Поделиться

Радиоуправляемый робот на базе платформы Arduino, своими руками Используя arduino можно самостоятельно изготовить сложную систему радиоуправления не затрачивая, при этом, много усилий. Для популярной, на данный момент, платформы arduino существует огромное количество модулей расширяющих возможности данной платформы.
Это первый роботизированный проект, который я когда-либо делал, и если вы никогда не пробовали собрать робота, то, скорее всего, думаете, что это сложно.
Данная работа рассматривает основные принципы построения робототехники и имеет практический характер. В этой статье вы найдете подробную инструкцию как сделать продвинутый автомобиль Arduino Car своими руками, с питанием, датчиками линии, расстояния и управлении через bluetooth.
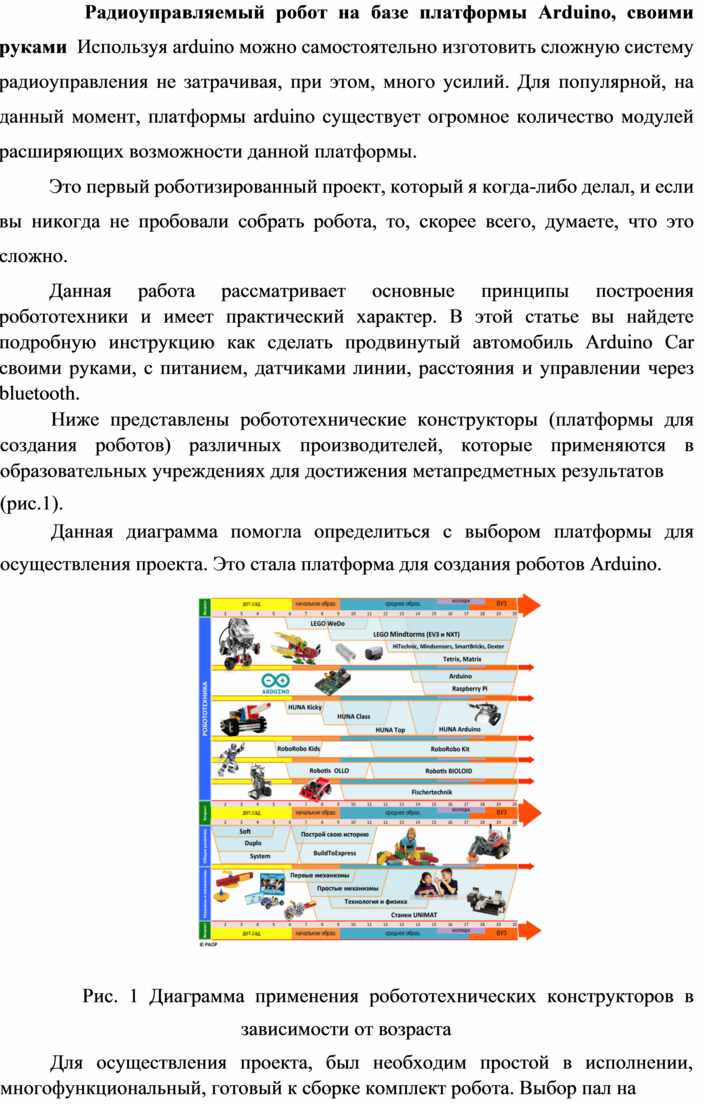
Ниже представлены робототехнические конструкторы (платформы для создания роботов) различных производителей, которые применяются в образовательных учреждениях для достижения метапредметных результатов
(рис.1).
Данная диаграмма помогла определиться с выбором платформы для осуществления проекта. Это стала платформа для создания роботов Arduino.
Рис. 1 Диаграмма применения робототехнических конструкторов в зависимости от возраста
Для осуществления проекта, был необходим простой в исполнении, многофункциональный, готовый к сборке комплект робота. Выбор пал на четырехколесного робота (рис.2). Заказывал на Алиэкспресс в «максимальной» комплектации, с бесплатной доставкой – вышло около 3000 руб.

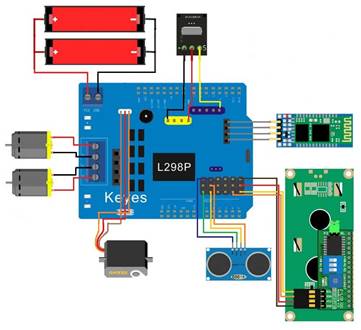
Судя по описанию из этого набора частей, должно получиться «чудо» способное слушать команды от пульта дистанционного управления, от смартфона по Bluetooth, уметь ездить по полосе и само определять препятствия – с помощью сонара (схема 3).

Вот, что пришло. Экспликация элементов комплекта четырехколесного робота Arduino. Итак, в наличии (Рис. 4):

Рис.4 Комплект конструктора четырёхколёсного робота на базе платформы Arduino
|
№ пп |
наименование |
колво, шт. |
описание |
фотография |
|
1 |
Плата Arduino UNO R3 |
1 |
Arduino UNO R3, в отличие от предыдущих версий, не использует для подключения к компьютеру мост USB-UART FTDI. Эту функцию в нем выполняет микроконтроллер ATmega16U2. 14 цифровых и 6 аналоговых пинов позволяют подключать разнообразные датчики, светодиоды, двигатели и другие внешние устройства. USB-разъем поможет подключиться к компьютеру для перепрошивки скетча без дополнительных внешних устройств. Встроенный стабилизатор позволяет использовать различные элементы питания с широким диапазоном напряжения, от 6-7 до 12-14 В. В Arduino Uno достаточно удобно реализована работа с популярными протоколами: UART, SPI, I2C. |
|
|
2 |
Плата L298P Motor Shield |
1 |
Плата расширения драйвера двигателей постоянного тока- L298P Motor Shield. Непосредственно управляет двумя парами двигателями постоянного тока. Позволяет использовать цифровой интерфейс ввода/вывода без дополнительных сложных схем подключения. На плате установлен зуммер (для формирования аварийных сигналов), удобный интерфейс подключения |
|
|
|
|
|
двигателей. |
|
|
3 |
Ультразвуков ой дальномер HC-SR04 Ultrasonic Module Distance Measuring Sensor. |
1 |
Ультразвуковой дальномер рассчитан на определение расстояния до объектов в радиусе четырёх метров. Работа модуля основана на принципе эхолокации. Модуль посылает ультразвуковой сигнал и принимает его отражение от объекта. Измерив время между отправкой и получением импульса, не сложно вычислить расстояние до препятствия. |
|
|
4 |
Модуль Line inductive module |
1 |
Модуль слежения за полосой включает 3 датчика. Датчики отслеживают белые линии на темном фоне и черные линии на светлом фоне. Модуль обеспечивает движение робота по полосе. |
|
|
5 |
Комплект ИК HX1838 Infrared Remote Control Module |
1 |
ИК приемник и инфракрасный пульт дистанционного управления – самый распространенный и простой способ управления электронной аппаратурой. Инфракрасный спектр излучения не виден человеческим глазом, но он отлично принимается ИК приемниками, которые встроены в электронные приборы. Дальность действия 5-8м. |
|
|
6 |
Модуль— HC-06 wireless Bluetooth |
1 |
С HC-06 можно управлять роботом прямо со своего смартфона. Поставив на телефон или планшет одну из программ для управления через bluetooth, можно превратить его в настоящий джойстик, и робот будет послушно поворачивать вслед за поворотом смартфона. Точно так же, можно связаться со своим устройством с ноутбука, или с любого другого прибора, который может подключаться к bluetoothустройствам. |
|
|
7 |
Сервопривод SG-90 TOWER |
1 |
Используется в основном для управления небольшими легкими механизмами, угол поворота которых ограничен диапазоном от 0 до 180 градусов. |
|
• Отвертки;
• Ножницы;
• Паяльник;
• Олово, канифоль, паяльная кислота;
• Двухсторонний скотч.
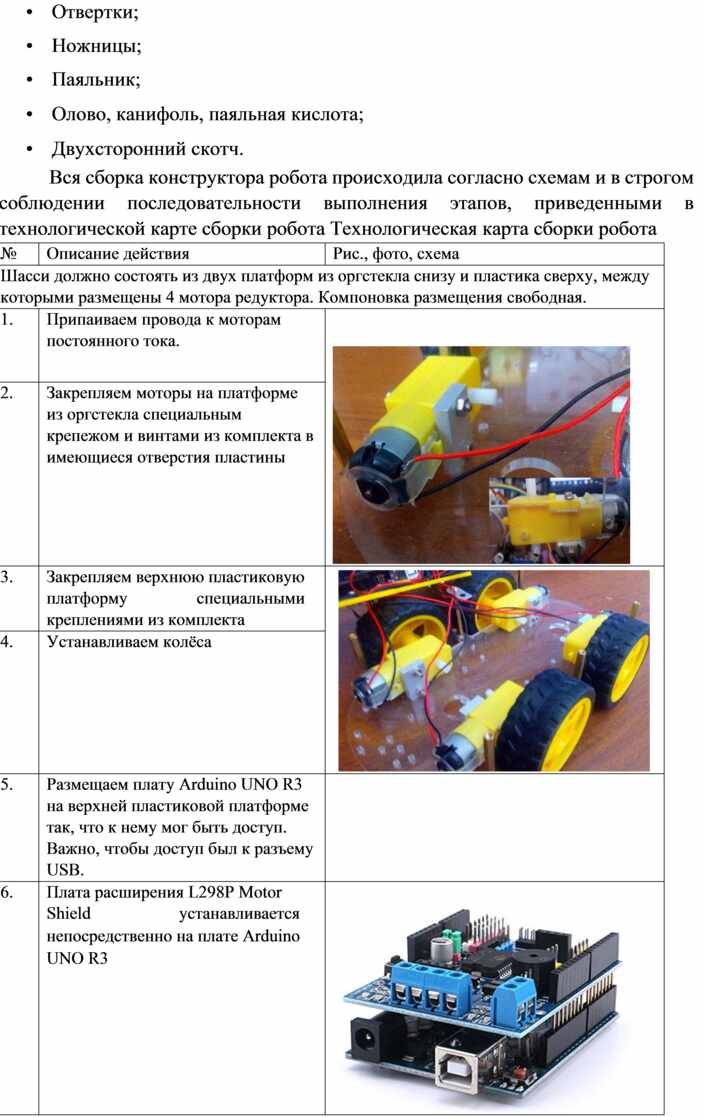
Вся сборка конструктора робота происходила согласно схемам и в строгом соблюдении последовательности выполнения этапов, приведенными в технологической карте сборки робота Технологическая карта сборки робота
|
№ |
Описание действия |
Рис., фото, схема |
|
Шасси должно состоять из двух платформ из оргстекла снизу и пластика сверху, между которыми размещены 4 мотора редуктора. Компоновка размещения свободная. |
||
|
1. |
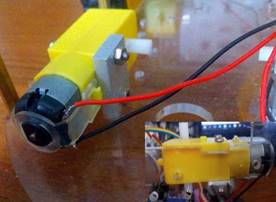
Припаиваем провода к моторам постоянного тока. |
|
|
2. |
Закрепляем моторы на платформе из оргстекла специальным крепежом и винтами из комплекта в имеющиеся отверстия пластины |
|
|
3. |
Закрепляем верхнюю пластиковую платформу специальными креплениями из комплекта |
|
|
4. |
Устанавливаем колёса |
|
|
5. |
Размещаем плату Arduino UNO R3 на верхней пластиковой платформе так, что к нему мог быть доступ. Важно, чтобы доступ был к разъему USB. |
|
|
6. |
Плата расширения L298P Motor Shield устанавливается непосредственно на плате Arduino UNO R3
|
|
|
7. |
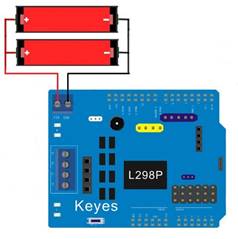
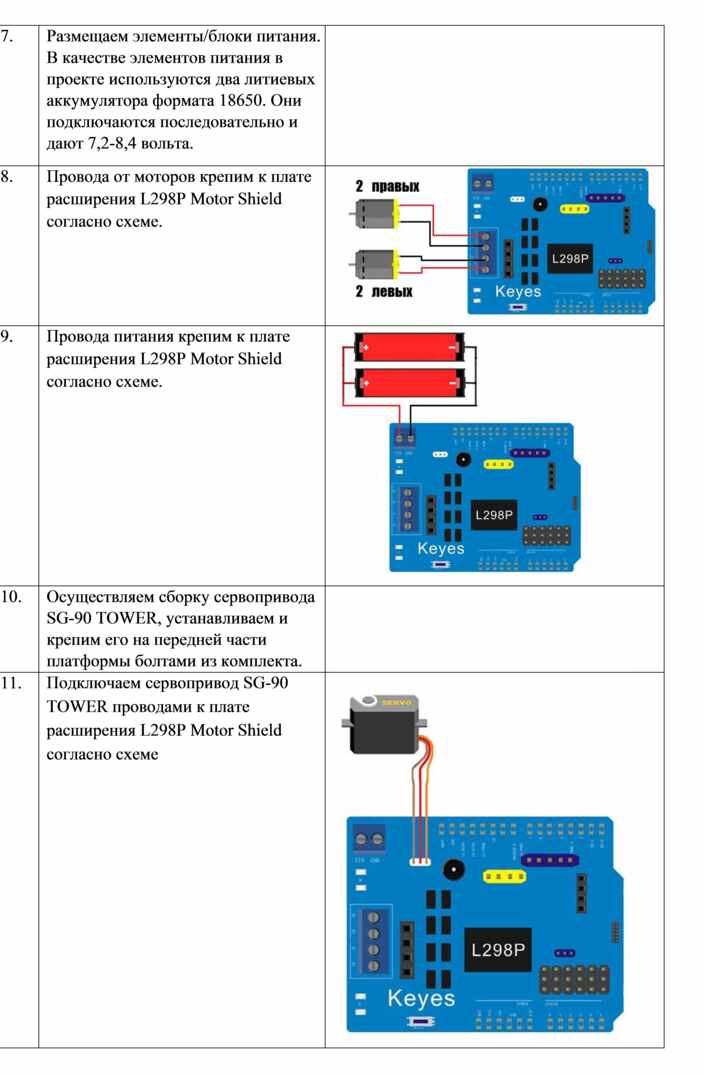
Размещаем элементы/блоки питания. В качестве элементов питания в проекте используются два литиевых аккумулятора формата 18650. Они подключаются последовательно и дают 7,2-8,4 вольта. |
|
|
8. |
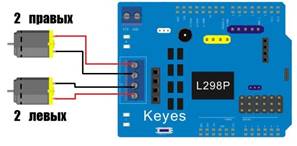
Провода от моторов крепим к плате расширения L298P Motor Shield согласно схеме.
|
|
|
9. |
Провода питания крепим к плате расширения L298P Motor Shield согласно схеме.
|
|
|
10. |
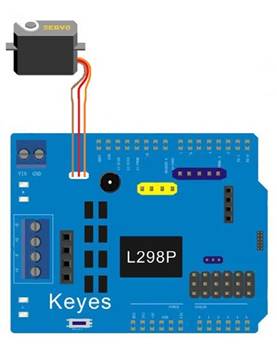
Осуществляем сборку сервопривода SG-90 TOWER, устанавливаем и крепим его на передней части платформы болтами из комплекта. |
|
|
11. |
Подключаем сервопривод SG-90 TOWER проводами к плате расширения L298P Motor Shield согласно схеме
|
|
|
12. |
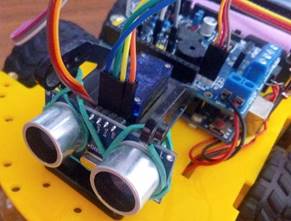
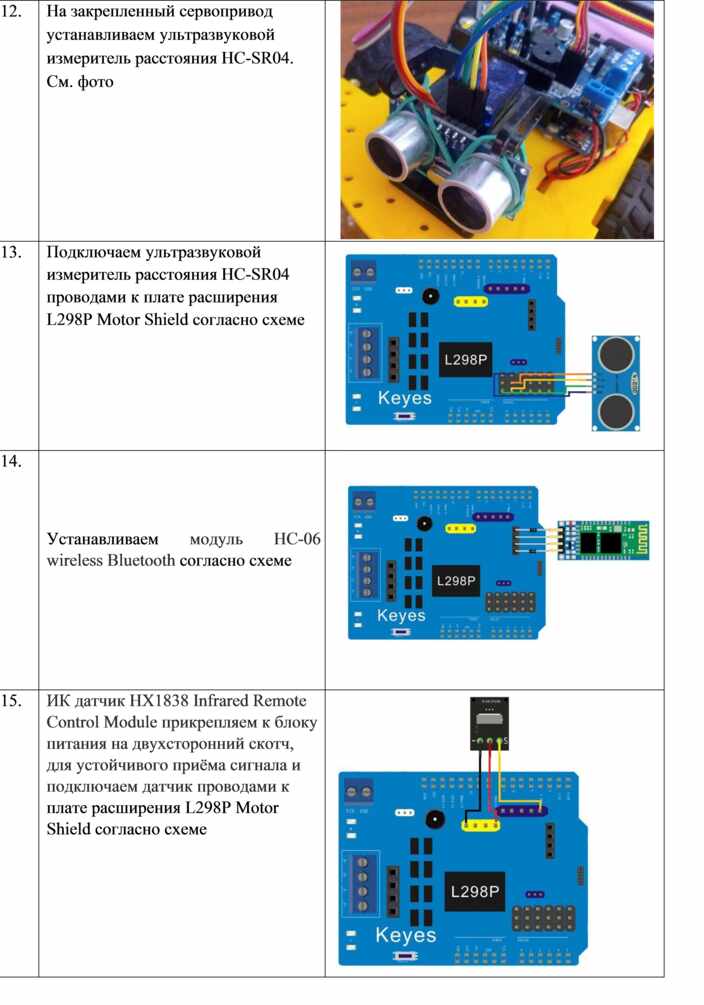
На закрепленный сервопривод устанавливаем ультразвуковой измеритель расстояния HC-SR04. См. фото
|
|
|
13. |
Подключаем ультразвуковой измеритель расстояния HC-SR04 проводами к плате расширения L298P Motor Shield согласно схеме
|
|
|
14. |
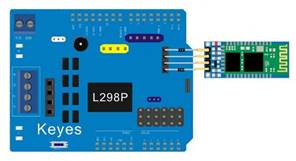
Устанавливаем модуль HC-06 wireless Bluetooth согласно схеме |
|
|
15. |
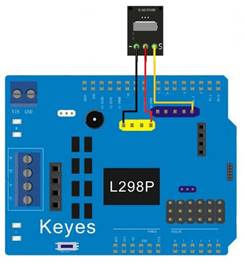
ИК датчик HX1838 Infrared Remote Control Module прикрепляем к блоку питания на двухсторонний скотч, для устойчивого приёма сигнала и подключаем датчик проводами к плате расширения L298P Motor Shield согласно схеме |
|
|
16. |
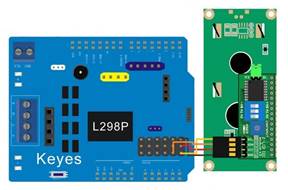
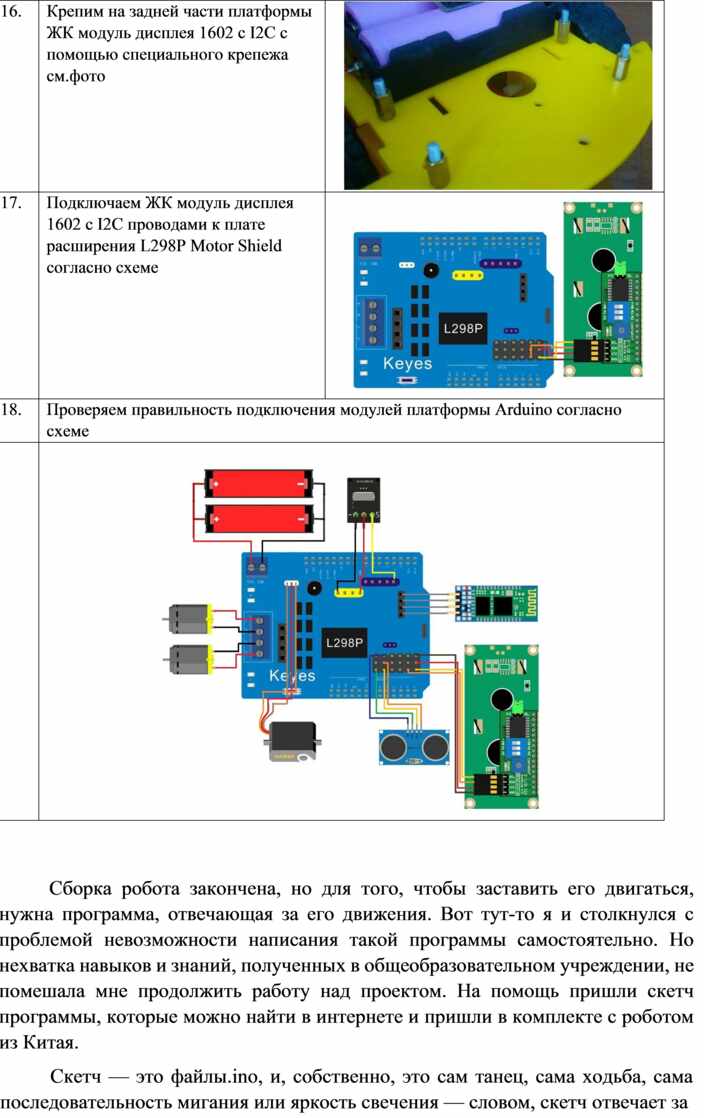
Крепим на задней части платформы ЖК модуль дисплея 1602 с I2C с помощью специального крепежа см.фото
|
|
|
17. |
Подключаем ЖК модуль дисплея 1602 с I2C проводами к плате расширения L298P Motor Shield согласно схеме
|
|
|
18. |
Проверяем правильность подключения модулей платформы Arduino согласно схеме |
|
|
|
|
|
Сборка робота закончена, но для того, чтобы заставить его двигаться, нужна программа, отвечающая за его движения. Вот тут-то я и столкнулся с проблемой невозможности написания такой программы самостоятельно. Но нехватка навыков и знаний, полученных в общеобразовательном учреждении, не помешала мне продолжить работу над проектом. На помощь пришли скетч программы, которые можно найти в интернете и пришли в комплекте с роботом из Китая.
Скетч — это файлы.ino, и, собственно, это сам танец, сама ходьба, сама последовательность мигания или яркость свечения — словом, скетч отвечает за то, что Ардуино со своими «руками-ногами» делает. Загрузить в Arduino библиотеку и скетч можно при помощи программы IDE.
Стоит отметить, что скетчи из Китая, содержат большое количество ошибок, из-за чего они не работают. Ошибки не без труда удалось исправить. Долгие мытарства поиска и устранения ошибок в силу ограничения объема проекта здесь отображены не будут.
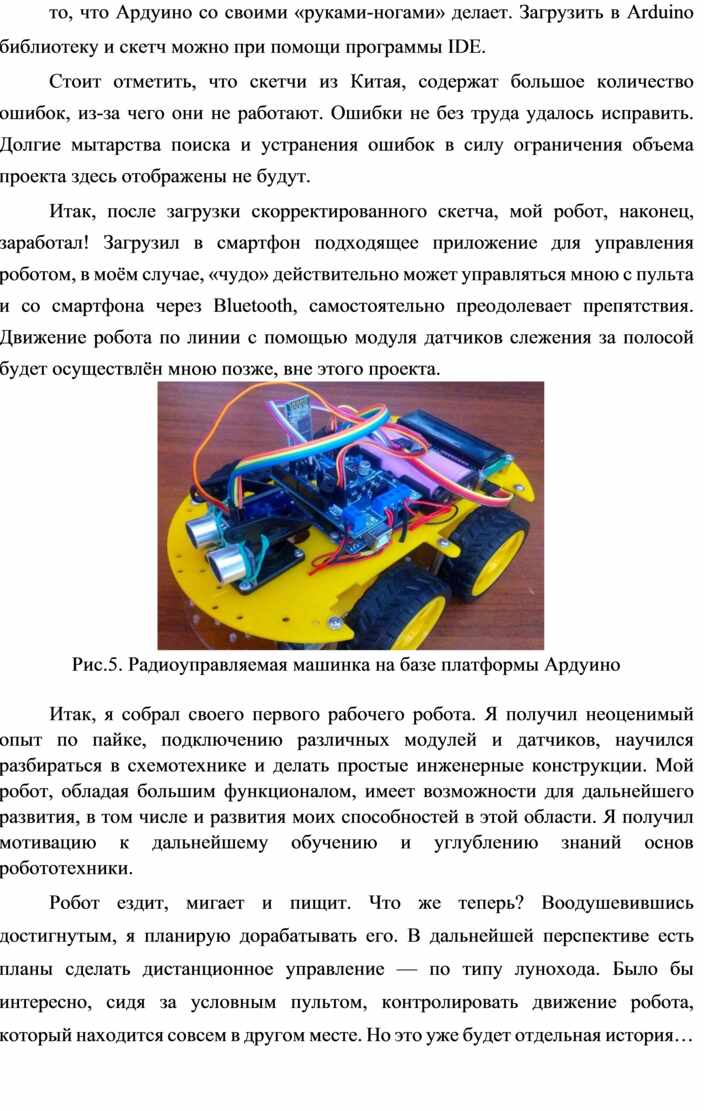
Итак, после загрузки скорректированного скетча, мой робот, наконец, заработал! Загрузил в смартфон подходящее приложение для управления роботом, в моём случае, «чудо» действительно может управляться мною с пульта и со смартфона через Bluetooth, самостоятельно преодолевает препятствия. Движение робота по линии с помощью модуля датчиков слежения за полосой будет осуществлён мною позже, вне этого проекта.

Итак, я собрал своего первого рабочего робота. Я получил неоценимый опыт по пайке, подключению различных модулей и датчиков, научился разбираться в схемотехнике и делать простые инженерные конструкции. Мой робот, обладая большим функционалом, имеет возможности для дальнейшего развития, в том числе и развития моих способностей в этой области. Я получил мотивацию к дальнейшему обучению и углублению знаний основ робототехники.
Робот ездит, мигает и пищит. Что же теперь? Воодушевившись достигнутым, я планирую дорабатывать его. В дальнейшей перспективе есть планы сделать дистанционное управление — по типу лунохода. Было бы интересно, сидя за условным пультом, контролировать движение робота, который находится совсем в другом месте. Но это уже будет отдельная история…
1. Бокселл Дж. Изучаем Arduino. 65 проектов своими руками, 2016.
2. Гололобов В.Н. С чего начинаются роботы? О проекте Arduino для школьников. Москва, 2011.
3. Момот М.В. Мобильные роботы на базе Arduino, СПб.: БХВ-Петербург, 2017.
4. Монк С. Программируем Arduino. Профессиональная работа со скетчами, Переводчик А. Макарова. — СПб.: Питер, 2017.
5. Петин В.А. Проекты с использованием контроллера Arduino
(Электроника) 2-е издание, 2015.
6. Страковский Д. А., Симаков Е. Е. Создание робота-гонщика на платформе Arduino // Юный ученый. — 2016. — №3. — С. 120-124.
7. Степанов С. Радио-ежегодник, 2015, выпуск 34
8. https://ru.wikipedia.org/wiki/Робототехника
9. https://ru.wikipedia.org/wiki/Робот
10. http://robo.detinso.ru/content/3
11. http://slidegur.com/doc/191016/r.bot-100-mozhet-ispol._zovat._sya-dlyaobespecheniya---smile-expo





Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.