Поделиться

Программа по внеурочной деятельности «Робототехника»
для 7–8 классов
Программа разработана как самостоятельная дисциплина, являющаяся образовательным компонентом основного общего образования. Основное назначение курса "Робототехники" состоит в выполнении социального заказа современного общества, направленного на подготовку подрастающего поколения к полноценной работе в условиях глобальной информатизации всех сторон общественной жизни.
Робототехника является одним из важнейших направлений научно - технического прогресса, в котором проблемы механики и новых технологий соприкасаются с проблемами искусственного интеллекта.
Данная программа предлагает использование образовательных конструкторов из робототехнического набора VEX IQ как инструмента для обучения детей конструированию и моделированию, а также управлению роботом на занятиях по робототехнике. Программа рассчитана на 2 года, 70 часов и адаптирована под конструктор ТЕХНОлаб набор VEX IQ.
Результаты освоения курса внеурочной деятельности
Личностные результаты обучения:
· формирование познавательных интересов, интеллектуальных и творческих способностей обучающихся;
· формирование целостного мировоззрения, соответствующего современному уровню развития науки и технологий;
· самостоятельность в приобретении новых знаний и практических умений;
· готовность к выбору жизненного пути в соответствии с собственными интересами и возможностями;
· проявление технико-технологического мышления при организации своей деятельности;
· мотивация образовательной деятельности школьников на основе личностно ориентированного подхода;
· формирование ценностных отношений друг к другу, учителю, авторам открытий и изобретений, результатам обучения;
· формирование коммуникативной компетентности в процессе проектной, учебно-исследовательской, игровой деятельности.
Метапредметные результаты:
· овладение составляющими исследовательской и проектной деятельности: умения видеть проблему, ставить вопросы, выдвигать гипотезы, давать определения понятиям, классифицировать, наблюдать, проводить эксперименты, делать выводы и заключения, структурировать материал, объяснять, доказывать, защищать свои идеи;
· умение самостоятельно определять цели своего обучения, ставить и формулировать для себя новые задачи в учёбе и познавательной деятельности, развивать мотивы и интересы своей познавательной деятельности;
· овладение основами самоконтроля, самооценки, принятия решений и осуществления осознанного выбора в учебной и познавательной деятельности;
· умение создавать, применять и преобразовывать знаки и символы, модели, схемы для решения учебных и познавательных задач;
· развитие монологической и диалогической речи, умения выражать свои мысли, способности выслушивать собеседника, понимать его точку зрения, признавать право другого человека на иное мнение;
· формирование умений работать в группе с выполнением различных социальных ролей, представлять и отстаивать свои взгляды и убеждения, вести дискуссию;
· комбинирование известных алгоритмов технического и технологического творчества в ситуациях, не предполагающих стандартного применения одного из них;
· поиск новых решений возникшей технической или организационной проблемы;
· самостоятельная организация и выполнение различных творческих работ по созданию технических изделий;
· виртуальное и натурное моделирование технических объектов и технологических процессов;
· проявление инновационного подхода к решению учебных и практических задач в процессе моделирования изделия или технологического процесса;
· выявление потребностей, проектирование и создание объектов, имеющих потребительную стоимость;
· формирование и развитие компетентности в области использования информационно-коммуникационных технологий.
Предметные результаты обучения:
· умение использовать термины области «Робототехника»;
· умение конструировать механизмы для преобразования движения;
· умение конструировать модели, использующие механические передачи, редукторы;
· умение конструировать мобильных роботов, используя различные системы передвижения;
· умение программировать контролер и сенсорные системы;
· умение конструировать модели промышленных роботов с различными геометрическими конфигурациями; умение составлять линейные алгоритмы управления исполнителями и записывать их на выбранном языке программирования;
· умение использовать логические значения, операции и выражения с ними; умение формально выполнять алгоритмы, описанные с использованием конструкций ветвления (условные операторы) и повторения (циклы), вспомогательных алгоритмов, простых и табличных величин; умение создавать и выполнять программы для решения несложных алгоритмических задач в выбранной среде программирования;
· умение использовать готовые прикладные компьютерные программы и сервисы в выбранной специализации, умение работать с описаниями программ и сервисами;
· навыки выбора способа представления данных в зависимости от постановленной задачи;
· рациональное использование учебной и дополнительной технической и технологической информации для проектирования и создания роботов и робототехнических систем;
· владение алгоритмами и методами решения организационных и технических задач;
· владение методами чтения и способами графического представления технической, технологической и инструктивной информации;
· применение общенаучных знаний по предметам естественнонаучного и математического цикла в процессе подготовки и осуществления технологических процессов;
· владение формами учебно-исследовательской, проектной, игровой деятельности;
· планирование технологического процесса в процессе создания роботов и робототехнических систем.
Первый этап обучения: «Конструирование»
Курс «Конструирование» является базовым и не предполагает наличия у обучаемых навыков в области конструирования и программирования. Уровень подготовки учащихся может быть разным. Реализация данного этапа курса позволяет стимулировать интерес и любознательность, развивает способности к решению проблемных ситуаций умению исследовать проблему, анализировать имеющиеся ресурсы, выдвигать идеи, планировать решения и реализовывать их.
Включение в программу кружка вопросов, связанных с изучением множества примеров технологий преобразования энергии, используемых в прошлом и настоящем, позволит учащимся продвинуться по пути познания в области техники и ее возможностей.
Основными целями курса являются:
· приобретение учащимися навыков программирования, конструирования и проектирования;
· развитие логического мышления и пространственного воображения;
· расширение кругозора в познании окружающего мира, знакомство с простейшие механизмы и их место в жизни;
· знакомство со способами взаимодействия при работе над совместным проектом в группах.
Перечень знаний и умений, формируемых у учащихся.
В результате освоения программы данного курса, учащиеся должны знать:
· общие положения и основные принципы механики;
· виды движения: поступательное, вращательное, колебательное;
· способы преобразования вида, направления и скорости движения;
· развитие умения творчески подходить к решению задачи;
· развитие умения работать по предложенным инструкциям;
· названия деталей машин, приемы соединения деталей;
· способы сборки узлов из деталей, назначение узлов и применение их в технике;
· основные приемы сборки моделей из деталей и узлов робототехнического набора VEX IQ;
· развитие умения работать по воображаемым инструкциям;
· развитие умения довести решение задачи до работающей модели;
· развитие умения излагать мысли в четкой логической последовательности, отстаивать свою точку зрения, анализировать ситуацию и самостоятельно находить ответы на вопросы, путем логических рассуждений.
· интерфейс программного обеспечения VEX IQ
В результате освоения данного раздела программы, учащиеся должны уметь:
· собирать действующие модели по технологическим картам;
· доводить решение задачи до работающей модели;
· объединять разнообразные компоненты в единую функциональную систему;
· перепроектировать технологические системы и их элементы для решения новых задач.
Ожидаемые результаты:
· Освоение основных правил объединения, приобретение навыков работы в коллективе
· Развить познавательные умения и навыки учащихся;
· Уметь довести решение задачи до работающей модели;
· Уметь ориентироваться в информационном пространстве;
· Уметь самостоятельно конструировать свои знания;
· Уметь критически мыслить.
Средства обучения:
· Виртуальные исполнители: Лого, КуМир.
· Робототехнический набор VEX IQ с программным обеспечением к нему.
· Цифровые разработки к урокам (презентации, сайты, тесты и т.д.).
Второй этап обучения «Робототехника»
Курс позволяет легко понять основы робототехники и научиться конструировать умные управляемые машины. Это захватывающие занятия, на которых разрабатываются технические модели из LEGO-конструкторов и программируются микрокомпьютеры. Собранные модели живут по заданной программе и соревнуются между собой.
Занятия начинаются с обсуждения принципов построения интересной модели конструктора, далее идет непосредственная сборка и установка моторов и датчиков обратной связи. Собранная конструкция присоединяется к компьютеру, который представляет из себя программируемый блок, функционирующий как автономный компьютер. В ходе практических занятий учащиеся строят действующие модели реальных механизмов, живых организмов и машин, проводят естественнонаучные эксперименты, осваивают основы информатики, алгоритмики и робототехники, попутно укрепляя свои знания по математике и физике, приобретают навыки работы в творческом коллективе. Работая парами, или в командах, учащиеся в рамках данного курса создают и программируют модели, проводят исследования, составляют отчёты и обсуждают идеи, возникающие во время работы с этими моделями.
Учащимся данного курса предоставляется возможность принять участие в муниципальных и региональных соревнованиях по робототехнике.
Цель данного курса – посредством конструирования и программирования роботов, научить учащихся самостоятельно мыслить, находить и решать проблемы, привлекая для этого знания из разных областей, уметь прогнозировать результаты и возможные последствия разных вариантов решения.
Задачи:
· Закрепление и углубление навыков конструирования и проектирования;
· Способствовать развитию интереса к технике, конструированию, программированию, высоким технологиям, формировать навыки коллективного труда.
· Научить учеников формализации, сравнению, обобщению, синтезу полученной информации с имеющимися базами знаний.
· Сформировать у учащихся умение классифицировать задачи по типам с последующим решением и выбором определённого технического средства в зависимости от его основных характеристик.
· Сформировать алгоритм действий по разработке вариантов использования информации и прогнозированию последствий реализации решения проблемной ситуации (конкретной задачи, для решения которой разрабатывается робот).
· Прививать навыки программирования через разработку программ в визуальной среде программирования, развивать алгоритмическое мышление
Учащиеся должны знать:
· влияние технологической деятельности человека на окружающую среду и здоровье;
· область применения и назначение инструментов, различных машин и механизмов, технических устройств (в том числе компьютеров);
· источник, способы преобразования и сохранения энергии;
· виды передаточных механизмов и их технические характеристики;
· конструктивные особенности различных моделей, сооружений и механизмов;
· виды подвижных и неподвижных соединений в конструкторе;
· основные приемы конструирования роботов;
· основные понятия, использующие в робототехнике: микрокомпьютер, датчик, сенсор, порт, разъем, ультразвук, USB-кабель, интерфейс, иконка, программное обеспечение, меню, подменю, панель инструментов;
· интерфейс программного обеспечения VEX IQ.
Учащиеся должны уметь:
· получать необходимую информацию об объекте деятельности, используя рисунки, схемы, эскизы, чертежи (на бумажных и электронных носителях);
· осуществлять простейшие операции с файлами;
· самостоятельно решать технические задачи в процессе конструирования роботов (планирование предстоящих действий, самоконтроль, применять полученные знания, приемы и опыт конструирования и т.д.);
· создавать модели при помощи специальных элементов по разработанной схеме, инструкции, по собственному замыслу;
· демонстрировать технические возможности роботов;
· представлять одну и ту же информацию различными способами;
· осуществлять поиск, преобразование, хранение и передачу информации, используя указатели, каталоги, справочники, Интернет.
Ожидаемые результаты:
· умение самостоятельно и мотивированно организовывать свою познавательную деятельность (от постановки цели до получения и оценки результата);
· поиск (проверка) необходимой информации в словарях, каталоге библиотеки, на электронных носителях;
· элементарное обоснование высказанного суждения;
· выполнение инструкций, точное следование образцу и простейшим алгоритмам.
· создание условий для повышения уровня мастерства;
· знание основ робототехники;
· самоопределение по отношению к социально-этическим ценностям объединения;
· знание основных форм и требований к проведению товарищеских встреч, соревнований по конструированию на школьном, муниципальном уровне.
Курс рассчитан на 2 года обучения (70 часов), 1 час в неделю. Возраст детей 12-14 лет.
Содержание программы
1. Общие представления о робототехнике
Введение в конструирование.Общие представления об образовательных конструкторах. Краткое резюме того, что будут изучать учащиеся на протяжении всего курса обучения. Основные способы и принципы конструирования. Демонстрация видеороликов проектов «Робототехника».
Практическая работа: Сборка (виртуально) деталей образовательного конструктора VEX IQ.
Робототехника
Основные понятия робототехники. История робототехники. Общие представления об образовательном конструкторе VEX IQ. Общие представления о программном обеспечении Robolab.
Практические работы:
а. Конструирование робота по технологической карте.
б. Знакомство с интерфейсом программного обеспечения.
в. Программирование робота с помощью элементарных команд контроллера.
г. Знакомство с интерфейсом программного обеспечения Robolab
2. Основы конструирования машин и механизмов
Этапы конструирования. Требования, предъявляемые к конструкциям: прочность, жесткость, устойчивость. Анализ существующих конструкций программно управляемых машин и принципов их работы. Алгоритм конструирования по инструкциям. Значение машин, механизмов в жизни человека. Виды простых механизмов. Характеристика типовых деталей механизмов выполняемых из конструктора VEX IQ. Общие представления о механических передачах. Классификация передаточных механизмов. Кинематические схемы механизмов. Механизмы для преобразования движения (зубчато-реечный, винтовой, кривошипный, кулисный, кулачковый). Зубчатые передачи (цилиндрические, конические, червячная). Редукторы, мультипликаторы: виды, характеристика.
Практические работы:
а. Способы соединения деталей конструктора VEX IQ.
б. Создание механизмов для преобразования движения: зубчато-реечный, винтовой, кривошипный, кулисный, кулачковый.
в. Создание моделей, использующих зубчатые (цилиндрические, конические, червячная), цепные, ременные, фрикционные передачи.
г. Создание моделей, использующих двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
д. Создание цилиндрических, конических, коническо-цилиндрических, червячных редукторов.
3. Системы передвижения роботов
Потребности мобильных роботов. Типы мобильности. Колесные системы передвижения роботов: автомобильная группа, группа с произвольным независимым поворотом каждого колеса влево и вправо. Шагающие системы передвижения роботов: робот с 2-я конечностями, робот с 4-я конечностями, робот с 6-ю конечностями.
Практические работы:
а. Конструирование и программирование робота автомобильной группы.
б. Конструирование и программирование робота с произвольным независимым поворотом каждого колеса влево и вправо.
в. Роботы передвигающиеся на гусеничном ходу.
г. Конструирование и программирование шагающего робота с 2-я конечностями.
д. Конструирование и программирование шагающего робота с 4-я конечностями.
е. Конструирование и программирование шагающего робота с 6-ю конечностями.
4. Контроллер. Сенсорные системы
Общее представление о контроллере. Датчик. Звуковой датчик. Ультразвуковой датчик. Световой датчик. Система с использованием нескольких датчиков.
Практические работы:
а. Вывод изображений, набора текстового фрагмента или рисования на дисплее.
б. Воспроизведение звукового файла или какого-либо одиночного звука контроллером.
в. Управление роботом через Bluetooth.
г. Использование датчика касания для преодоления препятствий робота.
д. Действия робота на звуковые сигналы.
е. Огибание препятствий роботом при использовании ультразвукового датчика.
ж. Движение робота по черной линии (используется один, два световых датчика).
з. Конструирование и программирования робота, использующего систему из нескольких датчиков.
5. Манипуляционные системы
Структура и составные элементы промышленного робота. Рабочие органы манипуляторов. Сенсорные устройства, применяемые в различных технологических операциях. Геометрические конфигурации роботов: декартовая система координат, цилиндрическая система координат, сферическая система координат.
Практические работы:
а. Конструирование и программирование рабочего органа манипулятора с датчиком касания.
б. Конструирование и программирование рабочего органа манипулятора со световым датчиком.
в. Конструирование и программирование рабочего органа манипулятора с ультразвуковым датчиком.
г. Конструирование и программирование промышленного робота с траекторией движения в декартовой системе координат.
д. Конструирование и программирование промышленного робота с траекторией движения цилиндрической системе координат.
е. Конструирование и программирование промышленного робота с траекторией движения в сферической системе координат.
6. Разработка проекта
Требования к проекту. Определение и утверждение тематики проектов. Обсуждение возможных источников информации, вопросов защиты авторских прав. Алгоритм подготовки выступления. Как выбрать содержание и стиль презентации.
Практические работы:
а. Разработка плана выполнения проектной работы: формулирование цели проекта, составление графика работы над проектом.
б. Моделирование объекта.
в. Конструирование модели.
г. Программирование модели.
д. Оформление проекта.
е. Защита проекта.
7. Контроль качества знаний
Контрольное тестирование.
Анализ собранных моделей.
|
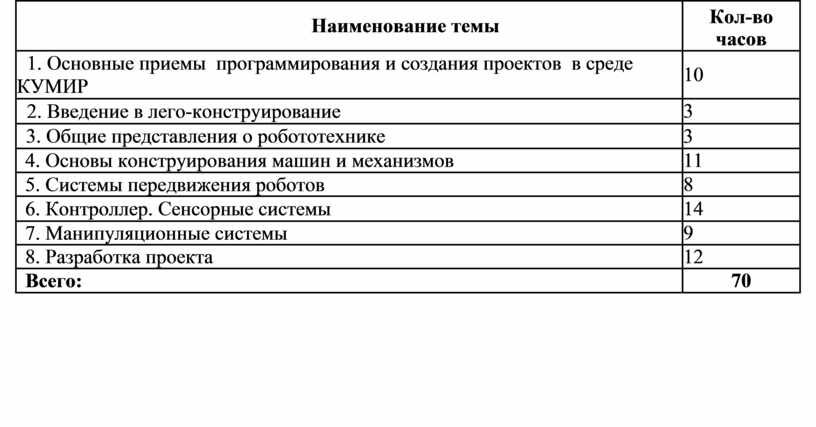
Наименование темы |
Кол-во часов |
|
|
1. Основные приемы программирования и создания проектов в среде КУМИР |
10 |
|
|
2. Введение в лего-конструирование |
3 |
|
|
3. Общие представления о робототехнике |
3 |
|
|
4. Основы конструирования машин и механизмов |
11 |
|
|
5. Системы передвижения роботов |
8 |
|
|
6. Контроллер. Сенсорные системы |
14 |
|
|
7. Манипуляционные системы |
9 |
|
|
8. Разработка проекта |
12 |
|
|
Всего: |
70 |
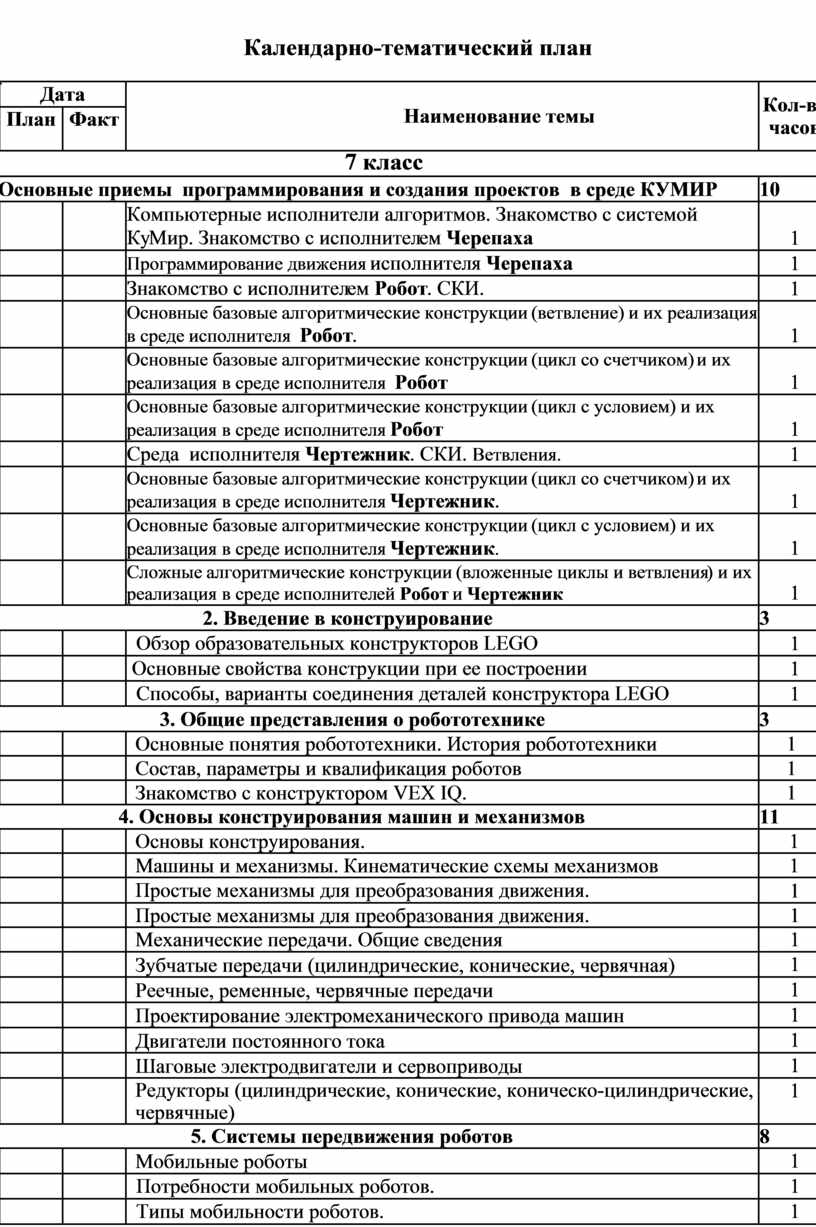
Календарно-тематический план
|
№ занятия |
|
Наименование темы |
Кол-во часов |
|
|
План |
Факт |
|||
|
7 класс |
||||
|
1. Основные приемы программирования и создания проектов в среде КУМИР |
10 |
|||
|
1 |
|
|
Компьютерные исполнители алгоритмов. Знакомство с системой КуМир. Знакомство с исполнителем Черепаха |
1 |
|
2 |
|
|
Программирование движения исполнителя Черепаха |
1 |
|
3 |
|
|
Знакомство с исполнителем Робот. СКИ. |
1 |
|
4 |
|
|
Основные базовые алгоритмические конструкции (ветвление) и их реализация в среде исполнителя Робот. |
1 |
|
5 |
|
|
Основные базовые алгоритмические конструкции (цикл со счетчиком) и их реализация в среде исполнителя Робот |
1 |
|
6 |
|
|
Основные базовые алгоритмические конструкции (цикл с условием) и их реализация в среде исполнителя Робот |
1 |
|
7 |
|
|
Среда исполнителя Чертежник. СКИ. Ветвления. |
1 |
|
8 |
|
|
Основные базовые алгоритмические конструкции (цикл со счетчиком) и их реализация в среде исполнителя Чертежник. |
1 |
|
9 |
|
|
Основные базовые алгоритмические конструкции (цикл с условием) и их реализация в среде исполнителя Чертежник. |
1 |
|
10 |
|
|
Сложные алгоритмические конструкции (вложенные циклы и ветвления) и их реализация в среде исполнителей Робот и Чертежник |
1 |
|
2. Введение в конструирование |
3 |
|||
|
11 |
|
|
Обзор образовательных конструкторов LEGO |
1 |
|
12 |
|
|
Основные свойства конструкции при ее построении |
1 |
|
13 |
|
|
Способы, варианты соединения деталей конструктора LEGO |
1 |
|
3. Общие представления о робототехнике |
3 |
|||
|
14 |
|
|
Основные понятия робототехники. История робототехники |
1 |
|
15 |
|
|
Состав, параметры и квалификация роботов |
1 |
|
16 |
|
|
Знакомство с конструктором VEX IQ. |
1 |
|
4. Основы конструирования машин и механизмов |
11 |
|||
|
17 |
|
|
Основы конструирования. |
1 |
|
18 |
|
|
Машины и механизмы. Кинематические схемы механизмов |
1 |
|
19 |
|
|
Простые механизмы для преобразования движения. |
1 |
|
20 |
|
|
Простые механизмы для преобразования движения. |
1 |
|
21 |
|
|
Механические передачи. Общие сведения |
1 |
|
22 |
|
|
Зубчатые передачи (цилиндрические, конические, червячная) |
1 |
|
23 |
|
|
Реечные, ременные, червячные передачи |
1 |
|
23 |
|
|
Проектирование электромеханического привода машин |
1 |
|
25 |
|
|
Двигатели постоянного тока |
1 |
|
26 |
|
|
Шаговые электродвигатели и сервоприводы |
1 |
|
27 |
|
|
Редукторы (цилиндрические, конические, коническо-цилиндрические, червячные) |
1 |
|
5. Системы передвижения роботов |
8 |
|||
|
28 |
|
|
Мобильные роботы |
1 |
|
29 |
|
|
Потребности мобильных роботов. |
1 |
|
30 |
|
|
Типы мобильности роботов. |
1 |
|
31 |
|
|
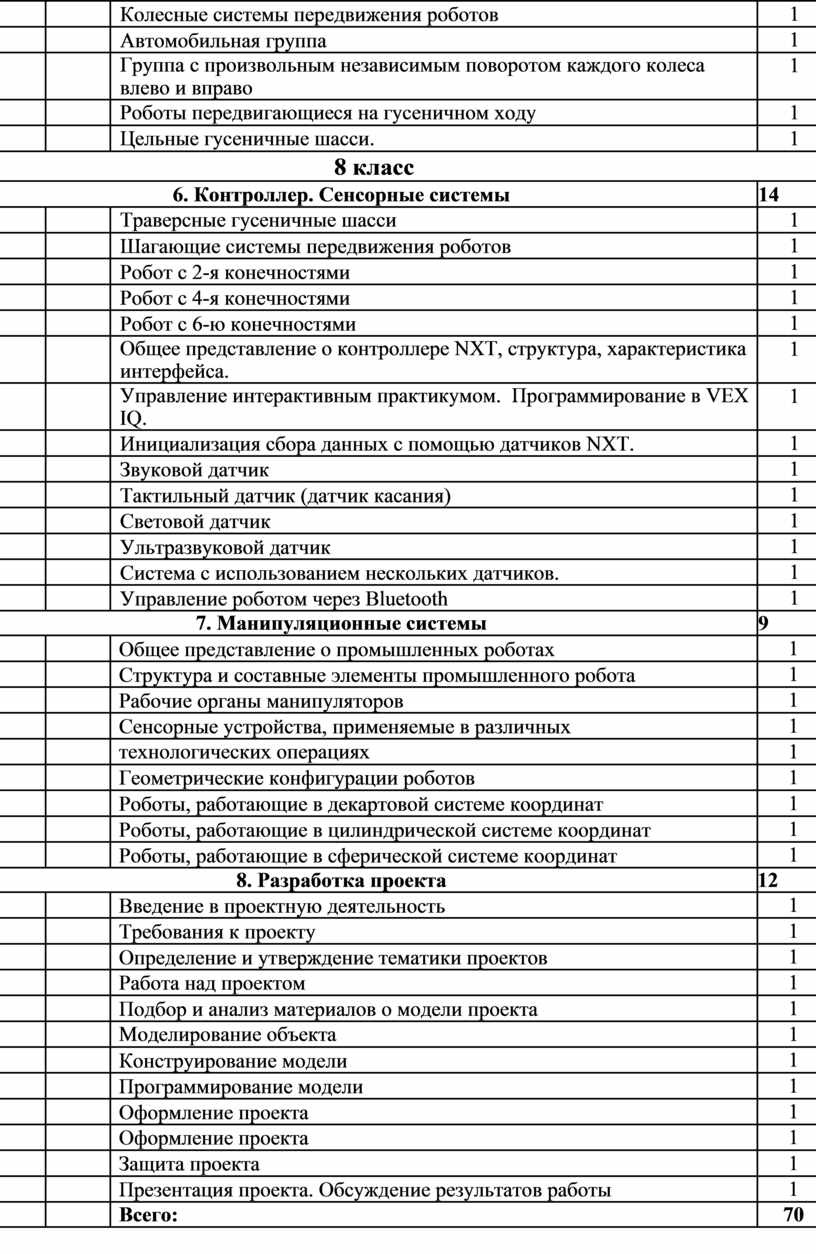
Колесные системы передвижения роботов |
1 |
|
32 |
|
|
Автомобильная группа |
1 |
|
33 |
|
|
Группа с произвольным независимым поворотом каждого колеса влево и вправо |
1 |
|
34 |
|
|
Роботы передвигающиеся на гусеничном ходу |
1 |
|
35 |
|
|
Цельные гусеничные шасси. |
1 |
|
8 класс |
||||
|
6. Контроллер. Сенсорные системы |
14 |
|||
|
1 |
|
|
Траверсные гусеничные шасси |
1 |
|
2 |
|
|
Шагающие системы передвижения роботов |
1 |
|
3 |
|
|
Робот с 2-я конечностями |
1 |
|
4 |
|
|
Робот с 4-я конечностями |
1 |
|
5 |
|
|
Робот с 6-ю конечностями |
1 |
|
6 |
|
|
Общее представление о контроллере NXT, структура, характеристика интерфейса. |
1 |
|
7 |
|
|
Управление интерактивным практикумом. Программирование в VEX IQ. |
1 |
|
8 |
|
|
Инициализация сбора данных с помощью датчиков NXT. |
1 |
|
9 |
|
|
Звуковой датчик |
1 |
|
10 |
|
|
Тактильный датчик (датчик касания) |
1 |
|
11 |
|
|
Световой датчик |
1 |
|
12 |
|
|
Ультразвуковой датчик |
1 |
|
13 |
|
|
Система с использованием нескольких датчиков. |
1 |
|
14 |
|
|
Управление роботом через Bluetooth |
1 |
|
7. Манипуляционные системы |
9 |
|||
|
15 |
|
|
Общее представление о промышленных роботах |
1 |
|
16 |
|
|
Структура и составные элементы промышленного робота |
1 |
|
17 |
|
|
Рабочие органы манипуляторов |
1 |
|
18 |
|
|
Сенсорные устройства, применяемые в различных |
1 |
|
19 |
|
|
технологических операциях |
1 |
|
20 |
|
|
Геометрические конфигурации роботов |
1 |
|
21 |
|
|
Роботы, работающие в декартовой системе координат |
1 |
|
22 |
|
|
Роботы, работающие в цилиндрической системе координат |
1 |
|
23 |
|
|
Роботы, работающие в сферической системе координат |
1 |
|
8. Разработка проекта |
12 |
|||
|
24 |
|
|
Введение в проектную деятельность |
1 |
|
25 |
|
|
Требования к проекту |
1 |
|
26 |
|
|
Определение и утверждение тематики проектов |
1 |
|
27 |
|
|
Работа над проектом |
1 |
|
28 |
|
|
Подбор и анализ материалов о модели проекта |
1 |
|
29 |
|
|
Моделирование объекта |
1 |
|
30 |
|
|
Конструирование модели |
1 |
|
31 |
|
|
Программирование модели |
1 |
|
32 |
|
|
Оформление проекта |
1 |
|
33 |
|
|
Оформление проекта |
1 |
|
34 |
|
|
Защита проекта |
1 |
|
35 |
|
|
Презентация проекта. Обсуждение результатов работы |
1 |
|
|
|
|
Всего: |
70 |
Скачано с www.znanio.ru
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
