ВВЕДЕНИЕ
Основы автоматизации производства является общепрофессиональной дисциплиной, устанавливающей базовые знания для освоения профессионального модуля ПМ.03. Сборка, регулировка и ремонт контрольно-измерительных приборов и систем автоматики.
В результате освоения дисциплины обучающийся должен уметь:
производить настройку и сборку простейших систем автоматизации;
использовать в трудовой деятельности средства механизации и автоматизации производственного процесса.
В результате освоения дисциплины обучающийся должен знать:
- основы техники измерений;
- классификацию средств измерений;
- контрольно-измерительные приборы;
- основные сведения об автоматических системах регулирования;
- общие сведения об автоматических системах управления
Профессиональные компетенции, формируемые в результате освоения дисциплины:
ПК2.1. Принимать в эксплуатацию отремонтированное электрооборудование и включать его в работу.
ПК2.2. Производить испытания и пробный пуск машин под наблюдением инженерно-технического персонала.
ПК2.3. Настраивать и регулировать контрольно-измерительные приборы и инструменты.
7 пр МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ПО ВЫПОЛНЕНИЮ ЛАБОРАТОРНЫХ И ПРАКТИЧЕСКИХ РАБОТ
ПО ОП.06. ОСНОВЫ АВТОМАТИЗАЦИИ ПРОИЗВОДСТВА
15.01.20. Слесарь по контрольноизмерительным приборам и автоматике.
для студентов профессии
СОДЕРЖАНИЕ
Введение.
Практические занятия
1.
1.1. Практическое занятие №1. Расчет погрешности средств
измерения.
1.2. Практическое занятие №2. Составление простейшей схемы
автоматизации.
1.3. Практическое занятие №3. Измерения сопротивления с
помощью мостов постоянного тока.
1.4. Практическое занятие №4. Измерения индуктивностей и
емкостей с помощью мостов переменного тока
1.5. Практическое занятие №5. Измерения электрических величин
компенсационным методом в цепях постоянного тока
1.6. Практическое занятие №6. Исследование режимов работы и
методов расчета линейных цепей постоянного тока с одним
источником питания.
1.7. Практическое занятие №7. Составление функциональной
2.
схемы автоматического управления по отклонению.
Критерии оценок выполнения лабораторных и практических
работ.
Заключение.
Список рекомендуемой литературы.
3
5
9
12
16
19
26
30
36
37
37
1ВВЕДЕНИЕ
Основы автоматизации производства является общепрофессиональной
знания для освоения
дисциплиной,
профессионального модуля ПМ.03. Сборка, регулировка и ремонт
контрольноизмерительных приборов и систем автоматики.
устанавливающей базовые
В результате освоения дисциплины обучающийся должен уметь:
производить настройку и сборку простейших систем автоматизации;
использовать в трудовой деятельности средства механизации и
автоматизации производственного процесса.
В результате освоения дисциплины обучающийся должен знать:
основы техники измерений;
классификацию средств измерений;
контрольноизмерительные приборы;
основные сведения об автоматических системах регулирования;
общие сведения об автоматических системах управления
Профессиональные компетенции, формируемые в результате освоения
в
эксплуатацию
отремонтированное
Принимать
дисциплины:
ПК2.1.
электрооборудование и включать его в работу.
ПК2.2.
инженернотехнического персонала.
ПК2.3.
и инструменты.
Производить испытания и пробный пуск машин под наблюдением
Настраивать и регулировать контрольноизмерительные приборы
Практические работы важнейшая составная часть обучения основам
автоматизации производства, направленная на гармоничное развитие личности
студента. Они имеют большое теоретическое и практическое значение.
Основной целью практических работ является углубление и закрепление
знаний, полученных на теоретических занятиях по основам автоматизации
производства. Практические занятия должны вооружить студентов
практическими навыками исследования, расчета и контроля.
Методические указания по выполнению практических работ по основам
автоматизации производства разработаны в соответствии с рабочей
программой дисциплины.
Содержание методических указаний по выполнению практических работ
соответствует требованиям
по основам автоматизации производства
Федерального государственного стандарта среднего профессионального
образования.
По учебному плану в соответствии с рабочей программой на изучение
2основ автоматизации производства обучающимися предусмотрено
аудиторных занятий 32 часа, из них практических занятий – 14 часов.
Пособие включает 7 практических занятий по 2 академических часа. 14
часов, отведенных по рабочей программе согласно тематического
планирования, для практических работ по темам курса основы автоматизации
производства. Каждое практическое занятие содержит сведения о цели ее
проведения, о необходимых для проведения работы материалах, приборах,
инструментах, приспособлениях; включает описание работы и нормативные
данные об испытуемых материалах.
К выполнению практических работ студенты приступают после
подробного изучения соответствующего теоретического материала и техники
безопасности. Перед проведением практической работы необходимо
ознакомиться с устройством оборудования и приборов, ознакомиться с
правилами обращения с ними. При проведении испытаний необходимо
соблюдать правила техники безопасности. Нельзя без разрешения
преподавателя включать рубильники и пускатели, приводить в действие
лабораторные машины и оборудование, использовать реактивы не по
назначению.
После окончания занятий студенты приводят в порядок лабораторное
оборудование и рабочее место. В процессе выполнения практической работы
и после окончания ее студент должен показать преподавателю полученные им
опытные результаты и вытекающие из них выводы. После утверждения
преподавателем указанных результатов и выводов каждый студент оформляет
отчет по работе, который представляется на проверку и подпись
преподавателю в тот же день либо на следующем лабораторном занятии.
1.
Правила техники безопасности.
Прежде чем приступать к выполнению лабораторной работы,
необходимо:
1. Пройти инструктаж по ТБ и ПР и расписаться в специальном журнале.
2. К выполнению практических работ допускаются студенты прошедшие
противопожарный инструктаж и проверку знаний требований ТБ на
рабочем месте и при наличии их подписи в Журнале регистрации
инструктажа.
3. Занятия со студентами по выполнению практических работ проводятся в
помещениях учебных лабораторий с наличием электроприборов,
электроустановок и оргтехники, отвечающим требованиям пожарной
безопасности.
В лаборатории запрещается:
1. Выполнять операции на оборудовании и стендах с неисправностями,
которые могут привести к пожарам.
2. Переносить включенные электроприборы.
3. Ремонтировать электроприборы самостоятельно.
34. Загромождать свое рабочее место одеждой и другими вещами, не
относящимися к работе.
Студенты обязаны:
1. Соблюдать требования ТБ и ПБ и поддерживать противопожарный
режим, установленный в лаборатории.
2. Знать места нахождения средств пожаротушения, самоспасения,
пожарной сигнализации и оповещения о пожаре.
3. Знать пути безопасной эвакуации в случае пожара.
Практическое занятие №1
Тема: Расчет погрешности средств измерения.
Оборудование: тетрадь, ручка, мультимедийный проектор.
Цель работы: Научиться рассчитывать погрешности при измерениях.
1.1. Основные сведения
Погрешности прямых измерений Погрешность измерений – это
отклонение результата измерений от истинного значения измеряемой
величины. По способу выражения различают абсолютную, относительную и
приведенную погрешности измерения.
Абсолютная погрешность
равна разности между результатом измерения
и истинным значением измеряемой величины, выраженная в единицах
измеряемой величины
. (1.1)
Относительная погрешность d представляет собой отношение абсолютной
погрешности измерения к измеренному значению измеряемой величины,
выраженное в процентах
Приведенная погрешность – это отношение абсолютной погрешности к
нормирующему значению прибора
. (1.2)
. (1.3)
Согласно ГОСТ 8.40180 средствам измерений присваивают определённые
классы точности. Классы точности выражаются одним числом, выражаемым
из ряда 1∙10n; 1,5∙10n; 2∙10n; 2,5∙10n; 4∙10n; 5∙10n; 6∙10n, где n = 1; 0; 1; 2 и т. д.
Классом точности средств измерения называется обобщенная его
определяемая пределами допускаемых основной
характеристика,
4погрешности и погрешностей, названных изменением значений влияющих
величин.
Большинству аналоговых электроизмерительных приборов присваивается
определяемый основной наибольшей допустимой
класс точности,
приведенной погрешностью
, (1.4)
– предел допустимой максимальной абсолютной погрешности
где
измерения.
У приборов, класс точности которых выражается одним числом, основная
приведенная погрешность прибора в рабочем диапазоне рабочей шкалы,
выраженная в процентах, не должна превышать значения, соответствующего
класса точности.
Косвенные измерения. Это измерения, при которых искомое значение
находят на основании известной зависимости между этой
величины
величиной и величинами
,
,… ,
определяемыми прямыми
измерениями, т. е.
Очевидно, что абсолютная погрешность измеряемой величины
является функцией абсолютных погрешностей прямых измерений
.
В простейшем случае для одной переменной
в результате
измерения получим
Разложим правую часть в ряд Тейлора и сохраним члены разложения,
содержащие
в первой степени:
.
,отсюда абсолютная погрешность
имеет вид:
Относительная погрешность
определяется выражением
.
5В общем случае для функции
абсолютную
погрешность результата косвенных изменений определяют выражением
относительную
Пример. Записать формулу для расчета абсолютной погрешности
косвенного измерения мощности постоянного тока по показаниям
амперметра I и вольтметра U
.
1.2. Задание
1. Собрать электрическую цепь по схеме рис. 1.1.
2. Снять показания приборов при двух значениях нагрузки, указанных
преподавателем.
3. По результатам измерений вычислить относительную погрешность
формуле (1.2),
формулы (1.4).
приняв абсолютную погрешность максимальной
по
из
Рис. 1.1. Схема косвенного измерения параметров электрической цепи
4. Результаты измерений и вычислений занести в табл. 1.1.
5. Рассчитать полное Z , активное R и реактивное XC сопротивления,
коэффициент мощности cos j, полную S и реактивную Q мощности по
показаниям амперметра, вольтметра и ваттметра.
66. Записать расчётные формулы и результаты расчётов абсолютной ∆A и
относительной δ погрешностей, воспользовавшись результатами расчётов
табл. 1.1. Результаты вычислений занести в табл. 1.2. Таблица 1.1
Результаты расчётов и исходные данные
Наименование
прибора
Класс точнос
ти прибора, %
Предел измерения
прибора,А, В, Вт
Показание при
бора, А, В, Вт
Амперметр
Вольтметр
Ваттметр
, А, В,
Вт
,%
Таблица
1.2
Результаты расчетов
Погрешности косвенных измерений
Результаты
Расчётные
формулы
расчетов
δ, %
DA
DA
δ, %
Параметры электрической цепи
Наименование Расчетная
формула
Результаты
расчётов
S
Q
Контрольные вопросы
1. Какие виды погрешностей измерения вы знаете:
– по способу числового выражения;
– в зависимости от источника возникновения;
– по закономерности проявления?
2. Как устанавливаются классы точностей для различных типов средств
измерений?
3. Определить класс точности миллиамперметра с пределом измерения 0,5
мА для измерения тока 0,1 ... 0,5 мА так, чтобы относительная погрешность
измерения тока не превышала 1 %.
Вывод:
7Практическое занятие №2
Тема: Составление простейшей схемы автоматизации.
Цель работы: получить практические навыки в составлении простейших схем
автоматизации.
Оборудование: тетрадь, ручка, карандаш, линейка, мультимедийный
проектор.
Выполнение работы: Основные сведения.
При разработке схем автоматизации в целях сокращения чертежных работ и
обеспечения идентичности в изображении санитарнотехнического
оборудования и приборов автоматики следует пользоваться условными
графическими изображениями, приведенными в соответстующих ГОСТах.
При разработке проекта автоматизации в первую очередь необходимо решить,
с каких мест те или иные участки объекта будут управляться, где будут
размещаться пункты управления, операторские помещения, какова должна
быть взаимосвязь между ними, т. е. необходимо решить вопросы выбора
структуры управления. Под структурой управления понимается совокупность
частей автоматической системы, на которые она может быть разделена по
определенному признаку, а также пути передачи воздействий между ними.
Графическое изображение структуры управления называется структурной
схемой. Хотя исходные данные для выбора структуры управления и ее
иерархии с той или иной степенью детализации оговариваются заказчиком при
выдаче задания на проектирование, полная структура управления должна
разрабатываться проектной организацией.
Выбор структуры управления объектом автоматизации оказывает
существенное влияние на эффективность его работы, снижение относительной
стоимости системы управления, ее надежности, ремонтоспособности и т.д.
В самом общем виде структурная схема системы автоматизации
представлена на рис.1. Система автоматизации состоит из объекта
8автоматизации и системы управления этим объектом. Благодаря
определенному взаимодействию между объектом автоматизации и системой
управления система автоматизации в целом обеспечивает требуемый
результат функционирования объекта, характеризующийся параметрами х1,
х2, ..., хn.
например,
К этим параметрам можно отнести,
величины,
характеризующие целесообразный конечный продукт технологического
процесса, отдельные параметры, определяющие ход технологического
процесса, его экономичность, обеспечение безаварийного режима и т.д.
Кроме этих основных параметров, работа комплексного объекта
автоматизации характеризуется рядом вспомогательных параметров y1, y2,...
yi, которые также должны контролироваться и регулироваться (например,
поддерживаться постоянными). К такого рода параметрам можно отнести,
например, величины, характеризующие работу установок подготовки
технологического пара, насосных станций оборотного водоснабжения и т. д.
Рис. 1. Структурная схема системы автоматизации
Элементом автоматики называется часть устройства автоматической
системы, которая выполняет самостоятельные функции в качественных или
количественных преобразований физических величин.
9а)
без возмущающего воздействия;
б) с внешним возмущающим воздействием
Точка автоматической системы или устройства, к которой приложено
рассматриваемое воздействие, называется Входом x(t), а та точка, в которой
наблюдается эффект, вызванный рассматриваемым воздействием
– Выходом y(t). F(t) называется Внешним воздействием т. е. воздействие
внешней среды, а под Внутренним понимается воздействие одной части
автоматической системы на другую в системе автоматического управления.
Возмущающим считают воздействие, которое не предусмотрено алгоритмом
управления. На практике возмущающие воздействие ухудшает или нарушает
работу системы автоматического управления.
Простые и сложные средства автоматики состоят из отдельных связанных
между собой элементов. Программное управление – это, алгоритм
функционирования при котором выходная величина объекта изменяется по
заранее заданной программе. Различают системы с временным и
пространственным программным управлением (искусственный рассвет,
системы с программным управлением).
Представим наиболее общий случай построения систем автоматического
управления, содержащий максимум элементов (рис. 1), где ЗЭ – задающий
элемент, СЭ – сравнивающий элемент, ЧЭ – измерительный (чувствительный)
элемент, ПЭ – преобразующий элемент, УЭ – усилительный элемент, ИЭ –
исполнительный элемент, ОУ – объект управления, КУ – местная обратная
связь, ГОС – главная обратная связь.
Рис. 1 Система автоматического управления в общем виде
10Вывод: Одноуровневые системы управления, в которых управление
объектом осуществляется с одного пункта управления, называются
централизованными. Одноуровневые системы, в которых отдельные части
сложного объекта управляются из самостоятельных пунктов управления,
называются децентрализованными.
Практическое занятие №3
Тема: Измерения сопротивления с помощью мостов постоянного тока.
Цель работы: изучить принцип работы мостов постоянного тока и
приобрести умения и навыки измерения сопротивлений с помощью мостов;
приобрести умения и навыки измерения сопротивления, напряжения и силы
тока с помощью комбинированных приборов.
Оборудование: мосты постоянного тока, комбинированные приборы,
резисторы, источники постоянного и переменного тока.
11Краткие теоретические сведения.
Мостовые методы измерения параметров электрических цепей широко
применяются в измерительной технике. Эти методы дают возможность
измерить сопротивление, ёмкость и индуктивность с высокой точностью.
Высокая точность обусловлена применением измеряемых образцовых мер
сопротивления, ёмкости и индуктивности. Мостовая схема может иметь вид
четырёхполюсника, состоящего из резисторов, конденсаторов, катушек
индуктивности или их комбинаций. Мосты бывают уравновешенные и
неуравновешенные, одинарные и двойные, для постоянного и переменного
токов. Одинарные мосты, как правило, применяются для измерения
относительно больших сопротивлений, двойные − для измерения малых
сопротивлений.
С принципом действия мостовой схемы ознакомимся на примере моста
Уитстона. Мост Уитстона представляет собой прибор, применяемый для
измерения сопротивления постоянному току сравнительным методом.
Воспользуемся правилами Кирхгофа для расчёта моста постоянного тока. На
схеме показаны плечи моста:
искомое Rх, эталонное Rэ и два
вспомогательных R1, R2 сопротивления. Запишем первое правило Кирхгофа
для узлов 1 и 2, с учётом правила знаков: (2.1)
Запишем второе правило Кирхгофа для контуров 1231 и 1421,
последовательностью нумерации задав направление обхода (по часовой
стрелке). Правая часть обращается в нуль, так как э.д.с. в этих контурах
отсутствуют. Меняя величину эталонного и соотношение вспомогательных
сопротивлений, можно добиться равенства нулю показаний гальванометра.
Тогда система уравнений упрощается. Разделив третье уравнение на
четвертое, получим формулу для расчёта искомого сопротивления.
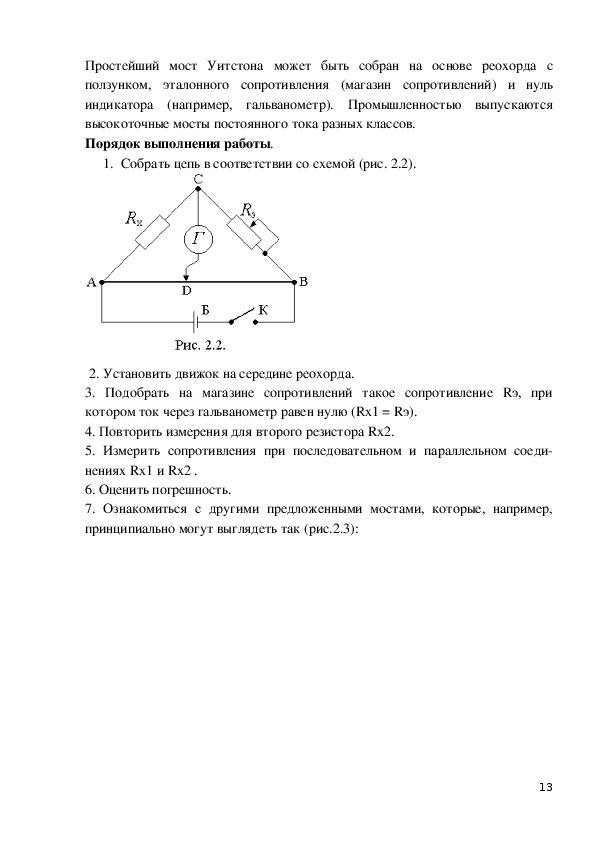
12Простейший мост Уитстона может быть собран на основе реохорда с
ползунком, эталонного сопротивления (магазин сопротивлений) и нуль
индикатора (например, гальванометр). Промышленностью выпускаются
высокоточные мосты постоянного тока разных классов.
Порядок выполнения работы.
1. Собрать цепь в соответствии со схемой (рис. 2.2).
2. Установить движок на середине реохорда.
3. Подобрать на магазине сопротивлений такое сопротивление Rэ, при
котором ток через гальванометр равен нулю (Rx1 = Rэ).
4. Повторить измерения для второго резистора Rx2.
5. Измерить сопротивления при последовательном и параллельном соеди
нениях Rx1 и Rx2 .
6. Оценить погрешность.
7. Ознакомиться с другими предложенными мостами, которые, например,
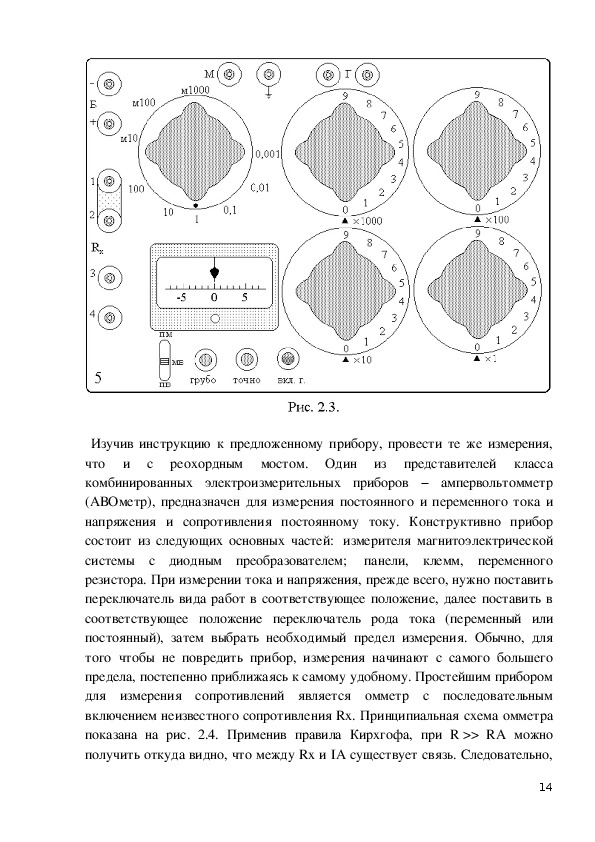
принципиально могут выглядеть так (рис.2.3):
13Изучив инструкцию к предложенному прибору, провести те же измерения,
что и с реохордным мостом. Один из представителей класса
комбинированных электроизмерительных приборов − ампервольтомметр
(АВОметр), предназначен для измерения постоянного и переменного тока и
напряжения и сопротивления постоянному току. Конструктивно прибор
состоит из следующих основных частей: измерителя магнитоэлектрической
системы с диодным преобразователем;
панели, клемм, переменного
резистора. При измерении тока и напряжения, прежде всего, нужно поставить
переключатель вида работ в соответствующее положение, далее поставить в
соответствующее положение переключатель рода тока (переменный или
постоянный), затем выбрать необходимый предел измерения. Обычно, для
того чтобы не повредить прибор, измерения начинают с самого большего
предела, постепенно приближаясь к самому удобному. Простейшим прибором
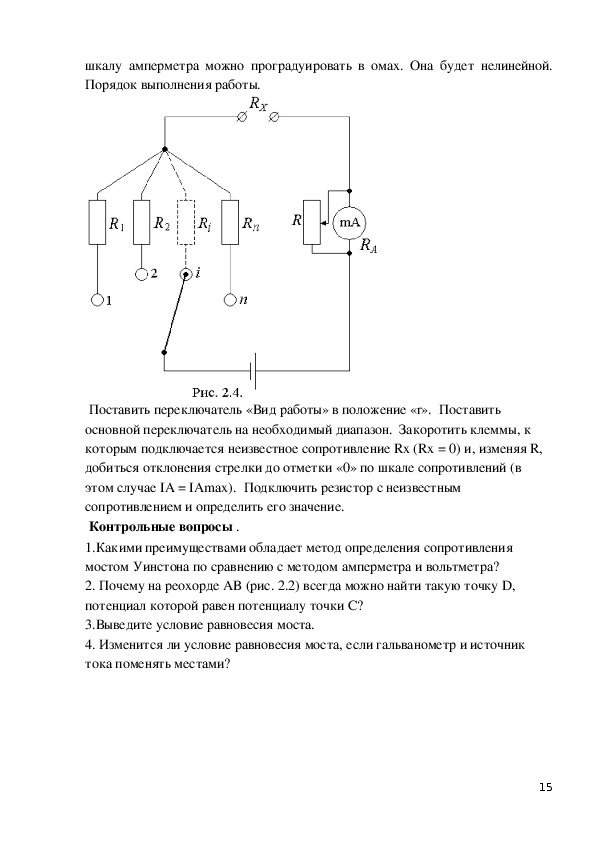
для измерения сопротивлений является омметр с последовательным
включением неизвестного сопротивления Rx. Принципиальная схема омметра
показана на рис. 2.4. Применив правила Кирхгофа, при R >> RA можно
получить откуда видно, что между Rx и IА существует связь. Следовательно,
14шкалу амперметра можно проградуировать в омах. Она будет нелинейной.
Порядок выполнения работы.
Поставить переключатель «Вид работы» в положение «r». Поставить
основной переключатель на необходимый диапазон. Закоротить клеммы, к
которым подключается неизвестное сопротивление Rx (Rx = 0) и, изменяя R,
добиться отклонения стрелки до отметки «0» по шкале сопротивлений (в
этом случае IА = IАmax). Подключить резистор с неизвестным
сопротивлением и определить его значение.
Контрольные вопросы .
1.Какими преимуществами обладает метод определения сопротивления
мостом Уинстона по сравнению с методом амперметра и вольтметра?
2. Почему на реохорде АВ (рис. 2.2) всегда можно найти такую точку D,
потенциал которой равен потенциалу точки С?
3.Выведите условие равновесия моста.
4. Изменится ли условие равновесия моста, если гальванометр и источник
тока поменять местами?
15Практическое занятие №4
Тема: Измерения индуктивностей и емкостей с помощью мостов
переменного тока.
Цель работы: изучить способы измерения индуктивностей и емкостей с
помощью мостов переменного тока.
Краткие теоретические сведения.
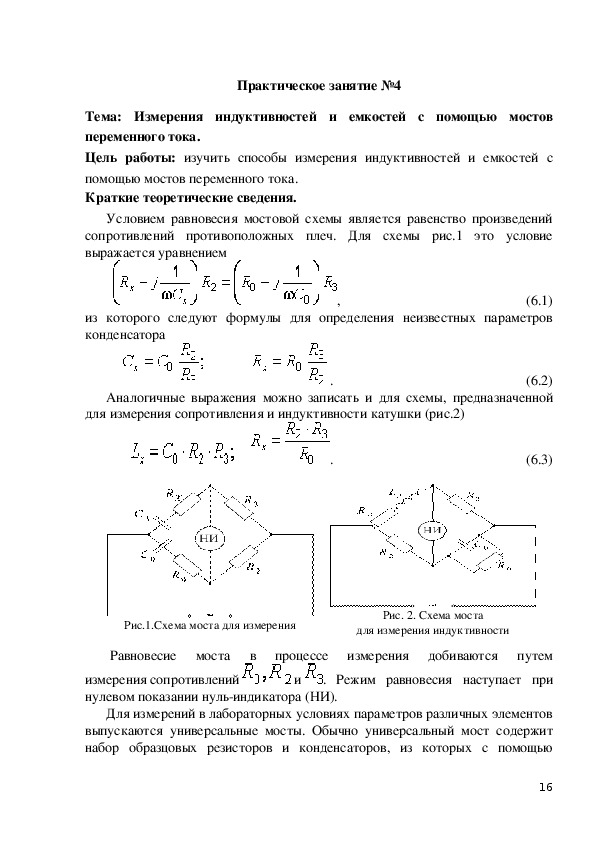
Условием равновесия мостовой схемы является равенство произведений
сопротивлений противоположных плеч. Для схемы рис.1 это условие
выражается уравнением
, (6.1)
из которого следуют формулы для определения неизвестных параметров
конденсатора
. (6.2)
Аналогичные выражения можно записать и для схемы, предназначенной
для измерения сопротивления и индуктивности катушки (рис.2)
. (6.3)
Рис.1.Схема моста для измерения
Рис. 2. Схема моста
для измерения индуктивности
Равновесие моста в процессе измерения добиваются путем
. Режим равновесия наступает при
и
измерения сопротивлений
нулевом показании нульиндикатора (НИ).
Для измерений в лабораторных условиях параметров различных элементов
выпускаются универсальные мосты. Обычно универсальный мост содержит
набор образцовых резисторов и конденсаторов, из которых с помощью
16переключателя выбора типа измеряемого объекта составляются схемы рис.1
или 2.
Значения сопротивления R3 и образцовой ёмкости C0 определяются
диапазоном измерения и выбираются обычно переключателем «МНОЖИТЕЛЬ».
Более точное уравновешивание моста осуществляется переменными
сопротивлениями R2 и R0, рукоятки которых выведены на панель моста и
отмечены надписями «ОТСЧЁТ» и «ФАЗА» соответственно.
При таком методе уравновешивания активное сопротивление измеряемого
объекта зависит от двух измеряемых резисторов R2 и R0 (6.2), (6.3), что не
позволяет получить значение RX непосредственным отсчётом. Вместо RX в
универсальных мостах измеряются тангенс угла потерь конденсатора
(6.4)
и добротность катушки
Если в формулу (6.4) подставим выражение (6.2), получим
. (6.5)
откуда видно, что R0 можно проградуировать в единицах tgδ.
Аналогичное выражение можно получить и для добротности катушки.
Нульиндикатор моста переменного тока должен обладать высокой
чувствительностью и большим входным сопротивлением. В универсальных
мостах нульиндикатором служит электронный усилитель с прибором
выпрямительной системы на выходе. В качестве нульиндикатора можно
применять электронный осциллограф.
Питание мостов переменного тока обычно осуществляется напряжением
частотой 100,1000 Гц и выше.
2. Работа с универсальным мостом
1. Включить прибор в сеть 220 В и дать ему прогреться в течение 5 минут.
2. Подключить измеряемый объект к клеммам CLR .
3. Переключатель C , L, ~ R, =R установить в положение, соответствующее
измеряемой величине, переключатель «ЧАСТОТА» Hz – в положение 1000.
Ручку Q, tgδ поставить в положение Q при измерении индуктивности и в
положение tgδ при измерении емкости.
4. Ручкой «ЧУВСТВИТЕЛЬНОСТЬ ИНДИКАТОРА» установить стрелку
индикатора во второй половине шкалы.
5.
Переключателем «МНОЖИТЕЛЬ» добиваются минимального
показания прибора.
6. Ручками «ОТСЧЁТ» и «ФАЗА» добиваются равновесия моста.
7.
По шкалам прибора произвести отсчёт измеряемых
величин CX и tgδ или LX и Q.
3. Применение электронного осциллографа в качестве нульиндикатора.
171. Включить осциллограф и дождаться появления на экране устойчивого
светового изображения (точки или прямой линии).
2. Ручку «УСИЛЕНИЕ Х» поставить в крайнее левое положение.
3. Подключить вход «Y» осциллографа к диагонали мостовой схемы. При
этом на экране появится вертикальная линия.
4. Ручкой «УСИЛЕНИЕ Y» добиться, чтобы изображение заняло большую
часть экрана.
5. В процессе уравновешивания моста высота изображения уменьшается.
Момент равновесия определяется по минимальной длине вертикального
отрезка. Ручку «УСИЛЕНИЕ Y» в процессе измерения постепенно
переводить в положение минимальной чувствительности (крайнее правое
положение).
1. Измерить параметры предложенных конденсаторов и катушек
4. Задание.
индуктивности универсальным мостом.
2. Измерить параметры предложенных конденсаторов и катушек с
помощью мостовых схем. Схему собрать из магазинов сопротивлений и
магазина емкости. В качестве нульиндикатора использовать осциллограф.
Напряжение для питания моста частотой 1000 Гц подавать с измерительного
генератора. Результаты измерений и вычислений занести в табл.1 и 2.
Таблица
1
Результаты измерения параметров катушек
Мостовая схема
R0,
Ом
C0,
мкФ
R2,
Ом
R3,
Ом
LX,
мГн
RX,
Ом
Таблица 2
Универсальный мост
LX,
RX,
Ом
мГн
Q
Результаты измерения параметров конденсаторов
Универсальный мост
CX ,
RX ,
Ом
мкФ
tgd
Мостовая схема
C0 ,
мкФ
R0 ,
Ом
R2 ,
Ом
R3 ,
Ом
CX ,
мкФ
RX ,
Ом
1. Какие приборы можно применять в качестве нульиндикатора в мостах
Контрольные вопросы
переменного тока?
2. Можно ли, изменяя параметр лишь одного элемента, добиться
равновесия моста переменного тока?
3. Как измерить взаимную индуктивность с помощью моста переменного
тока?
4. Почему универсальные мосты измеряют не активные сопротивления, а
добротность катушки или тангенс угла потерь конденсатора?
185. Определить значения сопротивлений плеч уравновешенного моста,
если C0 = 1 мкФ, CX = 2,75 мкФ, а tgδ = 0,1 на частоте 1000 Гц.
6. Составить схему моста для измерения ёмкости и угла потерь
конденсатора с большими потерями.
Вывод:
Практическое занятие №5
Тема: Измерения электрических величин компенсационным методом в
цепях постоянного тока.
Цель работы: целью работы является изучение метода компенсационных
электрических измерений на примере измерения электродвижущей силы,
напряжения и силы тока на участках цепи.
Приборы и принадлежности: магазин сопротивлений, нормальный элемент с
известной ЭДС, источник тока с неизвестной ЭДС, стенд с электрической
схемой, подготовленной для измерения методом компенсации.
1. Теоретические сведения
Компенсационный метод электрических измерений электродвижущих сил,
токов и сопротивлений в настоящее время является одним из основных
точных методов измерений электродвижущей силы источника. Электродви
жущая сила источника тока (ЭДС) есть работа сторонних сил по перемеще
нию единичного положительного заряда по замкнутому контуру. Пусть
источник тока с ЭДС
ε
и внутренним сопротивлением r замкнут
на внешнее
Рис.1
сопротивление R (рис. 1). По цепи протекает ток I. Тогда по закону Ома
=ε IR + Ir. (1)
Вольтметр, включённый параллельно источнику тока, измеряет разность
потенциалов на клеммах источника, равную падению напряжения на внешнем
участке цепи:
U = IR. (2)
Измеренное напряжение U отличается от
на величину падения напряжения
на внутреннем участке цепи (см. формулы (1) и (2)). Но из (1) следует, что
вольтметр покажет значение ЭДС (U = ), если в момент измерения через
источник тока не будет протекать ток (I = 0).
ε
ε
19Условие равенства нулю тока в момент измерения ЭДС достигается примене
нием метода компенсации.
Рис.2
Принципиальная схема измерения электродвижущей силы неизвестного
элемента компенсационным методом представлена на рис. 2, где g –
чувствительный гальванометр для фиксации тока через исследуемый
источник тока; AB – реохорд с подвижным контактомD (полное сопротив
ление Rучастка цепи AB остаётся постоянным: R =R1 + R2); направление
токов показано стрелками. Ток I2 через гальванометр может иметь разное
направление в зависимости от соотношения сопротивлений R1 и R2.
ε
Принцип метода состоит в том, что два элемента различных ЭДС 1 и
εx включают полюсами навстречу друг другу и добиваются исчезновения
тока I2 через исследуемый элемент εx (εx должна быть меньше 1, поэтому в
качестве элемента 1 часто используют батарею аккумуляторов). Для общего
случая, показанного на рис. 2, по первому закону Кирхгофа для узла А имеем
ε
ε
;
I = I1 + I2. (3)
Применяя второй закон Кирхгофа к контурам 1ε ADB (обход по часовой
стрелке) и AεxD(обход против часовой стрелки), получим уравнения
ε1 = IR2 + I1(r1 + R1); (4)
εx = IR2 + I2(rx + rg), (5)
где I1 – ток в цепи аккумулятора 1,ε I2 – ток в цепи элемента εx, I – ток на
участке AD, R1 иR2 – сопротивления участков цепи AD и DB, rg –
сопротивление гальванометра, r1 и rx – внутренние сопротивления аккумуля
тора и исследуемого элемента. Подбирая величину сопротивления R2 = Rx,
можно добиться исчезновения тока в цепи гальванометра (I2 = 0). Тогда
уравнения (3), (4) и (5) принимают вид
I = I1; (6)
1 =ε
IRx + I1(r1 + R1); (7)
εx = IRx. (8)
Сравнивая формулы (6) – (8), получим
. (9)
Отсутствие тока в цепи гальванометра показывает, что электродвижущая си
ла элемента εx, целиком уравновешивается или компенсируется падением
20потенциала между точками A иD, то есть при отсутствии тока в цепи гальва
нометра разность потенциалов между точкамиA и D равна электродвижущей
силе искомого элемента εx. Если вместо εx в ту же схему подключить источ
ник тока с известной ЭДС εn («нормальный» источник тока), тогда формула
(9) примет вид
. (10)
Поделив формулу (8) и (9), получим
,
откуда
, (11)
где Rx – сопротивление участка цепи при включении элемента εx, Rn – сопро
тивление участка цепи при включении элемента εn. Таким образом, измере
ние ЭДС неизвестного элемента εx сводится к подбору и измерению сопро
тивлений R1 и R2 участка DB, получаемых при I2 = 0. В качестве «нормаль
ного» элемента обычно употребляется ртутнокадмиевый элемент, ЭДС кото
рого практически не меняется со временем (εn = 1,018 В при температуре
20°С) и мало зависит от температуры. Методом компенсация может быть
измерено значение напряжения на какомто участке произвольной
электрической цепи. Для этого в схеме (рис. 2) вместо ЭДС εx включается
исследуемый участок и производится компенсация тока через него. Тогда
напряжение на исследуемом участке можно рассчитать (согласно (11)) .
Методом компенсации может быть измерена сила тока в исследуемой
электрической цепи. Для этого вместо εx в схеме (рис. 2) подсоединяют
участок этой цепи, сопротивление Rпер которого известно. Методом
компенсации измеряют падение напряжения U на Rпер описанным выше
способом. А затем по закону Ома рассчитывается сила тока. Методом
компенсации может быть измерено сопротивление неизвестной величины. Для
этого сначала на этом сопротивлении измеряется падение напряжения U. При
известной силе тока I через сопротивление по закону Ома рассчитывается
величина неизвестного сопротивления. Таким образом, методом компенсации
можно с высокой точностью измерить ЭДС источника тока, падение
напряжения, силу тока и сопротивление. Преимущества метода компенса
ции заключаются в следующем:
1. Сила тока через источники тока, ЭДС которых сравниваются, близка к
нулю (определяется чувствительностью гальванометра). Поэтому практически
21равны нулю падение напряжения внутри элемента, снижающего значение ЭДС,
а также падения напряжения в проводах.
2. Гальванометр в измерительной цепи работает как нулевой прибор, и
градуировка его шкалы на результат изменений не влияет. Сопротивления,
входящие в расчетные формулы (11) – (14), могут быть в настоящее время
измерены с точностью до сотых долей процента.
3. ЭДС вспомогательной батареи 1 не входит в формулу для расчёта, т. е. её
значение знать точно необязательно. Необходимо только, чтобы её значение в
процессе измерения было постоянным и превышало ЭДС сравниваемых
элементов.
2. Методика измерений.
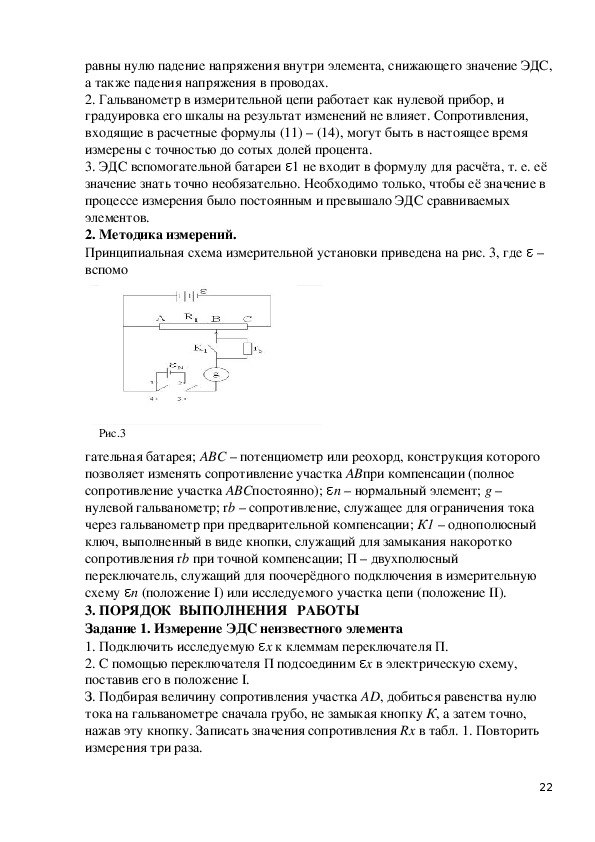
Принципиальная схема измерительной установки приведена на рис. 3, где
вспомо
– ε
ε
Рис.3
гательная батарея; ABС – потенциометр или реохорд, конструкция которого
позволяет изменять сопротивление участка AВпри компенсации (полное
сопротивление участка ABСпостоянно); εn – нормальный элемент; g –
нулевой гальванометр; rb – сопротивление, служащее для ограничения тока
через гальванометр при предварительной компенсации; К1 – однополюсный
ключ, выполненный в виде кнопки, служащий для замыкания накоротко
сопротивления rb при точной компенсации; П – двухполюсный
переключатель, служащий для поочерёдного подключения в измерительную
схему εn (положение I) или исследуемого участка цепи (положение II).
3. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Задание 1. Измерение ЭДС неизвестного элемента
1. Подключить исследуемую εx к клеммам переключателя П.
2. С помощью переключателя П подсоединим εx в электрическую схему,
поставив его в положение I.
З. Подбирая величину сопротивления участка AD, добиться равенства нулю
тока на гальванометре сначала грубо, не замыкая кнопку К, а затем точно,
нажав эту кнопку. Записать значения сопротивления Rx в табл. 1. Повторить
измерения три раза.
224. Переключатель П поставить в положение II, подключая в электрическую
схему «нормальный» элемент εn.
5. Подобрать величину сопротивления участка AD такой, чтобы ток через
гальванометр и. следовательно, через «нормальный» элемент не протекал.
Записать значение сопротивления Rn в табл. 1. Измерения провести три раза.
6. Рассчитать по формуле ЭДС неизвестного элемента:
7. Занести данные измерений и вычислений в таблицу 1. Таблица 1
ΔRn, Ом Rn ср,Ом εx, В
№
1
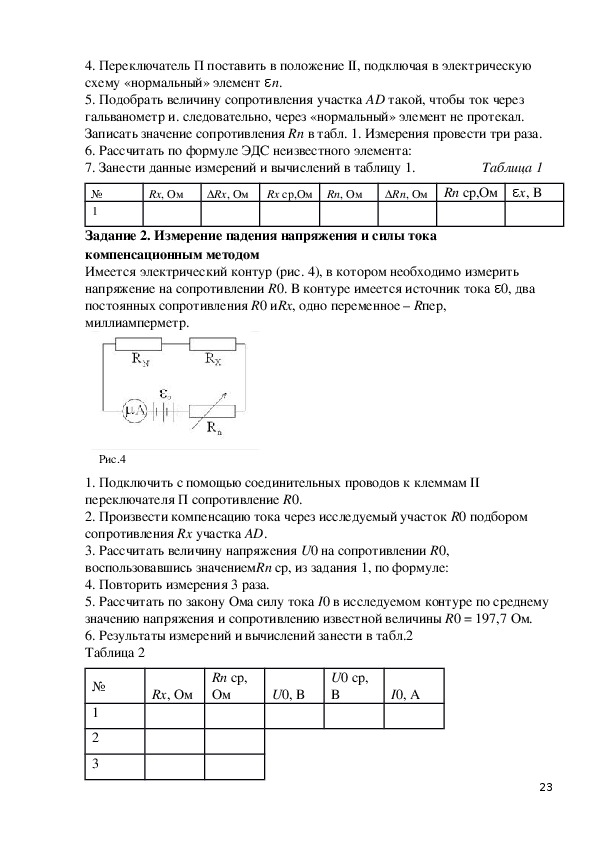
Задание 2. Измерение падения напряжения и силы тока
компенсационным методом
Имеется электрический контур (рис. 4), в котором необходимо измерить
напряжение на сопротивлении R0. В контуре имеется источник тока 0, два
постоянных сопротивления R0 иRx, одно переменное – Rпер,
миллиамперметр.
Rx, Ом
ΔRx, Ом
Rx ср,Ом Rn, Ом
ε
Рис.4
1. Подключить с помощью соединительных проводов к клеммам II
переключателя П сопротивление R0.
2. Произвести компенсацию тока через исследуемый участок R0 подбором
сопротивления Rx участка AD.
3. Рассчитать величину напряжения U0 на сопротивлении R0,
воспользовавшись значениемRn ср, из задания 1, по формуле:
4. Повторить измерения 3 раза.
5. Рассчитать по закону Ома силу тока I0 в исследуемом контуре по среднему
значению напряжения и сопротивлению известной величины R0 = 197,7 Ом.
6. Результаты измерений и вычислений занести в табл.2
Таблица 2
Rx, Ом
Rn ср,
Ом
U0, В
U0 ср,
В
I0, A
№
1
2
3
23Задание 3. Градуировка миллиамперметра
Чтобы проградуировать миллиамперметр необходимо поставить в
соответствие значение силы тока Ik и количество делений прибора k.
Количество делений прибора и, следовательно, силу тока в исследуемом
контуре будем менять ручкой переменного сопротивления Rпер.
1. Подключить с помощью соединительных проводов к клеммам II
переключателя П сопротивление R0.
2. Установить произвольное значение силы тока на миллиамперметре (k –
количество делений).
З. Произвести компенсацию тока через исследуемый участок R0 подбором
сопротивленияRx участка AD.
4. Рассчитать значение силы тока Ik по формуле:
5. Повторить измерения для различных значений силы тока, задаваемых
числом k.
6. Занести данные измерений и вычислений в таблицу 3.
7. По полученным данным построить градуировочный график Ik = f(k).
8. Найти цену деления миллиамперметра по наклону графика:
Таблица 3
№
Ik, А
Rx, Ом
K
1
2
3
4
5
…
Задание 4. Измерение сопротивления компенсационным способом
1. Подключить неизвестное сопротивление исследуемого контура (рис. 4) к
клеммам II переключателя П.
2. Скомпенсировать схему.
3. Измерить силу тока I в контуре.
4. Рассчитать R по формуле:
5. Данные измерений и вычислений запасти в таблицу 4.
6. Выключить источник питания.
Таблица 4
Rx, Ом
I, A
Rn ср,
Ом
R, Ом
Rср,
Ом
№
1
242
3
Вывод:
Контрольные вопросы:
1. Что такое ЭДС источника тока?
2. Записать и сформулировать закон Она в интегральной форме для участка
цепи и замкнутого контура.
3. Записать и сформулировать правила Кирхгофа.
4. Объяснять сущность метода компенсация на примере работы
принципиальной схемы.
5. Какими преимуществами обладает метод компенсации?
6. Как измерить ЭДС неизвестного источника компенсационным способом?
7. Как измерить напряжение, ток и сопротивление компенсационным
способом?
Техника безопасности:
1. В случае повреждения проводки установку включать запрещается.
2. О неисправностях сообщать преподавателю.
Библиографический список
1. Савельев Ш. В. Курс общей физики, ч. II. М.: Высш. шк., 1999.
2. Трофимова Т. И. Курс физики. М.: Высш. шк., 1999.
25Практическое занятие №6
Тема: Исследование режимов работы и методов расчета линейных цепей
постоянного тока с одним источником питания.
Цель работы: применение законов Ома и Кирхгофа для расчета
разветвленных электрических цепей постоянного тока, снятие вольт
амперных характеристик для линейных и нелинейных элементов цепи,
использование графического метода расчета линейных и нелинейных
электрических цепей постоянного тока.
Комплекс устройств, связанных единым энергетическим процессом
выработки, передачи, распределения и потребления электрической энергии,
называется электрической цепью. Расчет электрических цепей производится с
помощью законов Ома и Кирхгофа, определяющих взаимосвязь между ЭДС,
напряжениями, токами и сопротивлениями. По закону Ома для электрической
цепи, содержащей источник ЭДС, ток прямо пропорционален ЭДС источника
и обратно пропорционален суммарному сопротивлению всей цепи.
Основные теоретические положения
условных графических изображений входящих в цепь
электротехнических устройств показывают их соединения между собой
проводниками. В простейшей электрической цепи постоянного тока
26приемник с сопротивлением R потребляет электрическую энергию из
источника с электродвижущей силой.
R + Ra + 2Rnv~
В соответствии с законом Ома для пассивного участка электрической
цепи, т.е. для участка, не содержащего ЭДС, ток пропорционален напряжению
Uи, действующему на данном участке, и обратно пропорционален его
сопротивлению. Отсюда напряжение, действующее на участке электрической
цепи, есть падение напряжения на этом участке от протекающего тока. В
соответствии с первым законом Кирхгофа алгебраическая сумма токов в
точке разветвления электрической цепи равна нулю. По второму закону
Кирхгофа алгебраическая сумма ЭДС, действующих в замкнутом контуре,
равна алгебраической сумме напряжений и падений напряжения в этом
контуре электрической цепи. При составлении уравнений для расчета в
соответствии с указанными законами необходимо учитывать, каким способом
соединены элементы рассматриваемой электрической цепи.
При
последовательном соединении по всем элементам электрической цепи
протекает один и тот же ток. При параллельном соединении элементов
(ветвей) цепи все элементы находятся под одним и тем же напряжением. При
смешанном соединении потребителей электрической энергии одна часть
потребителей соединена параллельно, а другая последовательно.
Приведенные уравнения справедливы для линейных и нелинейных цепей
постоянного тока. Параметры линейных элементов цепей (сопротивления и
проводимости) не зависят от тока и напряжения, их вольтамперные
характеристики (ВАХ) изображаются прямыми линиями, тангенс угла
наклона которых к оси тока определяет электрическое сопротивление. В
отличие от линейных электрических цепей при расчете нелинейных цепей,
параметры которых зависят от тока и напряжения и имеют криволинейные
характеристики,
удобно пользоваться графическим методом с
использованием экспериментальных вольтамперных характеристик
элементов цепи, т.е. зависимостей тока в цепи от напряжения на элементах
цепи. Так как при последовательном соединении элементов ток обоих
участков цепи одинаков, а подведенное напряжение U = 1/я +UR, определение
27зависимости тока на входе от приложенного напряжения производят
суммированием абсцисс заданных кривых (напряжений) при заданном
значении тока. При параллельном соединении элементов цепи указанную
зависимость находят суммированием соответствующих токов / = 1R + IR при
заданном значении напряжения U.
Аналогично находят остальные координаты результирующих вольт
амперных характеристик цепи путем изменения значений / и U.
Задание
1. Исследовать электрическое состояние цепи с одним источником
питания при смешанном соединении пассивных элементов.
2. Проверить свойства линейности и нелинейности.
3. Экспериментально проверить возможность применения закона Ома и
законов Кирхгофа для расчета разветвленной электрической цепи
постоянного тока.
4. Снять вольтамперные характеристики линейной и нелинейной
электрических цепей постоянного тока.
5. Сделать краткие выводы по работе.
Порядок выполнения работы
Провести внешний осмотр измерительных приборов амперметров и
вольтметра, установленных на панели № 6 лабораторного стенда, и записать в
отчет о лабораторной работе технические данные приборов (табл. 2.).
Таблица 2.
Прибор j Тип і
Система і
тока
Предел і Класс измерения 1
точности
Цена деления шкалы
Амперметр А[ 1
Амперметр Лі
Амперметр A3 1
Вольтметр V
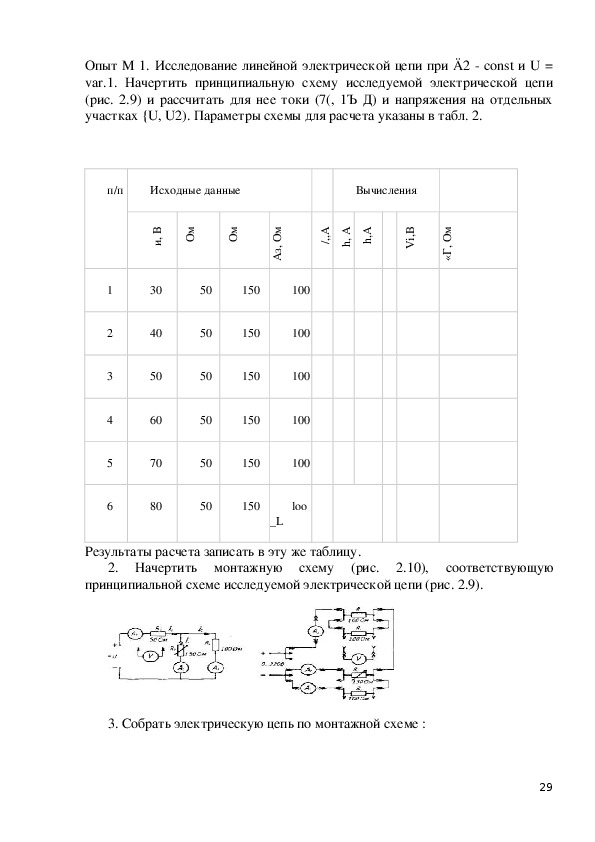
28Опыт М 1. Исследование линейной электрической цепи при Ä2 const и U =
var.1. Начертить принципиальную схему исследуемой электрической цепи
(рис. 2.9) и рассчитать для нее токи (7(, 1Ъ Д) и напряжения на отдельных
участках {U, U2). Параметры схемы для расчета указаны в табл. 2.
п/п
Исходные данные
Вычисления
В
,
и
м
О
м
О
м
О
,
з
А
А
,
,
/
А
,
h
A
h
,
B
,
i
V
м
О
,
Г
«
1
2
3
4
5
6
30
40
50
60
70
80
50
50
50
50
50
50
150
100
150
100
150
100
150
100
150
100
150
loo
_L
Результаты расчета записать в эту же таблицу.
2. Начертить монтажную схему (рис. 2.10), соответствующую
принципиальной схеме исследуемой электрической цепи (рис. 2.9).
3. Собрать электрическую цепь по монтажной схеме :
29 соединение резисторов и измерительных приборов при сборке цепи
производить с помощью соединительных проводов, входящих в комплект
стенда;
в качестве вольтметра использовать имеющийся на рабочей панели № 6
стенда вольтметр с пределом измерения 150 В;
в качестве амперметров Аи А2 и Ai использовать имеющиеся на рабочей
панели № 6 стенда амперметры с пределами измерений А і 2 А, А2 1 А, Аг
2 А;
в качестве источника использовать источник регулируемого постоянного
напряжения (0...220 В).
4. Ручку движка переменного резистора R2 установить в крайнее левое
положение, соответствующее Rj=150 Ом = const.
5. Рукоятку регулятора источника постоянного напряжения (на панели
источников питания) установить в крайнее левое положение
и=ов.
6. Предъявить собранную схему для проверки преподавателю и получить
разрешение на выполнение опытных измерений.
7. Включить регулируемый источник питания постоянного напряжения
нажатием последовательно кнопок «Сеть» и «Постоянное напряжение».
8. Изменяя напряжение на выходе источника питания (30,40, 50, 60, 70, 80
В), снять показания амперметров Ау, А2, Аъ, а также напряжения на участках
цепи U] и U2, переключая вольтметр (находящийся на панели № 6) с одного
ее участка на другой. Записать показания всех приборов в табл. 2.3.
Внимание!
> Напряжение источника питания увеличивать, поворачивая плавно
рукоятку регулятора и контролируя по вольтметру, установленному на
панели источников питания (U<80 В).
> Токи в ветвях схемы по показаниям амперметров не должны превышать
1 А, а именно h < 1 А (амперметр Ai) 12 < 1 А (амперметр А2), 13 < 0,7 А
(амперметр А3).
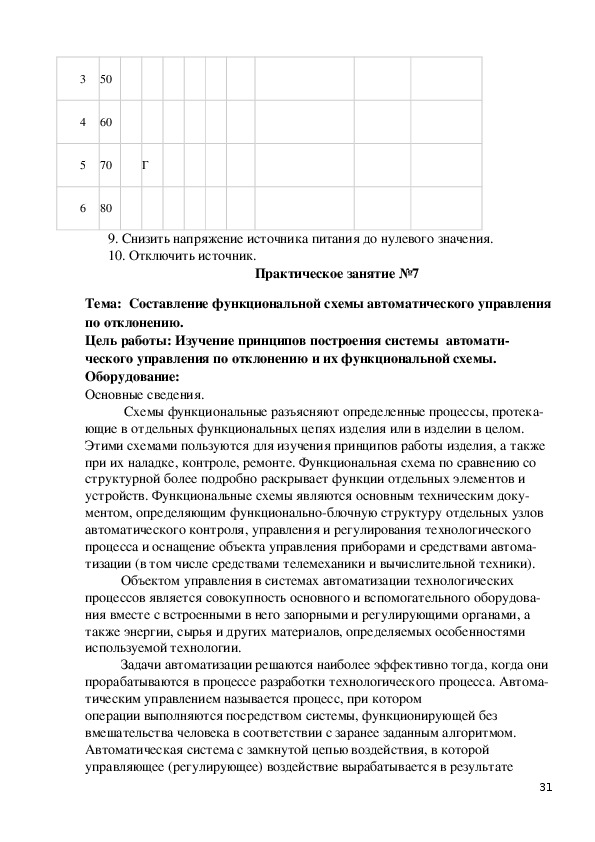
Таблица 2.3
Измерения
Вычисления
п
/
п
В
и
,
А
,
|
/
А
,
h
,
А
3
/
В
4
1
1
2
30
40
в
,
2
и
м
О
,
ь
Л
m
O
2
Ä
,
m
O
3
ä
,
м
О
Е
Д
,
303
4
5
6
50
60
70
80
Г
9. Снизить напряжение источника питания до нулевого значения.
10. Отключить источник.
Практическое занятие №7
Тема: Составление функциональной схемы автоматического управления
по отклонению.
Цель работы: Изучение принципов построения системы автомати
ческого управления по отклонению и их функциональной схемы.
Оборудование:
Основные сведения.
Схемы функциональные разъясняют определенные процессы, протека
ющие в отдельных функциональных цепях изделия или в изделии в целом.
Этими схемами пользуются для изучения принципов работы изделия, а также
при их наладке, контроле, ремонте. Функциональная схема по сравнению со
структурной более подробно раскрывает функции отдельных элементов и
устройств. Функциональные схемы являются основным техническим доку
ментом, определяющим функциональноблочную структуру отдельных узлов
автоматического контроля, управления и регулирования технологического
процесса и оснащение объекта управления приборами и средствами автома
тизации (в том числе средствами телемеханики и вычислительной техники).
Объектом управления в системах автоматизации технологических
процессов является совокупность основного и вспомогательного оборудова
ния вместе с встроенными в него запорными и регулирующими органами, а
также энергии, сырья и других материалов, определяемых особенностями
используемой технологии.
Задачи автоматизации решаются наиболее эффективно тогда, когда они
прорабатываются в процессе разработки технологического процесса. Автома
тическим управлением называется процесс, при котором
операции выполняются посредством системы, функционирующей без
вмешательства человека в соответствии с заранее заданным алгоритмом.
Автоматическая система с замкнутой цепью воздействия, в которой
управляющее (регулирующее) воздействие вырабатывается в результате
31сравнения истинного значения управляемой (регулируемой) величины с
заданным ее значением, называется АСР.
Практически не ограничены и условия их функционирования и
требования по управлению и автоматизации. Однако, базируясь на опыте
проектирования систем управления и автоматизации, можно сформулировать
некоторые общие принципы, которыми следует руководствоваться при
разработке функциональных схем автоматизации:
1) уровень автоматизации технологического процесса в каждый период
времени должен определяться не только целесообразностью внедрения
определенного комплекса технических средств и достигнутым уровнем
научнотехнических разработок, но и перспективой модернизации и развития
технологических процессов. Должна сохраняться возможность наращивания
функций управления;
2) при разработке функциональных и других видов схем автоматизации и
выборе технических средств должны учитываться: вид и характер
технологического процесса, условия пожаро и взрывоопасноe, агрессивность
и токсичность окружающей среды и т.д.; параметры и физикохимические
свойства измеряемой среды; расстояние от мест установки датчиков,
вспомогательных устройств, исполнительных механизмов, приводов машин и
запорных органов до пунктов управления и контроля; требуемая точность и
быстродействие средств автоматизации;
3) система автоматизации технологических процессов должна строиться, как
правило, на базе серийно выпускаемых средств автоматизации и
вычислительной техники. Необходимо стремиться к применению однотипных
средств автоматизации и предпочтительно унифицированных систем,
характеризуемых простотой сочетания, взаимозаменяемостью и удобством
компоновки на щитах управления. Использование однотипной аппаратуры
дает значительные преимущества при монтаже, наладке, эксплуатации,
обеспечении запасными частями и т. п.
4) в качестве локальных средств сбора и накопления первичной информации
(автоматических датчиков), вторичных приборов, регулирующих и
исполнительных устройств следует использовать преимущественно приборы и
средства автоматизации Государственной системы промышленных приборов
(ГСП);
5) в случаях, когда функциональные схемы автоматизации не могут быть
построены на базе только серийной аппаратуры, в процессе проектирования
выдаются соответствующие технические задания на разработку новых средств
автоматизации;
6) выбор средств автоматизации, использующих вспомогательную энергию
(электрическую, пневматическую и гидравлическую), определяется
условиями пожаро и взрывоопасное автоматизируемого объекта,
32агрессивности окружающей среды, требованиями к быстродействию,
дальности передачи сигналов информации и управления и т.д.;
7) количество приборов, аппаратуры управления и сигнализации,
устанавливаемой на оперативных щитах и пультах, должно быть ограничено.
Избыток аппаратуры усложняет эксплуатацию, отвлекает внимание
обслуживающего персонала от наблюдения за основными приборами,
определяющими ход технологического процесса, увеличивает стоимость
установки и сроки монтажных и наладочных работ. Приборы и средства
автоматизации вспомогательного назначения целесообразнее размещать на
отдельных щитах, располагаемых в производственных помещениях вблизи
технологического оборудования.
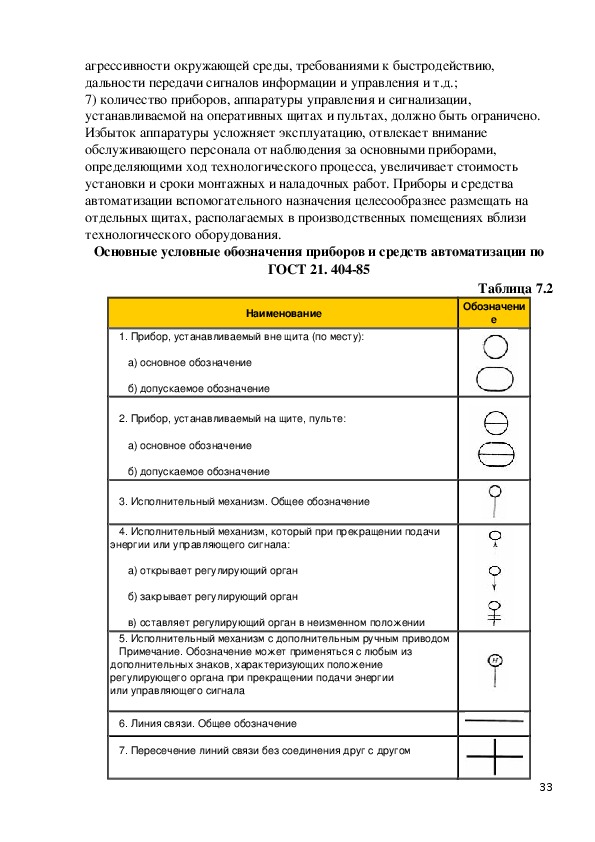
Основные условные обозначения приборов и средств автоматизации по
ГОСТ 21. 40485
Наименование
1. Прибор, устанавливаемый вне щита (по месту):
а) основное обозначение
б) допускаемое обозначение
2. Прибор, устанавливаемый на щите, пульте:
а) основное обозначение
б) допускаемое обозначение
3. Исполнительный механизм. Общее обозначение
4. Исполнительный механизм, который при прекращении подачи
энергии или управляющего сигнала:
а) открывает регулирующий орган
б) закрывает регулирующий орган
в) оставляет регулирующий орган в неизменном положении
5. Исполнительный механизм с дополнительным ручным приводом
Примечание. Обозначение может применяться с любым из
дополнительных знаков, характеризующих положение
регулирующего органа при прекращении подачи энергии
или управляющего сигнала
6. Линия связи. Общее обозначение
7. Пересечение линий связи без соединения друг с другом
Таблица 7.2
Обозначени
е
338. Пересечение линий связи с соединением между собой
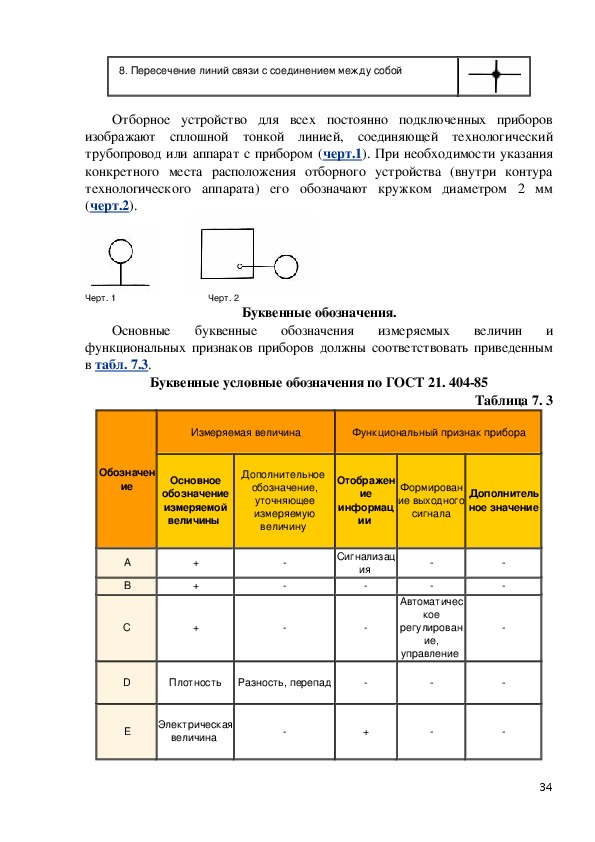
Отборное устройство для всех постоянно подключенных приборов
изображают сплошной тонкой линией, соединяющей технологический
трубопровод или аппарат с прибором (черт.1). При необходимости указания
конкретного места расположения отборного устройства (внутри контура
технологического аппарата) его обозначают кружком диаметром 2 мм
(черт.2).
Черт. 1 Черт. 2
Буквенные обозначения.
Основные буквенные обозначения измеряемых величин и
функциональных признаков приборов должны соответствовать приведенным
в табл. 7.3.
Буквенные условные обозначения по ГОСТ 21. 40485
Таблица 7. 3
Измеряемая величина
Функциональный признак прибора
Обозначен
ие
Основное
обозначение
измеряемой
величины
Дополнительное
обозначение,
уточняющее
измеряемую
величину
Отображен
информац
ие
ии
Формирован
ие выходного
сигнала
Дополнитель
ное значение
A
B
C
D
E
+
+
+
Плотность
Разность, перепад
Электрическая
величина
Сигнализац
ия
Автоматичес
кое
регулирован
ие,
управление
+
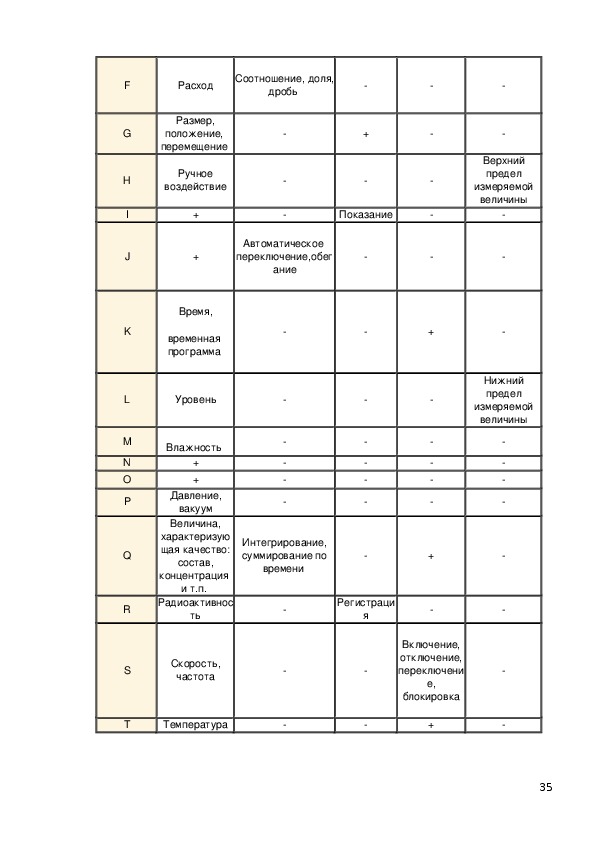
34Расход
Соотношение, доля,
дробь
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
Размер,
положение,
перемещение
Ручное
воздействие
+
+
Время,
временная
программа
Уровень
Влажность
+
+
Давление,
вакуум
Величина,
характеризую
щая качество:
состав,
концентрация
и т.п.
Радиоактивнос
ть
Скорость,
частота
Температура
+
Показание
Автоматическое
переключение,обег
ание
Интегрирование,
суммирование по
времени
Регистраци
я
+
+
Включение,
отключение,
переключени
е,
блокировка
+
Верхний
предел
измеряемой
величины
Нижний
предел
измеряемой
величины
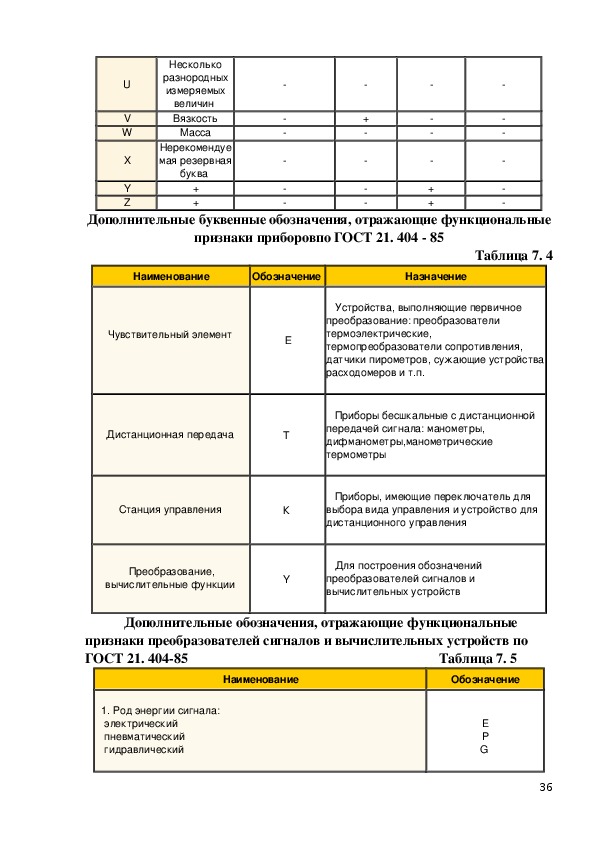
35Несколько
разнородных
измеряемых
величин
Вязкость
Масса
Нерекомендуе
мая резервная
буква
+
+
U
V
W
X
Y
Z
+
+
+
Дополнительные буквенные обозначения, отражающие функциональные
признаки приборовпо ГОСТ 21. 404 85
Таблица 7. 4
Наименование
Обозначение
Назначение
Чувствительный элемент
Дистанционная передача
Станция управления
Преобразование,
вычислительные функции
Устройства, выполняющие первичное
преобразование: преобразователи
термоэлектрические,
термопреобразователи сопротивления,
датчики пирометров, сужающие устройства
расходомеров и т.п.
Приборы бесшкальные с дистанционной
передачей сигнала: манометры,
дифманометры,манометрические
термометры
Приборы, имеющие переключатель для
выбора вида управления и устройство для
дистанционного управления
Для построения обозначений
преобразователей сигналов и
вычислительных устройств
Е
Т
К
Y
Дополнительные обозначения, отражающие функциональные
признаки преобразователей сигналов и вычислительных устройств по
ГОСТ 21. 40485
Таблица 7. 5
Обозначение
Наименование
1. Род энергии сигнала:
электрический
пневматический
гидравлический
E
P
G
36A
D
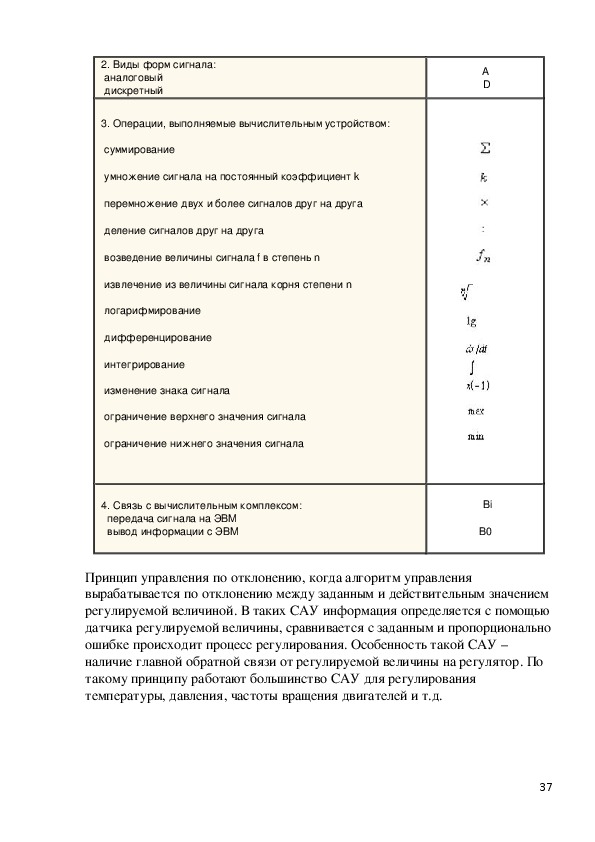
2. Виды форм сигнала:
аналоговый
дискретный
3. Операции, выполняемые вычислительным устройством:
суммирование
умножение сигнала на постоянный коэффициент k
перемножение двух и более сигналов друг на друга
деление сигналов друг на друга
возведение величины сигнала f в степень n
извлечение из величины сигнала корня степени n
логарифмирование
дифференцирование
интегрирование
изменение знака сигнала
ограничение верхнего значения сигнала
ограничение нижнего значения сигнала
4. Связь с вычислительным комплексом:
передача сигнала на ЭВМ
вывод информации с ЭВМ
Bi
B0
Принцип управления по отклонению, когда алгоритм управления
вырабатывается по отклонению между заданным и действительным значением
регулируемой величиной. В таких САУ информация определяется с помощью
датчика регулируемой величины, сравнивается с заданным и пропорционально
ошибке происходит процесс регулирования. Особенность такой САУ –
наличие главной обратной связи от регулируемой величины на регулятор. По
такому принципу работают большинство САУ для регулирования
температуры, давления, частоты вращения двигателей и т.д.
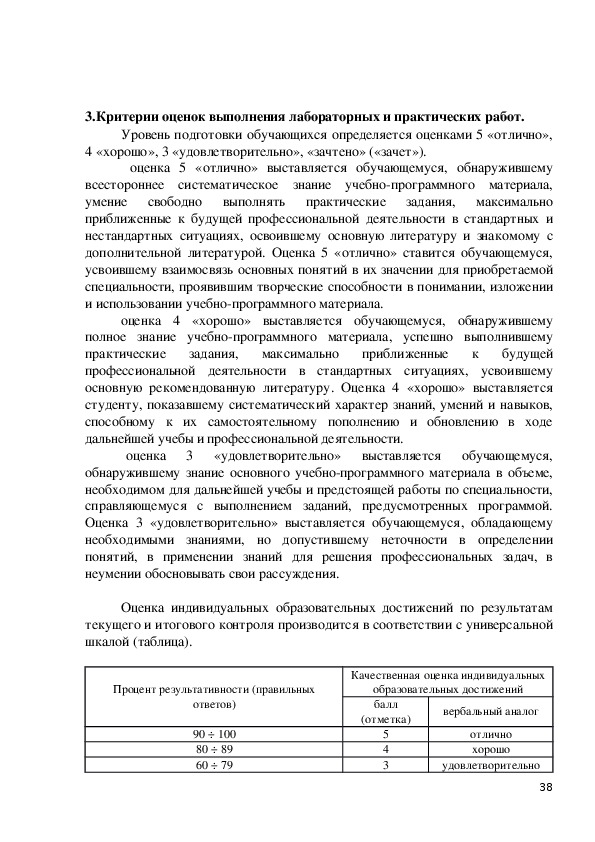
373.Критерии оценок выполнения лабораторных и практических работ.
Уровень подготовки обучающихся определяется оценками 5 «отлично»,
4 «хорошо», 3 «удовлетворительно», «зачтено» («зачет»).
оценка 5 «отлично» выставляется обучающемуся, обнаружившему
всестороннее систематическое знание учебнопрограммного материала,
умение свободно выполнять практические задания,
максимально
приближенные к будущей профессиональной деятельности в стандартных и
нестандартных ситуациях, освоившему основную литературу и знакомому с
дополнительной литературой. Оценка 5 «отлично» ставится обучающемуся,
усвоившему взаимосвязь основных понятий в их значении для приобретаемой
специальности, проявившим творческие способности в понимании, изложении
и использовании учебнопрограммного материала.
оценка 4 «хорошо» выставляется обучающемуся, обнаружившему
полное знание учебнопрограммного материала, успешно выполнившему
практические задания,
максимально приближенные к будущей
профессиональной деятельности в стандартных ситуациях, усвоившему
основную рекомендованную литературу. Оценка 4 «хорошо» выставляется
студенту, показавшему систематический характер знаний, умений и навыков,
способному к их самостоятельному пополнению и обновлению в ходе
дальнейшей учебы и профессиональной деятельности.
оценка 3 «удовлетворительно» выставляется обучающемуся,
обнаружившему знание основного учебнопрограммного материала в объеме,
необходимом для дальнейшей учебы и предстоящей работы по специальности,
справляющемуся с выполнением заданий, предусмотренных программой.
Оценка 3 «удовлетворительно» выставляется обучающемуся, обладающему
необходимыми знаниями, но допустившему неточности в определении
понятий, в применении знаний для решения профессиональных задач, в
неумении обосновывать свои рассуждения.
Оценка индивидуальных образовательных достижений по результатам
текущего и итогового контроля производится в соответствии с универсальной
шкалой (таблица).
Качественная оценка индивидуальных
Процент результативности (правильных
ответов)
90 ÷ 100
80 ÷ 89
60 ÷ 79
образовательных достижений
балл
вербальный аналог
(отметка)
5
4
3
отлично
хорошо
удовлетворительно
38менее 60
2
не удовлетворительно
ЗАКЛЮЧЕНИЕ.
В данном пособии описаны обязательные лабораторные и практические
работы студентов при изучении основ автоматизации производства. В
описании лабораторных и практических работ указан алгоритм их проведения
и источники получения информации. Пособие содержит список основной и
справочной литературы, необходимой при выполнении лабораторных и
практических работ студентами.
В дальнейшем пособие может перерабатываться при изменении
Федеральных государственных стандартов и требований к содержанию и
оформлению методических разработок.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. В.Н.Пантелеев, В.М.Прошин. «Основы автоматизации
Основные источники:
производства».Учебник М. Издательский центр. Академия, 2014.210с.
2. В.Н.Пантелеев,
автоматизации
производства».Лабораторные работы М. Издательский центр. Академия,
2012.192с.
В.М.Прошин.
«Основы
3. В.Н.Пантелеев, В.М.Прошин. «Основы автоматизации производства».
Рабочая тетрадь к лабораторным работам М. Издательский центр.
Академия, 2013.64с.
1.
Дополнительные источники:
Ю.М.Келим. «Типовые элементы систем автоматического управления».
М.: Машиностроение,2002378с.
2. К.И.Котов,
М.А.Шершевер.
«Монтаж эксплуатация и ремонт
автоматических устройств» М. Форуминфра, 2002.378с.
3. В.Ю.Шишмарев.
«Типовые элементы систем автоматического
управления». М. Академия, 2004.300с.
4. Б.И.Черпаков. «Автоматизация и механизация производства». М.
Издательский центр. Академия, 2004.372с.
5. Н.В.Максимов, Т.Л.Партыка, И.И.Попов. «Технические средства
информации». М. Форуминфра, 2005.375с.
Периодическое издание (отечественные журналы):
1. КИП и автоматика обслуживания и ремонт.
392. Мир компьютерной автоматизации.
3. Современные технологии автоматизации.
Интернетресурс:
http://automationsystem.ru/spravochnikinzhenera/item/glava5/57.html
http://www.toroid.ru/prianishnikovVA.html,
http://www.moskatov.narod.ru/Electronic_technics.html
40