Поделиться

Лекция 1.1. Определение и основные особенности систем реального времени
1. Определение систем реального времени.
2. Требования, предъявляемые к системам реального времени.
3. Основные области применения систем реального времени.
4. Аппаратурная среда систем реального времени.
1. Определение систем реального времени
Существует несколько определений систем реального времени (СРВ) (real time operating systems (RTOS)), большинство из которых противоречит друг другу. Приведем некоторые из них, чтобы продемонстрировать раз- личные взгляды на назначение и основные задачи СРВ:
1. Системой реального времени называется система, в которой успеш- ность работы любой программы зависит не только от ее логической пра- вильности, но и от времени, за которое она получила результат. Если вре- менные ограничения не удовлетворены, то фиксируется сбой в работе систем.
Таким образом, временные ограничения должны быть гарантированно удовлетворены. Это требует от системы быть предсказуемой, то есть вне за- висимости от своего текущего состояния и загруженности выдавать нужный результат за требуемое время. При этом желательно, чтобы система обеспе- чивала как можно больший процент использования имеющихся ресурсов.
Примером задачи, где требуется СРВ, является управление роботом, берущим деталь с ленты конвейера. Деталь движется, и робот имеет лишь небольшое временное окно, когда он может ее взять. Если он опоздает, то деталь уже не будет на нужном участке конвейера, и, следовательно, работа не будет сделана, несмотря на то, что робот находится в правильном месте. Если он позиционируется раньше, то деталь еще не успеет подъехать, и он заблокирует ей путь.
Другим примером может быть космический аппарат, находящийся на автопилоте. Сенсорные серводатчики должны постоянно передавать в управ- ляющий компьютер результаты измерений. Если результат какого-либо из- мерения будет пропущен, то это может привести к недопустимому несоот- ветствию между реальным состоянием систем космического аппарата и ин- формацией о нем в управляющей программе.
Различают сильное (hard) и слабое (soft) требование реального време- ни. Если запаздывание программы приводит к полному нарушению работы управляемой системы, то говорят о сильном реальном времени (жесткие СРВ). Если же запаздывание ведет только к потере производительности, то говорят о слабом реальном времени (мягкие СРВ). Большинство программ- ного обеспечения ориентировано на слабое реальное время, а задача хорошей СРВ - обеспечить уровень безопасного функционирования системы, даже если управляющая программа никогда не закончит своей работы.
2. Стандарт POSIX 1003.1 определяет СРВ следующим образом: «Ре- альное время в операционных системах - это способность операционной сис- темы обеспечить требуемый уровень сервиса в заданный промежуток време- ни».
3. Иногда системами реального времени называют системы постоян- ной готовности (on-line системы), или «интерактивные системы с достаточ- ным временем реакции». Обычно это делают фирмы-производители по мар- кетинговым соображениям. Если интерактивную программу называют рабо- тающей в реальном времени, то это означает, что она успевает обрабатывать запросы от человека, для которого задержка в сотни миллисекунд даже неза- метна.
4. Часто понятие «система реального времени» отождествляют с поня- тием «быстрая система». Это не всегда правильно. Время задержки реакции СРВ на событие не так уж важно (оно может достигать нескольких секунд). Главное, чтобы это время было достаточно для рассматриваемого приложения и гарантированно. Часто алгоритм с гарантированным временем работы менее эффективен, чем алгоритм, таким свойством не обладающий. Например, алгоритм «быстрой» сортировки (quicksort) в среднем работает значительно быстрее многих других алгоритмов сортировки, но его гарантированная оценка сложности значительно хуже.
5. Во многих важных сферах приложения СРВ вводятся свои понятия
«реального времени». Так, процесс цифровой обработки сигнала называют идущим в «реальном времени», если анализ (при вводе) и/или генерация (при выводе) данных может быть проведен за то же время, что и анализ и/или ге- нерация тех же данных без цифровой обработки сигнала.
Например, если при обработке аудио данных требуется 2,01 секунды для анализа 2,00 секунды звука, то это не процесс реального времени. Если же требуется 1,99 секунды, то это процесс реального времени. Исходя из выше сказанного, дадим определение системы реального времени в следую- щей интерпретации.
Определение. Система реального времени реагирует в предсказуемое время на непредсказуемое появление внешних событий.
Это определение предъявляет к системе вполне определенные базовые требования. Рассмотрим требования, предъявляемые к системам реального времени.
2. Требования, предъявляемые к системам реального времени Своевременная реакция. После того как произошло событие, реакция должна последовать не позднее, чем через требуемое время. Превышение этого времени рассматривается как серьезная ошибка.
Одновременная обработка информации, которая характеризует изме- нение процесса нескольких событий. Даже если одновременно происходит несколько событий, реакция ни на одно из них не должна запаздывать. Это означает, что система реального времени должна иметь встроенный параллелизм. Параллелизм достигается использованием нескольких процессоров в системе и/или многозадачным подходом.
Рассмотрим основные признаки систем жесткого и мягкого реального времени.
Признаки систем жесткого реального времени:
. недопустимость никаких задержек, ни при каких условиях;
. бесполезность результатов при опоздании;
. катастрофа при задержке реакции;
. цена опоздания бесконечно велика.
Пример системы жесткого реального времени - бортовая система управления самолетом.
Признаки систем мягкого реального времени:
. за опоздание результатов приходится платить;
. снижение производительности системы, вызванное запаздыванием реакции на происходящие события.
Пример - автомат розничной торговли и подсистема сетевого интер- фейса. В последнем случае можно восстановить пропущенный пакет, ис- пользуя сетевой протокол, повторяющий передачу пропущенных пакетов. При этом, конечно, произойдет снижение производительности системы.
Таким образом, различие между системами жесткого и мягкого реаль- ного времени определяется следующими требованиями: система называется системой жесткого реального времени, если она "не имеет права опаздывать", и мягкого реального времени - если ей "не следует опаз- дывать".
Введем понятие операционной системы (ОС). Операционная система - это комплекс программ для управления и координации работы всех уст- ройств системы, управления процессом выполнения прикладных программ и обеспечения диалога с пользователем.
Не существует операционных систем жесткого или мягкого реального времени. Понятия системы реального времени и операционной системы ре- ального времени (ОСРВ) часто смешиваются.
Система реального времени - это конкретная система, связанная с ре- альным объектом. Она включает в себя необходимые аппаратные средства, операционную систему и прикладное программное обеспечение.
Операционная система реального времени – это только инструмент, помогающий построить конкретную систему реального времени. Поэтому бессмысленно говорить об операционных системах жесткого или мягкого реального времени. Можно говорить только о том, можно ли с помощью данной операционной системы построить систему реального времени. Кон- кретная ОСРВ может только предоставить возможность создать систему же- сткого реального времени. Но обладание такой ОСРВ вовсе не делает систе- му "жесткой". Для создания системы жесткого реального времени необходи- мо сочетание подходящих аппаратных средств, адекватной операционной системы и правильного проектирования прикладного программного обеспе- чения.
Если, например, принято решение построить систему реального вре- мени, обслуживающую TCP/IP-соединение через Ethernet, то система
никогда не будет системой жесткого реального времени, поскольку сам Ethernet непредсказуем. В данном случае, основное ограничение на создание СРВ оказывает метод случайного доступа CSMA/CD.
Если, с другой стороны, вы создаете приложение над такой ОС, как "Windows 3.11", то ваша система никогда не будет системой жесткого реаль- ного времени, поскольку непредсказуемо поведение операционной системы.
Согласно определению, СРВ должна «обеспечить требуемый уровень сервиса в заданный промежуток времени». Этот промежуток времени обычно задается периодичностью и скоростью процессов, которыми управляет система. Приведем типичные времена реакции на внешние события в про- цессах, управляемых СРВ:
математическое моделирование - несколько микросекунд; радиолокация - несколько миллисекунд;
складской учет - несколько секунд; торговые операции - несколько минут;
управление производством - несколько минут; химические реакции - несколько часов.
Видно, что времена сильно разнятся и накладывают различные требо- вания на вычислительную установку, на которой работает СРВ. Различная предметная область использования СРВ, предъявляет к системам в каждом конкретном случае различные временные требования.
Интервал между поступлениями сообщений в ЭВМ может быть слу- чайным и определяться внешними факторами, такими, как нажатие клавиши оператором, или он может быть циклическим и управляться от часов или от сканирующего механизма в ЭВМ. Так же, как и время ответа, этот интервал может изменяться от доли миллисекунд до получаса и более.
Определим операционную систему реального времени как операцион- ную систему, с помощью которой можно построить систему жесткого реаль- ного времени. Обязательные требования к ОСРВ:
Требование 1: ОСРВ должна быть многонитиевой или многозадачной и поддерживать диспетчеризацию с вытеснением.
Поведение ОСРВ должно быть предсказуемым. Это не означает, что ОСРВ должна быть быстрой, но означает, что максимальный промежуток времени для выполнения любой операции должен быть известен заранее и должен быть согласован с требованиями приложения. Например, Windows
3.11 - даже на процессоре Pentium Pro с тактовой частотой 200 МГц - непри- менима для построения систем реального времени, поскольку одно приложение может навсегда захватить управление и заблокировать все остальные приложения.
Первое требование состоит в том, чтобы такая ОС была многонитие- вой или многозадачной и, кроме того, планировщик должен иметь возмож- ность вытеснять любую нить (задачу) и передавать управление той нити (за- даче), которая больше всего в этом нуждается. Для обеспечения вытеснения на уровне прерываний структура обслуживания прерываний (в том числе и аппаратная архитектура) должна быть многоуровневой.
Требование 2: Должно существовать понятие приоритета нити (зада- чи). Как найти нить (задачу), которая нуждается в ресурсах больше всего? В идеальном случае ОСРВ предоставляет ресурсы той задаче или драйверу, у которых осталось меньше всего времени до истечения срока реакции на со- бытие (назовем такую ОС – ОС управляющей критическими сроками). Одна- ко для реализации этого механизма нужно уметь прогнозировать, сколько времени понадобится задаче для завершения своей работы и сколько времени понадобится другим задачам для того, чтобы они успели к своим крити- ческим срокам. Подобная ОСРВ пока еще не создана из-за сложности реализации. Поэтому разработчики ОС используют другой метод: они вводят концепцию приоритетов для нитей (задач).
При построении конкретной системы реального времени разработчик должен выстроить приоритеты задач таким образом, чтобы каждая из них успела с реакцией к своему критическому сроку, то есть он должен транс- формировать базовое требование реального времени "успеть с реакцией к нужному моменту" в комбинацию приоритетов и в сценарий их динамиче- ского изменения. Очевидно, что при этой трансформации возможны ошибки, приводящие к неправильной работе системы. Для решения этого вопроса ис- пользуют различные теории, такие как, теорию монотонного планирования или различные методы и средства моделирования. Однако, эти методы ока- зываются не всегда эффективными. Как бы то ни было, во всех современных ОСРВ приходится использовать механизм приоритетов как один из инстру- ментов предсказуемости поведения системы. На сегодяшний день не имеется другого решения, понятие приоритета потока для систем реального времени неизбежно.
Требование 3: ОС должна поддерживать предсказуемые механизмы синхронизации нитей (задач). Все нити (задачи) разделяют данные (ресурсы) и должны обмениваться между собой информацией, поэтому необходимы механизмы межзадачного (межнитиевого) взаимодействия.
Требование 4: Должен существовать механизм наследования приори- тетов (система должна быть защищена от инверсии приоритетов). Под ин- версией приоритетов будем понимать изменение их обычного порядка. На самом деле именно эти механизмы синхронизации и тот факт, что разные нити выполняются в одном и том же пространстве памяти, и определяют различие между нитями и процессами. Процессы не разделяют одно и то же пространство памяти.
Комбинации приоритетов нитей и разделение между ними ресурсов приводит к классической проблеме инверсии приоритетов. Для создания ус- ловия инверсии приоритетов должно быть задействовано как минимум три нити. Если нить с самым низким приоритетом заблокировала ресурс (кото- рый она делит с самой высокоприоритетной нитью), в то время как работает нить с промежуточным приоритетом, возникает следующий эффект: нить с наивысшим приоритетом ожидает освобождения ресурса; нить с промежу- точным приоритетом вытесняет низкоприоритетную нить и работает, пока не завершится; управление получает низкоприоритетная нить, которая освобо-
ждает ресурс, и только после этого нить с высоким приоритетом может про- должить свою работу. В этом случае время, необходимое для завершения ни- ти с наивысшим приоритетом, зависит от времени работы нити с более низ- ким приоритетом – это и есть инверсия приоритетов. Очевидно, что в такой ситуации высокоприоритетная нить может "прозевать" критическое событие. Чтобы избежать таких ситуаций, ОСРВ должна быть снабжена меха- низмом наследования приоритетов, то есть блокирующая нить должна на- следовать приоритет нити, которую она блокирует (конечно, только, в том случае, если заблокированная нить имеет более высокий приоритет). Поведение ОС должно быть предсказуемо. Наследование означает, что бло- кирующий ресурс тред наследует приоритет треда, который он блокирует (это справедливо лишь в том случае, если блокируемый тред имеет более
высокий приоритет).
Здесь есть еще одна проблема: количество возможных приоритетов очень мало. Большинство современных ОСРВ допускают использование как минимум 256 приоритетов. В чем суть проблемы? Ответ очевиден: чем боль- ше приоритетов в распоряжении проектировщика, тем более предсказуемую систему можно создать. При оптимальном проектировании системы различ- ным нитям присваиваются различные приоритеты.
Рассмотрим временные требования к операционным системам. Разра- ботчик должен знать все времена выполнения системных вызовов и уметь предсказывать поведение системы в любых ситуациях. Поэтому производи- тель ОСРВ обязательно должен давать информацию о следующих временных характеристиках системы:
. задержке прерывания (interrupt latency) - то есть время от момента появления запроса на прерывание до начала его обработки;
. максимальном времени исполнения каждого системного вызова. Оно должно быть предсказуемым и не зависеть от количества объектов в системе;
. максимальном времени, на которое ОС и драйверы могут блокиро- вать прерывания.
Разработчик также должен знать и учитывать следующее:
. уровни системных прерываний;
. уровни прерываний устройств, максимальное время, которое зани- мают программы обработки прерываний, и т.д.
Если все перечисленные выше времена известны, то имеются все предпосылки для создания системы жесткого реального времени. При этом требования к производительности разрабатываемой системы должны быть согласованы с характеристиками выбранной ОСРВ и аппаратуры.
Те места в программах, в которых происходит обращение к критиче- ским ресурсам, называются критическими секциями. Решение этой проблемы заключается в организации такого доступа к критическому ресурсу, когда только одному процессу разрешается входить в критическую секцию.
Ресурсы, которые не допускают одновременного использования не- сколькими процессами, называются критическими. Если нескольким вычис- лительным ресурсам необходимо пользоваться критическим ресурсом в ре-
жиме разделения, им следует синхронизировать свои действия таким обра- зом, чтобы ресурс всегда находился в распоряжении не более чем одного из процессов.
Любая система реального времени взаимодействует с внешним миром через аппаратуру компьютера. Внешние события преобразуются в прерыва- ния и обрабатываются драйвером устройства.
Доступ к аппаратуре имеют только драйверы. Поскольку приложения реального времени часто работают со специфическими внешними устройст- вами, требующими и специфического управления, разработчик системы ре- ального времени должен уметь разрабатывать драйверы устройств.
В ОСРВ разработчик в первую очередь узнает, на каких приоритетах работают драйверы других устройств. Здесь обычно существует свободное пространство для прерываний с приоритетами, которые выше приоритетов стандартных драйверов.
Требование 5: Политика управления памятью в ОСРВ. При проекти- ровании системы реального времени необходимо рассмотреть и другой важный вопрос: как строится политика управления памятью в ОСРВ? От решения этой проблемы во многом зависит быстродействие проектируемой системы.
Требования, накладываемые на вычислительную установку реального времени, формулируются следующим образом:
1. В зависимости от сложности программы управления, требование
«реального времени» накладывает различные условия на вычислительную мощность процессора для СРВ.
2. Внешние события становятся известны системе посредством преры- ваний (interrupt requests (IRQ)) (т.е. запросов на обслуживание со стороны внешних устройств). Поэтому часто для ОСРВ более важна не мощность процессора, а характеристики компьютера, связанные с подсистемой преры- ваний. Желательными являются:
- наличие как можно большего количества уровней прерываний (IRQ levels) (т.е. аппаратного или/и программного декодирования источника за- проса);
- как можно меньшее время реакции на прерывание (т.е. как можно меньшее время между поступлением запроса на обслуживание и началом выполнения обслуживающей программы).
3. СРВ часто сама является инициатором периодических процессов, которыми управляет (например, движением космического аппарата или луча радара). Поэтому необходимо иметь в наличии один или несколько таймеров (аппаратных устройств, выдающих прерывание через заданные промежутки времени), которые могут работать в периодическом или ждущем режиме.
4. Ввиду того, что СРВ часто управляет ответственными промышлен- ными процессами, данное обстоятельство выдвигает очень жесткие требова- ния к надежности используемого оборудования.
В течение длительного времени основными потребителями СРВ были военная и космическая области. Сейчас ситуация кардинально изменилась и
СРВ можно встретить даже в товарах широкого потребления.
Рассмотрим основные области применения СРВ.
3. Основные области применения систем реального времени Военная и космическая области:
- бортовое и встраиваемое оборудование;
- системы измерения и управления, радары;
- цифровые видеосистемы, симуляторы;
- ракеты, системы определения положения и привязки к местности. Промышленность:
- автоматические системы управления производством (АСУП), автоматические системы управления технологическим процессом (АСУТП);
- автомобилестроение: симуляторы, системы управления двигателем, автоматическое сцепление, системы антиблокировки колес и т.д.;
- энергетика: сбор информации, управление данными и оборудовани-
ем;
- телекоммуникации: коммуникационное оборудование, сетевые ком-
мутаторы, телефонные станции и т.д.;
- банковское оборудование (например, во многих банкоматах работает СРВ QNX).
Товары широкого потребления:
- мобильные телефоны (например, в телефонах стандарта GSM работает СРВ pSOS);
- цифровые телевизионные декодеры;
- цифровое телевидение (мультимедиа, видеосерверы);
- компьютерное и офисное оборудование (принтеры, копиры), напри- мер, в факсах применяется СРВ VxWorks, в устройствах чтения компакт- дисков – СРВ VRTX32.
4. Аппаратурная среда систем реального времени
Систему реального времени можно разделить как бы на три слоя:
1. Ядро - содержит только строгий минимум, необходимый для работы системы: управление задачами, их синхронизация и взаимодействие, управление памятью и устройствами ввода/вывода; размер ядра очень ограничен: часто несколько килобайт.
2. Система управления - содержит ядро и ряд дополнительных сервисов, расширяющих его возможности: расширенное управление памятью, вводом/выводом, задачами, файлами и т.д., обеспечивает также взаимодействие системы и управляющего/управляемого оборудования.
3. Система реального времени - содержит систему управления и на- бор утилит: средства разработки (компиляторы, отладчики и т.д.), средства визуализации (взаимодействия человека и операционной системы).
Вычислительные установки, на которых применяются СРВ, можно ус- ловно разделить на три группы.
1. «Обычные» компьютеры. По логическому устройству совпадают с настольными системами. Аппаратное устройство несколько отличается. Для обеспечения минимального времени простоя в случае технической неполадки
процессор, память и т.д. размещены на съемной плате, вставляемой в спе- циальный разъем так называемой «пассивной» основной платы. В другие разъемы этой платы вставляются платы периферийных контроллеров и дру- гое оборудование. Сам компьютер помещается в специальный корпус, обес- печивающий защиту от пыли и механических повреждений. В качестве мо- ниторов часто используются жидкокристаллические дисплеи, иногда с сен- сочувствительным покрытием.
По экономическим причинам среди процессоров этих компьютеров доминирует семейство Intel 80x86.
Подобные вычислительные системы обычно не используются для не- посредственного управления промышленным оборудованием. Они, в основном, служат как терминалы для взаимодействия с промышленными компьютерами и встроенными контроллерами, для визуализации состояния оборудования и технологического процесса. На таких компьютерах в качестве операционных систем часто используются «обычные» операционные системы с дополнительными программными комплексами, адаптирующими их к требованиям «реального времени».
2. Промышленные компьютеры. Состоят из одной платы, на которой размещены: процессор, контроллер памяти, память 4-х видов:
- ПЗУ, постоянное запоминающее устройство (ROM, read-only memory), где обычно размещена сама операционная система реального вре- мени; типичная емкость – 0,5-1 Мб;
- ОЗУ, оперативное запоминающее устройство (RAM, random access memory), куда загружается код и данные ОСРВ; обычно организована на базе динамической памяти (dynamic RAM, DRAM); типичная емкость – 16-128 Mб;
- статическое ОЗУ (static RAM, SRAM) (то же, что и ОЗУ, но питается от имеющейся на плате батарейки), где размещаются критически важные данные, которые не должны пропадать при выключении питания; типичная емкость - 2Mб; типичное время сохранения данных - 5 лет;
- флеш-память (flash RAM) (электрически программируемое ПЗУ), ко- торая играет роль диска для ОСРВ; типичная емкость - 4Mб.
Контроллеры периферийных устройств: SCSI (Small Computer System Interface), Ethernet, COM портов, параллельного порта, несколько програм- мируемых таймеров. На плате находится также контроллер и разъем шины, через которую компьютер управляет внешними устройствами. В качестве шины в подавляющем большинстве случаев используется шина VME, кото- рую в последнее время стала теснить шина Compact PCI.
Несмотря на наличие контроллера SCSI, обычно ОСРВ работает без дисковых накопителей, поскольку они не удовлетворяют предъявляемым к системам реального времени требованиям по надежности, устойчивости к вибрации, габаритам и времени готовности после включения питания.
Плата помещается в специальный корпус (крейт), в котором разведены разъемы шины и установлен блок питания. Корпус обеспечивает надлежащий температурный режим, защиту от пыли и механических
повреждений. В этот же корпус вставляются платы аналого-цифровых и/или цифро-аналоговых преобразователей (АЦП и/или ЦАП), через которые осуществляется ввод/вывод управляющей информации, платы управления электромоторами. В тот же корпус могут вставляться другие такие же (или иные) промышленные компьютеры, образуя многопроцессорную систему.
Среди процессоров промышленных компьютеров доминируют процессоры семейств Power PC (Motorola IBM) и Motorola 68xxx (Motorola). Также присутствуют процессоры семейств SPARC (SUN), Intel 80x86 (Intel), ARM (ARM), Intel 80960x (Intel). При выборе процессора определяющими факторами являются получение требуемой производительности при наименьшей тактовой частоте, а, значит, и наименьшей рассеиваемой мощности, а также наименьшее время переключения задач и реакции на прерывания. Подчеркнем важность малой рассеиваемой мощности процессора с точки зрения получения высокой отказоустойчивости системы в целом, поскольку малый нагрев процессора позволяет обойтись без охлаждающего вентилятора, который является достаточно ненадежным механическим устройством.
Промышленные компьютеры используются для непосредственного управления промышленным или иным оборудованием. Они часто не имеют монитора и клавиатуры, и для взаимодействия с ними служат «обычные» компьютеры, соединенные с ними через последовательный порт (COM порт) или Ethernet.
3. Встраиваемые системы. Устанавливаются внутрь оборудования, ко- торым они управляют. Для крупного оборудования (например, ракета или космический аппарат) могут по исполнению совпадать с промышленными компьютерами. Для оборудования поменьше (например, принтер) могут представлять собой процессор с сопутствующими элементами, размещенный на одной плате с другими электронными компонентами этого оборудования. Для миниатюрного оборудования (например, мобильный телефон) процессор с сопутствующими элементами может быть частью одной из больших интегральных схем этого оборудования.
В дальнейшем под компьютером для ОСРВ будем понимать промыш- ленный компьютер. Отметим основные особенности ОСРВ, диктуемые не- обходимостью ее работы на промышленном компьютере.
Система часто должна работать на бездисковом компьютере и осуще- ствлять начальную загрузку из ПЗУ. В силу этого:
- критически важным является размер системы;
- для экономии места в ПЗУ часть системы может храниться в сжатом виде и загружаться в ОЗУ по мере необходимости;
- система часто позволяет исполнять код как в ОЗУ, так и в ПЗУ;
- при наличии свободного места в ОЗУ система часто копирует себя из медленного ПЗУ в более быстрое ОЗУ;
- сама система компилируется, линкуется и превращается в загрузоч- ный модуль на другом, «обычном» компьютере, связанном с промышленным компьютером через последовательный порт или Ethernet; это требует специ-
ального кроссплатформенного инструментария разработчика, поскольку ти- пы процессоров и/или операционных систем на этих двух компьютерах не совпадают.
Система должна поддерживать как можно более широкий ряд процес- соров, что дает возможность потребителю выбрать процессор подходящей мощности, а также поддерживать как можно более широкий ряд специально- го оборудования (периферийные контроллеры, таймеры и т.д.), которые мо- гут стоять на плате компьютера и платах, которыми он управляет через об- щую шину.
Очевидно, что для получения законченной системы управления недос- таточно промышленного компьютера, АЦП и/или ЦАП платы, крейта и ОСРВ. Нужно еще написать программу, которая будет непосредственно управлять конкретным промышленным оборудованием. Для этого необходим (кроссплатформенный) инструментарий разработчика, цена которого может превосходить цену перечисленных выше компонент, вместе взятых. Правда, этот инструментарий нужен только разработчику, а полученная программа может работать на многих компьютерах.
Критически важным параметром для СРВ является время ее реакции на прерывания (которое складывается из аппаратного времени задержки и программных задержек), а также предсказуемость этого времени.
Таким образом, понятие «системы реального времени» является новым и в полной мере не устоявшимся. Однако основной мыслью существующих определений является наложение жестких или мягких ограничений на время отклика системы при поступлении на нее внешнего воздействия. В связи с этим нельзя считать системами реального времени информационно-управляющие системы, не предусматривающие в алгоритмах своего функционирования возможность выдачи откликов в условиях лимита времени. Поэтому организация работы информационно- управляющих систем, функционирующих в режиме реального времени, существенно отличается от работы традиционных систем управления.
1. Основные понятия систем реального времени.
2. Типы задач систем реального времени.
3. Классы систем реального времени.
1. Основные понятия систем реального времени
Рассмотрим суть основных понятий, которые используются в системах реального времени. Одним из основных понятий данной дисциплины является понятие процесса.
Процесс - это динамическая сущность программы, ее код в процессе своего выполнения.
В данном случае под программой понимается описание на некотором формализованном языке алгоритма, решающего поставленную задачу. Про- грамма является статической единицей, то есть неизменяемой с точки зрения операционной системы, ее выполняющей.
Процесс имеет:
- собственные области памяти, где осуществляется хранение кода и данных;
- собственный стек;
- собственное отображение виртуальной памяти на физическую (в сис- темах с виртуальной памятью);
- собственное состояние.
Процесс может находиться в одном из следующих типичных состоя- ний (точное количество и свойства того или иного состояния зависят от опе- рационной системы):
1) «остановлен» - процесс остановлен и не использует процессор; на- пример, в таком состоянии процесс находится сразу после создания;
2) «терминирован» - процесс терминирован и не использует процессор; например, процесс закончился, но еще не удален операционной системой;
3) «ждет» - процесс ждет некоторого события (которым может быть аппаратное или программное прерывание, сигнал или другая форма межпро- цессорного взаимодействия);
4) «готов» - процесс не остановлен, не терминирован, не ожидает, не удален, но и не работает; например, процесс может не получать доступа к процессору, если в данный момент выполняется другой, более приоритетный процесс;
5) «выполняется» - процесс выполняется и использует процессор; в ОСРВ это обычно означает, что этот процесс является самым приоритетным среди всех процессов, находящихся в состоянии «готов».
Понятие вычислительного процесса (или просто «процесса») было введено для реализации идей мультипрограммирования и мультизадачности. Как понятие процесс является определенным видом абстракции. Последова- тельный процесс (иногда называемый «задачей») – это выполнение отдель- ной программы с ее данными на последовательном процессоре.
В концепции, получившей широкое распространение в 70 – е годы, под задачей понимали совокупность связанных между собой и образующих единое целое программных модулей и данных, требующих ресурсов вычислительной системы для своей реализации. В последующие годы задачей стали называть единицу работы, для выполнения которой предоставляется центральный процессор. Вычислительный процесс может включать в себя несколько задач.
Концептуально процессор рассматривается в двух аспектах: во – пер- вых, он является носителем данных и, во – вторых, он одновременно выпол- няет операции, связанные с их обработкой. Определение концепции процесса преследует цель выработать механизмы распределения и управления ресурсами. Понятие ресурса, так же как и понятие процесса, является одним из основных при рассмотрении операционных систем реального времени. Термин ресурс обычно применяется по отношению к повторно используемым, относительно стабильным и часто недостающим объектам, которые запрашиваются, используются и освобождаются процессами в
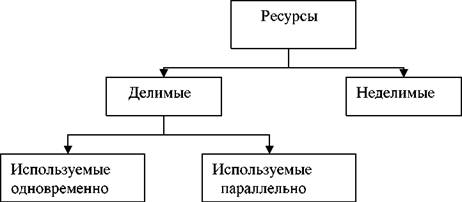 |
Рисунок 1. - Классификация ресурсов
При разработке первых систем ресурсами считались процессорное время, память, каналы ввода/вывода и периферийные устройства. Однако, с течением времени понятие ресурса стало гораздо более универсальным и об- щим. Различного рода программные и информационные ресурсы также могут быть определены для системы как объекты, которые могут разделяться и распределяться, и доступ к которым, необходимо соответствующим образом контролировать. В настоящее время понятие ресурса превратилось в абст- рактную структуру с целым рядом атрибутов, характеризующих способы доступа к этой структуре и ее физическое представление в системе.
В первых вычислительных системах любая программа могла выпол- няться только после полного завершения предыдущей программы. Поскольку первые вычислительные системы были построены в соответствии с прин- ципами Неймана, все подсистемы и устройства компьютера управлялись ис- ключительно центральным процессором. Центральный процессор осуществ- лял и выполнение вычислений, и управление операциями ввода/вывода дан- ных. Соответственно, пока осуществлялся обмен данными между оператив- ной памятью и внешними устройствами, процессор не мог выполнять вычис- ления. Введение в состав вычислительной машины специальных контролле- ров позволило совместить во времени (распараллелить) операции вывода по- лученных данных и последующие вычисления на центральном процессоре. Однако, процессор продолжал часто и долго простаивать, дожидаясь завер- шения очередной операции ввода/вывода. Поэтому было предложено орга- низовать мультипрограммный (мультизадачный) режим работы вычисли- тельной системы. Суть его заключается в том, что пока одна программа (один вычислительный процесс или задача) ожидает завершения очередной
операции ввода/вывода, другая программа (а точнее, другая задача) может быть поставлена на решение.
Если в операционной системе могут одновременно существовать не- сколько процессов или/и задач, находящихся в состоянии «выполняется», то говорят, что это многозадачная система, а эти процессы называют парал- лельными.
Если процессор один, то в каждый момент времени на самом деле ре- ально выполняется только один процесс или задача. Система разделяет время между такими «выполняющимися» процессами, давая каждому, квант времени, пропорциональный его приоритету. Этот квант времени часто не зависит от специфики решаемой задачи реального времени, поэтому такой подход обычно не используется в СРВ. Обычно в СРВ в состоянии выполнения может быть только один процесс. В «хорошей» СРВ это можно изменить программным путем.
Благодаря совмещению во времени выполнения двух программ общее время выполнения двух задач получается меньше, чем, если бы мы выполня- ли их по очереди (запуск только одной задачи после полного завершения другой). Но время выполнения каждой задачи в общем случае становится больше, чем, если бы мы выполняли каждую из них как единственную.
При мультипрограммировании повышается пропускная способность системы, но отдельный процесс никогда не может быть выполнен быстрее, чем, если бы он выполнялся в однопрограммном режиме (всякое разделение ресурсов замедляет работу одного из участников за счет дополнительных за- трат времени на ожидание освобождения ресурса).
Система поддерживает мультипрограммирование и старается эффек- тивно использовать ресурсы путем организации к ним очередей запросов, составляемых тем или иным способом. Это требование достигается поддер- жанием в памяти более одного процесса, ожидающего процессор, и более одного процесса, готового использовать другие ресурсы, как только послед- ние станут доступными. Общая схема выделения ресурсов такова. При необ- ходимости использовать какой-либо ресурс (оперативную память, устройство ввода/вывода, массив данных и т.п.), задача обращается к супервизору операционной системы – ее центральному управляющему модулю, который может состоять из нескольких модулей, например: супервизор ввода/вывода, супервизор прерываний, супервизор программ, диспетчер задач и т.д. – по- средством специальных вызовов (команд, директив) и сообщает о своем тре- бовании. При этом указывается вид ресурса и, если надо, его объем. Дирек- тива обращения к операционной системе передает ей управление, переводя процессор в привилегированный режим работы, который обязательно суще- ствует в СРВ.
Ресурс может быть выделен задаче, обратившейся к супервизору с со- ответствующим запросом, если:
- он свободен и в системе нет запросов от задач более высокого при- оритета к этому же ресурсу;
- текущий запрос и ранее выданные запросы допускают совместное использование ресурсов;
- ресурс используется задачей низшего приоритета и может быть вре- менно отобран (разделяемые ресурсы).
Получив запрос, система либо удовлетворяет его и возвращает управ- ление задаче, выдавшей данный запрос, либо, если ресурс занят, ставит зада- чу в очередь к ресурсу, переводя ее в состояние ожидания (блокируя).
После окончания работы с ресурсом задача опять с помощью специ- ального вызова супервизора сообщает операционной системе об отказе от ресурса, или операционная система забирает ресурс сама, если управление возвращается супервизору после выполнения какой-либо системной функ- ции. Супервизор операционной системы, получив управление по этому об- ращению, освобождает ресурс и проверяет, имеется ли очередь к освобо- дившемуся ресурсу. Если очередь есть – в зависимости от принятой дисцип- лины обслуживания и приоритетов заявок он выводит из состояния ожидания задачу, ждущую ресурс, и переводит ее в состояние готовности к выпол- нению. После этого управление либо передается данной задаче, либо воз- вращается той, которая только что освободила ресурс.
В общем случае при организации управления ресурсами в СРВ всегда требуется принять решение о том, что в данной ситуации выгоднее: быстро обслуживать отдельные наиболее важные запросы, предоставлять всем про- цессам равные возможности, либо обслуживать максимально возможное ко- личество процессов и наиболее полно использовать ресурсы.
Стек (stack) - это область памяти, в которой размещаются локальные переменные, аргументы и возвращаемые значения функций. Вместе с обла- стью статических данных полностью задает текущее состояние процесса.
Виртуальная память - это «память», в адресном пространстве кото- рой работает процесс. Виртуальная память:
1) позволяет увеличить объем памяти, доступной процессам за счет дисковой памяти;
2) обеспечивает выделение каждому из процессов виртуально непре- рывного блока памяти, начинающегося (виртуально) с одного и того же ад- реса;
3) обеспечивает изоляцию одного процесса от другого.
Трансляцией виртуального адреса в физический адрес занимается опе- рационная система. Для ускорения этого процесса многие компьютерные системы имеют поддержку со стороны аппаратуры, которая может быть либо прямо в процессоре, либо в специальном устройстве управления памятью. Среди механизмов трансляции виртуального адреса преобладает страничный, при котором виртуальная и физическая память разбиваются на части равного размера, называемые страницами (типичный размер - 4Kб), между страницами виртуальной и физической памяти устанавливается взаимно од- нозначное (для каждого процесса) отображение. Отметим, что ОСРВ стре- мятся получить максимальную производительность на имеющемся оборудо-
вании, поэтому некоторые ОСРВ не используют механизм виртуальной па- мяти из-за задержек, вносимых при трансляции адреса.
Межпроцессное взаимодействие - это тот или иной способ передачи информации из одного процесса в другой. Наиболее распространенными формами взаимодействия процессов являются (не все системы поддерживают перечисленные ниже возможности):
1) разделяемая память - два (или более) процесса имеют доступ к од- ному и тому же блоку памяти. В системах с виртуальной памятью организа- ция такого вида взаимодействия требует поддержки со стороны операционной системы, поскольку необходимо отобразить соответствующие блоки виртуальной памяти процессов на один и тот же блок физической памяти); семафоры - два (или более) процесса имеют доступ к одной пере- менной, принимающей значение 0 или 1. Сама переменная часто находится в области данных операционной системы и доступ к ней организуется посред- ством специальных функций;
3) сигналы - это сообщения, доставляемые посредством операционной системы процессу. Процесс должен зарегистрировать обработчик этого со- общения у операционной системы, чтобы получить возможность реагировать на него. Часто операционная система извещает процесс сигналом о наступ- лении какого-либо сбоя, например, делении на 0, или о каком-либо аппаратном прерывании, например, прерывании таймера;
4) почтовые ящики - это очередь сообщений (обычно тех или иных структур данных), которые помещаются в почтовый ящик процессами и/или операционной системой. Несколько процессов могут ждать поступления со- общения в почтовый ящик и активизироваться после его поступления. Тре- бует поддержки со стороны операционной системы.
Событие - это оповещение процесса со стороны операционной систе- мы о той или иной форме межпроцессного взаимодействия, например, о принятии семафором нужного значения, о наличии сигнала, о поступлении сообщения в почтовый ящик.
Создание, обеспечение взаимодействия, разделение процессорного времени требует от операционной системы значительных вычислительных затрат, особенно в системах с виртуальной памятью. Это связано, прежде всего, с тем, что каждый процесс имеет свое отображение виртуальной памяти на физическую, которое надо менять при переключении процессов и при обеспечении их доступа к объектам взаимодействия (общей памяти, семафорам, почтовым ящикам). Часто бывает так, что требуется запустить несколько копий одной и той же программы, например, для управления несколькими единицами одного и того же оборудования. В этом случае мы несем двойные накладные расходы: держим в оперативной памяти несколько копий кода одной программы и тратим дополнительное время на обеспечение их взаимодействия.
Задача (или поток, или нить, thread) - это как бы одна из ветвей исполнения процесса:
- разделяет с процессом область памяти под код и данные;
- имеет собственный стек;
- разделяет с процессом отображение виртуальной памяти на физиче- скую (в системах с виртуальной памятью);
- имеет собственное состояние.
Таким образом, у двух задач в одном процессе вся память является разделяемой и дополнительные расходы, связанные с разным отображением виртуальной памяти на физическую, сведены к нулю. Для задач так же, как для процессов, определяются понятия состояния задачи и межзадачного взаимодействия. Отметим, что для двух процессов обычно требуется органи- зовать что-то общее (память, канал и т.д.) для их взаимодействия, в то время как для двух потоков часто требуется организовать что-то общее (например, область памяти), имеющее свое значение в каждом из них.
Приоритет - это число, приписанное операционной системой каждому процессу и задаче. Чем больше это число, тем важнее этот процесс или задача и тем больше процессорного времени он или она получит. При неправильном планировании приоритетов в ОСРВ, задача с меньшим приоритетом может вообще не получить управления при наличии в состоянии готовности задачи с большим приоритетом.
Связывание (линковка, linkage) - это процесс превращения скомпилированного кода (объектных модулей) в загрузочный модуль (то есть то, что может исполняться процессором при поддержке операционной системы). Различают:
- статическое связывание, когда код необходимых для работы про- граммы библиотечных функций физически добавляется к коду объектных модулей для получения загрузочного модуля;
- динамическое связывание, когда в результирующем загрузочном модуле проставляются лишь ссылки на код необходимых библиотечных функций; сам код будет реально добавлен к загрузочному модулю только при его исполнении.
При статическом связывании загрузочные модули получаются очень большого размера. Поэтому подавляющее большинство современных опе- рационных систем использует динамическое связывание, несмотря на то, что при этом начальная загрузка процесса на исполнение медленнее, чем при статическом связывании из-за необходимости поиска и загрузки кода нужных библиотечных функций (часто только тех из них, которые не были загружены для других процессов). При этом для избежания недетермини- рованной задержки на загрузку программы на исполнение все необходимые процессы реального времени запускают при старте системы (заранее, а не по требованию).
2. Типы задач систем реального времени Всякий процесс содержит одну или несколько задач. Операционная система позволяет задаче порождать новые задачи. Задачи, по своей манере действовать, можно разделить на 3 категории:
1. Циклические задачи. Характерны для процессов управления и инте- рактивных процессов.
2. Периодические задачи. Характерны для многих технологических процессов и задач синхронизации.
3. Импульсные задачи. Характерны для задач сигнализации и асин- хронных технологических процессов.
Чтобы система могла управлять задачами, она должна располагать всей необходимой для этого информацией. С этой целью на каждую задачу (процесс) заводится специальная информационная структура, называемая дескриптором процесса (описателем задачи). В общем случае дескриптор процесса содержит следующую информацию:
- идентификатор процесса (так называемый PID - process identificator);
- тип (или класс) процесса, который определяет для супервизора неко- торые правила предоставления ресурсов. Управление вводом/выводом осу- ществляется операционной системой, компонентом, который называют су- первизором ввода/вывода;
- приоритет процесса, в соответствии с которым супервизор предоставляет ресурсы. В рамках одного класса процессов в первую очередь обслуживаются более приоритетные процессы;
- переменную состояния, которая определяет, в каком состоянии нахо- дится процесс (готов к работе, в состоянии выполнения, ожидание устройст- ва ввода/вывода и т.д.);
- защищенную область памяти (или адрес такой зоны), в которой хра- нятся текущие значения регистров процесса, если процесс прерывается, не закончив работы. Эта информация называется контекстом задачи;
- информацию о ресурсах, которыми процесс владеет и/или имеет пра- во пользоваться (указатели на открытые файлы, информация о незавершен- ных операциях ввода/вывода и т.д.);
- место (или его адрес) для организации общения с другими процесса-
ми;
- параметры времени запуска (момент времени, когда процесс должен
активизироваться, и периодичность этой процедуры);
- в случае отсутствия системы управления файлами – адрес задачи на диске в ее исходном состоянии и адрес на диске, куда информация выгружа- ется из оперативной памяти, если ее вытесняет другая задача.
Когда говорят о процессах, то тем самым хотят отметить, что система поддерживает их обособленность: у каждого процесса имеется свое вирту- альное адресное пространство, каждому процессу назначаются свои ресурсы
– файлы, окна, семафоры и т.д. Такая обособленность нужна для того, чтобы защитить один процесс от другого, поскольку они, совместно используя все ресурсы вычислительной системы, конкурируют друг с другом. В общем случае процессы (задачи) никак не связаны между собой и могут принадле- жать даже разным пользователям, разделяющим одну вычислительную сис- тему. Другими словами, в случае процессов система считает их совершенно не связанными и не зависимыми. При этом именно система берет на себя роль арбитра в конкуренции между процессами по поводу ресурсов.
Желательно иметь возможность задействовать внутренний паралле- лизм, который может быть в самих процессах. Такой внутренний паралле- лизм встречается достаточно часто и его использование позволяет ускорить их решение. В однопроцессорной системе задачи разделяют между собой процессорное время так же, как это делают обычные процессы, а в мульти- процессорной системе могут выполняться одновременно, если не встречают конкуренции из-за обращения к иным ресурсам.
Таким образом, главное, что обеспечивает многопоточность, - это воз- можность параллельно выполнять несколько видов операций в одной при- кладной программе. Параллельные вычисления (а, следовательно, и более эффективное использование ресурсов центрального процессора, и меньшее суммарное время выполнения задач) теперь уже часто реализуются на уровне задач, и программа, оформленная в виде нескольких задач (потоков, нитей) в рамках одного процесса, может быть выполнена быстрее за счет параллель- ного выполнения ее отдельных частей.
3. Классы систем реального времени Количество операционных систем реального времени, несмотря на их специфику, очень велико. Сама специфика применения операционных систем реального времени требует гарантий надежности, причем гарантий, в том числе и юридических - этим, видимо, можно объяснить тот факт, что среди некоммерческих систем реального времени нет сколько-нибудь популярных.
Среди коммерческих систем реального времени можно выделить группу ведущих систем - по объемам продаж и по популярности. Это системы: VxWorks, OS-9, pSOS, LynxOS, QNX, VRTX. Различают следующие классы СРВ:
- исполнительные системы реального времени;
- ядра реального времени;
- UNIX'ы реального времени.
Исполнительные системы реального времени. Признаки систем этого типа - различные платформы для систем разработки и исполнения. Приложение реального времени разрабатывается на host- компьютере (компьютере системы разработки), затем компонуется с ядром и загружается в целевую систему для исполнения. Как правило, приложение реального времени -это одна задача и параллелизм здесь достигается с помощью нитей (threads).
Системы этого типа обладают рядом достоинств, среди которых ос- новным достоинством является высокая скорость и реактивность системы.
Главная причина высокой реактивности систем этого типа - наличие только нитей (потоков) и, следовательно, малое время переключения контекста между ними (в отличие от процессов). С этим главным достоинством связан и ряд недостатков:
зависание всей системы при зависании нити;
проблемы с динамической загрузкой новых приложений.
Кроме того, системы разработки для продуктов этого класса традици- онно дороги (порядка $20000). Однако, необходимо отметить, что качество и
функциональность систем разработки в этом классе традиционно являются хорошими.
Наиболее ярким представителем систем этого класса является опера- ционная система VxWorks. Область применения - компактные системы реального времени с хорошими временами реакций.
Ядра реального времени. В этот класс входят системы с монолитным ядром, где и содержится реализация всех механизмов реального времени этих операционных систем. Исторически системы этого типа были хорошо спроектированы. В отличие от систем других классов, разработчики систем этого класса имели время для разработки систем именно реального времени и не были изначально ограничены в выборе средств (например фирма "Microware" имела в своем распоряжении три года для разработки первого варианта OS-9). Системы этого класса, как правило, модульны, хорошо структурированы, имеют наиболее развитый набор специфических механизмов реального времени, компактны и предсказуемы. Наиболее популярные системы этого класса: OS-9, QNX.
Одна из особенностей систем этого класса - высокая степень масшта- бируемости. На базе этих ОС можно построить как компактные системы ре- ального времени, так и большие системы серверного класса.
UNIX'ы реального времени. Исторически системы реального време- ни создавались в эпоху расцвета и бума UNIX'а и поэтому многие из них со- держат те или иные заимствования из этой красивой концепции операцион- ный системы (пользовательский интерфейс, концепция процессов).
Часть разработчиков операционных систем реального времени попы- талась просто переписать ядро UNIX, сохранив при этом интерфейс пользовательских процессов с системой, насколько это было возможно. Реализация этой идеи не была слишком сложной, поскольку не было препятствия в доступе к исходным текстам ядра, а результат оказался замечательным. Получили и реальное время, и весь набор пользовательских приложений - компиляторы, пакеты, различные инструментальные системы.
В этом смысле создателям систем первых двух классов пришлось по- трудиться не только при создании ядра реального времени, но и продвинутых систем разработки.
Однако Unix'ы реального времени имеют следующие недостатки: сис- темы реального времени получаются достаточно большими и реактивность их ниже, чем реактивность систем первых двух классов.
Наиболее популярным представителем систем этого класса является операционная система реального времени Lynx OS.
Расширения реального времени для Windows NT. После появления Windows NT, сразу несколько фирм объявили о создании расширений реаль- ного времени для Windows NT. Этот означает, что подобные продукты были востребованы, что и подтверждает динамика их рыночного развития. Появ- ление в свое время UNIX'ов реального времени означало ни что иное, как попытку применить господствующую программную технологию для созда- ния приложений реального времени. Появление расширений реального вре-
мени для Windows NT имеет те же корни, ту же мотивацию. Огромный набор прикладных программ под Windows, мощный программный интерфейс
WIN32, большое количество специалистов, знающих эту систему. Соблазнительно было получить в системе реального времени все эти возможности.
Несмотря на то, что Windows NT создавалась как сетевая операцион- ная система, и сочетание слов "Windows NT" и "реальное время" многими воспринимается как нонсенс, в нее при создании были заложены элементы реального времени. Она имеет - двухуровневую систему обработки прерыва- ний (ISR и DPC), классы реального времени (процессы с приоритетами 16-32 планируются в соответствии с правилами реального времени). Причина по- явления этих элементов кроется в том, что у разработчиков Windows NT за плечами был опыт создания классической для своего времени операционной системы реального времени RSX11М (для компьютеров фирмы DEC).
Анализ возможностей Windows NT показывает, что эта система не го- дится для построения систем жесткого реального времени (система непред- сказуема - время выполнения системных вызовов и время реакции на преры- вания сильно зависит от загрузки системы; система велика; нет механизмов защиты от зависаний). Поэтому даже в системах мягкого реального времени Windows NT может быть использована, только при выполнении целого ряда рекомендаций и ограничений.
Разработчики расширений пошли двумя путями. Они использовали ядра классических операционных систем реального времени в качестве дополнения к ядру Windows NT. Таковы решения фирм "LP Eleknroniks" и "Radisys". В первом случае параллельно с Windows NT (на одном компьюте- ре) работает операционная система VxWorks, во-втором случае - InTime. Кроме того, предоставляется набор функций для связи приложений реально- го времени и приложений Windows NT. Вот как, например, это выглядит у LP Elektroniks: вначале стандартным образом загружается Windows NT, затем с помощью специального загрузчика загружается операционная система VxWorks, распределяя под себя необходимую память Windows (что в дальнейшем позволяет избежать конфликтов памяти между двумя ОС). После этого полной "хозяйкой" на компьютере уже становится VxWorks, отдавая процессор ядру Windows NT только в случаях, когда в нем нет надобности для приложений VxWorks. В качестве канала для синхронизации и обмена данными между Windows NT и VxWorks служат псевдодрайверы TCP/IP в обеих системах. Технология использования двух систем на одном компьютере следующая - работу с объектом выполняет приложение реального времени, передавая затем результаты приложениям Windows NT для обработки, передачи в сеть, архивирования.
Второй вариант расширений реального времени фирмы VenturCom выглядит иначе: здесь сделана попытка "интегрировать" реальное время в Windows NT путем исследования причин задержек и зависаний и устранения этих причин с помощью подсистемы реального времени. Решения фирмы "VenturCom" (RTX 4.2) базируются на модификациях уровня аппаратных аб-
стракций Windows NT (HAL - Hardware Abstraction Layer) - программного слоя, через который драйверы взаимодействуют с аппаратурой. Модифици- рованный HAL и дополнтельные функции (RTAPI) отвечают также за ста- бильность и надежность системы, обеспечивая отслеживание краха Windows NT, зависания приложений или блокировку прерываний. В состав RTX вхо- дит также подсистема реального времени RTSS, с помощью которой Windows NT расширяется дополнительным набором объектов (аналогичным стандартным, но с атрибутами реального времени). Среди новых объектов - нити (потоки, процессы) реального времени, которые управляются специ- альным планировщиком реального времени (256 фиксированных приорите- тов, алгоритм - приоритетный с вытеснением). Побочным результатом RTX является возможность простого создания программ управления устройства- ми, так как среди функций RTAPI есть и функции работы с портами ввода- вывода и физической памятью. Решения VenturCom характерны еще и тем, что они предоставляют для NT возможность конфигурирования Windows NT и создания встроенных конфигураций (без дисков, клавиатуры и монитора, интегратор компонентов - CI).
Несмотря на всю неоднозначность отношения традиционных пользо- вателей систем реального времени ко всему, что связано с "Microsoft", необ- ходимо констатировать факт: появился новый класс операционных систем реального времени - а именно расширения реального времени для Windows NT. Результаты независимых тестирований этих продуктов показывают, что они могут быть в перспективе использованы для построения систем жесткого реального времени после соответствующей доработки. Область применения расширений реального времени - большие системы реального времени, где требуется визуализация, работа с базами данных, доступ в Интернет и пр.
Лекция 2.1. Методы и средства обработки асинхронных событий
1. Обобщенная функциональная структура информационного тракта СРВ и устройства связи с объектом.
2. Средства обработки асинхронных событий.
3. Принципы функционирования интерфейса.
4. Программное обеспечение интерфейса.
5. Аппаратные средства интерфейса.
1. Обобщенная функциональная структура информационного тракта СРВ и устройства связи с объектом
Из всего состава функциональных устройств СРВ, образующих информационный тракт системы, рассмотрим только те, которые осуществляют функции сбора, предварительной обработки, представления, передачи и обработки информации. Блок-схема обобщенной функциональной структуры информационного тракта и устройства связи с объектом представлены на рис. 1.
На вход системы поступает в общем случае аналоговый сигнал S(t), сформированный информационным устройством (или датчиком), являющим- ся источником данных. Сигнал S(t) рассматривается как реализация случай- ного процесса. Цепь преобразования данных одного устройства (или датчи- ка) в многоканальной системе образует измерительный канал.
В блоке подготовки сигнал подвергается предварительной аналоговой обработке – согласованию, усилению (приведение амплитуды к динамиче- скому диапазону устройством выборки и хранения – УВХ), полосовой фильтрации (ограничение полосы частот сигналов для корректной оцифров- ки).
Поскольку подсистема обработки является цифровой системой, то ка- ждый сигнал подвергается процедуре аналого-цифрового преобразования в модуле АЦП. Последовательность отсчетов от различных измерительных каналов объединяется в общий поток для последующего ввода в компьютер или передачи по каналу связи. В ряде случаев могут применяться устройства сжатия данных (либо сжатие осуществляется после ввода данных в компью- тер – программные методы сжатия). Состав и последовательность располо- жения функциональных устройств в различных СРВ может отличаться от приведенной в блок-схеме. Но, характерным является наличие данных уст- ройств, как типовых в системах различного назначения и технического во- площения.
Подсистема передачи включает кодер и декодер канала связи, пере- дающее и приемное устройства и собственно канал связи (среда с антенными устройствами). Кодер и декодер осуществляют помехоустойчивое кодирова- ние и декодирование сигналов с целью дополни дополнительной защиты пе- редаваемых сообщений от помех в канале связи и могут отсутствовать при наличии качественного канала.
Восстановление исходного аналогового сообщения по цифровым от- счетам с допустимой погрешностью производится на приемной стороне. В современных системах восстановление непрерывного сообщения, как прави- ло, не выполняется, поскольку регистрация, хранение и обработка информа- ции выполняются в цифровом виде, но принципиальная возможность восста- новления предусматривается.
Одна из задач подсистемы цифровой обработки, которая выполняется с использованием ресурсов компьютера и специализированных процессоров цифровой обработки – сортировка информации и отбраковка аномальных ре- зультатов наблюдений. Отбраковка является частным случаем более общей задачи – фильтрации сигналов от помех или использования методов распо- знавания образов. Другими задачами подсистемы обработки являются:
предварительная обработка данных (сглаживание, удаление тренда); статистическая обработка сигналов (применяются различные алгорит-
мы в зависимости от назначения СРВ); спектральная обработка;
формирование моделей процессов и явлений;
представление результатов предварительной обработки или анализа;
хранение данных.
Исходная информация для последующего анализа исследуемого явле- ния (или объекта) формируется с помощью средств проведения эксперимен- та, представляющих собой совокупность средств измерений различных типов (измерительных устройств, преобразователей, датчиков и принадлежностей к ним), каналов передачи информации и вспомогательных устройств для обес- печения условий проведения эксперимента. В различных предметных облас- тях совокупность средств для проведения эксперимента может называться по-разному (например, экспериментальная установка, информационно- измерительная система, измерительная система). В дальнейшем будем поль- зоваться термином "измерительная система" (ИС). В зависимости от целей эксперимента иногда различают измерительные информационные (исследо- вание), измерительные контролирующие (контроль, испытание) и измери- тельные управляющие (управление, оптимизация) системы, которые разли- чаются в общем случае как составом оборудования, так и сложностью обра- ботки экспериментальных данных.
 |
Рисунок 1. - Обобщенная блок-схема функциональной структуры информа- ционного тракта и устройство связи с объектом
2. Средства обработки асинхронных событий
Состав средств измерений, входящих в измерительную систему и вы- полняющих функции датчиков сигналов, формирователей воздействий на ис- следуемый объект, в существенной степени определяется задачами экспери- мента, которые ставятся при его планировании. То же самое можно сказать и о предварительном выборе методов обработки экспериментальных данных, которые могут в дальнейшем уточняться по мере получения эксперимен- тальной информации об объекте исследования и условиях проведения экспе- римента.
В связи с возрастанием сложности экспериментальных исследований (это проявляется в увеличении числа измеряемых величин, большом количе-
стве информационных каналов, повышении требований к качеству регистри- руемой информации и оперативности ее получения) в состав современных измерительных систем включаются вычислительные средства различных классов. Эти средства (мини-ЭВМ, персональные компьютеры, специализи- рованные вычислители и контроллеры) не только выполняют функции сбора и обработки экспериментальной информации, но и решают задачи управле- ния ходом эксперимента, автоматизации функционирования измерительной системы, хранения измерительных данных и результатов анализа, графиче- ской поддержки режимов контроля, представления и анализа.
Таким образом, современные средства проведения эксперимента пред- ставляют собой измерительно-вычислительные системы или комплексы, снабженные развитыми вычислительными средствами (в последнее время все чаще многопроцессорные). При обосновании структуры и состава ИС необ- ходимо решить следующие основные задачи:
определить состав измерительного оборудования (датчики, устройства согласования, усиления, фильтрации, калибровки);
выбрать тип и характеристики компьютера, входящего в состав ИС (сейчас, как правило, персональный компьютер);
выбрать тип оборудования, выполняющего сбор данных и цифровую обработку сигналов;
адаптировать каналы связи между компьютером, оборудованием сбора данных (интерфейс), измерительными устройствами и потребителем информации;
разработать программное обеспечение ИС.
При выборе компьютера необходимо учитывать требования по опера- тивности получения результатов экспериментов, сложность алгоритмов об- работки экспериментальных данных и объем получаемой информации. Это позволит оценить требуемую производительность процессора, емкость и ха- рактеристики ОЗУ и жестких дисков, характеристики видеосистемы.
Известно два подхода к обеспечению ввода аналоговых измерительных сигналов для последующей обработки с использованием цифровых методов. Первый подход основан на применении специализированных комплексных систем, в состав которых входит аппаратура аналого-цифрового преобразования, микропроцессорные средства цифровой обработки и устройства отображения информации. Второй подход основан на применении интерфейсных устройств сбора данных и универсальных компьютерных систем.
Примером специализированной системы является многоканальный анализатор сигналов SA 3550 фирмы Brüel & Kjær. Данный прибор выполня- ет следующие функции:
анализ сигналов и систем (механических, электрических, электромеханических);
структурные и модальные испытания с несколькими входами и выхо- дами с помощью случайных сигналов и испытания с учетом собственных мод колебаний;
отыскание неисправностей механических систем и их компонент с возможностью изменения форм операционных деформаций;
анализ сервомеханизмов и сервосистем;
анализ и испытания в программах контроля качества; анализ акустических и электроакустических систем; измерения и анализ интенсивности звука; исследования в целях борьбы с шумом.
Другим примером специализированной системы является многока- нальный спектральный анализатор SI 1220 фирмы Schlumberger Technologies. Данный прибор позволяет выполнять многоканальный мониторинг конст- рукций, исследование резонансных явлений, структурный анализ, тестирова- ние и балансировку машинного оборудования, частотный анализ сигналов и нелинейных цепей, исследование речи.
К недостаткам такого подхода построения измерительных систем можно отнести: ограничения на количество входных сигналов и их характеристики; жесткая структура алгоритмов обработки, не допускающая разработку программ анализа под конкретную задачу; ограниченные возможности графического представления результатов; высокая стоимость измерительных систем.
Второй подход основан на применении дополнительных интерфейсных модулей и цифровых процессоров сигналов в составе персонального компьютера. Существенными преимуществами второго подхода являются: гибкость измерительной системы при реализации различных алгоритмов обработки; функциональная полнота системы (решаются задачи ввода данных, обработки, управления, анализа, хранения измерительных данных и результатов анализа); хорошие метрологические характеристики и возможность тиражирования разработанных систем.
Перспективной является тенденция построения ИС на базе типовых микропроцессорных средств, что обеспечивает массовость их применения. Стратегия создания таких систем состоит в объединении регистрирующих датчиков, аппаратуры сбора данных и цифровой обработки сигналов, а также средств программного обеспечения в единую информационную систему.
Большое значение для рассматриваемых ИС имеют обеспечение функ- циональной гибкости в части управления, выбора метода исследования и развитый пользовательский интерфейс. Для реализации таких свойств разрабатывается мощная полиэкранная графическая поддержка с использованием популярных в последнее время объектной метафоры и комбинированных методов представления информации (текст, графика, звук, видео).
Целевое назначение рассматриваемых ИС связано с регистрацией, об- работкой и анализом данных физических и инженерных измерений, а также созданием баз экспериментальных данных для исследования методов инфор- мационного обеспечения измерительных задач.
В качестве базового элемента ИС может быть выбран ПК с процессо- ром i486 или Pentium с шиной стандарта ISA (или ISA/PCI). К дополнитель- ному оборудованию ИС следует отнести (рис.2.):
 |
Рисунок 2. - Блок-схема измерительной системы
ция);
датчики физических параметров;
блок подготовки аналоговых сигналов (усиление, полосовая фильтра-
интерфейсные средства ввода-вывода аналоговых сигналов (модули
АЦП и ЦАП);
модуль цифрового процессора сигналов.
Элементы системы связаны между собой на физическом и (или) логи- ко-функциональном уровне.
Ввод данных в ИС реализуется аппаратными средствами подсистемы сбора данных, а управляет процессом сбора пользователь, используя экран- ные формы интерфейса.
Структура ИС, приведенная на рис. 2, обеспечивает выполнение сле- дующих основных задач:
автоматизированный синхронный ввод в ПК сигналов, регистрируемых группой датчиков;
вывод аналоговых сигналов в соответствии с аналитической моделью (например для калибровки);
обработка записанных на жесткий диск данных с помощью методов цифровой обработки сигналов (ЦОС) для изучения состояния физических объектов и исследования протекающих процессов;
графическое представление регистрируемой информации и результатов анализа;
хранение экспериментальных данных и результатов обработки. Частотный диапазон сигналов, количество параллельных информаци-
онных каналов и динамический диапазон сигналов на входе определяют тех- нические требования к системе. Технические требования являются основны- ми исходными данными при выборе структуры измерительной системы (ИС) и разработке алгоритмов ввода многоканальных аналоговых сигналов в пер- сональный компьютер. Типовые требования к ИС:
количество синхронных входных каналов 16; частотный диапазон входных сигналов 10-30000 Гц; разрядность АЦП/ЦАП 12-16 бит;
время преобразования АЦП 2.5-10 мкс; порт ввода – вывода 8 бит ТТЛ; динамический диапазон по входу 60-80 ДБ.
Программное обеспечение должно выполнять следующие функции: настройка параметров и запуск процедуры сбора данных;
запись собираемых данных в оперативную память или на жесткий диск с отображением характера регистрируемых сигналов и временного изменения параметров на экране дисплея;
графический пользовательский интерфейс со средствами функцио- нальной помощи;
реализация вычислительных алгоритмов цифровой обработки сигналов с отображением результатов комбинированными средствами представления информации;
выполнение калибровки передаточных характеристик физико- информационных преобразователей и аналоговых цепей;
поддержка базы экспериментальных данных о характеристиках объек- тов испытаний.
При разработке программного обеспечения используются следующие принципы: модульность, использование объектной метафоры в управлении, унификация связей, разделение программ управления, графической под- держки, обработки и доступа к базе данных.
3. Принципы функционирования интерфейса
Существует несколько методов реализации интерфейса АЦП – процессор ПК.
Схема ―самых последних данных‖. В этом методе реализации интер- фейса АЦП работает непрерывно. В конце каждого цикла преобразования он обновляет данные в выходном буферном регистре и затем автоматически на- чинает новый цикл преобразования. Микропроцессор просто считывает со- держимое этого буфера, когда ему нужны самые последние данные. Этот ме- тод подходит для тех применений, где необходимость в обновлении данных возникает лишь от случая к случаю.
Схема ―запуска-ожидания‖. Микропроцессор инициирует выполнение преобразования каждый раз, когда ему нужны новые данные, и затем непре-
рывно тестирует состояние АЦП, чтобы узнать, закончилось ли преобразование. Зафиксировав конец преобразования, он считывает выходное слово преобразователя. В возможной модификации этого метода микропроцессор находится в состоянии ожидания в течение интервала времени, превышающего предполагаемое время преобразования, и затем считывает выходные данные. Этот метод несколько проще в реализации, но при этом микропроцессор отвлекается от выполнения всех других программ на время преобразования.
Использование прерывания микропроцессора. Этот метод основан на возможности использования системы прерываний микропроцессора. Как и в предыдущей схеме, процессор или таймер запускают преобразователь, но за- тем микропроцессор может продолжать выполнение других заданий. Когда преобразование завершено, АЦП вызывает прерывание микропроцессора. Микропроцессор прекращает выполнение текущей программы и сохраняет всю необходимую информацию для последующего восстановления этой про- граммы. Затем он осуществляет поиск и использование ряда команд (обслу- живающая программа – обработчик прерывания), предназначенных для вы- борки данных от АЦП. После того как обслуживающая программа выполне- на, микропроцессор возвращается к выполнению исходной программы.
Задача поиска обслуживающей программы иногда решается путем вы- полнения другой программы (программы или процедуры последовательного опроса – поллинга), которая определяет источник прерывания путем после- довательной проверки всех возможных источников. Гораздо эффективнее подход, связанный с использованием векторных прерываний. Этот подход основан на хранении адресов отдельных обслуживающих программ в заранее определенной области памяти, называемой векторной таблицей. В ответ на сигнал прерывания микропроцессор теперь обращается к определенной ячейке памяти, в которую пользователем занесен адрес соответствующей об- служивающей программы. Реальная эффективность этого метода проявляется в системах с большим числом источников прерываний, как в случае IBM PC. В таких системах, как правило, используется специальное устройство, называемое контроллером прерываний. Контроллер прерываний, например Intel 8259А (другие семейства микропроцессоров имеют эквивалентные уст- ройства), организует различные приходящие сигналы прерываний в приори- тетные очереди (выстраивает в порядке их значимости), посылает сигнал прерывания в микропроцессор и указывает ему на нужную ячейку в вектор- ной таблице.
4. Программное обеспечение интерфейса
Передача данных между АЦП и микропроцессором на программном уровне может быть организована тремя способами.
Передача через пространство основной памяти. При распределении памяти АЦП присваивается некоторый адрес в пространстве основной памяти, не используемый для фактического хранения данных и программ. Передача данных между АЦП и микропроцессором осуществляется путем обращения к АЦП просто как к ячейке памяти с данным адресом. Однако
помимо уменьшения полезного пространства памяти такой подход может привести к усложнению управления памятью и, как правило, требует использования дополнительных аппаратных средств дешифрации адреса, поскольку при минимуме этих средств, слишком расточительно используется память.
Передача через пространство подсистемы ввода – вывода (ВВ). В некоторых системах создается отдельный набор адресов для подсистемы ВВ (пространство ВВ), которые могут совпадать по численным значениям с ад- ресами ячеек основной памяти, но отличаются от них с помощью использо- вания специальных управляющих сигналов (IOR и IOW), выдаваемых на сис- темную шину PC. Отделение пространства памяти от пространства ВВ улуч- шает характеристики системы. Как правило, это позволяет довольно просто осуществлять дешифрацию адреса с использованием минимального количе- ства аппаратных средств, поскольку ―приносится в жертву‖ пространство ВВ, а не очень ценное пространство основной памяти.
Прямой доступ к памяти (ПДП). Если возникает необходимость только в простой передаче данных между памятью и каким-либо периферийным устройством, включение в интерфейс регистра - аккумулятора микропроцессора неоправданно уменьшает скорость передачи данных. Используя дополнительные аппаратные средства, обычно в виде специального устройства, называемого контроллером ПДП, можно осуществлять непосредственную передачу данных с гораздо большей скоростью. Большинство микропроцессоров допускает реализацию ПДП путем передачи управления системной шиной на определенный промежуток времени контроллеру ПДП. Контроллер ПДП в течение этого промежутка времени управляет работой шины (захватывает шину) и обеспечивает передачу данных путем генерации соответствующих адресов и управляющих сигналов. Затем управление системной шиной передается обратно микропроцессору. Для передачи всех данных может потребоваться несколько таких ПДП-циклов. ПДП эффективен в тех применениях, где нужно обеспечить высокую скорость передачи данных или нужно передавать большие объемы данных. Применение этого метода в системах сбора данных в принципе возможно, но характерно только для систем с высокими рабочими параметрами. На системной плате PC имеется восьмика-нальный контроллер ПДП, который выполняет некоторые системные функции, включая регенерацию памяти и обмен информацией с диском.
5. Аппаратные средства интерфейса
Характер использования аппаратных средств в сильной степени зави- сит от того, в какой форме представляются данные – в последовательной, или в параллельной.
Параллельная форма представления данных. Аппаратные средства па- раллельного интерфейса почти всегда включают буфер с тремя состояниями (тристабильный буфер), через который АЦП подключается к шине данных микропроцессора. Дешифрованный адрес и вырабатываемый микропроцес- сором управляющий сигнал (строб) чтения используются для отпирания это-
го буфера и передачи данных от АЦП к микропроцессору. Тот же самый адрес и вырабатываемый микропроцессором управляющий сигнал записи ис- пользуются для запуска преобразователя. В общем случае, наличие отдель- ных управляющих сигналов чтения и записи необязательно, но такой подход позволяет использовать один и тот же адрес при передаче команд к АЦП и считывании данных с выхода АЦП.
В большинстве АЦП нового поколения тристабильные буферы вместе со своими управляющими схемами находятся на самом кристалле. Такие АЦП можно непосредственно подключать к шине данных микропроцессора. Для сопряжения этих устройств с процессором пользователь должен только обеспечить дешифрованный адрес и ввести несколько логических элементов для согласования управляющих сигналов.
Последовательная форма представления данных. Последовательная форма представления данных естественна для систем, в которых использует- ся последовательная передача данных на большие расстояния к станциям контроля (диспетчерским станциям). По экономическим показателям исклю- чительно эффективным средством реализации такой передачи данных явля- ется асинхронная последовательная передача с использованием специализи- рованных или телефонных линий с модемами на каждом конце линии. Аппа- ратные средства интерфейса со стороны микропроцессора, обычно находя- щегося на станции контроля, чаще всего представлены в виде специального устройства, называемого универсальным асинхронным приемопередатчиком (УАПП). УАПП принимает и передает данные в последовательной форме, но обменивается этими данными с микропроцессором через параллельный ин- терфейс. Для каждого микропроцессора имеется, по меньшей мере, один со- вместимый с ним УАПП. Интерфейс на том конце линии передачи, где нахо- дится АЦП, в сильной степени зависит от выбора АЦП, и его лучше всего рассматривать отдельно в каждом конкретном случае. Наблюдается тенден- ция к размещению большинства обеспечивающих интерфейс схем на самом кристалле АЦП.
Cопряжение 10- или 12-разрядного АЦП с 8-разрядной шиной данных довольно просто решается путем передачи данных порциями по 8 бит (1 байт) одна за другой. Этот способ пригоден как для параллельного, так и для последовательного интерфейсов.
1. Переключение контекста.
2. Прерывания.
1. Переключение контекста
Рассмотрим сущность понятия «переключение контекста».
Контекст задачи - это набор данных, задающих состояние процессо- ра при выполнении задачи. Он обычно совпадает с набором регистров, дос- тупных для изменения прикладной задачи. В системах с виртуальной памя- тью может включать регистры, отвечающие за трансляцию виртуального
адреса в физический (обычно доступны на запись только операционной сис- теме).
Переключение задач - это переход процессора от исполнения одной задачи к другой. Может быть инициировано:
1. Планировщиком задач (например, освободился ресурс и в очередь готовых задач попала ожидавшая его приоритетная задача),
2. Прерыванием (аппаратным прерыванием, например, запрос на об- служивание от внешнего устройства),
3. Исключением (программным прерыванием, например, системный вызов).
Поскольку контекст полностью определяет, какая задача будет вы- полняться, то часто термины «переключение задач» и «переключение кон- текста» употребляют как синонимы.
Диспетчер (dispatcher) - это модуль (программа), отвечающий за пере- ключение контекста.
При переключении задач диспетчеру необходимо: 1) корректно остановить работающую задачу, для этого необходимо: а) выполнить инструкции текущей задачи, уже загруженные в процессор, но еще не выполненные (современные процессоры имеют внутри себя конвейеры инструкций, куда могут загружаться более 10 инструкций, некоторые из которых могут быть сложными, например, записать в память 32 регистра), обычно это делается аппаратно;
б) сохранить в оперативной памяти регистры текущей задачи;
2) найти, подготовить и загрузить затребованную задачу (обработчик прерываний - в этом случае требуется еще установить источник прерывания);
3) запустить новую задачу, для этого:
а) восстановить из оперативной памяти регистры новой задачи (со- храненные ранее, если она до этого уже работала);
б) загрузить в процессор инструкции новой задачи (современные про- цессоры начинают выполнять инструкции только после загрузки конвейера), эта фаза делается аппаратно.
Каждая из этих стадий вносит свой вклад в задержку при переключе- нии контекста. Поскольку любое приложение реального времени должно обеспечить выдачу результата в заданное время, то эта задержка должна быть мала, детерминирована и известна. Это число является одной из важнейших характеристик ОСРВ.
2. Прерывания
Прерывания являются основным источником сообщения внешним устройствам о готовности данных или необходимости передачи данных. По самому назначению систем реального времени, прерывания являются одним из основных объектов в ОСРВ.
Время реакции на прерывание - это время переключения контекста от текущей задачи к процедуре обработки прерывания. В многозадачных сис- темах время ожидания прерывания (события) может быть использовано
другой задачей. Прерывание может произойти во время обработки систем- ного вызова и во время критической секции.
Рассмотрим суть понятия прерывания.
Прерывания представляют собой механизм, позволяющий координи- ровать параллельное функционирование отдельных устройств вычисли- тельной системы и реагировать на особые состояния, возникающие при работе процессора. Таким образом, прерывание - это принудительная передача управления от выполняемой программы к системе (а через нее - к соответствующей программе обработки прерывания), происходящая при возникновении определенного события. Идея прерываний была предложена в середине 50-х годов и можно без преувеличения сказать, что она внесла наиболее весомый вклад в развитие вычислительной техники. Основная цель введения прерываний - реализация асинхронного режима работы и распараллеливание работы отдельных устройств вычислительного комплМекесхаа.низм прерываний реализуется аппаратно-программными средствами. Структуры систем прерывания (в зависимости от аппаратной архитектуры) могут быть самыми разными, но все они имеют одну общую особенность - прерывание непременно влечет за собой изменение порядка выполнения команд процессором.
Механизм обработки прерываний независимо от архитектуры вычис- лительной системы включает следующие элементы:
1. Установление факта прерывания (прием сигнала на прерывание) и идентификация прерывания.
2. Запоминание состояния прерванного процесса. Состояние процесса определяется, прежде всего, значением счетчика команд (адресом следующей команды, который, например, в i80x86 определяется регистрами CS и IP – указателем команды, содержимым регистров процессора и может включать также спецификацию режима, например, режим пользовательский или привилегированный) и другую информацию.
3. Управление аппаратно передается подпрограмме обработки преры- вания. В простейшем случае в счетчик команд заносится начальный адрес
подпрограммы обработки прерываний, а в соответствующие регистры
- информация из слова состояния. В более развитых процессорах осуществляется достаточно сложная процедура определения начального адреса соответствующей подпрограммы обработки прерывания, и не менее сложная процедура инициализации рабочих регистров процессора.
4. Сохранение информации о прерванной программе, которую не уда- лось спасти на шаге 2 с помощью действий аппаратуры. В некоторых вы- числительных системах предусматривается запоминание довольно большого объема информации о состоянии прерванного процесса.
5. Обработка прерывания. Эта работа может быть выполнена той же подпрограммой, которой было передано управление на шаге 3, но в ОС чаще всего она реализуется путем последующего вызова соответствующей подпрограммы.
6. Восстановление информации, относящейся к прерванному процессу (этап, обратный шагу 4).
7. Возврат в прерванную программу.
Шаги 1 - 3 реализуются аппаратно, а шаги 4 - 7 - программно.
На рис. 1 показано, что при возникновении запроса на прерывание ес- тественный ход вычислений нарушается и управление передается программе обработки возникшего прерывания. При этом средствами аппаратуры сохраняется (как правило, с помощью механизмов стековой памяти) адрес той команды, с которой следует продолжить выполнение прерванной про- граммы. После выполнения программы обработки прерывания управление возвращается прерванной ранее программе посредством занесения в указа- тель команд сохраненного адреса команды. Однако такая схема используется только в самых простых программных средах. В мультипрограммных системах обработка прерываний происходит по более сложным схемам.
Главными функциями механизма прерываний являются:
- распознавание или классификация прерываний;
- передача управления соответственно обработчику прерываний;
- корректное возвращение к прерванной программе.
 |
Рисунок 1. - Обработка прерывания
Переход от прерываемой программы к обработчику и обратно должен выполняться как можно быстрее. Одним из быстрых методов является ис- пользование таблицы, содержащей перечень всех допустимых прерываний и
адреса соответствующих обработчиков. Для корректного возвращения к прерванной программе перед передачей управления обработчику прерываний содержимое регистров процессора запоминается либо в памяти с прямым доступом, либо в системном стеке. Прерывания, возникающие при работе вычислительной системы, разделяются на два основных класса: внешние (асинхронные) и внутренние (синхронные).
Внешние прерывания вызываются асинхронными событиями, кото- рые происходят вне прерываемого процесса, например:
прерывания от таймера;
прерывания от внешних устройств (прерывания по вводу/выводу); прерывания по нарушению питания;
прерывания с пульта оператора вычислительной системы;
прерывания от другого процессора или другой вычислительной сис-
темы.
Внутренние прерывания вызываются событиями, которые связаны с
работой процессора и являются синхронными с его операциями. Примерами являются следующие запросы на прерывания:
при нарушении адресации (в адресной части выполняемой команды указан запрещенный или несуществующий адрес, обращение к отсутствующему сегменту или странице при организации механизмов виртуальной памяти);
при наличии в поле кода операции незадействованной двоичной ком- бинации;
при делении на нуль;
при переполнении или исчезновении порядка;
при обнаружении ошибок четности, ошибок в работе различных уст- ройств аппаратуры средствами контроля.
Могут существовать прерывания при обращении к супервизору ОС -в некоторых компьютерах часть команд может использовать только ОС, а не пользователи. Соответственно в аппаратуре предусмотрены различные режимы работы, и пользовательские программы выполняются в режиме, в котором эти привилегированные команды не исполняются. При попытке использовать команду, запрещенную в данном режиме, происходит внутреннее прерывание, и управление передается супервизору ОС. К привилегированным командам относятся и команды переключения режима работа центрального процессора.
Наконец, существуют собственно программные прерывания.Эти прерывания происходят по соответствующей команде прерывания, то есть по этой команде процессор осуществляет практически те же действия, что и при обычных внутренних прерываниях. Данный механизм был специально вве- ден для того, чтобы переключение на системные программные модули про- исходило не просто как переход в подпрограмму, а точно таким же образом, как и обычное прерывание. Этим обеспечивается автоматическое переключе- ние процессора в привилегированный режим с возможностью исполнения любых команд.
Сигналы, вызывающие прерывания, формируются вне процессора или в самом процессоре; они могут возникать одновременно. Выбор одного из них для обработки осуществляется на основе приоритетов, приписанных каждому типу прерывания. Очевидно, что прерывания от схем контроля процессора должны обладать наивысшим приоритетом (если аппаратура работает неправильно, то не имеет смысла продолжать обработку информации). На рис. 2 изображен обычный порядок обработки прерываний в зависимости от типа прерываний. Учет приоритета может быть встроен в технические средства, а также определяться операционной системой, то есть кроме аппаратно реализованных приоритетов прерывания большинство вычислительных машин и комплексов допускают программно-аппаратное управление порядком обработки сигналов прерывания. Второй способ, дополняя первый, позволяет применять различные дисциплины обслуживания прерываний.
Рисунок 2. - Распределение прерываний по уровням приоритета
Программное управление специальными регистрами маски (маскиро- вание сигналов прерывания) позволяет реализовать различные дисциплины обслуживания:
с относительными приоритетами, то есть обслуживание не прерывается даже при наличии запросов с более высокими приоритетами. После окончания обслуживания данного запроса обслуживается запрос с наивысшим приоритетом. Для организации такой дисциплины необходимо в программе обслуживания данного запроса наложить маски на все остальные сигналы прерывания или просто отключить систему прерываний;
с абсолютными приоритетами, то есть всегда обслуживается прерывание с наивысшим приоритетом. Для реализации этого режима необходимо на время обработки прерывания замаскировать все запросы с более низким приоритетом. При этом возможно многоуровневое прерывание, то есть прерывание программ обработки прерываний. Число уровней прерывания в этом режиме изменяется и зависит от приоритета запроса;
по принципу стека, или, как иногда говорят, по дисциплине LСFS (lаst соmе first sегvеd - последним пришел - первым обслужен), то есть запросы с более низким приоритетом могут прерывать обработку прерывания с более высоким приоритетом. Дли этого необходимо не накладывать маски ни на один сигнал прерывания и не выключать систему прерываний.
Следует особо отметить, что для правильной реализации последних двух дисциплин нужно обеспечить полное маскирование системы прерываний при выполнении шагов 1-4 и 6-7. Это необходимо для того, чтобы не потерять запрос и правильно его обслужить. Многоуровневое прерывание должно происходить на этапе собственно обработки прерывания, а не на этапе перехода с одного процесса на другой.
Управление ходом выполнения задач со стороны ОС заключается в организации реакций на прерывания, в организации обмена информацией (данными и программами), предоставлении необходимых ресурсов, в дина- мике выполнения задачи и в организации сервиса. Причины прерываний оп- ределяет ОС (модуль, который называют супервизором прерываний), она же и выполняет действия, необходимые при данном прерывании и в данной си- туации. Поэтому в состав любой ОС реального времени, прежде всего, вхо- дят программы управления системой прерываний, контроля состояний задач и событий, синхронизации задач, средства распределения памяти и управления ею, а уже потом средства организации данных (с помощью файловых систем и т. д.). Cовременная ОС реального времени должна вносить в аппаратно-программный комплекс нечто большее, нежели просто обеспечение быстрой реакции на прерывания.
При появлении запроса на прерывание система прерываний иденти- фицирует сигнал и, если прерывания разрешены, управление передается на соответствующую подпрограмму обработки. Из рис.1 видно, что в подпро- грамме обработки прерывания имеются две служебные секции. В первой секции осуществляется сохранение контекста прерванной задачи, который не
смог быть сохранен на 2-м шаге, и последняя, заключительная секция, в которой, наоборот, осуществляется восстановление контекста. Чтобы система прерываний не среагировала повторно на сигнал запроса на прерывание, она обычно автоматически «закрывает» (отключает) прерывания, поэтому необходимо потом в подпрограмме обработки прерываний вновь включать систему прерываний. Установка рассмотренных режимов обработки прерываний осуществляется в конце первой секции подпрограммы обработки. Таким образом, на время выполнения центральной секции прерывания разрешены. На время работы заключительной секции подпрограммы обработки система прерываний должна быть отключена, и после восстановления контекста вновь включена. Поскольку эти действия необходимо выполнять практически в каждой подпрограмме обработки прерываний, во многих операционных системах первые секции подпрограмм обработки прерываний выделяются в специальный системный программный модуль, называемый супервизором прерываний.
Супервизор прерываний, прежде всего, сохраняет в дескрипторе теку- щей задачи рабочие регистры процессора, определяющие контекст прерывае- мого вычислительного процесса. Далее он определяет ту подпрограмму, ко- торая должна выполнить действия, связанные с обслуживанием текущего за- проса на прерывание. Перед тем как передать управление этой подпрограмме, супервизор прерываний устанавливает необходимый режим обработки прерывания. После выполнения подпрограммы обработки прерывания управление вновь передается супервизору, на этот раз уже на тот модуль, который занимается диспетчеризацией задач. И уже диспетчер задач, в свою очередь, в соответствии с принятым режимом распределения процессорного времени восстановит контекст той задачи, которой будет решено выделить процессор. В данном случае нет непосредственного возврата в прерванную ранее программу прямо из самой подпрограммы обработки прерывания. Для прямого непосредственного возврата достаточно адрес возврата сохранить в стеке, что и делает аппаратура процессора. При этом стек легко обеспечивает возможность возврата в случае вложенных прерываний, поскольку он всегда реализует дисциплину (последним пришел
– первым обслужен).
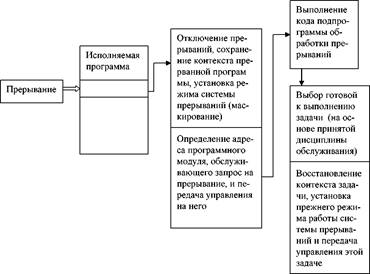
Рисунок 3. - Обработка прерывания с использованием супервизора прерываний
Однако если бы контекст процессов сохранялся в стеке, как это обычно реализуется аппаратурой, а не в описанных выше дескрипторах задач, то не было бы возможности гибко подходить к выбору той задачи, которой нужно передать процессор после завершения работы подпрограммы обработки прерывания. Это только общий принцип. В конкретных процессорах и в конкретных ОС могут существовать некоторые отступления от рассмотренной схемы и/или дополнения к ней. Например, в современных процессорах часто имеются специальные аппаратные возможности для сохранения контекста прерываний.
1. Однопроцессорная и распределенная архитектуры.
2. Функции операционных систем в среде реального времени.
3. Управление процессором и состояния процесса.
4. Стратегии выбора процесса.
1. Однопроцессорная и распределенная архитектуры Рассмотрим распределенные системы (distributed systems), которые по своей природе больше подходят для управления сложными процессами. К основным преимуществам распределенных систем относятся:
- экономичность;
- надежность (при отказе нескольких процессоров остальные продол- жают работать);
- возможность подобрать аппаратные средства в соответствии с кон- кретными требованиями.
Говоря о распределенной системе, необходимо иметь в виду, каким способом достигается распределение ресурсов. Одна крайность - когда един- ственным общим ресурсом является сеть, соединяющая ЭВМ, каждая из ко- торых работает независимо и лишь обменивается сообщениями с остальны-
ми. Другая крайность - реально распределенная сетевая операционная систе- ма, предоставляющая пользователю гомогенную среду, не зависящую от ап- паратной платформы. Пользователь может вводить произвольные команды, а операционная система находит наиболее подходящий способ и место их вы- полнения.
Распределенные системы используются в управлении процессами, по- скольку эти приложения являются принципиально распределенными и такая архитектура обеспечивает более полное соответствие между аппаратными и программными средствами и управляемым объектом. Сложный технологиче- ский процесс можно разбить на несколько уровней, на каждом из которых собираются и обобщаются (агрегируются) данные, передающиеся на более высокие уровни. Такой тип распределенной системы более экономичен, чем централизованная система с одним процессором, она надежна в том смысле, что отказ одного из компонентов не нарушает работу других (при условии, что система хорошо структурирована), и ее можно построить таким образом, чтобы она в максимальной степени соответствовала управляемому процессу.
Однако чисто аппаратный подход к надежности не решает всех про- блем. В распределенной системе процессы, исполняющиеся на разном обо- рудовании, зависят и друг от друга, и от коммуникаций. Если процесс или оборудование в одном узле перестанет работать или возникнут проблемы с коммуникациями, то остановится исполнение не только конкретного процес- са, но и процессов, зависящих от него, потому, например, что они ждут отве- та на свои вопросы.
По сравнению с централизованными - распределенные системы требу- ют принципиально иных программных средств, поскольку такие системы тесно связаны сетью. Сетевая операционная система должна управлять как ресурсами отдельных ЭВМ, так и всей сети. Поэтому функции операционной системы нельзя отделять от функциональных свойств сети, а работа сети ока- зывает заметное влияние на работу распределенной системы. Фактически се- тевые операционные системы имеют многоуровневую структуру, аналогично стеку коммуникационных протоколов.
Главным различием между однопроцессорной и распределенной архи- тектурами является способ обмена информацией между процессами. Эта процедура наиболее важна при мультипрограммировании и программирова- нии в реальном времени. В однопроцессорной конфигурации обмен данными между процессами происходит через общую локальную память, очередность доступа к которой регулируется многозадачной операционной системой.
В отличие от этого, в распределенной системе нет общей памяти как таковой, и процессы обмениваются информацией с помощью сообщений. Если один процесс должен передать информацию другому, то он формирует сообщение и обращается к услугам операционной системы для передачи его по назначению.
Этот принцип взаимодействия лежит в основе одной из наиболее важ- ных концепций распределенных операционных систем - модели "клиент- сервер". В этой модели процесс либо запрашивает услуги - клиент, либо пре-
доставляет их - сервер. Очевидно, что один и тот же процесс может быть как клиентом, так и сервером. "Услуга" - это некоторая законченная (замкнутая) операция, в частности выполнение расчетов, прием внешних данных, опера- ция с устройством, например, вывод изображения на экран. В определенном смысле модель "клиент-сервер" можно рассматривать как расширенный ва- риант обращения к подпрограмме, при котором сервер играет роль подпро- граммы или системной процедуры.
Модель "клиент-сервер" основана на обмене сообщениями между про- граммами. Если клиент и сервер исполняются на разных ЭВМ, а сообщения передаются через сеть, то система является распределенной.
Чем больше вычислительные ресурсы процедур клиента и сервера и чем больше сложных функций они могут выполнять независимо, тем меньше число сообщений и, соответственно, нагрузка на сеть. Фактически важным преимуществом распределенных систем является то, что ресурсоемкие вы- числения можно выполнять локально и в результате уменьшить объем тра- фика, поскольку передается только информация, относящаяся к более высо- кому абстрактному уровню, чем локальные вычисления, то ecть некоторый итог локальных операций. Иными словами, в хорошо спроектированной сис- теме сообщения содержат информацию о цели ("установить опорное значе- ние х = 78.2"), а не о том, какие шаги следует для этого предпринять ("каково значение х в данный момент?", "х = 63", "увеличить на 16", "каково х сей- час?", "х = 79", уменьшить на 1", и т. д.). Промежуточные шаги выполняются локально при условии, что программное обеспечение спроектировано соответствующим образом.
2. Функции операционных систем в среде реального времени Операционная система (ОС, Operating System - OS) - это сложный про-
граммный продукт, предназначенный для управления аппаратными и про- граммными ресурсами вычислительной системы. Она предоставляет каждо- му процессу виртуальную (логическую) среду, включающую в себя время процессора и память. "Виртуальная среда" - это концептуальное понятие. Ее характеристики могут, как совпадать, так и не совпадать с параметрами ре- ального оборудования.
Многозадачность сейчас доступна почти на всех типах ЭВМ, и ее под- держка является одной из основных характеристик таких операционных сис- тем, как UNIX и Windows NT и выше. В первую очередь многозадачность должна обеспечивать распределение и защиту ресурсов. Первоначальной це- лью создания многозадачных систем, или систем разделения времени (time- sharing systems), было желание обеспечить одновременный доступ несколь- ких пользователей к дорогим вычислительным ресурсам и, соответственно, разделить между ними эксплуатационные расходы, то есть повысить эконо- мическую эффективность оборудования. В системах реального времени це- лью многозадачного режима является изоляция друг от друга разных опера- ций и распределение рабочей нагрузки между отдельными программными модулями. Единственным "пользователем" в этом случае является управляе- мая система.
В системах разделения времени, или многопользовательских системах, большое внимание уделяется защите и изоляции пользователей друг от друга с помощью паролей, управления доступом, учета использования ресурсов и т. д. Системы реального времени в этом смысле имеют меньше ограничений, поскольку разработчик всегда знает, что делает каждый модуль. В ситуациях, когда ценится каждая миллисекунда машинного времени, его нельзя тратить на дополнительные расходы по контролю доступа, поэтому файловые системы и механизмы защиты не являются важными компонентами операционных систем реального времени. Многопользовательские системы должны быть, в определенном смысле, "справедливыми", поскольку даже в режиме большой нагрузки нельзя допускать дискриминации ни одного пользователя. Наоборот, в приоритетных системах реального времени процессы четко разграничены с точки зрения права доступа к ресурсам процессора.
В распределенной среде операционная система дополнительно выпол- няет функции сопряжения программ с сетью и управления обменом данными и сообщениями между ЭВМ. В сетевых операционных системах каждая ЭВМ имеет высокую степень автономности. Общесистемные требования к обмену информацией позволяют взаимодействовать процессам, даже если они рабо- тают под управлением разных операционных систем, при условии, что каж- дая из них обладает необходимыми сетевыми возможностями.
3. Управление процессором и состояния процесса
Основными объектами в многозадачной среде являются процессы или задачи, описываемые своим контекстом. На одном процессоре в любой мо- мент времени может исполняться только одна задача. Контекст исполняемой задачи всегда можно "заморозить", сохранив содержимое регистров процес- сора. При остановке текущей задачи процессор продолжает исполнение дру- гих задач. Таким образом, процессор есть ограниченный ресурс, который распределяется между всеми задачами.
На одном процессоре для организации многозадачного режима выпол- нение каждой задачи разбивается на несколько коротких интервалов (рис.1). Процессор выполняет часть первой задачи, затем второй, третьей и т. д. Вре- менной интервал, выделенный для каждой задачи, составляет, например, 10 миллисекунд.
Внешний эффект разделения процессорного времени между задачами состоит в параллельном выполнении n задач. Когда n задач выполняются в системе параллельно каждая из них в среднем монопольно "располагает" процессором с производительностью 1/n, т. е. работает (развивается) на вир- туальном процессоре, производительность которого в n раз меньше, чем у реального физического процессора. Если вместо одного используется не- сколько процессоров, то это просто другая реализация того же самого логи- ческого принципа. В первом случае процессы разделены во времени, во вто- ром – в пространстве. Если исключить накладные расходы на планирование и межзадачное взаимодействие, то при выполнении n процессов на k одинако- вых процессорах каждому процессу в среднем выделяется виртуальный про-
Рисунок 1. - Принцип организации многозадачного режима: а - внешний эффект; б - распределение времени процессора
Простейшая многозадачная однопроцессорная система состоит из процедуры, сохраняющей контекст текущего процесса в стеке или в определенной области памяти и восстанавливающей контекст другого процесса, исполнение которого возобновляется с того места, где он был прерван. Системная программа, выбирающая один из готовых для исполнения процессов, называется планировщиком (scheduler). Стратегии выбора достаточно разнообразны и меняются от одной операционной системы к другой, однако чаще всего используется какой-либо механизм на основе приоритетов. Планировщик работает как один из процессов, который автоматически получает управление после каждого прерывания текущего процесса.
Операции по переключению процессов критичны по времени и должны осуществляться с максимальной эффективностью. На процессорах, первоначально не разработанных для многозадачного режима, процедура сохранения и восстановления контекста - переключение процессов - реализуется длинной последовательностью стандартных инструкций процессора. В набор команд процессора, спроектированного для работы в многозадачном режиме, входят специальные инструкции для сохранения и восстановления контекста. Переменные процесса не входят в состав контекста, и сохранять их специально нет необходимости, поскольку они хранятся в памяти, выделенной процессу и защищенной операционной системой от доступа других процессов.
Планировщик вызывается обычно после обработки каждого прерыва- ния. Если используется стратегия переключения процессов на основе кванто- вания времени (рис. 1), необходимо иметь внешний по отношению к процес- сору интервальный таймер, вырабатывающий прерывания по истечении кванта времени (time slice), выделенного процессу. При возникновении пре- рывания исполнение текущего процесса приостанавливается и проверяется, должен ли быть прерван текущий процесс и загружен новый. Принудитель- ная приостановка текущего процесса для передачи управления другому про- цессу называется вытеснением (preemption).
Продолжительность кванта времени влияет на производительность системы. При коротком кванте улучшается общее время обслуживания ко- ротких процессов. Если величина кванта сопоставима с временем, необходимым для переключения процессов, то большая часть ресурсов процессора будет уходить на планирование и переключение. Если величина кванта слишком большая, увеличивается время ожидания процессов и, соответственно, время реакции.
Процесс исполняется до тех пор, пока не произойдет одно из следую- щих событий:
- истек выделенный ему квант времени;
- процесс заблокирован, например, ждет завершения операции вво- да/вывода;
- процесс завершился;
- вытеснен другим процессом, имеющим более высокий приоритет, например обработчиком прерываний.
В многозадачной среде процесс может находиться в одном из трех со- стояний (рис. 2).
• Готов (ready). Процесс может начать исполнение, как только освобо- дится процессор.
• Исполнение (running, executing). Процесс исполняется в данный мо- мент, т. е. процессор исполняет его код.
• Ожидание, заблокирован (waiting, locked). Для продолжения работы процессу не хватает какого-либо ресурса, за исключением ЦП, либо он ждет наступления внешнего события.
Рисунок 2. - Состояния процесса
На рис. 2 также показаны возможные переходы из одного состояния в другое:
1. От "Загрузочный модуль на диске" к "Готов". Программа загружается (load) в оперативную память, настраиваются относительные адреса (relocation), выдѐляются рабочие области для данных, кучи и стека с соответствующими указателями и создается контекст процесса.
2. От "Готов" к "Исполнение". Планировщик выбирает первый в очереди готовых процессов и передает ему управление.
3. От "Исполнение" к "Готов". Процесс либо исчерпал свой квант вре- мени, либо появился готовый для исполнения процесс с более высоким при- оритетом.
4. От "Исполнение" к "Ожидание". Для дальнейшего развития процесс должен ждать наступления какого-либо внешнего события (завершения опе- рации ввода/вывода или освобождения ресурса, например доступа к памяти, заблокированной другим процессом, или сигнала от другого процесса и т. п.). Иногда процесс переводится в состояние ожидания до истечения некоторого интервала времени с помощью явной инструкции в его программе.
5. От "Ожидание" к "Готов". Когда ожидаемое событие произошло или истекло заданное время, процесс переводится в состояние "Готов" и помещается в очередь готовых процессов, откуда затем выбирается планировщиком.
6. После выполнения последней инструкции программы операционная система удаляет процесс из памяти и освобождает все выделенные ему ре- сурсы, включая память.
4. Стратегии выбора процесса
Существует несколько возможных стратегий выбора готовых процес- сов из очереди. Для определения той или иной стратегии необходимо прини- мать во внимание несколько противоречащих друг другу факторов - общее время, необходимое для решения задачи, ограничение на время реакции, важность и т. п. Рассмотрим две стратегии аналогичные тем, которые приме- няются при арбитраже шины.
Наиболее простой стратегией выбора является циклический (round- robin) метод - процессы выбираются последовательно один за другим в фик- сированном порядке и через равные интервалы времени. Основное достоин- ство метода - простота, однако, поскольку процессам с различными требова- ниями выделяются равные ресурсы процессора, некоторые из них обслужи- ваются неадекватно своим потребностям.
Более сложный принцип выбора основан на приоритетах (priorities). При каждом переключении планировщик передает управление готовому процессу с наивысшим приоритетом. Приоритет присваивается процессу в момент его создания и остается постоянным в течение всего времени - стати- ческий приоритет (static priority). Такой приоритет, как правило, определяет- ся на основе информации, предоставленной пользователем.
Планирование на основе статических приоритетов может привести к неприятным ситуациям. Процесс с наивысшим приоритетом, если он не на- ходится в состояния ожидания, будет всегда выбираться для исполнения и практически полностью занимать процессор. Нетривиальным является также выбор между процессами с одинаковым приоритетом. Для исключения по- добной ситуации применяется какой-либо алгоритм динамического назначе- ния приоритетов (dynamic priority allocation). Haпример, планировщик сни- жает приоритет исполняемого процесса на фиксированную величину. В ре- зультате его приоритет будет ниже, чем у другого готового процесса, кото- рый затем и выбирается для исполнения. Таким образом, обеспечивается вы-
полнение всех процессов. Через некоторое время ожидающим процессам возвращаются номинальные значения их приоритетов. Этот метод обеспечи- вает исполнение процессов даже с низким приоритетом и гарантирует, что процесс с высоким начальным приоритетом не будет непрерывно занимать процессор.
Разница в первоначально назначенных приоритетах приводит к тому, что процессы с более высокими приоритетами будут получать управление чаще, чем другие. Процессы, обращение к которым происходит более интен- сивно и/или время реакции которых ограничено, получают в начальный мо- мент более высокие приоритеты; менее важным процессам, для которых до- пустима отложенная реакция, присваиваются более низкие приоритеты.
Планирование процессов, основанное на приоритетах, работает хоро- шо, только если разные процессы имеют неодинаковые приоритеты. При- своение наивысших приоритетов всем процессам не повышает скорость ис- полнения, так как это не увеличивает быстродействие процессора, - каждый процесс будет ждать в очереди до тех пор, пока все остальные не будут вы- полнены. Система, в которой всем процессам присвоены одинаковые при- оритеты, работает по циклическому принципу. Наилучшие результаты дости- гаются в системе реального времени, если относительные приоритеты тща- тельно выбраны и сбалансированы.
1. Отображение адресного пространства программы на основную па-
мять.
мять.
2. Функции операционной системы по управлению памятью.
1. Отображение адресного пространства программы на основную па- Наиболее важным ресурсом после процессора является оперативная
память. В отличие от памяти жесткого диска, которую называют внешней
памятью, оперативной памяти для сохранения информации требуется постоянное электропитание. Память является важнейшим ресурсом, требующим тщательного управления со стороны мультипрограммной операционной системы. Особая роль памяти объясняется тем, что процессор может выполнять инструкции программы только в том случае, если они находятся в памяти. Память распределяется как между модулями прикладных программ, так и между модулями самой операционной системы.
В ранних ОС управление памятью сводилось к загрузке программы и ее данных из некоторого внешнего накопителя (перфоленты, магнитной ленты или магнитного диска) в память. С появлением мультипрограммирования перед ОС были поставлены новые задачи, связанные с распределением имеющейся памяти между несколькими одновременно выполняющимися программами. Функциями ОС по управлению памятью в мультипрограммной системе являются:
отслеживание свободной и занятой памяти;
выделение памяти процессам и освобождение памяти по завершении процессов;
вытеснение кодов и данных процессов из оперативной памяти на диск (полное или частичное), когда размеры основной памяти не достаточны для размещения в ней всех процессов, и возвращение их в оперативную память, когда в ней освобождается место;
настройка адресов программы на конкретную область физической па-
мяти.
Алгоритмы распределения, использования, освобождения ресурсов и
представления к ним доступа предназначены для наиболее эффективной организации работы всего комплекса устройств ЭВМ. Рассмотрим их на примере управления основной памятью.
Для выполнения программы при ее загрузке в основную память ей выделяется часть машинных ресурсов - они необходимы для размещения команд, данных, управляющих таблиц и областей ввода-вывода, то есть, производится трансляция адресного пространства откомпилированной программы в местоположение в реальной памяти.
Выделение ресурсов может быть осуществлено самим программистом (если он работает на языке, близком машинному), но может производиться и операционной системой.
Если выделение ресурсов производится перед выполнением про- граммы, такой процесс называется статическим перемещением, в ре- зультате которого программа «привязывается» к определенному месту в памяти вычислительной машины. Если же ресурсы выделяются в процессе выполнении программы, это называется динамическим перемещением, и в этом случае программа не привязана к определенному месту в реальной памяти. Динамический режим можно реализовать только с помощью опе- рационной системы.
При статическом перемещении могут встретиться два случая:
1. Реальная память больше требуемого адресного пространства про- граммы. В этом случае загрузка программы в реальную память производится, начиная с 0-го адреса.
Загружаемая программа А является абсолютной программой, так как никакого изменения адресов в адресном пространстве, подготовлен-
ном компилятором, при загрузке в основную память не происходит - программа располагается с 0-го адреса реальной памяти;
2. Реальная память меньше требуемого адресного пространства про- граммы. В этом случае программист (или операционная система) вынужден решать проблему, как организовать выполнение программы. Методов решения проблемы существует несколько: можно создать оверлейную структуру (то есть разбить программу на части, вызываемые в ОП по мере необходимости), сделать модули программы реентерабельными (то есть допускающими одновременную работу модуля по нескольким обращениям из разных частей программы или из различных программ).
В некоторых операционных системах адреса откомпилированной (с 0- го адреса) программы могут быть преобразованы в адреса реальной памяти, отличные от 0. При этом создается абсолютный модуль, который требует раз- мещения его в памяти всегда с одного и того же адреса.
При мультипрограммном режиме, если имеем программы А, В и С, для которых известно, что программа А выполняется при размещении в памяти с адреса 60 Кбайт до 90 Кбайт, В - с 60 Кбайт до 90 Кбайт, С - с 50 Кбайт до 120 Кбайт, организовать их совместное выполнение невозможно, так как им необходим один и тот же участок реальной памяти. Эти программы будут ждать друг друга либо их нужно заново редактировать с другого адреса.
В системах с динамическим перемещением программ перемещающий загрузчик размещает программу в свободной части памяти и допускает использование ее несмежных участков. В этом случае имеется больше возможностей для организации мультипрограммной работы, а, следовательно, и для более эффективного использования временных ресурсов ЭВМ.
2. Функции операционной системы по управлению памятью Помимо первоначального выделения памяти процессам при их создании ОС должна также заниматься динамическим распределением памяти, то есть выполнять запросы приложений на выделение им дополнительной памяти во время выполнения. После того как приложение перестает нуждаться в дополнительной памяти, оно может возвратить ее системе. Выделение па- мяти случайной длины в случайные моменты времени из общего пула памяти приводит к фрагментации и, вследствие этого, к неэффективному ее ис- пользованию. Оно характерно для систем со статическим перемещением. Дефрагментация памяти тоже является функцией операционной системы.
Во время работы операционной системы ей часто приходится создавать новые служебные информационные структуры, такие как описатели процессов и потоков, различные таблицы распределения ресурсов, буферы, используемые процессами для обмена данными, синхронизирующие объекты. Все эти системные объекты требуют памяти. В некоторых ОС заранее (во время установки) резервируется некоторый фиксированный объем памяти для системных нужд. В других же ОС используется более гибкий подход, при котором память для системных целей выделяется динамически. В таком случае разные подсистемы ОС при создании своих таблиц, объектов, структур обращаются к подсистеме управления памятью с запросами.
Защита памяти - это еще одна важная задача операционной системы, которая состоит в том, чтобы не позволить выполняемому процессу записы- вать или читать данные из памяти, назначенной другому процессу. Эта функ- ция, как правило, реализуется программными модулями ОС в тесном взаимо- действии с аппаратными средствами.
Для идентификации переменных и команд на разных этапах жизненного цикла программы используются символьные имена (метки), виртуальные адреса и физические адреса.
Символьные имена присваивает пользователь при написании программы на алгоритмическом языке или ассемблере.
Виртуальные адреса, называемые иногда математическими, или логическими адресами, вырабатывает транслятор, переводящий программу на машинный язык. Поскольку во время трансляции в общем случае не известно, в какое место оперативной памяти будет загружена программа, то транслятор присваивает переменным и командам виртуальные (условные) адреса, обычно считая по умолчанию, что начальным адресом программы будет нулевой адрес.
Физические адреса соответствуют номерам ячеек оперативной памяти, где в действительности расположены или будут расположены переменные и команды.
Совокупность виртуальных адресов процесса называется виртуальным адресным пространством. Диапазон возможных адресов виртуального пространства у всех процессов является одним и тем же.
Совпадение виртуальных адресов переменных и команд различных процессов не приводит к конфликтам, так как в том случае, когда эти переменные одновременно присутствуют в памяти, операционная система отображает их на разные физические адреса. В том случае, когда необходимо, чтобы несколько процессов разделяли общие данные или коды, операционная система отображает соответствующие участки виртуального адресного пространства этих процессов на один и тот же участок физической памяти.
Рисунок 1. – Интерпретация виртуального адреса
В других ОС виртуальное адресное пространство делится на части, называемые сегментами (или секциями, или областями). Б этом случае
помимо линейного адреса может быть использован виртуальный адрес (рис.1), представляющий собой пару чисел (п, т), где п определяет сегмент, а m - смещение внутри сегмента.
Существуют и более сложные способы структуризации виртуального адресного пространства, когда виртуальный адрес образуется тремя или даже более числами.
Задачей операционной системы является отображение индивидуальных виртуальных адресных пространств, всех одновременно выполняющихся процессов, на общую физическую память. При этом ОС отображает либо все виртуальное адресное пространство, либо только определенную его часть. Процедура преобразования виртуальных адресов в физические должна быть максимально прозрачна для пользователя и программиста.
Существуют два принципиально отличающихся подхода к преобразованию виртуальных адресов в физические. В первом случае замена виртуальных адресов на физические выполняется один раз для каждого процесса во время начальной загрузки программы в память. Специальная системная программа -перемещающий загрузчик-на основании имеющихся у нее исходных данных о начальном адресе физической памяти, в которую предстоит загружать программу, а также информации, предоставленной транслятором об адресно-зависимых элементах программы, выполняет загрузку программы, совмещая ее с заменой виртуальных адресов физическими.
Второй способ заключается в том, что программа загружается в память в неизмененном виде в виртуальных адресах, то есть операнды инструкций, и адреса переходов имеют те значения, которые выработал транслятор. В наиболее простом случае, когда виртуальная и физическая память процесса представляют собой единые непрерывные области адресов, операционная система выполняет преобразование виртуальных адресов в физические по следующей схеме. При загрузке операционная система фиксирует смещение действительного расположения программного кода относительно виртуального адресного пространства. Во время выполнения программы при каждом обращении к оперативной памяти выполняется преобразование виртуального адреса в физический.
Последний способ является более гибким: в то время как перемещаю- щий загрузчик жестко привязывает программу к первоначально выделенному ей участку памяти, динамическое преобразование виртуальных адресов позволяет перемещать программный код процесса в течение всего периода его выполнения. Но использование перемещающего загрузчика более эко- номично, так как в этом случае преобразование каждого виртуального адреса происходит только один раз во время загрузки, а при динамическом преобра- зовании - при каждом обращении по данному адресу.
В СРВ, когда заранее точно известно, в какой области оперативной памяти будет выполняться программа, транслятор выдает исполняемый код сразу в физических адресах.
Необходимо различать максимально возможное виртуальное адресное пространство процесса и назначенное (выделенное) процессу виртуальное адресное пространство. В первом случае речь идет о максимальном размере виртуального адресного пространства, определяемом архитектурой компью- тера, на котором работает ОС, и, в частности, разрядностью его схем адреса- ции (32-битная, 64-битная и т. п.). Например, при работе на компьютерах с 32-разряднымии процессорами Intel Реntium операционная система может предоставить каждому процессу виртуальное адресное пространство до 4 Гбайт (232). Однако это значение представляет собой только потенциально возможный размер виртуального адресного пространства, который редко на практике необходим процессу. Процесс использует только часть доступного ему виртуального адресного пространства.
Назначенное виртуальное адресное пространство представляет собой набор виртуальных адресов, действительно нужных процессу для работы. Эти адреса первоначально назначает программе транслятор на основании текста программы, когда создает кодовый (текстовый) сегмент, а также сегмент или сегменты данных, с которыми программа работает. Затем при создании процесса ОС фиксирует назначенное виртуальное адресное пространство в своих системных таблицах. В ходе своего выполнения процесс может увеличить размер первоначального назначенного ему виртуального адресного пространства, запросив у ОС создания дополнительных сегментов или увеличения размера существующих. В любом случае операционная система следит за корректностью использования процессом виртуальных адресов - процессу не разрешается оперировать с виртуальным адресом, выходящим за пределы назначенных ему сегментов.
Максимальный размер виртуального адресного пространства ограничивается только разрядностью адреса, присущей данной архитектуре компьютера, и, как правило, не совпадает с объемом физической памяти, имеющимся в компьютере.
Необходимо подчеркнуть, что виртуальное адресное пространство и виртуальная память - это различные механизмы, и они не обязательно реа- лизуются в операционной системе одновременно. Можно представить себе ОС, в которой поддерживаются виртуальные адресные пространства для про- цессов, но отсутствует механизм виртуальной памяти. Это возможно только в том случае, если размер виртуального адресного пространства каждого процесса меньше объема физической памяти.
Содержимое назначенного процессу виртуального адресного пространства, то есть коды команд, исходные и промежуточные данные, а также результаты вычислений, представляет собой образ процесса.
Во время работы процесса постоянно выполняются переходы от при- кладных кодов к кодам ОС, которые либо явно вызываются из прикладных процессов как системные функции, либо вызываются как реакция па внеш- ние события или на исключительные ситуации, возникающие при некор- ректном поведении прикладных кодов. Для того чтобы упростить передачу управления от прикладного кода к коду ОС, а также для легкого доступа мо-
дулей ОС к прикладным данным (например, для вывода их на внешнее уст- ройство), в большинстве ОС ее сегменты разделяют виртуальное адресное пространство с прикладными сегментами активного процесса. То есть, сег- менты ОС и сегменты активного процесса, образуют единое виртуальное ад- ресное пространство.
Обычно виртуальное адресное пространство процесса делится на две непрерывные части; системную и пользовательскую. В некоторых ОС (на- пример, Windows NT, ОS/2) эти части имеют одинаковый размер - по 2 Гбайт, хотя в принципе деление может быть и другим, например 1 Гбайт - для ОС, и 2 Гбайт - для прикладных программ. Часть виртуального адресного пространства каждого процесса, отводимая под сегменты ОС, является идентичной для всех процессов. Поэтому при смене активного процесса заменяется только вторая часть виртуального адресного пространства, содержащая его индивидуальные сегменты, как правило, - коды и данные прикладной программы. Архитектура современных процессоров отражает эту особенность структуры виртуального адресного пространства. Например, в процессорах Intel Реntium существует два типа системных таблиц: одна - для описания сегментов, общих для всех процессов, а другая - для описания индивидуальных сегментов данного процесса. При смене процесса первая таблица остается неизменной, а вторая заменяется новой.
Описанное выше назначение двух частей виртуального адресного про- странства - для сегментов ОС и для сегментов прикладной программы - явля- ется типичным, но не абсолютным. Имеются и исключения из общего прави- ла. В некоторых ОС существуют системные процессы, порожденные для ре- шения внутренних задач ОС. В этих процессах отсутствуют сегменты прикладной программы части, обычно предназначенной для прикладных сегментов. И, наоборот, в общей, системной части виртуального адресного пространства размещаются сегменты прикладного кода, предназначенные для совместного использования несколькими прикладными процессами. Механизм страничной памяти в большинстве универсальных операционных сиcтем применяется ко всем сегментам пользовательской части виртуального адресного пространства процесса. Исключения составляют ОС реального времени, в которых некоторые сегменты жестко фиксируются в оперативной памяти и соответственно никогда не выгружаются на диск - это обеспечивает быструю реакцию определенных приложений на внешние события. Системная часть виртуальной памяти в ОС любого типа включает область, подвергаемую страничному вытеснению, и область, на которую страничное вытеснение не распространяется. В не вытесняемой области размещаются модули ОС, требующие быстрой реакции и/или постоянного присутствия в памяти, например диспетчер потоков или код, который управляет заменой страниц памяти. Остальные модули ОС подвергаются страничному вытеснению, как и пользовательские сегменты. Обычно аппаратура накладывает свои ограничения на порядок использования виртуального адресного пространства. Некоторые процессоры (например, МIРS) предусматривают для определенной области системной части адресного
пространства особые правила отображения на физическую память. При этом виртуальный адрес прямо отображается на физический адрес (последний либо полностью соответствует виртуальному адресу, либо равен его части). Такая особая область памяти не подвергается страничному вытеснению, и поскольку достаточно трудоемкая процедура преобразования адресов исключается, то доступ к располагаемым здесь кодам и данным осуществляется очень быстро.
Методы управления, используемые в системах реального времени, обычно проще, чем в многопользовательских системах с разделением време- ни. В крупных вычислительных системах с множеством пользователей большинство программ и данных хранятся во вторичной (внешней) памяти - на жестком диске - и загружаются в оперативную память только при необхо- димости. Это приемлемо для систем разделения времени и пакетной обра- ботки, в которых несущественно, начнется задание минутой раньше или позже. Однако в системах реального времени задержек исполнения быть не должно, поэтому все необходимые модули предварительно загружаются в оперативную память. Тем не менее, в системах реального времени может возникнуть необходимость в выгрузке содержимого части оперативной па- мяти на диск.
Работа виртуальной памяти основана на предположении, что объем памяти, требуемый для процессов, превосходит размер доступной оперативной памяти. Устройства массовой памяти, например жесткий диск, используемые для реализации этого механизма, должны обладать как достаточной емкостью, так и значительным быстродействием. Операционная система копирует с диска в оперативную память только те части процесса и области его данных, называемые страницами (pages), которые непосредственно используются в данный момент, оставляя остальную часть во внешней памяти. Для загрузки наиболее часто используемых страниц и для уменьшения числа обращений к диску применяются различные стратегии оптимизации. Механизм виртуальной памяти позволяет процессу иметь адресное пространство больше, чем размер выделенной ему реальной оперативной памяти. С другой стороны, применение виртуальной памяти существенно увеличивает накладные расходы и замедляет работу системы из-за многократных обращений к диску.
Применение виртуальной памяти в системах реального времени вызвано в основном экономическими причинами. Стоимость хранения единицы информации в оперативной памяти выше, чем во вторичной памяти. Еще одной важной причиной является надежность работы. В случае системного сбоя можно восстановить работу процесса. Если сбой или перерыв в электропитании происходит, когда вся система находится только в оперативной памяти, все процессы и их данные будут потеряны, и восстановить их будет невозможно.
В системах реального времени представляет интерес только быстрая и эффективная виртуальная память. Чтобы быстро реагировать на внешние cигналы, соответствующие служебные процедуры должны постоянно хра-
ниться в оперативной памяти. Другим важным соображением, относящимся к использованию вторичной памяти в задачах реального времени, является ее работоспособность в производственной среде - жесткие диски и дискеты нельзя использовать в условиях сильных вибраций, ударов или интенсивных магнитных полей.
Одно из существенных различий между многопользовательскими опе- рационными системами и системами реального времени касается управления файлами. В многопользовательских системах наиболее важными проблемами является структура каталогов и защита файлов. Управление и защита катало- гов с соответствующим контролем прав доступа при каждом обращении тре- буют таких накладных расходов, которые обычно неприемлемы для систем реального времени. Однако, как правило, в системах реального времени эти меры не нужны, поскольку дисковая память используется в основном для протоколов и отчетов, а все процессы принадлежат одному "пользователю". Поэтому применение сложных механизмов управления файлами в системах реального времени обычно не оправдано.
Наиболее сложные операционные системы для достижения оптималь- ных характеристик позволяют настраивать параметры управления процессо- ром и памятью. Необходимо должным образом подобрать приоритеты про- цессов, продолжительность квантов времени, размер страницы виртуальной памяти и другие параметры операционной системы.
1. Переходные процессы в логических схемах.
2. Гонки.
3. Гонки по входу.
1. Переходные процессы в логических схемах
Задержка логической схемы слагается из задержек срабатывания логических элементов и задержек распространения сигналов по цепям связи между ними. Трудоемкость учета задержек зависит от соотношения значений задержек самих логических элементов и задержек в цепях связи. Если эти значения близки, то задержки различных трактов схемы можно определить только после размещения элементов на поверхности платы или кристалла большой интегральной схемы (БИС), когда станут, известны фактические длины связей. Если при этом задержки некоторых цепей не соответствуют требуемым, то нужно или переставлять элементы, или вносить изменения в функциональную схему, снова трассировать связи и снова определять задержки в них. Процесс становится итерационным, длительным. Именно в таком положении оказываются разработчики аппаратуры на быстрых элементах ЭСЛ, устанавливаемых на платах в виде микросхем или изго- тавливаемых прямо на поверхности кристаллов БИС. Сложность учета задержек -одна из причин, препятствующих широкому распространению элементов ЭСЛ в схемах цифровой автоматики.
В цифровой автоматике в основном используются элементы с временем переключения не менее 20 нc, что примерно на порядок превышает
задержку распространения сигнала в любом проводе монтажной платы типового размера. Паразитная емкость монтажа при использовании типовых плат также не настолько велика, чтобы существенно изменить задержку элемента. В этих случаях задержку внутриплатного и близкого межплатного монтажа рационально не учитывать отдельно, а, оценив худший случай, включить ее в состав задержки логического элемента. Небольшая потеря потенциально достижимого быстродействия окупается упрощением разработки схем, поскольку задержки могут быть учтены без каких-либо итераций, сразу, и притом уже на этапе логического проектирования. Технические этапы проектирования - размещение элементов и трассировка связей - выполняются только один раз и не вызывают необходимости корректировать функциональные схемы. Будем предполагать, что задержки в цепях связи включены в состав задержек логических элементов.
Рисунок 1. – Плотность вероятности распределения задержки элемента в условиях налаженного производства 1 и в период освоения 2
На рис. 1 показан возможный вид кривой технологического разброса задержки элементов при испытаниях на предприятии-изготовителе. Выходной контроль отсекает хвост кривой в соответствии с техническими
условиями (ТУ) на элемент с учетом необходимого запаса на старение, допуски и т. п. Если правильно налажены производство и контроль, то потребитель всегда имеет дело с элементами, задержка которых не превышает паспортную.
Однако, разработчику весьма полезно знать кроме максимальной и минимально возможную задержку. Однако, для большинства серийно выпускаемых микросхем значение минимальной задержки в ТУ не указано и, следовательно, изготовителем не гарантируется. Опыт работы схемотехника с данными элементами здесь бесполезен, поскольку кривая технологического разброса у разных изготовителей различна и к тому же чувствительна к перестройкам производства, что и иллюстрируют две кривые на рис.1. Поэтому если разработчик аппаратуры использует микросхемы, в паспорте которых не оговорено минимальное значение задержки, то он вынужден полагать минимальное время задержки равным нулю. Никаких юридических оснований считать, что это значение больше нуля, у него нет.
Уровень выхода элемента в течение отрезка времени от минимально возможного до максимально возможного значения задержки, когда фактическое состояние выхода элемента разработчику не известно, называют состоянием неопределенности и обозначают символом х. Состояние х, поступая на входы других логических элементов, может в зависимости от типа элемента порождать на их выходе или определенные состояния 1 или 0, или также неопределенное, обозначаемое X. Поведение логических элементов задается при этом законами уже не двоичной, а одного из видов троичной логики. Соотношения, расширяющие основные функции на третью переменную х, достаточно очевидны:

где х, x1 x2 - неопределенные значения сигналов на входах элементов.
Эффективным средством анализа переходных процессов в схемах являются временные диаграммы. При их построении состояние неопределенности изображают одним из двух способов, которые показаны для элемента И (рис. 2а). Изображение на рис. 2б строже, но менее наглядно; изображение на рис. 2в нагляднее, но может быть спутано с состоянием высокого импеданса элемента, имеющего три состояния выхода.
Рисунок 2.- Способы изображения состояния неопределенности логического элемента
Линии со стрелками обозначают причинно-следственные отношения в цепочке переключений. Линия начинается на фронте, который непосредственно вызывает переключение рассматриваемого элемента и оканчивается стрелкой на фронте выходного сигнала этого элемента. Наличие таких указателей заметно облегчает понимание работы сложных схем.
На рис. 3а показан фрагмент схемы и варианты начертания временных диаграмм переходных процессов. Здесь и в дальнейшем для обозначения выходного сигнала элемента используется номер самого элемента. Диаграмма на рис.3б игнорирует переходные процессы в элементах и схеме. Такие диаграммы применяют, когда основной целью является иллюстрация логических и причинно-следственных отношений, а длительностью переходных процессов по сравнению с интервалами между поступлением сигналов можно пренебречь.
Рисунок 3. - Временные диаграммы переходных процессов:
а - фрагмент схемы; б, в, г - изображение переходных процессов; б - без учета задержек элементов, в - в предположении, что задержки максимальны; г - с использованием состояния неопределенности
Диаграмма рис. 3г учитывает состояния неопределенности элементов в соответствии с (1). Она достаточно строго моделирует поведение схемы при любых комбинациях задержек, допускаемых паспортами элементов. Полезно сравнить диаграммы на рис. 3 в и г, обращая внимание на их
расхождения, причиной которых является общность диаграммы г и частность диаграммы в.
Быстрое чтение и особенно построение временных диаграмм требуют некоторой тренировки. Полезно самостоятельно построить несколько вариантов диаграмм, изменяя моменты поступления входных сигналов и соотношения задержек элементов схемы на рис. 3а. Построение диаграммы нужно начинать с тех элементов, для которых известны все входные сигналы, в данном примере - с элемента 1. После определения выхода элемента 1 известными становятся все входы элемента 2 и т. д. Если построение диаграммы с учетом состояния неопределенности вызывает затруднение, можно рекомендовать сначала построить диаграмму с нулевыми задержками, показанной на рис. 3б, затем на том же чертеже наложить на нее диаграмму с максимальными задержками, после чего интервалы состояний неопределенности выделяются намного легче.
В организациях, специализирующихся на разработке логических схем, построение и анализ временных диаграмм выполняются на ЭВМ с помощью специальных моделирующих программ. Для выявления некоторых тонких случаев неопределенности используют не только троичные, но и пятеричные, и более сложные формы представления ситуаций во время переходных процессов. Введение состояния неопределенности позволяет выявить важный, хотя и не очевидный с первого взгляда эффект, который всегда нужно учитывать.
На рис. 4 показана цепочка из двух элементов, на вход которой поступает сигнал в виде единичного импульса длительностью Т. У выходного сигнала в его начале и конце будут зоны неопределенности длительностью по 2Т каждая. Если задержки включения и выключения равны и максимальны, то полученный сигнал Y2, будет сдвинут относительно выходного на 2Т. В результате может оказаться, что один и тот же сигнал, переданный по двум цепочкам на два блока устройства, запустит их не одновременно. Понятие одновременности расплывается и становится относительным.
Если задержки включения существенно отличаются от задержек выключения, получится укороченный на 2Т (Y3) или удлиненный на 2Т (Y4) сигнал. В случае Y4 укороченной окажется пауза между последовательными импульсами. Могут получиться и любые промежуточные формы рассмотренных частных случаев, причем предугадать характер эффекта заранее невозможно. Если цепочка содержит k элементов, то во всех рассмотренных случаях вместо двойки в качестве множителя при Т войдет k. У разработчика нет никаких официальных документов, позволяющих проигнорировать любой из возможных эффектов, и он вынужден проектировать схему так, чтобы ни один из них не привел к сбою в работе. Если на выходе цепочки требуется получить импульс с минимальной дли- тельностью, то длительность импульса на входе цепочки должна быть на k% больше. Аналогично нужно обеспечивать на выходе цепочки и минимальную
длительность паузы, и максимальную длительность импульса, если это требуется.

Рисунок 4. – Изменение задержки и длительности импульса при прохождении его по цепочке элементов
2. Гонки
В логических схемах встречаются участки, где сигнал разветвляется, получившиеся два сигнала распространяются по двум независимым цепочкам элементов, а затем оба сигнала снова встречаются на входах одного элемента. Подобная ситуация показана на рис. 5а, где в рассматриваемый момент времени в представленном фрагменте схемы два тракта оказались прозрачными для входного сигнала благодаря тому, что все конъюнкторы фрагмента в этот момент открыты сигналами единичного уровня. Пусть в тракте чет четное число инверторов, а в тракте нечет - нечетное. Анализ подобной схемы методами алгебры Буля без учета задержек даст на ее выходе 0 при любом значении входного сигнала (рис. 5б). Но реальные элементы имеют конечную задержку срабатывания, и если обозначить задержки в трактах чет и нечет через Тчет и Тнечет, то в зависимости от соотношения этих величин получится один из процессов, изображенных на рис. 5 в и г. В обоих случаях в выходном сигнале появится помеха, не предусмотренная булевыми выражениями. Легко проверить, что замена последнего элемента И на элемент ИЛИ не ликвидирует помеху, а лишь проинвертирует ее и изменит момент появления.

Рисунок 5. - Варианты временных диаграмм (б, в, г), иллюстрирующие гонки в логической схеме (а)
Существенно, что полученная помеха - это не пренебрежимо короткий всплеск напряжения малой амплитуды. При достаточно большой разности Тчет и Тнечет помеха будет иметь длительность, во много раз превышающую время переключения элемента, и амплитуду, равную номинальному сигналу. Это уже полноценный логический сигнал, на который могут реагировать последующие элементы. Если выход схемы подключен к запоминающему элементу (триггеру), то помеха может запомниться, и будет влиять на последующие процессы в устройстве. Если выход схемы подан в качестве обратной связи на вход, там появится непредвиденный сигнал, который может вызвать непредвиденное повторное срабатывание этой же схемы.
Описанное явление называют гонками или состязаниями (races). Два сигнала идут разными путями, и схема может реагировать на них по-разному (верно или неверно) в зависимости от того, какой сигнал выиграет гонку.
Основная проблема в том, что разработчик, как правило, не знает, в каком тракте задержка окажется меньше. Изготовитель элементов гарантирует лишь максимальное время задержки элемента данного типа и ничего не говорит ни о конкретной задержке конкретного элемента, ни о минимально возможном времени задержки. Поэтому разработчик логических схем не может воспользоваться тем фактом, что число элементов в цепочке чет, скажем, больше, чем в цепочке нечет. При массовом производстве схем из произвольно взятых элементов найдется достаточно большое число таких узлов, в которых в цепочку чет попадут более быстрые элементы, а в цепочку нечет - более медленные и, вопреки ожидаемому, будет выполняться
неравенство Тчет<Тнечет. Даже если в цепочке нечет один элемент, а в цепочке чет - два, то в последнюю вполне могут попасть элементы, имеющие время задержки втрое меньшее, чем элемент цепочки нечет.
Специальный подбор элементов по задержке в условиях современного автоматизированного массового производства недопустим, проверка реально получившегося соотношения задержек обычно неприемлема, так как сильно удорожает наладку аппаратуры. Кроме того, при изменении температуры и старении задержки различных элементов изменяются с разной скоростью, и по этому поводу изготовитель, как правило, никаких гарантий не дает. Единственное, что гарантирует изготовитель элементов и на что может опереться разработчик схем (фактически или хотя бы юридически), это то, что задержка не выйдет за пределы, указанные в ТУ на элемент, и если в борьбе с гонками разработчик хочет одержать победу, то он должен основывать свои расчеты лишь на этих данных.
Распространены три метода борьбы с гонками: введение тактирования, построение противогоночных схем и учет минимального времени задержки. Наиболее универсальным, эффективным и поэтому широко используемым методом борьбы с гонками является тактирование. Основная суть его заключается в следующем. По всему цифровому устройству разводится единая система тактирующих (синхронизирующих) сигналов. В широко распространенной двухтактной или двухфазной системе синхронизации используются две периодические последовательности синхросигналов - синхросигнал С1 и синхросигнал С2. Взаимное расположение этих сигналов во времени показано на рис. 6б.
Схема (рис. 6а) разделена штриховой линией на две части. Левая принимает и обрабатывает сигнал ВХОД: ее выходной сигнал Y1 является входным для схемы правой части, которая запоминает результат в триггере Тг.

Рис. 5.6. Исключение помех, порожденных гонками, за счет
тактирования
Если сигнал ВХОД каким-либо образом «привязан» к одной из синхросе-рий, например к С1, то этот сигнал будет изменяться только в момент поступления синхроимпульсов С1, а в промежутках между ними будет оставаться постоянным. Схема, показанная в левой части рис. 6а, имеет параллельные пути, в ней существуют гонки и возможно появление на выходе Y1 ложных сигналов. На рис. 6б эту ситуацию в общем виде отражают интервалы неопределенности трактов чет и нечет. На входной конъюнктор С правой части схемы подается сигнал син-хросерий С2. Обязательным условием является такой временной сдвиг С2 по отношению к С1, который превышает самый длинный интервал неопределенности, т. е. самую большую задержку из всех параллельных трактов схемы. Это значит, что сигнал С2 откроет конъюнктор С заведомо после окончания всех переходных процессов в схеме и пропустит логически правильное, не искаженное гонками установившееся значение функции Y1. Как правило, конъюнктор С вводят в состав триггера, что делает триггер синхронным. Такой триггер переключается только по команде синхросигнала и не воспринимает информацию при его отсутствии. Конъюнктор С применяют и без триггера - в тех случаях, когда запоминать выходной сигнал схемы не требуется, а нужно лишь очистить его от помех, порожденных гонками. Тогда сигнал, открывающий конъюнктор С, обычно называют не синхросигналом, а стробом, а сам процесс отсечки помех - стробированием.
Система синхронизации едина для всего цифрового устройства, и интервал между синхросигналами задается в начале разработки. Схемотехник, разрабатывая каждый фрагмент логической схемы, так подбирает число последовательно включаемых в нее элементов и их типы, чтобы все переходные процессы в этом фрагменте с гарантией закончились к моменту поступления очередного синхросигнала. Достоинство синхронизации как средства борьбы с гонками в том, что разработчику не требуется вникать в специфику протекания переходных процессов, в характер возникающих гоночных ситуаций, не нужно знать минимального значения задержки и т. д. Все, что должен знать разработчик - это максимально возможную задержку самого длинного тракта логической схемы, а это легко вычисляется по паспортным данным используемых элементов.
Противогоночные схемы - это схемы, построенные так, что в них если и возникают, то только неопасные гонки, то есть такие, при которых отсутствует риск появления на выходе сигналов, не предусмотренных логическим выражением. Примером неопасной гонки может служить гонка фронта по двум трактам, в каждом из которых содержится четное (или в каждом нечетное) число инверторов и которые объединяются на выходах элементом ИЛИ: кто бы ни выиграл гонку, результат все равно будет верный, изменится лишь задержка его получения. Для исключения опасных гонок можно вводить в схему дополнительные связи и элементы так, чтобы нежелательные параллельные пути запирались самим входным сигналом еще
до достижения им опасной развилки тракта. Есть целый ряд других приемов, используемых при построении противогоночных схем.
Полезным свойством противогоночных схем оказывается их способность обрабатывать данные по мере поступления, асинхронно, то есть без привязки к тактирующим сигналам и связанным с этим потерям времени. Однако процедура построения таких схем очень сложна, она требует скрупулезного изучения характера протекания переходных процессов, выявления всех возможных гоночных путей, отделения опасных состязании от неопасных. С ростом числа элементов схемы разработчик очень скоро оказывается в плену невыполнимого по объему перебора вариантов. Специалистами разработан ряд удачных, остроумных асинхронных противогоночных схем, в основном - сложных типов триггеров с числом элементов в пределах десятка. Они широко применяются, в том числе и в тактируемых устройствах, для быстрого выполнения операций внутри самого такта.
Учет минимального времени задержки. Если известно минимально возможное время задержки элемента, то во многих практически важных случаях можно постулировать отсутствие гонок. Пусть в схеме на рис. 5а глубина цепочки Чет настолько больше глубины цепочки Нечет, что задержка в длинной цепочке, даже если последняя состоит только из самых быстрых элементов, будет все равно больше задержки сигнала в короткой цепочке, даже если в нее попадут только самые медленные элементы. Схема со столь большой разницей в длине путей всегда будет вести себя так, как показано на рис. 5в. То есть, пока входной сигнал равен единице, помеха на выходе не появится. Помеху после выключения входного сигнала можно ликвидировать введением дополнительной блокирующей связи. Можно, например, взять в качестве выходного элемента трехвходовой элемент и на его третий вход подать сам входной сигнал. В этом случае выход будет заперт сразу после перехода входного сигнала в нуль. Несложно предложить и другие формы использования для борьбы с гонками сведений о минимально возможной задержке или о наибольшей возможной кратности максимального и минимального значений задержки.
По возможностям применения этого метода борьбы с гонками разработчики, использующие различную элементную базу, находятся в неодинаковых условиях, В лучшем положении обычно находятся разработчики схем, предназначенных для реализации на поверхности кристалла. Результирующая задержка элементов на кристалле определяется длиной и шириной проводников межэлементных связей и временем переключения транзисторов, которое в свою очередь зависит от геометрических размеров элементов его маски. На все эти размеры разра- ботчик схемы кристалла в может влиять, что позволяет ему в случаях, когда это важно, делать задержку одной группы элементов гарантированно больше задержки другой группы. Правда, по мере роста числа элементов, размещаемых на одном кристалле, разработчик логических схем все реже допускается к воздействию на геометрические размеры элементов маски.
Технология автоматизированного проектирования схем на перспективных матричных кристаллах разрешает схемотехнику лишь соединять между собой проводниками стандартной ширины уже размещенные на кристалле стандартные транзисторы или логические элементы. Однако и здесь положение разработчика все-таки лучше, чем того, который использует отдельные микросхемы, поскольку задержки однотипных элементов, расположенных на одном кристалле, существенно между собой коррелируют, чего нельзя сказать о микросхемах даже одной закупочной партии, одного изготовителя. Эта корреляция позволяет изготовителю кристаллов после проведения соответствующих исследований постулировать для схемотехника максимально возможную кратность задержек элементов, расположенных на одном кристалле данного типа. С точки зрения борьбы с гонками это во многих случаях не хуже, чем знание минимально возможной задержки. Поэтому внутри интегральных схем метод борьбы с гонками за счет назначения параллельными путями таких соотношений задержек, при которых опасные гонки невозможны, используется, особенно при построении небольших узлов - типа триггеров, счетчиков и т. п.
В худшем положении находится разработчик, использующий готовые микросхемы, поскольку юридического документа о минимальном значении задержки он чаще всего не имеет. Правда, и тут опытный инженер может утверждать, что при использовании любой современной серии элементов и при любом их сочетании пробег сигнала по цепочке из, скажем, 64 элементов длится «наверняка» дольше, чем пробег сигнала по параллельной ветви из одного элемента. На сегодня нет серий, задержка элементов внутри которых отличалась бы в 64 раза. И в 32 раза тоже нет. И в 16, пожалуй, не найдется. Относительно восьми можно задуматься, в защиту четырех большинство специалистов серьезно спорить уже не станут, а отклонение времени задержки вдвое встретится в большинстве серий. Таким образом, если отсутствие гонок обосновывается большой кратностью числа элементов параллельных путей, то нужно отдавать себе отчет в том, что есть зоны явно допустимых решений (например, кратность 64) и зоны явно недопустимых (кратность 2), а граница между ними не определена. Каждый разработчик определяет ее для себя индивидуально в зависимости от опыта, соотношения поощрения за экономичную схему и наказания за сбои в ней из-за гонок. Проблема из технической становится психологической, организационной. В инженерной практике пользуются этим приемом и строят схемы, в которых в принципе, юридически, гонки возможны, но по утверждению разработчика их «наверняка» не будет.
В последние годы растет интерес к еще одному методу борьбы с гонками -построению самосинхронизирующихся схем. Рабочие узлы в этом случае строятся непротивогоночными, но они дополняются специальными схемами, которые обнаруживают факт окончания переходных процессов и вырабатывают разрешающий сигнал для следующих схем, играющий в каком-то смысле роль «асинхронного синхросигнала». Это направление рассматривается как весьма перспективное для построения БИС и особенно
сверхБИС, где применение обычной синхронизации встречает ряд трудностей. Однако в схемах и микросхемах обычного размера и технологии это направление пока не находит применения ввиду как сложности построения такого рода схем, так и, приблизительно, удвоения их ап- паратурных затрат
Проблема гонок в цифровой схемотехнике является очень серьезной. Большинство трудно обнаруживаемых и удивительно разнообразно проявляющихся ошибок в функциональных схемах связано с гонками, возможности появления которых разработчик не заметил. Основная причина
- ограниченность поля внимания человека. При разработке сложной схемы все внимание поглощается конструированию главного пути распространения сигнала, непосредственно решающего поставленную задачу. При этом побочные, не нужные для дела пути выпадают из поля зрения, а в них и
«таится погибель».
Гонки во вновь разработанной схеме нужно искать специально. Если есть такая возможность, то наиболее надежным и простым методом является моделирование работы схемы с помощью специальных программ. При поиске гонок «вручную» сначала нужно выявить все подозрительные места и затем методически их исследовать. Обнаружению таких мест способствуют специально предпринимаемые просмотры схемы, нацеленные на выявление всех возможных параллельных путей распространения сигнала. Полезен анализ временных диаграмм, в которых зоны неопределенности указывают на возможность появления ложных сигналов.
В борьбе с гонками наряду с излагаемым подходом, ориентированным на гарантированную работу даже при наиболее неблагоприятном сочетании задержек, существуют менее строгие походы, в основе которых лежит утверждение, что худший случай встречается редко, поэтому для оценки задержки схемы можно брать некоторое вероятностное значение, меньшее, чем максимально возможное время задержки. Подобные подходы, против которых в принципе возражать нельзя, для цифровой техники оказываются плодотворными, только если есть возможность провести абсолютно полное тестирование готового устройства во всех возможных режимах и условиях окружающей среды.
Если же надежность работы устройства основывается лишь на ста- тистической правильности работы отдельных его цепей, то, когда цепей много, что типично для цифровой техники, даже небольшое уменьшение надежности срабатывания элементов приводит к резкому снижению надежности всего устройства. Можно подсчитать, что если в каждой цепочке допустить вероятность помехи из-за гонок всего в I %, то вероятность работоспособности устройства, содержащего 100 таких цепочек, будет около 37 %. В среднем из каждых трех устройств, два будут неработоспособны. Поэтому приемами, приносящими в жертву надежность срабатывания отдельных цепочек, в цифровой технике пользоваться не следует.
3. Гонки по входу Гонки по входу возникают, когда ветвящийся сигнал поступает на элементы, имеющие разброс по уровню срабатывания
(рис. 7а), а фронт этого сигнала излишне пологий (рис. 7б). Если длительность фронта входного сигнала заметно больше времени срабатывания элементов, то где-то в середине фронта будет существовать отрезок времени, когда с точки зрения одного элемента входной сигнал уже равен 1, а с точки зрения другого - еще равен 0. Элементы будут реагировать на один и тот же сигнал как на два различных, а такая ситуация при проекти- ровании схемы ее алгоритмом не предусматривается. В результате схема в течение этого времени может выработать ложные сигналы. Это явление и называют «гонки по входу». Гонки по входу не наблюдаются, если логическая схема собрана на элементах одной серии микросхем. Потенциально опасны схемы, собранные из элементов различных серий, имеющих одинаковый уровень сигналов, но существенно различные времена задержек и фронтов. Гонки по входу возникают в схемах некоторых БИС, если их межэлементные связи сильно заваливают фронты. Опасностью возникновения гонок по входу объясняются ограничения на максимальную длительность фронтов входных сигналов, приводимые в паспортах многих микросхем.

Рисунок 7. - Гонки по входу: иллюстрация условий их возникновения
Если нет возможности увеличить крутизну фронта, то единственным средством борьбы с гонками по входу остается тактирование, поскольку в тактированном устройстве выходной сигнал схемы не используется до тех пор, пока в этой схеме не окончатся абсолютно все переходные процессы независимо от их физической природы. Однако тактирование не спасает от гонок по самому тактирующему входу. Поэтому, если крутизна фронтов синхросигналов мала, то нужно применять такие синхронные триггеры, в которых гонки по входу не возникают.
ВРЕМЕНИ
Лекция 3.1. Архитектура систем реального времени
1. Основные параметры и механизмы операционных систем реального времени.
2. Базовые концепции построения операционных систем реального времени.
3. Монолитная архитектура.
4. Модульная архитектура на основе микроядра.
5. Объектная архитектура на основе объектов – микроядер.
1. Основные параметры и механизмы операционных систем реального времени
Одно из коренных внешних отличий систем реального времени от систем общего назначения - четкое разграничение систем разработки и систем исполнения. Система исполнения операционных системах реального времени - набор инструментов (ядро, драйверы, исполняемые модули), обеспечивающих функционирование приложения реального времени.
Большинство современных ведущих операционных систем реального времени поддерживают целый спектр аппаратных архитектур, на которых работают системы исполнения (Intel, Motorola, RISC,MIPS, PowerPC, и дру- гие). Это объясняется тем, что набор аппаратных средств является частью комплекса реального времени и аппаратура должна быть также адекватна решаемой задаче. Поэтому ведущие операционные системы реального вре- мени перекрывают целый ряд наиболее популярных архитектур, чтобы удов- летворить самым разным требованиям по части аппаратуры. Систему испол- нения операционных системах реального времени и компьютер, на котором она исполняется называют "целевой" (target) системой. Система разработки – это набор средств, обеспечивающих создание и отладку приложения реаль- ного времени.
Системы разработки работают, как правило, в популярных и распро- страненных ОС, таких, как UNIX. Кроме того, многие операционные систе- мы реального времени имеют и так называемые резидентные средства разра- ботки, исполняющиеся в среде самой операционной системы реального вре- мени - особенно это относится к операционным системам реального времени класса "ядра".
Функционально средства разработки операционных систем реального времени отличаются от привычных систем разработки, таких, например, как Developers Studio, TaskBuilder, так как часто они содержат средства удален- ной отладки, средства профилирования (измерение времен выполнения от- дельных участков кода), средства эмуляции целевого процессора, специаль- ные средства отладки взаимодействующих задач, а иногда и средства моде- лирования. Рассмотрим основные параметры операционных системах реаль- ного времени.
Время реакции системы. Практически все производители систем ре- ального времени приводят такой параметр, как время реакции системы на прерывание (interrupt latency). Если главным для системы реального времени является ее способность вовремя отреагировать на внешние события, то та- кой параметр, как время реакции системы является ключевым.
В настоящее время нет общепринятых методологий измерения этого параметра, поэтому он является полем битвы маркетинговых служб произво- дителей систем реального времени. Но уже появился проект сравнения опе- рационных систем реального времени, который включает в себя, в том числе, и разработку методологии тестирования. Рассмотрим времена, которые не- обходимо знать для того, чтобы предсказать время реакции системы. Собы- тия, происходящие на объекте, регистрируются датчиками, данные с
датчиков передаются в модули ввода-вывода (интерфейсы) системы. Модули ввода-вывода, получив информацию от датчиков и преобразовав ее, генерируют запрос на прерывание в управляющем компьютере, подавая ему тем самым сигнал о том, что на объекте произошло событие. Получив сигнал от модуля ввода-вывода, система должна запустить программу обработки этого события. Интервал времени - от события на объекте и до выполнения первой инструкции в программе обработки этого события и является временем реакции системы на события. Проектируя систему реального времени, разработчики должны уметь вычислять этот интервал и знать из чего он складывается.
Время выполнения цепочки действий - от события на объекте до гене- рации прерывания - не зависит от операционных систем реального времени и целиком определяется аппаратурой, а интервал времени - от возникновения запроса на прерывание и до выполнения первой инструкции обработчика определяется целиком свойствами операционной системы и архитектурой компьютера. Причем это время нужно уметь оценивать в худшей для систе- мы ситуации, то есть в предположении, что процессор загружен, что в это время могут происходить другие прерывания, что система может выполнять какие-то действия, блокирующие прерывания.
Основанием для оценки времен реакции системы могут служить ре- зультаты тестирования с подробным описанием архитектуры целевой систе- мы, в которой проводились измерения с точным указанием, какие промежут- ки времени измерялись. Некоторые производители операционных систем ре- ального времени результаты такого тестирования предоставляют.
Время переключения контекста. В операционные системы реального времени заложен параллелизм, возможность одновременной обработки нескольких событий. Поэтому все операционные системы реального времени являются многозадачными (многопроцессными, многонитиевыми). Чтобы уметь оценивать накладные расходы системы при обработке параллельных событий, необходимо знать время, которое система затрачивает на передачу управления от процесса к процессу (от задачи к задаче, от нити к нити), то есть время переключения контекста.
Размеры системы. Для систем реального времени важным парамет- ром является размер системы исполнения, а именно суммарный размер ми- нимально необходимого для работы приложения системного набора (ядро, системные модули, драйверы и т. д.). С течением времени значение этого па- раметра уменьшается, тем не менее, он остается важным, и производители систем реального времени стремятся к тому, чтобы размеры ядра и обслужи- вающих модулей системы были невелики. Примеры: размер ядра операци- онной системы реального времени OS-9 на микропроцессорах МС68xxx - 22 Kб, VxWorks - 16 Kб.
Возможность исполнения системы из ПЗУ (ROM). Это свойство операционных систем реального времени - одно из базовых. Оно позволяет создавать компактные встроенные СРВ повышенной надѐжности, с ограни- ченным энергопотреблением, без внешних накопителей.
Важным параметром при оценке операционных систем реального вре- мени является набор инструментов, механизмов реального времени, предос- тавляемых системой.
Механизмы систем реального времени. Процесс проектирования конкретной системы реального времени начинается с тщательного изучения объекта. Разработчики проекта исследуют объект, изучают возможные собы- тия на нем, определяют критические сроки реакции системы на каждое со- бытие и разрабатывают алгоритмы обработки этих событий. Затем следует процесс проектирования и разработки программных приложений.
У разработчиков СРВ введено понятие «идеальная операционная система реального времени», в которой приложения реального времени разрабатываются на языке событий объекта. Такая система имеет свое назва- ние, хотя и существует только в теории. Называется она: "система, управ- ляемая критическими сроками". Разработка приложений реального времени в этой системе сводится к описанию возможных событий на объекте. В каждом описателе события указывается два параметра:
временной интервал - критическое время обслуживания данного события;
адрес подпрограммы его обработки.
Всю дальнейшую заботу о том, чтобы подпрограмма обработки собы- тия стартовала до истечения критического интервала времени, берет на себя операционная система.
Но это теоретически возможный предел. В реальности разработчик должен перевести язык событий объекта в сценарий многозадачной работы приложений операционных систем реального времени, стараясь оптимально использовать предоставленные ему специальные механизмы и оценить вре- мена реакций системы на внешние события при этом сценарии.
Рассмотрим механизмы, используемые в операционных системах ре- ального времени, которые делают систему реального времени предсказуе- мой.
Система приоритетов и алгоритмы диспетчеризации. Базовыми инструментами разработки сценария работы системы являются система при- оритетов процессов (задач) и алгоритмы планирования (диспетчеризации) операционных систем реального времени.
В многозадачных ОС общего назначения используются, как правило, различные модификации алгоритма круговой диспетчеризации, основанные на понятии непрерывного кванта времени ("time slice"), предоставляемого процессу для работы. Планировщик по истечении каждого кванта времени просматривает очередь активных процессов и принимает решение, кому передать управление, основываясь на приоритетах процессов (численных значениях, им присвоенных). Приоритеты могут быть фиксированными или меняться со временем. Это зависит от алгоритмов планирования в данной ОС. Но рано или поздно, процессорное время получат все процессы в системе.
Алгоритмы круговой диспетчеризации неприменимы в чистом виде в операционных системах реального времени. Основной недостаток - непре- рывный квант времени ("time slice"), в течение которого процессором владеет только один процесс. Планировщики же операционных систем реального времени имеют возможность сменить процесс до истечения кванта времени, если в этом возникла необходимость. Один из возможных алгоритмов пла- нирования при этом – алгоритм "приоритетный с вытеснением". Мир операционных систем реального времени отличается богатством различных алгоритмов планирования: динамические, приоритетные, монотонные, адаптивные и пр., цель же всегда преследуется одна - предоставить инструмент, позволяющий в нужный момент времени исполнять именно тот процесс, который необходим.
Механизмы межзадачного взаимодействия. Другой набор механиз- мов реального времени относится к средствам синхронизации процессов и передачи данных между ними. Для операционных систем реального времени характерна развитость этих механизмов. К таким механизмам относятся: се- мафоры, мьютексы, события, сигналы, средства для работы с разделяемой памятью, каналы данных (pipes), очереди сообщений. Многие из подобных механизмов используются и в ОС общего назначения, но их реализация в операционных системах реального времени имеет свои особенности. В ОСРВ
- время исполнения системных вызовов почти не зависит от состояния системы, и в каждой ОСРВ есть, по крайней мере, один быстрый механизм передачи данных от процесса к процессу.
Средства для работы с таймерами. Такие инструменты, как средства работы с таймерами, необходимы для систем с жестким временным регламентом, поэтому развитость средств работы с таймерами - необходимый атрибут операционных систем реального времени. Эти средства позволяют:
измерять и задавать различные промежутки времени (от 1 мкс и
выше);
генерировать прерывания по истечении временных интервалов; создавать разовые и циклические будильники.
В лекции были рассмотрены только базовые, обязательные
механизмы, использующиеся в ОСРВ. Кроме того, почти в каждой операционной системе реального времени присутствует целый набор дополнительных, специфических только для нее механизмов, касающихся системы ввода-вывода, управления прерываниями, работы с памятью. Каждая система содержит также ряд средств, обеспечивающих ее надежность: встроенные механизмы контроля целостности кодов, инструменты для работы с таймерами.
2. Базовые концепции построения операционных систем реального времени
При описании операционной системы часто указываются особенности ее структурной организации и основные концепции, положенные в ее основу.
К базовым концепциям относятся:
Способы построения ядра системы - монолитное ядро или микро- ядерный подход. Большинство ОС использует монолитное ядро, которое компонуется как одна программа, работающая в привилегированном режиме и использующая быстрые переходы с одной процедуры на другую, не тре- бующие переключения из привилегированного режима в пользовательский, и наоборот. Альтернативой является построение ОС на базе микроядра, ра- ботающего также в привилегированном режиме и выполняющего только минимум функций по управлению аппаратурой, в то время как функции ОС более высокого уровня выполняют специализированные компоненты ОС - серверы, работающие в пользовательском режиме. При таком построении ОС работает более медленно, так как часто выполняются переходы между при- вилегированным режимом и пользовательским, но система получается более гибкой - ее функции можно наращивать, модифицировать или сужать, до- бавляя, модифицируя или исключая серверы пользовательского режима. Кроме того, серверы хорошо защищены друг от друга, как и любые пользо- вательские процессы.
Построение ОС на базе объектно-ориентированного подхода дает воз- можность использовать все его достоинства, хорошо зарекомендовавшие се- бя на уровне приложений, внутри операционной системы. Ее основными достоинствами являются: аккумуляция удачных решений в форме стандарт- ных объектов; возможность создания новых объектов на базе имеющихся, с помощью механизма наследования; хорошая защита данных за счет их ин- капсуляции во внутренние структуры объекта, что делает данные недоступ- ными для несанкционированного использования извне; структурированность системы, состоящей из набора хорошо определенных объектов.
Наличие нескольких прикладных сред дает возможность в рамках од- ной ОС одновременно выполнять приложения, разработанные для несколь- ких ОС. Многие современные операционные системы поддерживают одно- временно прикладные среды MS-DOS, Windows, UNIX (POSIX), OS/2 или хотя бы некоторого подмножества из этого популярного набора. Концепция множественных прикладных сред наиболее просто реализуется в ОС на базе микроядра, над которым работают различные серверы, часть которых реали- зуют прикладную среду той или иной операционной системы.
Распределенная организация операционной системы позволяет упро- стить работу пользователей и программистов в сетевых средах. В распределенной ОС реализованы механизмы, которые дают возможность пользователю представлять и воспринимать сеть в виде традиционного однопроцессорного компьютера. Характерными признаками распределенной организации ОС являются:
наличие единой справочной службы разделяемых ресурсов; единой службы времени;
использование механизма вызова удаленных процедур (RPC) для про- зрачного распределения программных процедур по машинам;
многонитевой обработки, позволяющей распараллеливать вычисления в рамках одной задачи и выполнять эту задачу сразу на нескольких компью- терах сети;
наличие других распределенных служб.
3. Монолитная архитектура
Организация монолитной системы представляет собой структуру, у которой ОС написана в виде набора процедур, каждая из которых может вызывать другие, когда ей это нужно. При использовании такой техники каждая процедура системы имеет строго определенный интерфейс в терминах параметров и результатов, и каждая имеет возможность вызвать любую другую для выполнения необходимой для нее работы.
Для построения монолитной системы необходимо скомпилировать все отдельные процедуры, а затем связать их в единый объектный файл с помо- щью компоновщика. Здесь, по существу, полностью отсутствует сокрытие деталей реализации - каждая процедура видит любую другую процедуру (в отличие от структуры, содержащей модули, в которой большая часть ин- формации является локальной для модуля и процедуры модуля можно вы- звать только через специально определенные точки входа).
Однако даже такие монолитные системы могут иметь некоторую структуру. При обращении к системным вызовам, поддерживаемым операци- онной системой, параметры помещаются в строго определенные места - ре- гистры или стек, после чего выполняется специальная команда прерывания, известная как вызов ядра или вызов супервизора. Эта команда переключает машину из режима пользователя в режим ядра и передает управление операционной системе. Затем операционная система проверяет параметры вызова, чтобы определить, какой системный вызов должен быть выполнен. После этого операционная система обращается к таблице как к массиву с номером системного вызова в качестве индекса. В k-м элементе таблицы содержится ссылка на процедуру обработки системного вызова. Такая организация операционной системы предполагает следующую структуру:
1. Главная программа, которая вызывает требуемую служебную процедуру.
2. Набор служебных процедур, выполняющих системные вызовы.
3. Набор утилит, обслуживающих служебные процедуры. В этой модели для каждого системного вызова имеется одна служебная процедура. Утилиты выполняют функции, которые нужны нескольким служебным процедурам. Деление процедур на три уровня показано на рис. 1.

Рисунок 1. – Модель монолитной системы
В силу преимуществ объектно-ориентированного подхода приложения создаются на его основе, используя один из языков программирования, наилучшим образом поддерживающий этот подход. Архитектуры же классических операционных систем реального времени основаны на архитектурах UNIX систем и используют традиционный процедурный подход к программированию. Сочетание объектно- ориентированных приложений и процедурных операционных систем имеет ряд недостатков:
1. Происходит разрыв парадигмы программирования: в едином рабо- тающем комплексе (приложение + ОСРВ) разные компоненты используют разные подходы к разработке программного обеспечения.
2. Не используются все возможности объектно-ориентированного подхода.
3. Возникают некоторые потери производительности из-за разного ти- па интерфейсов в ОСРВ и приложении.
Естественно, возникает идея строить саму СРВ, используя объектно- ориентированный подход. При этом:
- как приложение, так и операционная система полностью объектно- ориентированны и используют все преимущества этого подхода;
- приложение и ОСРВ могут быть полностью интегрированы, поскольку используют один объектно-ориентированный язык программирования;
- обеспечивается согласование интерфейсов ОСРВ и приложения;
- приложение может «моделировать» ОСРВ для своих потребностей, заказывая нужные ему объекты;
- единый комплекс (приложение + ОСРВ) является модульным и легко модернизируемым. Идея реализована в ОСРВ SoftKernel, целиком написанной на C++. ОСРВ с монолитной архитектурой можно представить в виде:
- прикладного уровня: состоящего из работающих прикладных процессов;
- системного уровня: состоящего из монолитного ядра операционной системы, в котором можно выделить следующие части:
а) интерфейс между приложениями и ядром (API);
б) собственно ядро системы;
в) интерфейс между ядром и оборудованием (драйверы устройств).
API в таких системах играет двойную роль:
1) управляет взаимодействием прикладных процессов и системы;
2) обеспечивает непрерывность выполнения кода системы (отсутствие переключения задач во время исполнения кода системы).
Основным преимуществом монолитной архитектуры является ее относительная быстрота работы по сравнению с другими архитектурами. Однако, достигается это, в основном, за счет написания значительных частей системы на ассемблере.
Недостатки монолитной архитектуры:
1. Системные вызовы, требующие переключения уровней привилегий (от пользовательской задачи к ядру), должны быть реализованы как преры- вания или ловушки (специальный тип исключений). Это значительно увеличивает время их работы.
2. Ядро не может быть прервано пользовательской задачей. Это может приводить к тому, что высокоприоритетная задача может не получить управ- ления из-за работы низкоприоритетной задачи. Например, низкоприоритет- ная задача запросила выделение памяти, сделала системный вызов, до окон- чания которого сигнал активизации высокоприоритетной задачи не сможет ее активизировать.
3. Сложность переноса на новые архитектуры процессора из-за значи- тельных ассемблерных вставок.
4. Негибкость и сложность развития: изменение части ядра системы требует его полной перекомпиляции.
4. Модульная архитектура на основе микроядра
Модульная архитектура появилась, как попытка убрать узкое место API и облегчить модернизацию системы и перенос ее на новые процессоры.
API в модульной архитектуре играет только одну роль: обеспечивает связь прикладных процессов и специального модуля менеджера процессов. Однако теперь микроядро играет двойную роль:
1) управление взаимодействием частей системы (например, менедже- ров процессов и файлов);
2) обеспечение непрерывности выполнения кода системы (отсутствие переключения задач во время исполнения микроядра).
Недостатки модульной архитектуры фактически те же, что и у моно- литной архитектуры. Проблемы перешли с уровня API на уровень микрояд- ра. Системный интерфейс по-прежнему не допускает переключения задач во время работы микроядра, только сократилось время пребывания в этом со- стоянии. API по-прежнему может быть реализован только на ассемблере, проблемы с переносимостью микроядра уменьшились (в связи с сокращени- ем его размера).
5. Объектная архитектура на основе объектов-микроядер
В этой архитектуре (используемой в ОСРВ SoftKernel) API отсутствует вообще. Взаимодействие между компонентами системы
(микроядрами) и пользовательскими процессами осуществляется посредством обычного вызова функций, поскольку и система, и приложения написаны на одном языке (C++). Это обеспечивает максимальную скорость системных вызовов.
Фактическое равноправие всех компонент системы обеспечивает воз- можность переключения задач в любое время, то есть система полностью управляема.
Объектно-ориентированный подход обеспечивает модульность, безо- пасность, легкость модернизации и повторного использования кода.
Роль API играет компилятор и динамический редактор объектных свя- зей (linker). При старте приложения динамический linker загружает нужные ему микроядра (в отличие от предыдущих систем, не все компоненты самой операционной системы должны быть загружены в оперативную память). Ес- ли микроядро уже загружено для другого приложения, то оно повторно не загружается, а используется код и данные уже имеющегося микроядра. Это позволяет сократить объем требуемой памяти.
Поскольку разные приложения разделяют одни микроядра, то они должны работать в одном адресном пространстве. Следовательно, система не может использовать виртуальную память и тем самым работает быстрее (так как исключаются задержки на трансляцию виртуального адреса в физиче- ский).
Поскольку все приложения и сами микроядра работают в одном адресном пространстве, то они загружаются в память, начиная с неизвестного на момент компиляции адреса. Следовательно, приложения и микроядра не должны зависеть от начального адреса (как по коду, так и по данным). Это свойство автоматически обеспечивает возможность записи приложений и модулей в ПЗУ, с последующим их исполнением, как в самом ПЗУ, так и в оперативной памяти.
Микроядра по своим характеристикам напоминают структуры, используемые в других операционных системах, однако есть и свои различия.
Микроядра и модули. Многие ОС поддерживают динамическую за- грузку компонент системы, называемых модулями. Однако модули не под- держивают объектно-ориентированный подход ввиду того, что микроядро является фактически представителем некоторого класса. Далее, обмен ин- формацией с модулями происходит посредством системных вызовов, что достаточно дорого.
Микроядра и драйверы. Многие ОС поддерживают возможность сво- его расширения посредством драйверов (специальных модулей, обычно слу- жащих для поддержки оборудования). Однако драйверы часто должны быть статически связаны с ядром (образовывать с ним связанный загрузочный об- раз еще до загрузки) и должны работать в привилегированном режиме. Как и модули, они не поддерживают объектно-ориентированный подход и доступ- ны приложениям только посредством системных вызовов.
Микроядра и DLL (Dynamically Linked Libraries, динамически связы- ваемые библиотеки). Многие системы оформляют библиотеки, из которых берутся функции при динамическом связывании, в виде специальных моду- лей, называемых DLL. DLL обеспечивает разделение своего кода и данных для всех работающих приложений, в то время, как для микроядер можно управлять доступом для каждого конкретного приложения. DLL не поддер- живает объектно-ориентированный подход, код DLL не является позиционно-независимым, и потому не может быть записан в ПЗУ.
1. Синхронизация процессов в системах реального времени.
2. Критические секции.
3. Семафоры.
4. События.
1. Синхронизация процессов в системах реального времени Организация некоторого порядка исполнения процессов называется синхронизацией (synchronization). Синхронизация процессов является ос- новной функцией многозадачных операционных систем и используется для защиты ресурсов - с помощью механизма синхронизации упорядочивается доступ к ресурсу. То есть, процесс может получить доступ к ресурсу только после того, как другой процесс освободил его. Введение дополнительных пе- ременных для защиты ресурсов не лучший выход, поскольку эти переменные сами становятся общим ресурсом. Существо проблемы состоит в том, что операции проверки и изменения значения переменной защиты разделены во времени и могут быть прерваны в любой момент. Более того, непрерывный контроль значений этих переменных представляет собой излишние затраты процессорного времени.
Существует достаточно обширный класс средств операционных сис- тем, с помощью которых обеспечивается взаимная синхронизация процессов и потоков. Потребность в синхронизации потоков возникает только в муль- типрограммной операционной системе и связана с использованием аппарат- ных и информационных ресурсов вычислительной системы. Синхронизация необходима для исключения гонок и тупиков при обмене данными между потоками, разделении данных, при доступе к процессору и устройствам ввода-вывода.
Ситуации, когда два или более потоков обрабатывают разделяемые данные и конечный результат зависит от соотношения скоростей потоков, называются гонками.
Во многих операционных системах эти средства называются средства- ми межпроцессного взаимодействия.
Выполнение потока в мультипрограммной среде всегда имеет асин- хронный характер. Очень сложно с полной определенностью сказать, на ка- ком этапе выполнения будет находиться процесс в определенный момент
времени. Даже в однопрограммном режиме не всегда можно точно оценить время выполнения задачи. Это время во многих случаях существенно зависит от значения исходных данных, которые влияют на количество циклов, направления разветвления программы, время выполнения операций ввода- вывода и т. п. Так как исходные данные в разные моменты запуска задачи могут быть разными, то и время выполнения отдельных этапов и задачи в целом является весьма неопределенной величиной.
Еще более неопределенным является время выполнения программы в мультипрограммной системе. Моменты прерывания потоков, время нахож- дения их в очередях к разделяемым ресурсам, порядок выбора потоков для выполнения - все эти события являются результатом стечения многих об- стоятельств и могут быть интерпретированы как случайные. В лучшем слу- чае можно оценить вероятностные характеристики вычислительного процес- са, например вероятность его завершения за данный период времени.
Таким образом, потоки в общем случае (когда программист не пред- принял специальных мер по их синхронизации) протекают независимо, асинхронно друг другу, Это справедливо как по отношению к потокам одно- го процесса, выполняющим общий программный код, так и по отношению к потокам разных процессов, каждый из которых выполняет собственную программу.
Любое взаимодействие процессов или потоков связано с их синхрони- зацией, которая заключается в согласовании их скоростей путем приоста- новки потока до наступления некоторого события и последующей его активизации при наступлении этого события. Синхронизация лежит в основе любого взаимодействия потоков, связано ли это взаимодействие с разделени- ем ресурсов или с обменом данными. Например, поток-получатель должен обращаться за данными только после того, как они помещены в буфер пото- ком-отправителем. Если же поток-получатель обратился к данным до мо- мента их поступления в буфер, то он должен быть приостановлен.
При совместном использовании аппаратных ресурсов синхронизация также совершенно необходима. Когда, например, активному потоку требует- ся доступ к последовательному порту, а с этим портом в монопольном режи- ме работает другой поток, находящийся в данный момент в состоянии ожи- дания, то операционная система (ОС) приостанавливает активный поток и не активизирует его до тех пор, пока нужный ему порт не освободится. Часто нужна также синхронизация с событиями, внешними по отношению к вычис- лительной системе, например реакции на нажатие комбинации клавиш Сtгl+С.
Ежесекундно в системе происходят сотни событий, связанных с распределением и освобождением ресурсов, и операционная система должна иметь надежные и производительные средства, которые бы позволяли ей синхронизировать потоки с происходящими в системе событиями.
Для синхронизации потоков прикладных программ программист может использовать как собственные средства и приемы синхронизации, так и средства операционной системы. Например, два потока одного
прикладного процесса могут координировать свою работу с помощью доступной для них обоих глобальной логической переменной, которая устанавливается в единицу при осуществлении некоторого события, например выработки одним потоком данных, нужных для продолжения работы другого. Однако во многих случаях более эффективными или даже единственно возможными являются средства синхронизации, предоставляемые операционной системой в форме системных вызовов. Так, потоки, принадлежащие разным процессам, не имеют возможности вмеши- ваться каким-либо образом в работу друг друга. Без посредничества операционной системы они не могут приостановить друг друга или оповестить о произошедшем событии. Средства синхронизации используются операционной системой не только для синхронизации прикладных процессов, но и для ее внутренних нужд.
Обычно разработчики операционных систем предоставляют в распоряжение прикладных и системных программистов широкий спектр средств синхронизации. Эти средства могут образовывать иерархию, когда на основе более простых средств строятся более сложные, быть функционально специализированными. Например, средства для синхронизации потоков одного процесса, средства для синхронизации потоков разных процессов при обмене данными и т. д. Часто функциональные возможности разных системных вызовов синхронизации перекрываются, так что для решения одной задачи программист может воспользоваться несколькими вызовами в зависимости от своих личных предпочтений.
Пренебрежение вопросами синхронизации в многопоточной системе может привести к неправильному решению задачи или даже к краху системы.
2. Критические секции
Важным понятием синхронизации потоков является понятие
«критической секции» программы. Критическая секция - это часть программы, результат выполнения которой может непредсказуемо меняться, если переменные, относящиеся к этой части программы, изменяются другими потоками в то время, когда выполнение этой части еще не завершено. Критическая секция всегда определяется по отношению к определенным критическим данным, при несогласованном изменении которых могут возникнуть нежелательные эффекты. Во всех потоках, работающих с критическими данными, должна быть определена критическая секция. В разных потоках критическая секция состоит в общем случае из разных последовательностей команд.
Чтобы исключить эффект гонок по отношению к критическим данным, необходимо обеспечить, чтобы в каждый момент времени в критической секции, связанной с этими данными, находился только один поток. При этом неважно, находится этот поток в активном или в приостановленном состоянии. Этот прием называют взаимным исключением. Операционная система использует разные способы реализации взаимного исключения. Некоторые способы пригодны для взаимного исключения при вхождении в критическую секцию только
потоков одного процесса, в то время как другие могут обеспечить взаимное исключение и для потоков разных процессов.
Самый простой и в то же время самый неэффективный способ обеспе- чения взаимного исключения состоит в том, что операционная система по- зволяет потоку запрещать любые прерывания на время его нахождения в критической секции. Однако этот способ практически не применяется, так как опасно доверять управление системой пользовательскому потоку - он может надолго занять процессор, а при крахе потока в критической секции крах потерпит вся система, потому что прерывания никогда не будут разре- шены.
Блокирующие переменные. Для синхронизации потоков одного про- цесса прикладной программист может использовать глобальные блокирую- щие переменные. С этими переменными, к которым все потоки процесса имеют прямой доступ, программист работает, не обращаясь к системным вы- зовам ОС.
Каждому набору критических данных ставится в соответствие двоич- ная переменная, которой поток присваивает значение 0, когда он входит в критическую секцию, и значение 1, когда он ее покидает.
Блокирующие переменные могут использоваться не только при доступе к разделяемым данным, но и при доступе к разделяемым ресурсам любого вида.
Если все потоки написаны с учетом вышеописанных соглашений, то взаимное исключение гарантируется. При этом потоки могут быть прерваны операционной системой в любой момент и в любом месте, в том числе в кри- тической секции.
Однако следует заметить, что одно ограничение на прерывания все же имеется. Нельзя прерывать поток между выполнением операций проверки и установки блокирующей переменной. Поясним это. Пусть в результате про- верки переменной поток определил, что ресурс свободен, но сразу после этого, не успев установить переменную в 0, был прерван. За время его приостановки другой поток занял ресурс, вошел в свою критическую секцию, но также был прерван, не завершив работы с разделяемым ресурсом. Когда управление было возвращено первому потоку, он, считая ресурс свободным, установил признак занятости и начал выполнять свою критическую секцию. Таким образом, был нарушен принцип взаимного исключения, что потенциально может привести к нежелательным последствиям. Во избежание таких ситуаций в системе команд многих компьютеров предусмотрена единая, неделимая команда анализа и присвоения значения логической переменной (например, команды ВТС, ВТК и ВТ5 процессора Реntium). При отсутствии такой команды в процессоре соответствующие действия должны реализовываться специальными системными примитивами (примитив - базовая функция ОС), которые бы запрещали прерывания на протяжении всей операции проверки и установки.
Реализация взаимного исключения описанным выше способом имеет существенный недостаток: в течение времени, когда один поток находится в
критической секции, другой поток, которому требуется тот же ресурс, получив доступ к процессору, будет непрерывно опрашивать блокирующую переменную, бесполезно тратя выделяемое ему процессорное время, которое могло бы быть использовано для выполнения какого-нибудь другого потока. Для устранения этого недостатка во многих ОС предусматриваются специальные системные вызовы для работы с критическими секциями.
3. Семафоры
Семафоры (semaphore) - это основной метод синхронизации. Он, в сущности, является наиболее общим методом синхронизации процессов.
В классическом определении семафор представляет собой целую переменную, значение которой больше нуля, то есть просто счетчик. Обычно семафор инициализируется в начале программы 0 или 1. Семафоры, которые могут принимать лишь значения 0 и 1, называются двоичными. Над семафо- рами определены две операции - signal и wait. Операция signal увеличивает значение семафора на 1, а вызвавший ее процесс продолжает свою работу. Операция wait приводит к различным результатам, в зависимости от текуще- го значения семафора. Если его значение больше 0, оно уменьшается на 1, и процесс, вызвавший операцию wait, может продолжаться. Если семафор имеет значение 0, то процесс, вызвавший операцию wait, приостанавливается (ставится в очередь к семафору) до тех пор, пока значение соответствующего семафора не увеличится другим процессом с помощью операции signal. Только после этого операция wait приостановленного процесса завершается (с уменьшением значения семафора), а приостановленный процесс продол- жается.
Важно, что проверка и уменьшение значения семафора в операции wait выполняются за один шаг. Операционная система не может прервать выполнение операции wait между проверкой и уменьшением значения. Операция wait для семафора имеет такое же функциональное значение, что и инструкция test_and_set.
Если несколько процессов ждут одного и того же семафора, то после выполнения операции signal только один из них может продолжить свое раз- витие. В зависимости от реализации процессы могут ждать в очереди, упоря- доченной либо по принципу FIFO (Firstln, FirstOut - первым вошел, первым вышел), либо в соответствии с приоритетами, или выбираться случайным об- разом.
Названия управляющей структуры "семафор" и операций signal и wait имеют очевидное мнемоническое значение. В литературе вместо signal и wait применяются и другие названия с тем же самым функциональным смыслом.
С помощью семафоров проблема защиты ресурсов решается следую- щим образом:
program sem_example (* защита ресурса *)
var P1: semaphore
P1 := 1;
while true do (* бесконечный цикл *)
begin (* процесс А *)
wait(P1);
(* защищенный ресурс *)
signal(P1);
…
end; (* процесс А *)
while true do (* бесконечный цикл *)
begin (* процесс В *)
wait(Pl);
(* защищенный ресурс *)
signal(Pl);
…
end; (* процесс В *)
end. (* sem_example *)
Семафор гарантирует, что два процесса могут получить доступ к за- щищенному ресурсу только по очереди. При этом не создается никаких до- полнительных связей - если один процесс исполняется быстрее другого, то за определенный промежуток времени он будет чаще получать доступ к ресур- су. Процесс вынужден ждать окончания другого только в том случае, когда последний находится в критической секции. Одновременно гарантируется и живучесть. Если исполнение процесса по каким-либо причинам прекращает- ся, то, при условии, что он находился вне критической секции, это не мешает развитию другого процесса.
Само по себе применение семафоров не гарантирует предотвращения тупиковых ситуаций. Если два процесса используют семафоры следующим образом
wait(Pl) wait(P2) wait(P2) wait(Pl)
… …
(* защищенный ресурс *) (* защищенный ресурс *)
… …
signal(Pl) signal(P2) signal(P2) signal(Pl)
то по-прежнему существует риск возникновения тупика. Если пере- ключение процессов происходит между двумя операторами wait первой про- граммы, а вторая программа выполнит свои операторы wait, то это приводит к тупику, поскольку каждая программа ожидает от другой освобождения се- мафора. Проблема состоит в том, что, хотя семафор гарантирует неразрыв- ность проверки и установки значения, он сам остается защищенным ресур- сом. В приведенном примере явно нарушен запрет последовательного выде- ления, и это приводит к возможности тупиковых ситуаций.
Семафор может помочь при синхронизации взаимосвязанных действий. Например, если процесс должен работать с данными только после
того, как они считаны с внешнего порта, программа может иметь следующий вид:
Process "Чтение данных" Process "Обработка данных"
(* чтение новых данных *) wait(data_available); signal(data_available); (*обработка данных *) end; end;
Это решение отделяет операцию ввода данных от их обработки. На появление новых данных указывает значение семафора, отличное от 0. Если существует механизм буферизации (промежуточного хранения) новых данных, то процедура обработки сможет получить все данные, даже если они поступают быстрее, чем она в состоянии их принять. В системах реального времени принято отделять процедуры, требующие быстрой реакции, напри- мер прием данных с внешнего порта, от других процессов.
Для защиты критических секций, в которые по определению в любой момент времени может входить только один процесс, используются двоич- ные семафоры, также называемые mutex (от mutual exclusion - взаимное ис- ключение). В этом случае нельзя использовать обычные семафоры, так как их значение может превышать 1 и, следовательно, несколько программ могут получить доступ к ресурсу, уменьшая значения семафора. Операция signal над двоичным семафором всегда устанавливает его значение в 1. Операция wait уменьшает это значение с 1 до 0 и разрешает процессу продолжаться дальше. Если семафор имеет значение 0, то процесс, выполняющий wait, должен ждать до тех пор, пока значение семафора не изменится.
Ошибки синхронизации, связанные с неправильным использованием семафоров, трудно выявляются. Процесс, не выполняющий операцию wait, может войти в критическую секцию одновременно с другим процессом, что приведет к непредсказуемым результатам. Естественно, нельзя говорить, что такая ошибка выявится при тестировании; она даже может никогда не про- изойти за все время существования системы. Легче найти противоположную ошибку - отсутствующая операция signal может в определенный момент привести к остановке, по крайней мере, одного из процессов, что достаточно просто обнаружить.
Компилятор не имеет возможности проверить, правильно ли используются семафоры, то есть, согласованы ли операции wait с операциями signal в других модулях и связаны ли семафоры с соответствующими ресурсами, поскольку это зависит от логики алгоритма. Более того, размещение семафоров в программе, как и других команд, произвольно. Забота о проверке правильности программы лежит на программисте. Использование структурного программирования существенно облегчает решение этой задачи.
Семафоры являются удобным средством высокого уровня для замеще- ния операции test_and_set и помогают избежать циклов занятого ожидания.
Однако их неправильное использование может привести к ситуации гонок и к тупикам.
4. События
В некоторых случаях несколько процессов, имеющих доступ к общим данным, должны работать с ними только при выполнении некоторых усло- вий, необязательно связанных с данными и разных для каждого процесса. Условием, например, может быть поступление новых данных на входной порт. Все процессы имеют следующую структуру
wait until condition;
modify data; end
Программа делится на две основные части. Сначала проверяются условия, а затем производятся операции над данными. Процедура проверки условия не изменяет данных и поэтому не требует какой-либо специальной защиты доступа. Однако доступ к данным для модификации должен быть координирован между процессами.
Если использовать семафоры, то их потребуется два: один - для кон- троля доступа в защищенную область с данными, а другой - для индикации изменения общих данных и, соответственно, необходимости повторной про- верки условий.
Применение первого семафора просто, а для второго необходимо сле- дить за числом ожидающих процессов и обеспечить, что при изменении ус- ловия ожидающие процессы будут активизированы с целью его проверки, то есть генерацию сигналов семафора, число которых равно числу ожидающих процессов. Это решение неудовлетворительно из-за большого расхода ма- шинного времени на многочисленные проверки, при этом в программе довольно легко ошибиться.
Для решения этой проблемы была введена новая переменная синхронизации event (событие), с которой связаны операции await (ждать) и cause (вызвать). Процесс, выполнивший операцию await (event), остается в состоянии ожидания, пока значение переменной event не изменится. Это изменение контролируется с помощью операции cause. При наступлении события, то есть выполнении операции cause (event), освобождаются все ожидающие его процессы, в то время как в случае семафора освобождается лишь один процесс. Операции с событиями можно реализовать либо с помощью двоичной переменной, либо с помощью счетчика, при этом основные принципы остаются одинаковыми.
Глагол to await имеет значение не только "ждать", но и "предстоять", то есть конструкцию await (А) можно трактовать, как "предстоит событие А". Глагол to cause означает "быть причиной", побудительным мотивом, "вы- звать что-либо". Конструкция cause (А) интерпретируется как "вызвать собы- тие А" (в литературе и в операционных системах иногда используются и дру- гие названия).
В противоположность семафору, переменную события нельзя исполь- зовать для защиты ресурса от конкурирующего доступа нескольких процес-
сов, поскольку по определению она освобождает все ожидающие процессы. Вышеприведенная проблема решается с помощью переменной события и се- мафора, если все программы имеют следующий вид
var mutex: semaphore; change: event; begin
while not condition do await(change); wait(mutex);
(* обработка общих переменных *) signal(mutex); cause(change); end;
При каждом изменении переменной event все процессы проверяют condition, и только те из них, для которых condition выполнено, могут продолжаться. Доступ к общему ресурсу защищен с помощью семафора mutex, при этом продолжается только один процесс. Это решение проще, чем основанное только на семафорах. Оно также более эффективно, поскольку процессы проверяют условия только тогда, когда это имеет смысл, т.е. после изменения значения соответствующих переменных.
Важный тип события в системах реального времени связан с внешними прерываниями. Программа обработки - обработчик прерываний - ждет прерывания. Когда оно происходит, исполнение обработчика возобновляется.
1. Взаимные исключения.
2. Предотвращение тупиков.
3. Синхронизирующие объекты операционных систем.
4. Сигналы.
1. Взаимные исключения
Запрет прерываний может носить только исключительный характер. Другой подход к защите ресурсов основан на взаимном исключении (mutual exclusion). Никакой процесс не может получить доступ к ресурсу, пока этот ресурс не будет явно освобожден процессом, который захватил его первым.
Корректная защита ресурсов предполагает следующее:
1. В любой момент времени доступ к защищенному ресурсу имеет только один процесс.
2. Процессы остаются взаимно независимыми. Остановка одного из процессов не должна препятствовать продолжению других.
Сформулированные требования соответствуют двум характеристикам
-безопасности и живучести. Безопасность (safety) означает, что доступ к за- щищенному ресурсу в любой момент времени возможен только со стороны одного из процессов. Живучесть (liveness) означает, что программа когда- нибудь обязательно будет выполнена, иными словами, что она не остановит- ся, и не будет ждать бесконечно. Безопасность - это статическое свойство, а живучесть - динамическое. Безопасности можно добиться за счет частичного или полного отказа от параллельного исполнения процессов. В действитель- ности наиболее надежными являются строго последовательные программы,
поскольку в этом случае вообще невозможен параллельный доступ к ресурсу из различных частей программы.
Распространенный метод управления доступом к ресурсам - примене- ние переменных защиты. Простейший метод защиты основан на одной двоичной переменной f1. Эта переменная изменяется обоими процессами таким образом, что один из них имеет доступ к защищенному ресурсу, когда f1 = true, а другой - когда f1 = false.
program protect_example (* защита ресурса *) var fl: boolean;
begin
f1 : = true; cobegin
while true do (* бесконечный цикл *) begin (* процесс А *)
repeat until f1 = true;
(* защищенный ресурс *) f1 := false;
…
end; (* процесс А *)
while true do (* бесконечный цикл *)
begin (* процесс В *) repeat until f 1 = false; (* защищенный ресурс *)
f1: = true;
…
end; (* процесс В *) coend;
end (* protect_example *)
Это решение удовлетворяет принципу взаимного исключения - два процесса проверяют переменную f1 и входят в критическую секцию только тогда, когда f1 имеет разные значения. Процесс, находящийся в критической секции, может считать, что он владеет ресурсом монопольно.
С другой стороны, это решение создает новые проблемы. Наиболее медленный процесс определяет общую скорость исполнения. Не имеет значения, является ли А быстрее, чем В или наоборот, поскольку каждый процесс для своего развития должен ждать, когда другой изменит значение f1. Кроме этого, если исполнение процесса по той или иной причине будет приостановлено, второй тоже должен быть остановлен, даже после одного цикла. Более того, циклы занятого ожидания (busy loop), в которых проверяется переменная защиты, напрасно расходуют процессорное время.
Эти проблемы - следствие введения управляющей переменной f1, которая для синхронизации доступа к ресурсу создает дополнительные связи между процессами. Модули, которые должны быть в принципе независимыми, связаны через f1, которая делает из двух модулей фактически последовательный процесс. Тот же результат можно получить, исключив f1 и выполняя оба процесса последовательно в одном цикле.
Другое решение — переустанавливать защитную переменную f1 после проверки ее значения и перед доступом к защищенному ресурсу т.е. все процессы должны иметь следующий вид
repeat until f1 = true; f1 := false;
(* защищенный ресурс *) f1 := true;
…
В этом случае процессы не связаны, и условие живучести выполнено, но решение не является корректным. Если прерывание для переключения процесса останавливает процесс А после контроля f1 = true, но перед при- сваиванием f1 = false, а процесс В производит аналогичную проверку f1, то оба процесса получают доступ к защищенному ресурсу, что противоречит требованию безопасности. Использование для защиты ресурса только одной переменной приводит к необходимости защищать переменную, поскольку она сама становится общим ресурсом.
Было предложено несколько решений, основанных на нескольких переменных защиты, но они скорее могут считаться курьезами, имеющими мало практического значения. В заключение отметим, что для синхронизации параллельных процессов лучше не вводить новых переменных, поскольку они добавляют новые связи и сами становятся общими ресурсами.
Чтобы обойти эту проблему, некоторые процессоры имеют команду test_and_set ("проверить_и_установить"), выполняющую проверку значения булевой переменной и ее переустановку в ходе одной операции, которую нельзя прервать. Смысл команды test_and_set в том, что на ее базе можно по- строить процедуры синхронизации и защиты ресурсов. Объединения в одной операции проверки переменной и ее модификации достаточно для обеспече- ния защиты.
Команда test_and_set функционально эквивалентна циклу read-modify- write на шине VMEbus. В обоих случаях гарантируется неразрывность двух операций - чтения и записи. Если команда test_and_set отсутствует в исполь- зуемом языке программирования или в наборе команд процессора, то ее можно смоделировать другими средствами при условии, что допустим запрет прерываний на короткое время.
Реализация критических секций и взаимного исключения в распреде- ленной системе сама по себе представляет проблему. Для начала, нет прямо- го эквивалента команды test_and_set, поскольку в этом случае имеется более одного процессора. В принципе, для каждого ресурса можно установить еди- ного координатора. Любой процесс, желающий получить доступ к ресурсу, сначала запрашивает координатора, который дает разрешение только одному из запрашивающих процессов. Однако это решение не является столь про- стым, как кажется. Единый координатор процессов является узким местом - и при его отказе ресурс остается либо заблокированным, либо незащищенным. Более того, если ресурс является просто переменной в памяти, то строить це- лый алгоритм для его защиты нерационально. На самом деле координатор
сам является ресурсом, за доступ к которому будет происходить конкуренция, не говоря уже о том, что в распределенной системе для посылки запроса нужно еще получить и доступ к каналу связи.
Возможной альтернативой является использование маркера, который перемещается между процессами. При этом в критическую секцию может войти только владелец маркера. Здесь возникают те же проблемы, что и в се- тях: в случае сбоя в процессе, являющемся владельцем маркера, должен су- ществовать механизм регенерации маркера. Поэтому для защиты небольшого числа переменных в памяти этот метод может оказаться громоздким и трудно реализуемым.
В заключение отметим, что в распределенных системах не существует практичного, эффективного и простого метода защиты ресурсов, сравнимого с командой test_and_set в однопроцессорных конфигурациях. Каждый случай необходимо оценивать индивидуально и выбирать соответствующее практи- ческое решение.
2. Предотвращение тупиков
Рассмотрим ситуацию, в которой два или больше процессов в системе приостановлены и ожидают каких-нибудь событий. Если такие события для каждого из ожидающих процессов могут быть инициированы только другим ожидающим процессом, то все процессы окажутся в состоянии бесконечного ожидания. Такая ситуация называется тупиком (deadlock) (рис. 1).
Похожая ситуация возникает, когда один или несколько процессов продолжают исполняться фактически на одном месте. Это называется зави- санием (starvation). Например, если процесс непрерывно проверяет значение условной переменной, которое не изменяется, поскольку все остальные про- цессы также заняты проверкой. Иными словами, процессы, оказавшиеся в тупике, находятся в очереди ожидания (т. е. они блокированы), а зависшие процессы исполняются, но фактически на одном месте.
Рисунок 1. - Тупик: а – взаимный; б – циркулярный
Тупик и одновременный доступ к защищенному ресурсу являются двумя симметричными проблемами, относящимися к чрезвычайным ситуа-
циям. В одном случае каждый процесс ждет других процессов, во втором - несколько процессов выполняются параллельно.
Можно предложить несколько подходов к решению проблемы тупиков. Простейшим из них является полное игнорирование проблемы и работа в режиме, когда при возникновении тупика некоторые процессы уничтожаются, например оператором, или производится ручная перезагрузка системы. Естественно, такое решение неприемлемо для систем реального времени, в особенности, если они должны работать без участия оператора.
Кроме стратегии с привлечением оператора, существуют еще и другие
-автоматического обнаружения и предотвращения. Первая предполагает перераспределение ресурсов для разрешения ситуации или, в крайнем случае, уничтожение одного из процессов. Вторая - распределение ресурсов так, что тупики не возникают вообще.
Для обнаружения тупиковой ситуации необходимо непрерывно прове- рять состояние всех исполняющихся процессов и их взаимодействие для обнаружения циклов типа показанных на рис. 1. Такой контроль можно делать с помощью фоновой (background) программы, периодически запускаемой планировщиком. Однако и такая программа не может гарантированно выявить все тупиковые ситуации. В распределенных системах информация о состоянии всех процессов на всех ЭВМ также должна поступать к программе обнаружения тупиковых ситуаций. Помимо повышенной нагрузки на сеть, которая при этом возникает, имеется риск несогласованности сообщений о состоянии процессов, в результате которого может произойти ошибочное выявление тупиковой ситуации с последующим уничтожением соответствующих процессов.
Предотвращение означает попытку вообще избежать ситуаций, кото- рые могут привести к тупику. Программы должны быть структурированы и взаимодействие процессов должно быть организовано таким образом, чтобы тупиковые ситуации были исключены вообще.
Для возникновения тупика должны выполниться одновременно не- сколько условий. Если хотя бы одно из них не выполнено, тупик не может возникнуть.
1. Взаимное исключение. Существуют системные ресурсы, к которым разрешен монопольный доступ.
2. Невытесняющее распределение ресурсов. Ресурс может быть осво- божден только тем процессом, который его захватил, или, иначе говоря, ре- сурс не может быть освобожден извне захватившего его процесса.
3. Последовательный захват ресурсов. Процесс запрашивает ресурсы по одному, т. е. по мере необходимости.
4. Захват ресурсов в обратном порядке.
Эти четыре утверждения косвенно дают ключ к предотвращению тупиковых ситуаций. Достаточно, чтобы одно из них не выполнялось, и тупик не возникнет.
Первое утверждение выполняется всегда, так как взаимное исключение является принципиальным для гарантии упорядоченного управления общими ресурсами.
Второе утверждение требует, чтобы операционная система распознавала тупиковые ситуации и реагировала соответственно, вынуждая процесс освободить ресурс. Это решение приемлемо лишь в случае, если допускается принудительное уничтожение процесса, и зависит от механизма восстановления.
В соответствии с третьим утверждением альтернативой выделению по одному является выделение всех необходимых ресурсов одновременно. Практичность этого решения, естественно, зависит от вида этих ресурсов и от того, могут ли без них обойтись другие процессы, пока не завершится за- хвативший их процесс. Если процессу выделяется десяток переменных на время выполнения небольшого количества команд, без информации о том, какие из них будут действительно использоваться — это одна ситуация, а ес- ли один процесс надолго блокирует доступ к целой базе данных — это со- всем другое дело.
Если система структурирована в соответствии с моделью "клиент- сервер" и работает на основе замкнутых транзакций, то проблему тупиков решить проще. В случае возникновения тупика можно просто отменить тран- закцию, а не уничтожать один или несколько процессов.
Нарушение четвертого запрета чаще всего приводит к тупикам. Если двум процессам требуются ресурсы А и В и первый их запрашивает в поряд- ке А - В, а второй - В - А, то для возникновения тупика достаточно того, что- бы первый процесс был прерван после захвата ресурса А и управление было передано второму, который, в свою очередь, захватывает ресурс В. После этого каждый процесс будет бесконечно ждать, пока другой не освободит за- хваченный ресурс.
Четвертое утверждение дает практический способ избежать тупиков. Тупик можно предотвратить, если определен точный порядок (последовательность) запроса ресурсов, соблюдаемый всеми процессами. В приведенном примере это означает, что "А должен быть распределен перед В" и что все процессы строго следуют этому правилу. При этом освобождение ресурсов должно происходить в порядке, обратном их выделению. Этот метод, в принципе, несложно применить при разработке системы реального времени, пока процессы находятся в руках одного или небольшой группы программистов, но его практическая ценность быстро уменьшается при возрастающем числе ресурсов или разделяемых переменных.
4. Сигналы
Сигнал дает возможность задаче реагировать на событие, источником ко торого может быть операционная система или другая задача. Сигналы вызывают прерывание задачи и выполнение заранее предусмотренных действий. Сигналы могут вырабатываться синхронно, то есть как результат работы самого процесса, а могут быть направлены процессу другим
процессом, то есть вырабатываться асинхронно. Синхронные сигналы чаще всего приходят от системы прерываний процессора и свидетельствуют о действиях процесса, блокируемых аппаратурой, например деление на нуль, ошибка адресации, нарушение защиты памяти и т. д.
Примером асинхронного сигнала является сигнал с терминала. Во многи ОС предусматривается оперативное снятие процесса с выполнения. Для этого пользователь может нажать некоторую комбинацию клавиш (Сtгl+С, Сtг1+Вгеаk) в результате чего ОС вырабатывает сигнал и направляет его активному процессу. Сигнал может поступить в любой момент выполнения процесса (то есть он является асинхронным), требуя от процесса немедленного завершения работы. В данном случае реакцией на сигнал является безусловное завершение процесса
В системе может быть определен набор сигналов. Программный код процесса, которому поступил сигнал, может либо проигнорировать его, либо прореагировать на него стандартным действием (например, завершиться), либо выполнить специфические действия, определенные прикладным программистом. В последнем случае в программном коде необходимо предусмотреть специальные системные вызовы, с помощью которых операционная система информируется, какую процедуру надо выполнить в ответ на поступление того или иного сигнала.
Сигналы обеспечивают логическую связь между процессами, а также между процессами и пользователями (терминалами). Поскольку посылка сигнала предусматривает знание идентификатора процесса, то взаимодействие посредством сигналов возможно только между родственными процессами, которые могут получить данные об идентификаторах друг друга.
В распределенных системах, состоящих из нескольких процессоров, каждый из которых имеет собственную оперативную память, блокирующие переменные, семафоры, сигналы и другие аналогичные средства, основанные на разделяемой памяти, оказываются непригодными. В таких системах синхронизация может быть реализована только посредством обмена сообщениями.
1. Общие области памяти.
2. Почтовые ящики.
3. Каналы.
4. Удаленный вызов процедур.
5. Сравнение методов синхронизации и обмена данными.
1. Общие области памяти
Взаимодействующие процессы нуждаются в обмене информацией. Поэтому многозадачная операционная система должна обеспечивать необходимые для этого средства. Обмен данными должен быть прозрачным
для процессов, т.е. передаваемые данные не должны изменяться, а сама процедура должна быть легко доступна для каждого процесса.
Простейший метод - использование общих областей памяти, к которым разные процессы имеют доступ для чтения/записи. Очевидно, что такая область представляет собой разделяемый ресурс, доступ к которому должен быть защищен, например, семафором. Главное преимущество общих областей памяти заключается в том, что к ним можно организовать прямой и мгновенный доступ, например один процесс может последовательно записы- вать поля, а другой затем считывать целые блоки данных.
При программировании на машинном уровне общие области размеща- ются в оперативной памяти по известным адресам. В языках высокого уровня вместо этого используются глобальные переменные, доступные нескольким дочерним процессам. Так, например, происходит при порождении потоков, для которых переменные родительского процесса являются глобальными и работают как общие области памяти. В случае возможных конфликтов дос- тупа к общим областям они должны быть защищены семафорами.
2. Почтовые ящики
Другой метод, позволяющий одновременно осуществлять обмен дан- ными и синхронизацию процессов, - это почтовые ящики. Почтовый ящик представляет собой структуру данных, предназначенную для приема и хра- нения сообщений (рис. 1). Для обмена сообщениями различного типа можно определить несколько почтовых ящиков.
Рисунок 1. - Работа почтового ящика
Во многих операционных системах почтовые ящики реализованы в виде логических файлов, доступ к которым аналогичен доступу к физическим файлам. С почтовыми ящиками разрешены следующие операции: создание, открытие, запись/чтение сообщения, закрытие, удаление. В некоторых системах поддерживаются дополнительные служебные функции, например счетчик сообщений в почтовом ящике или чтение сообщения без удаления его из ящика.
Почтовые ящики размещаются в оперативной памяти или на диске и существуют лишь до выключения питания или перезагрузки. Если они физи- чески расположены на диске, то считаются временными файлами, уничто- жаемыми после выключения системы. Почтовые ящики не имеют имен по- добно реальным файлам - при создании им присваиваются логические иден- тификаторы, которые используются процессами при обращении.
Для создания почтового ящика операционная система определяет ука- затели на область памяти для операций чтения/записи и соответствующие переменные для защиты доступа. Основными методами реализации являются
либо буфер, размер которого задается при создании ящика, либо связанный список, который, в принципе, не накладывает никаких ограничений на число сообщений в почтовом ящике.
В наиболее распространенных реализациях процесс, посылающий со- общение, записывает его в почтовый ящик с помощью оператора, похожего на оператор записи в файл
put_mailbox ( # 1, message)
Аналогично, для получения сообщения процесс считывает его из поч- тового ящика с помощью оператора вида
get _mailbox (# 1, message)
Запись сообщения в почтовый ящик означает, что оно просто копиру- ется в указанный почтовый ящик. Может случиться, что в почтовом ящике не хватает места для хранения нового сообщения, то есть почтовый ящик либо слишком мал, либо хранящиеся в нем сообщения еще не прочитаны.
При чтении из почтового ящика самое старое сообщение пересылается в принимающую структуру данных и удаляется из ящика. Почтовый ящик -это пример классической очереди, организованной по принципу FIFO. Операция чтения из пустого ящика приводит к различным результатам в зависимости от способа реализации — либо возвращается пустая строка (нулевой длины), либо операция чтения блокируется до получения сообщения. В последнем случае, чтобы избежать нежелательной остановки процесса, необходимо предварительно проверить число сообщений, имеющихся в данный момент в ящике.
3. Каналы
Канал (pipe) представляет собой средство обмена данными между дву- мя процессами, из которых один записывает, а другой считывает символы. Этот механизм был первоначально разработан для среды UNIX как средство перенаправления входа и выхода процесса. В ОС UNIX физические устрой- ства ввода/вывода рассматривают как файлы, а каждая программа имеет стандартное устройство ввода (вход) и стандартное устройство вывода (выход), клавиатуру и экран монитора - можно переопределить, например, с помощью файлов. Когда выход одной программы перенаправляется на вход другой, создается механизм, называемый каналом (в операционных системах для обозначения канала используется символ "|"). Каналы применяются в операционных системах UNIX, OS/9 и Windows NT в качестве средства связи между процессами (программами).
Каналы можно рассматривать как частный случай почтового ящика. Различие между ними заключается в организации потока данных - почтовые ящики работают с сообщениями, то есть данными, для которых известны формат и длина, а каналы принципиально ориентированы на неструктуриро- ванные потоки символов. В некоторых операционных системах, однако, воз- можно определить структуру передаваемых по каналу данных. Обычно про- цесс, выполняющий операцию чтения из канала, ждет, пока в нем не появят- ся данные. В настоящее время операционные системы включают методы, по-
зволяющие избежать блокировки программы, если это нежелательно с точки зрения ее логики.
Операции над каналами эквивалентны чтению/записи физических файлов. Они включают функции, как определить, открыть, читать, записать, закрыть, удалить. Дополнительные операции могут устанавливать флаги ре- жима доступа, определять размер буфера и т.д.
Благодаря тому, что ввод/вывод в файл и на физические устройства и вход/выход процессов трактуются одинаково, каналы являются естественным средством взаимодействия между процессами в системах "клиент-сервер". Механизм каналов в UNIX может в некоторых случаях зависеть от протокола TCP/IP, а в Windows NT каналы работают с любым транспортным протоколом. Следует иметь в виду, что внешне простой механизм каналов может требовать больших накладных расходов при реализации, особенно в сетевых системах.
4. Удаленный вызов процедур
Модель "клиент-сервер" построена на обмене сообщениями "регуляр- ной" структуры, которые можно передавать, например, через механизм ка- налов.
Однако основной процедурой обмена данными и синхронизации в среде "клиент-сервер" является удаленный вызов процедур (Remote Procedure Call - RPC). Последний может рассматриваться как вызов подпрограммы, при котором операционная система отвечает за маршрутизацию и доставку вызова к узлу, где находится эта подпрограмма. Нотация обращения к про- цедуре не зависит от того, является ли она локальной или удаленной по от- ношению к вызывающей программе. Это существенно облегчает програм- мирование.
В системе реального времени существенно, является RPC блокирую- щим или нет. Блокирующий RPC не возвращает управление вызывающему процессу, пока не закончит свою работу, например, пока не подготовит дан- ные для ответа. Неблокирующие RPC возвращают управление вызывающей процедуре по истечении некоторого времени (time out) независимо от того, завершила ли работу вызываемая процедура; в любом случае вызывающая программа получает код, идентифицирующий результат выполнения вызова,
- код возврата. Таким образом, неблокирующие RPC имеют важное значение, с точки зрения гарантии живучести системы.
5. Сравнение методов синхронизации и обмена данными Может показаться, что основные задачи, связанные с параллельным программированием, взаимным исключением, синхронизацией и коммуни- кациями между процессами, имеют мало общего, но, в сути - это просто раз- ные способы достижения одной цели. Методы синхронизации можно ис- пользовать для организации взаимного исключения и коммуникаций. Анало- гично, с помощью техники коммуникаций между процессами можно реали- зовать функции синхронизации и взаимного исключения процессов.
Например, семафор эквивалентен почтовому ящику, в котором накап- ливаются сообщения нулевой длины, - операции signal и wait эквивалентны
операциям put и get почтового ящика, а текущее значение семафора эквива- лентно числу помещенных в почтовый ящик сообщений. Аналогично можно организовать взаимное исключение и защиту ресурсов с помощью почтовых ящиков. В этом случае сообщение выполняет функцию "маркера". Процесс, получивший этот "маркер", приобретает право входить в критическую сек- цию или распоряжаться ресурсами системы. При выходе из секции или осво- бождении ресурса процесс помещает "маркер" в почтовый ящик. Следующий процесс читает из почтового ящика, получает "маркер" и может войти в кри- тическую секцию.
Связь между разными подходами имеет практическое значение в том случае, если в системе применяется только один из них, а все остальные нужно строить на его основе. Современные операционные системы, поддер- живающие многозадачный режим и операции в реальном времени, применя- ют все упомянутые методы. Передача сообщений и доступ к общим областям памяти медленнее, чем проверка и обновление семафора и переменной собы- тия, и требует дополнительных накладных расходов. Если есть выбор между различными методами синхронизации и взаимодействия, следует использо- вать тот из них, который лучше решает конкретную проблему - результи- рующая программа будет понятнее и, возможно, быстрее работать. Кроме то- го, весьма важно оценить, насколько эффективно в имеющейся программной среде реализуются конкретные решения. Следует избегать незнакомых и не- естественных конструкций.
В распределенных системах всегда существует риск потерять сообще- ние в сети. Если сетевая система сконфигурирована так, что она контролиру- ет правильность передачи сообщения, и имеются средства для повторной пе- редачи утраченных сообщений, то прикладная программа не должна осуще- ствлять дополнительные проверки. Обычно нижний уровень операционной системы и процедуры сетевого интерфейса передают на более высокий уровень код возврата, который прикладная программа должна проверить, чтобы убедиться, была ли попытка успешной или нет, и при необходимости повторить ее.
Если контроль не предусмотрен, например, используется служба IP без транспортного протокола TCP, то прикладная программа несет ответственность за проверку результата передачи. Эта операция сложнее, чем это кажется. Можно использовать сообщение, подтверждающее прием, но нет гарантии, что оно само, в свою очередь, не будет потеряно и отправитель не начнет новую передачу. Эта проблема не имеет общего решения - стратегии передачи сообщений должны в каждом случае рассматриваться индивидуально. Возможным решением является помечать и нумеровать каждое сообщение таким образом, чтобы отправитель и получатель могли следить за порядком передачи. Этот метод используется в некоторых типах коммуникационных протоколов.
1. Обзор основных направлений развития операционных систем реального времени.
2. Операционная система Spox.
3. Операционная система Multiprox.
4. Операционная система VCOS.
5. Операционная система DEASY.
6. Операционная система UNIX.
7. Операционная система OSF/1 и DСЕ.
8. Операционная система VAX/VMS.
1. Обзор основных направлений развития операционных систем реального времени
Операционные системы реального времени (ОСРВ) используются в тех случаях, когда работоспособность обслуживаемой ими цифровой системы определяется не только результатом обработки поступившей информации, но и длительностью времени получения результата. Области практического применения ОСРВ очень широки. Это системы автоматизации производства, контрольно-измерительные системы, телекоммуникационная аппаратура, авиационно-космическая и военная техника, транспорт, системы обеспечения безопасности и ряд других приложений. В этих приложениях ОСРВ должна обеспечить не только получение необходимого логического результата — отклика на внешние события, но и реализовать требуемые интервалы времени между событиями и откликом или заданную частоту приема внешних данных и выдачи результатов.
Современные ОСРВ должны удовлетворять ряду противоречивых тре- бований: малый объем, достаточный для размещения в резидентной памяти системы; малое время отклика; реализация многозадачного режима с гибким механизмом приоритетов, наличие сервисных функций и средств поддержки для разработки прикладных программ и ряд других. В настоящее время раз- работчику систем предлагается ряд ОСРВ, имеющих различные харак- теристики и прошедших апробацию в многочисленных областях применения, что позволяет ему найти компромиссное решение для выполнения постав- ленной задачи. Наиболее часто в системах на базе микропроцессоров и мик- роконтроллеров фирмы Motorola используются следующие ОСРВ: OS-9 фирмы Microware Systems; VxWorks фирмы WindRiver Systems; LynxOS фирмы Lynx Real-Time Systems; pSOS+ фирмы Integrated Systems; QNX фир- мы Quantum Software Systems; VRTX/OS 3.0 фирмы Ready Systems; Nucleus фирмы Accelerated Technology; RTXC фирмы Embedded System Products; OSE фирмы Enea Data, Precise/MQX фирмы Intermetrics Microsystems Software; VMEexec фирмы Motorola.
Подразделяют ОСРВ на два класса - системы "жесткого" и "мягкого" реального времени (РВ). Системы "жесткого" РВ имеют минимальные объем и время отклика, но обладают ограниченными сервисными средствами. Ти- пичным примером ОСРВ этого класса служит VMEexec. Системы "мягкого" РВ требуют большего объема памяти, имеют более длительное время откли-
ка, но удовлетворяют широкому спектру требований пользователя по режиму обслуживания задач, уровню предоставляемого сервиса. Примером такой ОСРВ может служить OS-9/9000.
Однако для современных ОСРВ данная классификация является весьма условной. Ряд ОСРВ, относящихся к классу "жестких", имеют средства интерфейса, которые позволяют, в случае необходимости, использовать высокоэффективные отладчики или интегрированные среды разработки, обеспечивая, таким образом, пользователя набором средств поддержки программирования-отладки систем. Например, VMEexec может использоваться совместно с интегрированной средой MULTI фирмы GreenHills Software, VxWorks с интегрированной средой Tornado, в составе которой поставляются отладчик CrossWind и GNU-компиляторы фирмы Cygnus Support, VRTX и pSOS с отладчиком XRAY и компиляторами фирмы Microtec Research. С другой стороны, системы "мягкого" РВ реализуются по модульному принципу, что позволяет использовать только те средства, которые необходимы в данном приложении. В результате для конкретного применения достигается существенное сокращение объема необходимой памяти и времени отклика. Например, для ядра OS9/9000 время отклика не превышает 20 мкс (для VMEexec, VxWorks, pSOS - менее 10 мкс), что является вполне достаточным для многих приложений.
Для создания многопроцессорных систем, работающих в режиме ре- ального времени (РВ), необходимо базовое программное обеспечение, а именно операционная система. ПО этого направления делится на две боль- шие группы. К первой группе можно отнести небольшие модули, загружае- мые на ЦОС-процессоре, а также библиотеки подпрограмм для основного процессора, позволяющие реализовать обмен данными. ЦОС-процессор в та- кой системе является подчиненным процессором, управляемым основным (host-процессором). Организация функций систем РВ основана на обработке прерываний и механизме обмена сообщениями. Главное достоинство этих систем – небольшая цена. К системам этого типа можно отнести VCOS и DEASY.
Вторая группа операционных систем – это операционные системы ре- ального времени типа Spox или Multiprox. Цена этих систем составляет по- рядка 20-40 тыс. долларов, но возможности их значительно выше. Операци- онная система Spox фирмы Spectron Microsystems – одна из ведущих систем, используемых в системах РВ для различных применений, в том числе на платформах с модулями ЦОС. Spox – это специализированная операционная система реального времени, создающая операционное окружение для прило- жений по обработке данных в реальном режиме.
Другая система – Multiprox фирмы Comdisco. Multiprox – это система разработки, которая позволяет инженерам графически формировать прило- жения и разделять ЦОС-задачи для нескольких ЦОС-процессоров.
2. Операционная система Spox
Spox (создана фирмой Spectron в 1987 г.) является операционной сис- темой, которая структурирована для обработки сигналов и приложений с ин-
тенсивной математикой. Это высокоуровневое окружение для приложений имеет простые в использовании свойства, включая независимый от устройств ввод-вывод, удобные установки процессора и интерфейс с основной маши- ной (имеется в виду основная ОС). Spox обеспечивает объектно- ориентированную модель для ЦОС и математической обработки.
В последние годы фирма Spectron ввела OSPA (открытая архитектура обработки сигналов) – расширение к Spox для ЦОС-приложений на основной машине. Запускаясь под MS Windows, OSPA обеспечивает интерфейс на уровне основной машины. Используя этот интерфейс, host-приложения могут планировать и контролировать работу многочисленных программ на ЦОС- сопроцессорах (но это не параллельная обработка). OSPA является своего рода интерфейсом API (интерфейсом прикладных программ), который облег- чает интеграцию ЦОС-обработки в интерактивное приложение.
Spectron изначально развивал Spox для TMS320C30, но сейчас опера- ционная система запускается также и на Motorola 96002, TI C40 и Analog Device 21020. Spectron также выпускает версию Spox для параллельной обра- ботки. Используемая модель обработки сообщений поддерживает многоза- дачность. Многозадачное расширение построено вокруг примитивов, осно- ванных на сообщениях, и может обеспечить высокоскоростную передачу данных через каналы ввода-вывода. Spox позволяет совместно использовать память, установленную на отдельном модуле. SPOX поставляется в следую- щих четырех основных конфигурациях.
Однородные встраиваемые системы. Процессор ЦОС играет роль как общецелевого, так и специализированного процессора. По существу, ЦОС-процессор замещает специализированный контроллер. Со SPOX ЦОС- процессор одновременно выполняет алгоритмы обработки сигналов вместе со сложным контролем по связи задач, прежде выполняемых на специализи- рованных контроллерах. Для приложений, требующих дополнительных мощностей, можно просто использовать дополнительные ЦОС-процессоры. SPOX поддерживает многопроцессорность.
Разнородные встраиваемые системы. Встроенные компьютерные системы реального времени с полными чертами операционной системы (на- пример, VXWorks, OS-9, LynxOS) выполнены на основе ЦОС-подсистем. Это традиционная конфигурация, где ЦОС-подсистема прибавляется к встраи- ваемой компьютерной системе. Извлекая выгоду из приложений ЦОС в этих системах, Spectron предлагает сбалансированный подход, объединяющий традиционные встраиваемые компьютерные системы (используемые в про- мышленности) и DSP. Это открывает новый диапазон возможностей для про- ектирования встроенного управления.
Компьютерные интегрированные системы. В данной конфигурации рабочие станции контролируют ЦОС-подсистемы. Приложение ЦОС запускается в привычном интерактивном окружении (MS- Winows, Unix, DOS), выполняя приложение как тест или измерение, мониторинг контроля процесса, медицинские представления, сбор данных.
Здесь приложение имеет ресурсы как основной, так и ЦОС-системы, действуя под управлением рабочей станции.
Мультимедиа системы. Компьютер требует мощных вычислительных затрат по воспроизведению мультимедийных приложений, что соответствует задачам ЦОС: аудиозапись и воспроизведение, видео в реальном режиме, распознавание речи, синтез звука, телекоммуникационные функции, такие, как факс, модем. ЦОС-модуль размещается либо на материнской плате, либо на дополнительной плате, а SPOX усиливает возможности мультимедиа в привычном пользовательском окружении.
SPOX поддерживает высокопроизводительную многозадачность, обработку прерываний, управление памятью, ввод-вывод в реальном времени и большой набор функций по обеспечению взаимосвязи между задачами и процессорами. SPOX имеет математическую и специализированную ЦОС- библиотеку функций, многие из которых написаны на ассемблере для повы- шения производительности. SPOX поддерживает модель объектно- ориентированного программирования над векторами, матрицами и фильтра- ми. Для обеспечения этого имеется символьный отладчик и компиляторы языков высокого уровня, таких, как Си. Библиотека SPOX может использо- ваться на различных платформах, позволяя сосредоточиться на создании соб- ственного приложения, не отвлекаясь на зависимость от платформы.
3. Операционная система Multiprox
Второе направление в развитии ПО – это Multiprox фирмы Comdisco,
– пакет, который является новым выбором SPW (Signal Processing Workstation). Используя инструментальное множество, инженеры могут определять ЦОС-приложения графически, используя графические объекты, которые представляют компоненты ЦОС- обработки. Multiprox позволяет инженерам выделять разделы среди потоков данных, рисовать диаграмму течения данных и определять порции, работающие на разных процессорах.
Дополнительно SPW-инструментальное множество и Multiprox автоматически преобразуют диаграммы к процессорно-зависимому Си-коду и встраивают в ПО связи или межпроцессорную коммуникацию, чтобы пере- давать данные от одного процессора другому. Диаграммы потоков данных преобразуются в Си-программу, содержащую подпрограммы, некоторые из которых написаны на ассемблере и вручную оптимизированы. Таким обра- зом, инженер может использовать инструменты, чтобы распределять высоко- уровневое ПО на различные процессоры или смешивать процессоры.
4. Операционная система VCOS
VCOS (Visible Caching Oparating System) делает процессоры ЦОС со- процессорами. VCOS – переносимая, многозадачная и многопроцессорная операционная система реального времени. VCAS (VCOS Application Server) – резидентная на host-системе программа, загружает и связывает ЦОС-задачи и обеспечивает управление памятью и буферизацию ввода-вывода между host- и ЦОС-процессорами.
VCOS является ―минимальной‖ операционной системой – она занимает менее 400 32-разрядных слов в памяти процессора. ОС использует
память host-системы для запоминания программы и данных. Она использует ее как ресурс, чтобы кэшировать данные и код для более быстрой обработки на процессоре. VCOS является ―подчиненной‖ по отношению к host ОС, которая располагает и контролирует VCOS структуры данных, избегая таким образом соперничества между подсистемами при доступе к памяти. VCOS выполняется в высоко приоритетном режиме.
VCOS поставляется вместе с полной библиотекой ЦОС-функций для мультимедийных приложений. Эти приложения включают V.32 модем, V.29 FAX модем, видеозапись, обработку речи, графику, функции сжатия аудио- и видеоинформации.
5. Операционная система DEASY
Операционная система DEASY предназначена для разработки, отладки и выполнения программ ЦОС для процессорных модулей DSP3x фирмы ―Инструментальные системы‖. DEASY – однозадачная система реального времени. Ни одна из системных функций не блокирует обработку внешних событий (прерываний процессора) на величину более 500 нс.
Основная концепция при разработке программ с использованием DEASY заключается в том, что вокруг сигнального процессора создается виртуальная операционная среда, позволяющая ему играть роль центрально- го процессора для всего вычислительного комплекса, построенного на базе ПК. Таким образом, обеспечивается прозрачный доступ процессора ЦОС ко всем ресурсам ПК, включая экран монитора, клавиатуру, дисковые устройст- ва, память, порты ввода-вывода и т.д. При этом облегчается процесс переноса программ из другой среды программирования и быстрое прототипирование программ обработки сигналов с использованием традиционных способов.
Операционная система DEASY включает набор библиотек и утилит для составления и отладки прикладных программ ЦОС.
Библиотека System.a30 содержит набор функций для управления про- цессором TMS320C30 и доступа к его внутренним регистрам из Си- программ.
Библиотека Host.lib состоит из функций для инициализаций, загрузки, управления и обмена информацией между платой ЦОС и ПК.
Библиотека Deasy.a30 содержит набор функций-аналогов библиотеки компилятора Borland C и используется для ―прозрачного― доступа к ресурсам ПК из прикладной программы, выполняемой на плате ЦОС.
Библиотека Bgi.a30 включает в себя функции-аналоги графической библиотеки компилятора Boland C и используется для доступа к графическим ресурсам IBM PC.
Исполняющая среда Deasy.exe предназначена для загрузки и выполне- ния прикладных программ, составленных с использованием приведенных выше библиотек. Она также содержит простейший диалоговый монитор ин- терактивного взаимодействия с платой ЦОС.
Символьный отладчик Kg30.exe, или символьный отладчик Cq30.exe, предназначен для отладки прикладных программ, выполняемых на плате ЦОС.
Библиотеки системных функций System и Host. Для организации работы многозадачного режима необходимо обмениваться сообщениями, которые отображают текущее состояние работы программ. Например, после окончания вычислений на одном процессоре (DSP) необходимо сообщить центральному процессору (CPU) о том, что он может забрать данные. При пересылке данных с CPU на DSP необходимо сообщить DSP, что он должен производить расчет. Библиотеки системных функций System и Host позволяют организовать обмен сообщениями и данными.
Библиотека System предназначена для компоновки с программами пользователя, написанными на языке Си или на Ассемблере для процессора TMS320C30. Библиотека Host предназначена для управления платой DSP со стороны ПК из программы пользователя, написанной на языке Си. Данная библиотека поставляется для компиляторов: Borland C/C++, Microsoft C, Watcom C.
6. Операционная система UNIX
Операционная система UNIX представляет собой многозадачную, многопользовательскую операционную систему и является в настоящее время одной из наиболее распространенных в мире. Она была первоначально разработана в 1970-е годы в AT&T Bell Laboratories. Особое внимание к переносимости, интерфейс пользователя, построенный на немногих базовых принципах, и возможность объединения различных UNIX-систем в сети независимо от аппаратной платформы очевидным образом способствовали успеху и распространению UNIX.
С момента своего появления система UNIX непрерывно развивалась и в настоящее время существует в нескольких модификациях. Основными ее распространителями являются компании AT&T Bell Laboratories и Berkeley Software Distribution. Почти все производители вычислительной техники предлагают UNIX либо как коммерческий продукт третьих фирм, либо как специально адаптированную версию для собственной аппаратной платфор- мы. Некоторые специальные предложения отличаются скорее особенностями лицензирования, а не различием в выполняемых ими функциями. Кроме того, для сохранения совместимости и переносимости версии UNIX разных произ- водителей не могут слишком сильно отличаться друг от друга.
В UNIX были введены средства, которые впоследствии были позаимствованы другими операционными системами. На базе UNIX была разработана операционная система OSF/1, а многие функции были включены в Windows NT. UNIX также явилась основной базой для разработки важных коммуникационных интерфейсов, в частности протокола TCP/IP и протокола пользовательского терминала X Window.
UNIX состоит из небольшого ядра, управляющего системными ресур- сами (процессор, память и ввод/вывод), а остальная часть процедур операци- онной системы, и в частности управление файловой системой, работают как пользовательские процессы. Типичная операционная система UNIX содер- жит 10000-20000 строк на языке С и 1000-2000 строк машинно- ориентированных программ на ассемблере, которые разрабатываются от-
дельно для каждой аппаратной платформы. Ядро представляет собой единую резидентную программу размером от 100 Кбайт до 1 Мбайт в зависимости от платформы и выполняемых функций. При переносе системы UNIX на кон- кретную платформу требуется переписать заново только машинно- зависимую часть ядра. Это означает, что UNIX может работать на многих аппаратных платформах с идентичным системным интерфейсом.
Ядро UNIX имеет недостаточно продуманную структуру. Это следст- вие ее быстрого успеха и распространения, поскольку каждая новая версия должна была быть совместима с предыдущей. Первоначально система UNIX была разработана как многопользовательская, а не для приложений реально- го времени. Из-за того, что подпрограммы операционной системы работают как пользовательские процессы, но с наивысшим приоритетом, назначенным системой, невозможно прерывать также те системные вызовы, выполнение которых занимает много времени, что увеличивает время реакции системы. Это является существенным недостатком для задач реального времени, осо- бенно управляемых прерываниями. В UNIX используется довольно сложное описание контекста, что увеличивает время переключения процессов. Из-за того, что в UNIX все операции с каналом построены на основе переключения процессов, применение этого механизма для связи между процессами в при- ложениях реального времени может приводить к задержкам.
Стандартно процессы в UNIX протекают с разделением времени. Для того чтобы дать всем процессам возможность исполняться, применяется ди- намическое распределение приоритетов. Процессу, готовому для исполнения, сначала присваивается его номинальный приоритет. Во время исполнения значение этого приоритета уменьшается до тех пор, пока он не становится меньше приоритета следующего из ожидающих процессов, который после этого выбирается для исполнения. В результате процессы с более высоким начальным приоритетом получают большую долю процессорного времени, и при этом все процессы периодически исполняются. Системные обращения синхронизированы с вызывающим процессом - он должен ждать, пока за- прошенная операция не выполнится и ему не будет возвращено управление.
Важной особенностью, реализованной в UNIX, является одинаковая трактовка всех устройств. Внешние устройства ввода/вывода рассматривают- ся как файлы. Это существенно упрощает программы, требующие опреде- ленной гибкости, так как можно осуществить перенаправление ввода/вывода между файлами или внешними устройствами, такими как локальный или удаленный терминал или принтер, без изменения кода программы. Это также важно и с точки зрения машинной независимости программ.
Общим и вызывающим критику недостатком UNIX является его не- дружественный пользовательский интерфейс. Все еще в ходу старые и непо- нятные команды, а если и есть заменяющие их, то с именами или сокраще- ниями, которые столь же неестественны, как и предыдущие. В некоторых системах пользовательские оконные интерфейсы и меню способны в основ- ном "транслировать" выбранные действия в стандартные команды UNIX. Положительной особенностью команд UNIX является то, что благодаря
стандартизации ввода/вывода и механизму каналов несколько команд можно объединить в одной строке, причем выход одной команды является входом следующей. Такая техника позволяет для выполнения сложных операций вместо длинных командных файлов использовать всего несколько строк.
Хотя в начале UNIX была многозадачной операционной системой, не предназначенной для работы в реальном времени, из-за широкого распро- странения в научной и технической среде стала очевидной необходимость ее адаптации и к задачам реального времени. Поэтому новые версии поддерживают такие функциональные элементы систем реального времени, как семафоры, разделяемую память, обмен сигналами между процессами, приоритетное управление задачами и прямой доступ к внешним устройствам. POSIX представляет собой машинно-независимый интерфейс операционной системы, базирующийся на UNIX, определенный стандартом IEEE 1003.1- 1988.
7. Операционная система OSF/1 и DСЕ
Первоначальные версии UNIX не требовали лицензий и были доступны практически всем для свободного использования, что отчасти объясняет популярность этой системы. При выпуске System V компания AT&T решила распространять ее только с оплатой лицензий. Некоторые наиболее крупные производители ЭВМ - Digital, Equipment, Hewlett Packard, IBM и др. - отреагировали на это, создав организацию Open Software Foundation (OSF) для того, чтобы не зависеть от диктата одной единственной компании-поставщика операционных систем. OSF разработала UNIX- coвместимую операционную систему, а также другие продукты без лицензионных ограничений со стороны одной компании.
OSF/1 является модульной операционной системой, основанной на Mach, машинно-независимом мультипроцессорном ядре, разработанном в Carnegie-Mellon University (г. Питтсбург, США) в качестве инструмента для эмуляции других операционных систем. На основе Mach действительно уда- ется одновременно эксплуатировать различные операционные системы на одной ЭВМ.
Для обеспечения переносимости OSF/1 совместима с AT&T UNIX System V и спецификациями программных интерфейсов Berkeley. Поскольку Mach и OSF/1 не содержит какого-либо кода UNIX, проблема лицензирова- ния со стороны третьих компаний полностью снята.
В дополнение к средствам UNIX OSF/1 предлагает собственный набор функций, облегчающих разработку и выполнение программ. OSF/1 предна- значена для работы в сетевой среде и поддерживает протокол TCP/IP. Файловая система OSF/1 также совместима со службой NFS протокола TCP/IP.
OSF разработала и другие продукты для распределенной вычисли- тельной среды. OSF/Motif является графическим интерфейсом пользователя, обеспечивающим стандартное взаимодействие приложения с графическим терминалом.
Распределенная вычислительная среда (Distributed Computing Environ- ment - DCE) представляет собой набор служб и средств для разработки, ис- полнения и поддержки приложений в распределенной среде. DСЕ может быть интегрирована с OSF/1, но является независимой от нее и в действи- тельности может эксплуатироваться на базе других операционных систем.
8. Операционная система VAX/VMS
VMS является операционной системой для ЭВМ компании Digital Equipment с 32-разрядным процессором серии VAX. Ее популярность в при- ложениях управления связана в основном с качеством техники, на которой она используется, и большим количеством предусмотренных средств разра- ботки. VMS может применяться как в среде реального времени, так и в мно- гопользовательской среде с соответствующими средствами защиты.
VMS предоставляет широкий набор функций, стандартный и ясный интерфейс для прямых обращений из программ. Это позволяет осуществлять интеграцию любых языков со всеми функциями операционной системы. Из функций реального времени VMS имеет почтовые ящики в форме логиче- ских, состоящих из записей файлов, возможность создания резидентных под- программ и обработку прерываний. Процесс в VMS может управлять усло- виями своего собственного исполнения (приоритет, распределение памяти), создавать другие процессы и управлять их исполнением. Иерархическое управление препятствует процессам с низким приоритетом модифицировать параметры исполнения процессов с высоким приоритетом.
Как и во всех больших операционных системах, в VMS возникают проблемы в случаях, когда предъявляются жесткие требования по времени. По этой причине и ввиду популярности системы VMS, была разработана специальная версия, приспособленная для приложений реального времени, которая называется VAX/ELN. Она состоит из двух различных продуктов - рабочей среды для исполнения прикладных программ на целевой ЭВМ и пакета для разработки программ с компиляторами для различных языков. Разработка программ осуществляется на большом комплексе, имеющем ресурсы для подготовки системы, которая в итоге содержит только программные модули, необходимые для конкретного приложения. Затем в окончательном виде система загружается на рабочую ЭВМ.
Таким образом, операционная система предоставляет процессам логи- ческую среду, состоящую из времени ЦП и оперативной памяти. Операцион- ные системы для многопользовательских приложений и приложений реаль- ного времени имеют много общего, но техника программирования должна быть разной - приложения реального времени могут требовать времени реак- ции порядка 1 мс. При программировании в реальном времени используются специальные функции для координации работы различных процессов. Для обычных программ эти функции не требуются. Кроме этого, программы ре- ального времени управляются прерываниями и могут явно ссылаться на вре- мя.
Центральная проблема многозадачного программирования и програм- мирования в реальном времени - координация доступа к защищенным ресур-
сам. Существует много общего между распределением процессорного време- ни, защитой ресурсов и управлением доступом к общей шине. Во всех этих случаях ресурс - процессорное время, память, шина - в определенном смысле ограничен и должен распределяться между различными объектами безопас- но, эффективно и справедливо. Стратегия разделения ресурсов, которая мо- жет основываться на простом циклическом или сложном динамическом ме- ханизме планирования, должна позволять избегать тупиков и блокировок, обеспечивать выделение ресурсов всем запрашивающим объектам и макси- мальную эффективность исполнения процессов. На нижнем уровне наиболее простым средством синхронизации является инструкция test_and_set. Наибо- лее часто используемые методы синхронизации и связи — это семафоры и почтовые ящики, которые в разных операционных системах реализуются по- разному.
Результаты теории параллельного программирования играют важную роль на практике, так как соответствующие решения подкреплены формаль- ными доказательствами. Это справедливо в особенности для систем реально- го времени, поскольку тестирование программ в этом случае представляет особую трудность. Применение проверенных методов дает разумную гаран- тию правильности соответствующих приложений.
1. Операционная система реального времени OS-9.
2. Операционная система VxWorks.
1. Операционная система реального времени OS-9
В качестве примера современной ОСРВ рассмотрим OS-9, которая широко используются в системах автоматизации производства и телекоммуникационных системах, реализованных на базе микропроцессоров и микроконтроллеров фирмы Motorola. Эта ОСРВ имеет две версии: OS-9 написана на языке Ассемблера Motorola 68K и предназначена для работы с семействами М680х0 и М683хх, OS-9000 написана на языке С и может работать с семействами МРС6хх, МРС5хх, MPCSxx, MCF52xx, а также с микропроцессорами ряда других производителей: Intel 486, Pentium, SPARC, MIPS. Обе версии обеспечивают полную совместимость объектных кодов, поэтому для них обычно используется общее название OS-9. В качестве ин- струментального компьютера OS-9 использует IBM-PC, работающие в среде Windows, или рабочие станции SUN, HP, IBM RS/6000 с операционными системами типа UNIX.
Характерными особенностями OS-9 являются модульность и гибкость ее структуры. Модульность обеспечивает возможность конфигурации целевой ОСРВ в соответствии с классом решаемых задач. За счет исключения неиспользуемых модулей достигается сокращение объема памяти и стоимости системы. Гибкость структуры позволяет достаточно
просто и быстро производить реконфигурацию системы, расширение ее функциональных возможностей.
Все функциональные компоненты OS-9 - ядро реального времени, файловые менеджеры, средства (OS-9 kernel), средства общего управления внешними устройствами (I/O man), разработки - реализованы в виде автономных модулей (рис.1). Комбинируя эти модули, разработчик может создавать целевые операционные системы различной конфигурации и функциональных возможностей - от несложных резидентных ОСРВ, хранящихся во внутреннем ПЗУ микроконтроллера, до сложно- функциональных многопользовательских систем разработки. Все модули OS- 9 могут размещаться в ПЗУ. Любые модули могут удаляться или добавляться с помощью простых команд, не требующих повторной компиляции или перекомпоновки.
OS-9 предоставляет пользователю возможность выбора ядра в зависимости от функционального назначения системы.
Ядро Atomic имеет малый объем (28 Кбайт) и обеспечивает минимальное время отклика. Например, при использовании микропроцессора MC68040 с тактовой частотой 25 МГц время реакции ядра на запрос прерывания составляет всего 3 мкс, что соответствует быстродействию систем "жесткого" РВ. Это ядро реализует минимальное число сервисных функций (дистанционную загрузку, связь с локальной сетью, управление ведомыми микроконтроллерами) и применяется в системах, встраиваемых в различную аппаратуру.
Ядро Standard обеспечивает выполнение широкого набора функций сервиса и разработки прикладных программ. Однако для реализации этих функций требуется больший объем памяти - 67 Кбайт ПЗУ и 38 Кбайт ОЗУ для систем на базе М68х0х,М683хх (версия OS-9), до 512 Кбайт для этих же систем, использующих пакет поддержки обмена по сети Интернет, 75 Кбайт ПЗУ и 24 Кбайт ОЗУ для систем на базе PowerPC (версия OS-9000). Применение ядра Standard с различным набором других функциональных модулей позволяет реализовать системы различной сложности и назначения - от встраиваемых в аппаратуру контроллеров с резидентным программным обеспечением и простейшими средствами ввода-вывода до сложно- функциональных систем класса рабочих станций с развитой сетевой поддержкой и обеспечением разнообразных функций сервиса, включая мультимедиа.
Файловыми менеджерами называются модули, управляющие логическими потоками данных, каждый из которых имеет определенное функциональное назначение и спецификацию. В состав OS-9 входят более 20 файловых менеджеров, которые можно разделить на три группы: стандартные, сетевые и коммуникационные, графические и мультимедиа. Рассмотрим основные из них (рис.2).
Стандартные менеджеры входят в основной комплект системы и предназначены для выполнения базовых функций обмена с внешними устройствами. К ним относятся следующие файловые менеджеры:
Рисунок 1. - Модульная структура ОСРВ OS-9

Рисунок.2. - Функциональный состав основных программных средств
OS-9
pipeman - организующий очередь поступающих команд;
ioman - выполняющий общее управление внешними устройствами;
scf - управляющий байтовым последовательным обменом (связь с терминалом и другими устройствами по последовательному каналу);
rbf - управляющий блочным обменом с прямым доступом памяти (связь с дисковой памятью);
sbf - управляющий блочным последовательным обменом (связь с накопителями на магнитных лентах и другими устройствами);
pcf - поддерживающий файловую DOS-систему (поставляется по требованию заказчика).
Сетевые и коммуникационные менеджеры обеспечивают работу OS-9 с различными сетями и обмен данными по каналам связи с наиболее распространенными стандартами протоколе обмена. Чаще всего из этой группы используются следующие менеджеры:
Х.25;
nfs, nfm, isp - обеспечивающие основные протоколы сетевого обмена; profiman - реализующий протокол обмена с шиной Profibus;
ism - реализующий обмен по сети цифровой связи стандарта ISDN;
spf - обеспечивающий пакетный обмен по стандартному протоколу
rtnfm - поддерживающий обмен по сети реального времени.
Для реализации графического интерфейса и работы с мультимедиа-
приложениями используются файловые менеджеры: gfm - графический менеджер реального времени;
mpfm - управляющий движущимися изображения;
mfm - обеспечивающий пользовательский интерфейс с мультимедиа; g-windows - система оконного графического интерфейса,
разработанная фирмой Gespac в виде файлового менеджера для OS-9.
Физический интерфейс OS-9 с разнообразными внешними устройствами обеспечивается большим набором драйверов, которые созданы как фирмой Microware Systems, так и многочисленными разработчиками аппаратуры, использующей эту операционную систему для конкретных приложений. Большинство драйверов, реализующих интерфейс со стандартными внешними устройствами, входят в пакет, из которого пользователь может выбрать необходимые средства для своего проекта.
В составе OS-9 имеется также пакет программ BSP для поддержки плат развития, который обеспечивает совместную работу OS-9 с целым рядом SBC, включая SBC типа MVME162, 172, 1603, 1604 фирмы Motorola. Используя BSP, OS-9 и какой-либо из этих SBC, разработчик может быстро сконфигурировать мощную целевую систему для своего конкретного приложения.
OS-9 содержит средства поддержки программирования, позволяющие проектировщику создавать прикладное программное обеспечение. Эти средства включают компиляторы Ultra C/C++, текстовый редактор EMACS, три вида отладчиков, в том числе символьные, а также разнообразные утилиты для организации контроля и сборки программных проектов. Кроме того, проектировщик может использовать большой набор совместимых с OS- 9 текстовых редакторов, компиляторов C/C++, Forth, Ada, Modula-2 и других языков, которые разработаны рядом других фирм.
Для удобства пользователя совместно с OS-9 поставляются набор средств программирования-отладки OS-9 Tool Kit, интегрированная среда разработки FasTrak. В состав OS-9 Tool Kit входят основные средства разработки программ, указанные выше.
Интегрированная среда разработки FasTrak предоставляет пользователю наиболее полный комплект средств программирования- отладки. FasTrak имеет две версии: для функционирования в среде Windows на инструментальных компьютерах IBM-PC; для функционирования с системой UNIX на рабочих станциях SUN, HP, IBM RS/6000. Часть программных средств FasTrak инсталлируется на инструментальном компьютере, а часть - на целевой системе пользователя. Интерфейс инст-
рументального компьютера и целевой системы осуществляется файловым менеджером isp, который реализует протокол TCP/IP, обеспечивая связь по последовательному каналу или по сети Ethernet.
Среда FasTrak интегрирует все средства, необходимые для поддержки проектирования-отладки целевых систем. Версия FasTrak для IBM-PC содержит высокоэффективный текстовый редактор Premia's Codewright, который имеет средства перекодировки клавиатуры, обеспечивающие пользователю возможность вести редактирование в удобном для него формате. Версия для UNIX-станций позволяет использовать любой редактор, функционирующий с ОС UNIX. В состав FasTrak входят компиляторы Ultra C/C++, возможно также использование других компиляторов, например GNU C/C++ фирмы Cygnus Support. Отладчики FasTrak обеспечивают два режима отладки: пользовательский для создания прикладных программ, и сис- темный, который выполняет обслуживание прерываний, системных вызовов и обращение к ядру РВ. Реализуется также отладка мультипроцессорных систем. При выполнении контрольных прогонов рабочей программы программа-профилировщик дает информацию о количестве обращений к различным программным модулям и времени их выполнения. В составе среды FasTrak имеются средства интерфейса с логическими анализаторами фирмы Hewlett-Packard и схемными эмуляторами фирм
Hewlett-Packard, EST, Applied Microsystems, Orion. Широкий набор функциональных возможностей делает среду FasTrak эффективным средством создания программного обеспечения для разнообразных микропроцессорных и микроконтроллерных систем.
Модульная структура ОСРВ OS-9 позволяет легко конфигурировать ее в соответствии с потребностями заказчиков. В настоящее время фирма Microware Systems поставляет ряд системных пакетов, ориентированных на различные сферы приложения:
Wireless OS-9 - для разработки устройств беспроводной связи: сотовых телефонов, пейджеров, портативных цифровых ассистентов (PDA);
Internet OS-9 - для разработки устройств с доступом к сети Интернет;
Digital Audio/Video Interactive Decoder (DAVID) OS-9 - для разработки распределенных систем цифрового интерактивного телевидения.
Таким образом, ОСРВ OS-9 позволяет удовлетворить запросы широкого круга разработчиков, создающих системы реального времени и программное обеспечение для них. Полную информацию об этой ОСРВ и возможностях ее использования для конкретного применения можно получить в сети Интернет по адресам http:/www.microware.com или http:/www.rtsoft.ru.
2. Операционная система VxWorks
VxWorks относится к классу систем "жесткого" РВ. Эта ОСРВ предназначена для работы с семействами М680хО, М683хх, МРС6хх, МРС5хх, MPCSxx, MCF52xx, а также с микропроцессорами других производителей: Intel 486, Pentium, SPARC, MIPS, DEC Alpha, HP PA-RISC. В качестве инструментального компьютера используются IBM-PC,
работающие в среде Windows, или рабочие станции SUN, HP, DEC, IBM RS/6000 с операционными системами типа UNIX. При выполнении отладки VxWorks, которая инсталлируется на отлаживаемой целевой системе, работает совместно с интегрированной средой разработки Tornado, функционирующей на инструментальном компьютере (рис. 3).
VxWorks имеет иерархическую организацию, нижним уровнем которой служит микроядро РВ, выполняющее базовые функции планирования задач и управления их коммуникацией-синхронизацией. Все остальные функции - управление памятью, вводом-выводом, сетевым обменом и другие, реализуются дополнительными модулями. Микроядро с минимальным набором модулей занимает 20...40 Кбайт памяти. Для встроенных систем, имеющих жесткие ограничения на объем памяти, раз- работано редуцированное ядро Wind Stream, которое требует для работы всего 8 Кбайт ПЗУ и 2 Кбайт ОЗУ.
Для реализации графических приложений используется система графического интерфейса VX-Windows. В тех случаях, когда ограниченный объем памяти целевой системы не позволяет использовать VX-Windows, предлагается графическая библиотека RTGL, которая содержит базовые графические примитивы, наборы шрифтов и цветов, драйверы типовых устройств ввода и графических контроллеров. В состав VxWorks входят также различные средства поддержки разнообразных сетевых протоколов: Х.25, ISDN, ATM, SS7, Frame Relay и ряда других.
Специальные средства отладки в реальном масштабе времени обеспечивают трассировку заданных событий и их накопление в буферной памяти для последующего анализа. Трассировку системных событий выполняет динамический анализатор WindView, который работает аналогично логическому анализатору, отображая на экране временные диаграммы переключения задач, записи в очередь сообщений, установки программных светофоров и другие процессы. Монитор данных StethoScope позволяет анализировать динамическое изменение пользовательских и сис- темных переменных, включая в себя также профилировщик процедур.
В составе VxWorks имеется пакет программ BSP для постановки данной ОСРВ на ряд плат развития, включая SBC фирмы Motorola, что позволяет конфигурировать таким образом целевую систему для конкретного приложения. Для комплексной отладки целевых систем VxWorks обеспечивает интерфейс со схемными эмуляторами (например, типа 64700 фирмы Hewlett-Packard) и эмуляторами ПЗУ (например, Net ROM фирмы XLNT Designs).

Инструментальный компьютер Целевая система
Рисунок 3. Аппаратно-программный комплекс программирования- отладки систем на базе ОСРВ VxWorks и интегрированной среды Tornado
Симулятор VxSim позволяет моделировать на инструментальном компьютере многозадачную среду VxWorks и интерфейс с целевой системой. Он позволяет разрабатывать и отлаживать программное обеспечение без подключения целевой системы. Среда VxWorks обеспечивает также возможности программирования мультипроцессорных систем.
Для поддержки программирования предлагается интегрированная среда разработки Tornado, в состав которой входит VxWorks 5.3 - ядро РВ и системные библиотеки, средства программирования C/C++ Toolkit, высокоуровневый отладчик CrossWind и ряд других средств. Пакет C/C++ Toolkit содержит компиляторы GNU C/C++ фирмы Cygnus Support. Отладчик CrossWind является расширенной версией отладчика GDB фирмы Cygnus Support. Он имеет графический пользовательский интерфейс и поддерживает отладку как на прикладном, так и на системном уровне. Дополнительные средства среды Tornado обеспечивают управление процессом отладки, визуализацию состояния целевой системы, другие сервисные функции.
Tornado может использоваться совместно с VX-Windows, WindView, StethoScope, VxSim и рядом других средств из состава VxWorks.
Характерной особенностью среды Tornado является ее открытая архитектура, которая позволяет пользователю подключать собственные специализированные инструментальные средства и расширять возможности стандартных. Открытость реализована с помощью прикладных программных интерфейсов API, которые дают возможность различным программным продуктам обмениваться между собой данными на инструментальном компьютере и взаимодействовать с VxWorks, установленной на целевой системе.
ОСРВ VxWorks вместе с интегрированной средой Tornado является мощным средством реализации целевых систем, работающих в условиях жестких ограничений на объем используемой памяти и время отклика на внешние события. Подробную информацию по VxWorks и сопутствующим
программным продуктам можно получить в сети Интернет по адресу http:/www. wrs.com.
Лекция 3.7. Сетевая операционная система реального времени
1. Принципы построения СРВ QNX.
2. Архитектура системы QNX.
3. Основные механизмы QNX для организации распределенных
вычислений.
1. Принципы построения СРВ QNX
Операционная система QNX является мощной операционной системой, позволяющей проектировать сложные программные системы, работающие в реальном времени как на одном компьютере, так и в локальной вычислительной сети. Встроенные средства операционной системы QNX обеспечивают поддержку многозадачного режима на одном компьютере и взаимодействие параллельно выполняемых задач на разных компьютерах, работающих в среде локальной вычислительной сети. Основным языком программирования в системе является язык С. Основная операционная среда соответствует стандартам POSIX-интерфейса. Это позволяет с небольшими доработками перенести необходимое накопленное программное обеспечение в среду операционной системы QNX для организации их работы в среде распределенной обработки.
ОС QNX является сетевой, мультизадачной, многопользовательской (многотерминальной) и масштабируемой. С точки зрения пользовательского интерфейса и API она похожа на UNIX. Однако QNX - это не версия UNIX. QNX была разработана канадской фирмой QNX Software Systems Limited в 1989 году по заказу Министерства обороны США. Причем эта система построена на совершенно других архитектурных принципах, отличных от принципов, использованных при создании ОС UNIX.
QNX была первой коммерческой ОС, построенной на принципах микроядра и обмена сообщениями. Система реализована в виде совокупности независимых (но взаимодействующих через обмен сообщениями) процессов различного уровня (менеджеры и драйверы), каждый из которых реализует определенный вид сервиса. Эти идеи позволили добиться нескольких важнейших преимуществ:
Предсказуемость, означающая ее применимость к задачам жесткого реального времени. QNX является операционной системой, которая дает полную гарантию в том, что процесс с наивысшим приоритетом начнет выполняться практически немедленно, и что критическое событие (например, сигнал тревоги) никогда не будет потеряно. Ни одна версия UNIX не может достичь подобного качества, поскольку код ядра слишком велик. Любой системный вызов из обработчика прерывания в UNIX может привести к непредсказуемой задержке (то же самое касается Windows NT).
Масштабируемость и эффективность, достигаемые оптимальным использованием ресурсов и означающие ее применимость для встроенных систем. Драйверы и менеджеры можно запускать и удалять (кроме файловой системы) динамически, из командной строки. Вы можете иметь только тот сервис, который вам реально нужен, причем это не требует серьезных усилий и не порождает проблем.
Расширяемость и надежность одновременно, поскольку написанный вами драйвер не нужно компилировать в ядро. Менеджеры ресурсов (сервис логического уровня) работают в кольце защиты 3, и возможно добавлять свои, не опасаясь за систему. Драйверы работают в кольце с уровнем привилегий 1 и могут вызвать проблемы, но не фатального характера. Кроме того, их достаточно просто писать и отлаживать.
Быстрый сетевой протокол FLEET, прозрачный для обмена сообщениями, автоматически обеспечивающий отказоустойчивость, балансирование нагрузки и маршрутизацию между альтернативными путями доступа.
Компактная графическая подсистема Photon, построенная на тех же принципах модульности, что и сама ОС, позволяет получить полнофункциональный графический интерфейс пользователя GUI, работающий вместе с POSIX-совместимой ОС всего в 4 Мбайт памяти, начиная с i80386 процессора.
Основными принципами, которые являются обязательными при реализации и создании ОСРВ являются:
Первым обязательным требованием к архитектуре ОСРВ является многозадачность. Очевидно, что варианты с псевдомногозадачностью (а точнее - не вытесняющая многозадачность) типа MS Windows 3.x или Novell NetWare неприемлемы, поскольку они допускают возможность блокировки или даже полного развала системы одним неправильно работающим процессом. Для предотвращения блокировок ОСРВ должна использовать квантование времени (то есть вытесняющую многозадачность).
Вторая проблема (организация надежных вычислений) может быть эффективно решена при полном использовании возможностей процессоров Intel 80386 и старше, что предполагает работу ОС в 32-разрядном режиме процессора. Для эффективного обслуживания прерываний ОС должна использовать алгоритм диспетчеризации, обеспечивающий вытесняющее планирование, основанное на приоритетах. Крайне желательны эффективная поддержка сетевых коммуникаций и наличие развитых механизмов взаимодействия между процессами, поскольку реальные технологические системы обычно управляются целым комплексом компьютеров и/или контроллеров. Важно, чтобы ОС поддерживала множественные потоки управления (не только мультипрограммный, но и мультизадачный режимы), а также симметричную мультипроцессорность.
При соблюдении всех перечисленных выше условий, ОС должна быть способна работать на ограниченных аппаратных ресурсах, поскольку одна из ее основных областей применения - это встроенные системы. К сожалению,
данное условие обычно реализуется путем урезания стандартных сервисных средств.
2. Архитектура системы QNX
QNX - это ОС реального времени, позволяющая эффективно организовать распределенные вычисления. В системе реализована концепция связи между задачами на основе сообщений, посылаемых oт одной задачи к другой, причем задачи эти могут находиться как на одном и том же компьютере, так и на удаленных, но связанных локальной вычислительной сетью. Реальное время и концепция связи между процессами в виде сообщений оказывают решающее влияние на разрабатываемое для QNX программное обеспечение и на программиста, стремящегося с максимальной выгодой использовать преимущества системы.
Микроядро имеет объем и несколько десятков килобайт (в одной из версий - 10 Кбайт, в другой - менее 32 Кбайт), то есть это одно из самых маленьких ядер среди всех существующих операционных систем. В этом объеме помещаются:
. механизм передачи сообщений между процессами (IPC);
. редиректор прерываний;
. блок планирования выполнением задач;
. сетевой интерфейс для перенаправления сообщений (менеджер Net).
Механизм передачи межпроцессорных сообщений занимается пересылкой сообщений между процессами и является одной из важнейших частей операционной системы, так как все общения между процессами, в том числе и системными, происходит через сообщения. Сообщение в QNX - это последовательность байтов произвольной длины (0-65 535 байтов) произвольного формата. Протокол обмена сообщениями выглядит таким образом. Например, задача блокируется для ожидания сообщения. Другая же задача посылает первой сообщение и при этом блокируется сама, ожидая ответа. Первая задача разблокируется, обрабатывает сообщение и отвечает, разблокируя при этом вторую задачу.
Сообщения и ответы, пересылаемые между процессами при их взаимодействии, находятся в теле отправляющего их процесса до того момента, когда они могут быть приняты. Это значит, что, с одной стороны, уменьшается вероятность повреждения сообщения в процессе передачи, а с другой - уменьшается объем оперативной памяти, необходимый для работы ядра. Кроме того, уменьшается число пересылок из памяти в память, что разгружает процессор. Особенностью процесса передачи сообщений является то, что в сети, состоящей из нескольких компьютеров под управлением QNX, сообщения могут прозрачно передаваться процессам, выполняющимся на любом из узлов. Определены в QNX еще и два дополнительных метода передачи сообщений - метод представителей (Proxy) и метод сигналов (Signal).
Представители используются в случаях, когда процесс должен передать сообщение, но не должен при этом блокироваться на передачу. В таком случае вызывается функция qnx_proxy_attach( ) и создается
представитель. Он накапливает в себе сообщения, которые должны быть доставлены другим процессам. Любой процесс, знающий идентификатор представителя, может вызвать функцию Trig-ger( ), после чего будет доставлено первое в очереди сообщение. Функция Trigger( ) может вызываться несколько раз, и каждый раз представитель будет доставлять следующее сообщение. При этом представитель содержит буфер, в котором может храниться до 65 535 сообщений.
Как известно, сигналы уже давно используются и ОС UNIX. Система QNX поддерживает множество сигналов, совместимых с POSIX, большое количество сигналов, традиционно использовавшихся в UNIX (поддержка этих сигналов реализована для совместимости с переносимыми приложениями, и ни один из системных процессов QNX их не генерирует), а также несколько сигналов, специфичных для самой QNX. По умолчанию любой сигнал, полученный процессом, приводит к завершению процесса (кроме нескольких сигналов, которые по умолчанию игнорируются). Но процесс с приоритетом уровня «superuser» может защититься от нежелательных сигналов. В любом случае процесс может содержать об- работчик для каждого возможного сигнала. Сигналы удобно рассматривать как разновидность программных прерываний.
Редиректор прерываний является частью ядра и занимается перенаправлением аппаратных прерываний в связанные с ними процессы. Благодаря такому подходу возникает один побочный эффект - с аппаратной частью компьютера работает ядро, оно перенаправляет прерывания процессам - обработчикам прерываний. Обработчики прерываний обычно встроены в процессы, хотя каждый из них исполняется асинхронно с процессом, в который он встроен. Обработчик исполнялся в контексте процесса, и имеет доступ ко всем глобальным переменным процесса. При работе обработчика прерываний прерывания paзрешены, но обработчик приостанавливается только в том случае, если произошло более высоко- приоритетное прерывание. Если это позволяется аппаратной частью, к одному прерыванию может быть подключено несколько обработчиков, и каждый из них получит управление при возникновении прерывания.
Этот механизм позволяет пользователю избежать работы с аппаратным обеспечением напрямую и тем самым избегать конфликтов между различными процессами, работающими с одним и тем же устройством. Для обработки сигналов от внешних устройств, чрезвычайно важно минимизировать время между возникновением события и началом непосредственной его обработки. Этот фактор является существенным в любой области применения, от работы терминальных устройств до обработки высокочастотных сигналов.
Блок планирования выполнения задач (диспетчер задач) занимается обеспечением многозадачности. В этой части ОС QNX предоставляет разработчику огромный простоp для выбора той методики выделения ресурсов процессора задаче, которая обеспечит наиболее подходящие условия для критических приложений или обеспечит такие
условия для некритических приложений, что они выполнятся за разумное время, не мешая работе критических приложений.
К выполнению своих функций как диспетчера ядро приступает в следующих случаях:
. какой-либо процесс вышел из блокированного состояния;
. истек квант времени для процесса, владеющего CPU;
. работающий процесс прерван каким-либо событием.
Диспетчер выбирает процесс для запуска среди неблокированных процессов в порядке значении их приоритетов, которые располагаются в диапазоне oт 0 (наименьший) до 31 (наибольший). Обслуживание каждого из процессов зависит от метода диспетчеризации, с которым он работает (уровень приоритета и метод диспетчеризации могут динамически меняться во время работы). В QNX существуют три метода диспетчеризации: FIFO (первым пришел - первым обслужен), round-robin (процессу выделяется определенный квант времени для работы) и адаптивный, который является наиболее используемым.
Первый наиболее близок к кооперативной многозадачности. То есть процесс выполняется до тех пор, пока он не перейдет в состояние ожидания сообщения, состояние ожидания ответа на сообщение или не отдаст управление ядру. При переходе в одно из таких состояний процесс помещается последним в очередь процессов с таким же уровнем приоритета, а управление передается процессу с наибольшим приоритетом.
Во втором варианте все происходит так же, как и в предыдущем, с той разницей, что период, в течение которого процесс может работать без перерыва, ограничивается неким квантом времени.
Процесс, работающий с адаптивным методом, в QNX ведет себя следующим образом:
1. Когда процесс полностью использовал выделенный ему квант времени, его приоритет снижается на 1, если в системе есть процессы с тем же уровнем приоритета, готовые к исполнению.
2. Если процесс с пониженным приоритетом остается не обслуженным в течение секунды, его приоритет увеличивается на 1.
Если процесс блокируется, ему возвращается оригинальное значение приоритета.
По умолчанию процессы запускаются в режиме адаптивной многозадачности. В этом же режиме работают все системные утилиты QNX. Процессы, работающие в разных режимах многозадачности, могут одновременно находиться в памяти и исполняться. Важный элемент реализации многозадачности — это приоритет процесса. Обычно приоритет процесса устанавливается при его запуске. Но есть дополнительная возможность, называемая «вызываемый клиентом приоритет». Как правило, она реализуется для серверных процессов (исполняющих запросы на какое- либо обслуживание). При этом приоритет процесса-сервера устанавливается только на время обработки запроса и становится равным приоритету процесса-клиента.
Сетевой интерфейс в системе QNX является неотъемлемой частью ядра. Он взаимодействует с сетевым адаптером через сетевой драйвер, но базовые сетевые сервисы реализованы на уровне ядра. При этом передача сообщения процессу, находящемуся на другом компьютере, ничем не отличается с точки зрения приложения от передачи сообщения процессу, выполняющемуся на том же компьютере. Благодаря такой организации сеть превращается в однородную вычислительную среду. При этом для большинства приложений не имеет значения, с какого компьютера они были запущены, на каком исполняются и куда поступают результаты их работы. Такое решение принципиально отличает QNX от остальных ОС, которые тоже имеют все необходимые средства для работы в сети, и делает системы, работающие под ее управлением, по-настоящему распределенными. Все сервисы QNX, не реализованные непосредственно в ядре, работают как стандартные процессы в полном соответствии с основными концепциями микроядерной архитектуры. С точки зрения операционной системы системные процессы ничем не отличаются от всех остальных, как и драйверы устройств. Единственное, что нужно сделать, написав новый драйвер устройства в QNX, чтобы он стал частью операционной системы, - это изменить конфигурационный файл системы так, чтобы драйвер запускался при загрузке.
3. Основные механизмы QNX для организации распределенных вычислений QNX является сетевой операционной системой и позволяет организовать эффективные распределенные вычисления. Для организации сети на каждой машине, называемой узлом, помимо ядра и менеджера процессов должен быть запущен менеджер Net. Менеджер Net не зависит от аппаратной реализации сети. Данная аппаратная независимость обеспечивается за счет использования сетевых драйверов. В QNX имеются драйверы для различных сетей, например Ethernet, Arcnet, Token Ring. Кроме этого, имеется возможность организации сети через последовательный канал или модем.
В QNX четвертой версии полностью реализовано встроенное сетевое взаимодействие «точка-точка». Например, находясь на машине А, можно скопировать файл с гибкого диска, подключенного к машине В, на жесткий диск, подключенный к машине С. По существу, сеть из машин QNX действует как один мощный компьютер. Любые ресурсы (модемы, диски, принтеры) могут быть добавлены к системе простым их подключением к любой машине в сети. QNX поддерживает одновременную работу в сетях Ethernet, Arcnet, Serial и Token Ring, обеспечивает более чем один- единственный путь для коммуникации, а также балансировку нагрузки в сетях. Если кабель или сетевая плата выходит из строя таким образом, что связь через эту сеть прекращается, то система будет автоматически перена- правлять данные через другую сеть. Это происходит в режиме «on-line», предоставляя пользователю автоматическую сетевую избыточность и увеличивая скорость коммуникаций во всей системе.
Каждому узлу в сети соответствует уникальный целочисленный идентификатор - логический номер узла. Любой поток в сети QNX имеет прозрачный доступ (при наличии достаточных привилегий) ко всем ресурсам сети, то же самое относится и к взаимодействию потоков. Для взаимодействия потоков, находящихся на разных узлах сети, используются те же самые вызовы ядра, что и для потоков, выполняемых на одном узле. В том случае, если потоки находятся на разных узлах сети, ядро переадресует запрос менеджеру сети. Для организации обмена в сети используется надежный и эффективный протокол транспортного уровня FLEET. Каждый из узлов может принадлежать одновременно нескольким QNX-сетям. В том случае если сетевое взаимодействие может быть реализовано несколькими путями, для передачи выбирается незагруженная и более скоростная сеть.
Сетевое взаимодействие является узким местом в большинстве операционных систем и обычно создает значительные проблемы для систем реального времени. Для того чтобы обойти это препятствие, разработчики QNX создали собственную специальную сетевую технологию FLEET и соответствующий протокол транспортного уровня FTL (FLEET transport laуег). Этот протокол не базируется ни на одном из распространенных сетевых протоколов типа IPX или NetBios и обладает рядом качеств, которые делают его уникальным. Основные его качества зашифрованы в аббревиатуре FLEET, которая расшифровывается следующим образом.
Благодаря этой технологии сеть компьютеров с QNX фактически можно представлять как один виртуальный суперкомпьютер. Все ресурсы любого из узлов сети автоматически доступны другим. Это значит, что любая программа может быть запущена на любом узле, при этом ее входные и выходные потоки могут быть направлены на любое устройство на любых других узлах.
Например, утилита make в QNX автоматически распараллеливает компиляцию пакетов из нескольких модулей на все доступные узлы сети, а затем собирает исполняемый модуль по мере завершений компиляции на узлах. Специальный драйвер, входящий в комплект поставки, позволяет использовать для сетевого взаимодействия любое устройство, с которым может быть ассоциирован файловый дескриптор, например последовательный порт, что открывает возможность для создания глобальных сетей.
Достигаются все эти удобства за счет того, что поддержка сети частично обеспечивается и микроядром (специальный код в его составе позволяет QNX фактически объединять все микроядра в сети в одно ядро). Разумеется, за такие возможности приходится платить тем, что мы не можем получить драйвер для какой-либо сетевой платы от кого-либо еще, кроме фирмы QSSL, то есть использоваться может только то оборудование, которое уже поддерживается. Однако ассортимент такого оборудования достаточно широк и периодически пополняется новейшими устройствами.
|
Fault-Tolerant Networking |
QNX может одновременно использовать несколько физических сетей. При выходе из строя любой из них данные будут автоматически перенаправлены «на лету» через другую сеть |
|
Load- Balancing on the Fly |
При наличии нескольких физически соединений QNX автоматически распараллеливает передачу пакетов по соответствующим сетям |
|
Efficient. Per- formance |
Специальные драйверы, разрабатываемые фирмой QSSL для широкого спектра оборудования, позволяют с максимальной эффективностью использовать сетевое оборудование |
|
Extensable Ar- chitecture |
Любые новые типы сетей могут быть поддержаны путем добавления соответствующих драйверов |
|
Transparent Distributed Processing |
Благодаря отсутствию разницы между передачей сообщений в пределах одного узла и между узлами нет необходимости вносить какие-либо изменения в приложении для того, чтобы они могли взаимодействовать через сеть |
Когда ядро получает запрос на передачу данных процессу, находящемуся на удаленном узле, оно переадресовывает этот запрос менеджеру Net, в подчинении которого находятся драйверы всех сетевых карт. Имея перед собой полную картину состояния всего сетевого оборудования, менеджер Net может отслеживать состояние каждой сети и динамически перераспределять нагрузку между ними. В случае, когда одна из сетей выходит из строя, информационный поток автоматически перенаправляется в другую доступную сеть, что важно при построении вы- соконадежных систем. Кроме поддержки своего собственного протокола, Net обеспечивает передачу пакетов TCP/IP, SMB и многих других, используя то же сетевое оборудование. Производительность QNX в сети приближается к производительности аппаратного обеспечения.
При проектировании системы реального времени, как правило, необходимо обеспечить одновременное выполнение нескольких приложений. В QNX/Neutrino параллельность выполнения достигается за счет использования потоковой модели POSIX, в которой процессы в системе представляются в виде совокупности потоков. Поток является минимальной единицей выполнения и диспетчеризации для ядра Neutrino, процесс определяет адресное пространство для потоков. Каждый процесс состоит минимум из одного потока. QNX предоставляет богатый набор функций для синхронизации потоков. В отличие от потоков само ядро не подлежит диспетчеризации. Код ядра исполняется только в том случае, когда какой- нибудь поток вызывает функцию ядра или при обработке аппаратного прерывания.
QNX базируется на концепции передачи сообщений. Передачу сообщений, а также их диспетчеризацию осуществляет ядро системы. Кроме
того, ядро управляет временными прерываниями. Выполнение остальных функций обеспечивается задачами-администраторами. Программа, желающая создать задачу, посылает сообщение администратору задач (модуль task) и блокируется для ожидания ответа. Если новая задача должна выполняться одновременно с порождающей ее задачей, администратор задач task создает ее и, отвечая, выдает порождающей задаче идентификатор (id) созданной задачи. В противном случае никакого сообщения не посылается до тех пор, пока новая задача не закончится сама по себе. В этом случае в ответе администратора задач будут содержаться конечные характеристики закончившейся задачи.
Сообщения отличаются количеством данных, которые передаются от одной задачи точно к другой задаче. Данные копируются из адресного пространства первой задачи в адресное пространство второй, и выполнение первой задачи приостанавливается до тех пор, пока вторая задача не вернет ответное сообщение. В действительности обе задачи кратковременно взаимодействуют во время выполнения передачи. Ничто, кроме длины сообщения (максимальная длина 65 535 байт), не заботит QNX при передаче сообщения. Существует несколько протоколов, которые могут быть использованы для сообщений.
Основные операции над сообщениями - это послать, получить и ответить, а также несколько их вариантов для обработки специальных ситуаций. Получатель всегда идентифицируется своим идентификатором задачи, хотя существуют способы ассоциировать имена с идентификатором задачи. Наиболее интересные варианты операций включают в себя возможность получать (копировать) только первую часть сообщения, а затем получать оставшуюся часть такими кусками, какие потребуются. Это может быть использовано для того, чтобы сначала узнать длину сообщения, а затем динамически распределить принимающий буфер. Если необходимо задержать ответное сообщение до тех пор, пока не будет получено и обработано другое сообщение, то чтение первых нескольких байт дает вам компактный «обработчик», через который позже можно получить доступ ко всему сообщению. Таким образом, ваша задача предохраняется от того, чтобы хранить в себе большое количество буферов.
Другие функции позволяют программе получать сообщения только тогда, когда она уже ожидает их приема, а не блокироваться до тех пор, пока, не прибудет сообщение транслировать сообщение к другой задаче без изменения идентификатора передатчика. Задача, которая транслировала сообщение, в транзакции невидима.
Кроме этого, QNX обеспечивает объединение сообщений в структуру данных, называемую очередью. Очередь - это область данных в третьей, отдельной задаче, которая временно принимает передаваемое сообщение и немедленно отвечает передатчику. В отличие от стандартной передачи сообщений, передатчик немедленно освобождается для того, чтобы продолжить свою работу. Задача администратора очереди хранить в себе сообщение до тех пор, пока приемник не будет готов прочитать его. Это он
делает путем запроса сообщения у администратора очереди. Любое количество сообщений (ограничено только возможностью памяти) может храниться в очереди. Они хранятся и передаются в том порядке, в котором были приняты. Может быть создано любое количество очередей. Каждая оче- редь идентифицируется своим именем.
Помимо сообщений и очередей в QNX для взаимодействия задач и организации распределенных вычислений имеются так называемые порты, которые позволяют формировать сигнал одного конкретного условия, и механизм исключений.
Порт подобен флагу, известному всем задачам на одном и том же узле (но не на различных узлax). Он имеет два состояния, которые могут трактоваться как «присоединить» и «освободить», хотя пользователь может использовать свою интерпретацию; например, «занят» и «доступен». Порты используются для быстрой простой синхронизации между задачей и обработчиком прерываний устройства. Они нумеруются от нуля до максимума 32 (на некоторых типах узлов возможно и больше). Первые 20 номеров зарезервированы для использования операционной системой.
С портом могут быть выполнены три операции:
- присоединить порт;
- отсоединить порт;
- послать сигнал в порт.
Одновременно к порту может быть присоединена только одна задача Если другая задача попытается «отсоединиться» от того же самого порта, то произойдет отказ при вызове функции, и управление вернется к задаче, которая в настоящий момент присоединена к этому порту. Это самый быстрый способ обнаружить идентификатор другой задачи, подразумевая, что задачи могут договориться использовать один номер порта. Все рассматриваемые задачи должны находиться на одном и том же узле. При работе нескольких узлов специальные функции обеспечивают большую гибкость и эффективность.
Любая задача может посылать сигнал в любой порт независимо от того, была ли она присоединена к нему или нет (предпочтительно, чтобы не была присоединена). Сигнал подобен не блокирующей передаче пустого сообщения. То есть передатчик не приостанавливается, а приемник не получает какие-либо данные, он только отмечает, что конкретный порт изменил свое состояние.
Задача, присоединенная к порту, может ожидать прибытия сигнала или может периодически читать порт. QNX хранит информацию о сигналах, передаваемых в каждый порт, и уменьшает счетчик после каждой операции
«приема» сигнала («чтение» возвращает счетчик и устанавливает его в ноль). Сигналы всегда принимаются перед сообщениями, давая им тем самым больший приоритет над сообщениями. В этом смысле сигналы часто используются обработчиками прерываний для того, чтобы оповестить задачу о внешних (аппаратных) событиях (действительно, обработчики прерываний
не имеют возможности посылать сообщения и должны использовать сигналы).
В отличие oт описанных выше методов, которые строго синхронизируются, «исключения» обеспечивают асинхронное взаимодействие. То есть исключение может прервать нормальное выполнение потока задачи. Они, таким образом, являются аварийными событиями. QNX резервирует для себя 16 исключений для того, чтобы оповещать задачи о прерывании с клавиатуры, нарушении памяти и подобных необычных ситуациях. Остальные 16 исключений могут быть определены и использованы прикладными задачами.
Системная функция может быть вызвана для того, чтобы позволить задаче управлять своей собственной обработкой исключений, выполняя свою собственную внутреннюю функцию во время возникновения исключения.
Функция исключения задачи вызывается асинхронно операционной системой, а не самой задачей. Вследствие этого исключения могут иметь сильнодействующее побочное влияние на операции (например, передачу сообщений), которые выполняются в это же время. Обработчики исключений должны быть написаны очень аккуратно.
Одна задача может установить одно или несколько исключений на другой задачей. Они могут быть комбинацией системных исключений (определенных выше) и исключений, определяемых приложениями, что обеспечивает другие возможности для межзадачного взаимодействия.
Благодаря такому свойству QNX, как возможность обмена посланиями между задачами и узлами сети, программы не заботятся о конкретном размещении ресурсов в сети. Это свойство придает системе необычную гибкость. Так, узлы могут произвольно добавляться и изыматься из системы, не затрагивая системные программы. QNX приобретает эту конфигурационную независимость благодаря применению концепции о
«виртуальных» задачах. У виртуальных задач непосредственный код и данные, будучи на одном из удаленных узлов, возникают и ведут себя так, как если бы они были локальными задачами какого-то узла со всеми атрибутами и привилегиями. Программа, посылающая сообщение в сети, ни- когда не посылает его точно. Сначала она открывает «виртуальную цепочку». Виртуальная цепочка включает все виртуальные задачи, связанные между собой. На обоих концах такой связи имеются буферы, которые позволяют хранить самое большое послание из тex, которые цепочка может нести в данном сеансе связи. Сетевой администратор помещает в эти буферы все сообщения для соединенных задач. Виртуальная задача, таким образом, занимает всего лишь пространство, необходимое для буфера и входа в таблицу задач. Чтобы открыть связь, необходимо знать идентификатор узла и задачи, с которой устанавливается связь. Для этого необходимо знать идентификатор задачи администратора, ответственного за данную функцию, или глобальное имя сервера. Не раскрывая здесь подробно механизм обмена посланиями, добавим, что наша задача может вообще выполняться на другом узле, где имеется более совершенный процессор.
124
Лекция 4.1. Методы программирования в реальном времени.
1. Последовательное программирование и программирование задач реального времени
2. Среда программирования.
3. Структура программы реального времени.
4. Параллельное программирование, мультипрограммирование и мно- гозадачность.
1. Последовательное программирование и программирование задач реального времени
Программа представляет собой описание объектов - констант и пере- менных - и операций, совершаемых над ними. Таким образом, программа - это чистая информация. Ее можно записать на какой-либо носитель, напри- мер на бумагу или на дискету.
Программы можно создавать и анализировать на нескольких уровнях абстракции (детализации) с помощью соответствующих приемов формально- го описания переменных и операций, выполняемых на каждом уровне. На самом нижнем уровне используются непосредственное описание - для каж- дой переменной указывается ее размер и адрес в памяти. На более высоких уровнях переменные имеют абстрактные имена, а операции сгруппированы в функции или процедуры. Программист, работающий на высоком уровне аб- стракции, не должен думать о том, по каким реальным адресам памяти хра- нятся переменные, и о машинных командах, генерируемых компилятором.
![]() Последовательное
программирование (sequential programming) является наиболее
распространенным способом написания программ. Понятие
"последовательное" подразумевает, что операторы программы выполняются
в известной последовательности один за другим. Целью последовательной программы
является преобразование входных данных, заданных в определенной форме, в
выходные данные, имеющие другую форму, в соответствии с некоторым алгоритмом -
методом решения (рис. 1).
Последовательное
программирование (sequential programming) является наиболее
распространенным способом написания программ. Понятие
"последовательное" подразумевает, что операторы программы выполняются
в известной последовательности один за другим. Целью последовательной программы
является преобразование входных данных, заданных в определенной форме, в
выходные данные, имеющие другую форму, в соответствии с некоторым алгоритмом -
методом решения (рис. 1).
Рисунок 1. - Обработка данных последовательной программой Таким образом, последовательная программа работает как фильтр для
исходных данных. Ее результат и характеристики полностью определяются входными данными и алгоритмом их обработки, при этом временные показа- тели играют, как правило, второстепенную роль. На результат не влияют ни инструментальные (язык программирования), ни аппаратные (быстродейст- вие ЦП) средства: от первых зависят усилия и время, затраченные на разра-
ботку и характеристики исполняемого кода, а от вторых - скорость выполне- ния программы, но в любом случае выходные данные будут одинаковыми.
Программирование в реальном времени (real-time programming) от- личается от последовательного программирования - разработчик программы должен постоянно иметь в виду среду, в которой работает программа, будь то контроллер микроволновой печи или устройство управления манипулятором робота. В системах реального времени внешние сигналы, как правило, требуют немедленной реакции процессора. В сущности, одной из наиболее важных особенностей систем реального времени является время реакции на входные сигналы, которое должно удовлетворять заданным ограничениям.
Специальные требования к программированию в реальном времени, в частности необходимость быстро реагировать на внешние запросы, нельзя адекватно реализовать с помощью обычных приемов последовательного про- граммирования. Насильственное последовательное расположение блоков программы, которые должны выполняться параллельно, приводит к неесте- ственной запутанности результирующего кода и вынуждает связывать между собой функции, которые, по сути, являются самостоятельными. В большин- стве случаев применение обычных приемов последовательного программирования не позволяет построить систему реального времени. В таких системах независимые программные модули или задачи должны быть активными одновременно, то есть работать параллельно, при этом каждая задача выполняет свои специфические функции. Такая техника известна под названием параллельного программирования (concurrent programming). В названии делается упор на взаимодействие между отдельными программными модулями. Параллельное исполнение может осуществляться на одной или нескольких ЭВМ, связанных распределенной сетью.
Программирование в реальном времени представляет собой раздел мультипрограммирования, который посвящен не только разработке взаимо- связанных параллельных процессов, но и временным характеристикам сис- темы, взаимодействующей с внешним миром.
Между программами реального времени и обычными последователь- ными программами, с четко определенными входом и выходом, имеются су- щественные различия. Перечислим отличия программ реального времени от последовательных программ:
1. Логика исполнения программы определяется внешними событиями.
2. Программа работает не только с данными, но и с сигналами, посту- пающими из внешнего мира, например, от датчиков.
3. Логика развития программы может явно зависеть от времени.
4. Жесткие временные ограничения. Невозможность вычислить результат за определенное время может оказаться такой же ошибкой, как и неверный результат ("правильный ответ, полученный поздно - это неверный ответ").
5. Результат выполнения программы зависит от общего состояния сис- темы, и его нельзя предсказать заранее.
6. Программа, как правило, работает в многозадачном режиме. Соот- ветственно, необходимы процедуры синхронизации и обмена данными меж- ду процессами.
7. Исполнение программы не заканчивается по исчерпании входных данных - она всегда ждет поступления новых данных.
Важность фактора времени не следует понимать как требование высо- кой скорости исполнения программы. Скорость исполнения программы ре- ального времени должна быть достаточной для того, чтобы в рамках уста- новленных ограничений реагировать на входные данные и сигналы и выраба- тывать соответствующие выходные величины. "Медленная" система реаль- ного времени может великолепно управлять медленным процессом. Поэтому скорость исполнения программ реального времени необходимо рассматри- вать относительно управляемого процесса или необходимой скорости. Ти- пичные приложения автоматизации производственных процессов требуют гарантированное время ответа порядка 1 мс, а в отдельных случаях - порядка
0.1 мс. При программировании в реальном времени особенно важными явля- ется эффективность и время реакции программ. Соответственно, разработка программ тесно связана с параметрами операционной системы, а в распреде- ленных системах - и локальной сети.
Особенности программирования в реальном времени требуют специ- альной техники и методов, не использующихся при последовательном про- граммировании, которые относятся к влиянию на исполнение программы внешней среды и временных параметров. Наиболее важными из них являют- ся перехват прерываний, обработка исключительных (нештатных) ситуаций и непосредственное использование функций операционной системы (вызовы ядра из прикладной программы, минуя стандартные средства). Помимо этого при программировании в реальном времени используются методика мульти- программирования и модель "клиент-сервер", поскольку отдельный процесс или поток обычно выполняют только некоторую самостоятельную часть всей задачи.
2. Среда программирования
Рассмотрим среду, в которой исполняются программы. Среда выпол- нения может варьироваться от мини-, персональных и одноплатных микрокомпьютеров и локальных шин, связанных с окружающей средой через аппаратные интерфейсы, до распределенных систем "клиент-сервер" с централизованными базами данных и доступом к системе высокопроизводительных графических рабочих станций. В комплексной системе управления промышленными и технологическими процессами может одновременно использоваться все перечисленное оборудование.
Разнообразие аппаратной среды отражается и в программном обеспе- чении, которое включает в себя как программы, записанные в ПЗУ, так и комплексные операционные системы, обеспечивающие разработку и испол- нение программ. В больших системах создание и исполнение программ осу- ществляются на одной и той же ЭВМ, а в некоторых случаях даже в одно время. Небольшие системы могут не иметь средств разработки, и программы
для них должны создаваться на более мощных ЭВМ с последующей загруз- кой в исполняющую систему. То же касается и микропрограмм, "зашитых" в ПЗУ оборудования производителем (firmware), - они разрабатываются на ЭВМ, отличной от той, на которой исполняются.
Первой задачей программиста является ознакомление с программной средой и доступными инструментальными средствами. Проблемы, с которы- ми приходится сталкиваться, начинаются, например, с типа представления данных в аппаратуре и программах, поскольку в одних системах применяется прямой, а в других - инверсный порядок хранения бит или байт в слове (младшие байты хранятся в старших адресах). Таких тонкостей очень много, и опытный программист знает, как отделить общую структуру данных и код от технических деталей реализации в конкретной аппаратной среде.
Важно как можно раньше выяснить функции, обеспечиваемые имею- щейся средой, и возможные альтернативы. Например, микропроцессор Mo- torola 68000 имеет в своем наборе команд инструкцию test_and_set, и поэто- му связь между задачами может осуществляться через общие области памя- ти. Операционная система VAX/VMS поддерживает почтовые ящики, и син- хронизировать процессы можно с помощью механизма передачи сообщений.
В UNIX и других операционных системах связь между процессами наиболее удобно осуществлять через каналы. При разработке программ для среды UNIX следует стремиться, с одной стороны, максимально эффективно использовать ее особенности, например стандартную обработку входных и выходных данных, а с другой - обеспечить переносимость между разными версиями UNIX.
Из-за того, что многозадачные системы и системы реального времени разрабатываются коллективами программистов, необходимо с самого начала добиваться ясности, какие методы и приемы используются.
Структурирование аппаратных и программных ресурсов, то есть при- своение адресов на шине и приоритетов прерываний для интерфейсных уст- ройств, имеет важное значение. Неправильный порядок распределения ре- сурсов может привести к тупиковым ситуациям. Определение аппаратных адресов и относительных приоритетов прерываний не зависит от разрабаты- ваемой программы. Поэтому оно должно быть произведено на ранней стадии и зафиксировано в техническом задании. Его не следует откладывать до мо- мента непосредственного кодирования, так как в этом случае неизбежны конфликты между программными модулями и возникает риск тупиковых си- туаций.
Правильным практическим решением является использование в про- грамме только логических имен для физического оборудования и его пара- метров и таблиц соответствия между ними и реальными физическими уст- ройствами. При этом изменение адреса шины или приоритета устройства требует не модификации, а в худшем случае только новой компиляции про- граммы. Разумно также использовать структурированное и организационно оформленное соглашение о наименовании системных ресурсов и программ-
ных переменных. То же относится и к наименованию и определению адресов удаленных устройств в распределенных системах.
Программы следует строить по принципам, применяемым в операци- онных системах, - на основе модульной и многоуровневой структуры, поскольку это существенно упрощает разработку сложных систем. Должна быть определена спецификация отдельных модулей, начиная с интерфейсов между аппаратными и программными компонентами системы. К основной информации об интерфейсах относится и структура сообщений, которыми будут обмениваться программные модули. Это не означает, что изменения в определении интерфейсов не могут вводиться после начала разработки про- граммы. Но чем позже они вносятся, тем больше затрат потребует изменение кода, тестирование и т. д. С другой стороны, следует быть готовым к тому, что некоторые изменения спецификаций все равно будут происходить в про- цессе разработки программы, поскольку продвижение в работе позволяет лучше увидеть проблему.
Следует принимать во внимание эффективность реализации функций операционной системы. Нельзя считать, что способ, которым в операционной системе реализованы те или иные услуги, дан раз и навсегда. Для проверки того, насколько хорошо удовлетворяются временные ограничения, желатель- но провести оценку, например с помощью эталонных тестовых программ. Если результаты тестов неприемлемы, то одним из решений может быть раз- работка программ, замещающих соответствующие стандартные модули опе- рационной системы. Такое решение требует очень осторожного и дифферен- цированного подхода, в частности замещение может выполняться не всегда, а только для определенных процессов.
3. Структура программы реального времени
Разработка программы реального времени начинается с анализа и опи- сания задачи. Функции системы делятся на простые части, с каждой из кото- рых связывается программный модуль.
Например, задачи для управления движением манипулятора робота можно организовать следующим образом:
– считать с диска описание траекторий;
– рассчитать следующее положение манипулятора (опорное значение);
– считать с помощью датчиков текущее положение;
– вычислить необходимый сигнал управления;
– выполнить управляющее действие;
– проверить, что опорное значение и текущее положение совпадают в пределах заданной точности;
– получить данные от оператора;
– остановить робота в случае нештатной ситуации (например, сигнал прерывания от аварийной кнопки).
Принципиальной особенностью программ реального времени является постоянная готовность и отсутствие условий нормального, а не аварийного завершения. Если программа не исполняется и не обрабатывает
данные, она остается в режиме ожидания прерывания/события или истечения некоторого интервала времени. Программы реального времени - это последовательный код, исполняющийся в бесконечном цикле.
В каком-то месте программы есть оператор, приостанавливающий ис- полнение до наступления внешнего события или истечения интервала време- ни. Обычно программа структурируется таким образом, что оператор end никогда не достигается
while true do (*бесконечный цикл*) begin (*процедура обработки*) wait event at #2,28 (*внешнее прерывание*) (*код обработки*) … end; (*процедура обработки*)
end. (*выход из программы; никогда не достигается*)
При разработке каждого программного модуля должны быть четко выделены области, в которых происходит обращение к защищенным ресурсам, - критические секции. Вход и выход из этих областей координируется каким-либо методом синхронизации или межпрограммных коммуникаций, например с помощью семафоров. В общем случае, если процесс находится в критической секции, можно считать, что данные, с которыми он работает, не изменяются каким-либо другим процессом. Прерывание исполнения процесса не должно оказывать влияния на защищенные ресурсы. Это снижает риск системных ошибок.
Аналогичные предосторожности необходимо соблюдать и для потоков, порождаемых как дочерние процессы главного процесса. Разные потоки могут использовать общие переменные породившего их процесса, и поэтому программист должен решить, защищать эти переменные или нет.
Для гарантии живучести программы нештатные ситуации, которые могут блокировать или аварийно завершить процесс, должны своевременно распознаваться и исправляться - если это возможно - в рамках самой про- граммы.
В системах реального времени различные процессы могут обращаться к общим подпрограммам. При простейшем решении эти подпрограммы свя- зываются с соответствующими модулями после компиляции. При этом в па- мяти хранится несколько копий одной подпрограммы.
При другом подходе в память загружается лишь одна копия подпро- граммы, но доступ к ней возможен из разных программ. Такие подпрограм- мы должны быть повторно входимыми - реентерабельными (reentrant), то есть допускать многократные вызовы и приостановку исполнения, которые не влияют друг на друга. Эти программы должны использовать только реги- стры процессора или память вызывающих процессов, то есть не иметь ло- кальных переменных. В результате реентерабельный модуль, разделяемый несколькими процессами, можно прервать в любое время и продолжить с другой точки программы, поскольку он работает со стеком вызвавшего его процесса. Таким образом, реентерабельная процедура может оказаться одно- временно в контексте нескольких различных процессов.
Эффективность исполнения является одним из наиболее важных пара- метров систем реального времени. Процессы должны выполняться быстро, и
часто приходится искать компромисс между ясностью и структурированностью программы и ее быстродействием. Жизненный опыт показывает, что если для достижения цели нужно чем-то пожертвовать, что обычно и делается. Не всегда возникает противоречие между структурностью и эффективностью, но если первое должно быть принесено в жертву второму, необходимо полностью документировать все принятые решения, иначе существенно осложняется дальнейшее сопровождение программы.
4. Параллельное программирование, мультипрограммирование и мно- гозадачность
Программирование в реальном времени требует одновременного ис- полнения нескольких процессов или задач на одной ЭВМ. Эти процессы ис- пользуют совместно ресурсы системы, но более или менее независимы друг от друга.
Мультипрограммирование (multiprogramming) или многозадачность (multitasking) есть способ одновременного исполнения нескольких процес- сов. Такого эффекта можно добиться как для одного, так и для нескольких процессоров: процессы исполняются либо на одном, либо на нескольких свя- занных между собой процессорах. В действительности многие современные вычислительные системы состоят из нескольких процессоров, связанных ме- жду собой либо сетью передачи данных, либо общей шиной.
Для записи параллельных процессов можно использовать следующую нотацию
х := 1; х := 2; х := 3;
write (x);
Исполнение команд между ключевыми словами cobegin и coend про- исходит параллельно (рис. 2). Пара операторных скобок cobegin-coend приводит к генерации потоков в рамках многозадачной системы. Оператор cobe-gin не накладывает условий на относительный порядок исполнения отдельных процессов, а оператор coend достигается только тогда, когда все процессы внутри блока завершены. Если бы исполнение было последовательным, то окончательное значение переменной х было бы равно
3. Для параллельных процессов конечный результат однозначно предсказать нельзя; задачи выполняются, по крайней мере, с внешней точки зрения, в случайной последовательности. Поэтому окончательное значение х в приведенном примере может быть как 1, так и 2 или 3.

Рисунок 2. - Граф очередности для операторов cobegin – coend
Иногда в технической литературе термин "параллельное программирование" используется как синоним мультипрограммирования. Однако эти понятия несколько различаются по смыслу. Параллельное программирование -это абстрактный процесс разработки программ, который потенциально может исполняться параллельно, вне зависимости от программно-аппаратной среды. Иными словами, предполагается, что каждая задача реализуется на собственном виртуальном процессоре. С другой стороны, мультипрограммирование представляет собой практический способ исполнения нескольких программ на одном центральном процессоре или в распределенной вычислительной системе. Параллельное программирование более трудоемко, чем последовательное, поскольку способность человека следить за развитием связанных процессов, и исследовать их взаимодействие, ограничена.
Программирование в реальном времени основано на параллельном программировании и включает в себя технику повышения эффективности и скорости исполнения программ - управление прерываниями, обработку ис- ключений и непосредственное использование ресурсов операционной систе- мы. Кроме того, программы реального времени требуют специальных мето- дов тестирования.
1. Требования к языкам программирования реального времени.
2. Языки разработки для систем реального времени.
1. Требования к языкам программирования реального времени Основными критериями при выборе языка для разработки приложения реального времени являются:
1. Получение наивысшей производительности приложения реального времени. Из этого требования вытекает, что язык должен быть компилируемого (как C, C++), а не интерпретируемого (как Java) типа, и для него должен существовать компилятор с высокой степенью оптимизации кода. Для современных процессоров качество компилятора особенно важно,
поскольку для них оптимизация может ускорять работу программы в несколько раз по сравнению с не оптимизированным вариантом, причем часто оптимизирующий компилятор может породить код более быстрый, чем написанный на ассемблере. Технологии оптимизации развиваются достаточно медленно и часто требуются годы на разработку высокоэффективного компилятора. Поэтому обычно для более старых и с более простой структурой языков имеются более качественные компиляторы, чем для достаточно молодых, и сложно устроенных языков.
2. Получение доступа к ресурсам оборудования либо посредством языковых конструкций, либо посредством имеющихся для выбранного языка библиотечных функций.
3. Возможность вызова процедур, написанных на другом языке, например, на языке ассемблера. Из этого требования вытекает, что последовательность вызова подпрограмм (механизм именования объектов, передачи аргументов и получения возвращаемого значения) должна быть документирована для выбранного языка.
4. Переносимость приложения, под которой обычно понимают, как возможность его скомпилировать другим компилятором, имеющимся
на той же платформе, так и возможность его скомпилировать на другой платформе и/или другой операционной системе.
5. Поддержка объектно-ориентированного подхода стала в послед- нее время необходимостью, зачастую выходя в списке требований на первое место. Это объясняет использование языка Java в ОСРВ.
Программирование в реальном времени требует специальных средств, которые не всегда встречаются в обычных языках последовательного про- граммирования. Язык или операционная система для программирования в реальном времени должны предоставлять следующие возможности:
– описание параллельных процессов;
– переключение процессов на основе динамических приоритетов, ко- торые могут изменяться, в том числе и прикладными процессами;
– синхронизацию процессов;
– обмен данными между процессами;
– функции, связанные с часами и таймером, абсолютное и относитель- ное время ожидания;
– прямой доступ к внешним аппаратным портам;
– обработку прерываний;
– обработку исключений.
Немногие языки обеспечивают все эти возможности. Большинство имеет лишь часть из них, хотя для определенных приложений этого оказы- вается достаточно. Некоторые компании разработали специальные языки для поддержки своих собственных аппаратных средств. Эти языки не пре- тендуют на универсальность и ориентированы скорее на конкретные ЭВМ и их интерфейсы. Обычно они базируются на существующих языках - FOR- TRAN, BASIC - с расширениями, включающими функции реального време- ни, о чем свидетельствуют их названия типа "Process BASIC" и "Real-time
FORTRAN". Некоторые языки не поддерживают программирования в реальном времени в строгом смысле, но они легко расширяются, например С и C++.
В 1970-е годы широкую поддержку получила концепция единого пе- реносимого многоцелевого языка программирования. В результате был раз- работан язык ADA. Его главная идея состоит в том, что среда программиро- вания, то есть язык, должна быть полностью отделена от аппаратных средств. Программист не должен сталкиваться с деталями машинного уровня, а работать только в терминах абстрактных структур и типов данных.
Опыт показал не реалистичность такого подхода. Универсальные, сильно типизированные языки программирования гарантируют определен- ный уровень надежности программы, но в то же время ограничивают гиб- кость. Быстрое развитие технических средств, предъявляет новые требова- ния, которые не могли быть предусмотрены в существующих языках, и мно- гие программисты чувствуют ограничения, используя, не самые современные языки программирования. Цена надежности языка - сложность и гро- моздкость, а генерируемый при этом компилятором код - избыточен и мало- эффективен. Открытый язык типа С, основанный на ограниченном количе- стве базовых идей, обладает большей гибкостью и предоставляет опытному программисту больше возможностей. Не существует наилучшего языка -для каждого приложения и среды необходимо подбирать свои средства и при этом учитывать квалификацию и предпочтения разработчиков.
2. Языки разработки для систем реального времени
Ассемблер. Обеспечивает получение наивысшей производительности, прямой доступ к оборудованию, возможность вызова любых процедур на других языках. Однако, приложения получаются не переносимыми, объект- но-ориентированный подход отсутствует. Обычно ассемблер используется только для написания небольших и четко локализованных фрагментов при- ложения, таких, как обработчики прерываний, драйверы устройств, критические по времени исполнения секции.
Язык программирования ADA. Первым полным языком программи- рования в реальном времени является ADA. В середине 1970-х годов Мини- стерство обороны США для сокращения расходов на разработку и сопрово- ждение своих систем управления реального времени приняло решение ввести единый язык программирования в качестве альтернативы сотням ис- пользовавшихся тогда языков. В 1979 году министерство одобрило предло- жения, выдвинутые французской компанией Honeywell Bull. Язык назван в честь Августы Ады Байрон, графини Лавлейс (Augusta Ada Byron, Countess of Lovelace, 1815-1852), которую можно считать первым программистом в истории - она писала программы для аналитической машины (механического компьютера, который никогда не был построен), спроектированной анг- лийским изобретателем Чарльзом Бэббиджем (Charles Babbage).
Язык ADA является полной средой разработки программ с текстовым редактором, отладочными средствами, системой управлениями библиотека- ми и т.д. Спецификации ADA закреплены американским стандартом
ANSI/MIL-STD-1815A и включают средства контроля соответствия этому стандарту. Не допускаются диалекты языка - для сертификации компилятор должен правильно выполнить все эталонные тесты.
Структура языка ADA похожа на структуру языка Pascal, но его воз- можности значительно шире, в особенности применительно к системам ре- ального времени. Процессу в ADA соответствует задача, которая выполня- ется независимо от других задач на выделенном виртуальном процессоре, то есть параллельно с другими задачами. Задачи могут быть связаны с отдель- ными прерываниями и исключениями, и работать как их обработчики.
Новым понятием, введенным в ADA, является пакет - модуль со свои- ми собственными описаниями типов данных, переменных и подпрограмм, в котором явно указано, какие из программ и переменных доступны извне. Па- кеты могут компилироваться отдельно с последующим объединением в один исполняемый модуль. Это средство поддерживает модульную разработку программ и создание прикладных библиотек. В начале 1990-х годов язык ADA был пополнен новыми функциями для объектно-ориентированного программирования и программирования в реальном времени.
Машинно-ориентированное программирование низкого уровня под- держивается ADA не достаточно эффективно - это следствие постулата, что все задачи должны решаться средствами высокого уровня. Например, для операций ввода/вывода в ADA используются прикладные пакеты с заранее определенными функциями для управления аппаратными интерфейсами и доступа к внешним данным.
Основным недостатком ADA является его сложность, которая делает язык трудным для изучения и применения. Существующие компиляторы являются дорогостоящими продуктами и требуют мощных процессоров. До сих пор ADA не получил ожидавшейся популярности, и сомнительно, что это когда-нибудь произойдет.
Языки С и C++. Язык программирования С, несмотря на отсутствие в нем многих средств, которые теоретики считают необходимыми для хороше- го языка программирования, пользуется большим успехом, начиная с 1980-х годов и по настоящее время. Этот язык стал популярным для всех приложе- ний, требующих высокой эффективности, в частности для программ реально- го времени. Для обычных микропроцессоров, используемых в системах управления, имеются С-компиляторы и системы разработки многих произво- дителей. В промышленности существует явная тенденция к широкому при- менению языка С и операционной системы UNIX, которая сама написана на С, поскольку приложения, написанные на С, машинно-независимы и требуют не больших усилий для адаптации к работе в различной аппаратной среде.
Философией С является разбиение программ на функции. С - слаботи- пизированный язык и позволяет программисту делать почти все вплоть до манипуляции с регистрами и битами. Такая свобода делает язык небезопасным, поскольку компилятор не может проверить, являются ли подозрительные операции умышленными или нет. Небольшое количество заранее определенных функций и типов данных делает программы легко
переносимыми между разными системами. С поддерживает как хороший, структурированный, так и плохой стиль программирования, оставляя ответственность за качество разработки на программисте. Стиль программирования приобретает особое значения при сопровождении программ: плохо написанная и откомментированная программа на С - такая же загадка, как и ассемблерский код. Язык С регламентирован международным стандартом ISO 9899.
Язык С предпочтителен для написания программ с обращениями к функциям операционной системы, так как он обладает отличной совместимо- стью между логикой определения переменных и синтаксисом обращения к системе. Поскольку наиболее распространенные операционные системы в приложениях автоматического управления процессами основываются на UNIX, язык С является почти вынужденным выбором при разработке про- грамм. Почти все примеры в современной технической литературе представ- лены на С.
C обеспечивает получение высокой производительности за счет хоро- шо разработанных оптимизирующих компиляторов, которые для современ- ных процессоров часто дают код более эффективный, чем написанный на ас- семблере. Язык C дает прямой доступ к оборудованию и возможность вызова процедур на других языках. Приложения получаются переносимыми (осо- бенно, если ОСРВ поддерживают одинаковый стандарт, например POSIX), однако, объектно-ориентированный подход на уровне языковых конструкций отсутствует.
Язык C++ представляет собой значительно более мощный инструмент, чем С, на основе которого он создан. В C++ значительно улучшена абстракция данных с помощью понятия класса, похожего на абстрактный тип данных с четким разделением между данными и операциями. Классы C++ значительно легче использовать на практике, чем аналогичные понятия в других языках, поскольку C++ поддерживает объектно-ориентированное программирование и поэтапное уточнение типов данных.
Главным преимуществом языка C++ является его способность поддер- живать разработку легко используемых библиотек программ. Программиро- вание в реальном времени непосредственно в C++ не поддерживается, но может быть реализовано с помощью специально разработанных программ- ных модулей и библиотек классов.
C++ включает язык C как подмножество и наследует все его положи- тельные качества. C++ добавляет поддержку объектно-ориентированного подхода на уровне языковых конструкций.
Java. Как язык интерпретируемого типа, имеет очень низкую эффек- тивность получаемого кода. Доступ к оборудованию и вызовы процедур на других языках - только посредством библиотечных функций (обычно напи- санных на C). Java обеспечивает наивысшую переносимость приложения на уровне двоичного кода и является объектно-ориентированным языком.
BASIC. Язык BASIC является простейшим среди языков программи- рования высокого уровня. Этот язык был создан в 1964 году для поддержки интерактивной разработки программ с удаленных терминалов. Из-за своей простоты BASIC часто критикуется опытными программистами, и несо- мненно, что этот язык не является хорошим средством для создания больших структурированных систем. С другой стороны, небольшие приложения на BASIC можно разработать значительно быстрее, чем на других языках. Кроме того, BASIC имеется почти на всех мини- и микрокомпьютерах.
Программа на BASIC может компилироваться, но чаще она интерпре- тируется, то есть каждая команда транслируется в машинные коды только в момент ее выполнения. BASIC удобен для разработки небольших приклад- ных задач в составе крупных систем, но его не следует использовать для приложений порядка 500-1000 строк или более. Тем не менее, BASIC является наилучшим средством для непрофессиональных программистов, которым требуется быстро решить частную задачу. Командные языки, основанные на BASIC, имеются во многих системах промышленной автоматики. Они применяются для написания простых программ управления без обращения к более сложным средствам программирования, требующим компиляции и загрузки.
FORTRAN. FORTRAN - это первый язык программирования высокого уровня, который, по-видимому, способствовал, более чем какой- либо другой язык, распространению и практическому применению ЭВМ. Выпущенный в 1957 году, он до сих пор широко используется, в особенности для математических вычислений. В целом FORTRAN имеет ограниченные возможности определения типа, весьма сложный способ работы с нечисловыми данными и не содержит многих важных функций языков реального времени, чтобы его серьезно рассматривать для этой цели. Новые версии FORTRAN заимствовали некоторые возможности из других языков и поддерживают более развитые структуры данных. В этом смысле различия между FORTRAN и другими языками сглаживаются.
Благодаря тому, что язык имеет устойчивое применение в научных приложениях, нередко данные в системах реального времени обрабатывают- ся существующими FORTRAN-программами, а новые программы анализа и статистики пишутся на FORTRAN. В подобных случаях основной проблемой является координация передачи информации между базами данных реально- го времени и прикладными модулями, написанными на FORTRAN. Такая ко- ординация обычно выполняется операционной системой. FORTRAN не ре- комендуется для написания драйверов устройств или модулей на уровне опе- рационной системы, так как для этой цели лучше подходят другие языки.
Pascal и Modula-2. Pascal был разработан швейцарцем Николасом Вир-том (Niklaus Wirth) в 1971 году как дидактический язык для обучения хорошей технике программирования. Он быстро перерос свои первоначальные рамки и в настоящее время используется во множестве разнообразных приложений. Успех Pascal, как в случае BASIC, основан на распространении микро- и персональных компьютеров, на которых он
широко используется. Язык Modula-2 был разработан тем же автором в 1975 году специально для программирования встроенных промышленных и научных вычислительных систем реального времени. Pascal и Modula-2 весьма похожи по стилю и структуре, хотя Modula-2 обладает большим количеством функций и синтаксических конструкций.
В Pascal и Modula-2 предполагается, что программист постоянно оста- ется в ограниченной среде, предоставляемой программой, что совсем не со- ответствует реальной практике. Гибкость их использования несколько выше, если некоторые программы для специальных приложений (драйверы уст- ройств, обработчики прерываний) написаны на языке ассемблера. Оба языка поддерживают подключение внешних модулей на ассемблере. Pascal и Modula-2 являются хорошим средством для разработки встроенных систем, но не подходят для сложных приложений в распределенных компьютерных системах. Их ориентация на структуру делает программы хорошо читаемы- ми, что является существенным фактором для последующего сопровождения. Языки четвертого поколения (CASE средства). Средства CASE (Computer Aided Software Engenering) получили широкое распространение при разработке приложений реального времени в силу большой сложности последних. Языки «четвертого поколения» представляют собой формализо- ванный способ описания объектов, их свойств и взаимоотношений между со- бой. По этому формальному описанию «компилятор» строит текст приложе- ния на языке более низкого уровня (обычно предоставляется выбор между C/C++/Java). Затем этот текст можно скомпилировать уже «обычным» ком- пилятором. Поскольку можно добавлять фрагменты на языке более низкого уровня, то CASE средства наследуют все положительные свойства последне-
го.
1. Обработка прерываний и исключений.
2. Программирование операций ожидания.
3. Внутренние подпрограммы операционной системы.
4. Приоритеты процессов и производительность системы.
5. Тестирование и отладка.
1. Обработка прерываний и исключений
Системы реального времени соединены с внешней средой (физический процесс) через аппаратные интерфейсы. Доступ к интерфейсам и внешним данным осуществляется либо по опросу, либо по прерыванию.
При опросе программа должна циклически последовательно проверять все входные порты на наличие у них новых данных, которые затем считываются и обрабатываются. Очередность и частота опроса определяют время реакции системы реального времени на входные сигналы. Опрос является простым, но неэффективным методом из-за повторяющихся проверок входных портов.
Получение данных по прерыванию происходит иначе. Интерфейсное устройство, получившее новые данные, привлекает внимание центрального процессора, посылая ему сигнал прерывания через системную шину. По от- ношению к текущему процессу прерывания являются асинхронными собы- тиями, требующими немедленной реакции. Получив сигнал прерывания, про- цессор приостанавливает исполнение текущего процесса, сохраняет в стеке его контекст, считывает из таблицы адрес программы обработки прерывания и передает ей управление. Эта программа называется обработчиком преры- вания. Другой вариант обработки прерываний заключается в том, что плани- ровщик выбирает из очереди ожидания этого события или прерывания сле- дующий процесс и переводит его в очередь готовых процессов.
Когда процессор передает управление обработчику прерываний, он обычно сохраняет только счетчик команд и указатель на стек текущего про- цесса. Обработчик прерываний должен сохранить во временных буферах или в стеке все регистры, которые он собирается использовать, и восстановить их в конце. Эта операция критична по времени и, как правило, требует запрета прерываний для того, чтобы избежать переключения процессов во время ее выполнения.
При управлении прерываниями время реакции должно быть как можно меньше. Оно представляет собой сумму времени, необходимого процессору, чтобы среагировать на прерывание (латентность прерывания), и времени, необходимого на переключение контекста до запуска обработчика прерываний. Типичная загрузка системы также играет определенную роль. Если система должна обслуживать много одновременных прерываний, вновь поступающие прерывания будут ждать в очереди, пока процессор не освободится.
Программы обработки прерывания должны быть предельно компакт- ными (длина кода) и короткими (время выполнения). Если сложное действие, требующее большого расхода процессорного времени, например вычисления или доступ к базе данных, необходимо выполнить после возникновения пре- рывания, то его лучше вынести из обработчика прерывания в процесс. Про- грамма обработки прерывания должна выполнять лишь минимально необхо- димые операции, например, считать входные данные, сформировать сообще- ние и передать другой программе, извещая ее, что произошло прерывание и требуется дальнейшая обработка. Хорошим стилем для обработчиков преры- ваний является использование реентерабельного кода. Это позволяет избе- жать конфликтов в случае, если прерывается сам обработчик и тот же код вызывается для обслуживания нового прерывания прежде, чем закончилась обработка предыдущего.
Реакция на исключения (exceptions) похожа на обработку прерываний. Исключениями называются нештатные ситуации, когда процессор не может правильно выполнить команду. Примером исключения является деление на ноль или обращение по несуществующему адресу. В англоязычной литерату- ре для разных видов исключений применяются термины trap, fault, abort (не путать с "взаимным исключением" - mutual exclusion).
Обычно операционная система обрабатывает исключения, прекращая текущий процесс, и выводит сообщение, четко описывающее ситуацию, на устройство отображения, обычно монитор или принтер. Приемлемая при по- следовательной интерактивной многопользовательской обработке, внезапная остановка процесса в системах реального времени должна быть абсолютно исключена. Нельзя допустить, чтобы управляемые микропроцессором авто- пилот самолета или автоматическая тормозная система автомобиля (Auto- matic Braking System - ABS), внезапно прекратили работу из-за деления на ноль. В системах реального времени все возможные исключения должны анализироваться заранее с определением соответствующих процедур обра- ботки.
Сложной проблемой при обработке исключений является проверка, что исключение не возникнет снова после того, как оно было обработано. Или иными словами, обработка исключений должна заниматься причиной, а не симптомами аномальной ситуации. Если исключение обработано некорректно, оно может возникнуть опять, заставляя процессор снова и снова переходить к модулю обработки. Например, обработчик деления на нуль должен проверять и изменять операнды, а не просто возобновлять исполнение с места, предшествующего ошибке, что приведет к бесконечному циклу.
Фактические адреса программных модулей известны только после их загрузки. При запуске системы в таблицу обработки прерываний записыва- ются адреса памяти, куда загружаются обработчики, которые затем вызыва- ются по ссылкам из этой таблицы.
2. Программирование операций ожидания
Процесс реального времени может явным образом ждать истечения некоторого интервала (относительное время) или наступления заданного мо- мента (абсолютное время). Соответствующие функции обычно имеют сле- дующий формат:
wait (n) и
wait until (время)
где n - интервал в секундах или миллисекундах, а переменная "время" имеет формат часы, минуты, секунды, миллисекунды.
Когда выполняется одна из этих функций, операционная система по- мещает процесс в очередь ожидания. После истечения/наступления заданно- го времени процесс переводится в очередь готовых процессов.
Распространенный, но не лучший метод организации временной за- держки - цикл, контроль системного времени в цикле занятого ожидания
repeat (*холостой ход*)
until (time = 12:00:00);
Как правило, подобные активные циклы ожидания представляют собой бесполезную трату процессорного времени, и их следует избегать. Однако имеются исключения. В системе, где аналого-цифровое преобразование занимает 20 мкс, а операция переключения процессов - 10
мкс, более экономно организовать ожидание на 20 мкс перед тем, как считать новые данные, чем начинать процедуру переключения процессов, неявно подразумеваемую "хорошей" операцией ожидания. Каждый случай требует индивидуального подхода - для этого обычно нужно хорошее знание системы и развитое чутье.
Важной особенностью процессов, запускаемых периодически, - например, фильтрация и алгоритмы регулирования, - является накопленная ошибка времени. Это связано с тем, что процесс из очереди ожидания события опять попадает в очередь, но уже готовых процессов и должен ждать некоторый случайный интервал времени прежде, чем получит управление (рис. 1а). Требуемое и фактическое время пробуждения процесса не совпадают. Ошибки ожидания накапливаются, если это время рассчитывается так новое время пробуждения = время начала ожидания + интервал По такому алгоритму работает холостой цикл "ждать 10 секунд". Накопленная временная ошибка представляет собой сумму времени, проведенного в очереди, и времени, необходимого для непосредственного исполнения. Правильное решение получается, если отсчет ведется от момента предыдущего пробуждения
Таким образом, относительное время преобразуется в абсолютное. На практике необходимы две команды
wait until (ref_time);
ref_time := ref_time + 10 seconds;
Рисунок 1. - (а) Неправильный способ определения момента очередного запуска периодических задач - ошибка времени накапливается; (б) пра- вильное решение - ошибка времени не накапливается
3. Внутренние подпрограммы операционной системы
Типичной ситуацией при программировании в реальном времени является непосредственное обращение к подпрограммам операционной системы из-за того, что в используемом языке программирования отсутствует эквивалентное средство. Обращения к функциям операционной системы также необходимы при работе в сетевой и распределенной среде. Операционная система отвечает за все обслуживание прикладных задач, включая файловые и сетевые операции. Простое обращение к операционной системе может привести к сложной последовательности действий для доступа к удаленной базе данных, включая все сопутствующие проверки и операции управления, избавляющие прикладную программу от лишних деталей. Интерфейс операционной системы делает выполнение таких операций более прозрачным и упрощает написание сложных программ.
Многие языки программирования высокого уровня, например С, обес- печивают интерфейс с операционной системой для непосредственного вызо- ва ее модулей из исполняемых процессов. Существуют различные виды про- граммных интерфейсов с операционной системой непосредственные вызовы, примитивы и доступ через библиотечные модули.
Непосредственные (системные) вызовы осуществляются с помощью конструкции языка высокого уровня, которая передает управление подпро- грамме, являющейся частью операционной системы. Необходимые парамет- ры передаются списком, как при обычном обращении к подпрограмме. После завершения системной процедуры результат возвращается вызывающей про- грамме.
Так как в многозадачной среде системные программы и примитивы могут вызываться одновременно разными процессами, их код всегда реентера-белен. Это позволяет избежать конфликтов при прерывании системной программы другим запросом, требующим ту же услугу из другого контекста.
В некоторых случаях для доступа к внутренним ресурсам операцион- ной системы можно использовать библиотечные модули. Эти модули уже предварительно откомпилированы, и их остается только связать с основной программой. Необходимо проверить по документации системы требуемые параметры, а также механизмы их передачи и редактирования связей в языке высокого уровня.
4. Приоритеты процессов и производительность системы Многозадачная операционная система реального времени должна до-
пускать назначение приоритетов исполняемым процессам. Обычно приори- теты являются динамическими, что означает, что во время исполнения они могут изменяться как самими процессами, так и операционной системой. Обычно существуют определенные ограничения и механизмы контроля, ко- торые определяют, кто и как может менять приоритеты. Назначение приори- тетов оказывает серьезное влияние на работу системы в целом.
Наиболее важные процессы или процессы, время реакции которых же- стко ограничено, получают более высокий приоритет. К последним относятся обработчики прерываний. Задачи, выполняющие менее важные действия,
например печать, получают более низкий приоритет. Очевидно, что необхо- димо обращать внимание на соглашения, используемые в системе относи- тельно того, связан ли более высокий приоритет с большим или меньшим числом. Приоритеты имеют относительное значение и оказывают влияние только тогда, когда существуют процессы с разными приоритетами.
В системах реального времени реакция на прерывания отделена от вы- числений, требующих значительных ресурсов процессора. Как только проис- ходит событие или прерывание, его обработчик немедленно включается в очередь готовых процессов. Программы обработчиков прерываний обычно компактны, так как они должны обеспечивать быструю реакцию, например ввод новых данных, и передавать управление более сложным процессам, интенсивно потребляющим ресурсы процессора, которые исполняются с более низким приоритетом.
В примере системы управления манипулятором робота одна задача, которую можно построить как обработчик прерываний, ждет поступления от датчика новых данных о текущем положении манипулятора. Когда поступает прерывание от датчика - есть новые данные, - эта задача должна сразу полу- чить управление. Затем она передает данные о положении программе их об- работки, требующей больших вычислительных ресурсов. Эта программа не отвечает за обработку прерываний и может использовать больше времени для вычислений.
Производительность системы реального времени значительно труднее поддается оценке, чем систем, использующих обычные последовательные программы. Если обычная последовательная программа исполняется на кон- кретном процессоре с известной скоростью, то программа реального времени зависит от поведения окружающей среды, то есть управляемых технических процессов. Общая производительность системы должна быть достаточной для того, чтобы выполнять все операции и выдавать результаты за установ- ленное время. Иными словами, система реального времени всегда должна быть готова к максимальной нагрузке, которую может создать технический процесс.
В развитых и сложных операционных системах, таких как UNIX, и в еще большей степени в распределенных операционных системах, доступ к большинству функций (ввод/вывод, сетевая поддержка и т.д.) происходит че- рез системные вызовы или механизм удаленного вызова процедур. В при- кладных программах для вызова системных функций используется довольно простая нотация, за которой, как правило, стоит длинная последовательность действий операционной системы. Если между двумя процессами, исполняю- щимися в разных узлах сети, организован программный канал, то считывание одного символа из этого канала требует целой серии операций в обоих узлах.
Поскольку на эти операции обычно наложены жесткие ограничения по времени, необходимо провести глубокий предварительный анализ прежде, чем принимать то или иное проектное решение. Если локальная сеть используется не только задачами реального времени, но и интерактивными
пользователями, то от количества и активности последних, в значительной мере зависит и ее общая нагрузка.
Многозадачные операционные системы имеют команды, показываю- щие в каждый момент все активные процессы, их текущий статус (например, ожидание ввода/вывода, ожидание прерывания) и долю в потреблении ресур- сов процессора с момента последней перезагрузки системы или какого-либо иного события. Первый шаг по проверке характеристик системы - анализ ее работы с помощью подобной команды. Выявление процессов, занимающих слишком большую долю процессорного времени, может быть хорошей от- правной точкой для поиска узких мест и оптимизации характеристик систе- мы. Нет ничего плохого в том, если некоторые процессы загружают процес- сор больше, чем другие, однако разработчик системы должен иметь ясное представление о том, когда это происходит и почему.
5. Тестирование и отладка
Доказательство правильности работы программы является обязатель- ным шагом в ее разработке. Необходимо проверить, что программа выполня- ет свои функции без ошибок. Визуальные и формальные методы позволяют выявить только ограниченное количество ошибок. На практике это означает, что формальная теория тестирования имеет мало смысла, а основную роль играет собственный опыт и "народные программистские" предания. Реальное тестирование проводится в "боевых" условиях.
Выявлять ошибки трудно - многие из них проявляются спорадически и их нельзя воспроизвести по желанию. Никакое доказательство не может га- рантировать, что программа полностью свободна от ошибок, и никакие тесты не могут убедить, что выявлены все ошибки. Цель тестирования - найти как можно большее число ошибок и гарантировать, что программа работает с ра- зумной надежностью. Один из создателей теории операционных систем, Эдс- гер Дейкстра (Edsger Dijkstra), заметил: "Тестирование может доказать толь- ко наличие ошибок, но не их отсутствие".
Тщательный тест требует соответствующей разработки и подготовки; необходимо сочетание практических и аналитических тестов. Сначала тесто- вые процедуры и данные, ожидаемые результаты описываются в специаль- ном документе. В процессе тестирования ведется журнал испытаний, кото- рый затем сравнивается со спецификацией тестов. Желательно, чтобы кол- лектив разработчиков системы отличался от того, который будет определять процедуры испытаний и проводить их.
При тестировании систем реального времени существует дополнительная сложность из-за большого количества возможных взаимосвязей между задачами. Вероятность внесения новой ошибки при исправлении старой очень велика - имеющийся опыт разработки программ размером свыше 10000 строк дает вероятность в пределах от 15 до 50%.
Существует два основных метода тестирования – исчерпывающий, и на примерах. При исчерпывающем тестировании проверяются все возможные комбинации входных и выходных данных. Очевидно, что этот
метод можно использовать лишь в случае, если число таких сочетаний невелико.
Метод испытаний на примерах используется наиболее часто. Произво- дится выбор репрезентативного числа сочетаний входа и выхода. Тестовые данные должны также включать крайние значения, например находящиеся за пределами допустимого диапазона. Тестируемый модуль должен правильно распознать и обработать эти данные.
В многозадачных системах программные модули вначале тестируются отдельно. Во время такого тестирования должно быть проверено, что каждая строка программы выполняется хотя бы один раз. Иными словами, если программа содержит команды ветвления типа "if..then..else", то тестовые данные должны обеспечить выполнение обеих ветвей.
На этой фазе тестирования обычно полезны отладчики. Они позволяют непосредственно просматривать и изменять регистры процессора и области памяти при исполнении машинного кода. Отладчик вставляет в машинный код программы точки останова, в которых можно проверить состояние регистров и переменных и сравнить их со значениями, требуемыми логикой процесса. Однако с ростом сложности операционных систем и расширением функциональности системных вызовов, код которых обычно неизвестен программисту, использование отладчика может оказаться мало полезным. Обычные пошаговые отладчики не позволяют полностью оценить взаимодействие между несколькими параллельными процессами. Однако отладчики являются полезными и необходимыми средствами при разработке программ на ассемблере.
Только после того как все модули были проверены по отдельности и все обнаруженные ошибки исправлены, можно приступать к параллельному исполнению для отладки взаимодействия. Многочисленные взаимосвязи программных модулей могут привести к ошибкам в системе, даже если от- дельные модули работают правильно. Общая работа системы - время обра- ботки прерываний, производительность при разной нагрузке - проверяется на основе тестовой спецификации. Особое внимание следует обратить на функ- ции, обеспечивающие надежность и безопасность системы.
Если система включает в себя обработку прерываний и исключений, то необходимо проверить корректность соответствующей реакции. Имитация ошибочных ситуаций позволяет оценить их последствия для системы и ее поведение в этом случае.
Результаты тестов отдельных модулей и комплексной отладки заносятся в протокол испытаний, и на его основе вносятся необходимые исправления. Ошибки тем труднее исправляются, чем позже они были обнаружены.
Расходы на тестирование - это инвестиции не только в качество системы, но и в ее общую экономическую эффективность, поскольку значительная часть расходов в течение жизненного цикла системы уходит на ее сопровождение, то есть, в конечном счете, на выявление и устранение ошибок.
145
ВРЕМЕНИ
Лекция 5.1. Методика комплексного проектирования и отладки систем реального времени
1. Этапы проектирования и отладки систем реального времени.
1. Основные этапы проектирования и отладки микропроцессорных и микроконтроллерных систем
Методики проектирования и отладки систем реального времени ис- пользуют методологию создания микропроцессорных и микроконтроллерных систем и имеют определенную специфику. Микроконтроллерные системы ориентированы на выполнение задач управления определенными устрой- ствами или их комплексами. Микропроцессорные системы можно условно разделить на два основных класса: универсальные, которые используются для решения широкого круга задач обработки информации, и управляющие, которые специализируются на решении задач управления процессами и объ- ектами. Типичными примерами универсальных микропроцессорных систем являются персональные компьютеры и рабочие станции, которые применя- ются в самых различных сферах деятельности.
Управляющие микропроцессорные системы имеют много общего с микроконтроллерными. Они используются обычно для реализации сложных алгоритмов управления, требующих большой вычислительной мощности процессора, которую не могут обеспечить микроконтроллеры. При этом пе- риферийные устройства, многие из которых располагаются на кристалле микроконтроллера, в микропроцессорных системах реализуются с помощью дополнительных микросхем, что повышает их стоимость и снижает надеж- ность. Разработка интегрированных микропроцессоров, имеющих в своем составе ряд периферийных устройств, и сложно-функциональных микрокон- троллеров, содержащих высокопроизводительное 32-разрядное процессорное ядро, приводит к размыванию границы применения управляющих микропроцессорных и микроконтроллерных систем, постепенному стиранию функциональных и структурных различий между ними.
Основной особенностью микроконтроллеров является наличие в их составе ПЗУ (ППЗУ, РППЗУ, ЭСППЗУ, флэш-памяти), в которое записывается резидентная рабочая программа системы. Разработка, отладка и запись в ПЗУ этой программы являются важнейшими стадиями проектирования микроконтроллерных систем. Записанная в ПЗУ рабочая программа становится составной частью системы, последующее изменение или коррекция которой обычно нежелательна или невозможна. При использовании внутреннего ПЗУ возможности внешнего контроля работы микроконтроллера в процессе отладки очень ограничены. Поэтому комплексная отладка программного и аппаратного обеспечения микроконтроллерных систем является достаточно сложной процедурой, требующей использования специализированных методов и средств контроля. Данный этап проектирования является наиболее ответственным, так как не выявленная ошибка может привести к весьма дорогостоящим последствиям.
Особенностью микроконтроллерных систем для ряда областей применения является необходимость строгого соблюдения определенных норм времени на выполнение программы или ее отдельных модулей.
В микропроцессорных схемах выполняемые модули рабочей програм- мы загружаются в ОЗУ. Благодаря этому имеется возможность оперативной коррекции рабочей программы в случае необходимости. В процессе отладки проектировщик имеет доступ к общей шине, что облегчает текущий контроль за работой системы. Однако, наличие в большинстве современных микро- процессоров внутренней кэш-памяти ограничивает возможности внешнего контроля за ходом выполнения программы. Особенно возрастают сложности отладки при использовании микропроцессоров с суперскалярной структурой, в которых несколько команд выполняются одновременно и естественная оче- редность их выполнения может не соблюдаться.
Рассмотрим основные этапы проектирования и отладки систем реального времени и особенности их реализации.
Общая процедура проектирования и отладки систем реального времени включает этапы, показанные на рис.1.
Рисунок 1. - Основные этапы проектирования и отладки систем реаль-
ного времени
Исходные данные для проектирования содержат требования к основ- ным технико-экономическим показателям: производительности, энергопо-
треблению, стоимости, надежности, конструктивным и другим параметрам. Кроме того, для управляющих систем должны быть определены реализуемые алгоритмы управления, для универсальных систем - классы выполняемых за- дач.
Разработка архитектуры системы подразумевает определение опти- мального состава аппаратных и программных средств для решения поставленных задач. При этом разработчик решает, какие функции системы будут реализованы аппаратными средствами (АС), а какие - программным обеспечением (ПО). Определяется номенклатура АС - выбираются тип микропроцессора или микроконтроллера, объем и тип памяти, номенклатура периферийных устройств, протоколы обмена информацией и состав требуемых сигналов управления системой. Определяется также состав ПО - наличие операционной системы, ее тип и характеристики, номенклатура необходимых программных модулей, характер их взаимодействия, используемый язык программирования. Результатом выполнения этого этапа являются частные технические задания на проектирование АС и ПО.
Этап разработки АС может быть выполнен традиционными методами, с помощью которых проектируется и моделируется электрическая схема, разрабатывается печатная плата или комплект плат, после чего выполняется монтаж и отладка системы. Однако во многих случаях можно обеспечить со- кращение сроков и повышение качества разработки АС путем использования "полуфабрикатов" или готовых изделий, выпускаемых рядом производите- лей.
Существует достаточно большая номенклатура таких изделий, которые носят, названия оценочных или целевых плат (evaluation board, target board), оценочных наборов или систем (evaluation kit, evaluation system), одноплатных компьютеров или контроллеров (SBC-single-board computer, single-board controller). Эти изделия в отечественной литературе называют платами развития. В их состав входит базовый микропроцессор или микроконтроллер, память (ОЗУ, флэш-память, служебное ПЗУ), ряд периферийных и вспомогательных схем. Обычно такие платы имеют соединитель для подключения к персональному компьютеру, с помощью которого производится комплексная отладка системы.
Если состав средств, имеющихся на плате развития, достаточен для реализации проектируемой системы, то ее разработка сводится к созданию ПО и выполнению комплексной отладки системы. Если имеющихся средств недостаточно, то они проектируются и размещаются на дополнительной пла- те, подключаемой к соединителю на плате развития непосредственно или с помощью кабеля. Так реализуется прототип проектируемой системы, на ко- тором можно выполнить комплексную отладку программных и аппаратных средств, а в ряде случаев и провести проверку их функционирования в рабо- чих условиях. После этого разрабатывается рабочий вариант системы, объе- диняющий на одной плате используемые модули прототипной системы. Про- тотипная система может использоваться в качестве рабочей (целевой), если ее параметры и конструктивное оформление удовлетворяют требованиям
технического задания. В этом случае достигается сокращение сроков и стои- мости проектирования системы.
Особенно следует отметить перспективность использования при разработке АС мезонинной технологии, которая унифицирует размеры и интерфейс базовой платы- носителя и размещаемых над ней небольших плат- мезонинов (типичный размер 45 х 99 мм). Одна плата- носитель несет от 2 до
12 мезонинов. Каждый мезонин соединяется с носителем двумя соединителями, которые выполняют также функции механических держателей. Один соединитель подключается к локальной шине платы- носителя, функциональное назначение контактов второго соединителя определяется типом мезонина, который может содержать многоканальную систему ввода-вывода, сетевые адаптеры и другие устройства. Используя серийно выпускаемые рядом производителей платы-носители и набор мезонинов, разработчик может быстро реализовать сложно-функциональные целевые системы для разнообразных применений.
Лидерами в этой области являются фирмы Green Spring Computers (США) и PEP Modular Computer (Германия), которые выпускают большую номенклатуру плат-носителей и мезонинов. Интеллектуальные платы- носители представляют собой одноплатные компьютеры или контроллеры, реализованные на базе высокопроизводительных микропроцессоров (MC68030, MC68040 и др.) или микроконтроллеров (МС68332, МС68360 и др.), которые имеют связь с персональным компьютером. Такие носители мо- гут выполнять функции плат развития и использоваться в составе прототип- ных и целевых систем. Серийно выпускаемые мезонины (их около 300 типов) выполняют функции дополнительной памяти и периферийных различных устройств: параллельных и последовательных портов, таймеров-счетчиков, АЦП и ЦАП, сетевых и шинных контроллеров и др. При необходимости раз- работчик может самостоятельно спроектировать мезонин, выполняющий функции, которые необходимы для прототипной или целевой системы.
Таким образом, мезонинная технология является наиболее эффектив- ным средством разработки современных электронных систем различного на- значения, позволяя конфигурировать их из стандартных плат при минималь- ных затратах времени и средств на разработку дополнительных АС.
На этапе автономной отладки АС основными орудиями разработчика являются традиционные измерительные приборы - осциллографы, мульти- метры, пробники и другие, а также логические анализаторы, которые обла- дают широкими возможностями контроля состояния различных узлов систе- мы в заданные моменты времени. Весьма эффективным является использо- вание на этом этапе средств тестирования по стандарту JTAG, которые име- ются в составе многих современных моделей микропроцессоров и микрокон- троллеров. С помощью размещенного на кристалле тест-Порта ТАР и специ- альных выводов TDI, TDO, ТСК, TMS, TRST# обеспечивается возможность подачи необходимых входных воздействий и считывания выходной реакции, запуск-останов процессора, изменение режима его работы. Вводом специ- альной команды можно установить выводы микропроцессора или микрокон-
троллера в отключенное состояние, чтобы отдельно протестировать другие устройства системы.
При разработке для универсальных микропроцессорных систем ис- пользуется достаточно широкий набор языков высокого уровня, для которых имеются соответствующие компиляторы. Чаще всего используются языки С, C++, FORTRAN, Pascal, Forth. Для решения ряда задач применяются языки поддержки искусственного интеллекта Ada, Modula-2 и некоторые другие. При программировании управляющих систем чаще всего используются ма- шинно-ориентированный язык Ассемблера или языки С, C++. Язык Ассемб- лера применяется в случаях, когда имеются жесткие ограничения на объем требуемой памяти или на время выполнения программных модулей. Такие случаи являются достаточно типичными при решении задач управления, по- этому Ассемблеры являются одним из основных средств создания ПО для микроконтроллерных систем. В тех случаях, когда указанные ограничения не очень жесткие, для создания ПО используются языки высокого уровня, обычно С, C++.
Автономная отладка ПО выполняется с помощью симулятора - про- граммной модели используемого микропроцессора или микроконтроллера. На этом этапе разработчики используют широкий набор средств программи- рования - компиляторы, ассемблеры, дисассемблеры, отладчики, редакторы связей и другие, без которых практически невозможно создание работоспо- собного ПО в течение ограниченных сроков выполнения проекта.
Комплексная отладка АС и ПО является наиболее сложным и ответст- венным этапом создания системы. На этом этапе разработчик использует весь набор программных и аппаратных средств, применяющихся для авто- номной отладки АС и ПО, а также ряд специальных средств комплексной от- ладки. К числу таких средств относятся схемные эмуляторы - специализиро- ванные устройства, включаемые вместо микропроцессора или микрокон- троллера прототипной системы и обеспечивающие возможность контроля ее работы с помощью персонального компьютера, связанного со схемным эму- лятором. Схемные эмуляторы являются наиболее эффективным средством комплексной отладки систем.
Следует отметить, что многие модели микропроцессоров и микрокон- троллеров имеют специальный режим отладки BDM, при котором реализует- ся ввод команд, ввод-вывод данных, управление режимом работы процессора с помощью последовательного специального порта. При его использовании микропроцессор или микроконтроллер может работать в режиме эмуляции под управлением подключаемого к этому порту персонального компьютера. Режим BDM позволяет существенно облегчить процедуру комплексной от- ладки и использовать при этом более простые и дешевые средства.
Одним из наиболее эффективных средств комплексной отладки микроконтроллерных систем являются эмуляторы ПЗУ. Эти устройства включаются вместо ПЗУ прототипной системы и работают под управлением подключенного к ним персонального компьютера. Так обеспечивается
текущий контроль за выполнением программы и ее оперативная коррекция, что значительно упрощает процесс отладки.
Для микроконтроллерных систем заключительной процедурой ком- плексной отладки является запись в ПЗУ объектных модулей отлаженной программы и завершающее испытание ее работоспособности. Запись про- граммы в ПЗУ осуществляется с помощью специальных программаторов.
Для универсальных микропроцессорных систем после комплексной отладки производится оценка их производительности путем прогона специального набора тестовых программ (benchmarks).
После выполнения указанных этапов отлаженная прототипная система может быть испытана в рабочих условиях с подключением полного набора реальных периферийных устройств и объектов управления. В процессе опытной эксплуатации выявляются ошибки, не обнаруженные на этапе отладки, определяется реакция системы на возможные непредвиденные ситуации. В процессе разработки, при создании современных микропроцессорных и микроконтроллерных систем используется комплекс программно-аппаратных средств, которые помогают качественно и в ограниченные сроки выполнить их проектирование и отладку.
1. Логические анализаторы.
2. Схемные эмуляторы.
3. Эмуляторы ПЗУ.
4. Платы развития.
На различных этапах проектирования и отладки систем используются следующие специализированные аппаратные средства: логические анализа- торы; различные виды плат развития; схемные эмуляторы, отладочные ком- плексы; эмуляторы ПЗУ; программаторы.
Рассмотрим основные особенности структуры и применения этих средств, используемых при разработке систем на базе микропроцессоров и микроконтроллеров.
1. Логические анализаторы
Логические анализаторы (ЛА) являются универсальными приборами для анализа функционирования цифровых систем. Они позволяют контроли- ровать логическое состояние нескольких десятков точек системы в течение заданного промежутка времени и выдать информацию о состоянии в визу- альном (на экране монитора) или печатном виде. Форма представления мо- жет быть символьная или графическая (временные диаграммы сигналов). Входные каналы ЛА подключаются к точкам контроля с помощью зондов- клипсов или соединителей. Число каналов в современных ЛА обычно со- ставляет от 16 до 150. Запуск анализатора производится автоматически при поступлении на определенные каналы заданного кода (адреса, данных или комбинации управляющих сигналов) или последовательности кодов. После запуска в память ЛА записывается последовательность значений логических
сигналов временной оси (глубину контроля), которое, для большинства ЛА составляет от 2 К до 32 К. На экран выводятся несколько десятков точек для каждого канала с возможностью просмотра всей записанной в памяти после- довательности состояний. Максимальная частота дискретизации временных интервалов для различных моделей ЛА имеет значение от 20 до 200 МГц.
ЛА реализуются в виде автономных измерительных приборов или плат расширения, подключаемых к базовому (host) персональному компьютеру. Эти приборы часто включают ряд дополнительных устройств, например программируемый генератор тестовых последовательностей. ЛА, реализованные в виде автономных приборов, выпускаются рядом ведущих производителей электронно-измерительной аппаратуры: Tektronix, Hewlett- Packard, John Fluke и др. Наиболее широко при отладке систем используются ЛА типов 16500В (Hewlett-Packard), 3001GPX и 3002GPX (Tektronix), PM3580 (Fluke), CLAS 4000 (Embedded Performance/Biomation). Их стоимость составляет несколько тысяч долларов.
Чтобы обеспечить разработчиков недорогими средствами контроля состояния системы, ряд производителей выпускает анализаторные платы, подключаемые к базовому персональному компьютеру, который программируется на выполнение значительной части функций ЛА. При этом для хранения последовательности состояний используется память базового компьютера, визуализация временных диаграмм в символьной или графической форме выполняется на дисплее его монитора, можно выполнить распечатку результатов измерений на принтере. Базовый компьютер управляет процессом измерения и производит обработку результатов. Благодаря этому анализаторная плата оказывается достаточно простой и на порядок более дешевой, чем автономный ЛА.
В качестве примера можно привести анализаторную плату, разработанную и поставляемую лабораторией "Моторола - Микропроцессорные системы" Московского государственного инженерно- физического института (МИФИ). Плата имеет следующие параметры:
размеры 200 х 110 мм; число входных каналов 8;
глубина буферной памяти 2 Кбайт/канал (до 2048 контрольных точек); частота дискретизации до 40 МГц;
потребляемая мощность не более 1 Вт.
Анализаторная плата включается в соединитель расширения материн- ской платы базового компьютера типа IBM PC, внешние усилители- формирователи сигналов и зонды присоединяются к ней плоским кабелем. Последовательность логических состояний представляется на экране в виде диаграмм или шестнадцатеричных кодов. На экране отображается также па- нель управления анализатора. Предварительная настройка прибора (задание типа запуска, порогового уровня входного сигнала и др.) производится с кла- виатуры базового компьютера. Плата служит дешевым и эффективным сред- ством отладки 8-разрядных микропроцессорных и микроконтроллерных сис- тем.
2. Схемные эмуляторы
Схемный эмулятор (СЭ) представляет собой программно-аппаратный комплекс, который в процессе отладки замещает в реализуемой системе мик- ропроцессор или микроконтроллер. В результате такой замены функциони- рование отлаживаемой системы становится наблюдаемым и контролируе- мым. Разработчик получает возможность визуального контроля за работой системы на экране дисплея и управления ее работой путем установки опре- деленных управляющих сигналов и модификации содержимого регистров и памяти. Благодаря наличию таких возможностей СЭ является наиболее уни- версальным и эффективным отладочным средством, используемым на этапе комплексной отладки системы.
Наиболее широкое применение получили СЭ, подключаемые к базовому управляющему компьютеру типа IBM PC или рабочей станции. Обычно такие СЭ конструктивно оформлены в виде прибора, размещенного в отдельном корпусе с автономным источником питания и соединенного с последовательным СОМ-портом базового компьютера. Некоторые типы эмуляторов для ускорения обмена связываются с компьютером через параллельный порт.
С помощью плоского кабеля к СЭ подключается эмуляторная головка, которая имеет вилку для включения в систему вместо эмулируемого микропроцессора или микроконтроллера. В головке размещается эмулирующий микропроцессор (микроконтроллер), который выполняет те же функции, что и эмулируемый, но работает под управлением компьютера. Большинство СЭ предназначено для работы с определенным семейством микропроцессоров (микроконтроллеров), причем для эмуляции каждой модели семейства используется соответствующая головка.
В структуру СЭ входят следующие блоки:
эмулятор микропроцессора или микроконтроллера (размещается в эму-ляторной головке);
память трассы, которая хранит значения сигналов, устанавливаемых на выводах микропроцессора (микроконтроллера) в процессе выполнения программы;
блок контрольных прерываний, который реализует остановы в кон- трольных точках, заданных пользователем с клавиатуры компьютера;
эмуляционная память (ОЗУ), которая заменяет в процессе отладки внутреннее ПЗУ микроконтроллеров или другие разделы памяти, внешний доступ к которым в процессе отладки ограничен;
таймер, используемый для контроля времени выполнения отлаживае- мых фрагментов программы.
СЭ позволяет вводить в систему тестовую или рабочую программу и контролировать ее выполнение, обеспечивая прерывания в контрольных точ- ках. Условиями прерывания могут быть различные комбинации значений ад- реса, данных и управляющих сигналов, поступающих на выводы эмулирую- щего микропроцессора или микроконтроллера. Эти комбинации задаются пользователем с клавиатуры управляющего компьютера. После останова пользователь может получить на экране полную информацию о текущем со-
стоянии любых регистров и ячеек памяти системы. С помощью памяти трас- сы можно просмотреть состояния системной шины для определенного количества предыдущих циклов выполнения программы. Дисассемблер дает возможность анализировать выполнение программы в соответствии с ее исходным текстом на языке Ассемблера.
Память трассы работает почти аналогично памяти ЛА, поэтому СЭ может выполнять также его функции. Число устанавливаемых контрольных точек обычно составляет несколько десятков, хотя некоторые модели совре- менных СЭ обеспечивают существенно большие возможности (см. табл. 1). Объем памяти трассы в различных СЭ позволяет контролировать от 4 К до 512 К программных циклов. Таймер служит для определения времени вы- полнения фрагментов программы с учетом реальной тактовой частоты сис- темы.
Программное обеспечение СЭ состоит из монитора - служебной про- граммы, обеспечивающей работу всех блоков под управлением базового ком- пьютера, компилятора или ассемблера, позволяющих программировать рабо- ту системы на языке высокого уровня или ассемблера и отладчика. Данные программные средства обычно функционируют в составе интегрированной среды проектирования-отладки. Большинство современных СЭ используют символьные отладчики и дисассемблеры, применение которых делает про- цесс отладки более простым и наглядным. Программное обеспечение СЭ реализует в процессе отладки выдачу данных на экран монитора в удобном для пользователя многооконном формате.
Многие типы СЭ содержат эмуляционное ОЗУ, которое заменяет ПЗУ отлаживаемой системы. Благодаря такой замене можно в процессе отладки производить оперативное изменение содержимого этой памяти. После отлад- ки содержимое эмуляционного ОЗУ переносится в рабочее ПЗУ системы.
Некоторые модели СЭ предоставляют возможности анализа эффективности выполняемой программы, обеспечивая информацию о частоте обращения к определенным ее фрагментам, и позволяют производить отладку мультипроцессорных систем с помощью организации многоэмуляторных комплексов.
СЭ, реализующие набор перечисленных выше функций, называют от- ладочными комплексами или системами развития (development system). Та- кие комплексы выпускаются для различных семейств фирмой Motorola (MMDS05, MMDS11, CDS32, см. табл. 1) и рядом других производителей.
В табл. 1 приведены основные характеристики наиболее распростра- ненных зарубежных моделей СЭ, которые используются для комплексной отладки систем, реализуемых на базе микропроцессоров и микроконтролле- ров фирмы Motorola. Данные СЭ обладают широким набором функциональ- ных возможностей и имеют стоимость порядка нескольких тысяч долларов. Например, эмулятор типа Flex-ICE фирмы Noral Micrologics имеет цену 10 000 долл.
Таблица 1.1. Схемные эмуляторы для отладки систем на базе микро- процессоров и микроконтроллеров фирмы Motorola
|
Производитель, тип |
Семейство МП или МК |
Объем памяти (трассы, эму- ляции) |
Число кон- трольных то- чек |
Базовый ком- пьютер |
|
Motorola MMDS 05 MMDS 11 CDS 32 |
68НС05 68НС11 683хх |
64 К (эм.) 64 К (эм.) 8 К (тр.), 1 М (эм) |
64 128 4 |
IBM PC, PS/2 IBM PC, PS/2 IBM PC, PS/2 |
|
Hevlett-Packard HP 6470 (серия) |
680х0 683хх |
До 256 К (тр.) До 8М (эм.) |
Не ограничен- но |
IBM PC, PS/2 SPARC HP9000 |
|
Applied Microsstems EL 1600 EL 3200 Code ICE Code TAP-XA |
68000, 68302 68330, 340, 360 68030, 040, 060 68331, 332 |
- |
- |
IBM PC, PS/2 SPARC |
|
Huntsvill Microsystems HMI-200-xx (серия) LITE-68HC16 LITE- 68300 |
68НС11, 68НС16 68х0, 683хх МРС860, МРС805 68НС16 653 хх |
До 8 К (эм.) До 4М (эм.) 4 К (тр.), 256 К (эм.) 4 К (тр.), 256 К (эм.) |
4 4 4 |
IBM PC SPARC IBM PC SPARC |
|
Microtek International MICE-III MICEpack PowerPack |
680х0, 68302 68306, 307, 328 683хх, 68НС16 |
1М (эм.) 128 К (тр.), до 8М (эм.) 128 К (тр.), до 8М (эм.) |
8+8 8+8 |
IBM PC IBM PC IBM PC |
|
Lauterbach Datentechnik TRACE-32 |
Все типы |
До 4М (тр.) До 16М (эм.) |
Не ограничен- но |
IBM PC SPARC DEC VAX, DEC ALPHA, HP 9000 |
|
EST TRACE 16 TRACE 32 vision ISE |
68HC16 683xx 683xx, MPC860 MCF5xxx |
32 K (тр.) 32 К (тр.) До 128 К (тр.) |
64 |
IBM PC SPARC HP 9000 |
|
Pentica Systems MIME 600 MIME 700 MIME 800 |
68HC16 68HC16, 683xx 683xx |
8 K (тр.) 32 К (тр.), до 2 М (эм.) 512 К (тр.), до 5 М (эм.) |
He ограничено He ограничено He ограничено |
IBM PC IBM PC IBM PC, SPARC IBM PC |
|
Hitex teletest 32 AX68300 AX 6811 |
68000, 6808, 68100, 683ххх 683ххх 68НС11 |
32 К (тр.), до 52 М (эм.) До 8К (тр.), до 152 М (эм.) 32 К (тр.) |
20 256 |
|
|
Nohau EMUL68 – PC EMUL68 – PC EMUL68 - PC |
68НС11 68НС16 683хх |
16 К (тр.) 512 К (тр.), до 4 М (эм.) 512 К (тр.), до 4 М (эм.) |
|
IBM PC SPARC HP 9000 |
|
Meta link ice Master-68HC05 ice |
68НС05 68НС11 |
4 К (тр.), 56 К (эм) 4 К (тр.), |
56 K 64 K |
IBM PC |
|
Master-68HC11 |
|
64 К (эм) |
|
|
|
Wytec WICE 68HC11XX (серия) |
68НС11 |
64 К (эм) |
64 K |
IBM PC |
Noral Micrologics 68020,030 32 К (тр.), 512 - IBM PC
К (эм.)
Кроме описанных сложно-функциональных и дорогих моделей СЭ ря- дом производителей выпускаются их упрощенные варианты, реализованные на одной печатной плате. Такие СЭ обладают ограниченными возможностя- ми: имеют существенно меньший объем памяти трассы, не реализуют функ- ции ЛА, не обеспечивают символьной отладки. Однако они позволяют вы- полнять отладку систем малой и средней сложности, имеют на порядок более низкую стоимость, поэтому находят достаточно широкое практическое при- менение. Некоторые типы плат развития, также выполняют часть функций СЭ.
Уникальной особенностью ряда моделей микропроцессоров и микро- контроллеров фирмы Motorola является реализация специального режима от- ладки BDM, который позволяет производить комплексную отладку систем без использования дорогостоящих СЭ. Для этого разработан ряд устройств, которые называются BDM- портами, BDM-отладчиками или эмуляторами. Фирма Motorola выпускает BDM-отладчики типа M68ICD16 для семейства М68НС16 и M68ICD32 для семейства М683хх. Фирма Nihau производит BDM-эмуляторы EMUL300-PC/BDM для семейства М683хх. Аналогичные BDM - эмуляторы серии 300 выпускаются фирмой EST. Для микропроцессо- ров MCF5202, MCF203 семейства Cold Fire разработаны BDM-эмуляторы MICE pack-J фирмы Microtel International, которые имеют память трассы ем- костью 32 Кбайт и обеспечивают обслуживание 256 контрольных точек ос- танова программы. BDM-порты BDMPort 68HC16 и BDMPort CPU32, выпус- каемые фирмой EST, позволяют подключаться к соответствующим выводам микроконтроллеров семейств М68НС16 и М683хх и выполнять отладку сис- тем, реализованных на их базе. Средства комплексной отладки, использую- щие режим BDM, реализуют значительную часть функций СЭ при значи- тельно меньшей стоимости.
Следует отметить, что ряд российских организаций имеет опыт разработки и выпуска оригинальных моделей СЭ, обеспечивающих достаточный набор функциональных возможностей при низкой стоимости. Такие СЭ производятся для ряда типов микропроцессоров и микроконтроллеров, выпускаемых фирмами Intel, Zion, Microchip. Если будет реализовано производство аналогичных СЭ для систем на базе микропроцессоров и микроконтроллеров фирмы Motorola, то российские разработчики аппаратуры будут иметь широкий выбор средств отладки, имеющих различную стоимость и функциональные возможности.
3. Эмуляторы ПЗУ
Данные устройства используются при отладке систем, рабочая про- грамма которых размещается в ПЗУ. Эмулятор ПЗУ содержит ОЗУ, которое подключается к системе вместо управляющего ПЗУ, и работает под управле- нием подключенного к эмулятору базового компьютера. В простейшем слу- чае эмулятор ПЗУ позволяет в процессе отладки выполнять многократное оперативное изменение рабочей программы. Окончательный вариант рабо- чей программы заносится в ПЗУ системы после отладки.
Типичным примером этого класса приборов является эмулятор ПЗУ типа EMD-256, выпускаемый Консультационно-техническим центром по микроконтроллерам (КТЦ-МК, Москва). Он предназначен для эмуляции микросхем ПЗУ типа 2756 емкостью 32 Кбайт, широко используемых в 8- разрядных микроконтроллерных системах. Эмулятор имеет размеры 77 х 46 мм и включается непосредственно в панельку ПЗУ, смонтированного в сис- теме, с помощью жесткого переходника или переходника, соединяемого с эмулятором плоским кабелем. Подключение к управляющему компьютеру производится через последовательный СОМ-порт. При обмене используется стандарт RS-232, скорость обмена 9600 бод. На плате эмулятора располагает- ся светодиодный индикатор, указывающий режим его работы (прием файла от компьютера или работа в составе системы), наличие ошибок при записи файла.
Эмулятор принимает файлы в формате Motorola S-Record, что позволяет использовать его при отладке систем на базе микроконтроллеров семейств М68НС05, М68НС08, М68НС11, и в Intel НЕХ-формате. Распознавание формата файлов производится автоматически. Управляющая программа эмулятора, загружаемая в компьютер с дискеты, обеспечивает запуск ассемблера, установку режима работы Сом-Порта, просмотр и редактирование содержимого файла, и его загрузку. Питание эмулятора производится напряжением 5 В, поступающим от непосредственно от отлаживаемой системы, потребляемый ток 23 мА. Стоимость эмулятора 75 долл.
Более сложные "интеллектуальные" эмуляторы ПЗУ имеют более ши- рокие функциональные возможности. Используя один из входов прерывания системы, они позволяют останавливать ее работу в заданных контрольных точках, аналогично схемному эмулятору. При этом на дисплее базового ком- пьютера может быть представлено содержимое эмулирующей памяти. В слу- чае использования в эмуляторе памяти трассы можно обеспечить просмотр предыдущих шагов обращения к ПЗУ, т.е. проверить последовательность вы- биравшихся команд. Во многих случаях такая информация является доста- точной для выполнения отладки микроконтроллерных систем. В качестве примера эмуляторов ПЗУ этого класса можно привести IDS/LC, выпускае- мый компанией Cactus Logic (США), который предназначен для отладки микроконтроллерных систем на базе семейства М68НС11.
В лаборатории "Моторола - Микропроцессорные системы" МИФИ разработан эмулятор ПЗУ типа RET, обеспечивающий эмуляцию памяти емкостью до 128 Кбайт (ЭППЗУ от 2 К х 8 до 128 К х 8, ППЗУ от 256 х 4 до 2
К х 4, ОЗУ от 2 К х 8 до 128 К х 8, ПЛИС 82S100/101) с временем выборки до
50 нс. Этот эмулятор ориентирован на отладку 8-разрядных микроконтроллерных систем, в том числе систем на базе семейств М68НС05, М68НС08, М68НС11. Эмулятор RET реализован на плате с размерами 60 х
80 мм, подключаемой к управляющему IBM-PC компьютеру через параллельный LPT-порт. В качестве дополнительных функций отладки систем обеспечивается пошаговый режим микроконтроллера и работа эмулятора в качестве логического анализатора с памятью трассы 64 К.
Таким образом, эмуляторы ПЗУ могут выполнить значительную часть функций схемных эмуляторов. При этом их реализация оказывается проще и дешевле, так как они не эмулируют функции микроконтроллера, который в процессе отладки продолжает работать в составе системы. Вследствие этого эмуляторы ПЗУ являются универсальными средствами, которые могут ис- пользоваться для отладки систем с различными моделями микроконтролле- ров.
4. Платы развития
Этот класс средств проектирования микропроцессорных и микрокон- троллерных систем является наиболее многочисленным. Условно их можно разделить на следующие типы:
системные комплекты (evaluation kit) - набор размещенных на плате аппаратных средств, достаточных для реализации несложных систем;
отладочные платы и системы (evaluation board, system) - размещенные на плате программно-аппаратные комплексы, обеспечивающие моделирова- ние и отладку систем различного назначения на базе определенных моделей микропроцессоров или микроконтроллеров;
целевые платы (target board) - программно-аппаратные комплексы, ориентированные на использование после отладки в качестве прототипной системы;
одноплатные компьютеры и контроллеры (single-board computer, con- troller) - конструктивные комплексы, предназначенные для использования в качестве базовых модулей при реализации целевых систем промышленного применения.
Эти средства могут использоваться для следующих целей:
изучение функционирования определенных моделей микропроцессоров и микроконтроллеров, получение навыков их практического применения;
тестирование и отладка программного обеспечения систем на реальных образцах микропроцессоров (микроконтроллеров);
комплексная отладка макета системы, используемого затем в качестве образца для реализации прототипной системы;
сборка и отладка прототипной или целевой системы, в состав которой входят платы развития в качестве базовых модулей.
Практически все типы плат развития содержат в своем составе порты для подключения, управляющего персонального компьютера. Чаще всего для этой цели используется последовательный обмен по стандарту RS-232. Ряд
типов отладочных и целевых плат имеют также отдельное поле для макети- рования пользователем дополнительных устройств с помощью проводного монтажа.
Ввиду большого разнообразия областей и способов применения но- менклатура выпускаемых плат развития очень широка и четкие границы ме- жду их типами отсутствуют. Во многих случаях отладочные платы могут ис- пользоваться в качестве целевых, а одноплатные компьютеры часто служат средствами отладки прототипных систем.
Рассмотрим отдельных типичных представителей этого класса средств проектирования - отладки.
Отладочные платы серии M68HC05EVM, производимые фирмой Mo- torola, служат для проектирования - отладки систем на базе семейства М68НС05. Ввиду большой номенклатуры этого семейства выпускается не- сколько типов таких плат для различных серий микроконтроллеров. Платы комплектуются соответствующими типами микроконтроллеров, эмуляцион- ной памятью емкостью 8 или 16 Кбайт, содержат резидентный отладчик, по- зволяющий выполнять отладку программ без использования, управляющего компьютера. Порты микроконтроллера выведены на внешние соединители платы, что дает возможность подключать к ней периферийные различные устройства. На плате расположен также программатор, который позволяет переписывать отлаженную программу в ПЗУ микроконтроллера, используемого в прототипной системе. Два отдельных последовательных порта типа RS-232 обеспечивают подключение к ней управляющего компьютера и монитора.
В режиме автономной отладки плата M68HC05EVM работает совместно с внешним монитором под управлением резидентного отладчика. При этом управление осуществляется с клавиатуры монитора, информация о состоянии системы выводится на экран его дисплея, отладка программы реализуется с помощью однострочного ассемблера-дисассемблера. При работе под управлением персонального компьютера может быть использован полный комплект программных средств проектирования-отладки.
Платы серии M68HC05EVM являются эффективным средством для практического освоения методов проектирования систем на базе семейства М68НС05. Эти средства позволяют изучить функционирование данных мик- роконтроллеров, получить навыки их программирования, освоить способы их применения в системах управления различными устройствами и процессами.
Для отладки систем на базе семейства М68НС11 фирма Motorola вы- пускает несколько серий отладочных плат, отличающихся набором функцио- нальных возможностей. Эти платы содержат резидентный монитор-отладчик BUFFALLO, который позволяет отлаживать системы с помощью внешнего монитора без участия, управляющего компьютера. На плате размещается ОЗУ пользователя емкостью 8 или 16 Кбайт. Имеется также последователь- ный порт для подключения управляющего компьютера с возможностью ис- пользования большого набора программных средств проектирования- отладки, разработанных для этого семейства, например, отладочного пакета
68S11SIMAB фирмы Motorola. Серия M68HC11EVM реализует функции, ко- торые для семейства М68НС05 обеспечивались описанными выше платами M68HC05EVM. Серия M68HC11EVB выполняет аналогичные функции, но не содержит программатора. Серия M68HC11EVBU имеет на плате макетное поле для проводного монтажа дополнительных устройств, необходимых в прототипной системе. Платы SHC11EVB2 позволяют подключать к системе дополнительную плату, реализующую функции ЛА с памятью трассы на 8 К точек. Плата M68EBLP11 имеет батарейное питание, макетное поле для мон- тажа дополнительных устройств и двухстрочный 14-позиционный жидкок- ристаллический дисплей, что позволяет на его основе реализовать автоном- ные портативные системы управления.
Российскими специалистами разработана отладочная плата ТЕТ- HC11EVB для макетирования и отладки систем на базе семейства М88НС11 (производитель - внедренческое предприятие ТЕТ, Зеленоград). Плата со- держит микроконтроллер МС68НС711Е9, эмуляционную память, последова- тельный порт стандарта RS-232 для подключения к управляющему компью- теру, макетное поле для реализации устройств пользователя. Обеспечивается работа системы в однокристальном или расширенном режиме. Плата исполь- зуется вместе с комплексом средств программирования (редактор, трансля- тор с языка Ассемблера, отладчик), работающих в составе интегрированной среды разработки. Чтобы обеспечить отладку систем на базе различных мо- делей микроконтроллеров семейств М68НС05, М68НС11, фирма Motorola выпускает двухпалатные модульные отладочные системы M68HC05xxEVS и M68HC11xxEVS. Эти системы имеют базовую плату PFB, используемую для всех моделей семейства, и платы эмуляционных модулей ЕМ, которые опре- деляют модель используемого микроконтроллера. Путем смены платы ЕМ, система настраивается на применение определенной модели. Данные систе- мы содержат также программатор, эмуляционное ОЗУ емкостью 16 или 64 Кбайт, и выполняют ряд функций СЭ, обеспечивая остановы в контрольных точках программы.
Аналогичные отладочные платы производятся фирмой Motorola для микроконтроллеров семейств М68НС16 (платы M68HC16Z1EVB) и М683хх (платы M68331EVK, M68332EVK). Кроме того, можно использовать для проектирования- отладки систем на базе этих семейств двухпалатную мо- дульную отладочную систему MEVB1632, которая настраивается на эмуля- цию различных моделей путем установки на базовую плату PFB соответствующего модуля ЕМ.
Для разработки систем на базе микропроцессоров семейства М680хО фирма Motorola выпускает интегрированную платформу разработки M68ECOXOIDP, которая содержит отладочную систему и комплект про- граммных средств. Отладочная система состоит из базовой платы и набора подключаемых к ней процессорных модулей, содержащих различные модели микропроцессоров данного семейства. Базовая плата содержит динамическое ОЗУ емкостью 2 Мбайт, ПЗУ емкостью 1 Мбайт с резидентным программ- ным обеспечением, панельку для подключения ПЗУ пользователя (I Мбайт),
два последовательных порта DUART (микросхема МС68681), параллельный интерфейс-таймер (микросхема МС68230), параллельный интерфейс Censor- ings, пять соединителей расширения для подключения устройств пользовате- ля. Резидентное программное обеспечение содержит ассемблер- дисассем- блер и отладчик, которые позволяют создавать прикладные программы сред- ней сложности. Для реализации более сложных программных комплексов используется кросс-система программирования, установленная на базовом компьютере.
Для проектирования систем на базе микропроцессоров PowerPC фир- мой Motorola разработана двухпалатная отладочная система СогеХ, которая состоит из базовой платы МРС60Х-СВ и подключаемого к ней процессорно- го модуля. Набор из трех процессорных модулей МРС60Х-РВ позволяет реа- лизовывать системы на базе микропроцессора МРС601, МРС603 или МРС604. Управляющий компьютер подключается к системе через последо- вательный порт стандарта RS-232. Система содержит динамическое ОЗУ ем- костью 8 Мбайт, два соединителя для подключения микросхем ЭСППЗУ ем- костью 256 Кбайт, соединители расширения для подключения внешних уст- ройств к системной шине, модуль ввода-вывода, реализованный на базе ком- муникационного контроллера МС68302. Этот модуль обеспечивает различ- ные виды интерфейса для связи с внешними устройствами непосредственно (последовательный RS-232, SPI, параллельный Censorings), или через коммуникационные сети (ISDN и др.). Для микропроцессоров МРС602, МРС603 разработана отладочная система Big Bend, подключаемая к шине PCI персонального компьютера. Система содержит ОЗУ емкостью 3.2 Мбайт, контроллеры дисководов, жесткого диска и CD-ROM, соединители для подключения устройств, использующих стандарт шины ISA, плату для подключения к сети Ethernet и ряд других устройств.
Различные типы плат развития для 16- и 32- разрядных микропроцес- соров и микроконтроллеров фирмы Motorola выпускаются также рядом дру- гих производителей отладочных средств. За последние годы в их числе поя- вились и российские разработчики. В лаборатории "Моторола - Микропро- цессорные Системы" МИФИ разработаны целевые платы для проектирова- ния-отладки систем на базе микроконтроллеров MC68HC16Z1 и МС68332. В процессе отладки микроконтроллер на плате работает в отладочном режиме BDM, обеспечивая функции эмулятора.
Плата M68332-DK содержит, кроме микроконтроллера, три панельки для включения микросхем памяти емкостью по 32 Кбайт, порт последова- тельного обмена по стандарту RS-232, соединители расширения для подклю- чения периферийных устройств. Память целевой платы может быть конфи- гурирована как 64 Кбайт ОЗУ и 32 Кбайт ПЗУ или наоборот. В режиме от- ладки плата работает под управлением персонального компьютера IBM PC, соединенного с ней через параллельный LPT-порт. Реализуется пошаговое выполнение программы или ее прогон с остановами в контрольных точках, при этом текущая информация представляется на дисплее компьютера с по- мощью многооконного интерфейса. Для отладки используется разработан-
ный в лаборатории отладчик DEBUG-32, который обеспечивает выдачу ин- формации о состоянии ресурсов системы, изменение содержимого регистров и ячеек памяти, представление выполняемой программы в мнемонической форме и ее модификацию. После отладки плата может отключаться от управ- ляющего компьютера и использоваться как автономный контроллер или в со- ставе более сложной прототипной системы. Серийное производство этих плат производится Консультационно-техническим центром по микрокон- троллерам (КТЦ-МК, Москва).
Плата M68HC16Z1-DK выполняет аналогичные функции, реализуя от- ладку систем на базе микроконтроллеров MC68HC16Z1 с помощью про- граммного отладчика DEBUG-16 с последующей работой в качестве авто- номного контроллера.
Для отладки систем на базе коммуникационных контроллеров фирма Motorola производит платы развития M68302FADS (для МС68302), M68360QUADS (для МС68360). Платы содержат ПЗУ с резидентным отлад- чиком, ОЗУ емкостью до 1 Мбайт, флэш-память емкостью до 1 Мбайт, по- следовательный порт RS-232, имеют соединители для подключения парал- лельного порта управляющего компьютера (IBM-PC или SUN) и логического анализатора. Плата M68360QUADS имеет дополнительный ведомый кон- троллер MC68EN360, обеспечивающий подключение к сети Ethernet, а также специальные соединители, которые соединены с выводами отладочных BDM-портов, имеющихся в составе контроллеров. Платы используются в ка- честве отладочных или целевых плат при разработке систем на базе этих контроллеров.
Достаточно большая номенклатура одноплатных компьютеров и кон- троллеров - SBC (single-board computer, controller) выпускается рядом фирм. Одной из ведущих в этой области является фирма Arenas (США), которая производит ряд типов SBC на базе семейств М680х0 и М683хх. Типичным примером является SBC68000 этой фирмы, который реализован на базе мик- ропроцессора MC68000 и содержит на плате: ОЗУ емкостью 64 или 128 Кбайт, служебное ПЗУ с записанным в нем резидентным отладчиком Tutor, последовательный двойной порт (DUART) типа МС68681, программируемый интерфейс-таймер (PIT) типа МС68230, контроллер дисковода, генератор тактовых импульсов и монитор шины. Один из последовательных портов в режиме отладки используется для подключения монитора или персонального компьютера. Стоимость платы около 400 долл.
В режиме автономной отладки SBC68000 работает под управлением резидентного отладчика Tutor, используя дисплей и клавиатуру подключен- ного монитора. С помощью монитора осуществляется ввод команд и данных, представляется текущее состояние ресурсов системы, обеспечивается работа однострочного ассемблера - дисассемблера. При подключении к SBC68000 управляющего персонального компьютера можно использовать более эффек- тивные средства программирования и отладки с применением макроассемб- лера или языка высокого уровня. После отладки программы SBC68000 может быть отключен от монитора или компьютера и работать в качестве автоном-
ной прототипной системы или выполнять функции локального контроллера при сохранении общего управления системой со стороны персонального компьютера.
Фирмой Arnos производятся также SBC на базе микропроцессоров МС68306, MCF5204 и контроллера МС68302. Эти платы имеют расширен- ный объем памяти (до 1...4 Мбайт). Их стоимость составляет 400...600 долл. Плата SBC360 содержит коммуникационный контроллер MC68EN360 и средства подключения к сети Ethernet. В платах SBC360EC и SBC603 для управления MC68EN360 используются микропроцессоры МС68ЕС040 и МРС603. Такие платы содержат память емкостью 4 Мбайт и выше, их стои- мость от 1000 до 2500 долл.
Различные серии SBC выпускаются также фирмами EST на базе МС68360, МС68341/349, МРС860, MCF5202), General Microsystems (на базе MC68030, MC68040, МС68060 совместно с МС68360, MCF5102), New Micros
(на базе МС68НС11, МС68НС16, МС68332) и рядом других производителей.
При разработке современных микропроцессорных и микроконтроллерных систем перспективным является использование мезонинной технологии. Для ее реализации рядом производителей выпускаются SBC, которые имеют несколько соединителей для включения мезонинных плат, обеспечивающих получение заданной целевой системы. Эти SBC выпускаются в модульном промышленном исполнении, что позволяет легко собирать различные конфигурации систем, монтируя необходимые модули. Для унификации интерфейса системные модули ориентированы на подключение к одной из стандартных общих шин, наиболее распространенной из которых является VMEbus. Отладка системы производится под управлением персонального компьютера, подключаемого к последовательному порту SBC, или с помощью резидентного монитора- отладчика. Отлаженная система может функционировать автономно или с участием управляющего компьютера. Рассмотрим основные характеристики типичных SBC-модулей для реализации мезонинной технологии создания целевых систем, которые выпускаются рядом ведущих зарубежных фирм.
Несколько серий SBC-модулей выпускается фирмой Motorola. Наибо- лее распространенными из них являются SBC серии MVME162, реализован- ные на базе микропроцессоров MC68040 или МС68ЕС040. Различные типы SBC этой серии имеют объем динамического ОЗУ от 1 до 64 Мбайт, статиче- ского ОЗУ от 256 до 512 Кбайт (с батарейным питанием), ЭППЗУ и флэш- память объемом до 2 Мбайт, от двух до четырех последовательных портов RS-232, шесть 32-разрядных таймеров. Кроме того, SBC различаются нали- чием или отсутствием интерфейсов VMEbus, SCSI, Ethernet. На плате могут устанавливаться до четырех мезонинных модулей стандарта IP, которые со- держат различные периферийные, коммуникационные и другие устройства. SBC содержат резидентный монитор-отладчик 162Bug и могут функциони- ровать под управлением ряда ОС реального времени: OS-9, VxWorks, LynxOS и др. SBC-модули MVME1603, MVME1604, реализованные на базе PowerPC микропроцессоров МРС603, МРС604, содержат на плате динамиче-
ское ОЗУ емкостью от 8 до 128 Мбайт, два последовательных порта, интер- фейс с шиной PCI, контроллер шины SCSI-2, интерфейс с сетью Ethernet, графический адаптер SVGA, контроллеры клавиатуры и манипулятора "мышь", а также позицию для мезонинного модуля стандарта РМС. Новые семейства SBC-модулей MVME2600, MVME3600, использующие RISC- микропроцессоры МРС603 и МРС604, имеют ОЗУ емкостью до 1 Гбайт и расширенные возможности подключения периферийных устройств с различ- ными интерфейсами.
Большую номенклатуру SBC-модулей с интерфейсом VMEbus выпус- кает фирма Green Spring Computers (США). Модули VIPC64, VIPC65, VIPC75 реализованы на базе микропроцессоров MC68020, МС68ЕСОЗО, содержат двухпортовое динамическое ОЗУ емкостью от 1 до 4 Мбайт, флэш-память до 1 Мбайт, два последовательных порта RS-232, один 16-разрядный таймер. На их платах имеются две позиции для IP-мезонинов. Модули семейства SBC1-5 этой фирмы не содержат позиций для мезонинов. Они используют в качестве базовых микропроцессоры МС68НСОО, MC68020, МС68ЕСОЗО, имеют объем ОЗУ от 256 Кбайт до 4 Мбайт, объем ЭППЗУ от 128 Кбайт до 2 Мбайт. Фирма Green Spring производит также большой набор мезонинных IP- модулей. Среди них коммуникационные IP-модули IP-Comm 302-PGA и IP- Comm 360, реализованные на базе контроллеров МС68302 и МС68360, кото- рые подключаются при необходимости организации обмена по различным каналам связи.
Фирма BVM (Великобритания) выпускает ряд типов SBC-модулей с интерфейсом VMEbus (рис. 1). Модули BVME4000 и BVME6000, реализо- ванные на базе микропроцессоров MC68040 и МС68060, содержат на плате шесть позиций для IP-мезонинов, динамическую память емкостью до 32 Мбайт, флэш-память емкостью до 16 Мбайт, имеют интерфейсы SCSI и Ethernet. Модуль BVME3000 содержит коммуникационный контроллер MC68EN360, два дополнительных последовательных порта, до 16 Мбайт ди- намического ОЗУ, 1 или 2 Мбайт флэш-памяти, 512 Кбайт статическое ОЗУ с батарейным питанием, четыре позиции для IP-мезонинов. Аналогичные ха- рактеристики имеет модуль RP3000, но без интерфейса VMEbus. Модули BVME390/395 (на базе МС68ЕС040/МС68040) и BVME370/380 (на базе
МС68ЕСОЗО/ MC68030) имеют двухпортовое динамическое ОЗУ емкостью до 32 Мбайт, 128 Кбайт ЭСППЗУ, параллельный принтерный порт, два последовательных порта. Эти модули не содержат позиций для мезонинов. В коммуникационном SBC - модуле RP2000 (на базе МС68302) отсутствует ин- терфейс VMEbus. На его плате располагаются статическое ОЗУ емкостью до 512 Кбайт, ЭППЗУ емкостью 512 Кбайт, два последовательных порта с оп- тоизолированными выходами, две позиции для мезонинных IP-модулей. В числе других мезонинных модулей фирмой BVM выпускается коммуникаци- онный модуль IP-302 на базе контроллера МС68302.

Рисунок 1. Плата-носитель SBC и мезонинные IP-модули
SBC-модули VM42 (на базе MC68040) и VM62 (на базе МС68060) фирмы PEP Modular Computers (Германия) отличаются тем, что содержат на плате также коммуникационный контроллер МС68360. На плате модулей размещаются статическое ОЗУ емкостью 256 Кбайт или 1 Мбайт, двухпортовое ОЗУ емкостью 128 Кбайт, интерфейс с VMEbus, позиции для подключения мезонинных модулей, которые обеспечивают увеличение объема ОЗУ до 16 Мбайт, введение флэш-памяти емкостью до 4 Мбайт, реализацию подключения к сети Ethernet и ряд других функций. SBC - модуль ШС-32 этой фирмы реализован на базе контроллера МС68360 или MC68EN360 и содержит также статическое ОЗУ емкостью 256 Кбайт или 1 Мбайт, шесть последовательных портов (четыре обеспечиваются с помощью мезонинов), позиции для включения мезонинов. Модуль VSBC-32 отличается от, ШС-32 наличием интерфейса VMEbus.
Имеющийся набор разнообразных плат развития помогает разработчику спроектировать и отладить макет или опытный образец системы, а в ряде случаев позволяет собрать рабочую систему из готовых модулей. При проектировании сложно-функциональных систем целесообразно использовать серийно выпускаемые SBC и периферийные различные модули, ориентированные на мезонинную технологию. Стандартизация этих изделий, их широкая номенклатура и высокие технические характеристики позволяют достаточно быстро собирать на их основе системы различного назначения. Для таких SBC и модулей имеется достаточно развитое программное обеспечение, что также упрощает и ускоряет создание системы, готовой для применения в реальных условиях. Поэтому платы развития, реализующие мезонинную технологию, наиболее перспективны для построения сложно-функциональных целевых систем.
Скачано с www.znanio.ru


































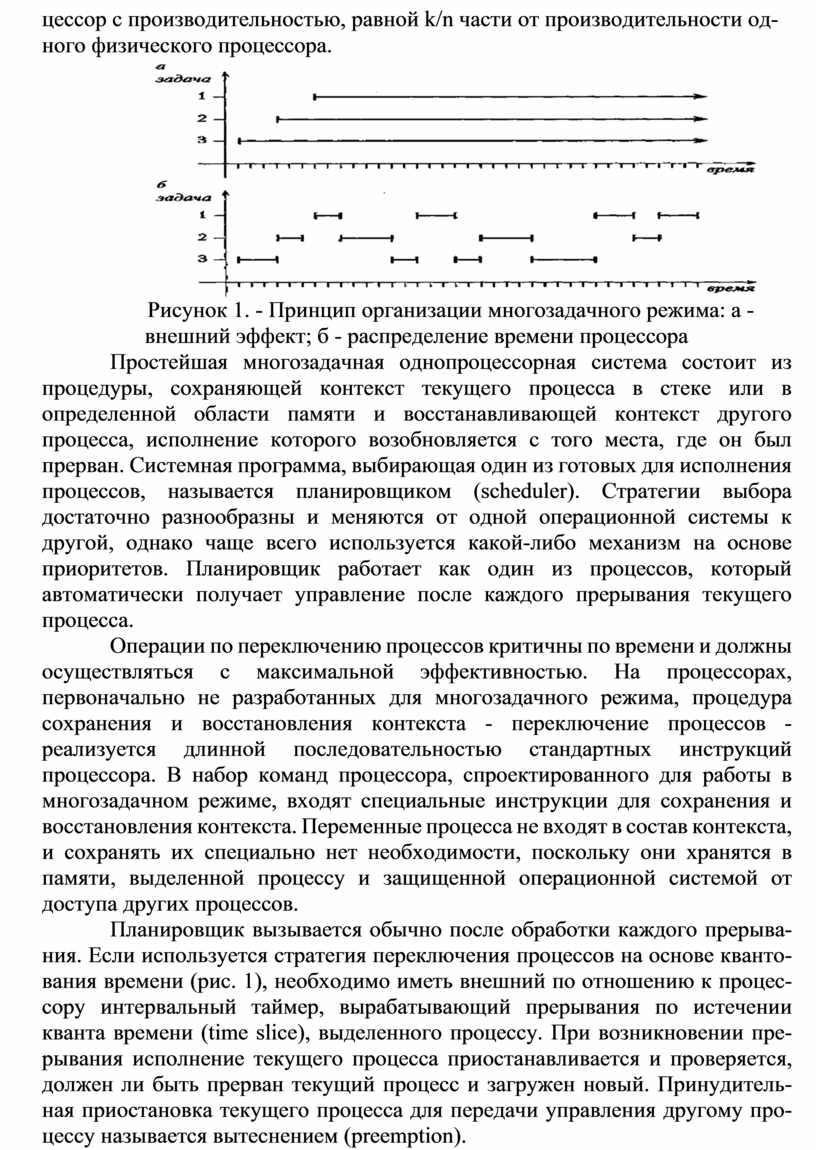
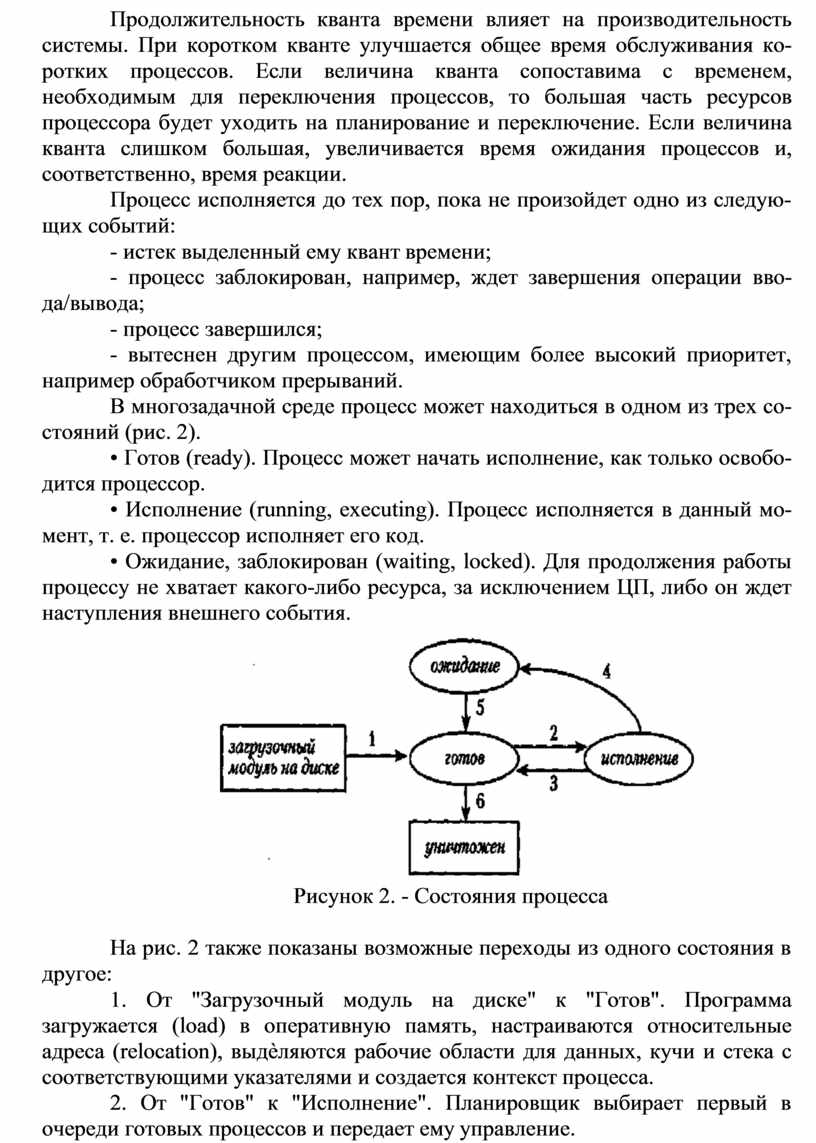




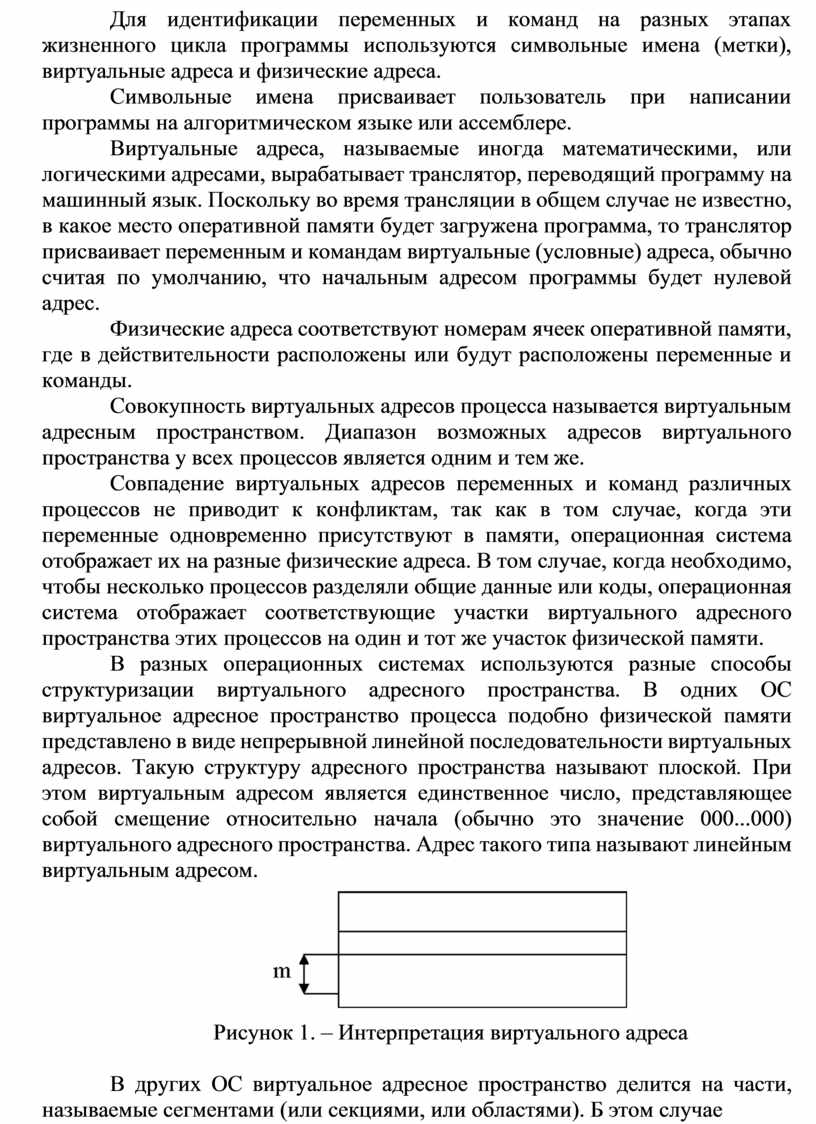

Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.