Презентация по физике "Механические колебания" 11 класс предназначена для изучения темы "Колебания" в 11 классе, в презентации подробно описаны законы механических колебаний, а также рассмотрен закон сохранения энергии при колебательных процессах для математического и пружинного маятников, хорошие схемы, рисунки. Показаны формулы
МЕХАНИЧЕСКИЕ
МЕХАНИЧЕСКИЕ
КОЛЕБАНИЯ
КОЛЕБАНИЯ
Колебания
Колебания
В технике и окружающем нас мире часто
приходится сталкиваться с периодическими
или почти периодическими процессами
восход и заход Солнца, волнения на море,
(восход и заход Солнца, волнения на море,
колебания маятника часов, переменный
колебания маятника часов, переменный
электрический ток, электромагнитные
электрический ток, электромагнитные
волны), которые повторяются через
волны)
одинаковые промежутки времени. Такие
процессы называют колебательными.
Признаки колебания
Признаки колебания
Колебательные явления обладают общими
Колебательные явления обладают общими
чертами и даже подчиняются одинаковым
чертами и даже подчиняются одинаковым
закономерностям, несмотря на то, что они
закономерностям, несмотря на то, что они
могут иметь совершенно разную физическую
могут иметь совершенно разную физическую
природу. Характерная черта колебательных
природу. Характерная черта колебательных
движений, отличающая их от других
движений, отличающая их от других
явлений, состоит в том, что они
явлений, состоит в том, что они
многократно повторяются или
многократно повторяются или
приблизительно повторяются через
приблизительно повторяются через
определенные промежутки времени.
определенные промежутки времени.
Механические колебания
Механические колебания
Механическими колебаниями называют
движения тел, повторяющиеся точно (или
приблизительно) через одинаковые
промежутки времени.
Закон движения тела, совершающего
колебания, задается с помощью некоторой
периодической функции времени x = f(t).
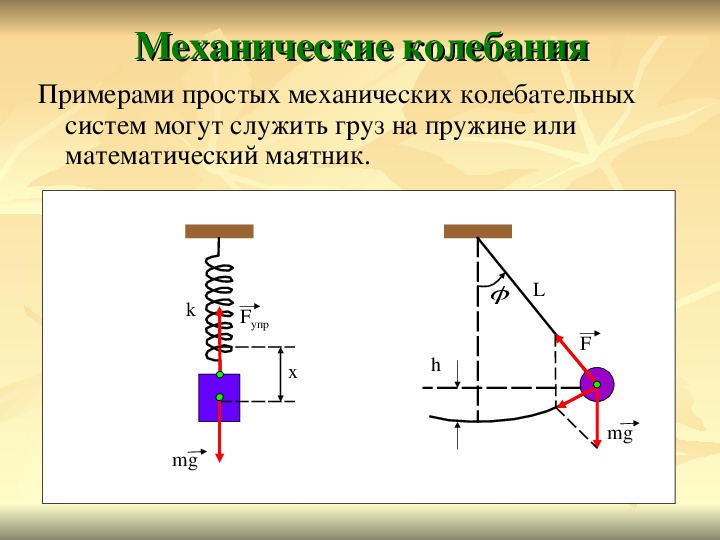
Механические колебания
Механические колебания
Примерами простых механических колебательных
систем могут служить груз на пружине или
математический маятник.
k
Fупр
mg
x
h
L
F
mg
Свободные и вынужденные
Свободные и вынужденные
колебания
колебания
Механические колебания могут быть свободными и
вынужденными. Свободные колебания
совершаются под действием внутренних сил
системы, после того, как система была выведена из
состояния равновесия. Колебания груза на
пружине или колебания маятника являются
свободными колебаниями. Колебания,
происходящие под действием внешних
периодически изменяющихся сил, называются
вынужденными.
Свободные колебания
Свободные колебания
колебания груза на пружине
колебания маятника
Собственные колебания
Собственные колебания
Пусть на пружине жесткостью kk подвешен
подвешен
Пусть на пружине жесткостью
груз mm. Рассмотрим вертикальное движение
. Рассмотрим вертикальное движение
груз
груза, которое будет происходить под
груза, которое будет происходить под
действием силы упругости пружины и силы
действием силы упругости пружины и силы
тяжести, если вывести систему из
тяжести, если вывести систему из
состояния равновесия и предоставить самой
состояния равновесия и предоставить самой
себе.
себе.
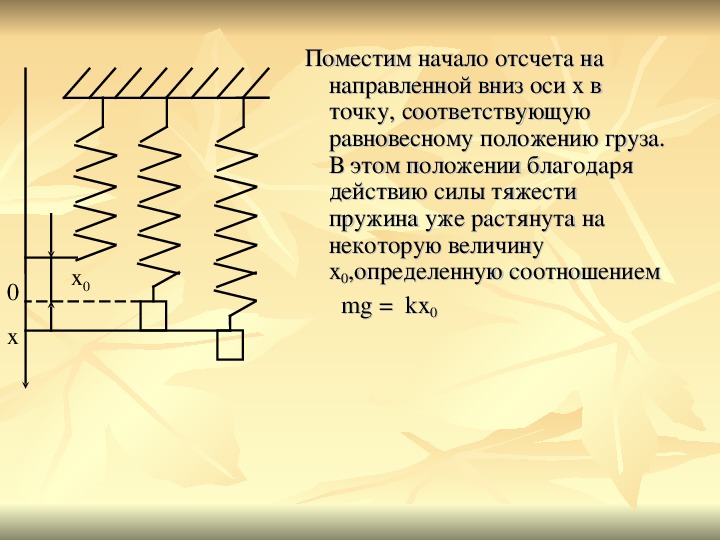
Поместим начало отсчета на
Поместим начало отсчета на
направленной вниз оси xx в
в
направленной вниз оси
точку, соответствующую
точку, соответствующую
равновесному положению груза.
равновесному положению груза.
В этом положении благодаря
В этом положении благодаря
действию силы тяжести
действию силы тяжести
пружина уже растянута на
пружина уже растянута на
некоторую величину
некоторую величину
xx00,определенную соотношением
,определенную соотношением
mg mg == kxkx00
x0
0
x
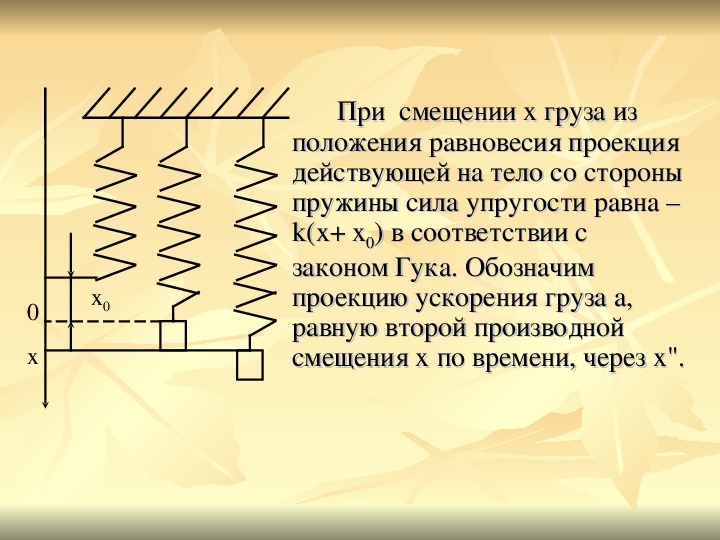
При смещении x x груза из
груза из
При смещении
положения равновесия проекция
положения равновесия проекция
действующей на тело со стороны
действующей на тело со стороны
пружины сила упругости равна –
пружины сила упругости равна –
kk((xx+ + xx00) в соответствии с
) в соответствии с
законом Гука. Обозначим
законом Гука. Обозначим
проекцию ускорения груза aa, ,
проекцию ускорения груза
равную второй производной
равную второй производной
смещения x x по времени, через
смещения
по времени, через xx". ".
x0
0
x
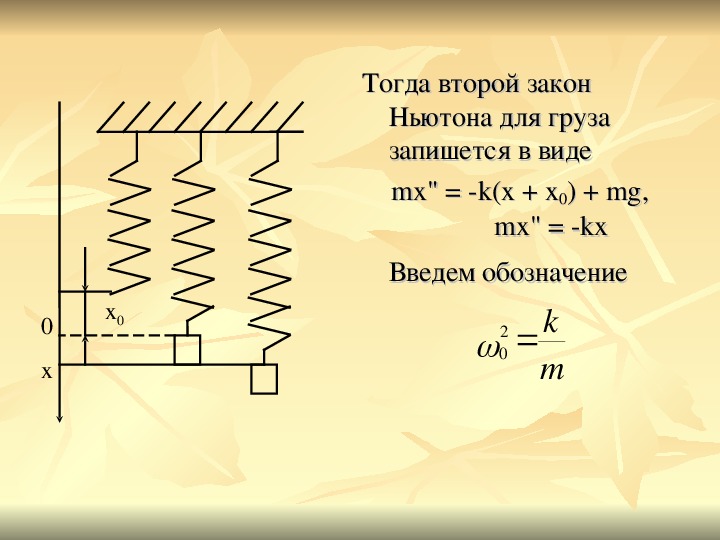
Тогда второй закон
Тогда второй закон
) + mgmg,
,
Ньютона для груза
Ньютона для груза
запишется в виде
запишется в виде
+ xx00) +
mxmx" =
" = kxkx
mxmx" =
" = kk((xx +
x0
0
x
Введем обозначение
Введем обозначение
k2
m
0
Теперь уравнение движения
принимает окончательный вид:
mx" + x=0
0
2
x0
0
x
К точно такому же уравнению мы придем,
К точно такому же уравнению мы придем,
рассматривая малые колебания около
рассматривая малые колебания около
положения равновесия самых разных физических систем
положения равновесия самых разных физических систем
Математический маятник
Математический маятник
Математический
Математический
маятник –
маятник –
материальная точка,
материальная точка,
подвешенная на
подвешенная на
нерастяжимой
нерастяжимой
невесомой нити.
невесомой нити.
Физический маятник
Физический маятник
Физический маятник –
Физический маятник –
любое твердое тело,
любое твердое тело,
которое может
которое может
поворачиваться вокруг
поворачиваться вокруг
горизонтальной оси
горизонтальной оси
под действием силы
под действием силы
тяжести.
тяжести.
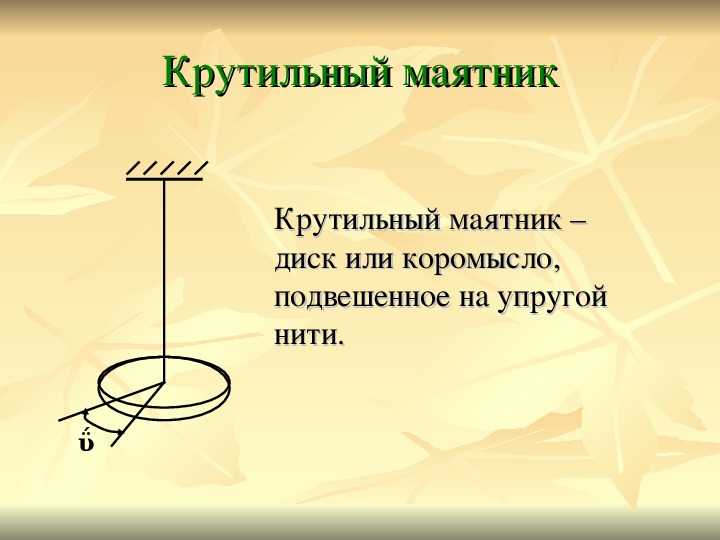
Крутильный маятник
Крутильный маятник
Крутильный маятник –
Крутильный маятник –
диск или коромысло,
диск или коромысло,
подвешенное на упругой
подвешенное на упругой
нити.
нити.
ΰ
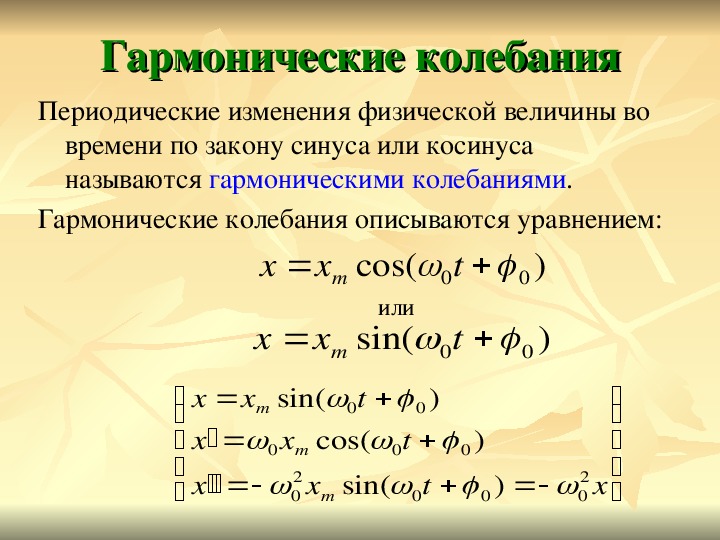
Гармонические колебания
Гармонические колебания
Периодические изменения физической величины во
времени по закону синуса или косинуса
называются гармоническими колебаниями.
Гармонические колебания описываются уравнением:
)
0
)
0
m
x
t
t
x
x
0
cos(
или
0
x
sin(
m
x
t
sin(
)
0
0
m
cos(
x
)
t
0
m
0
0
2
x
t
0
0
sin(
m
0
)
x
x
x
2
0
x
x
x
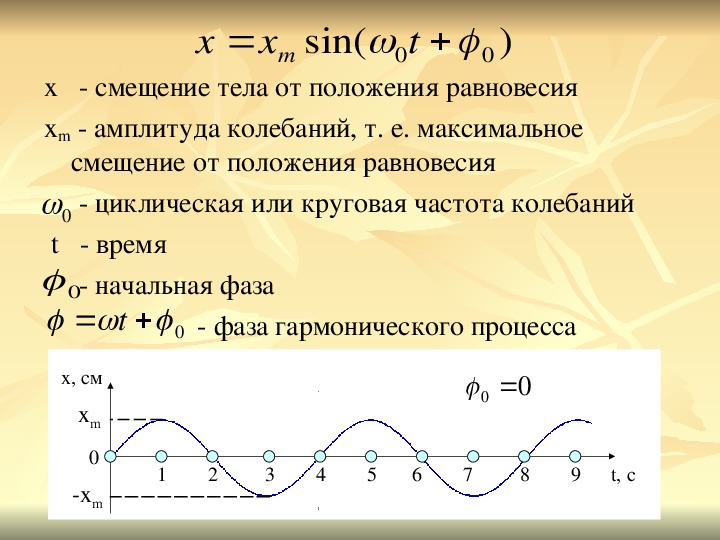
m
sin(
0
t
0
)
x смещение тела от положения равновесия
xm амплитуда колебаний, т. е. максимальное
смещение от положения равновесия
t
0
циклическая или круговая частота колебаний
t время
0
начальная фаза
0
фаза гармонического процесса
x, см
xm
0
xm
0
0
t, с
1
5
6
3
4
2
7
8
9
Период и частота гармонических
Период и частота гармонических
колебаний
колебаний
Минимальный промежуток времени Т, через который
движение тела полностью повторяется, называют периодом
колебаний.
Физическая величина, обратная периоду колебаний,
называется частотой колебаний.
1
Т
Частота колебаний показывает, сколько колебаний
совершается в единицу времени.
Частота колебаний связана с циклической частотой
периодом колебаний T соотношениями:
и ω
0
2
2
Т
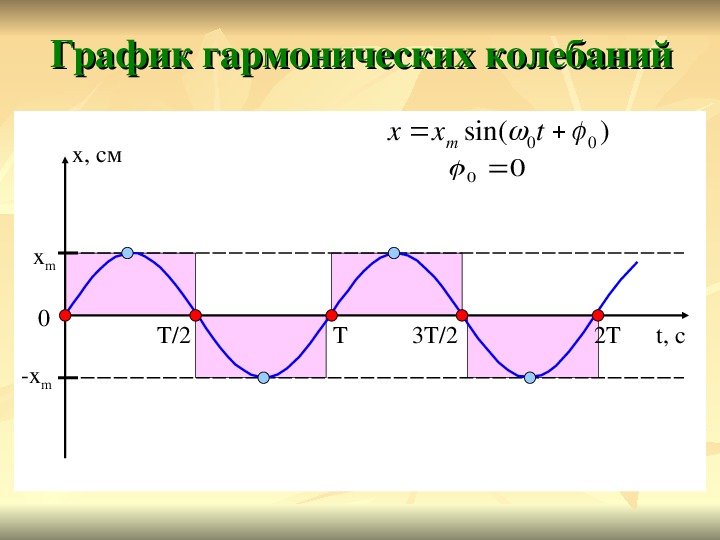
График гармонических колебаний
График гармонических колебаний
x, см
x
x
t
0
sin(
m
0
0
0
)
xm
0
xm
Т/2
Т
3Т/2
2Т
t, с
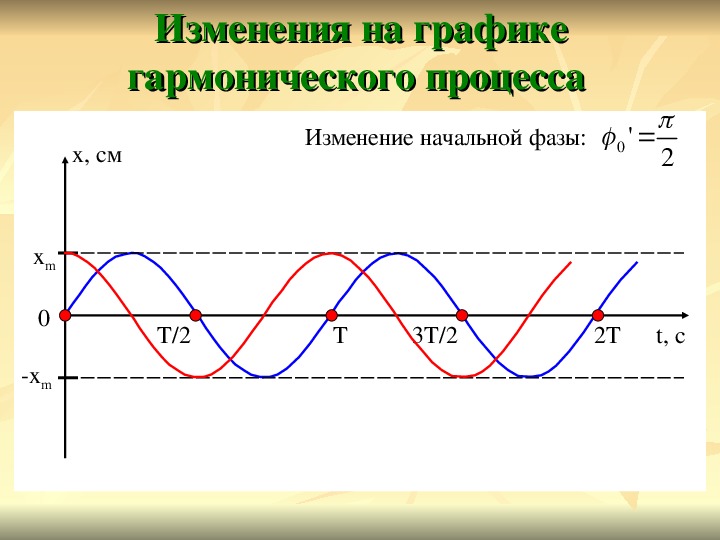
Изменения на графике
Изменения на графике
гармонического процесса
гармонического процесса
Изменение амплитуды:
xm’ > xm
x, см
Т/2
Т
3Т/2
2Т
t, с
xm’
xm
0
xm
xm’
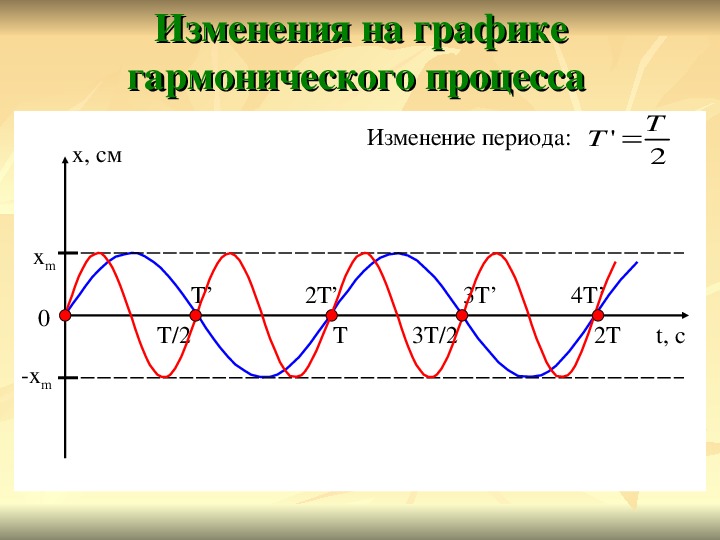
Изменения на графике
Изменения на графике
гармонического процесса
гармонического процесса
Изменение периода:
Т
'
Т
2
Т’
Т/2
2Т’
Т
3Т’
4Т’
3Т/2
2Т
t, с
x, см
xm
0
xm
Изменения на графике
Изменения на графике
гармонического процесса
гармонического процесса
Изменение начальной фазы:
x, см
'0
2
xm
0
xm
Т/2
Т
3Т/2
2Т
t, с
Энергетические превращения
Энергетические превращения
При механических колебаниях груза на
При механических колебаниях груза на
пружине происходит периодическое
пружине происходит периодическое
превращение кинетической энергии
превращение кинетической энергии
движущегося груза EEкк и потенциальной
и потенциальной
движущегося груза
энергии EEпп системы, которая состоит из
системы, которая состоит из
энергии
потенциальной энергии деформированной
потенциальной энергии деформированной
пружины и потенциальной энергии груза в
пружины и потенциальной энергии груза в
поле тяжести.
поле тяжести.
Потенциальная энергия деформированной
Потенциальная энергия деформированной
пружины пропорциональна квадрату ее
пружины пропорциональна квадрату ее
удлинения (xx +
удлинения (
+ xx00))22/2.
kk((xx +
/2.
Потенциальная энергия груза в поле
Потенциальная энергия груза в поле
+ xx00) и, следовательно, равна
) и, следовательно, равна
тяжести равна –mgx+C
–mgx+C..
тяжести равна
Выберем для удобства произвольную
постоянную C таким образом, чтобы полная
потенциальная энергия системы была равна
нулю в положении равновесия:
1
2
2
kх
0
C
0
2
C
0kх
Тогда /2 и потенциальная
энергия системы Eп в произвольной
точке x выражается формулой
E
п
2
)
0
xxk
(
2
mgx
2
2
xk
2
xk
2
kxx
0
kxx
0
kx
2
0
2
mgx
xk
2
2
0
2
0
xk
2
mgx
Так как mg = kx0, то получим, что
xk
2
xk
2
xkx
0
kxx
0
2
2
E
п
Полная энергия системы E= Eк + Eп при
колебаниях остается неизменной, так как система
консервативна.
В этом можно убедиться и непосредственно,
подставляя смещение x и скорость v в
выражение для энергии:
2
sin
2
(
t
0
kA
2
cos
2
(
)
t
0
2
x
mv
2
mA
(
2
2
kx
2
sin
2
0
2
0
Am
1
2
(
)
t
2
0
E
1
2
1)
2
(
))
t
0
k
cos
2
Так как ,то
k2
0
m
1
2
kA
2
E
1
2
kA
2
(sin
2
(
)
t
0
cos
2
(
))
t
0
1
2
mA
2
2
0
Из последней формулы видно, что
неизменная полная энергия системы Е
совпадает с потенциальной энергией Eп в
точках наибольшего отклонения от
положения равновесия и совпадает с
кинетической энергией Eк при прохождении
груза через положение равновесия.
При взаимных превращений потенциальная
При взаимных превращений потенциальная
и кинетическая энергия совершают
и кинетическая энергия совершают
гармонические колебания с одинаковой
гармонические колебания с одинаковой
амплитудой EE/2/2 в противофазе друг с
в противофазе друг с
амплитудой
другом и с частотой
другом и с частотой
02
Чтобы убедиться в этом, преобразуем выражения для
Чтобы убедиться в этом, преобразуем выражения для
кинетической и потенциальной энергий с помощью
кинетической и потенциальной энергий с помощью
формул для тригонометрических функций
формул для тригонометрических функций
половинного аргумента:
половинного аргумента:
E
к
1
2
Am
2
0
2
sin
2
(
)
1
t
(2cos
)
t
0
0
E
2
E
к
1
2
Am
2
0
2
sin
2
(
)
1
t
(2cos
)
t
0
0
E
2
x(t)
A
0
Eк(t)
E/2
0
Eп(t)
E/2
0
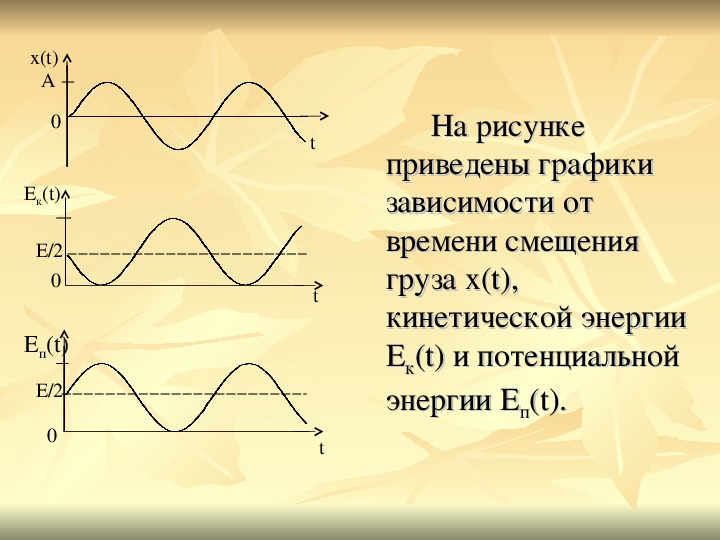
На рисунке
На рисунке
приведены графики
приведены графики
зависимости от
зависимости от
времени смещения
времени смещения
груза xx((tt), ),
груза
кинетической энергии
кинетической энергии
EEкк((tt) и потенциальной
) и потенциальной
энергии EEпп((tt). ).
энергии
t
t
t
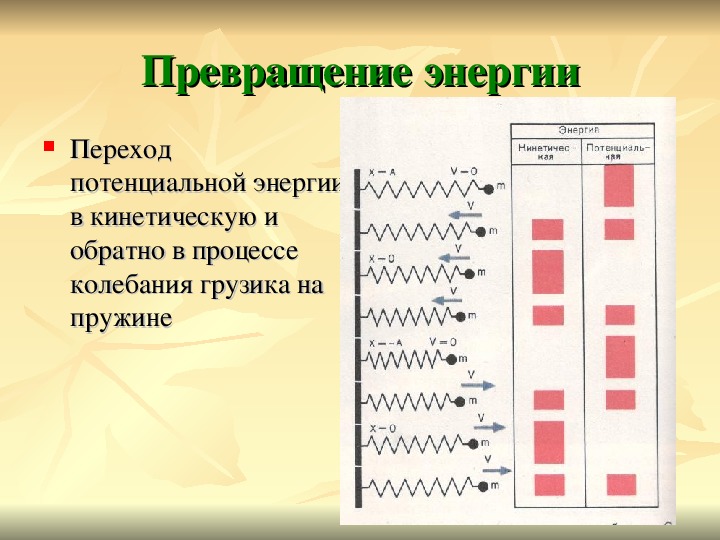
Превращение энергии
Превращение энергии
Переход
Переход
потенциальной энергии
потенциальной энергии
в кинетическую и
в кинетическую и
обратно в процессе
обратно в процессе
колебания грузика на
колебания грузика на
пружине
пружине
Выводы:
Выводы:
Механические колебания это движения тел,
повторяющиеся точно (или приблизительно) через
одинаковые промежутки времени;
Колебательное движение может быть представлено в
Колебательное движение может быть представлено в
математической форме с помощью соотношения
математической форме с помощью соотношения
2
0
mx" + x=0;
Гармонические колебания в механике представляют собой
периодические изменения смещения и скорости по закону
синуса или косинуса;
При механических колебаниях происходит периодическое
При механических колебаниях происходит периодическое
превращение кинетической энергии движущегося тела в
превращение кинетической энергии движущегося тела в
потенциальную энергию EEпп системы.
системы.
потенциальную энергию