Проект на тему "Создание модели робота гидроманипулятора-рука" был проведен учеником 10 класса. Проект такого рода можно провести по информатике, связав с темой- "Моделирование" или с физикой, связав с темой "Гидравлика". Проект не требует больших расходов, является большой мотивацией для школьников при создании различных проектов.
Тема проекта:
«СОЗДАНИЕ МОДЕЛИ
РОБОТА
ГИДРОМАНИПУЛЯТОРА –
РУКА»
Автор проекта:
Ученик 10 «А» класса
ОСШ №30 имени Ораза Жандосова
Бордей Владимир
Руководитель проекта:
Баймагамбетова Камила
Абдижаббаровна
Цель проекта:
создать модель роботагидроманипулятора «Рука».
Задачи проекта:
сделать чертежи данной модели;
выполнить расчеты;
приобрести нужный материал для изготовления
деталей робота;
изготовление частей робота «Рука»;
собрать данную модель.
Ожидаемый результат:
готовая модель роботагидроманипулятора «Рука».
Алгоритм создания робота
Алгоритм создания робота
Ознакомиться с теоретическим материалом по теме;
Ознакомиться с теоретическим материалом по теме;
Внимательно просмотреть видеоурок;
Внимательно просмотреть видеоурок;
Составить список необходимого материала для
Составить список необходимого материала для
деталей робота;
деталей робота;
Сделать чертежи данной модели;
Сделать чертежи данной модели;
Рассчитать расходный материал для деталей робота
Рассчитать расходный материал для деталей робота;;
Приобрести необходимый материал;
Приобрести необходимый материал;
Изготовить и собрать детали робота.
Изготовить и собрать детали робота.
Первые упоминания о человекоподобных машинах встречаются ещё в древнегреческих
Первые упоминания о человекоподобных машинах встречаются ещё в древнегреческих
мифах. Многие считают, что первые роботы появились только во второй половине XX века,
Многие считают, что первые роботы появились только во второй половине XX века,
мифах.
однако это мнение ошибочно: человекоподобные автоматы появились намного раньше. Из
однако это мнение ошибочно: человекоподобные автоматы появились намного раньше. Из
мифов Древней Греции мы узнаем, что роботы были уже во времена греческих богов. Мифы
мифов Древней Греции мы узнаем, что роботы были уже во времена греческих богов. Мифы
повествуют нам о медном великане Талосе, охраняющем остров Крит, позолоченных
повествуют нам о медном великане Талосе, охраняющем остров Крит, позолоченных
девушках и железных треножниках бога Гефеста.
девушках и железных треножниках бога Гефеста.
Слово «робот» в смысле «искусственный человек» впервые было использовано
Слово «робот» в смысле «искусственный человек» впервые было использовано
Карелом Чапеком и его братом Йозефом в пьесе «Р.У.Р» («Россумские Универсальные
и его братом Йозефом в пьесе «Р.У.Р» («Россумские Универсальные
Карелом Чапеком
Роботы»), в которой рассказывается о восстании роботовандроидов. Примечательно, что на
Роботы»), в которой рассказывается о восстании роботовандроидов. Примечательно, что на
чешском языке слово «робот» означает «каторга» или «барщина», и пьеса написана в
чешском языке слово «робот» означает «каторга» или «барщина», и пьеса написана в
революционном ключе (1920), где Роботами называли механических людей.
(1920), где Роботами называли механических людей.
революционном ключе
Андр идоо
Андр идоо
(от греч. корня
(от греч. корня
слова
слова
εἶδος
εἶδος
— «подобие») —
— от греч. слова
— от греч. слова
— «подобие») —
обычно подразумевается робот
робот..
обычно подразумевается
ἀνδρ
ἀνδρ
ἀνήρἀνήρ — «человек, мужчина» и суффикса
— «человек, мужчина» и суффикса oidoid
человекоподобный . В современном значении
. В современном значении
человекоподобный
Робот машина с человекоподобным поведением, которая частично или полностью
машина с человекоподобным поведением, которая частично или полностью
Робот
выполняет функции человека (иногда животного) при взаимодействии с окружающим миром.
выполняет функции человека (иногда животного) при взаимодействии с окружающим миром.
Первые Роботы ("андроиды", имитировавшие движения и внешний облик человека)
Первые Роботы ("андроиды", имитировавшие движения и внешний облик человека)
использовались преимущественно в развлекательных целях.
использовались преимущественно в развлекательных целях.
С 30х г. ХХ в. в связи с автоматизацией производства Роботы
автоматы стали применять в промышленности наряду с традиционными
средствами автоматизации технологических процессов, в частности в
мелкосерийном производстве и особенно в цехах с вредными условиями
труда. Промышленный Робот манипулятор имеет "механическую руку"
(одну или несколько) и вынесенный пульт управления или встроенное
устройство программного управления. Он может, например, перемещать
детали массой до нескольких десятков кг в радиусе действия его
"механических рук" (до 2 м), выполняя от 200 до 1000 перемещений в час.
Промышленные Роботы автоматы имеют преимущество перед человеком в
скорости и точности выполнения ручных однообразных операций. Наиболее
распространены Роботы манипуляторы с дистанционным управлением и
"механической рукой", закрепленной на подвижном или неподвижном
основании.
С развитием робототехники определились 3 разновидности Роботов:
с жёсткой программой действий;
манипуляторы, управляемые человекомоператором;
с искусственным интеллектом (иногда называемые интегральными),
действующие "разумно», без вмешательства человека.
История механических рук начинается с атомной физики. Дело в том, что многие
История механических рук начинается с атомной физики. Дело в том, что многие
материалы, с которыми приходится иметь дело в этой области науки, обладают
материалы, с которыми приходится иметь дело в этой области науки, обладают
радиоактивностью свойством выделять в окружающее пространство опасные для
радиоактивностью свойством выделять в окружающее пространство опасные для
здоровья человека лучи. Механические руки стали устанавливать там, куда доступ
здоровья человека лучи. Механические руки стали устанавливать там, куда доступ
человека нежелателен, а сам он, управляющий руками, располагался в другом,
человека нежелателен, а сам он, управляющий руками, располагался в другом,
безопасном помещении. Можно сказать, что в этих копирующих манипуляторах была
безопасном помещении. Можно сказать, что в этих копирующих манипуляторах была
использована та же идея, что и в известных всем куклах марионетках. Оператор,
использована та же идея, что и в известных всем куклах марионетках. Оператор,
работающий на манипуляторе, рукой приводит в движение управляющий механизм,
работающий на манипуляторе, рукой приводит в движение управляющий механизм,
звенья которого соединены с соответствующими звеньями исполнительного механизма,
звенья которого соединены с соответствующими звеньями исполнительного механизма,
повторяющего все движения руки оператора.
повторяющего все движения руки оператора.
При работе с радиоактивными веществами расстояние от оператора до
При работе с радиоактивными веществами расстояние от оператора до
исполнительных рук манипулятора может доходить до десятков метров, при работах в
исполнительных рук манипулятора может доходить до десятков метров, при работах в
подводном мире до тысяч метров. При применении манипуляторов в космическом
подводном мире до тысяч метров. При применении манипуляторов в космическом
пространстве это расстояние будет измеряться сотнями тысяч, миллионами
пространстве это расстояние будет измеряться сотнями тысяч, миллионами
километров… Надёжное и точное управление на значительном расстоянии вот первое
километров… Надёжное и точное управление на значительном расстоянии вот первое
требование, которое предъявляют к любой конструкции копирующего манипулятора
требование, которое предъявляют к любой конструкции копирующего манипулятора

Используемые простые механизмы могут быть устроены очень
Используемые простые механизмы могут быть устроены очень
сложно, однако для понимания их работы достаточно изучить
сложно, однако для понимания их работы достаточно изучить
простые механизмы.
простые механизмы.
Преимущество
Преимущество
заключается
заключается
в их легкости, доступности материалов и простоте изготовления.
в их легкости, доступности материалов и простоте изготовления.
Все, что вам понадобится — это несколько медицинских шприцов
Все, что вам понадобится — это несколько медицинских шприцов
без игл, набор резиновых трубок и пластик, из которого будет
без игл, набор резиновых трубок и пластик, из которого будет
выполнен корпус манипулятора. Управление системой происходит
выполнен корпус манипулятора. Управление системой происходит
с помощью регулировки уровня жидкости шприцевыми поршнями,
с помощью регулировки уровня жидкости шприцевыми поршнями,
что обеспечивает роботу игрушке подвижность и гибкость.
что обеспечивает роботу игрушке подвижность и гибкость.
гидравлических механизмов
гидравлических механизмов
МАТЕРИАЛ,
МАТЕРИАЛ,
ИСПОЛЬЗУЕМЫЙ ДЛЯ РАБОТЫ
ИСПОЛЬЗУЕМЫЙ ДЛЯ РАБОТЫ
из которого будет выполнено основание манипулятора 17см х 34см /200тг;
/200тг;
медицинские шприцы без игл 8шт по 15тг
медицинские шприцы без игл 8шт по 15тг
шланги от 1ой капельницы – 85тг;
шланги от 1ой капельницы – 85тг;
кусок фанеры – 30см х 20 см/200тг;
кусок фанеры – 30см х 20 см/200тг;
кусок ДСП,
кусок ДСП, из которого будет выполнено основание манипулятора 17см х 34см
металлические уголки 2шт х 25тг;
металлические уголки 2шт х 25тг;
гайки 6шт х 5тг;
гайки 6шт х 5тг;
болт – 1штх10тг;
болт – 1штх10тг;
проволоки 1520см/ 20тг;
проволоки 1520см/ 20тг;
пластиковые стяжки 25шт х 5тг.
пластиковые стяжки 25шт х 5тг.
Общая себестоимость 840 тг
840 тг
Общая себестоимость
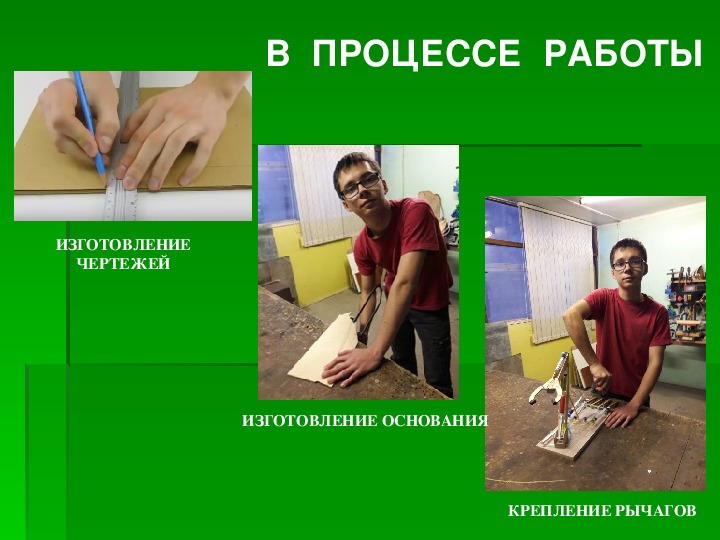
В ПРОЦЕССЕ РАБОТЫ
ИЗГОТОВЛЕНИЕ
ЧЕРТЕЖЕЙ
ИЗГОТОВЛЕНИЕ ОСНОВАНИЯ
КРЕПЛЕНИЕ РЫЧАГОВ
ПОДСТАВКАОСНОВАНИЕ МОДЕЛИ
«РУКА» МАНИПУЛЯТОРА
ГОТОВАЯ МОДЕЛЬ
ИСПОЛЬЗОВАННЫЙ ТЕОРИТИЧЕСКИЙ МАТЕРИАЛ:
https://www.youtube.com/watch?
https://www.youtube.com/watch?
v=sd4Vh9SFPpk
v=sd4Vh9SFPpk
http://www.popmech.ru/diy/345272kaksdelat
http://www.popmech.ru/diy/345272kaksdelat
gidravlicheskiymanipulyatorsvoimirukami/
gidravlicheskiymanipulyatorsvoimirukami/
http://zazdoc.ru/docs/2800/index1621281.html
http://zazdoc.ru/docs/2800/index1621281.html
http://knowledge.allbest.ru/programming/3c0a65
http://knowledge.allbest.ru/programming/3c0a65
635b3ac78a4d43b89421216d37_0.html
635b3ac78a4d43b89421216d37_0.html
ЗАКЛЮЧЕН
ИЕ:
В результате выполненной работы оказалось, что мой робот
можно использовать для развития математической грамотности,
грамотности чтения и в качестве наглядного пособия на уроках:
информатики: для демонстрации материальной модели мини
робота;
физики: для демонстрации гидравлического давления, работы
гидравлической машины;
географии/ экологии: использование жидкости позволяет не
наносить вреда на окружающую среду, защита окружающей
среды;
математики/ экономики: рассчет расхода материала,
вычисление площади, измерение длины;
технологии: обработка деталей (работа по дереву,
использование столярных инструментов);
черчения: изготовление эскизов, чертежей.
СПАСИБО
СПАСИБО
ЗА ВНИМАНИЕ.
ЗА ВНИМАНИЕ.