Поделиться

Методическая разработка
по ОП.03 Электротехника и электроника
на тему
«Частотно-регулируемый привод (система ПЧ-АД)»
2021
Цель занятия:
1. Изучить тему Частотно-регулируемый привод (система ПЧ-АД)
Время: 2 часа
Место: кабинет Электротехники и электроники
Учебно - материальное обеспечение:
Плакаты, презентации, лабораторное оборудование.
Распределение времени занятия:
Вступительная часть 5 мин;
Проверка подготовки обучающихся к занятию 5 мин;
Учебные вопросы занятия 25 мин;
Домашнее задание 5 мин;
Заключение 5 мин.
Содержание занятия
Вступительная часть
– принять рапорт дежурного по группе;
– проверить наличие студентов и их готовность к занятию;
– ответить на вопросы, которые возникли при подготовке к занятию на самостоятельной работе;
– провести опрос по ранее изученному материалу:
– Опрос рекомендуется провести устно, задавая вопросы и вызывая одного-двух студентов для ответа,
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД
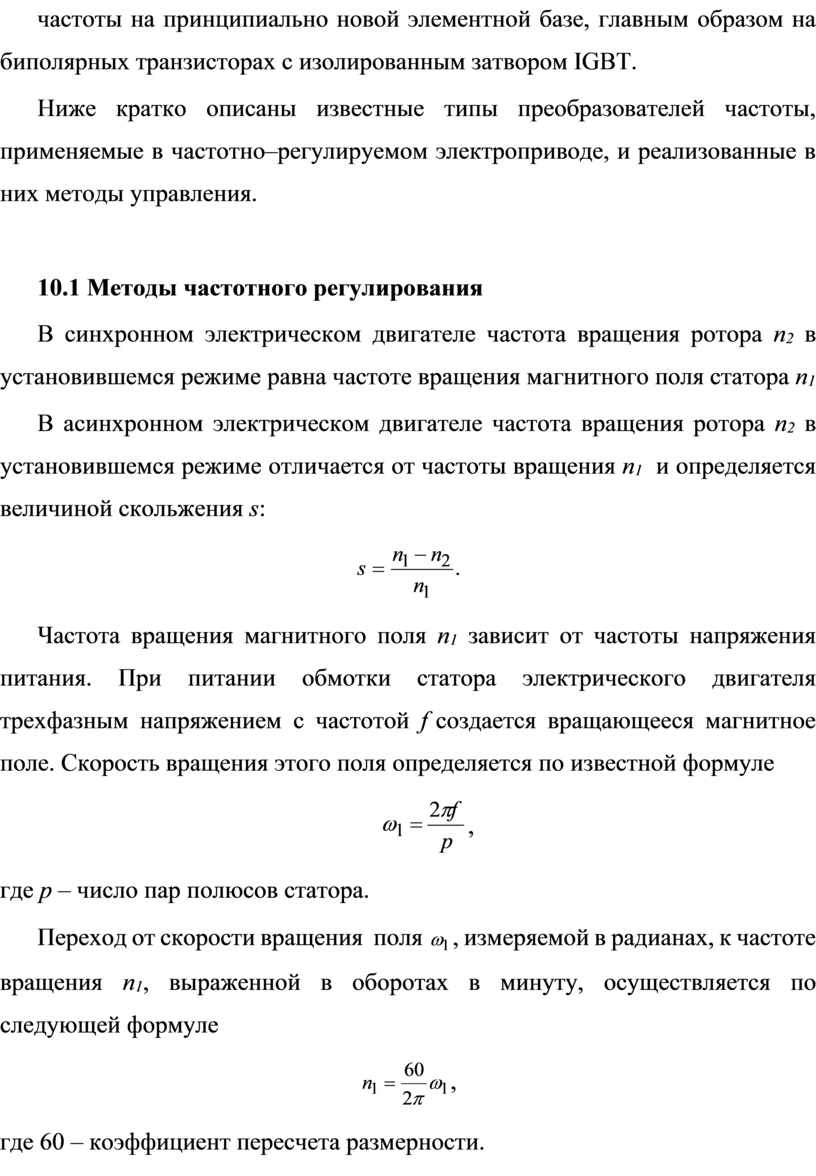
Современный частотно-регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (рис.10.1).
Электрический двигатель преобразует электрическую энергию в механическую и приводит в движение исполнительный орган технологического механизма.
![]()
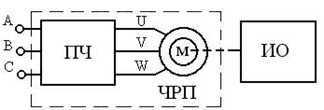
Рис. 10.1. Структурная схема частотно-регулируемого электропривода (ЧРП):
ПЧ – преобразователь частоты; РО – рабочий орган (насос, станок, генератор); ЧРП
Преобразователь частоты (ПЧ) управляет электрическим двигателем и представляет собой электронное статическое устройство. На выходе преобразователя формируется электрическое напряжение с переменными амплитудой и частотой.
Название «частотно–регулируемый электропривод» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя частоты.
На протяжении последних 10–15 лет в мире наблюдается широкое и успешное внедрение частотно регулируемого электропривода для решения различных технологических задач во многие отрасли промышленности. Это объясняется в первую очередь разработкой и созданием преобразователей частоты на принципиально новой элементной базе, главным образом на биполярных транзисторах с изолированным затвором IGBT.
Ниже кратко описаны известные типы преобразователей частоты, применяемые в частотно–регулируемом электроприводе, и реализованные в них методы управления.
10.1 Методы частотного регулирования
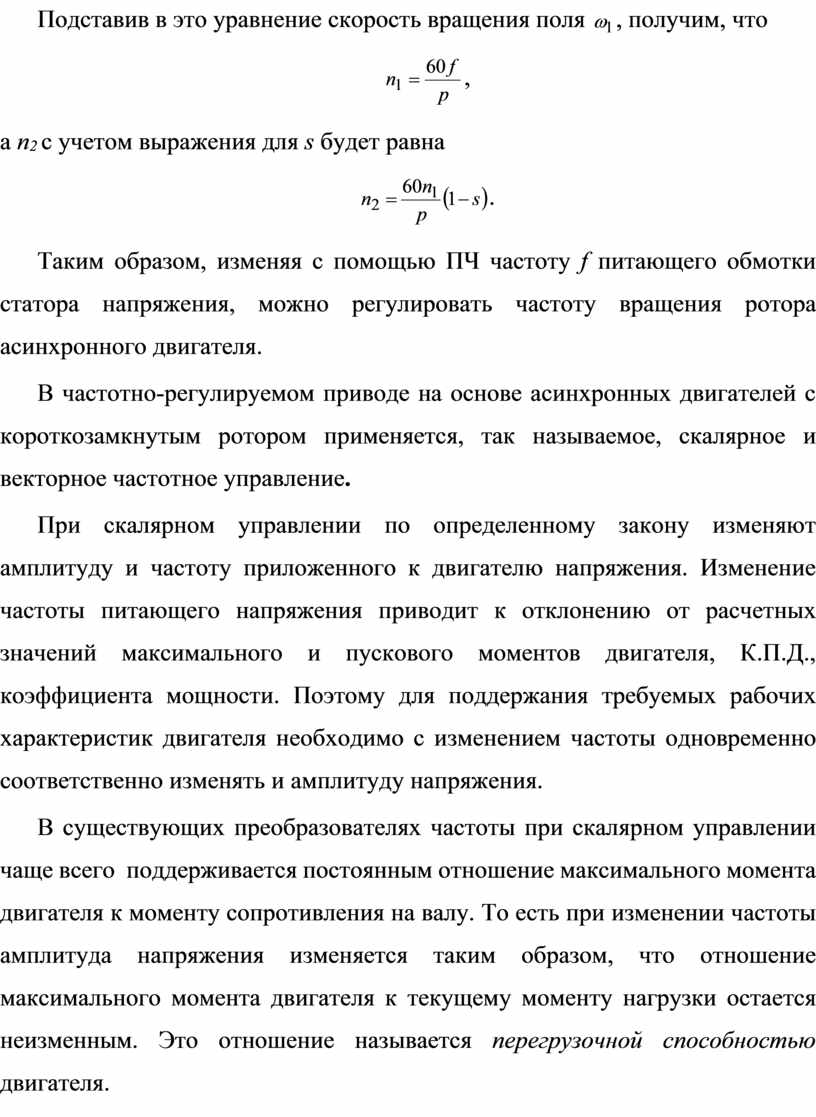
В синхронном электрическом двигателе частота вращения ротора п2 в установившемся режиме равна частоте вращения магнитного поля статора п1
В асинхронном электрическом двигателе частота вращения ротора п2 в установившемся режиме отличается от частоты вращения п1 и определяется величиной скольжения s:

Частота вращения магнитного поля п1 зависит от частоты напряжения питания. При питании обмотки статора электрического двигателя трехфазным напряжением с частотой f создается вращающееся магнитное поле. Скорость вращения этого поля определяется по известной формуле
 ,
,
где p – число пар полюсов статора.
Переход
от скорости вращения поля ![]() , измеряемой в радианах, к частоте
вращения п1, выраженной в оборотах в минуту, осуществляется
по следующей формуле
, измеряемой в радианах, к частоте
вращения п1, выраженной в оборотах в минуту, осуществляется
по следующей формуле
![]() ,
,
где 60 – коэффициент пересчета размерности.
Подставив
в это уравнение скорость вращения поля ![]() ,
получим, что
,
получим, что
![]() ,
,
а n2 с учетом выражения для s будет равна
![]() .
.
Таким образом, изменяя с помощью ПЧ частоту f питающего обмотки статора напряжения, можно регулировать частоту вращения ротора асинхронного двигателя.
В частотно-регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяется, так называемое, скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, К.П.Д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочной способностью двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и К.П.Д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
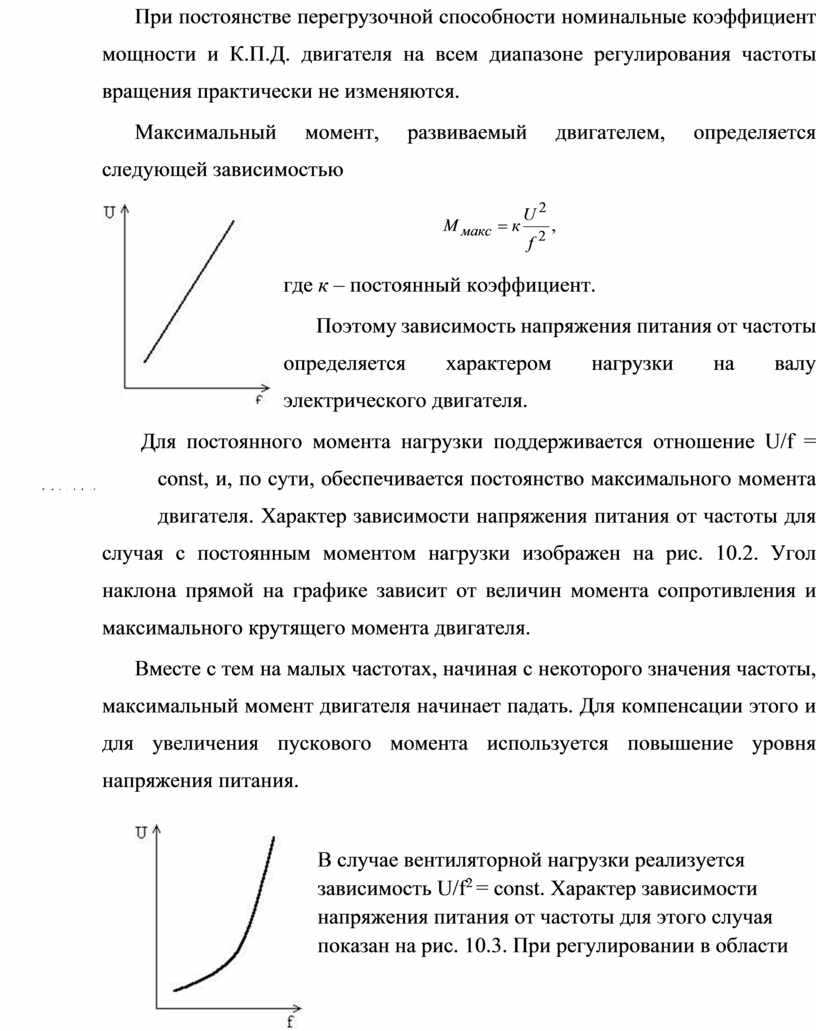
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
где к – постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
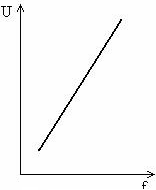
![]() Для постоянного момента нагрузки поддерживается
отношение U/f
= const, и, по сути, обеспечивается
постоянство максимального момента двигателя. Характер зависимости напряжения
питания от частоты для случая с постоянным моментом нагрузки изображен на рис.
10.2. Угол наклона прямой на графике зависит от величин момента сопротивления и
максимального крутящего момента двигателя.
Для постоянного момента нагрузки поддерживается
отношение U/f
= const, и, по сути, обеспечивается
постоянство максимального момента двигателя. Характер зависимости напряжения
питания от частоты для случая с постоянным моментом нагрузки изображен на рис.
10.2. Угол наклона прямой на графике зависит от величин момента сопротивления и
максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
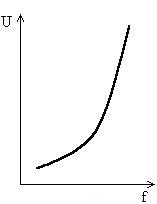
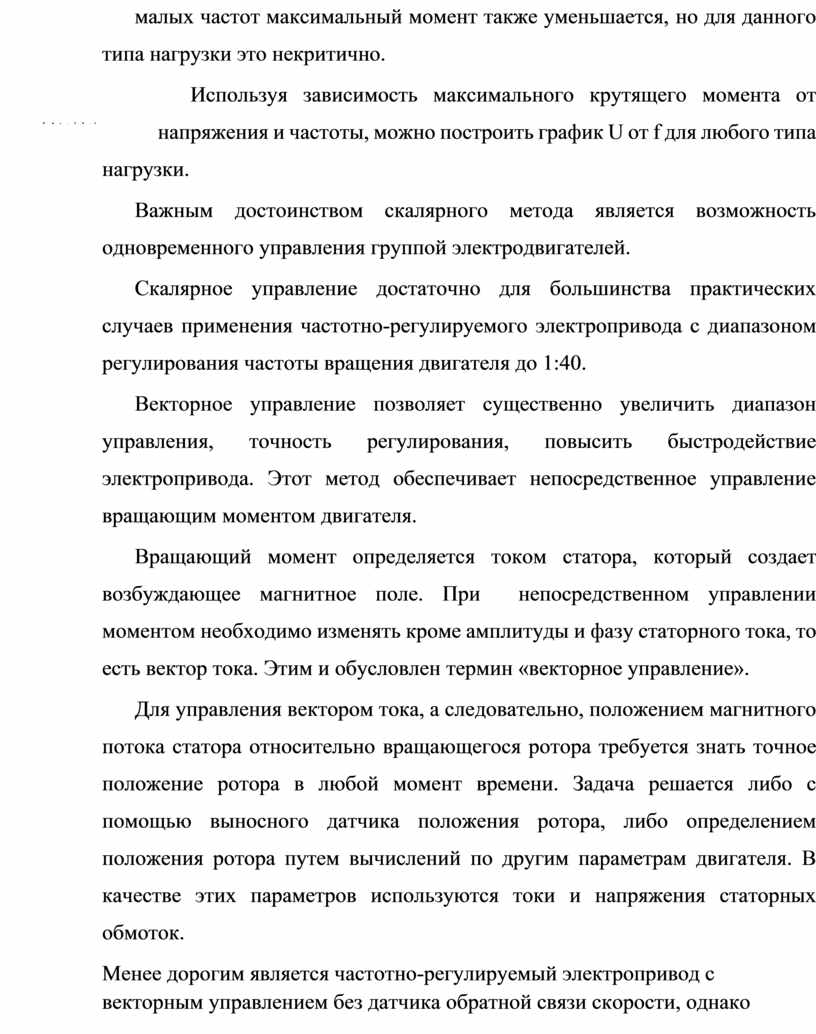
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис. 10.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
![]() Используя зависимость максимального крутящего момента
от напряжения и частоты, можно построить график U
от f для любого типа нагрузки.
Используя зависимость максимального крутящего момента
от напряжения и частоты, можно построить график U
от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно-регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно-регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно-регулируемого электропривода без обратной связи по скорости невозможна.
10.2 Краткие сведения о преобразователях частоты
Преобразователь частоты – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Преобразователи частоты, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
1. Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока.
2. Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока).
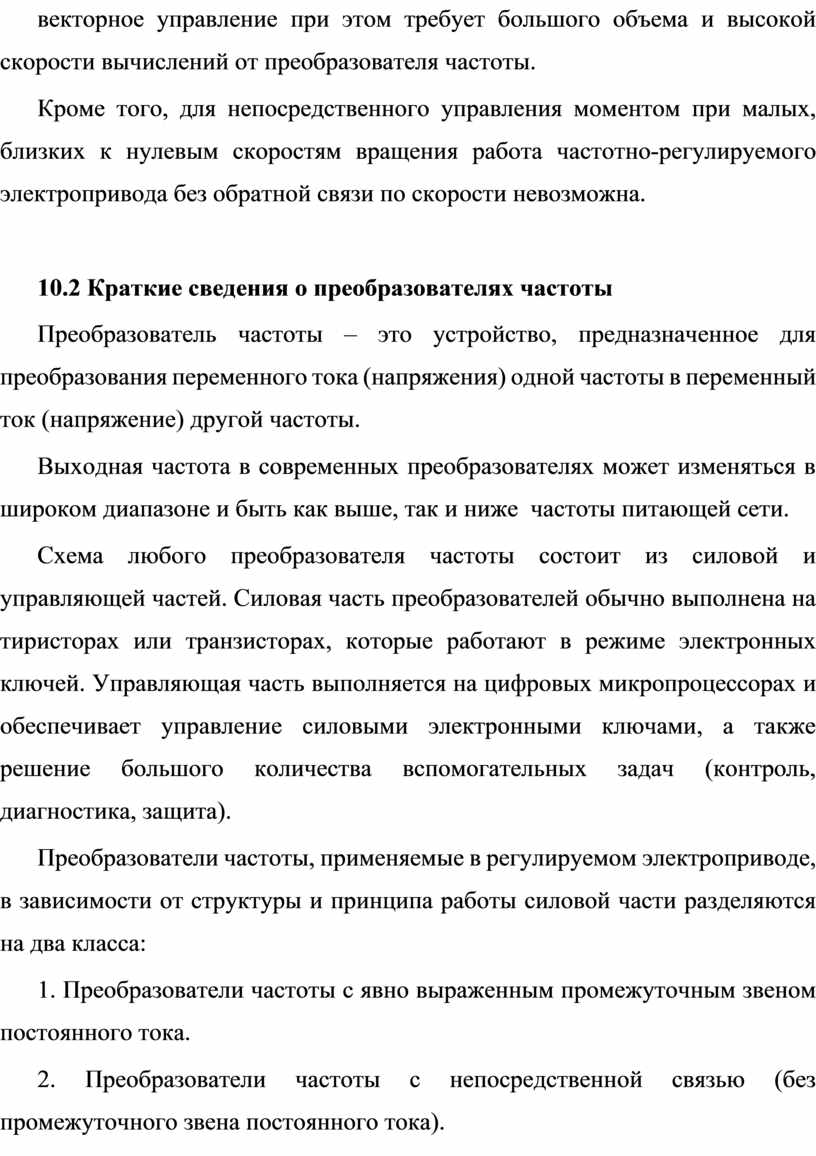
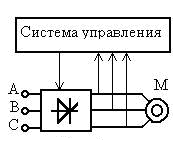 Рис.
10.4
Рис.
10.4
 Каждый
из существующих классов преобразователей имеет свои достоинства и недостатки,
которые определяют область рационального применения каждого из них.
Каждый
из существующих классов преобразователей имеет свои достоинства и недостатки,
которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 10.4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на незапираемых тиристорах. Система управления поочередно отпирает группы тиристоров и подключает статорные обмотки двигателя к питающей сети.
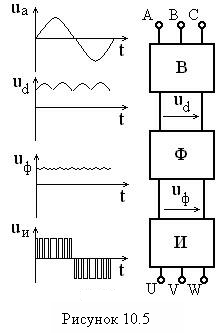
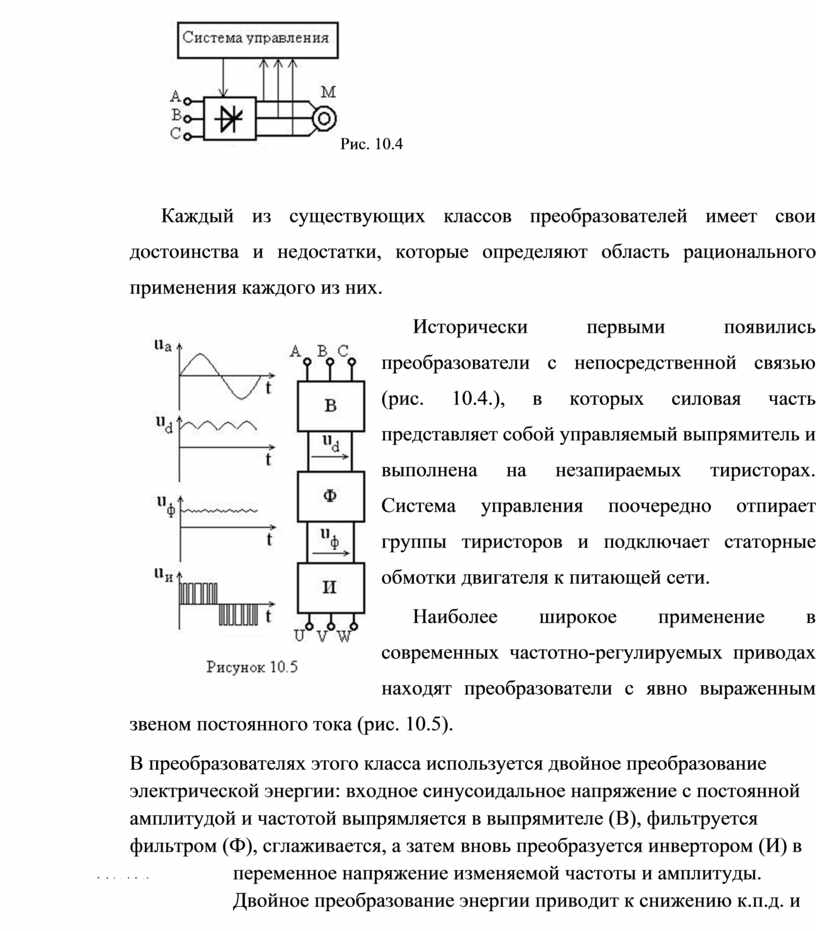
Наиболее широкое применение в современных частотно-регулируемых приводах находят преобразователи с явно выраженным звеном постоянного тока (рис. 10.5).
![]()
![]() В преобразователях
этого класса используется двойное преобразование электрической энергии: входное
синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в
выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется
инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное
преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению
массогабаритных показателей по отношению к преобразователям с непосредственной
связью.
В преобразователях
этого класса используется двойное преобразование электрической энергии: входное
синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в
выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется
инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное
преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению
массогабаритных показателей по отношению к преобразователям с непосредственной
связью.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO, их усовершенствованные модификации GCT, IGCT, SGCT и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95–98%).
Тиристор является полууправляемым прибором: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором (IGBT транзисторы) отличают от тиристоров полная управляемость, простая неэнергоемкая система управления, самая высокая рабочая частота.
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Ниже рассмотрен принцип действия ПЧ при формировании однофазного напряжения.
ЗАКЛЮЧИТЕЛЬНАЯ ЧАСТЬ
- подвести итоги занятия;
- напомнить тему, цели и учебные вопросы;
- объявить оценки;
- ответить на вопросы;
- отметить активность и дисциплину на занятии;
- дать задание на самоподготовку.
Список используемой литературы
1. Славинский, А. К. Электротехника с основами электроники : учебное пособие / А. К. Славинский, И. С. Туревский. — Москва : ФОРУМ : ИНФРА-М, 2020. — 448 с.
2. Маркелов, С. Н. Электротехника и электроника : учебное пособие / С.Н. Маркелов, Б.Я. Сазанов. — Москва : ИНФРА-М, 2020. — 267 с.
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.