Поделиться

Введение в БПЛА
Принятые сокращения
БПЛА – беспилотный летательный аппарат
ВПП – взлетно-посадочная полоса
ДВС – двигатель внутреннего сгорания
ЛА – летательный аппарат
РЭБ – радиоэлектронная борьба
ТРД – турбореактивный двигатель
Определение
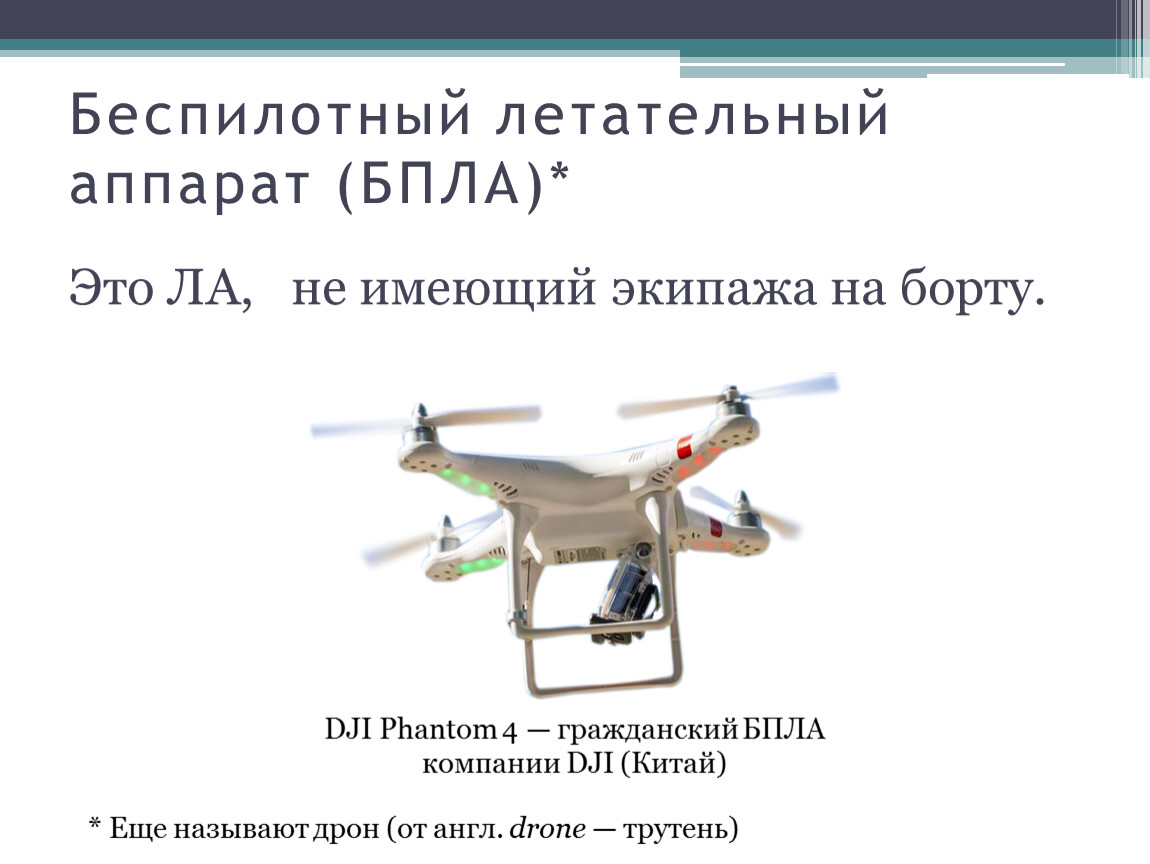
Беспилотный летательный аппарат (БПЛА)*
Это ЛА, не имеющий экипажа на борту.
DJI Phantom 4 — гражданский БПЛА компании DJI (Китай)
* Еще называют дрон (от англ. drone — трутень)
Достоинства и недостатки

Достоинства
нет опасности для жизни пилота
меньше стоимость, чем у пилотируемых ЛА
меньший расход топлива из-за малого веса
можно использовать альтернативные источники энергии (солнечные батареи)
длина взлетно-посадочной полосы не более 600 м
Parrot AR.Drone 2.0, 2010 г.
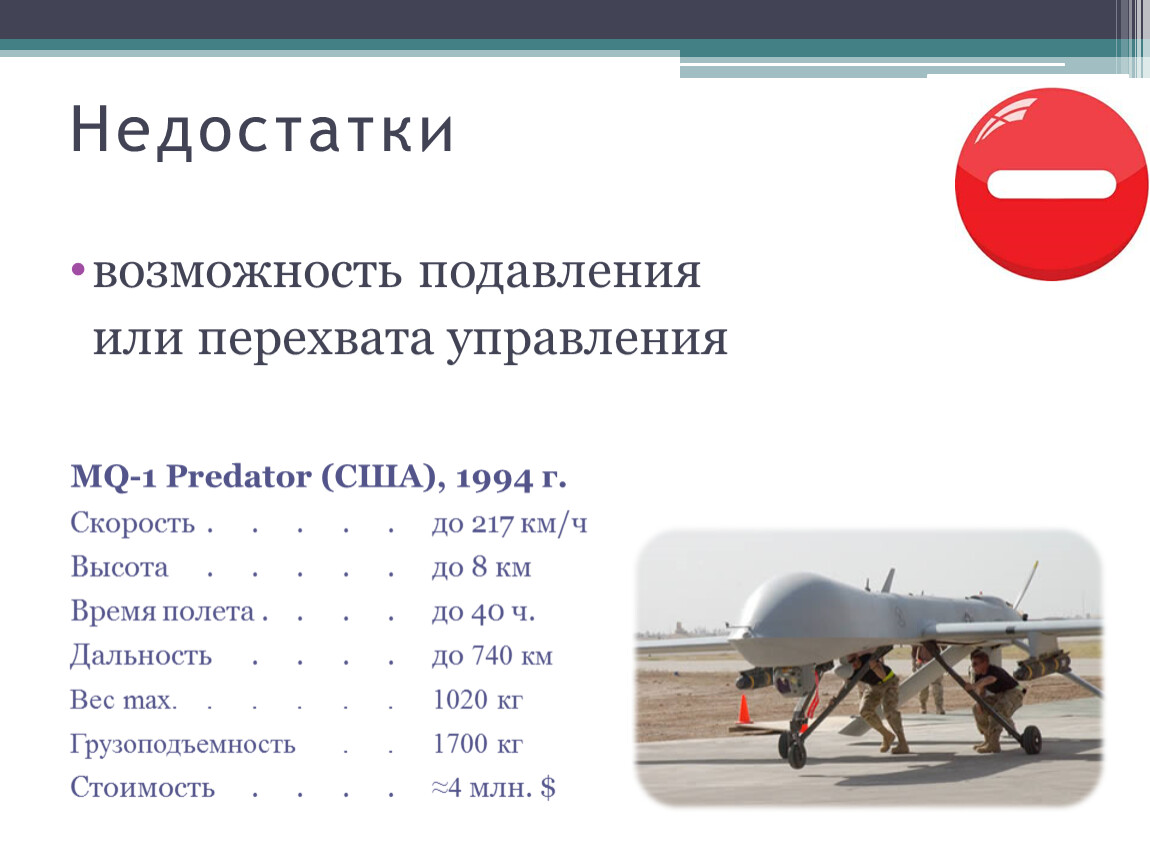
Недостатки
возможность подавления
или перехвата управления
MQ-1 Predator (США), 1994 г.
Классификация
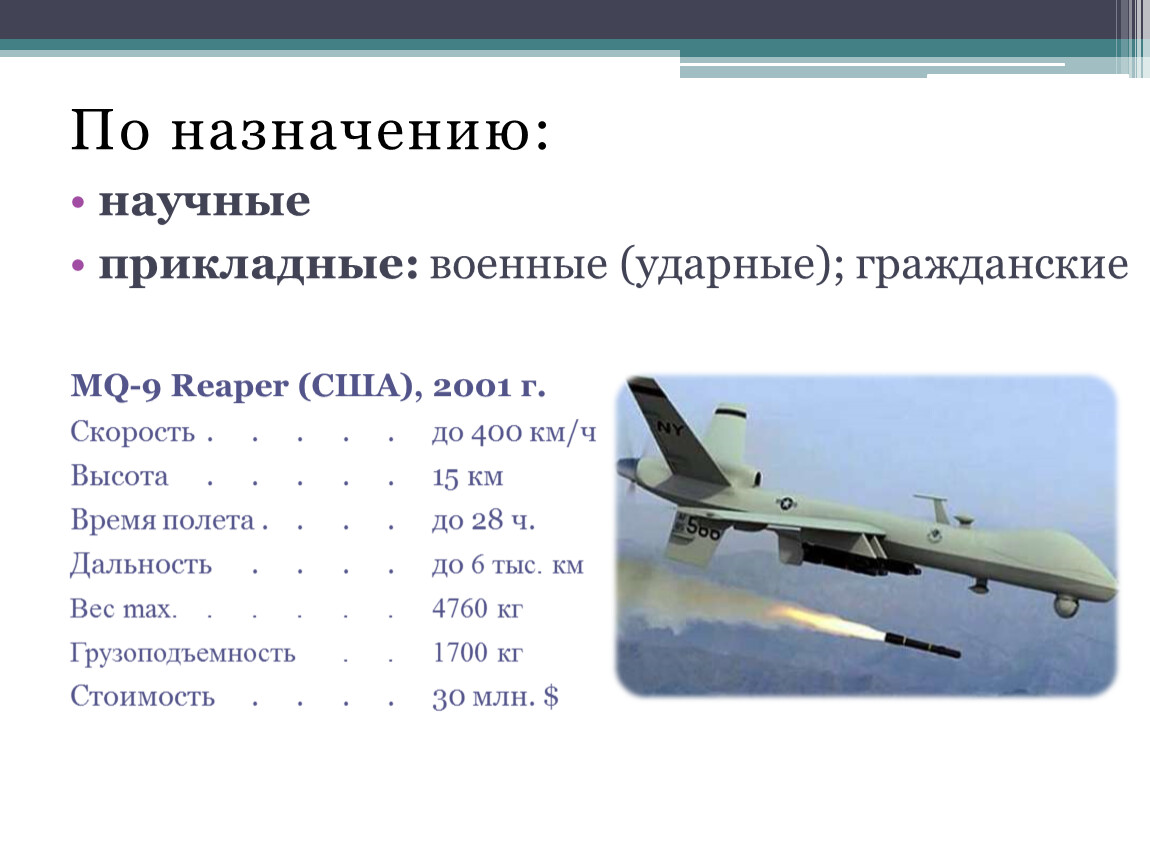
По назначению:
научные
прикладные: военные (ударные); гражданские
MQ-9 Reaper (США), 2001 г.
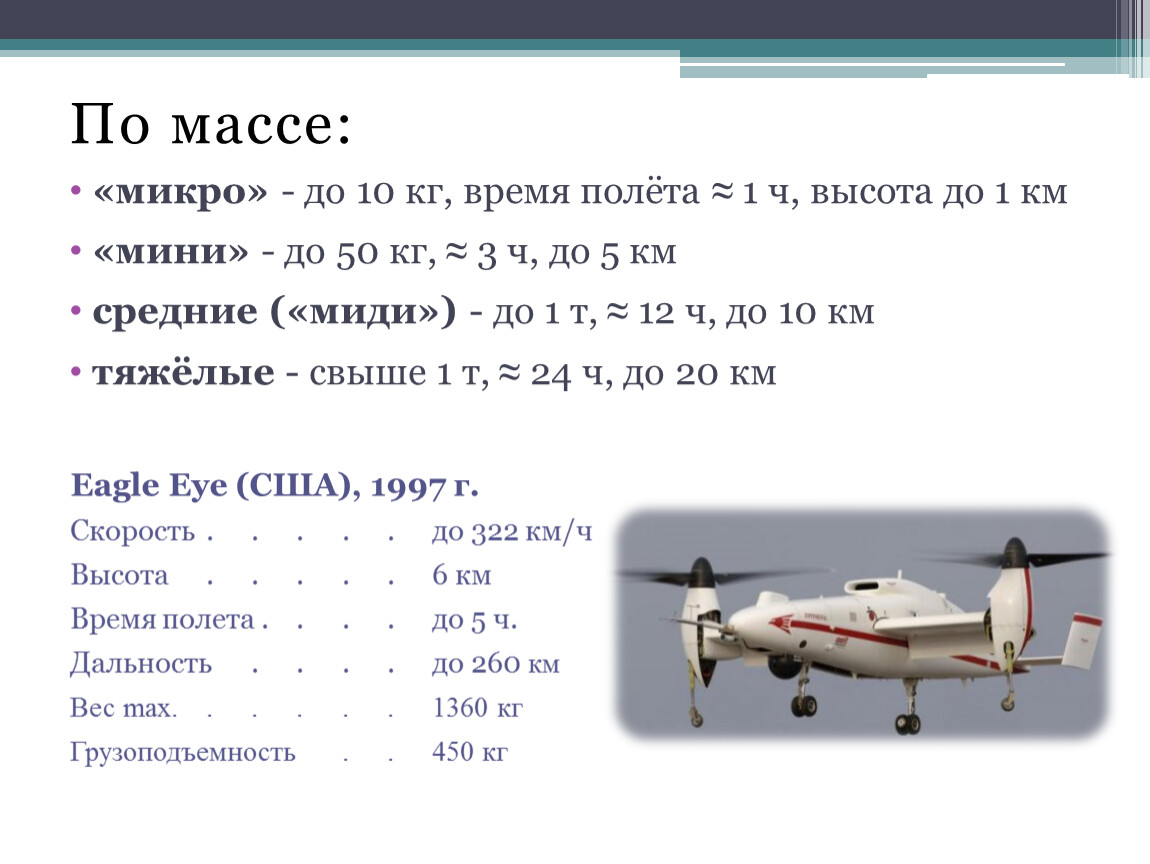
По массе:
«микро» - до 10 кг, время полёта ≈ 1 ч, высота до 1 км
«мини» - до 50 кг, ≈ 3 ч, до 5 км
средние («миди») - до 1 т, ≈ 12 ч, до 10 км
тяжёлые - свыше 1 т, ≈ 24 ч, до 20 км
Eagle Eye (США), 1997 г.
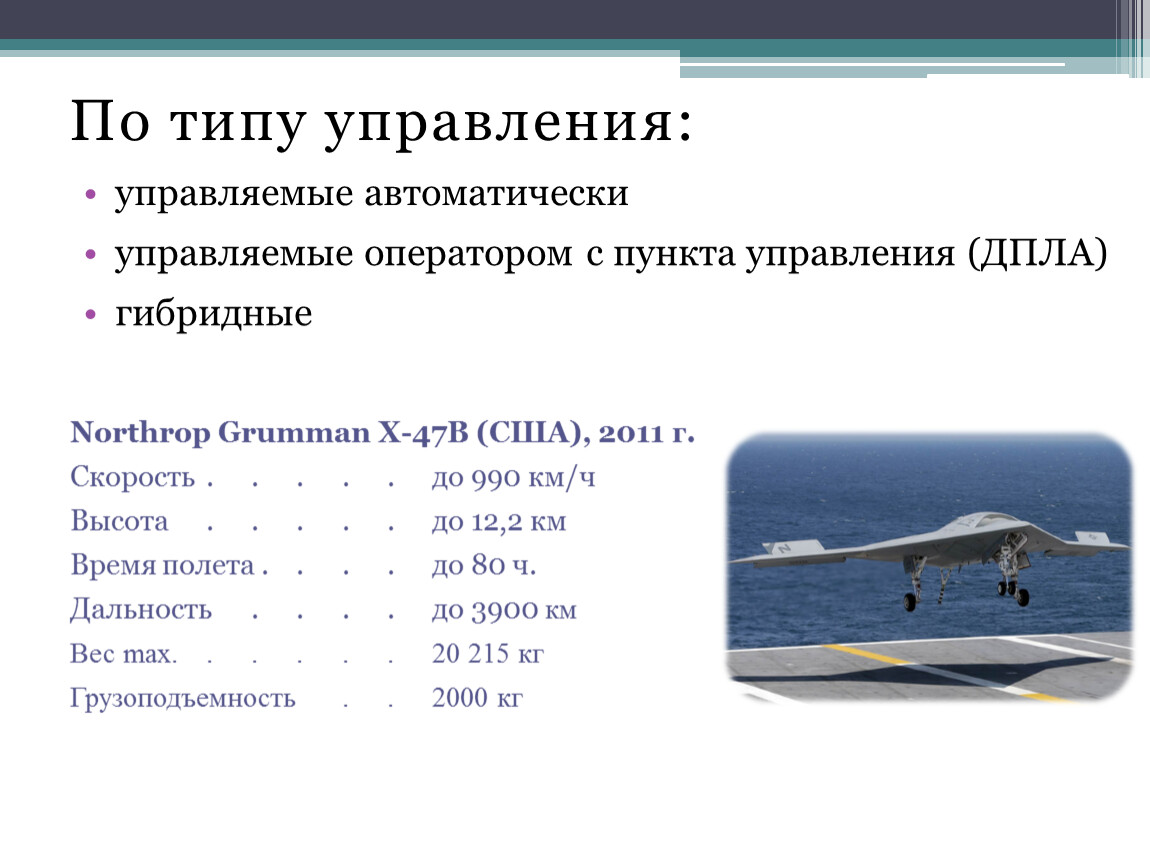
По типу управления:
управляемые автоматически
управляемые оператором с пункта управления (ДПЛА)
гибридные
Northrop Grumman X-47B (США), 2011 г.
По принципу полета:
с жестким крылом (самолетного типа)
с гибким крылом
с вращающимся крылом (вертолетного типа)
автожиры
конвертопланы
мультикоптеры
с машущим крылом
аэростатические
гибридные
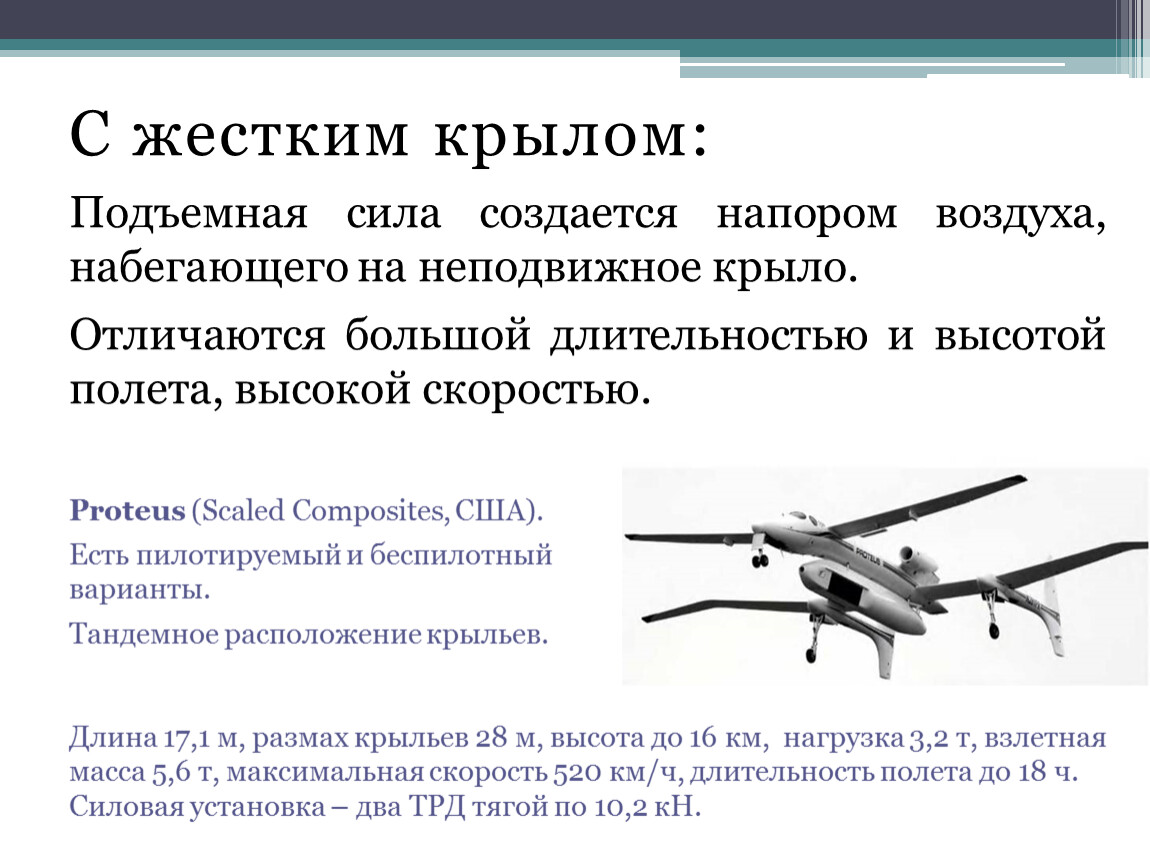
С жестким крылом:
Подъемная сила создается напором воздуха, набегающего на неподвижное крыло.
Отличаются большой длительностью и высотой полета, высокой скоростью.
Proteus (Scaled Composites, США).
Есть пилотируемый и беспилотный варианты.
Тандемное расположение крыльев.
Длина 17,1 м, размах крыльев 28 м, высота до 16 км, нагрузка 3,2 т, взлетная масса 5,6 т, максимальная скорость 520 км/ч, длительность полета до 18 ч. Силовая установка – два ТРД тягой по 10,2 кН.
С жестким крылом:
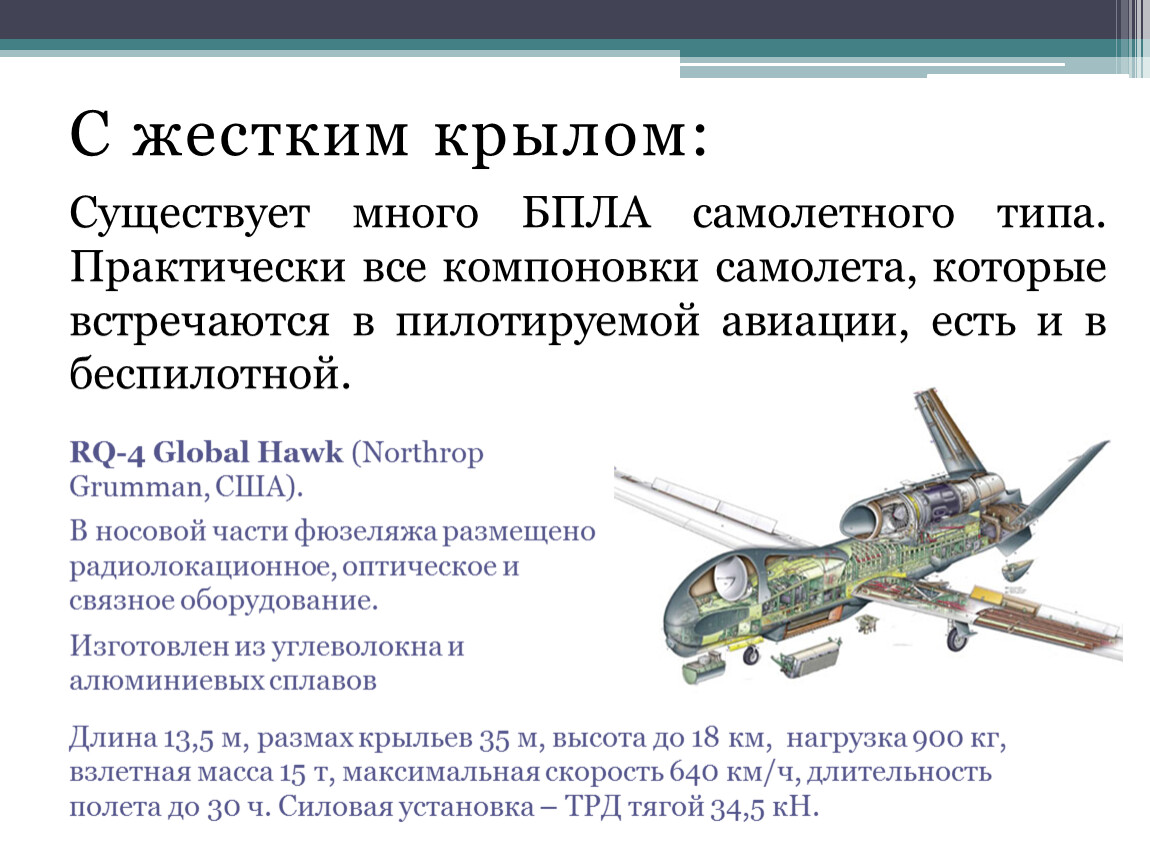
Существует много БПЛА самолетного типа. Практически все компоновки самолета, которые встречаются в пилотируемой авиации, есть и в беспилотной.
RQ-4 Global Hawk (Northrop Grumman, США).
В носовой части фюзеляжа размещено радиолокационное, оптическое и связное оборудование.
Изготовлен из углеволокна и алюминиевых сплавов
Длина 13,5 м, размах крыльев 35 м, высота до 18 км, нагрузка 900 кг, взлетная масса 15 т, максимальная скорость 640 км/ч, длительность полета до 30 ч. Силовая установка – ТРД тягой 34,5 кН.
С жестким крылом:
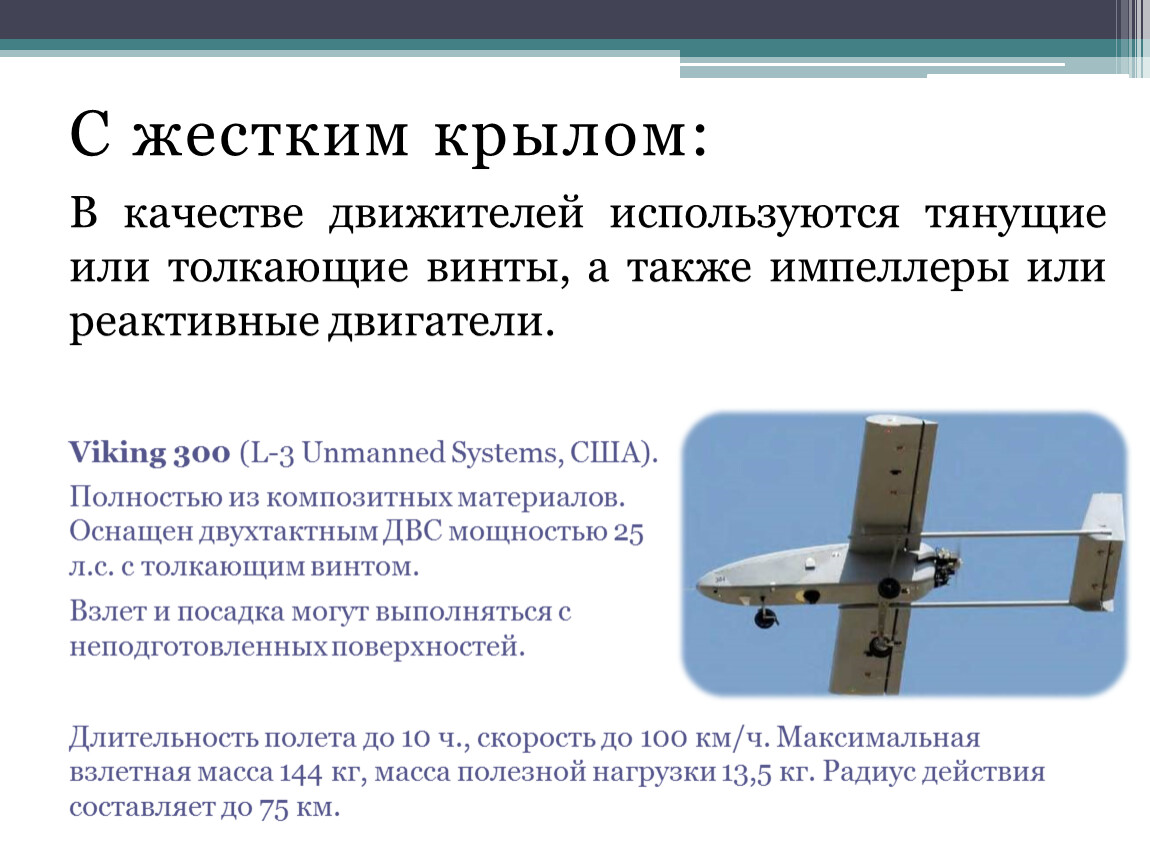
В качестве движителей используются тянущие или толкающие винты, а также импеллеры или реактивные двигатели.
Viking 300 (L-3 Unmanned Systems, США).
Полностью из композитных материалов. Оснащен двухтактным ДВС мощностью 25 л.с. с толкающим винтом.
Взлет и посадка могут выполняться с неподготовленных поверхностей.
Длительность полета до 10 ч., скорость до 100 км/ч. Максимальная взлетная масса 144 кг, масса полезной нагрузки 13,5 кг. Радиус действия составляет до 75 км.
С жестким крылом:
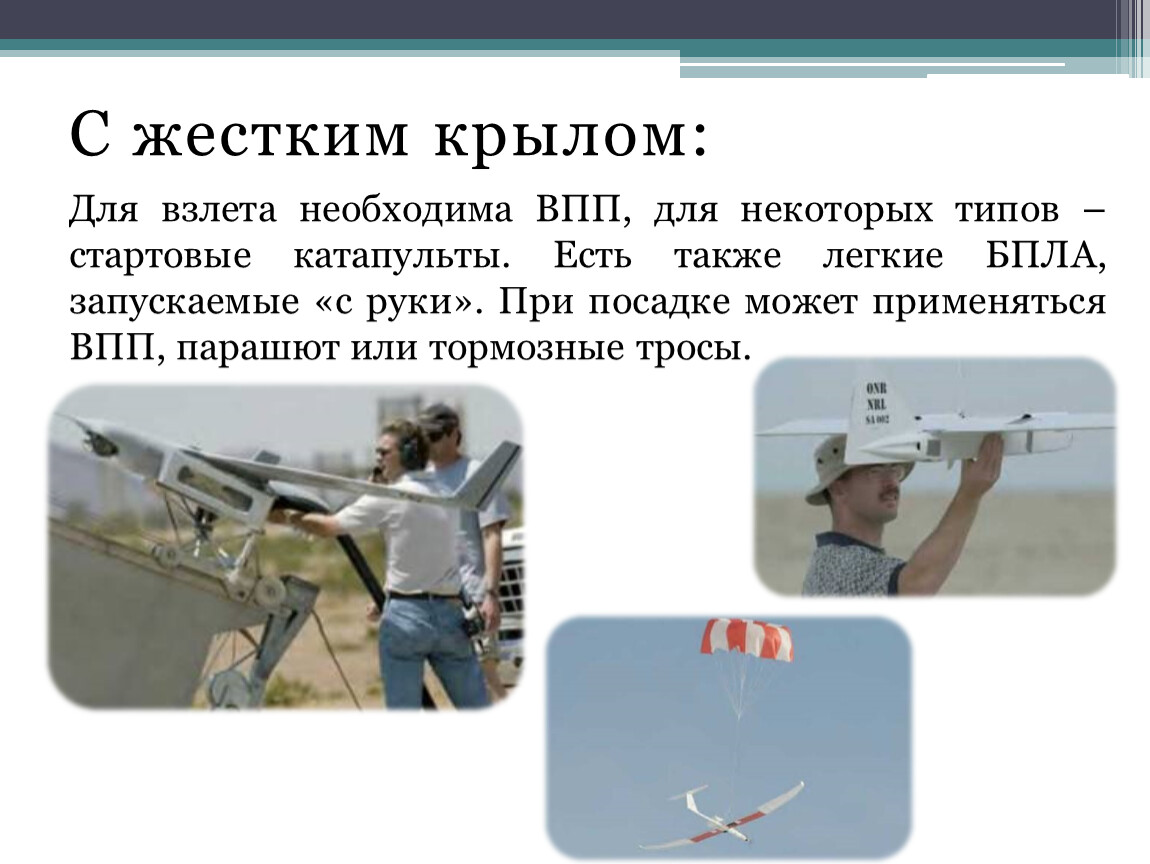
Для взлета необходима ВПП, для некоторых типов – стартовые катапульты. Есть также легкие БПЛА, запускаемые «с руки». При посадке может применяться ВПП, парашют или тормозные тросы.
С жестким крылом:
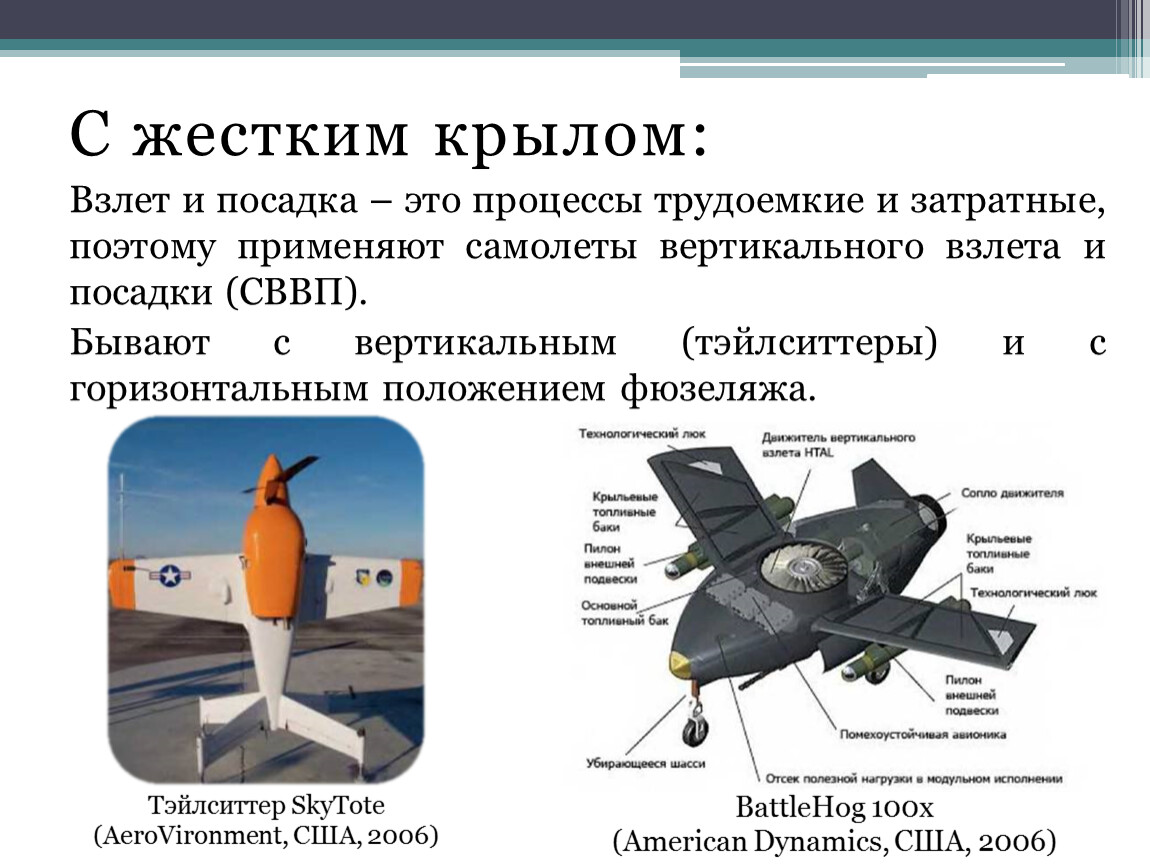
Взлет и посадка – это процессы трудоемкие и затратные, поэтому применяют самолеты вертикального взлета и посадки (СВВП).
Бывают с вертикальным (тэйлситтеры) и с горизонтальным положением фюзеляжа.
Тэйлситтер SkyTote (AeroVironment, США, 2006)
BattleHog 100х
(American Dynamics, США, 2006)
С жестким крылом:
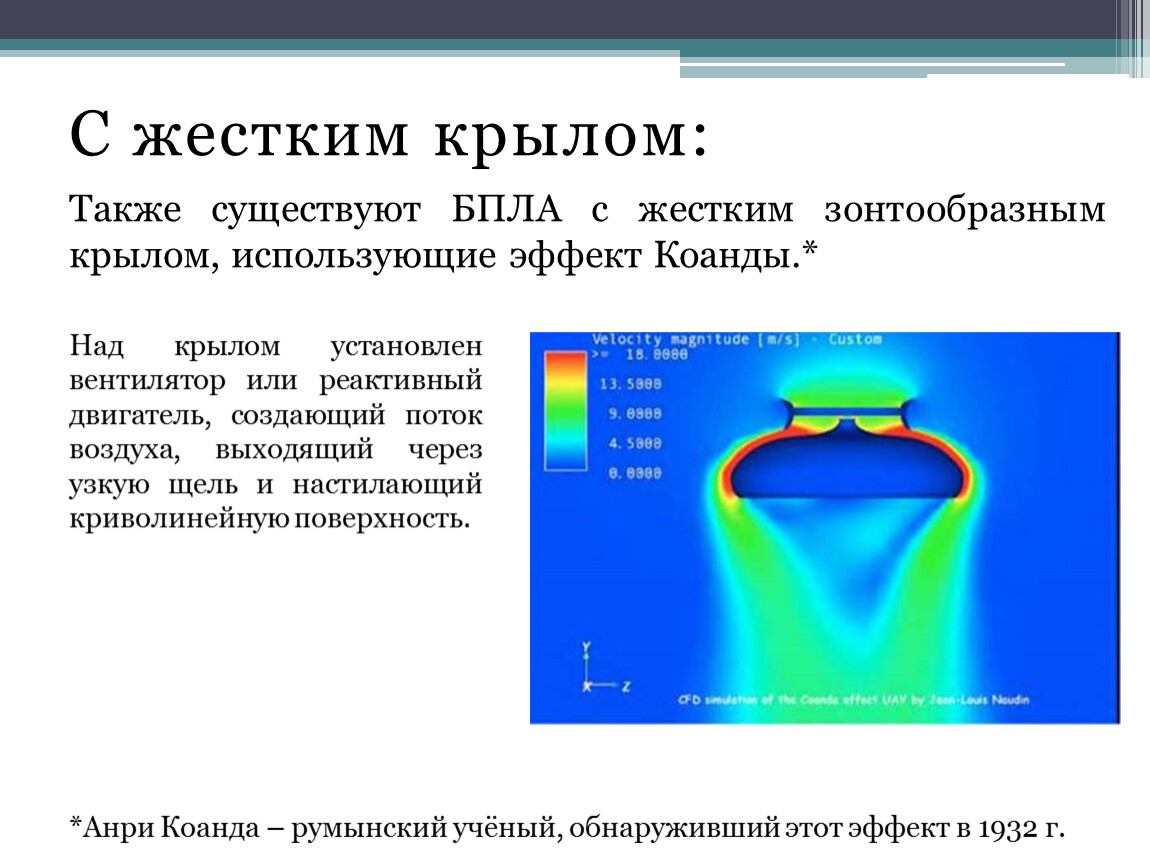
Также существуют БПЛА с жестким зонтообразным крылом, использующие эффект Коанды.*
*Анри Коанда – румынский учёный, обнаруживший этот эффект в 1932 г.
Над крылом установлен вентилятор или реактивный двигатель, создающий поток воздуха, выходящий через узкую щель и настилающий криволинейную поверхность.
С жестким крылом:
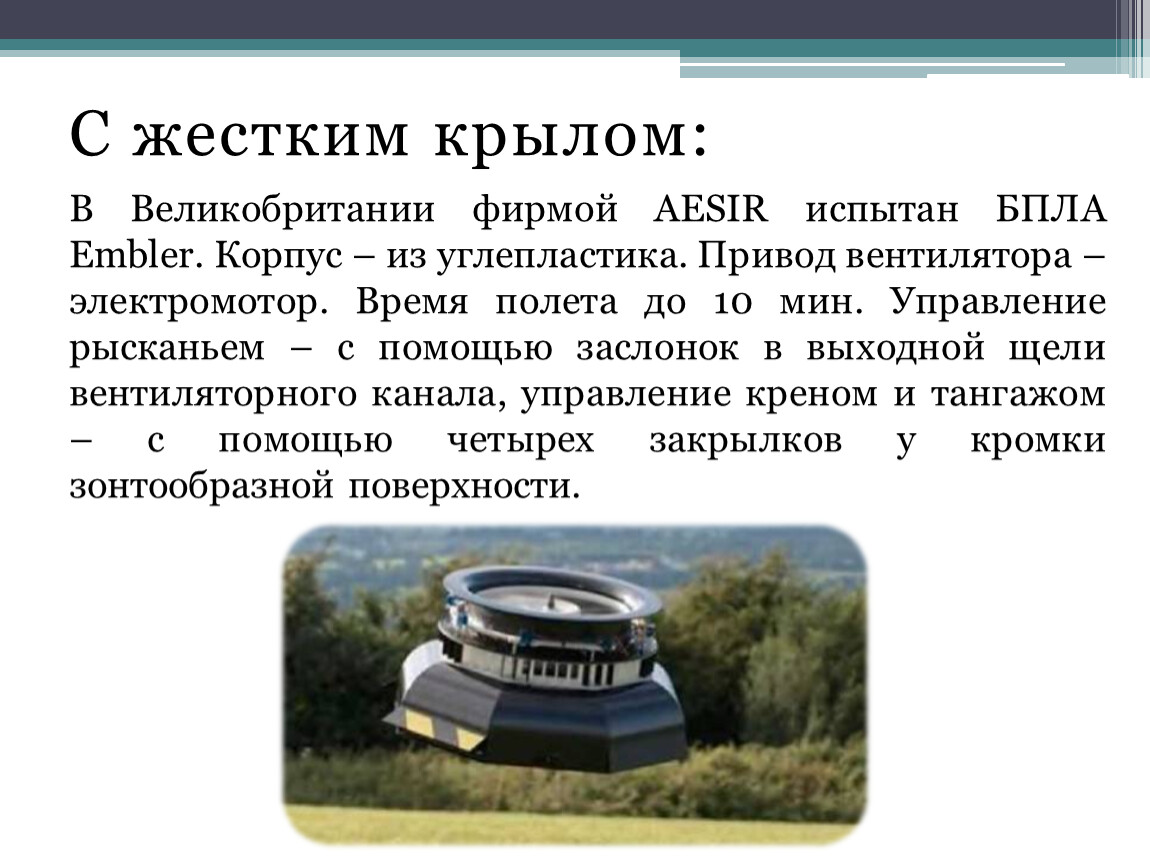
В Великобритании фирмой AESIR испытан БПЛА Embler. Корпус – из углепластика. Привод вентилятора – электромотор. Время полета до 10 мин. Управление рысканьем – с помощью заслонок в выходной щели вентиляторного канала, управление креном и тангажом – с помощью четырех закрылков у кромки зонтообразной поверхности.

С жестким крылом:
Также компания AESIR объявила о построении крупного БПЛА Hoder. Он будет иметь 2 вентиляторных движителя, приводимых от ДВС. Угол расположения лопаток вентиляторов регулируемый для управления полетом. Собственная масса 1500 кг, масса полезной нагрузки 500 кг. Продолжительность полета до 8 ч.
С гибким крылом:
Это дешевые и экономичные ЛА, в которых используется не жесткое, а гибкое (мягкое) крыло из ткани, эластичного или композитного полимерного материала.
Среди них можно выделить:
моторизованные парапланы;
моторизованные дельтапланы.
С гибким крылом:
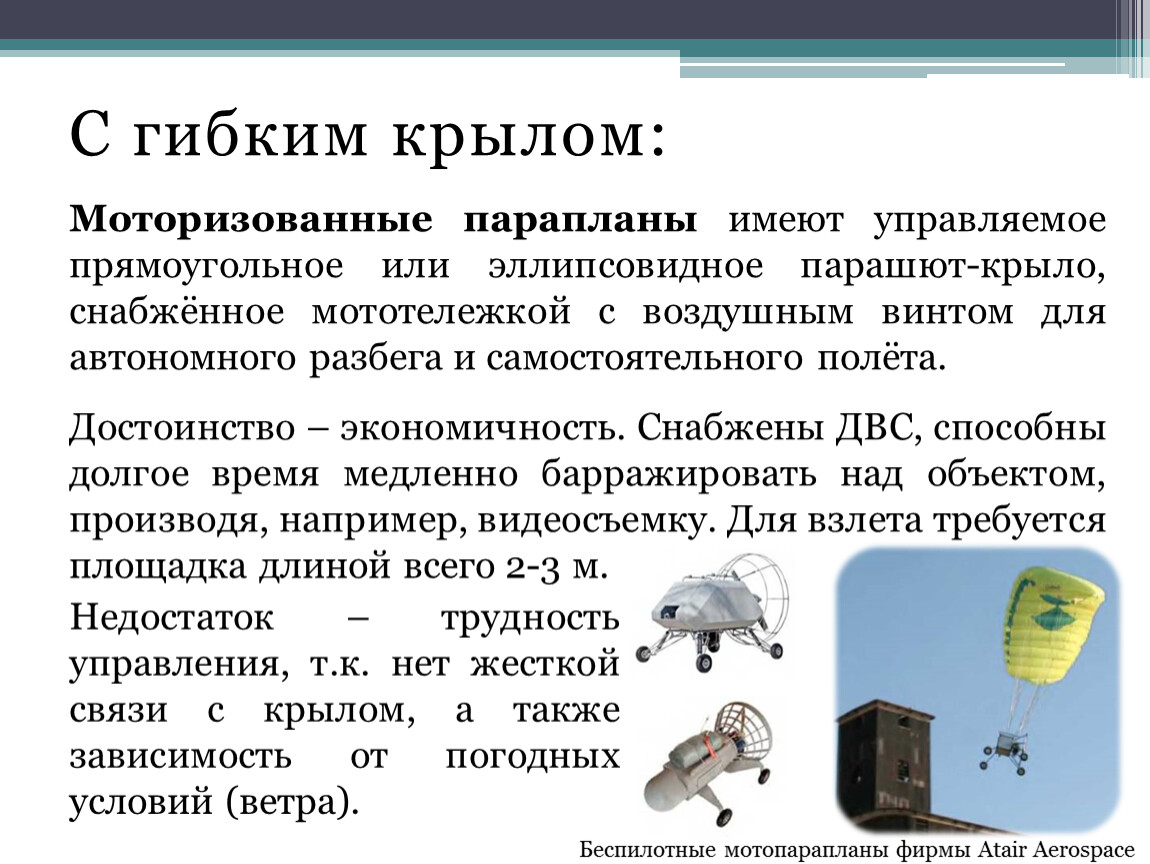
Моторизованные парапланы имеют управляемое прямоугольное или эллипсовидное парашют-крыло, снабжённое мототележкой с воздушным винтом для автономного разбега и самостоятельного полёта.
Достоинство – экономичность. Снабжены ДВС, способны долгое время медленно барражировать над объектом, производя, например, видеосъемку. Для взлета требуется площадка длиной всего 2-3 м.
Недостаток – трудность управления, т.к. нет жесткой связи с крылом, а также зависимость от погодных условий (ветра).
Беспилотные мотопарапланы фирмы Atair Aerospace
С гибким крылом:
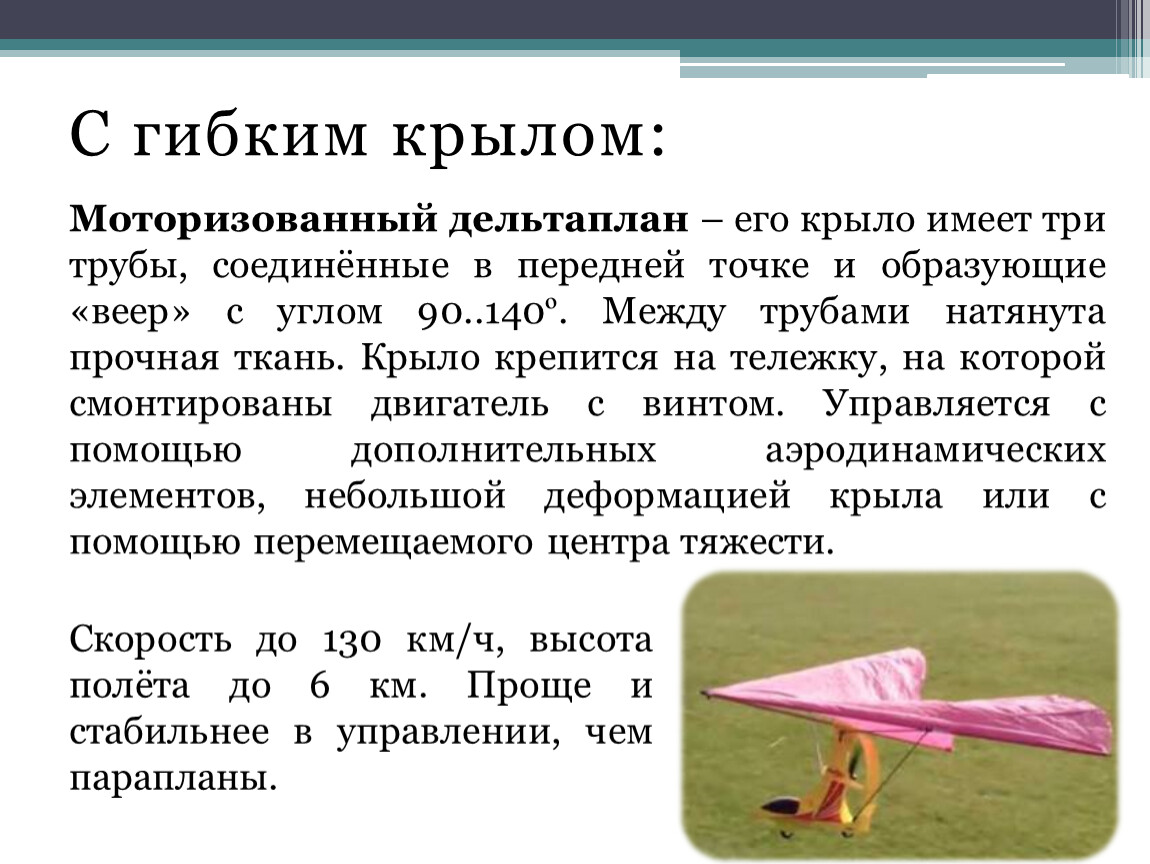
Моторизованный дельтаплан – его крыло имеет три трубы, соединённые в передней точке и образующие «веер» с углом 90..140º. Между трубами натянута прочная ткань. Крыло крепится на тележку, на которой смонтированы двигатель с винтом. Управляется с помощью дополнительных аэродинамических элементов, небольшой деформацией крыла или с помощью перемещаемого центра тяжести.
Скорость до 130 км/ч, высота полёта до 6 км. Проще и стабильнее в управлении, чем парапланы.
БПЛА вертолетного типа:
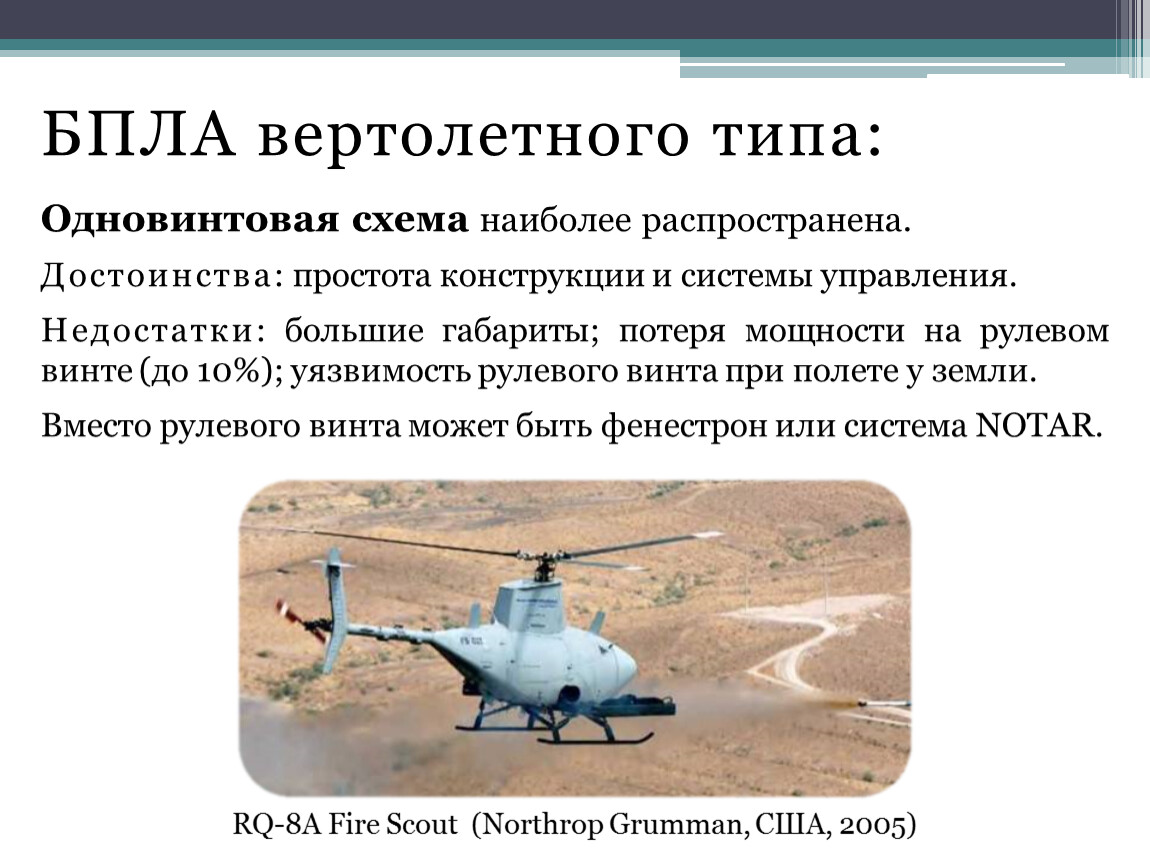
Одновинтовая схема наиболее распространена.
Достоинства: простота конструкции и системы управления.
Недостатки: большие габариты; потеря мощности на рулевом винте (до 10%); уязвимость рулевого винта при полете у земли.
Вместо рулевого винта может быть фенестрон или система NOTAR.
RQ-8A Fire Scout (Northrop Grumman, США, 2005)
БПЛА вертолетного типа:
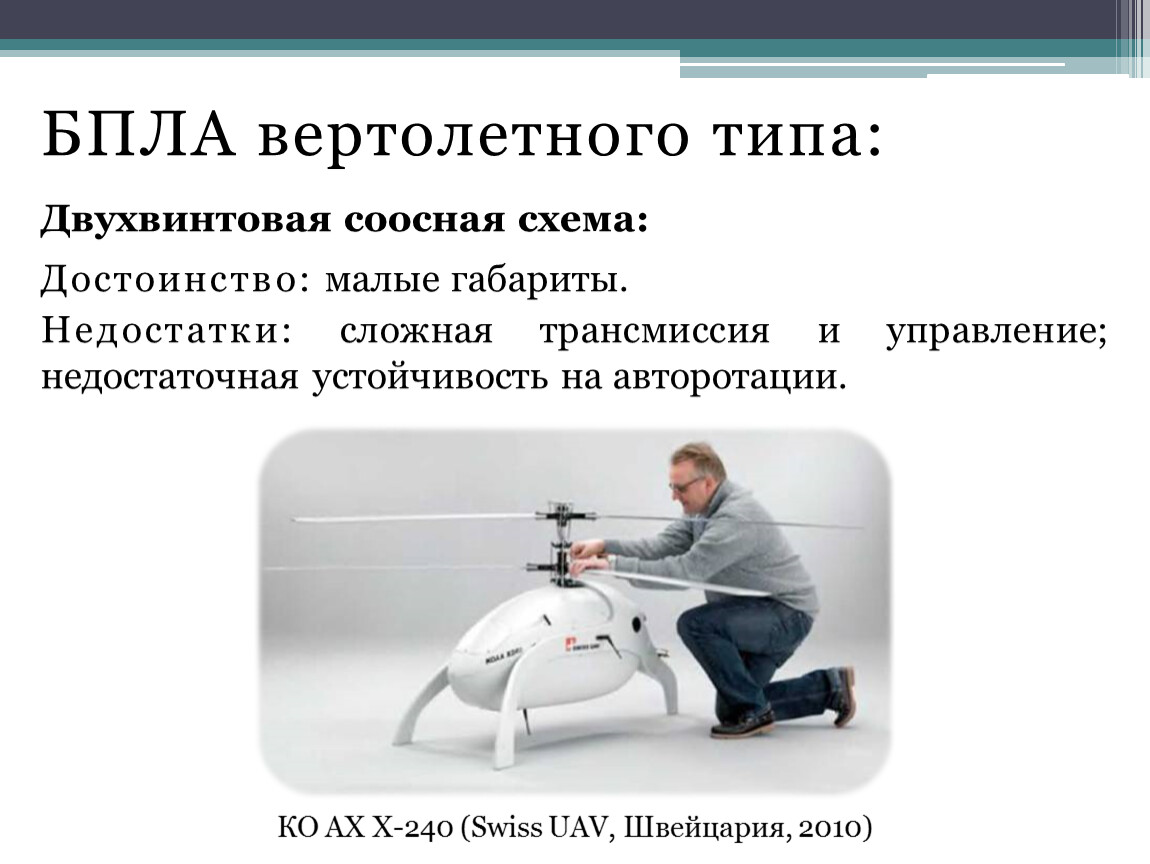
Двухвинтовая соосная схема:
Достоинство: малые габариты.
Недостатки: сложная трансмиссия и управление; недостаточная устойчивость на авторотации.
КО АХ Х-240 (Swiss UAV, Швейцария, 2010)
БПЛА вертолетного типа:
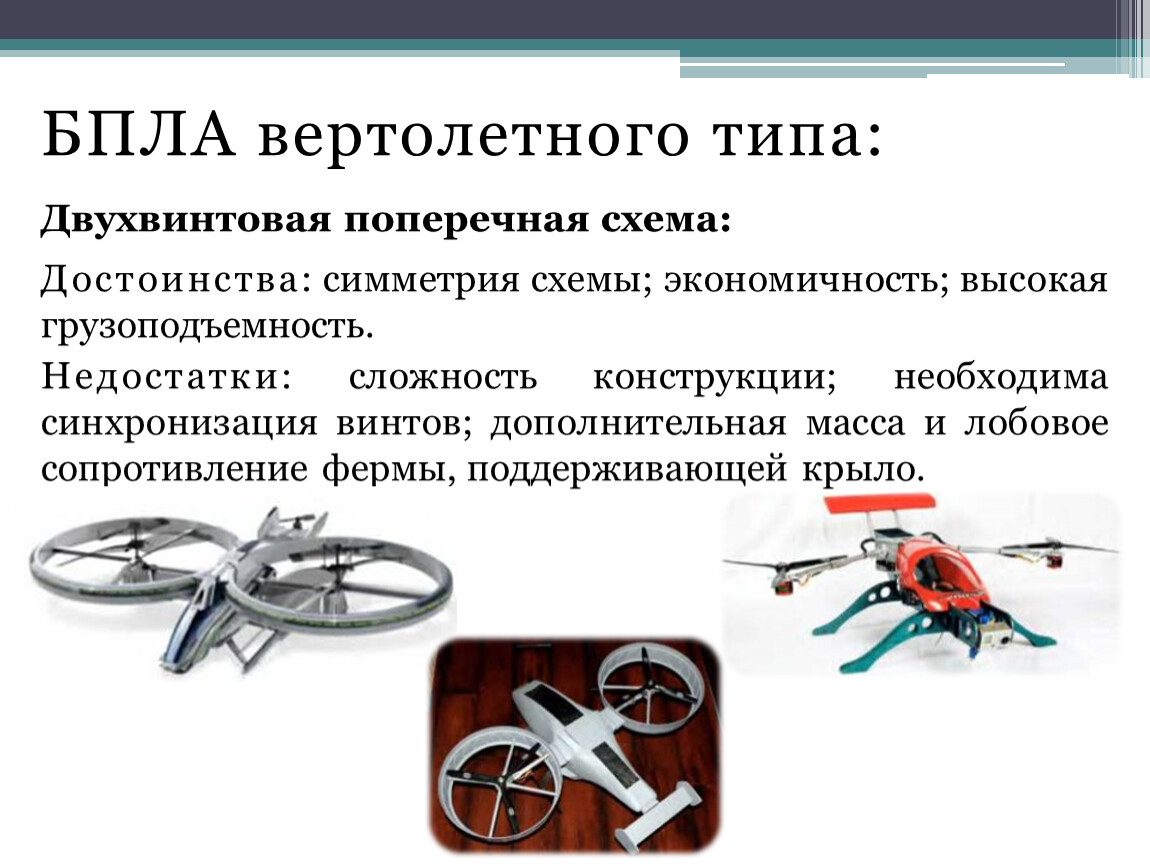
Двухвинтовая поперечная схема:
Достоинства: симметрия схемы; экономичность; высокая грузоподъемность.
Недостатки: сложность конструкции; необходима синхронизация винтов; дополнительная масса и лобовое сопротивление фермы, поддерживающей крыло.
БПЛА вертолетного типа:
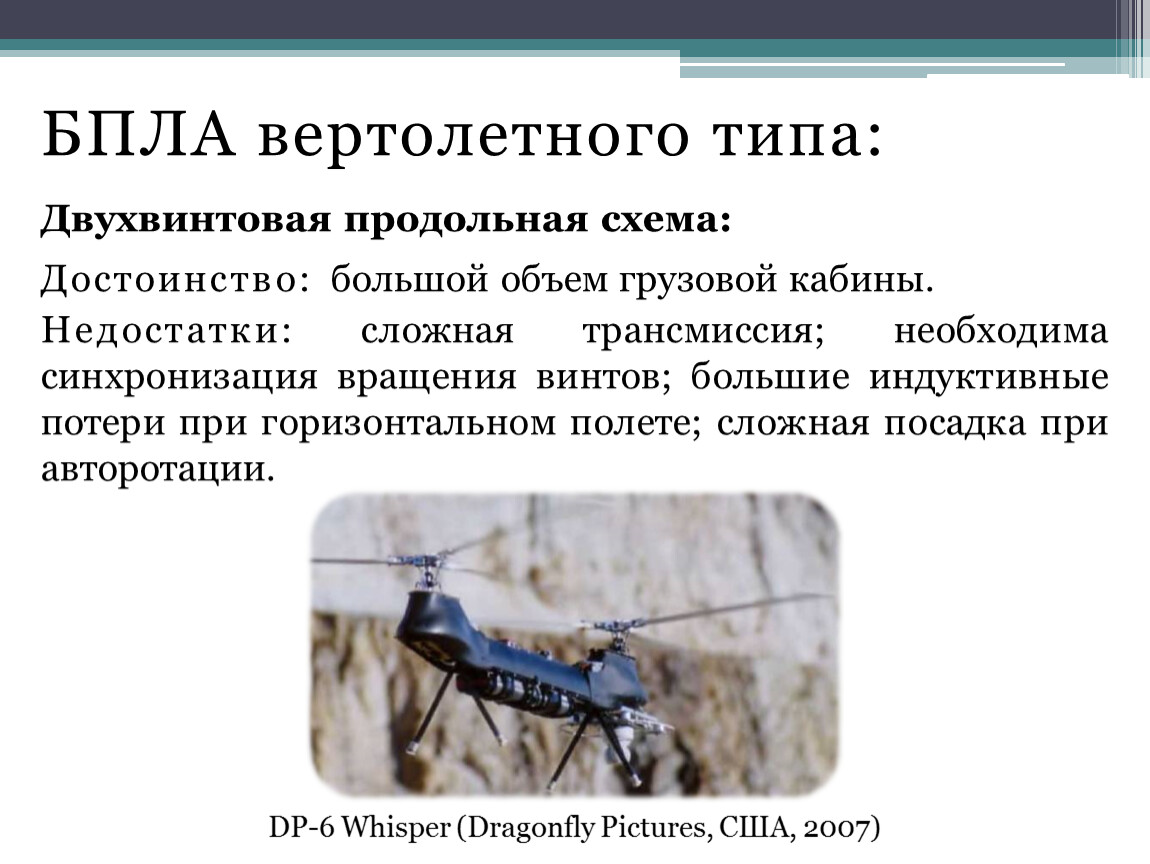
Двухвинтовая продольная схема:
Достоинство: большой объем грузовой кабины.
Недостатки: сложная трансмиссия; необходима синхронизация вращения винтов; большие индуктивные потери при горизонтальном полете; сложная посадка при авторотации.
DP-6 Whisper (Dragonfly Pictures, США, 2007)
БПЛА вертолетного типа:
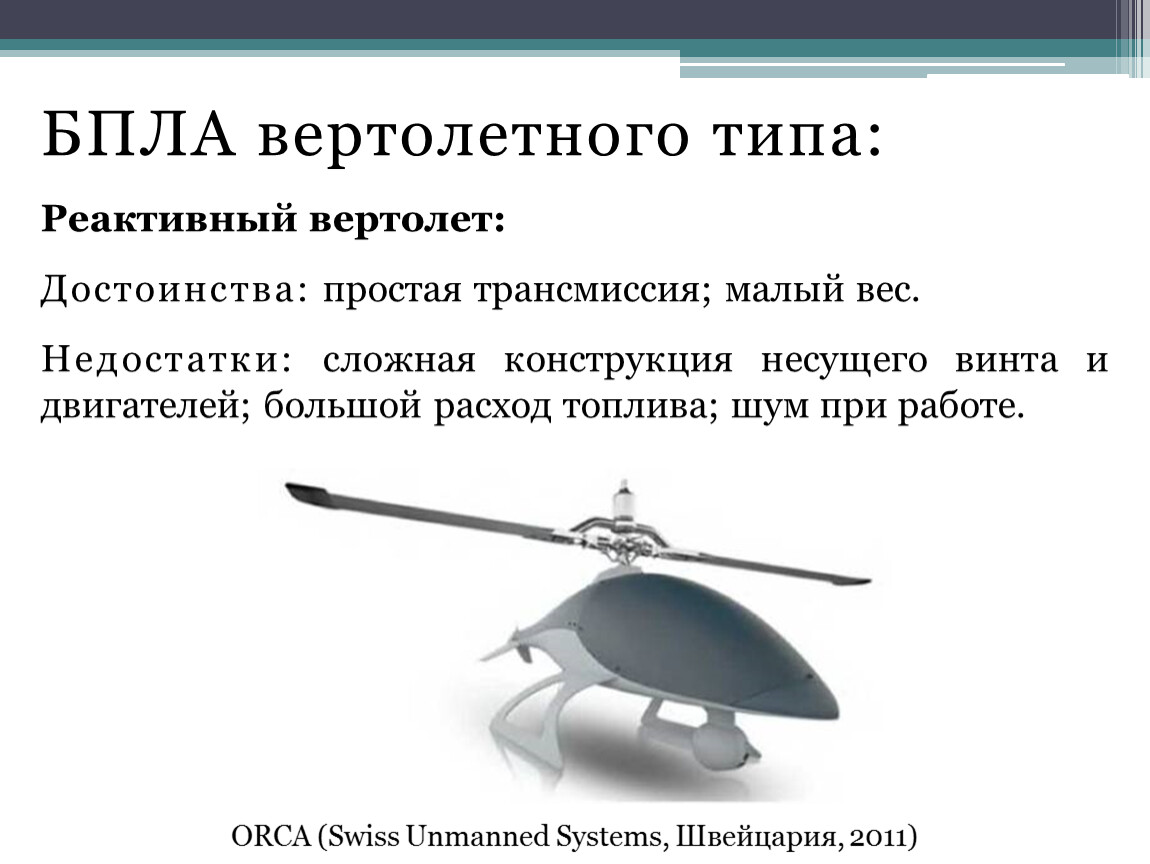
Реактивный вертолет:
Достоинства: простая трансмиссия; малый вес.
Недостатки: сложная конструкция несущего винта и двигателей; большой расход топлива; шум при работе.
ORCA (Swiss Unmanned Systems, Швейцария, 2011)
БПЛА вертолетного типа:
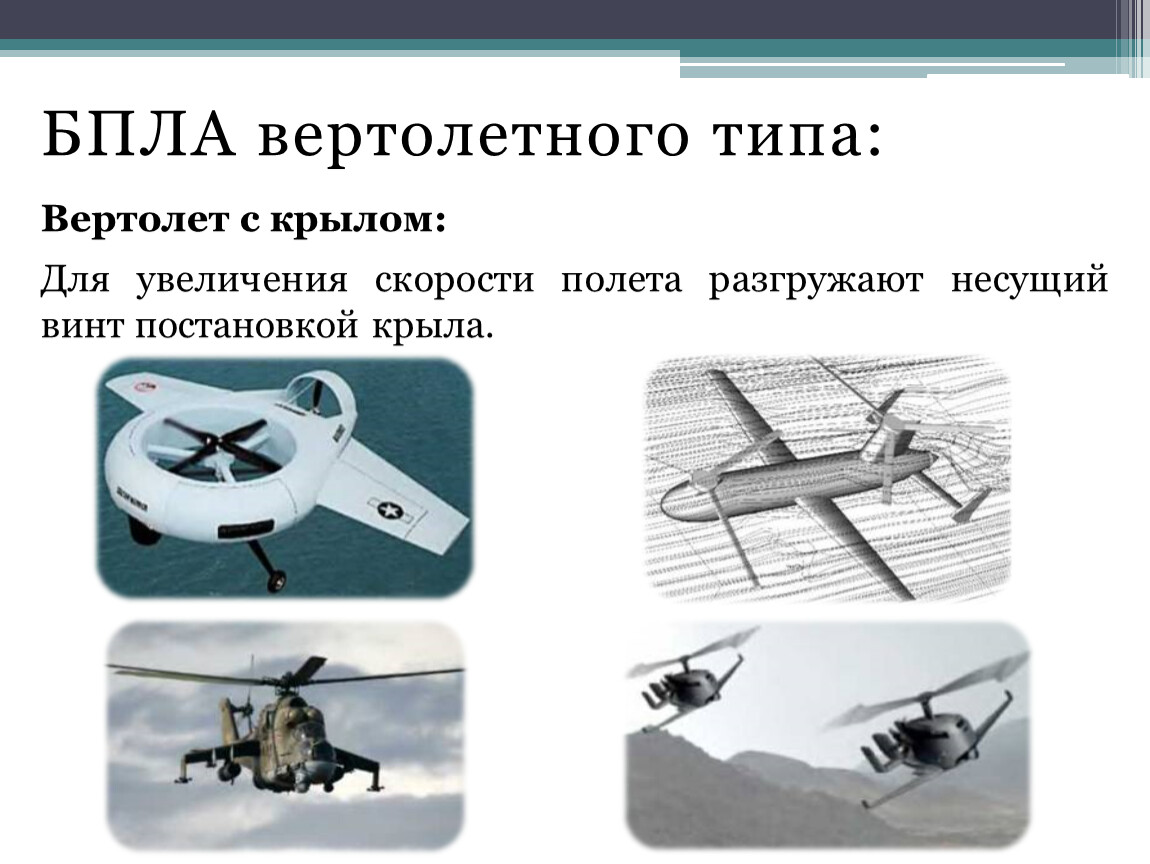
Вертолет с крылом:
Для увеличения скорости полета разгружают несущий винт постановкой крыла.
Винтокрылы:
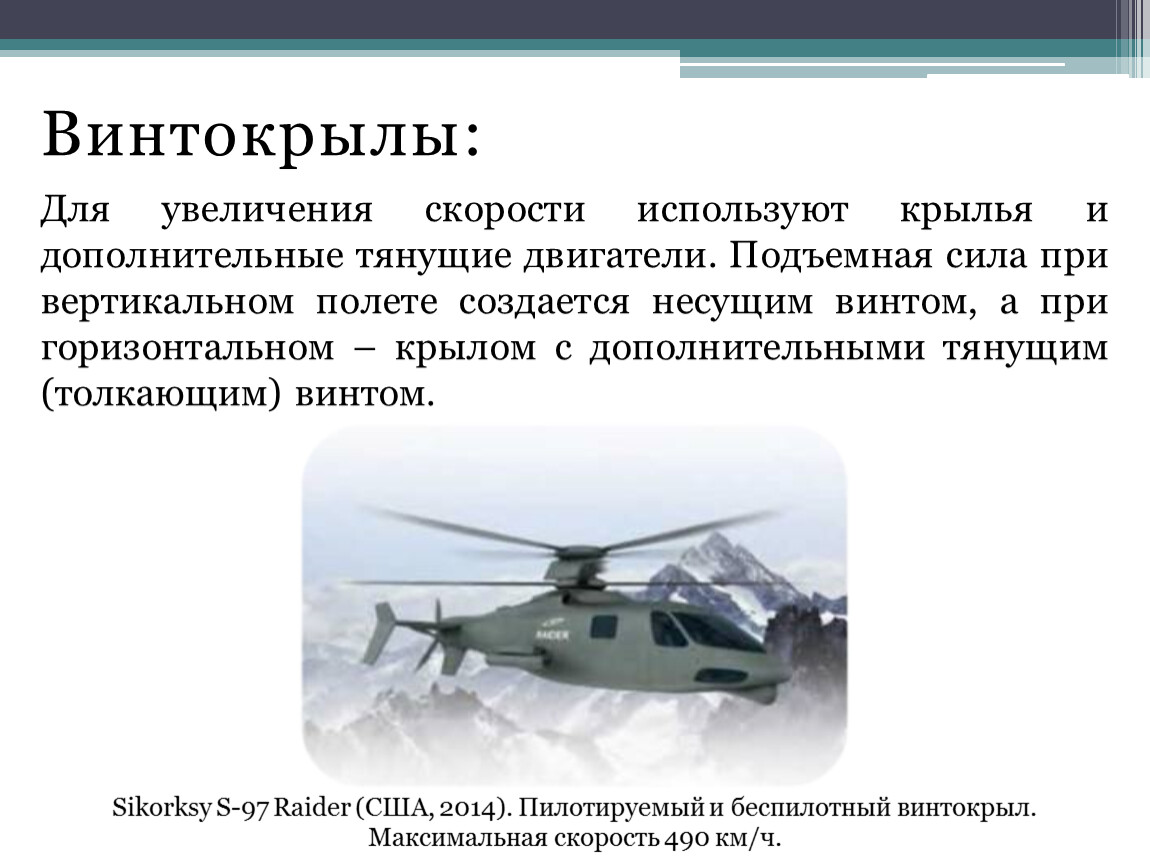
Для увеличения скорости используют крылья и дополнительные тянущие двигатели. Подъемная сила при вертикальном полете создается несущим винтом, а при горизонтальном – крылом с дополнительными тянущим (толкающим) винтом.
Sikorksy S-97 Raider (США, 2014). Пилотируемый и беспилотный винтокрыл.
Максимальная скорость 490 км/ч.
Автожиры:
Вместо крыла используется свободно вращающийся винт. Есть также маршевый тянущий (толкающий) винт, который сообщает автожиру горизонтальную скорость.
Беспилотный автожир «Химик» (Россия, 2012)

Конвертопланы:
ЛА с поворотными винтами, которые на взлёте и при посадке работают как подъёмные, а в горизонтальном полёте – как тянущие.
Smart с поворотными винтами типа Tiltrotor (Южная Корея, 2011)
AD-150 с поворотными импеллерами (American Dynamics, США, 2008)
Tiltwing на вертикальном взлете
(GH Craft, Япония, 2008)
Spirit - БПЛА типа Freewing
(Flight Technologies, США)

Мультикоптеры:
Имеют больше двух несущих винтов.
Трикоптер обычно движется двумя винтами вперед, а третий является хвостовым. Первые два винта имеют противоположные направления вращения и взаимно компенсируют реактивные моменты, у хвостового винта пары нет, поэтому для компенсации реактивного момента ось вращения этого винта немного наклоняют в сторону, противоположную направлению закручивания.
Трикоптер и сервопривод отклонения его хвостового ротора
Мультикоптеры:
Однако есть другие схемы, в которых корпуса всех двигателей жестко зафиксированы на своих местах. Причем все двигатели имеют симметричные им относительно горизонтальной плоскости двигатели с толкающими винтами, направленными вниз. Управление курсовым углом осуществляется изменением частоты вращения винтов.
У6-коптер

Мультикоптеры:
Квадрокоптер ‒ самая распространенная среди мультикоптеров схема. Четыре жестко зафиксированных ротора дают возможность организовать довольно простое управление.
Квадрокоптер с видеокамерой
Мультикоптеры:
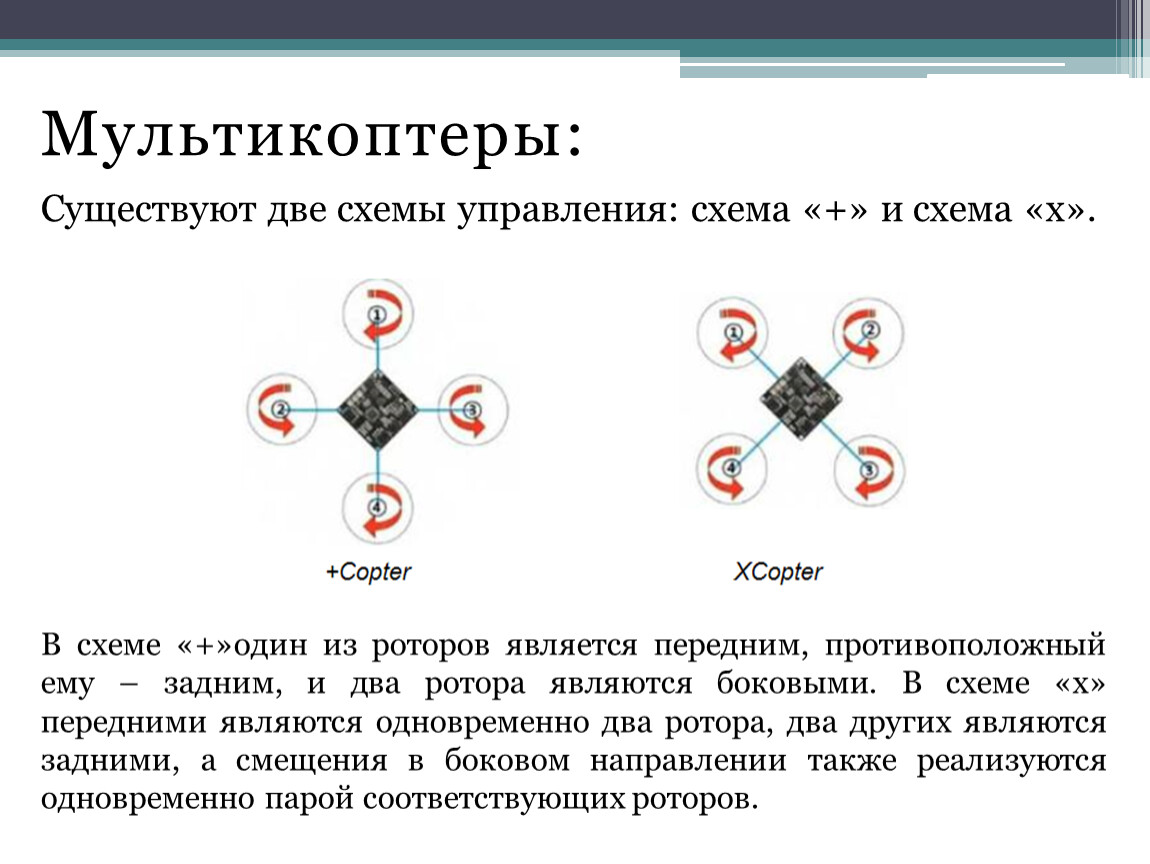
Существуют две схемы управления: схема «+» и схема «х».
В схеме «+»один из роторов является передним, противоположный ему – задним, и два ротора являются боковыми. В схеме «х» передними являются одновременно два ротора, два других являются задними, а смещения в боковом направлении также реализуются одновременно парой соответствующих роторов.
Мультикоптеры:
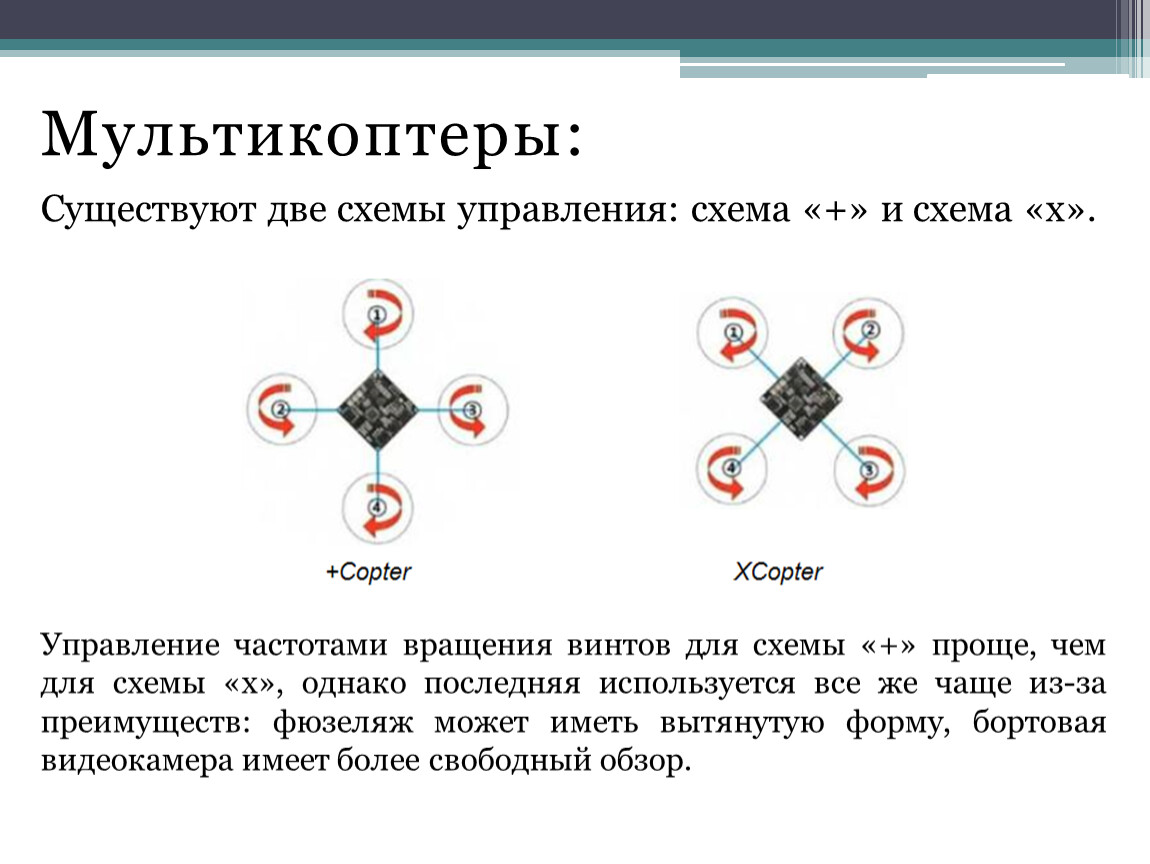
Существуют две схемы управления: схема «+» и схема «х».
Управление частотами вращения винтов для схемы «+» проще, чем для схемы «х», однако последняя используется все же чаще из-за преимуществ: фюзеляж может иметь вытянутую форму, бортовая видеокамера имеет более свободный обзор.
Мультикоптеры:
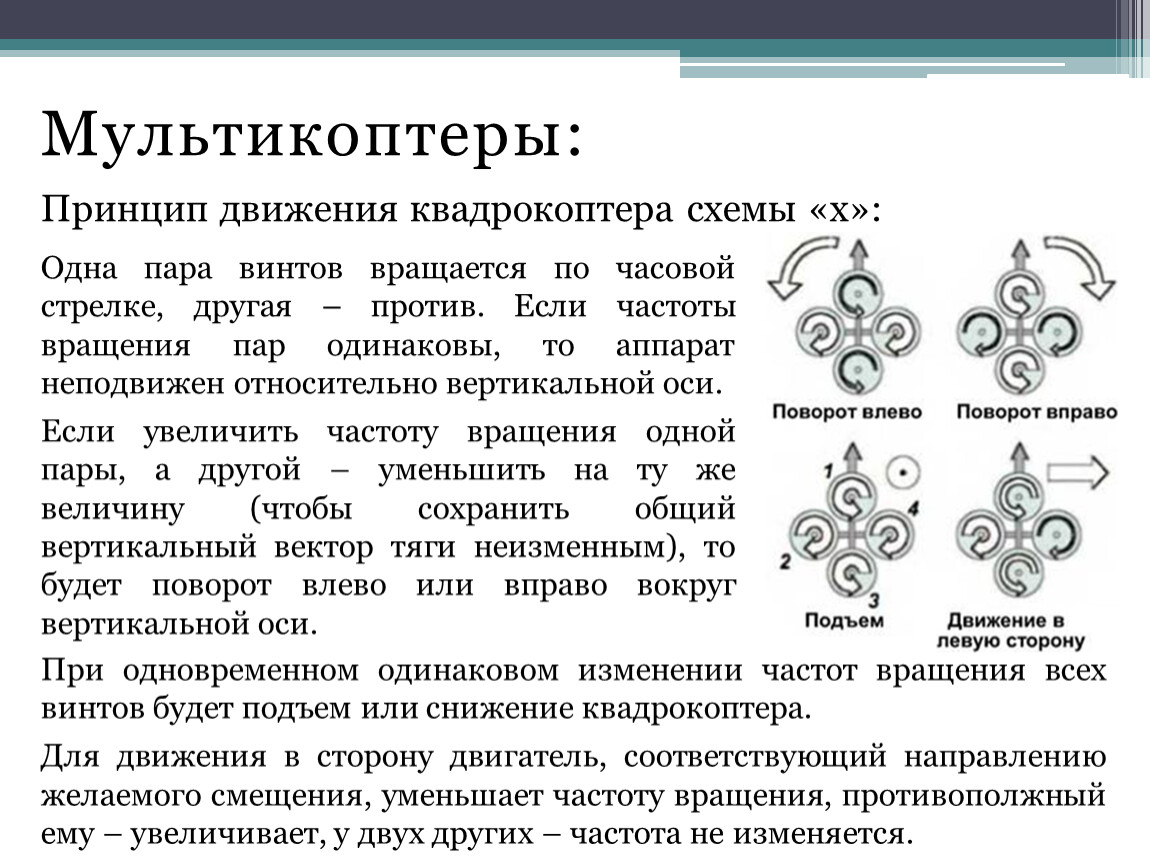
Принцип движения квадрокоптера схемы «х»:
Одна пара винтов вращается по часовой стрелке, другая – против. Если частоты вращения пар одинаковы, то аппарат неподвижен относительно вертикальной оси.
Если увеличить частоту вращения одной пары, а другой – уменьшить на ту же величину (чтобы сохранить общий вертикальный вектор тяги неизменным), то будет поворот влево или вправо вокруг вертикальной оси.
При одновременном одинаковом изменении частот вращения всех винтов будет подъем или снижение квадрокоптера.
Для движения в сторону двигатель, соответствующий направлению желаемого смещения, уменьшает частоту вращения, противополжный ему – увеличивает, у двух других – частота не изменяется.

Мультикоптеры:
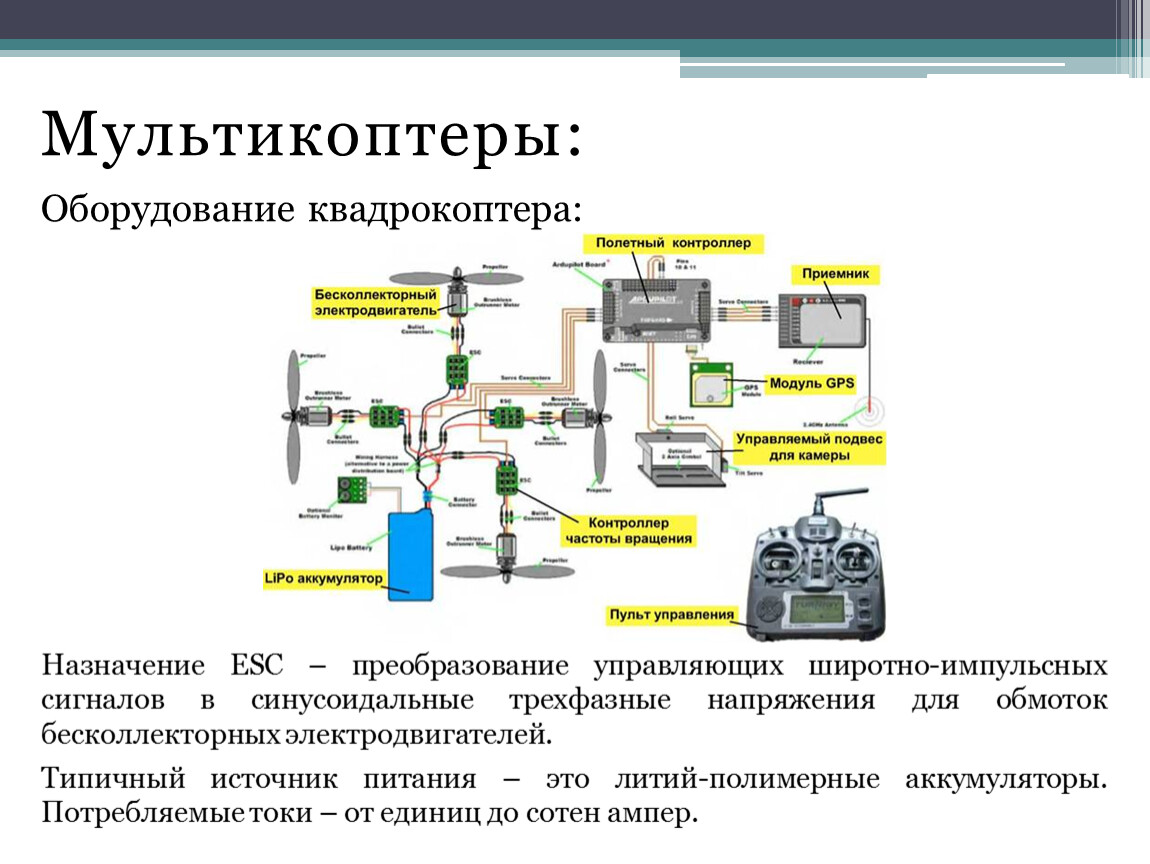
Оборудование квадрокоптера:
Команды, принятые приемником, поступают в полетный контроллер в виде широтно-импульсного сигнала. Здесь они с учетом текущей навигационной информации (получаемой от встроенных гироскопов и акселерометров), а также с учетом сигналов с модуля GPS (опционально) преобразуются в широтно-импульсные сигналы управления двигателями, которые подаются на контроллеры частоты вращения двигателей (ESC – Engine Speed Control).
Мультикоптеры:
Оборудование квадрокоптера:
Назначение ESC – преобразование управляющих широтно-импульсных сигналов в синусоидальные трехфазные напряжения для обмоток бесколлекторных электродвигателей.
Типичный источник питания – это литий-полимерные аккумуляторы. Потребляемые токи – от единиц до сотен ампер.

Мультикоптеры:
Основное назначение мультикоптеров – это фото- и видеосъемка, поэтому их обычно оснащают управляемыми подвесами для камер.
Компоновка оборудования может быть самой различной. Модуль GPS обычно выносят отдельно как можно дальше от сильноточных цепей. Для защиты пропеллеров предусматривают специальные ограждения.
Для увеличения подъемной силы и повышения живучести часто объединяют на одной балке тянущий и толкающий винты.
Квадрокоптер с защитой пропеллеров (вверху – GPS-модуль)
Квадрокоптер схемы «х» с совмещенными тянущими и толкающими винтами

Мультикоптеры:
Гексакоптеры и октокоптеры имеют соответственно по 6 и 8 роторов, обладают большей грузоподъемностью по сравнению с квадрокоптерами. Способны устойчиво лететь при выходе из строя одного ротора. Отличаются гораздо меньшим уровнем вибраций, что особенно важно для видеосъемки.
Гексакоптер
Октокоптер
С машущим крылом:
Копируют движения, создаваемые в полете птицами и насекомыми. В этом классе БПЛА пока нет серийно выпускаемых аппаратов, но во всем мире проводятся интенсивные исследования в этой области. Появилось большое количество разных интересных концептов малых БПЛА с машущим крылом.
Главные преимущества, которые имеют птицы и летающие насекомые перед существующими ЛА – это энергоэффективность и маневренность. Если разработчики «машущих» БПЛА смогут по этим показателям приблизиться к живой природе, то этот класс аппаратов начнет находить свое применение.
ЛА, основанные на имитации движений птиц, называют орнитоптеры (англ. ornithopter), а ЛА, в которых копируются движения летающих насекомых – энтомоптеры (англ. entomopter).
С машущим крылом:
Орнитоптеры:
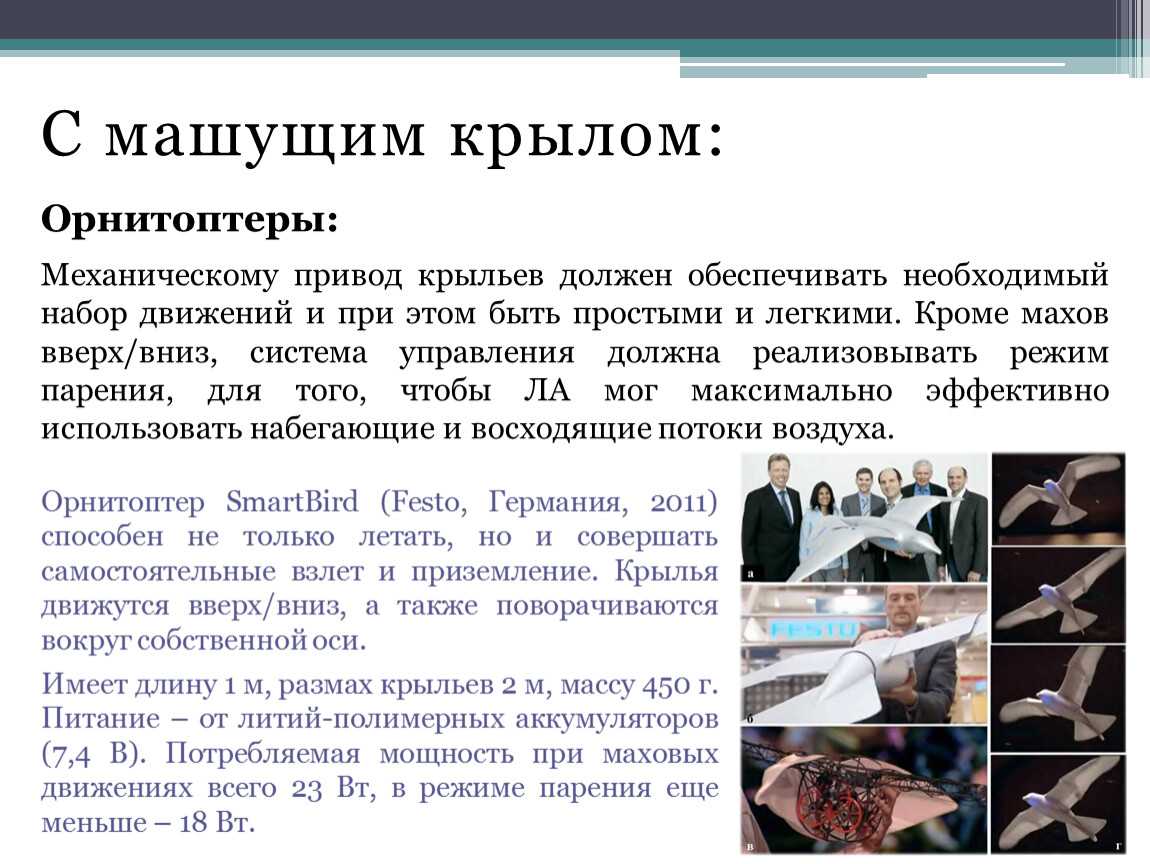
Механическому привод крыльев должен обеспечивать необходимый набор движений и при этом быть простыми и легкими. Кроме махов вверх/вниз, система управления должна реализовывать режим парения, для того, чтобы ЛА мог максимально эффективно использовать набегающие и восходящие потоки воздуха.
Орнитоптер SmartBird (Festo, Германия, 2011) способен не только летать, но и совершать самостоятельные взлет и приземление. Крылья движутся вверх/вниз, а также поворачиваются вокруг собственной оси.
Имеет длину 1 м, размах крыльев 2 м, массу 450 г. Питание – от литий-полимерных аккумуляторов (7,4 В). Потребляемая мощность при маховых движениях всего 23 Вт, в режиме парения еще меньше – 18 Вт.
С машущим крылом:
Энтомоптеры:
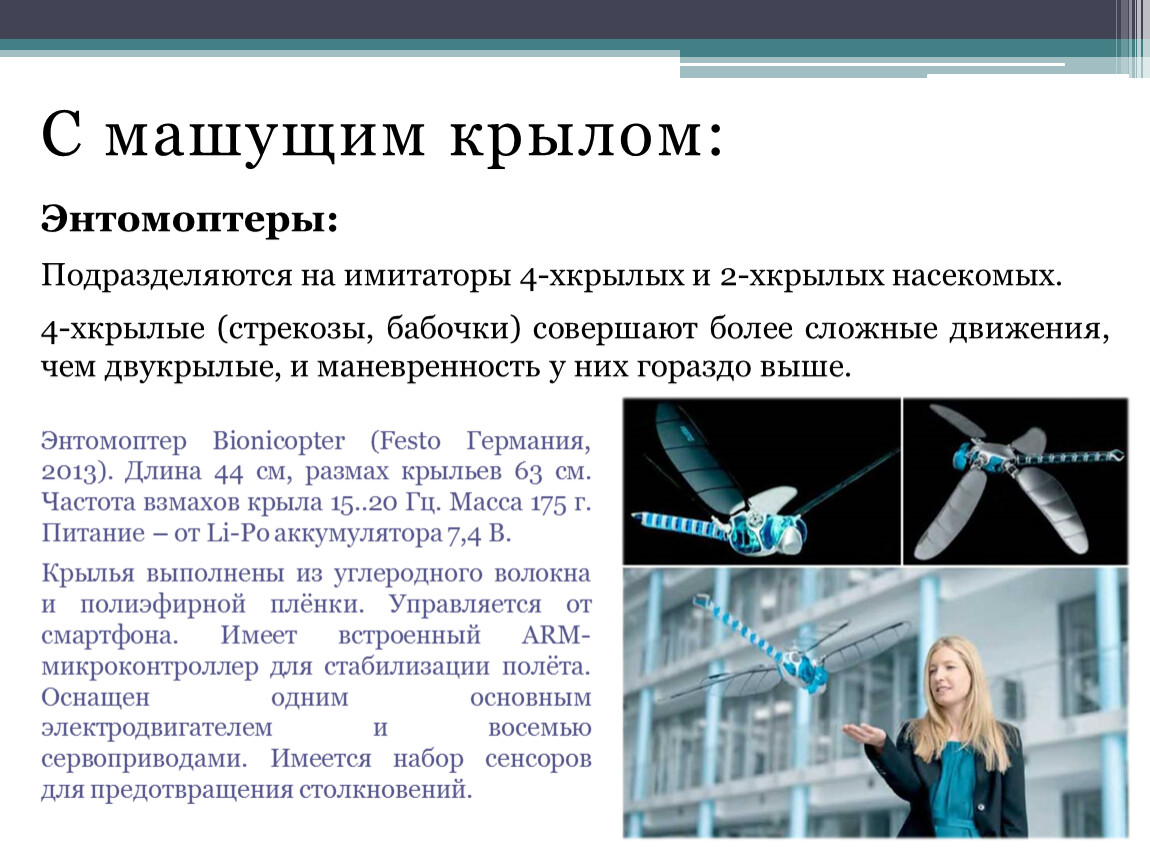
Подразделяются на имитаторы 4-хкрылых и 2-хкрылых насекомых.
4-хкрылые (стрекозы, бабочки) совершают более сложные движения, чем двукрылые, и маневренность у них гораздо выше.
Энтомоптер Вionicopter (Festo Германия, 2013). Длина 44 см, размах крыльев 63 см. Частота взмахов крыла 15..20 Гц. Масса 175 г. Питание – от Li-Po аккумулятора 7,4 В.
Крылья выполнены из углеродного волокна и полиэфирной плёнки. Управляется от смартфона. Имеет встроенный ARM-микроконтроллер для стабилизации полёта. Оснащен одним основным электродвигателем и восемью сервоприводами. Имеется набор сенсоров для предотвращения столкновений.

С машущим крылом:
Энтомоптеры:
Каждое крыло BionicOpter, кроме маховых движений, может совершать вращательные движения вокруг своей оси и угловые перемещения в горизонтальной плоскости. Кроме того, хвостовая часть может изгибаться, меняя положение центра тяжести.
Аппарат очень маневренный, может мгновенно зависать на месте и перемещаться в любую сторону, не изменяя угла тангажа.
С машущим крылом:
Энтомоптеры:
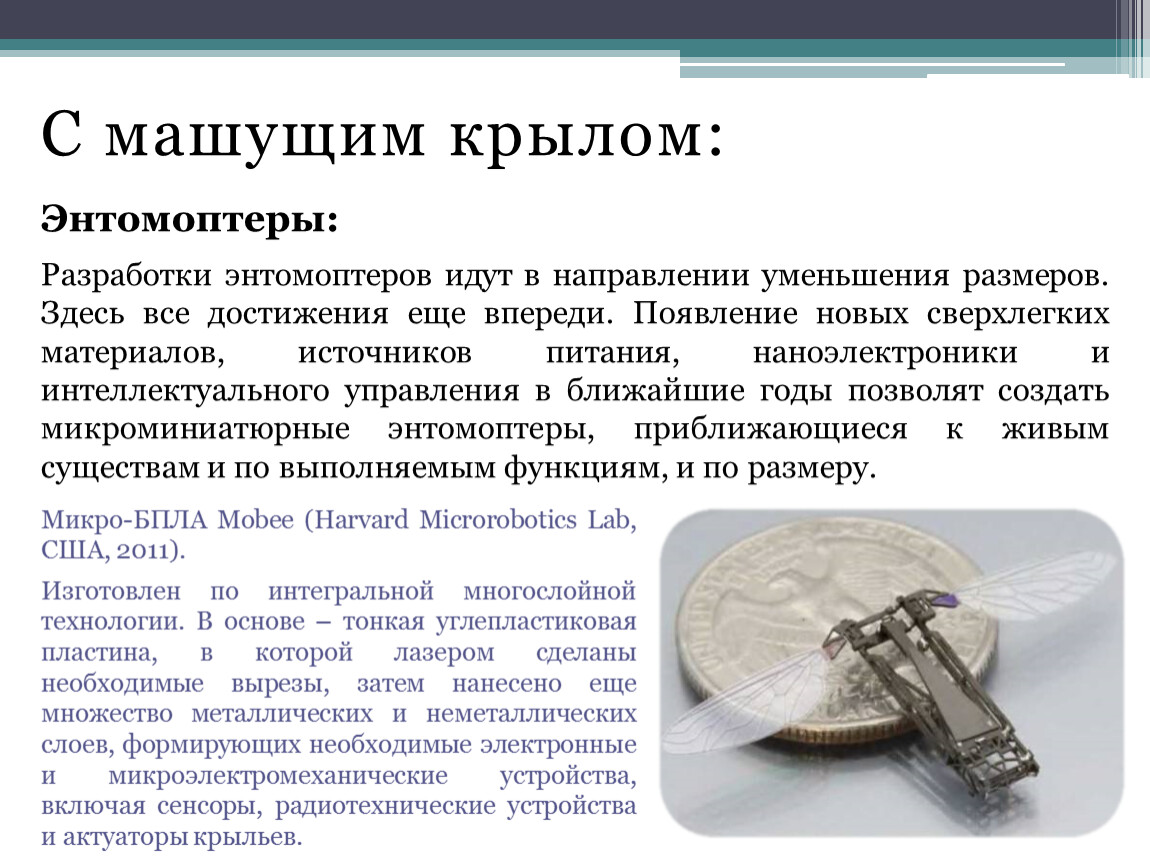
Разработки энтомоптеров идут в направлении уменьшения размеров. Здесь все достижения еще впереди. Появление новых сверхлегких материалов, источников питания, наноэлектроники и интеллектуального управления в ближайшие годы позволят создать микроминиатюрные энтомоптеры, приближающиеся к живым существам и по выполняемым функциям, и по размеру.
Микро-БПЛА Mobee (Harvard Microrobotics Lab, США, 2011).
Изготовлен по интегральной многослойной технологии. В основе – тонкая углепластиковая пластина, в которой лазером сделаны необходимые вырезы, затем нанесено еще множество металлических и неметаллических слоев, формирующих необходимые электронные и микроэлектромеханические устройства, включая сенсоры, радиотехнические устройства и актуаторы крыльев.
Аэростатические:
Подъемная сила равна архимедовой силе, действующей на баллон, заполненный легким газом (гелием).
Этот класс представлен беспилотными дирижаблями.
Дирижабль – это ЛА легче воздуха, комбинация аэростата с движителем (винтом с электродвигателем или ДВС) и системы управления ориентацией.
По конструкции дирижабли бывают:
мягкие;
полужёсткие;
жёсткие.
Аэростатические:
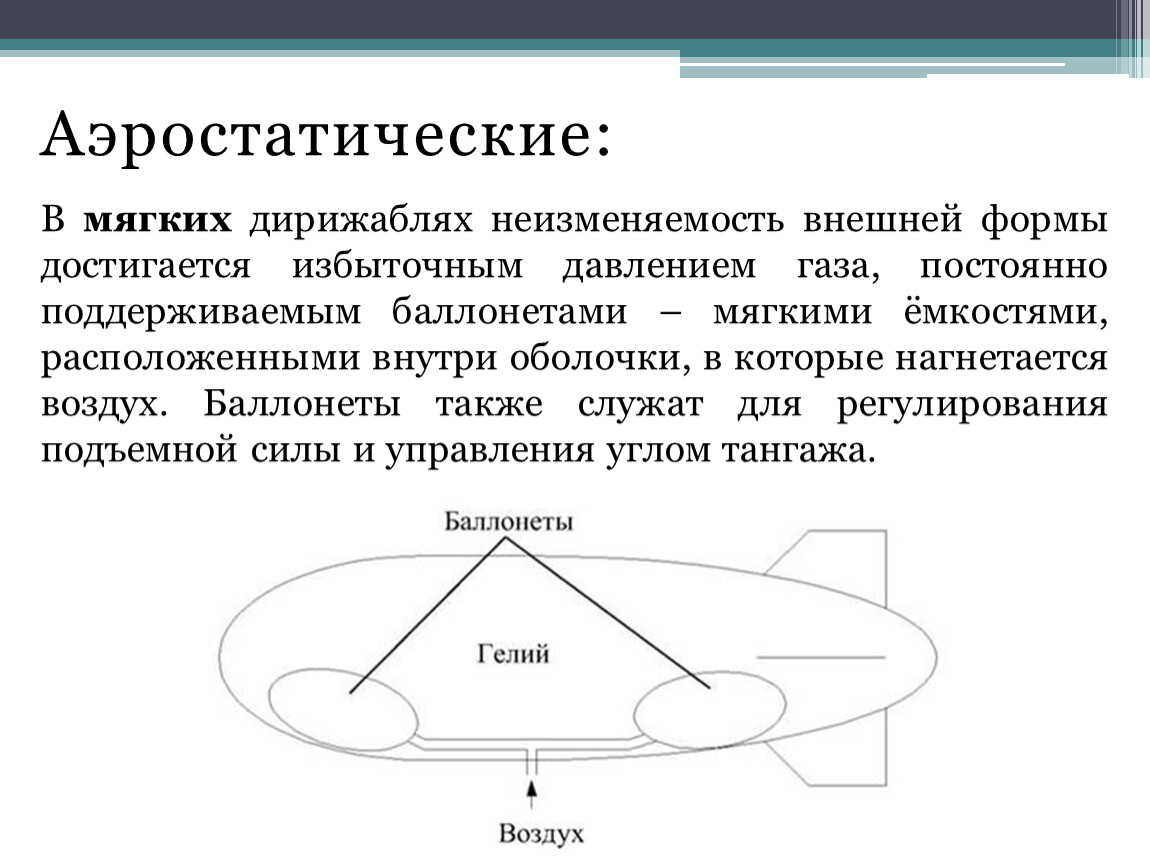
В мягких дирижаблях неизменяемость внешней формы достигается избыточным давлением газа, постоянно поддерживаемым баллонетами – мягкими ёмкостями, расположенными внутри оболочки, в которые нагнетается воздух. Баллонеты также служат для регулирования подъемной силы и управления углом тангажа.
Аэростатические:
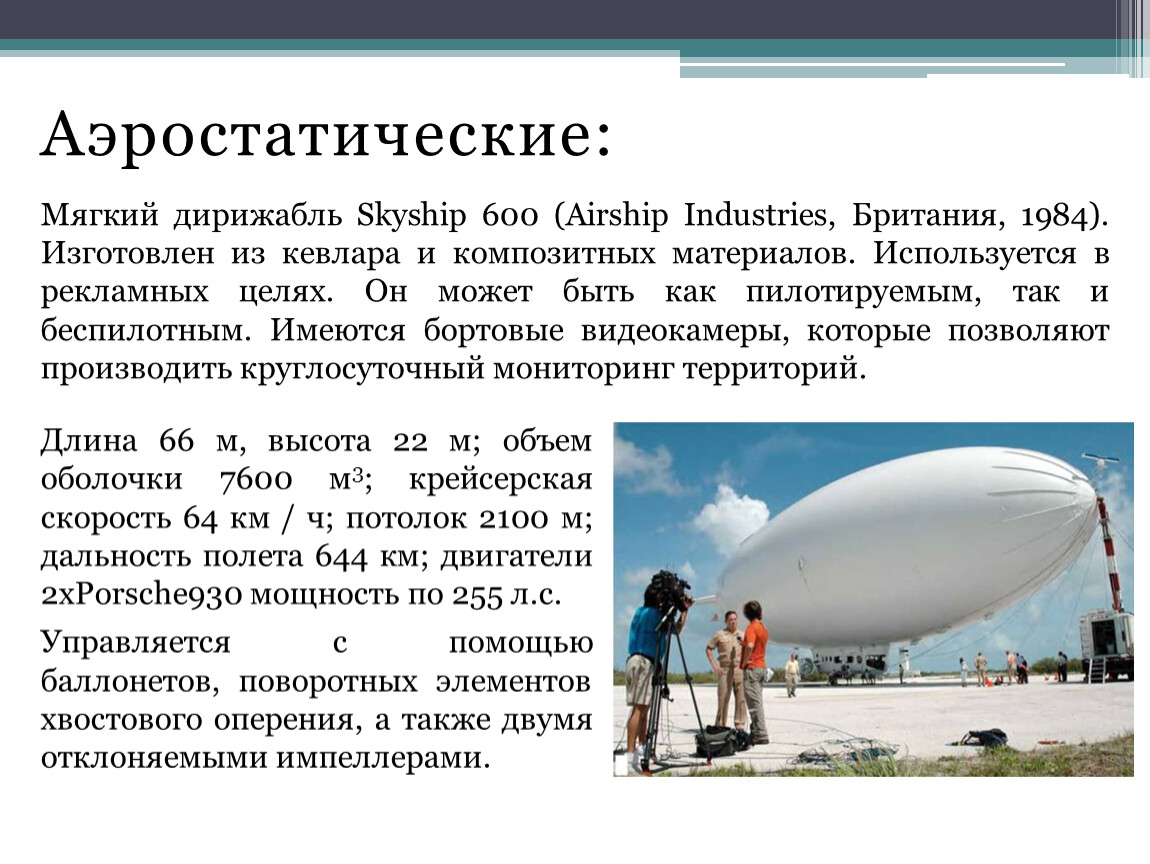
Мягкий дирижабль Skyship 600 (Airship Industries, Британия, 1984). Изготовлен из кевлара и композитных материалов. Используется в рекламных целях. Он может быть как пилотируемым, так и беспилотным. Имеются бортовые видеокамеры, которые позволяют производить круглосуточный мониторинг территорий.
Длина 66 м, высота 22 м; объем оболочки 7600 м3; крейсерская скорость 64 км / ч; потолок 2100 м; дальность полета 644 км; двигатели 2хPorsche930 мощность по 255 л.с.
Управляется с помощью баллонетов, поворотных элементов хвостового оперения, а также двумя отклоняемыми импеллерами.
Аэростатические:
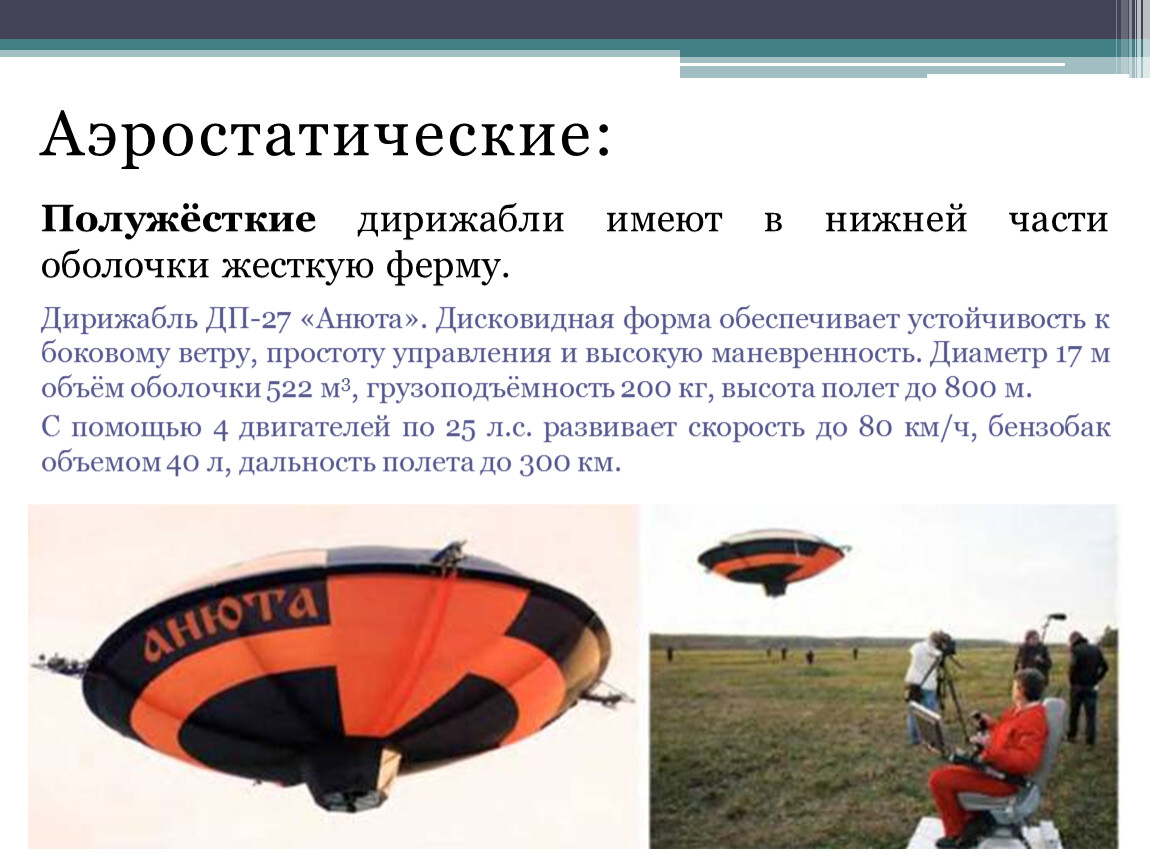
Полужёсткие дирижабли имеют в нижней части оболочки жесткую ферму.
Дирижабль ДП-27 «Анюта». Дисковидная форма обеспечивает устойчивость к боковому ветру, простоту управления и высокую маневренность. Диаметр 17 м объём оболочки 522 м3, грузоподъёмность 200 кг, высота полет до 800 м.
С помощью 4 двигателей по 25 л.с. развивает скорость до 80 км/ч, бензобак объемом 40 л, дальность полета до 300 км.
Аэростатические:
В жёстких дирижаблях неизменяемость внешней формы обеспечивается жестким каркасом, обтянутым тканью, а газ находится внутри жёсткого каркаса в баллонах из газонепроницаемой материи.
Беспилотные жесткие дирижабли пока практически не применяются.
Гибридные:
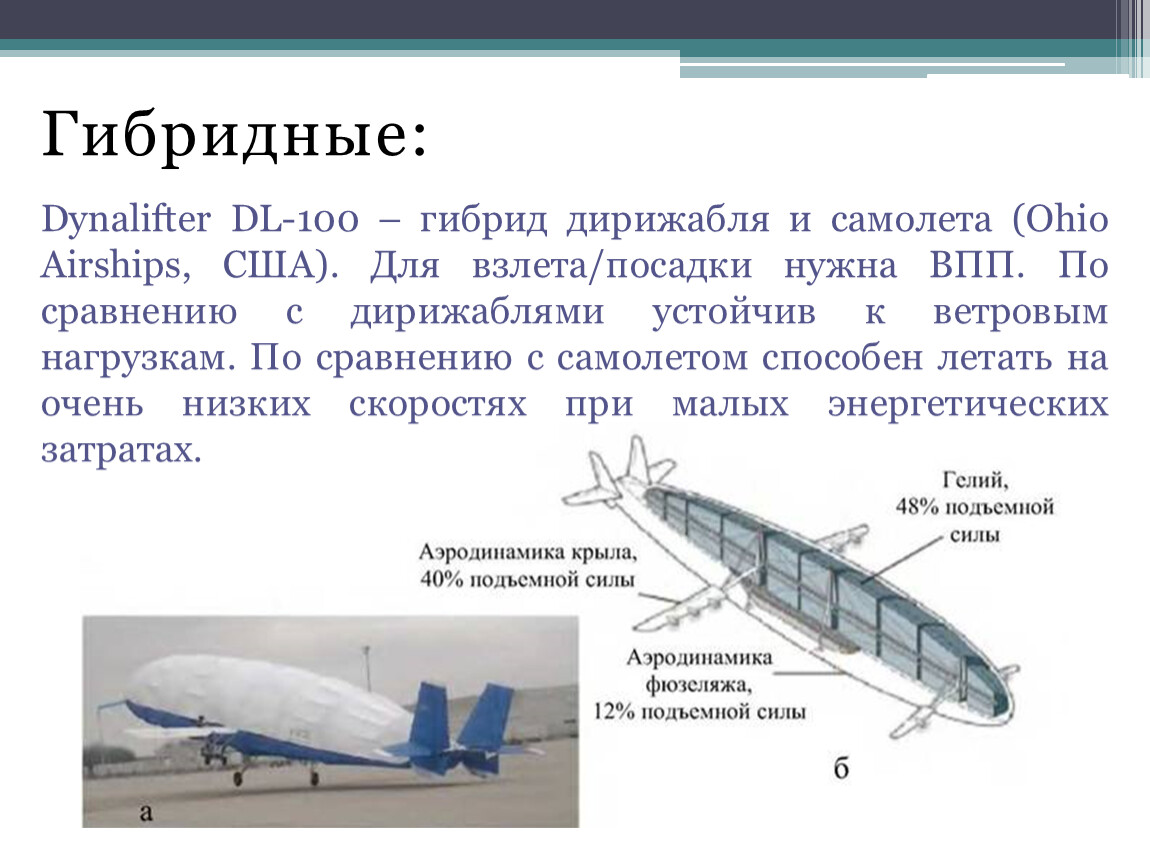
Dynalifter DL-100 – гибрид дирижабля и самолета (Ohio Airships, США). Для взлета/посадки нужна ВПП. По сравнению с дирижаблями устойчив к ветровым нагрузкам. По сравнению с самолетом способен летать на очень низких скоростях при малых энергетических затратах.
Гибридные:
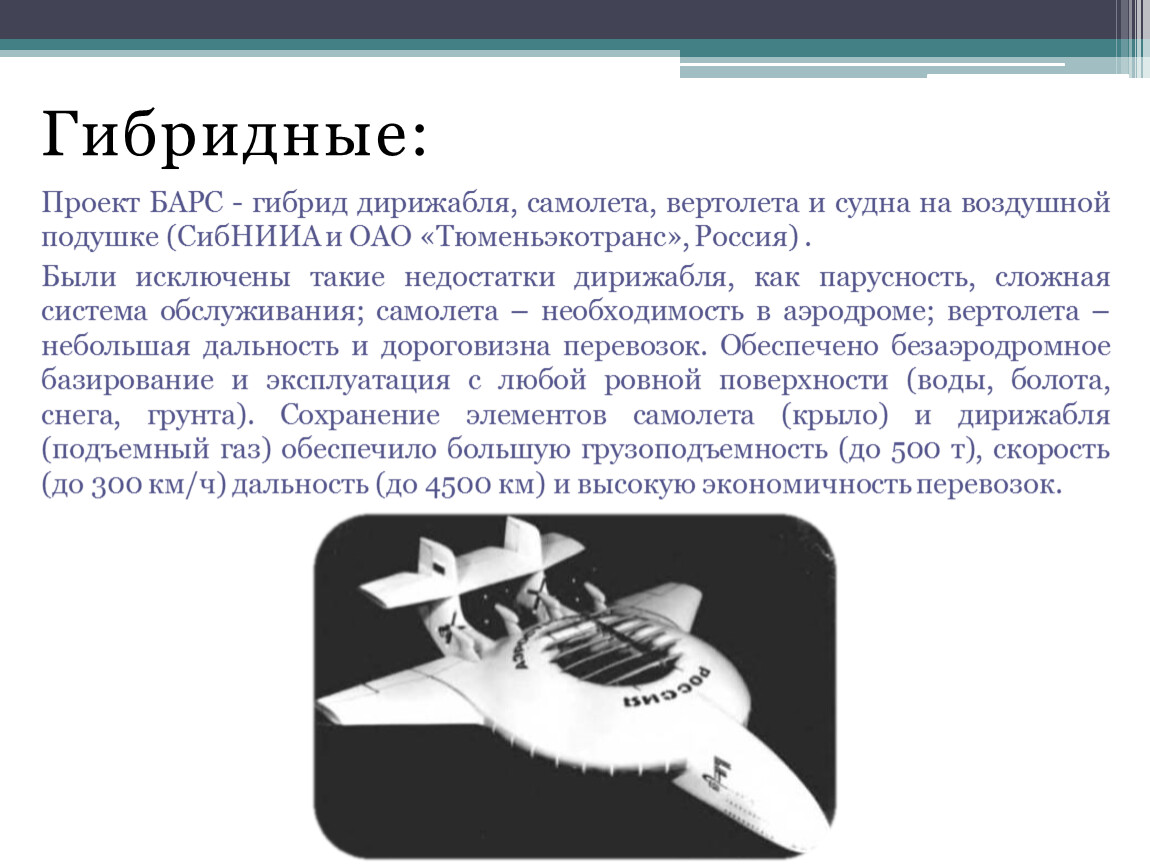
Проект БАРС - гибрид дирижабля, самолета, вертолета и судна на воздушной подушке (СибНИИА и ОАО «Тюменьэкотранс», Россия) .
Были исключены такие недостатки дирижабля, как парусность, сложная система обслуживания; самолета – необходимость в аэродроме; вертолета – небольшая дальность и дороговизна перевозок. Обеспечено безаэродромное базирование и эксплуатация с любой ровной поверхности (воды, болота, снега, грунта). Сохранение элементов самолета (крыло) и дирижабля (подъемный газ) обеспечило большую грузоподъемность (до 500 т), скорость (до 300 км/ч) дальность (до 4500 км) и высокую экономичность перевозок.
Гибридные:
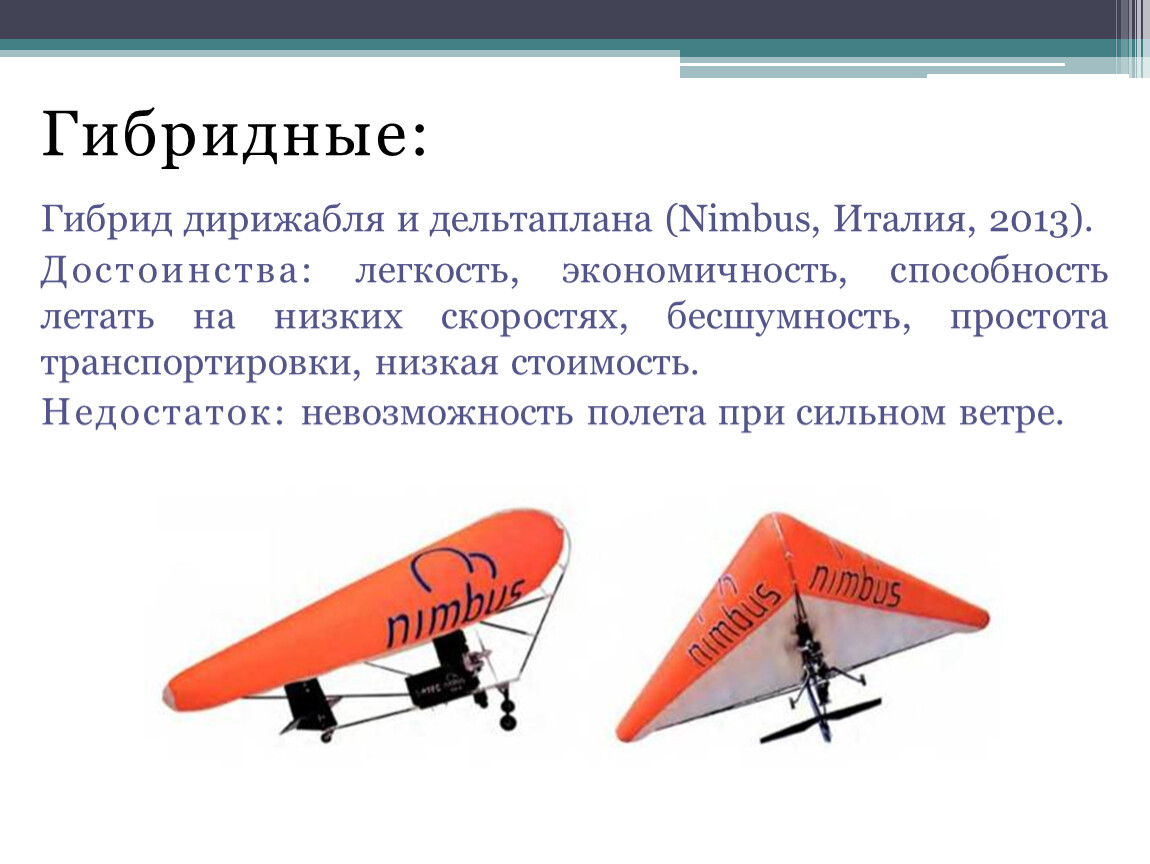
Гибрид дирижабля и дельтаплана (Nimbus, Италия, 2013).
Достоинства: легкость, экономичность, способность летать на низких скоростях, бесшумность, простота транспортировки, низкая стоимость.
Недостаток: невозможность полета при сильном ветре.
Гибридные:
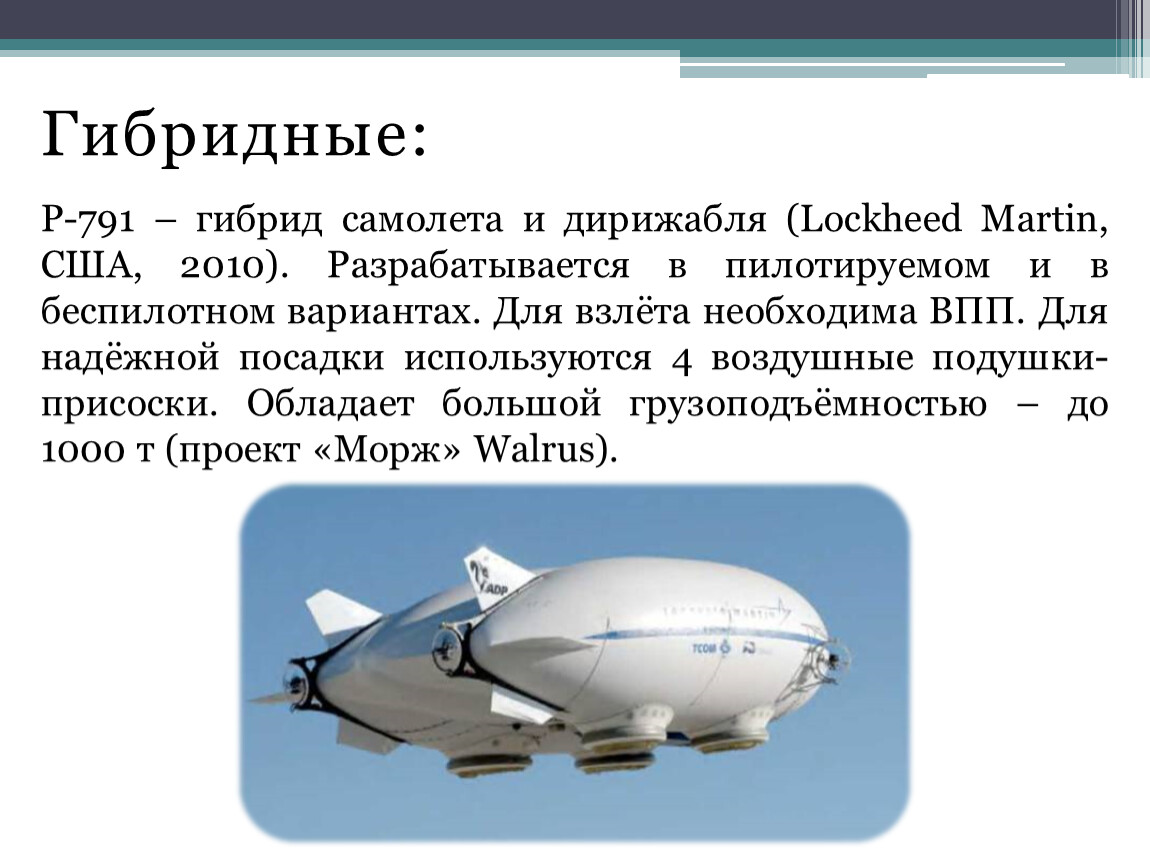
Р-791 – гибрид самолета и дирижабля (Lockheed Martin, США, 2010). Разрабатывается в пилотируемом и в беспилотном вариантах. Для взлёта необходима ВПП. Для надёжной посадки используются 4 воздушные подушки-присоски. Обладает большой грузоподъёмностью – до 1000 т (проект «Морж» Walrus).
Области применения
Научные:
Используются для получения новых знаний, причем не имеет значения то, из какой области эти знания и где они потом будут применены. Это могут быть испытания новой техники или наблюдения за природными явлениями.
Прикладные:
Военные:
наблюдательные
разведывательные
ударные
разведывательно-ударные
бомбардировочные
истребительные (для уничтожения воздушных целей)
радиотрансляционные
РЭБ
транспортные
БПЛА-мишени
многоцелевые
Прикладные:
Гражданские – разделены на 5 групп:
Мониторинг и подобные задачи:
видеонаблюдение с целью охраны различных объектов;
мониторинг лесных массивов службой лесоохраны;
патрулирование заданных зон полицией;
наблюдение за движением на железных и шоссейных дорогах, контроль судоходства;
наблюдение за посевами фермерами и предприятиями с/х;
контроль рыбного промысла;
картографирование земной поверхности;
разведка и составление планов помещений внутри опасных зданий;
поиск полезных ископаемых;
мониторинг нефтегазовых объектов, особенно трубопроводов;
инспектирование строек;
видео- и фотосъемка труднодоступных промышленных объектов;
радиационная и химическая разведка на опасных территориях;
метеорологические наблюдения;
экологический мониторинг атмосферы и поверхности водоемов;
мониторинг опасных природных явлений (извержений вулканов, лавин и т.п.);
оценка результатов стихийных бедствий и ликвидации их последствий;
наблюдение за дикими животными в заповедниках.
Прикладные:
Презентации, реклама, развлечения, творчество:
видео- и фотосъемка объектов архитектуры, природы, бизнеса, а также массовых мероприятий с целью презентации или рекламы;
использование БПЛА в качестве носителей рекламы;
использование малых БПЛА в учебных целях в школах и вузах;
авиамоделизм и авиаконструирование для многочисленных любителей;
использование БПЛА в качестве арт-объекта или объекта развлечения
Прикладные:
Доставка грузов и подобные задачи:
доставка почты;
доставка инструмента, комплектующих и материалов на строительные объекты;
монтаж различных конструкций;
выполнение или обеспечение ремонтных работ на труднодоступных объектах;
распыление химикатов и внесение удобрений на полях;
прокладка кабеля в опасных зонах;
доставка продуктов, горючего, запчастей, источников питания и т.д. в труднодоступные районы для обеспечения альпинистов, туристов, экспедиций;
сброс маркеров (световых, радиоизлучающих) для обозначения каких-либо объектов;
доставка медикаментов и медоборудования в зоны аварий и катастроф;
эвакуация пострадавших из зоны бедствия;
эвакуация дорогостоящих материальных ценностей из опасных зон;
доставка спасательных средств терпящим бедствие на воде;
сброс взрывных устройств в горах для организации превентивного схода лавин;
дозаправка или подзарядка автономно работающих труднодоступных устройств (буев, маяков, метеостанций, ретрансляционных станций и так далее).
Прикладные:
Ретрансляция сигналов и подобные задачи:
ретрансляция радиосигналов с целью увеличения дальности действия каналов связи;
использование БПЛА в качестве носителей осветительного оборудования;
установка на борту громкоговорителей для воспроизведения команд, музыки и т.п.;
использование БПЛА для генерации или отражения лазерного луча.
Управление поведением живых объектов:
использование БПЛА в качестве «пастуха» – управление передвижением табунов лошадей, отар овец и т.д.;
отпугивание стай птиц от аэродромов.
Фильмы к просмотру:
Дроны. Нашествие беспилотников
Дроны. Революция в небе
15 самых крутых дронов
10 самых маленьких дронов в мире
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.