Поделиться

На рынке промышленных контроллеров отдельную нишу занимают программируемые логические контроллеры (ПЛК) для применения в системах противоаварийной защиты. Системы ПАЗ предназначены для поддержания технологического оборудования и производства в безопасном состоянии, своевременном выявлении и предупреждении аварийной ситуации, проведении аварийных блокировок по заданным алгоритмам в случае возникновения аварийной ситуации, а также останова технологического процесса и оборудования и перевода управляющих механизмов в безопасное для окружающей среды и персонала состояние.
Согласно ПБ 09-170-97 АСУТП должна соответствовать требованиям ГОСТ 24.104 – 85 «Системы автоматического управления технологическими процессами и ПАЗ на базе средств вычислительной и микропроцессорной техники», техническому заданию на систему и обеспечивать следующие функции:
· постоянный контроль параметров процесса и управление режимом для поддержания регламентированных значений этих параметров;
· контроль работоспособного состояния системы ПАЗ и регистрация срабатывания защит;
· постоянный контроль состояния окружающей среды в пределах объекта;
· постоянный анализ изменения параметров в сторону критических значений и прогнозирование возможной аварии;
· контроль с помощью средств управления и ПАЗ за развитием и локализацией опасной ситуации, выбор и реализация оптимальных управляющих воздействий;
· проведение операций безаварийного пуска, остановки и всех необходимых для этого переключений;
· выдача информации о состоянии безопасности на объекте в вышестоящую систему управления.
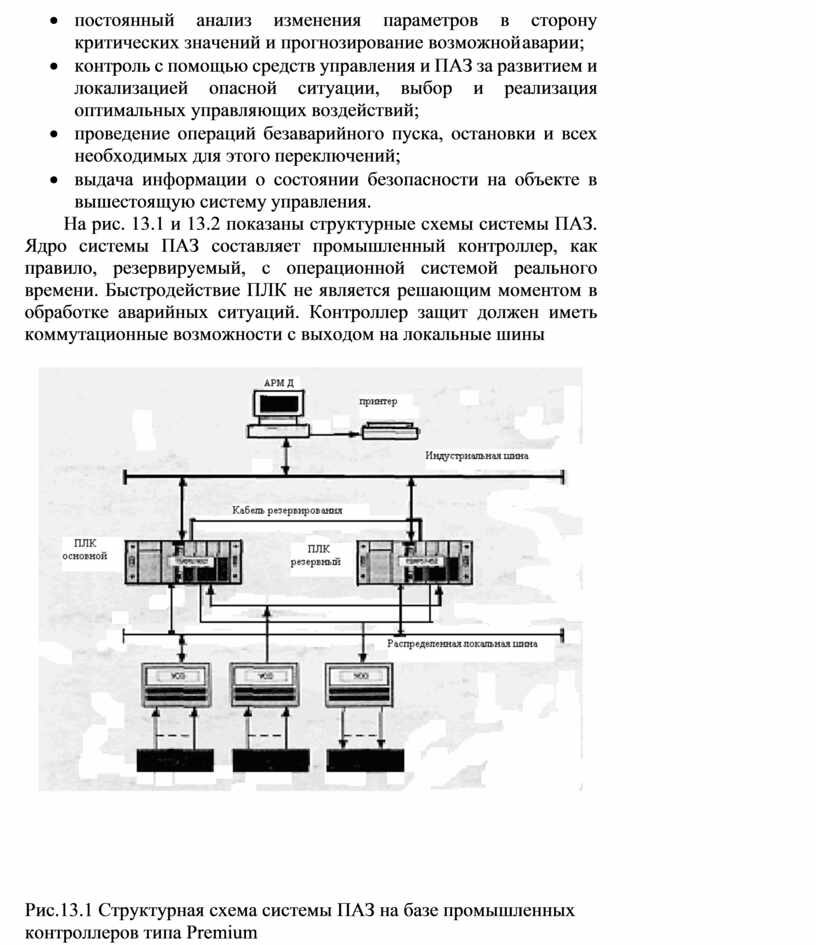
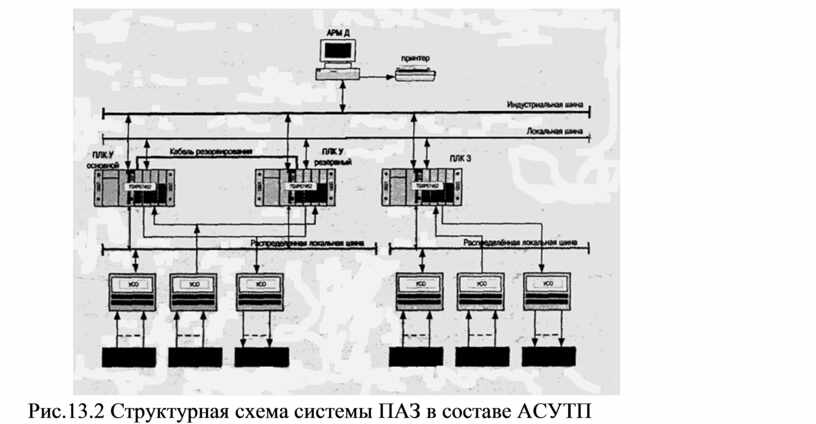
На рис. 13.1 и 13.2 показаны структурные схемы системы ПАЗ. Ядро системы ПАЗ составляет промышленный контроллер, как правило, резервируемый, с операционной системой реального времени. Быстродействие ПЛК не является решающим моментом в обработке аварийных ситуаций. Контроллер защит должен иметь коммутационные возможности с выходом на локальные шины
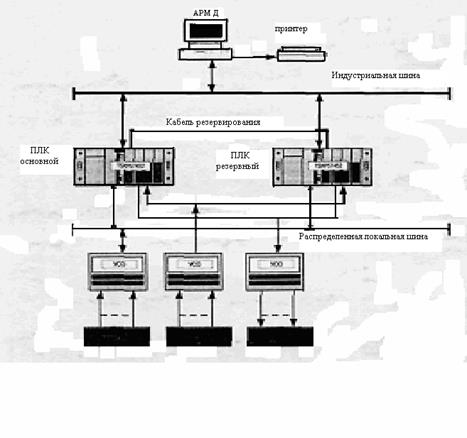 |
Рис.13.1 Структурная схема системы ПАЗ на базе промышленных контроллеров типа Premium
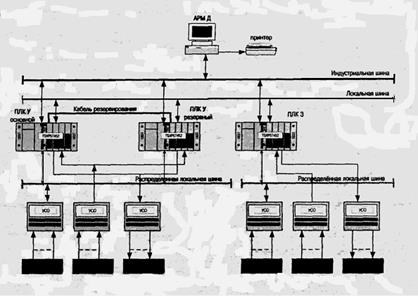
Рис.13.2 Структурная схема системы ПАЗ в составе АСУТП
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.