

Методическое пособие предназначено для выполнения практических работ по дисциплине "Учебная практика" по профессиональному модулю ПМ01 "Осуществление комплекса работ по узловой сборке и пусконаладке манипуляторов на технологических позициях роботизированных участков" по специальности 15.02.11 "Техническая эксплуатация и обслуживание роботизированного производства"
В пособии представлено 5 практических работ для выполнения в среде разработки LEGO MINDSTORMS Edcation EV3
15.02.11 пм01 для 1 курса.docx
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ ХАБАРОВСКОГО КРАЯ
Краевое государственное автономное
профессиональное образовательное учреждение
«Губернаторский авиастроительный колледж
г. Комсомольска – на Амуре (Межрегиональный центр компетенций)»
СОГЛАСОВАНО
Зам. директора по ПР УПЦ
_______________ О. В. Большакова
«___» ________2018 г.
УТВЕРЖДАЮ
Директор УПЦ
_______________ О. И. Киница
«___» ________2018 г.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ ВЫПОЛНЕНИЯ
ПРАКТИЧЕСКИХ РАБОТ
По дисциплине «Учебная практика»
Осуществление комплекса работ по узловой сборке и пусконаладке
ПМ 01
манипуляторов на технологических позициях роботизированных участков
По специальности 15.02.11 Техническая эксплуатация и обслуживание
роботизированного производства
г. Комсомольск – на – Амуре
2018 г.
Организация разработчик: Краевое государственное автономное
профессиональное образовательное учреждение «Губернаторский авиастроительный колледж
г. Комсомольска – на Амуре (Межрегиональный
центр компетенций)»
Разработчик:
Хрипкова В.А., мастер производственного обучения КГА ПОУ ГАСКК МЦК
КГА ПОУ ГАСКК МЦК
г. Комсомольск – на Амуре
ул. Культурная д.3
тел.: (4217) 265054
СОДЕРЖАНИЕ
Практическая работа 1. Знакомство со средой разработки LEGO
MINDSTORMS Education EV3. Конструирование базовой модели робота
Практическая работа 2. Программирование робота с использованием
контроллера
Практическая работа 3. Программирование робота на выполнение
простых и сложных действий. Многозадачность
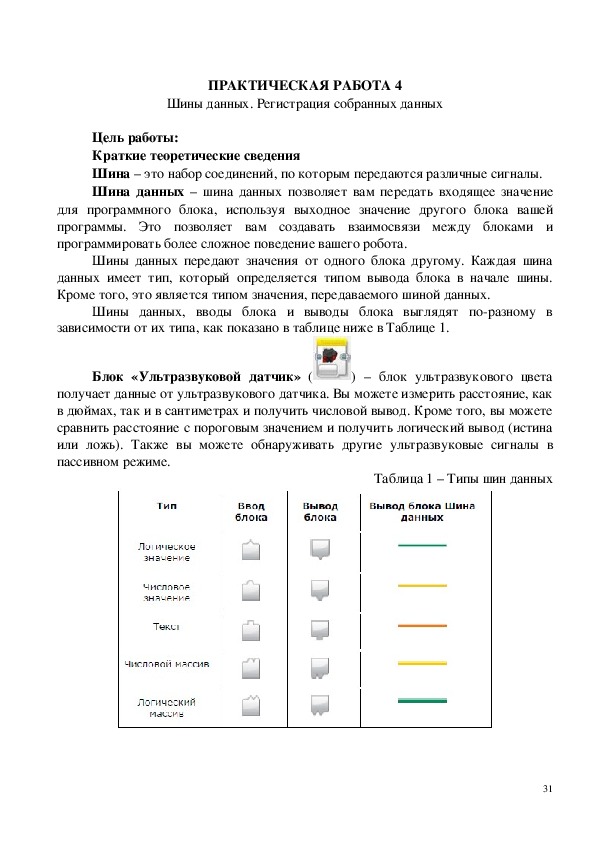
Практическая работа 4. Шины данных. Регистрация собранных данных
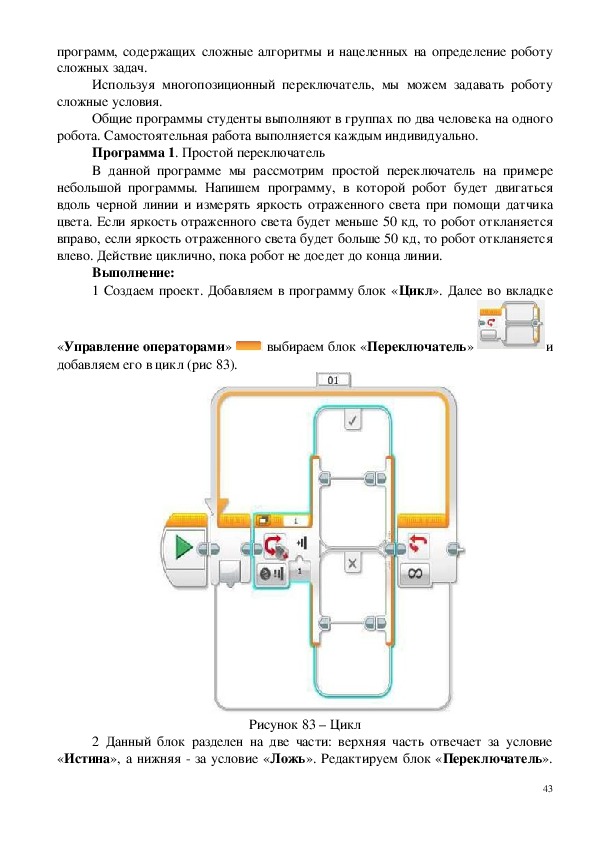
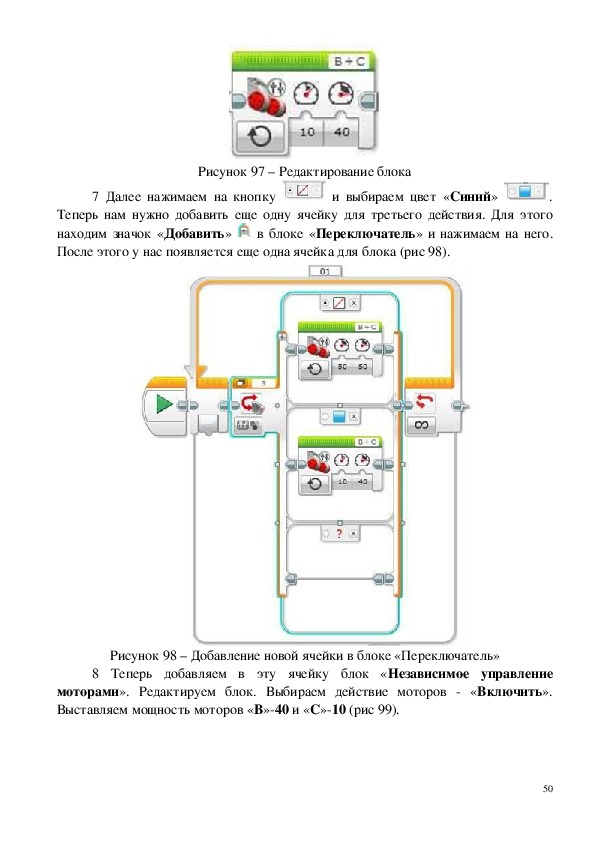
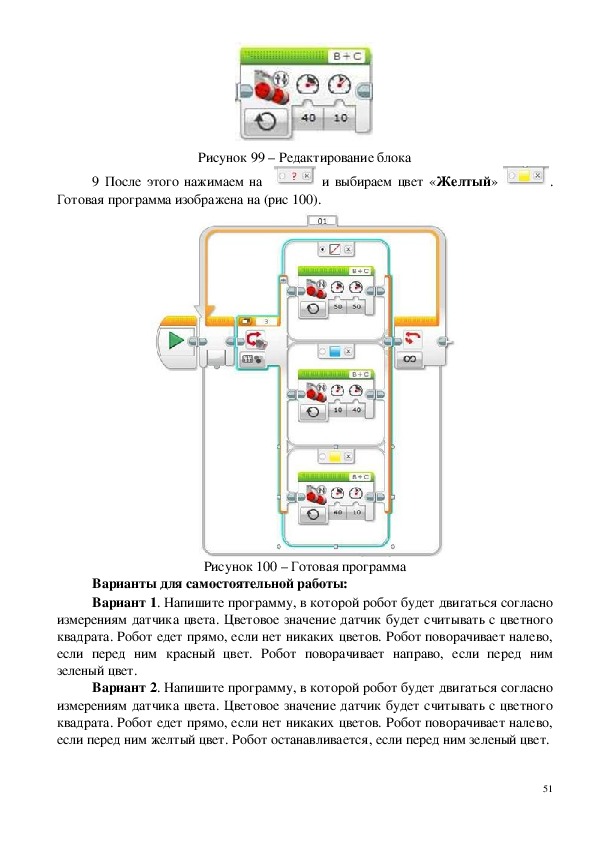
Практическая работа 5. Использование блока «Переключатель».
Программирование графиков
4
7
17
31
41
2 Знакомство со средой разработки LEGO MINDSTORMS Education EV3.
ПРАКТИЧЕСКАЯ РАБОТА 1
Конструирование базовой модели робота
Цель работы: ознакомление со средой разработки LEGO MINDSTORMS
Education EV3 и модулем EV3.
Краткие теоретические сведения
Робот автоматическое устройство, созданное по принципу живого
организма. Действуя по заранее заложенной программе и получая информацию о
внешнем мире от датчиков (аналогов органов чувств живых организмов), робот
самостоятельно осуществляет производственные и иные операции, обычно
выполняемые человеком (либо животными). При этом робот может иметь связь
как с оператором (получать от него команды), так и действовать автономно.
Контроллер это устройство управления и контроля процессами системы, в
которой он установлен. Контроллер преобразует код в управляющие сигналы и
выдает на внешние устройства. С внешних устройств он получает данные о
рабочих процессах и условиях окружающей среды, с помощью чего способен
самостоятельно контролировать некоторые действия системы.
Модуль EV3 это программируемый интеллектуальный контроллер,
который контролирует и управляет датчиками и моторами.
Технические характеристики модуля EV3:
процессор ARM9;
FLASH память 16 мегабайт;
оперативная память 64 мегабайта;
операционная система Linux;
слот расширения SD;
USB 2.0 (поддерживает USB Host, то есть можно подключить к WiFi);
Bluetooth 2.1;
4 порта на вход и 4 порта на выход;
динамик.
Программирование на контроллере EV3 позволит легко и быстро освоить
этапы составления программ и тестов для робота благодаря простому интерфейсу
и готовым программным блокам (компонентам).
Большой мотор это мощный мотор, который имеет встроенный датчик
вращения с разрешением 1 градус для точного контроля.
Датчик цвета это цифровой датчик, который может определять цвет или
яркость света, поступающие в небольшое окошко на лицевой части датчика.
Гироскопический датчик это цифровой датчик, который обнаруживает
вращательное движение вокруг одной оси.
Датчик касания это аналоговый датчик, который может определять, когда
красная кнопка нажата, а когда отпущена.
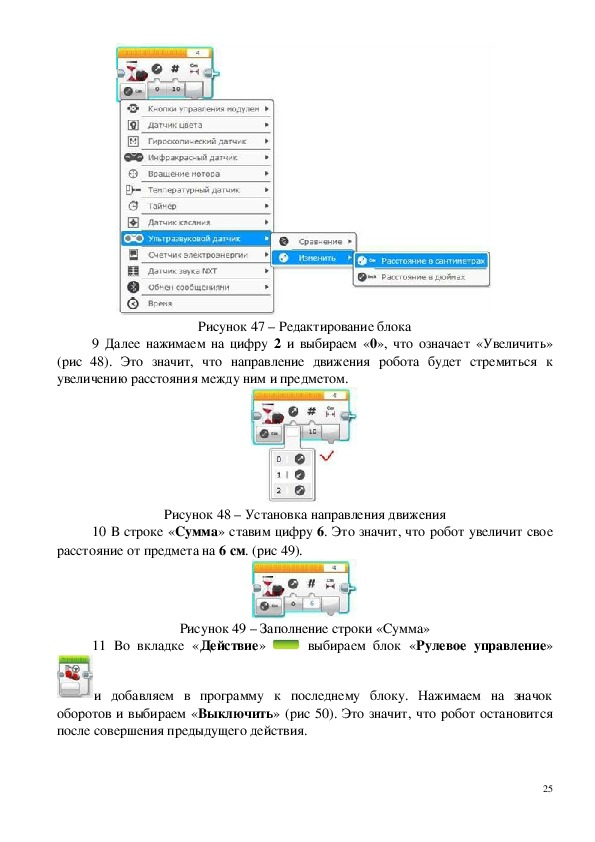
3 Ультразвуковой датчик это цифровой датчик, который определяет
расстояние до находящегося перед ним объекта.
Задание:
1 Рассмотреть и изучить датчики и контроллеры.
2 Собрать базовую модель робота.
3 Протестировать встроенную программу.
4 Установить ПО LEGO MINDSTORMS Education EV3.
Порядок выполнения:
1 Для знакомства с роботом EV3 и его программной средой разработки
LEGO MINDSTORMS Education EV3, отройте PDFфайл "Руководство
пользователя" и внимательно прочитайте его.
2 Изучите датчики и контроллеры с использованием "Руководства
пользователя".
3 Студенты разбиваются на группы по четыре человека и выполняют сборку
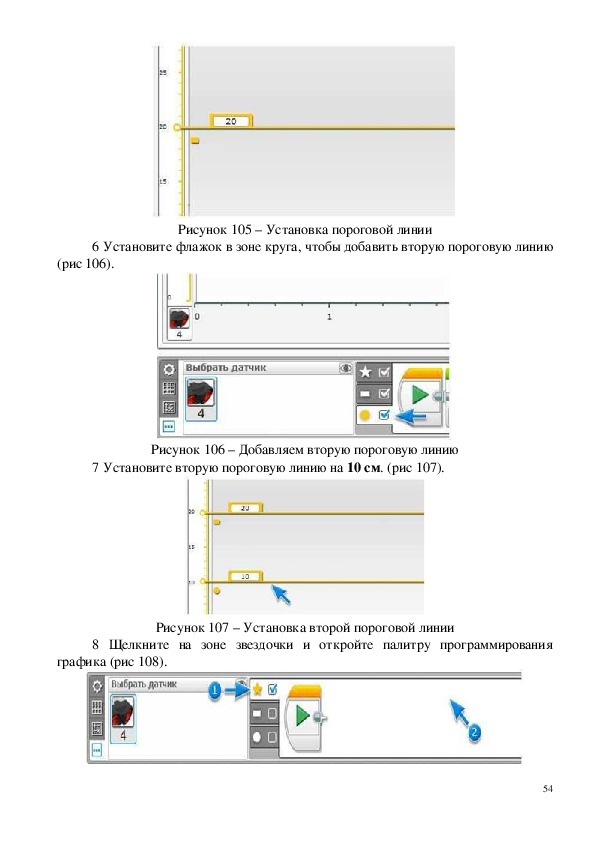
робота. Базовая модель робота содержит 4 основных датчика: ультразвуковой
датчик, датчик касания, датчик цвета и гироскоп. Передвижение робота будет
осуществляться при помощи двух больших моторов. Руководство по сборке
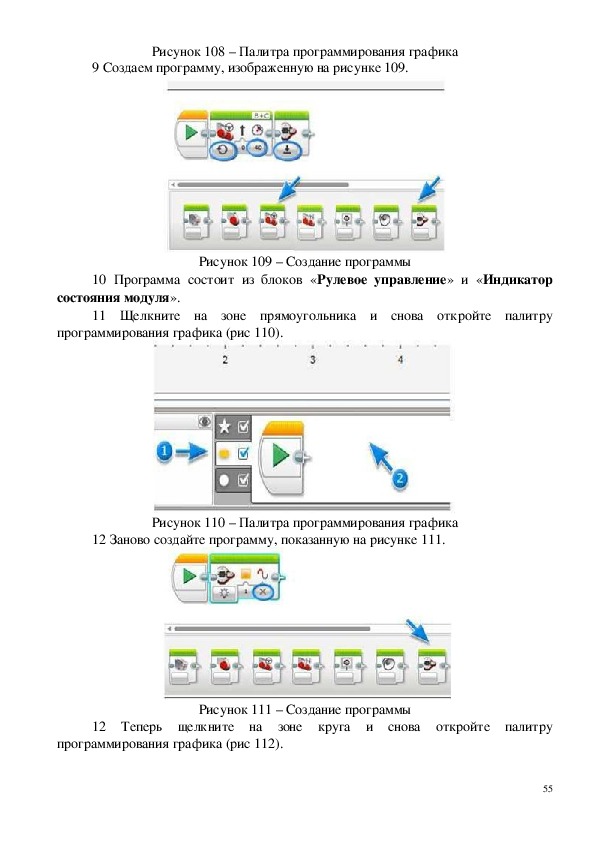
представлено в распечатанном пособии по сборке Lego Mindstorms Education.
4 Для проверки правильности собранного робота запускаем встроенную
программу, которая сохранена на контроллере. Для этого включаем контроллер
зажатием центральной кнопки. После включения высвечивается основное меню
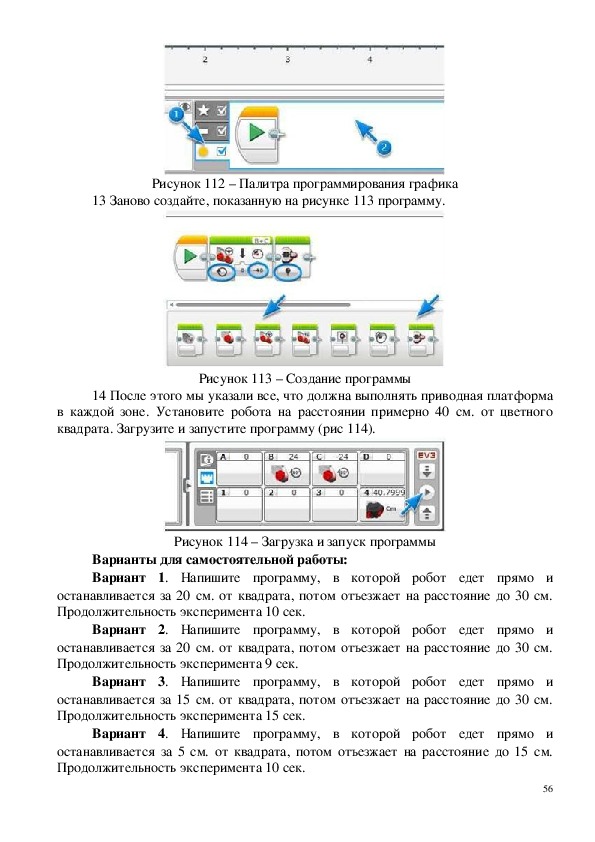
контроллера, изображенное на рисунке 1.
Рисунок 1 – Основное меню контроллера
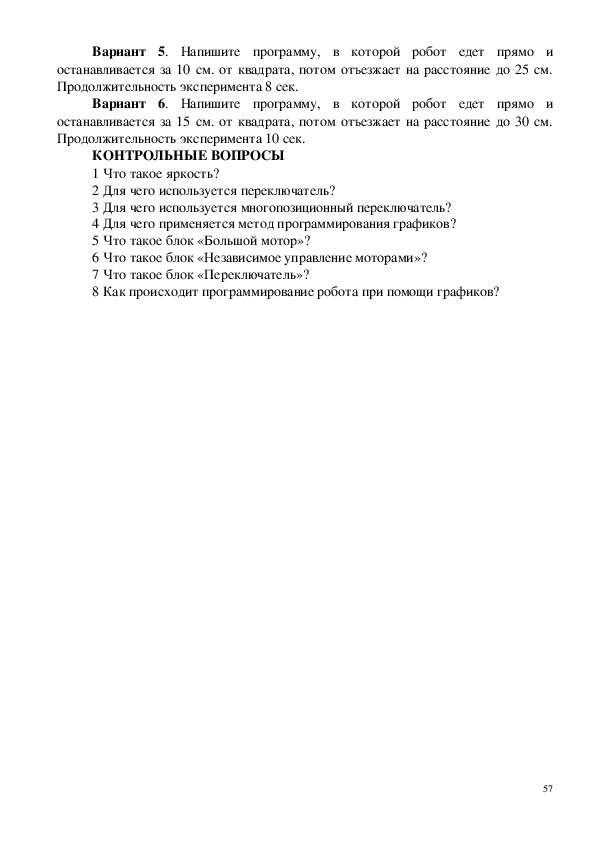
5 Заходим в сохраненные документы (рис 2).
Рисунок 2 – Сохраненные документы
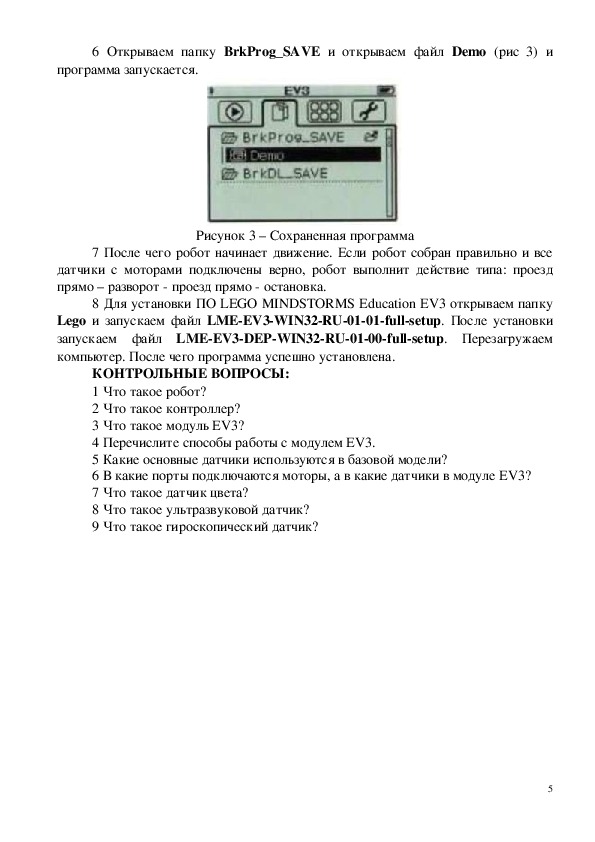
4 6 Открываем папку BrkProg_SAVE и открываем файл Demo (рис 3) и
программа запускается.
Рисунок 3 – Сохраненная программа
7 После чего робот начинает движение. Если робот собран правильно и все
датчики с моторами подключены верно, робот выполнит действие типа: проезд
прямо – разворот проезд прямо остановка.
8 Для установки ПО LEGO MINDSTORMS Education EV3 открываем папку
Lego и запускаем файл LMEEV3WIN32RU0101fullsetup. После установки
запускаем файл LMEEV3DEPWIN32RU0100fullsetup. Перезагружаем
компьютер. После чего программа успешно установлена.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1 Что такое робот?
2 Что такое контроллер?
3 Что такое модуль EV3?
4 Перечислите способы работы с модулем EV3.
5 Какие основные датчики используются в базовой модели?
6 В какие порты подключаются моторы, а в какие датчики в модуле EV3?
7 Что такое датчик цвета?
8 Что такое ультразвуковой датчик?
9 Что такое гироскопический датчик?
5 ПРАКТИЧЕСКАЯ РАБОТА 2
Программирование робота с использованием контроллера
Цель работы:
Краткие теоретические сведения
Большой мотор это мощный мотор, который имеет встроенный датчик
вращения с разрешением 1 градус для точного контроля.
Датчик цвета это цифровой датчик, который может определять цвет или
яркость света, поступающие в небольшое окошко на лицевой части датчика.
Гироскопический датчик это цифровой датчик, который обнаруживает
вращательное движение вокруг одной оси.
Датчик касания это аналоговый датчик, который может определять, когда
красная кнопка нажата, а когда отпущена.
Ультразвуковой датчик это цифровой датчик, который определяет
расстояние до находящегося перед ним объекта.
При помощи составления простых программ управления роботом, можно
получить базовые знания и навыки работы с роботом. Программирование на
контроллере на сегодняшний день является одним из необходимых умений в
работе с роботизированными системами, т.к. почти все современные контроллеры
имеют функцию внутреннего программирования без подключения к компьютеру
оператора/разработчика. Программирование на контроллере позволяет быстро
создавать управляющие программы, устранять недостатки и сбои системы, а также
собирать основную информацию непосредственно с самого контроллера. Это
позволяет уменьшить время реакции на поломку, повысить производительность и
качество рабочих процессов.
Задание 1 Движение по заданной траектории
Цель этого задания состоит в задании роботу условия движения.
Перемещается робот при помощи двух больших сервомоторов. Управление
моторами производится при помощи контроллера, к которому они подсоединены
при помощи кабелей в порты выхода В и С. При помощи такого задания легко
освоить принцип создания алгоритмов по управлению движением робота.
Общую программу задания студенты выполняют в группах по два человека
на одного робота. Самостоятельная работа выполняется каждым индивидуально.
Программа. Движение робота по заданной траектории
Задать роботу траекторию движения в виде вращения на 360° в течении двух
секунд.
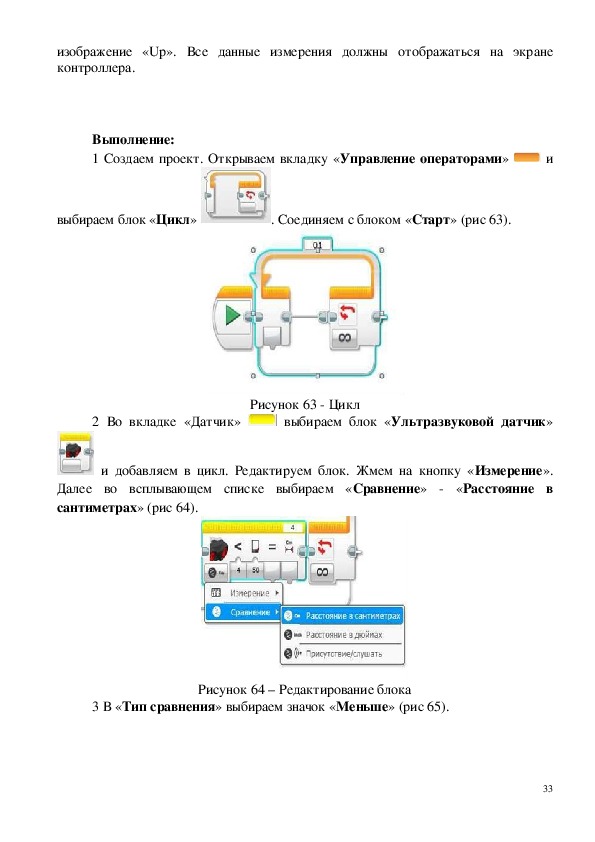
Выполнение:
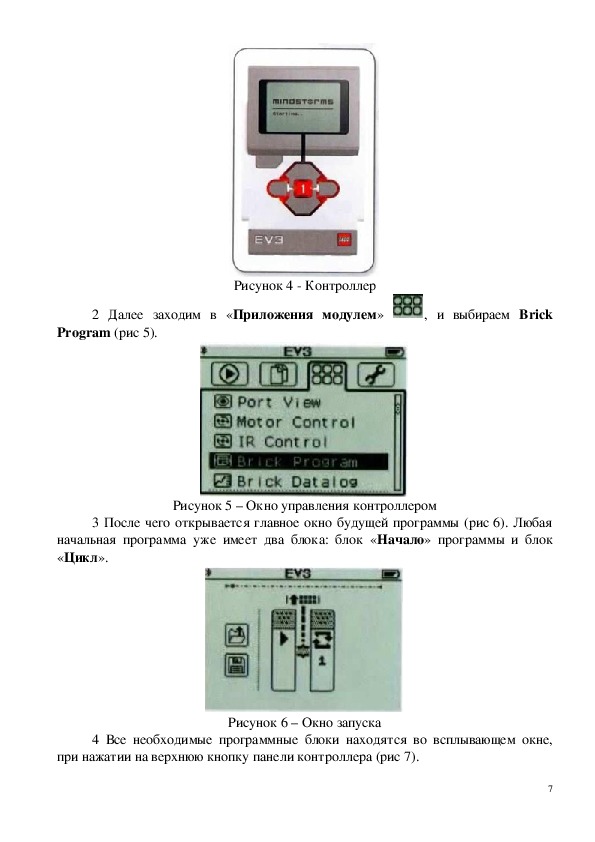
1 Включите контроллер, нажав на центральную кнопку на панели (рис 4).
6 Рисунок 4 Контроллер
2 Далее заходим в «Приложения модулем»
Program (рис 5).
, и выбираем Brick
Рисунок 5 – Окно управления контроллером
3 После чего открывается главное окно будущей программы (рис 6). Любая
начальная программа уже имеет два блока: блок «Начало» программы и блок
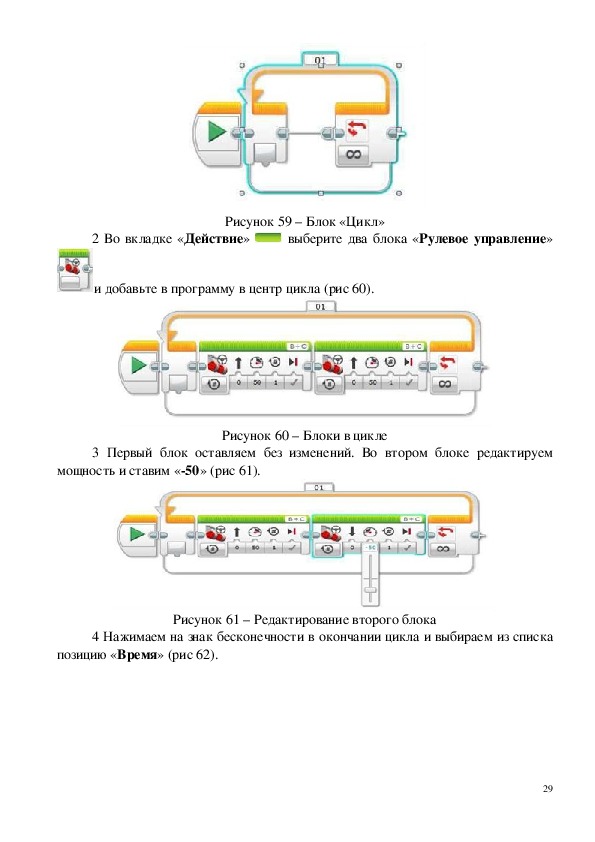
«Цикл».
4 Все необходимые программные блоки находятся во всплывающем окне,
при нажатии на верхнюю кнопку панели контроллера (рис 7).
Рисунок 6 – Окно запуска
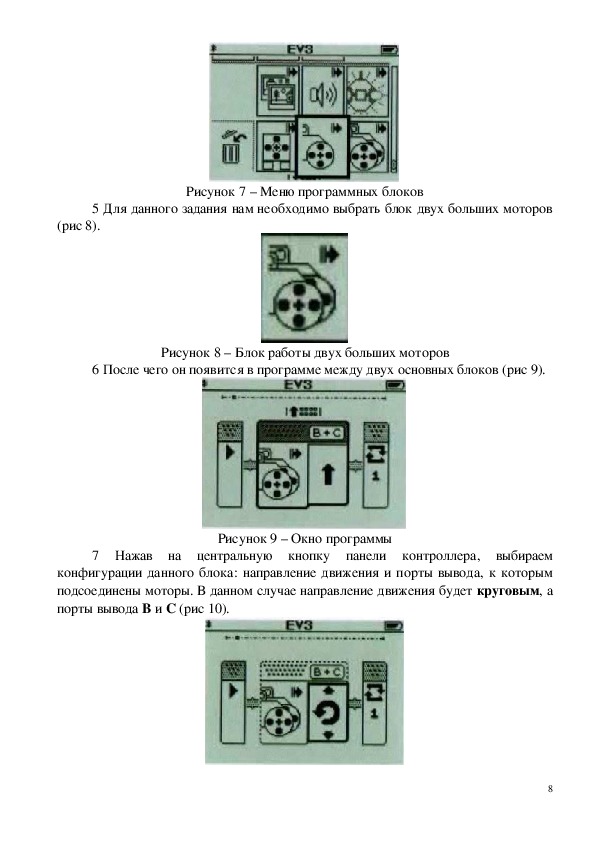
7 Рисунок 7 – Меню программных блоков
5 Для данного задания нам необходимо выбрать блок двух больших моторов
(рис 8).
Рисунок 8 – Блок работы двух больших моторов
6 После чего он появится в программе между двух основных блоков (рис 9).
Рисунок 9 – Окно программы
7 Нажав на центральную кнопку панели контроллера, выбираем
конфигурации данного блока: направление движения и порты вывода, к которым
подсоединены моторы. В данном случае направление движения будет круговым, а
порты вывода В и С (рис 10).
8 Рисунок 10 – Установка кругового движения робота
8 Выходим из настроек блока движения больших моторов нажатием на
правую кнопку на панели контроллера.
9 Задаем время, на протяжении которого будет происходить движение
робота. Заходим в меню программных блоков нажатием на верхнюю кнопку на
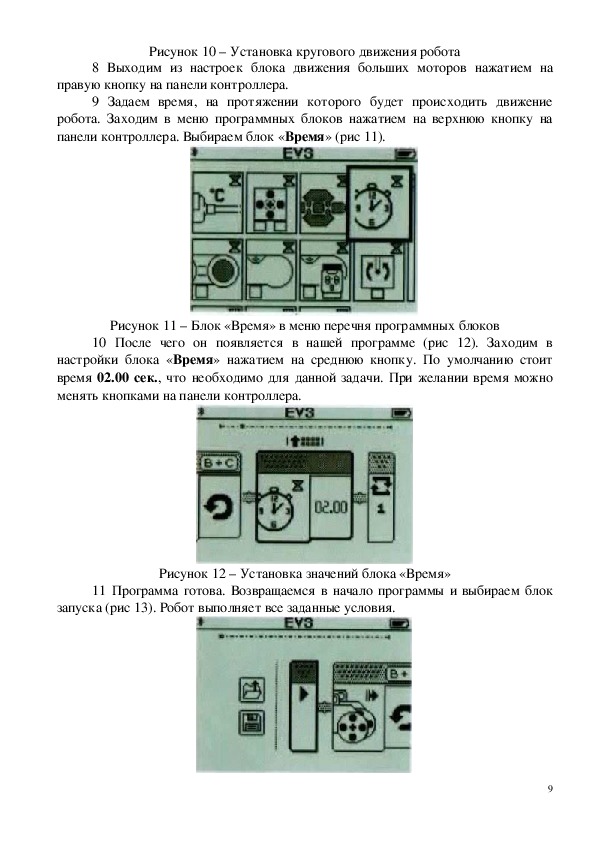
панели контроллера. Выбираем блок «Время» (рис 11).
Рисунок 11 – Блок «Время» в меню перечня программных блоков
10 После чего он появляется в нашей программе (рис 12). Заходим в
настройки блока «Время» нажатием на среднюю кнопку. По умолчанию стоит
время 02.00 сек., что необходимо для данной задачи. При желании время можно
менять кнопками на панели контроллера.
Рисунок 12 – Установка значений блока «Время»
11 Программа готова. Возвращаемся в начало программы и выбираем блок
запуска (рис 13). Робот выполняет все заданные условия.
9 Рисунок 13 – Блок запуска программы
Варианты самостоятельной работы:
Вариант 1. Задать роботу движение типа: вперед 1 сек. поворот направо 1
сек. остановка.
Вариант 2. Задать роботу движение типа: вперед 2 сек. разворот 1 сек.
назад 1 сек.
Вариант 3. Задать роботу движение типа: вперед 1 сек. разворот 1 сек.
назад 1 сек. разворот 1 сек.
Вариант 4. Задать роботу движение типа: назад 1 сек. поворот налево 1
сек. вперед 2 сек.
Вариант 5. Задать роботу движение типа: разворот 1 сек. вперед 2 сек.
поворот направо 1 сек.
Вариант 6. Задать роботу движение типа: вперед 2 сек. разворот 1 сек.
назад 1 сек.
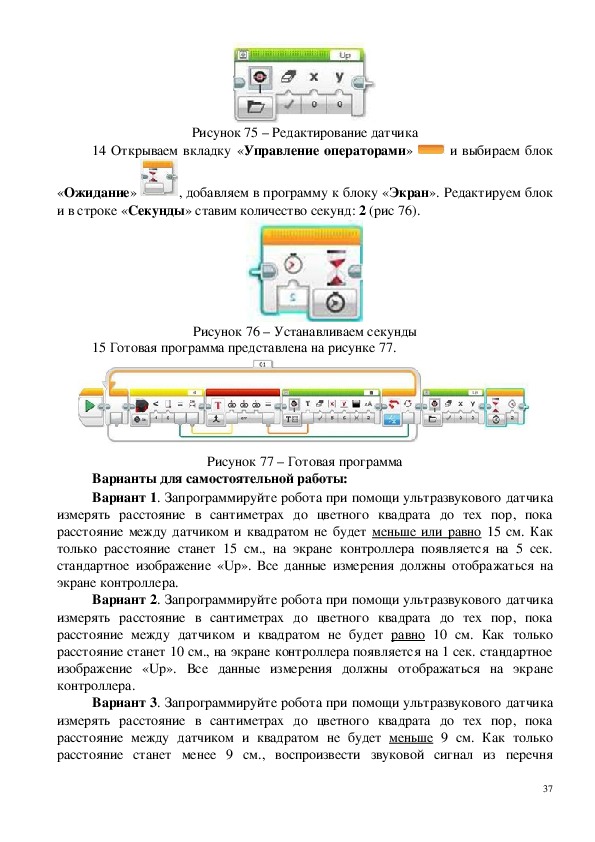
Задание 2 Работа с ультразвуковым датчиком
Цель заключается в освоении этапа программирования ультразвукового
датчика робота.
Ультразвуковой датчик позволяет определять расположение предметов в
пространстве и измерять расстояния до них. Ультразвуковой датчик расстояния
определяет расстояние до объекта, измеряя время отображения звуковой волны от
объекта.
Общую программу студенты выполняют в группах по два человека на одного
робота. Самостоятельная работа выполняется каждым индивидуально.
Программа. Добавление ультразвукового датчика и работа с ним
Робот двигается в прямом направлении до тех пор, пока на пути не
возникнет препятствие в виде любого предмета, в данном задании это цветной
квадрат. Робот должен остановиться за 30 см. до этого предмета.
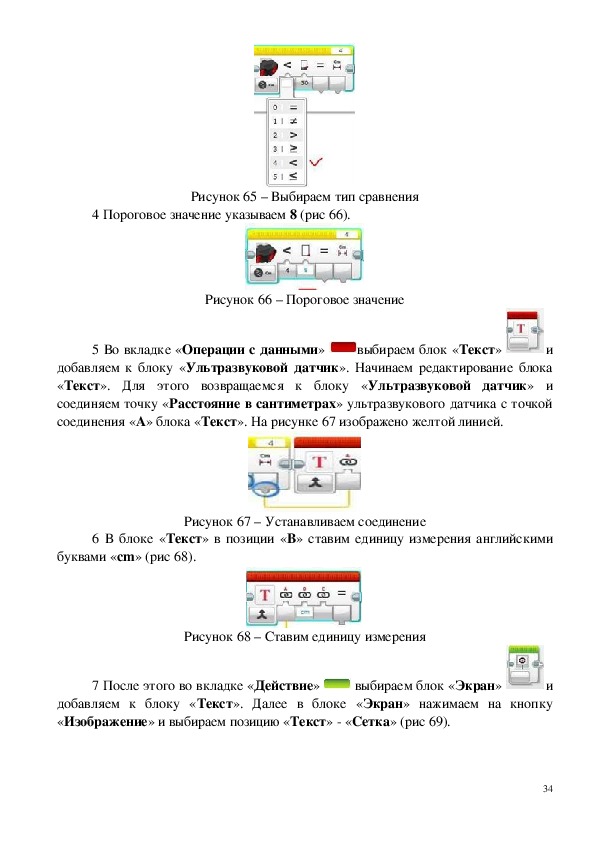
Выполнение:
1 Программа будет состоять из нескольких блоков. Для начала заходим в
«Приложения модуля»
и выбираем Brick Program.
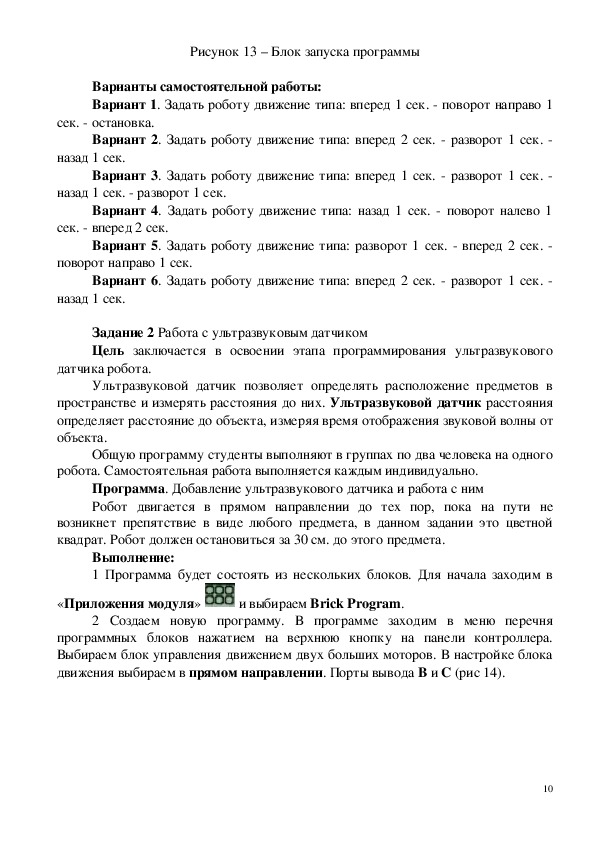
2 Создаем новую программу. В программе заходим в меню перечня
программных блоков нажатием на верхнюю кнопку на панели контроллера.
Выбираем блок управления движением двух больших моторов. В настройке блока
движения выбираем в прямом направлении. Порты вывода В и С (рис 14).
10 Рисунок 14 – Блок моторов
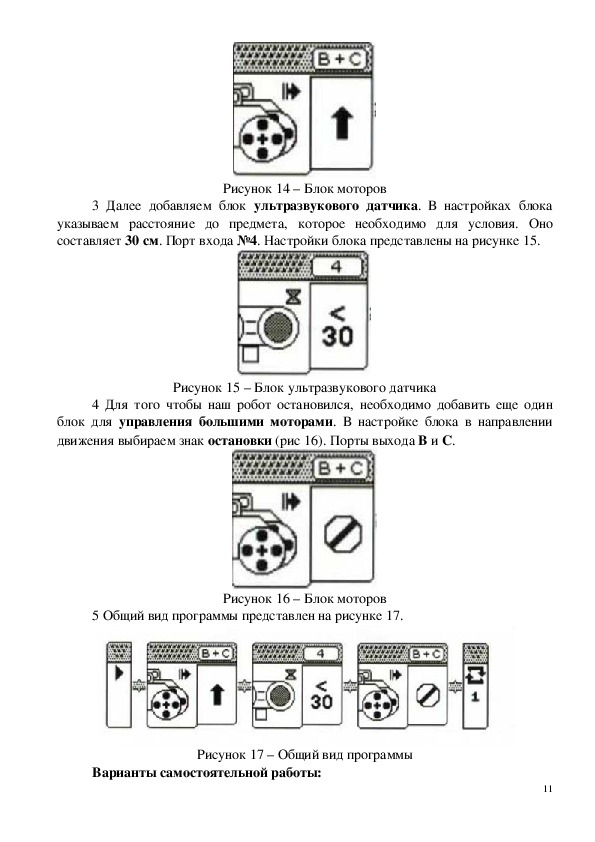
3 Далее добавляем блок ультразвукового датчика. В настройках блока
указываем расстояние до предмета, которое необходимо для условия. Оно
составляет 30 см. Порт входа №4. Настройки блока представлены на рисунке 15.
Рисунок 15 – Блок ультразвукового датчика
4 Для того чтобы наш робот остановился, необходимо добавить еще один
блок для управления большими моторами. В настройке блока в направлении
движения выбираем знак остановки (рис 16). Порты выхода В и С.
5 Общий вид программы представлен на рисунке 17.
Рисунок 16 – Блок моторов
Рисунок 17 – Общий вид программы
Варианты самостоятельной работы:
11 Вариант 1. Задать роботу движение типа: вперед, пока не обнаружит
предмет на расстоянии до 30 см. остановится поворот направо 1 сек.
Вариант 2. Задать роботу движение типа: разворот 1 сек. вперед, пока не
обнаружит предмет на расстоянии до 30 см. остановка.
Вариант 3. Задать роботу движение типа: вперед, пока на обнаружит
предмет на расстоянии до 30 см. остановка поворот налево 1 сек.
Вариант 4. Задать роботу движение типа: вперед, пока не обнаружит
предмет на расстоянии до 30 см. остановка назад 2 сек.
Вариант 5. Задать роботу движение типа: вперед 1 сек. назад 1 сек.
вперед, пока не обнаружит предмет на расстоянии до 30 см. остановка.
Вариант 6. Задать роботу движение типа: вперед, пока не обнаружит
предмет на расстоянии до 10 см. остановка разворот 1 сек. назад 1 сек.
Задание 3 Применение гироскопического датчика в движении робота
Цель заключается в разработке программы, которая поможет легко и быстро
освоить и запрограммировать гироскоп, установленный на корпусе робота.
Гироскоп устройство, способное реагировать на изменение угловой
ориентации тела, на котором оно установлено, относительно инерциальной
системы отсчета.
Общую программу студенты выполняют в группах по два человека на одного
робота. Самостоятельная работа выполняется каждым индивидуально.
Программа.
программирование.
Добавление
гироскопического датчика и его
Робот двигается в прямом направлении 1 сек., поворачивается на 45° и
двигается еще 1 сек. в прямом направлении.
Выполнение:
1 Заходим в «Управление контроллером»
и выбираем Brick Program.
2 Создаем новую программу. В программе заходим в меню программных
блоков нажатием на верхнюю кнопку на панели контроллера. Выбираем блок
управления движением двух больших моторов. В настройке блока движения
выбираем в прямом направлении. Добавляем блок «Время» и задаем значение 1
секунда.
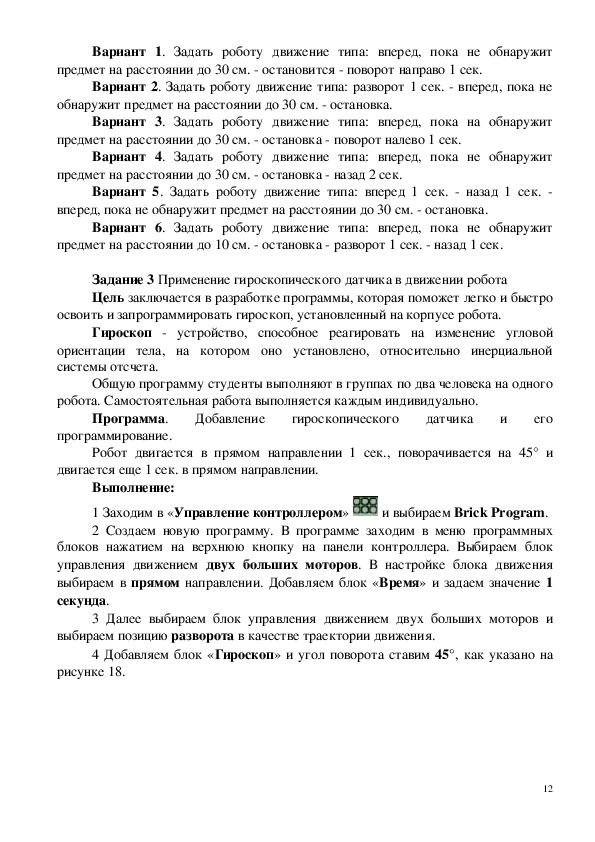
3 Далее выбираем блок управления движением двух больших моторов и
выбираем позицию разворота в качестве траектории движения.
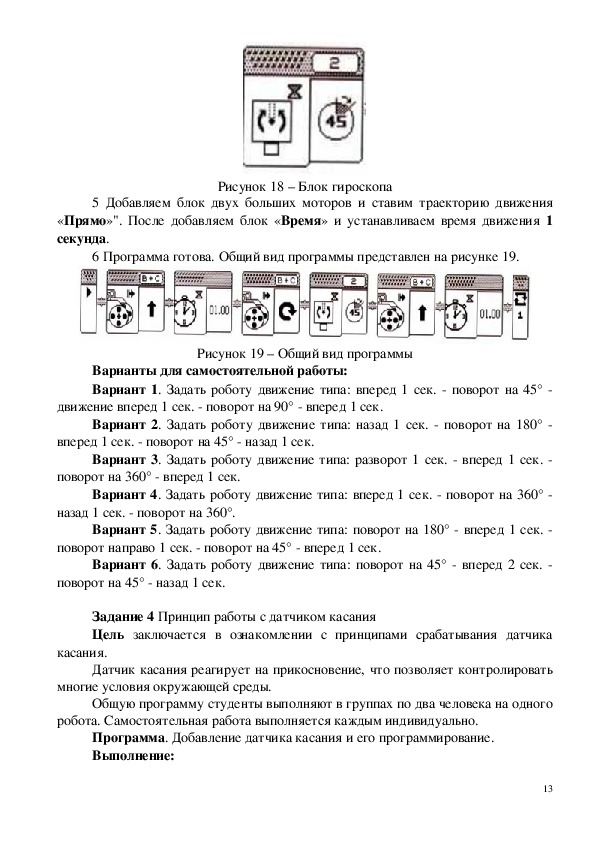
4 Добавляем блок «Гироскоп» и угол поворота ставим 45°, как указано на
рисунке 18.
12 Рисунок 18 – Блок гироскопа
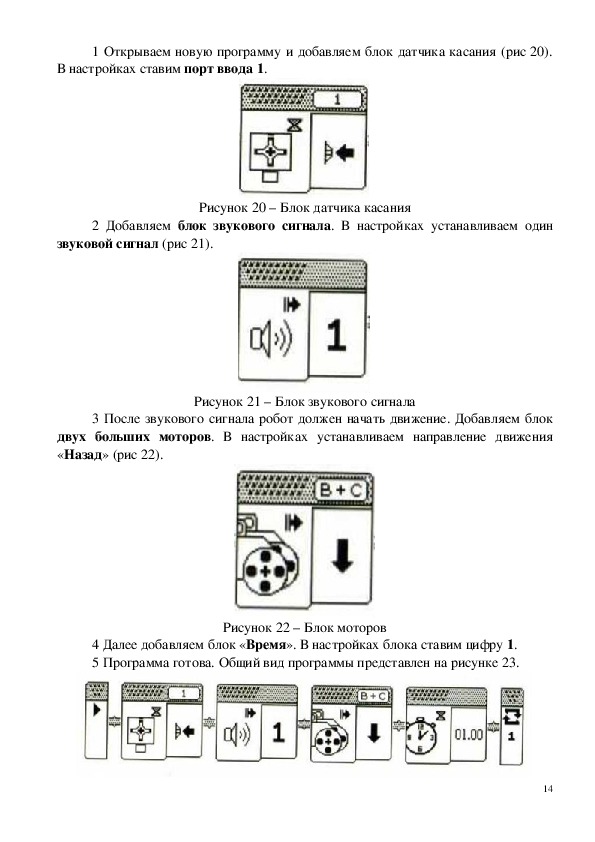
5 Добавляем блок двух больших моторов и ставим траекторию движения
«Прямо»". После добавляем блок «Время» и устанавливаем время движения 1
секунда.
6 Программа готова. Общий вид программы представлен на рисунке 19.
Рисунок 19 – Общий вид программы
Варианты для самостоятельной работы:
Вариант 1. Задать роботу движение типа: вперед 1 сек. поворот на 45°
движение вперед 1 сек. поворот на 90° вперед 1 сек.
Вариант 2. Задать роботу движение типа: назад 1 сек. поворот на 180°
вперед 1 сек. поворот на 45° назад 1 сек.
Вариант 3. Задать роботу движение типа: разворот 1 сек. вперед 1 сек.
поворот на 360° вперед 1 сек.
Вариант 4. Задать роботу движение типа: вперед 1 сек. поворот на 360°
назад 1 сек. поворот на 360°.
Вариант 5. Задать роботу движение типа: поворот на 180° вперед 1 сек.
поворот направо 1 сек. поворот на 45° вперед 1 сек.
Вариант 6. Задать роботу движение типа: поворот на 45° вперед 2 сек.
поворот на 45° назад 1 сек.
Задание 4 Принцип работы с датчиком касания
Цель заключается в ознакомлении с принципами срабатывания датчика
касания.
Датчик касания реагирует на прикосновение, что позволяет контролировать
многие условия окружающей среды.
Общую программу студенты выполняют в группах по два человека на одного
робота. Самостоятельная работа выполняется каждым индивидуально.
Программа. Добавление датчика касания и его программирование.
Выполнение:
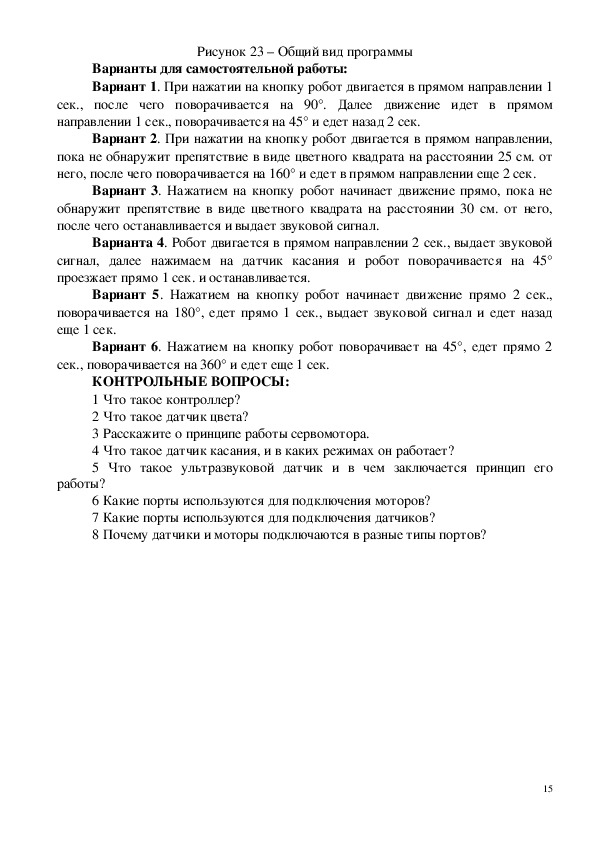
13 1 Открываем новую программу и добавляем блок датчика касания (рис 20).
В настройках ставим порт ввода 1.
Рисунок 20 – Блок датчика касания
2 Добавляем блок звукового сигнала. В настройках устанавливаем один
звуковой сигнал (рис 21).
Рисунок 21 – Блок звукового сигнала
3 После звукового сигнала робот должен начать движение. Добавляем блок
двух больших моторов. В настройках устанавливаем направление движения
«Назад» (рис 22).
Рисунок 22 – Блок моторов
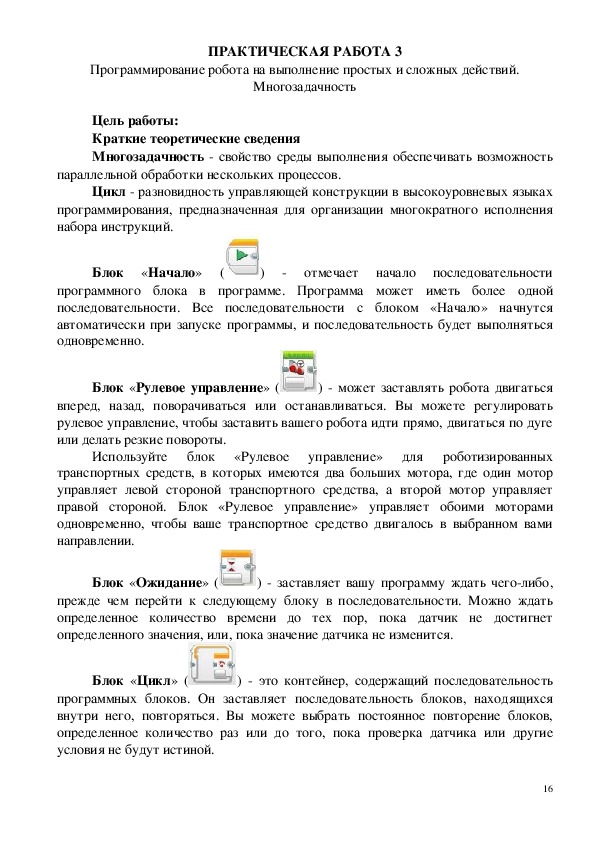
4 Далее добавляем блок «Время». В настройках блока ставим цифру 1.
5 Программа готова. Общий вид программы представлен на рисунке 23.
14 Рисунок 23 – Общий вид программы
Варианты для самостоятельной работы:
Вариант 1. При нажатии на кнопку робот двигается в прямом направлении 1
сек., после чего поворачивается на 90°. Далее движение идет в прямом
направлении 1 сек., поворачивается на 45° и едет назад 2 сек.
Вариант 2. При нажатии на кнопку робот двигается в прямом направлении,
пока не обнаружит препятствие в виде цветного квадрата на расстоянии 25 см. от
него, после чего поворачивается на 160° и едет в прямом направлении еще 2 сек.
Вариант 3. Нажатием на кнопку робот начинает движение прямо, пока не
обнаружит препятствие в виде цветного квадрата на расстоянии 30 см. от него,
после чего останавливается и выдает звуковой сигнал.
Варианта 4. Робот двигается в прямом направлении 2 сек., выдает звуковой
сигнал, далее нажимаем на датчик касания и робот поворачивается на 45°
проезжает прямо 1 сек. и останавливается.
Вариант 5. Нажатием на кнопку робот начинает движение прямо 2 сек.,
поворачивается на 180°, едет прямо 1 сек., выдает звуковой сигнал и едет назад
еще 1 сек.
Вариант 6. Нажатием на кнопку робот поворачивает на 45°, едет прямо 2
сек., поворачивается на 360° и едет еще 1 сек.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1 Что такое контроллер?
2 Что такое датчик цвета?
3 Расскажите о принципе работы сервомотора.
4 Что такое датчик касания, и в каких режимах он работает?
5 Что такое ультразвуковой датчик и в чем заключается принцип его
работы?
6 Какие порты используются для подключения моторов?
7 Какие порты используются для подключения датчиков?
8 Почему датчики и моторы подключаются в разные типы портов?
15 Программирование робота на выполнение простых и сложных действий.
ПРАКТИЧЕСКАЯ РАБОТА 3
Многозадачность
Цель работы:
Краткие теоретические сведения
Многозадачность свойство среды выполнения обеспечивать возможность
параллельной обработки нескольких процессов.
Цикл разновидность управляющей конструкции в высокоуровневых языках
программирования, предназначенная для организации многократного исполнения
набора инструкций.
Блок «Начало» (
) отмечает начало последовательности
программного блока в программе. Программа может иметь более одной
последовательности. Все последовательности с блоком «Начало» начнутся
автоматически при запуске программы, и последовательность будет выполняться
одновременно.
Блок «Рулевое управление» (
) может заставлять робота двигаться
вперед, назад, поворачиваться или останавливаться. Вы можете регулировать
рулевое управление, чтобы заставить вашего робота идти прямо, двигаться по дуге
или делать резкие повороты.
Используйте блок «Рулевое управление» для роботизированных
транспортных средств, в которых имеются два больших мотора, где один мотор
управляет левой стороной транспортного средства, а второй мотор управляет
правой стороной. Блок «Рулевое управление» управляет обоими моторами
одновременно, чтобы ваше транспортное средство двигалось в выбранном вами
направлении.
Блок «Ожидание» (
) заставляет вашу программу ждать чеголибо,
прежде чем перейти к следующему блоку в последовательности. Можно ждать
определенное количество времени до тех пор, пока датчик не достигнет
определенного значения, или, пока значение датчика не изменится.
Блок «Цикл» (
) это контейнер, содержащий последовательность
программных блоков. Он заставляет последовательность блоков, находящихся
внутри него, повторяться. Вы можете выбрать постоянное повторение блоков,
определенное количество раз или до того, пока проверка датчика или другие
условия не будут истиной.
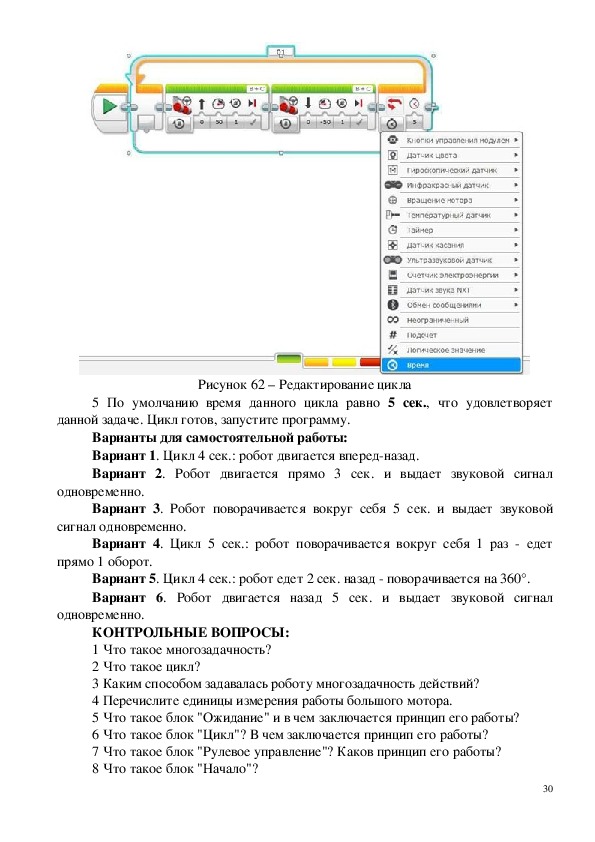
16 Повторяются только блоки, находящиеся внутри цикла. После окончания
цикла программа продолжит с блоками, находящимися за пределами цикла.
Задание 1 Простые действия робота
Цель заключается в освоении простых действий в программировании и
построении программных блоков.
Задание содержит две общие программы и программы для самостоятельной
работы.
Студенты делятся на группы по два человека и выполняют 2 программы.
После выполнения двух общих программ, студенты берут в соответствии со своим
вариантом задание и выполняют его индивидуально.
Программа 1. Перемещение по прямой линии
Этой программой робот будет двигаться по прямой линии вперед и назад.
Работа моторов будет измеряться тремя единицами: количеством оборотов,
количеством секунд и количеством градусов.
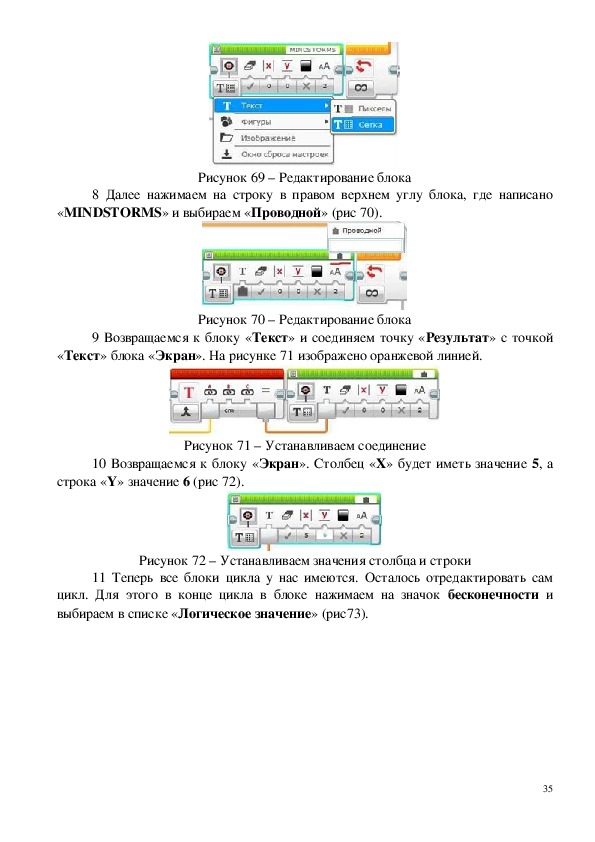
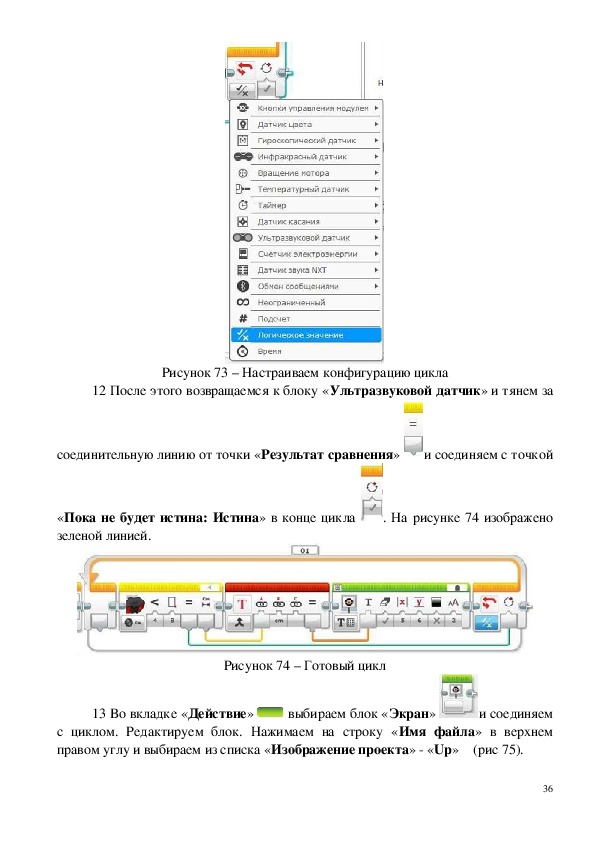
Выполнение:
1 Прежде чем открыть новый проект, запускаем программу LEGO
MINDSORMS Education EV3. Ярлык
находится на рабочем столе.
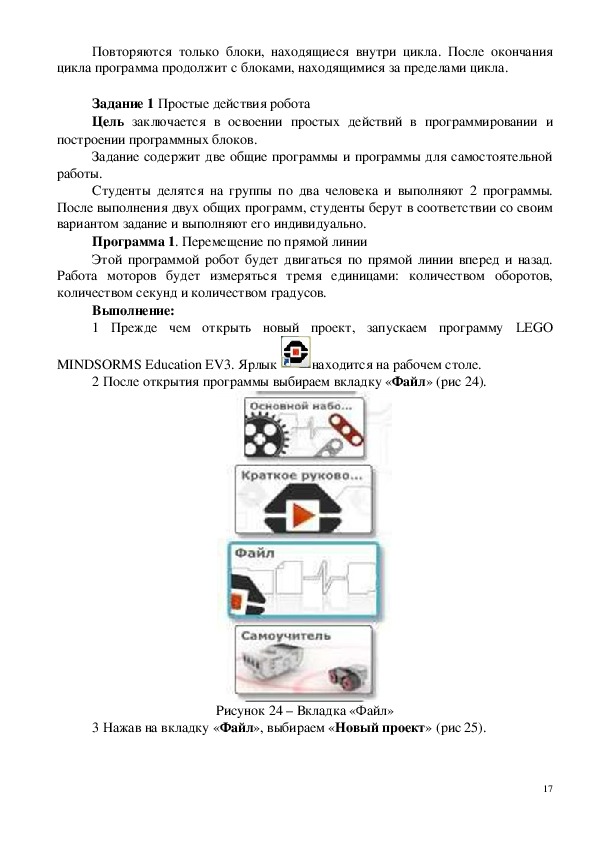
2 После открытия программы выбираем вкладку «Файл» (рис 24).
3 Нажав на вкладку «Файл», выбираем «Новый проект» (рис 25).
Рисунок 24 – Вкладка «Файл»
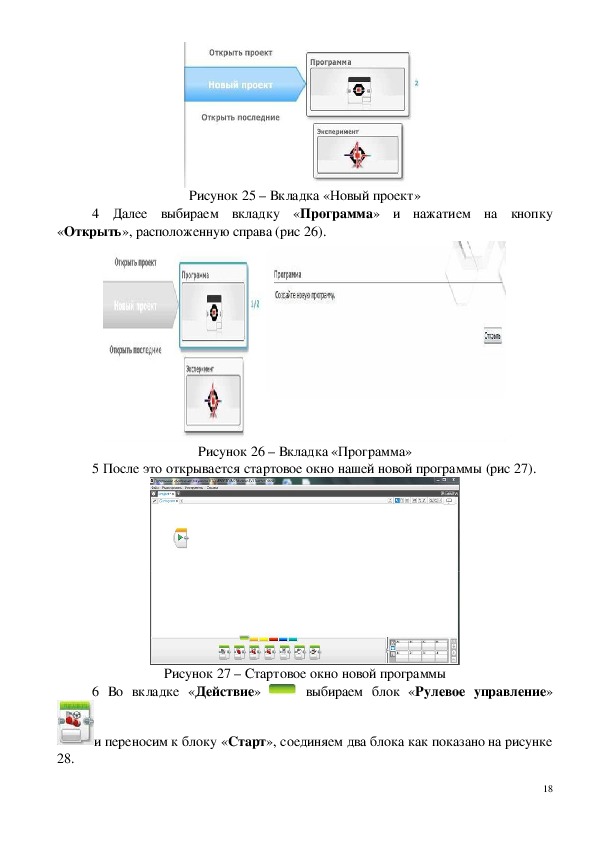
17 Рисунок 25 – Вкладка «Новый проект»
4 Далее выбираем вкладку «Программа» и нажатием на кнопку
«Открыть», расположенную справа (рис 26).
5 После это открывается стартовое окно нашей новой программы (рис 27).
Рисунок 26 – Вкладка «Программа»
Рисунок 27 – Стартовое окно новой программы
6 Во вкладке «Действие»
выбираем блок «Рулевое управление»
и переносим к блоку «Старт», соединяем два блока как показано на рисунке
28.
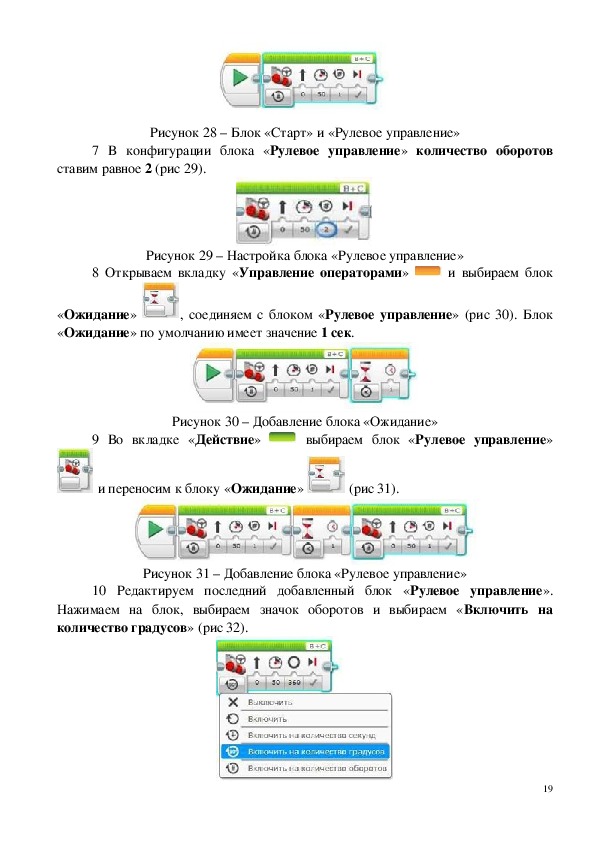
18 Рисунок 28 – Блок «Старт» и «Рулевое управление»
7 В конфигурации блока «Рулевое управление» количество оборотов
ставим равное 2 (рис 29).
Рисунок 29 – Настройка блока «Рулевое управление»
8 Открываем вкладку «Управление операторами»
и выбираем блок
«Ожидание»
«Ожидание» по умолчанию имеет значение 1 сек.
, соединяем с блоком «Рулевое управление» (рис 30). Блок
Рисунок 30 – Добавление блока «Ожидание»
9 Во вкладке «Действие»
выбираем блок «Рулевое управление»
и переносим к блоку «Ожидание»
(рис 31).
Рисунок 31 – Добавление блока «Рулевое управление»
10 Редактируем последний добавленный блок «Рулевое управление».
Нажимаем на блок, выбираем значок оборотов и выбираем «Включить на
количество градусов» (рис 32).
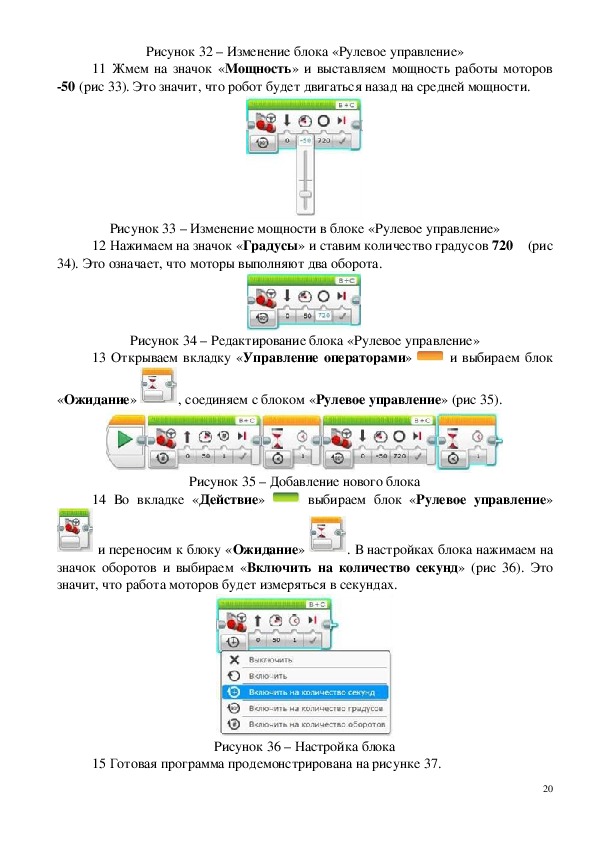
19 Рисунок 32 – Изменение блока «Рулевое управление»
11 Жмем на значок «Мощность» и выставляем мощность работы моторов
50 (рис 33). Это значит, что робот будет двигаться назад на средней мощности.
Рисунок 33 – Изменение мощности в блоке «Рулевое управление»
12 Нажимаем на значок «Градусы» и ставим количество градусов 720 (рис
34). Это означает, что моторы выполняют два оборота.
Рисунок 34 – Редактирование блока «Рулевое управление»
13 Открываем вкладку «Управление операторами»
и выбираем блок
«Ожидание»
, соединяем с блоком «Рулевое управление» (рис 35).
Рисунок 35 – Добавление нового блока
14 Во вкладке «Действие»
выбираем блок «Рулевое управление»
и переносим к блоку «Ожидание»
. В настройках блока нажимаем на
значок оборотов и выбираем «Включить на количество секунд» (рис 36). Это
значит, что работа моторов будет измеряться в секундах.
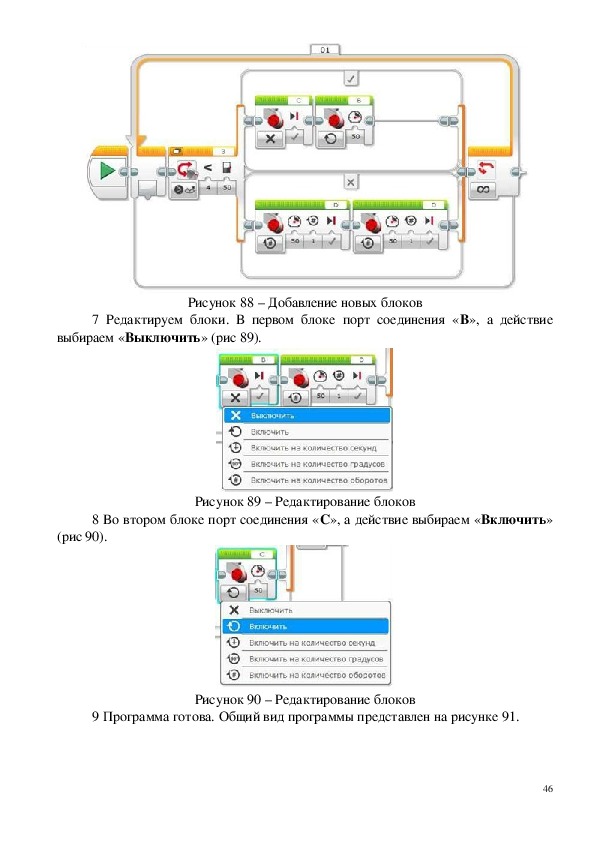
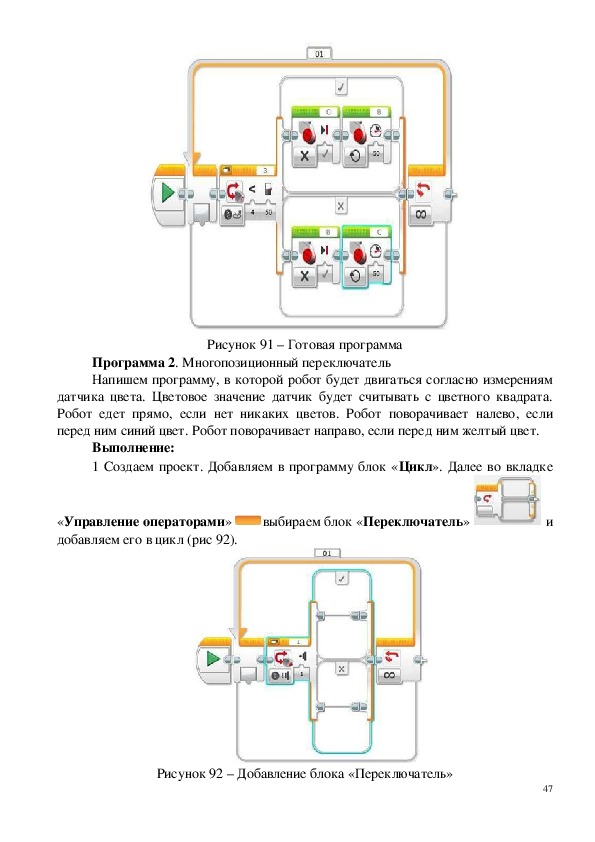
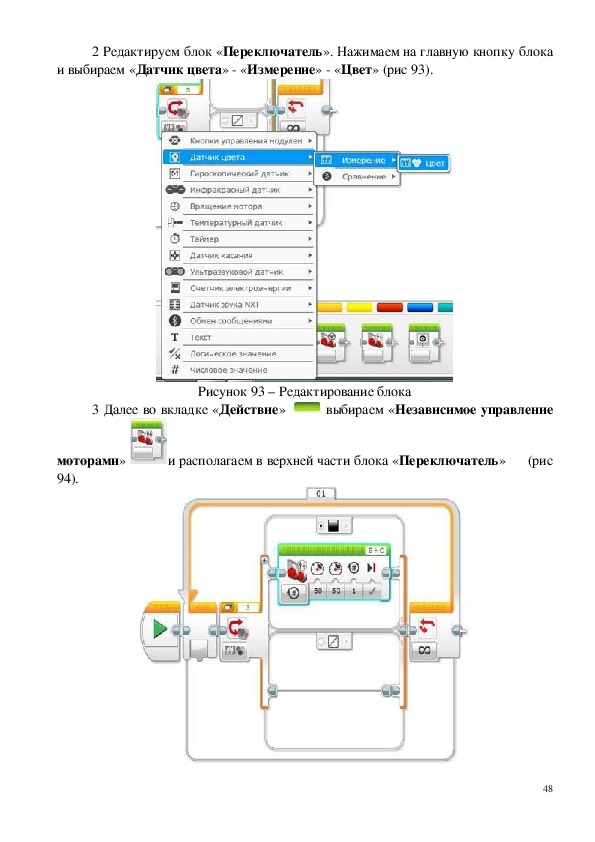
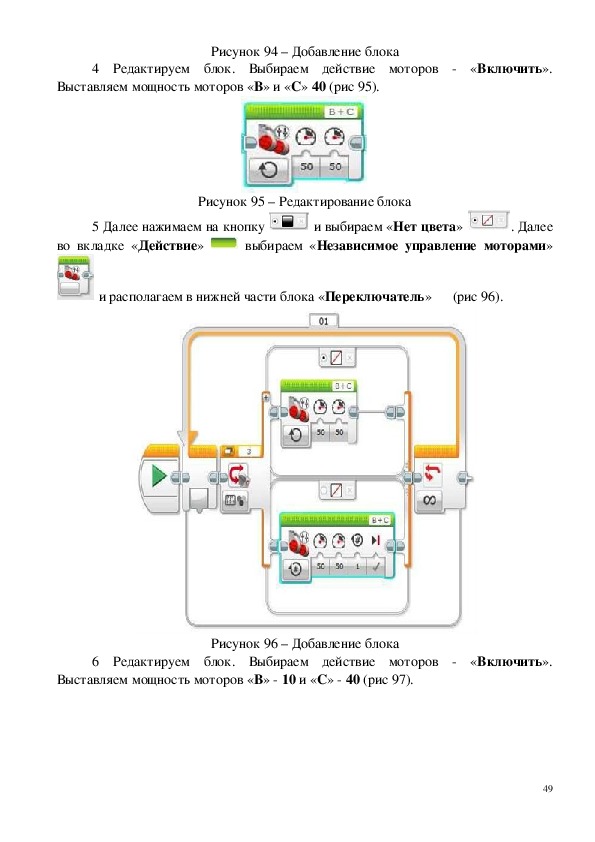
15 Готовая программа продемонстрирована на рисунке 37.
Рисунок 36 – Настройка блока
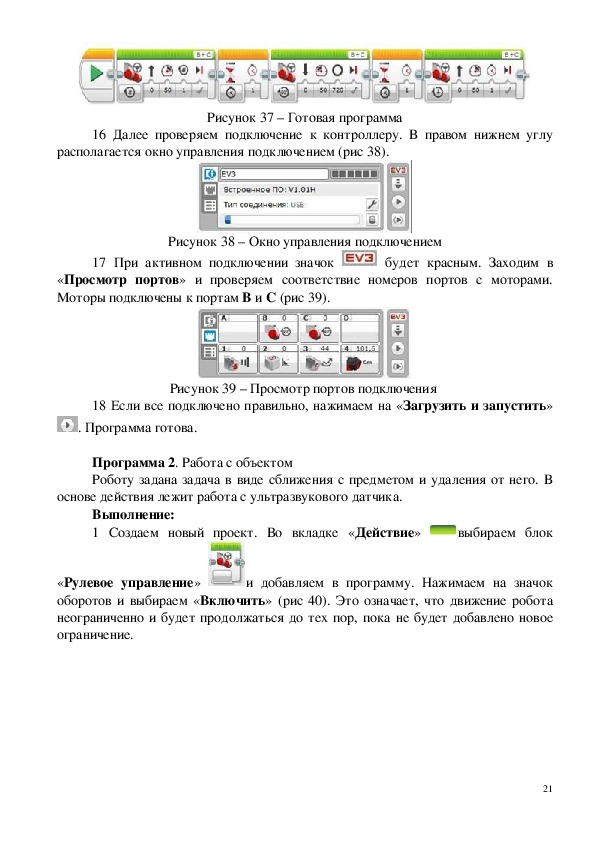
20 Рисунок 37 – Готовая программа
16 Далее проверяем подключение к контроллеру. В правом нижнем углу
располагается окно управления подключением (рис 38).
Рисунок 38 – Окно управления подключением
17 При активном подключении значок
будет красным. Заходим в
«Просмотр портов» и проверяем соответствие номеров портов с моторами.
Моторы подключены к портам В и С (рис 39).
Рисунок 39 – Просмотр портов подключения
18 Если все подключено правильно, нажимаем на «Загрузить и запустить»
. Программа готова.
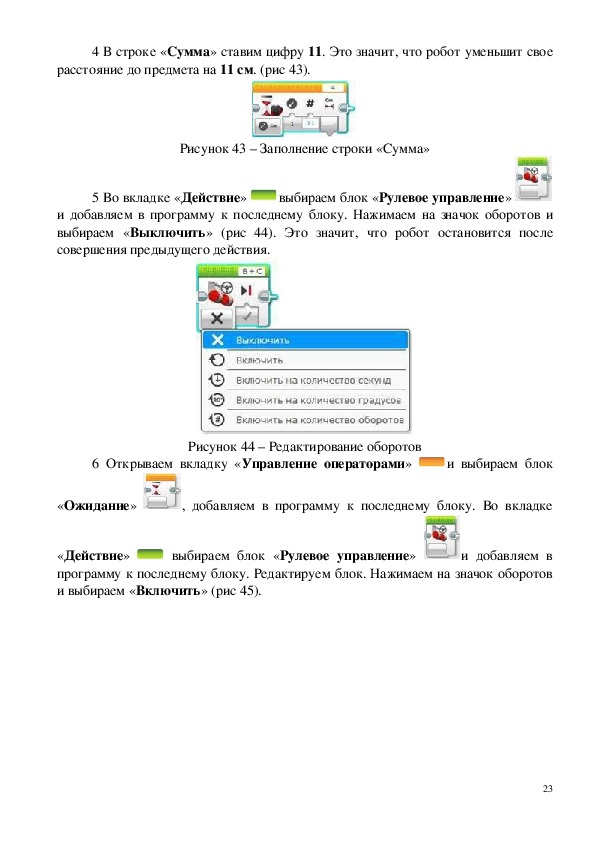
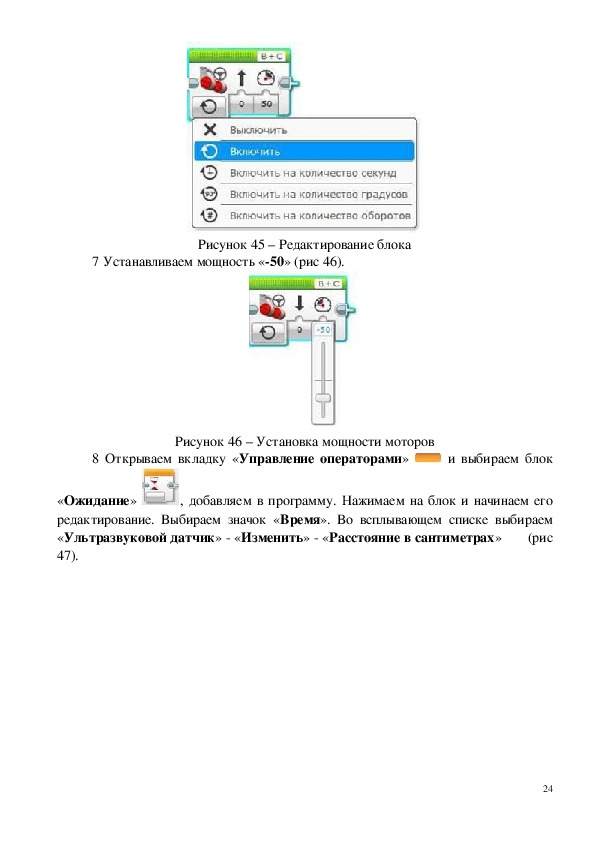
Программа 2. Работа с объектом
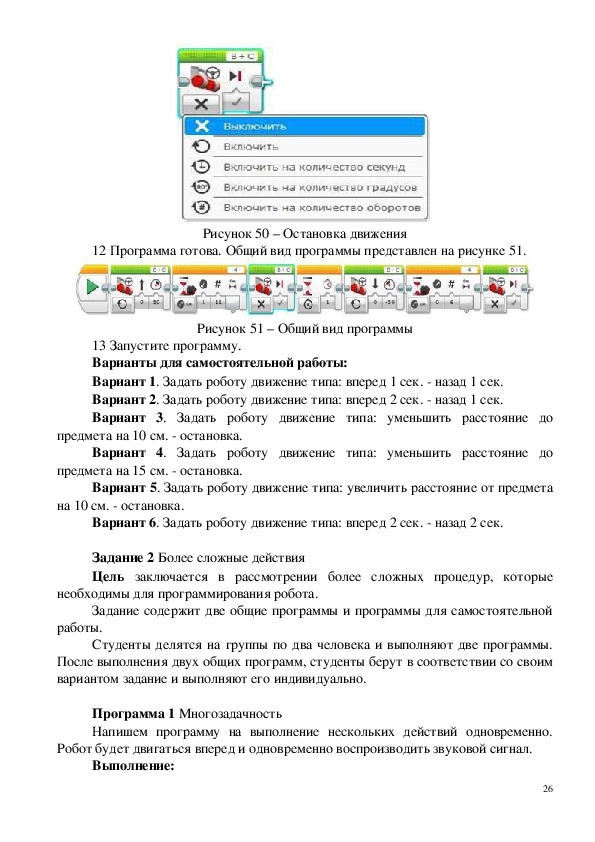
Роботу задана задача в виде сближения с предметом и удаления от него. В
основе действия лежит работа с ультразвукового датчика.
Выполнение:
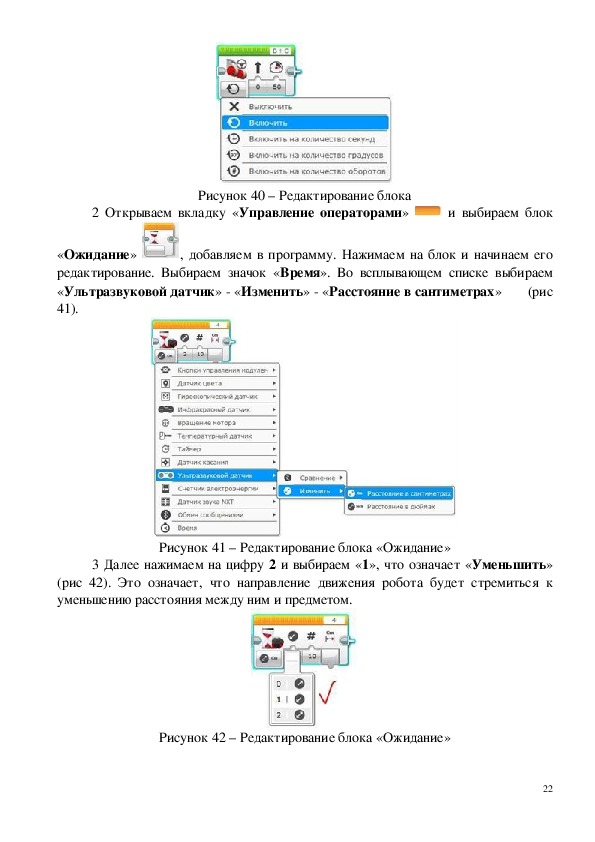
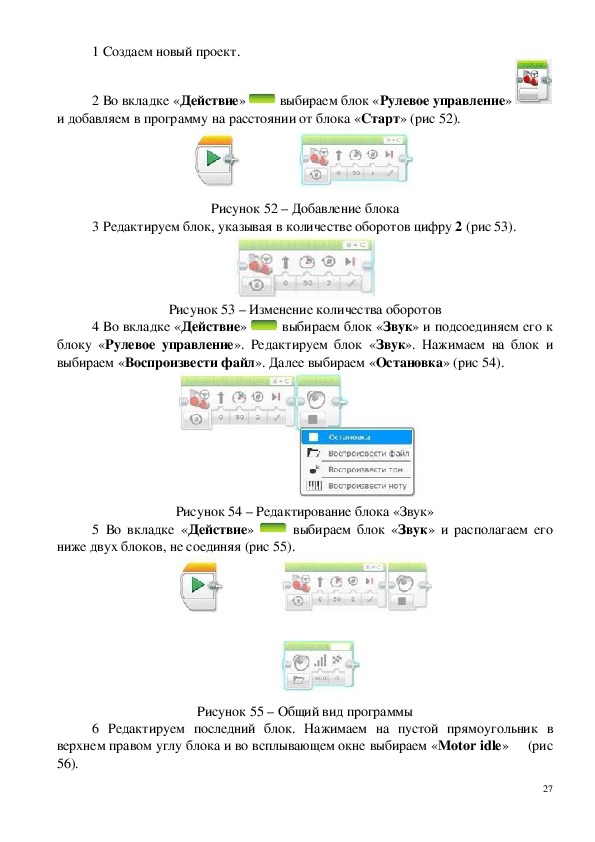
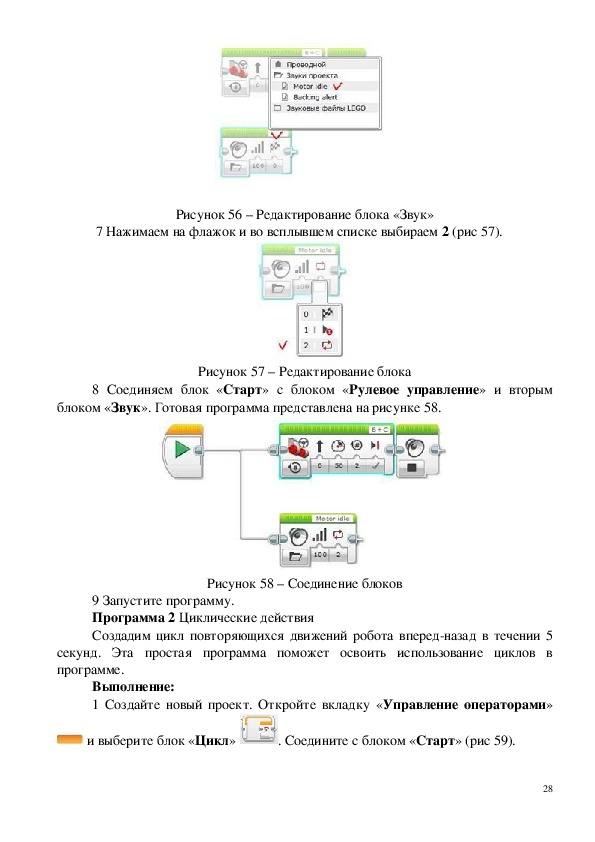
1 Создаем новый проект. Во вкладке «Действие»
выбираем блок
«Рулевое управление»
и добавляем в программу. Нажимаем на значок
оборотов и выбираем «Включить» (рис 40). Это означает, что движение робота
неограниченно и будет продолжаться до тех пор, пока не будет добавлено новое
ограничение.
21
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)

Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Программа учебной практики по ПМ01 по специальности 15.02.11 (1 курс)
Материалы на данной страницы взяты из открытых истончиков либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
10.09.2019
Посмотрите также:
© ООО «Знанио»
С вами с 2009 года.
![]()
О портале