимальную высоту подъема ОЦМ тела в прыжке:
а) по величине скорости отталкивания: Hmax = = [м],

б) по величине времени полета: Hmax = = [м].
7.Провести анализ работы мышц нижних конечностей при взаимодействии с опорой.Анализ работы мышц представить в таблице 2.3.
Таблица 2.3
|
Название фазы |
Мышечные группы, несущие основную нагрузку |
Изменение длины мышц |
Режим работы мышц |
|
|
Амортизация |
разгон |
Ягодичная, четырехглавая, икроножная, камбаловидная |
увеличивается |
уступающий |
|
торможение |
Ягодичная, четырехглавая, икроножная, камбаловидная |
увеличивается |
уступающий |
|
|
Отталкивание |
Ягодичная, четырехглавая, икроножная, камбаловидная |
уменьшается |
преодолевающий |
|
ВЫВОДЫ.
В выводах следует отразить:
1. Закономерность взаимосвязи высоты прыжка и импульса силы отталкивания.
2. Учитывая, что величина импульса силы отталкивания равна площади S1-2-d-k под кривой отталкивания, как надо изменить технику отталкивания, чтобы увеличить импульс силы. Варианты ответа:
· Резче переходить от амортизации к отталкиванию, чтобы исключить явление релаксации мышц.
· Несколько увеличить время активной фазы отталкивания (промежуток времени от точки 1 до точки 2)
· Для уменьшения диссипативных потерь жестко организовать систему подвижных звеньев нижних конечностей.
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.