

Урок №1
1 Основные понятия статики
Статика – часть теоретической механики, изучающая условия, при которых тело находится в равновесии, т.е. тело находится в покое или движется прямолинейно и равномерно.
Тело называют абсолютно твердым, если расстояние между любыми его точками не меняется при действии на него других тел.
Материальной точкой называется точка, имеющая массу. Абсолютно твердое тело представляет собой неизменяемую систему материальных точек.
Тело называется свободным, если никакие другие тела не препятствуют его перемещению в любом направлении ,если препятствуют – то несвободным или связанным (воздушный шар в покое – свободное, остальное несвободное).
Механическое взаимодействие тел, т.е. взаимодействие, влияющее на их состояние покоя или движения, характеризуется силами.
Сила – есть мера механического взаимодействия тел. Она характеризуется 3 элементами: числовым значением, направлением и точкой приложения. Сила – величина векторная. Числовое значение силы называется модулем вектора силы. Прямая линия, по которой направлен вектор силы, называется линией действия силы. В качестве единицы силы установлен Ньютон.
Ньютон есть сила, сообщающая телу массой 1кг ускорение 1м/с2 в направлении действия силы.
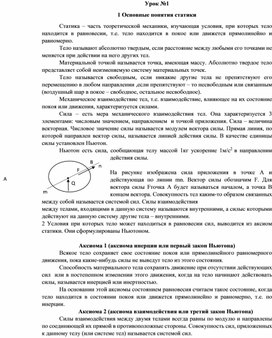
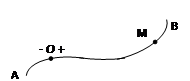
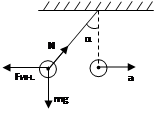
![]() На рисунке изображена
сила приложения в точке А и действующая по линии mn. Вектор силы обозначим F.
Для вектора силы Fточка А будет называться
началом, а точка В концом вектора. Совокупность тел каким-то образом связанных
между собой называется системой сил. Силы взаимодействия
На рисунке изображена
сила приложения в точке А и действующая по линии mn. Вектор силы обозначим F.
Для вектора силы Fточка А будет называться
началом, а точка В концом вектора. Совокупность тел каким-то образом связанных
между собой называется системой сил. Силы взаимодействия
между телами, входящими в данную систему называются внутренними, а силыс которыми действуют на данную систему другие тела – внутренними.
2 Условия при которых тело может находиться в равновесии сил, выводится из аксиом статики. Они сформулированы Ньютоном.
Аксиома 1 (аксиома инерции или первый закон Ньютона)
Всякое тело сохраняет свое состояние покоя или прямолинейного равномерного движения, пока какие-нибудь силы не выведут тело из этого состояния.
Способность материального тела сохранять движение при отсутствии действующих сил или в постепенном изменении этого движения, когда на тело начинают действовать силы, называется инерцией или инертностью.
На основании этой аксиомы состоянием равновесия считаем такое состояние, когда тело находится в состоянии покоя или движется прямолинейно и равномерно, т.е. по инерции.
Аксиома 2 (аксиома взаимодействия или третий закон Ньютона)
Силы взаимодействия между двумя телами всегда равны по модулю и направлены по соединяющей их прямой в противоположные стороны. Совокупность сил, приложенных к данному телу (или системе тел) называется системой сил.
Если какая-нибудь система сил обладает таким свойством, что после приложения к свободному телу она не изменит его механического состояния, то такая система называется уравновешенной.
Аксиома 3 (условие равновесия двух сил)
Для равновесия свободного твердого тела, находящегося под действием двух сил необходимо и достаточно чтобы эти силы были равны по модулю и действовали по одной прямой в противоположные стороны.
Аксиома 4
Равновесие твердого тела не нарушается если к нему приложить или удалить систему уравновешенной сил. Следствие из аксиомы 3 и 4.
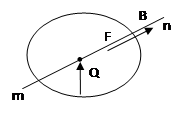
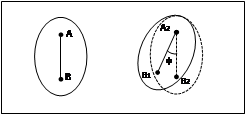
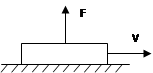
Механическое состояние твердого тела не нарушится от перемещения силы вдоль ее действия.
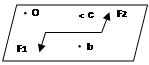
![]()
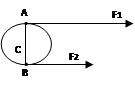
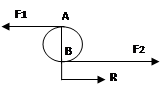
 На
основании аксиомы 4 силы Р1 и Р2 можно приложить к
На
основании аксиомы 4 силы Р1 и Р2 можно приложить к
телу, не нарушая его механического состояния. Соберем
![]() силы
Р1=Р2=Р
силы
Р1=Р2=Р
На основании аксиомы 4 отбросим силы Р и Р2, как взаимно уравновешенные, тогда оставшуюся силу можно рассматривать как силу Р1 перенесенную из точки А в точку В по линии действия причем механическое состояние не нарушается.
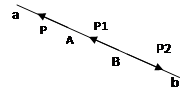
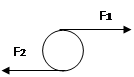
На основании следствия из аксиом 3 и 4 можно сказать, что две силы эквивалентны, если они равны по модулю и действию по одной прямой в одну сторону.

![]()
(Р1Р2)=(Q1Q2)
Два вектора силы равные если они одинаково направлены и имеют равные модули. Силы, эквивалентные данной системе сил называются равнодействующие. Уравновешенная система сил эквивалентна.
Аксиома 5
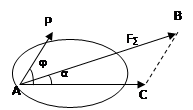
Равнодействующая двух сил, приложенных к телу в одной точке, равны по модулю и совпадают по направлению с диагональю параллелограмма, построенного на данных силах и приложена в той же точке.
Модуль и направление равнодействующей двух сил, приложенных в одной точке можно определить графически и аналитически.
![]()
![]() По теореме синуса:
По теореме синуса:![]() =P2+Q2-2PQcos
(π-φ)= P2+Q2+2PQcosφоткуда
модуль равнодействующей
=P2+Q2-2PQcos
(π-φ)= P2+Q2+2PQcosφоткуда
модуль равнодействующей ![]() =
=![]() P2+Q2+2PQcosφ
P2+Q2+2PQcosφ
По
теореме синусов: ![]() =
=![]() =
=![]()
Откуда
найдем направление равнодействующей sinα=![]()
1. Если φ=0 тогда FƩ=P+Q
2. Если φ=180̊, тогда FƩ=P-Q
3.
Если
φ=90̊, тогда FƩ=![]() 2+Q2
2+Q2
Урок №2
Тема: «Определение равнодействующей плоской системы сходящихся сил»
1. Система сходящихся сил
Система сил линии действия которых пересекаются в одной точке называют системой сходящихся сил. Различают плоскую систему сходящихся сил и пространственную. У плоской системы сходящихся сил все силы действуют в одной плоскости. Примером может служить басня Крылов, когда лебедь, рак и щука тянули груз.
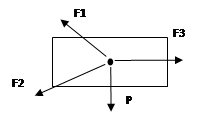 |
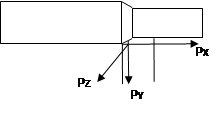
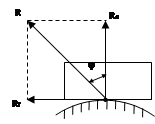
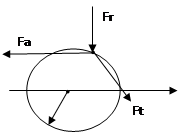
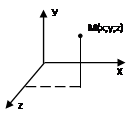
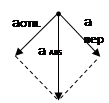
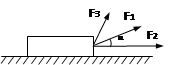
Пространственной называют систему сил, расположенных в различных плоскостях. Примером могут служить силы, которые возникают при точении на токарном станке. Там действуют 3 силы, расположенные в различных плоскостях, приложенных в одной точке. Рх – сила подачи действует в сторону противоположную движению резца. Ру – радиальная сила стремится отбросить резец и направлена вдоль резца.РZ – главная (тангенциальная) составляющая силы резания действует касательно к поверхности резания и совпадает с направлением главного движения.
 |
2. Сложение двух сил, приложенных в одной точке.
Графически решение определяется четвертой аксиомой. Аналитически с помощью теоремы косинусов или синусов.
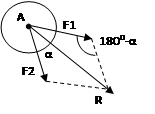
![]() =
=![]() +-
+-![]() -2F1F2cos
(180˚- α)
-2F1F2cos
(180˚- α)
cos (180˚- α) = - cosα,
тогдаR=![]() +
+![]() +2F1F2cosα
+2F1F2cosα
 или
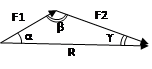
с помощью теоремы синусов:
или
с помощью теоремы синусов:
![]() =
=![]() =
=![]()
Отношения сторон любого треугольника к синусам противоположных углов есть величина постоянная.
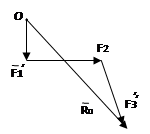
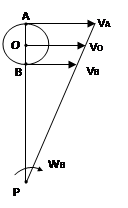
3. Определение равнодействующей пучка сил, приложенных в одной точке.
 |
Графически равнодействующую пучки сил определяют путем построения силового многоугольника. Берут произвольную точку О и из нее проводят вектор первой силы к нему присоединяют вектор второй силы и получаем ломаную линию, которую замыкают и получаем силовой многоугольник, замыкающая сторона и есть равнодействующая плоской системы сходящихся сил.
 |
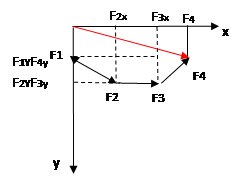
4. Аналитическое определение равнодействующей пучка сил.
Из точки О силового многоугольника проводим оси координат Х и У и проектируем. Данный силовой многоугольник на эти оси.
![]()
![]() Rx=F2x+F3x+F4x=
F∑x
Rx=F2x+F3x+F4x=
F∑x
Ry=F1y+F2y+F3y=F∑yR=![]() x2+Ry2=
x2+Ry2=![]() 2+(
2+(![]() )2
)2
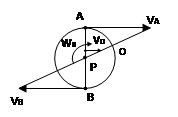
5.Геометрическое условие равновесия плоской системы сходящихся сил.
Для геометрического условия равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы многоугольник получился замкнутым.
Дан пучок сил и построим для него силовой многоугольник.

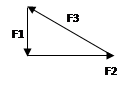 При
построении многоугольник получился
При
построении многоугольник получился
замкнутым Равнодействующая равна 0, т.к. нет замыкающей стороны.
6. Аналитическое условие равновесия.
Для аналитического условия равновесия необходимо и достаточно, чтобы равнодействующая была равна 0, R78=0 и Ry=0, т.е. ƹFix=0, ƹFiy=0
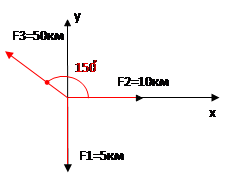
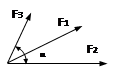
Задача. Определить равнодействующую
Решение:
 1.
Проводим оси координат.
1.
Проводим оси координат.
2. Определим проекцию равнодействующей на ось Х.Rx=ƹFiх=-F2-F3 cos30ͦ=-10-50·0,0866=-33,3км
3. Определяем проекцию равнодействующей на ось У.
Ry=ƹFiy=-F1+F3 cos60ͦ =-5+50·0,5=20км
4.
Определяем равнодействующую R=![]() 2+(ƹFiy)2=
2+(ƹFiy)2=![]() 2+202=
2+202=![]()
В треугольнике квадрат его стороны равен сумме квадратов двух других сторон, без удвоенного произведения этих сторон на косинус угла между ними.
 |
R2=F12+F22-2F1F2(cos 180ͦα)
Урок №3
1. Связи и реакции связей.
Тело считается свободным, если при своем перемещении оно не имеет никаких препятствий, т.е. данное тело или материальную точку ничто не удерживает и не препятствует его перемещению. Тело считается несвободным, если по пути своего перемещения имеет хотя бы одно препятствие. Данное препятствие (стол, провод, стенка, пол) называют связями, а сила, с которой эти связи удерживают материальную точку или тело называют реакциями связей.
2. Правило определения реакций идеальных связей
Связи бывают идеальные и реальные. Идеальными называют такие связи, у которых сила трения настолько мала, что ими пренебрегают. У реальных, силы трения значительные и ими пренебрегать нельзя.
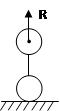
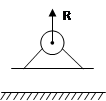
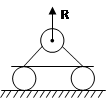
Реакции стержней, нитей и других гибких связей (тросов, цепей и т.д.) направлены вдоль этих связей.
 |
|||
 |
|||
-
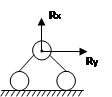
3. Разложение силы на две составляющие
Силу можно разложить на две составляющие в следующих случаях:
1. Задана сила и обе составляющие известны по модулю:
![]()
![]()
![]()
 |
|||||
![]()
2.
 Задана сила и обе
составляющие известны по направлению:
Задана сила и обе
составляющие известны по направлению:
3. Задана сила и одна из составляющих известна по модулю, другая по направлению:
 |
|||
4. Задана сила и одна из составляющих известна и по модулю, и по направлению:
 |
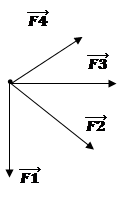
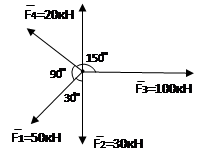
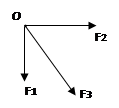
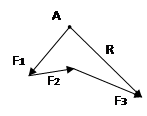
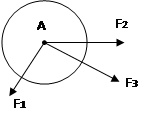
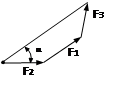
Для заданной системы сил найти равнодействующую. Задачу решить аналитически и графически.
Аналитическое решение:
1. Проводим оси координат через точку О и расставляем углы между осями.
2. Проектируем все силы на ось и определяем проекцию равнодействующей на этой оси.
Rx=ƹFix=-F1cos60ͦ-F4cos30ͦ+F3=-50·0,5 - 20 ·0,866+100=57,68км
Ry=Fiy=-F1 cos30·F2+F4cos60ͦ = - 50·0,866 -–30+20·0,5 =-43,3-30+10=-63,3км
3. По теореме Пифагора определяем равнодействующую
R=![]() x2+Ry2=
x2+Ry2=![]() 2+(ƹFiy)2=
2+(ƹFiy)2=![]() 2+(-63,3)2
2+(-63,3)2
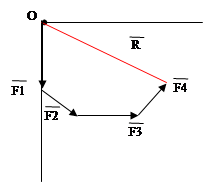
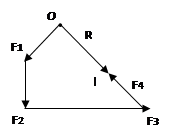
Графическое решение:
Из
произвольной точки О проводим прямую равную первой силе и на ней в выбранном
масштабе вектор первой силы М1=2![]() . Из конца вектора первой
силы проводим прямую равную вектору второй силы и на ней в том же масштабе
откладываем вектор второй силы.
. Из конца вектора первой
силы проводим прямую равную вектору второй силы и на ней в том же масштабе
откладываем вектор второй силы.
Урок №13
Тема: «Определение реакций стержневых систем»
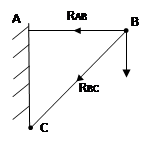
Задача. Определить реакции стержня для заданной стержневой системы (аналитически и графически)
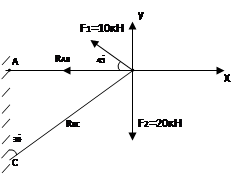
![]() 1.Наносим
реакции стержней RABи
RBC.
1.Наносим
реакции стержней RABи
RBC.
2.Проводим оси координат и записываем условие равновесия ƹFix=0, ƹFiy=0 (оси координат проводить лучше всего так, чтобы хотя бы один из стержней лежал на оси).
3.Составляем уравнение проекций оси на ось Х
![]() ƸFix=-F1·cos45ͦ
- RAB-RBC ·cos60ͦ=0
ƸFix=-F1·cos45ͦ
- RAB-RBC ·cos60ͦ=0
ƹFiy=F1·cos 45ͦ - F2-RBC ·cos 30ͦ=0
RBC=![]()
RAB=-F1·cos45ͦ- RBC·cos60ͦ = -10·0,707-15·0,5=-0,5
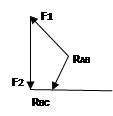
Графическое решение
Из произвольной точки О проводим вектор первой силы, затем к ней присоединяем вектор второй силы, т.е. строим ломаную линию для известных сил, затем из конца последней силы проводим прямую равной одной из реакций, а из начала первой силы равной второй реакции. Эти реакции пересекутся и мы получим реакции стержней.
 |
|||
 |
|||
Урок №14
Тема: «Пара сил и ее момент»
1. Сложение двух параллельных сил
 |
Две
равные силы, направленные в одну сторону имеют равнодействующую, направленную в
ту же сторону и равна алгебраической сумме этих сил, т.е. R=F1+F2,
а точка приложения равнодействующей делит отрезок соединяющий эти силы на части
обратно пропорциональные силам, т.е. ![]()
Равнодействующая двух равных сил, направленных в разные стороны равна разности этих сил и направлена в сторону большей силы, а точки приложения равнодействующей делит отрезок соединяющий эти силы внешним образом на части обратно пропорциональные силам и находится за большей силой.
R=F1-F2
2. Пара сил и ее момент
 Две
равные и направленные в разные стороны силы образуют пару
Две
равные и направленные в разные стороны силы образуют пару
сил. Пара сил не имеет равнодействующей R=F1-F2=0. Вращательное действие пары называют моментом, т.е. выполняет ту же самую роль что и сила, только сила перемещает, а момент вращает.
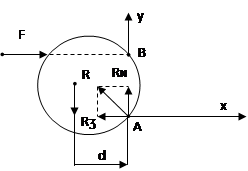
Моментом пары называют произведение одной силы пары на ее плечо. Плечом называется перпендикуляр, опущенный из бочки приложения одной силы пары на линию действия другой, т.е. M(F1-F2)=F1·d; где d–плечо.
Единица измерения момента М-метр. Момент пары векторная величина, т.е. характеризуется модулем, направлением вращения и плоскостью действия.
Будем считать момент пары положительным, если он поворачивает тело по часовой стрелке и отрицательным, если против.
Момент пары – скользящий вектор, т.е. его можно проводить из любого места в плоскости его действия.
3. Эквивалентность пар
Пару сил можно переносить из одной части плоскости в другую, но при этом момент является постоянным. Т.е. эти два пункта характеризуют эквивалентность пар. Эквивалентными парами называют также пары, у которых одинаковые модули, одинаковое направление вращения, одна и та же плоскость действия. Эквивалентные пары могут заменять друг друга.
4. Сложение пар
Момент равнодействующей пары равен алгебраической сумме моментов пар, действующих в той же плоскости, т.е. M(RR)=ƹM(FF)
Урок №15
Тема: «Плоская система произвольно – расположенных сил»
1. Момент силы относительно точки
Возьмем тело, к которому в точке А
приложена сила F. Данная сила будет тело
не только перемещать, но поворачивать относительно центра этого тела (точки
О). Моментом силы 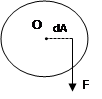 называется вращательное
действие этой силы относительно заданной точки. Момент силы будет равен
произведению этой силы на плечо. Плечом называют перпендикуляр, опущенный из
данной точки на линию действия этой силы.
называется вращательное
действие этой силы относительно заданной точки. Момент силы будет равен
произведению этой силы на плечо. Плечом называют перпендикуляр, опущенный из
данной точки на линию действия этой силы.
М(F)=F·d(4м).
Момент силы положителен, если он поворачивает тело по часовой стрелке и отрицателен, если против часовой. В отличие от момента пары, который относительно любой точки плоскости его действия постоянен, т.е. M(F1F2)=P·d, M(F1F20=-F1·dи т.д.
Момент силы относительно различных точек различен и может быть, положителен или равен 0.
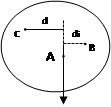
М(FC)=F·d, M(FB)=-F·d, MFA=F1·0=0, поэтому момент пары, есть
скользящий вектор, а момент силы сосредоточенный вектор, т.е. он справедливо, только для точки, относительно которой взят.
2. Приведение силы в заданную точку
 Пусть
силу Fнадо перенести
параллельно самой себе из точки А в точку
Пусть
силу Fнадо перенести
параллельно самой себе из точки А в точку
![]() О параллельно самой себе, но так чтобы действие
силы на тело не
О параллельно самой себе, но так чтобы действие
силы на тело не
изменится. Приложим в точке О взаимно уравновешенные силы F1 и F2
равные и параллельные F1. Т.к. силы взаимно уравновешенные, то
действие силы на тело не изменят. Тогда на тело будут действовать силы F, F1, образуют пару, момент которой будет равен М(FF1)=F·d и сила F2 равная по модулю и направлению силы F на тело не изменилось. Следовательно, чтобы перенести силу Fпараллельно самой себе, необходимо эту силу перенести в заданную точку, но при этом необходимо в заданной точке приставить пару сил.
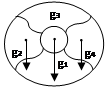
3.Приведение плоской системы сил к заданной точке
 Пусть
на тело действуют три силы,параллельно расположенные на теле F1,
F2, F3
приведём эти силы в заданный центр точку О. Приложим к точке О взаимно уравновешенные
силы F, Fравные
и параллельные силы F, аналогично проводим
взаимноуравновешенные силы F2
и F2. Тогда в точке О будут действовать
три силы и три пары. Сложим пары и найдём равнодействующую для сил F1,
F2, F3.
Пусть
на тело действуют три силы,параллельно расположенные на теле F1,
F2, F3
приведём эти силы в заданный центр точку О. Приложим к точке О взаимно уравновешенные
силы F, Fравные
и параллельные силы F, аналогично проводим
взаимноуравновешенные силы F2
и F2. Тогда в точке О будут действовать
три силы и три пары. Сложим пары и найдём равнодействующую для сил F1,
F2, F3.
M0꞊F·d+F2·d2+F3·d3꞊ƹFi·di
 |
![]()
 |
![]()
![]()
![]()
|
Значит относительно точки О будут действовать момент M0=ƹFidiи сила R0. Момент силы М0 будет называться числовым моментом, а сила R0–главным вектором. Они называются так потому, что заменяют действие сил F1,F2 и F3 вместе, а не каждый по отдельности.
Вывод: всякую плоскую систему произвольно расположенных сил всегда можно привести к одной силе и одному моменту, который будут над главным вектором и главным моментом. Аналитически главный вектор, определяемый через проекции на координатные оси.
R0=![]() 2+(ƹFiy)2.
2+(ƹFiy)2.
4. Условия равновесия плоской системы произвольно – расположенных сил
Для равновесия плоской системы произвольно-расположенных сил необходимо и достаточно чтобы главный вектор и главный момент были равны нулю.
М0=ƹМ=ƹМ=0
и R0=![]() 2+(ƹFiy)2=0
2+(ƹFiy)2=0
Главный момент будет равен 0, если ƹМi=0. Главный вектор будет равен 0, если ƹFix=0; ƹFiy=0 это есть первый вид условия равновесия.
Второй вид условия равновесия. Система будет находиться в равновесии, если алгебраическая сумма моментов относительно двух различных точек будет равна 0 и сумма проекций сил на одну из координатных осей будет равна 0, т.е.
ƹМA=0
ƹMB=0 и ƹFix=0
Третий вид условия равновесия. Система сил будет находится в равновесии, если алгебраические суммы моментов относительно трех различных точек, не лежащих на одной прямой, будут равны 0.
 ƹMA=0
ƹMA=0
ƹMB=0
ƹMC=0
При решении задач балочных систем будем пользоваться вторым условием равновесия. Для параллельных сил условием равновесия будем соблюдать, если сумма моментов относительно двух точек будет равна 0: ƹMA=0 и ƹMB=0.
5.Классификация нагрузок
При решении задач различают следующие виды нагрузок: статические и динамические, сосредоточенные и распределительные внешние и внутренние, активные и реактивные.
Статическими называют такие нагрузки, которые медленно возрастают до своего максимального значения, а затем либо совсем не изменяются, либо изменяются очень незначительно. Например, давление здания на фундамент.
Динамические это такие нагрузки, которые резко меняются как по величине, так и по направлению. Например, удар молотком.
Сосредоточенные нагрузки - это такие нагрузки, которые приложены в точке и обозначаются буквой F, а единица измерения Н.
Распределенными
нагрузками называют такие нагрузки, которые распределяют по длине, площади или
объему. Нагрузки распределенные по длине обозначаются буквой q
и имеют единицу измерения ![]() . Например, давление
цилиндра на плоскость.
. Например, давление
цилиндра на плоскость.
Нагрузка,
распределенная по площади так же обозначается буквой q
и имеет единицу измерения ![]() 2.
2.
Объемные
нагрузки q![]() 3
к таким нагрузкам относятся объемные веса массивных тел.
3
к таким нагрузкам относятся объемные веса массивных тел.
Внешними (активными) называют такие нагрузки, которые возникают со стороны внешних тел. Внутренние (реактивные) возникают под действием внешних нагрузок, вызывающих взаимодействие частиц одного и того же тела между собой.
Нагрузки постоянные, действуют на тело постоянно (давление стены на здание), перемещенные нагрузки с течением времени исчезают (снег, давление ветра и т.д.)
6.Опоры балочных систем
В балочных системах различают следующие виды опор: шарнирно-подвижная, шарнирно-неподвижная и опора жесткая заделка или закрепление.
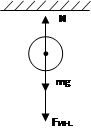
Шарнирно-подвижная
опора изображается так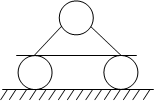 :
:

![]() Такая опора
допускает поворот вокруг шарнира и линейное перемещение
Такая опора
допускает поворот вокруг шарнира и линейное перемещение
Такую опору заменяют реакцией, которая приложена в центре шарнира и направлена перпендикулярно опорной поверхности.
 |
|||||
 |
|||||
 |
|||||

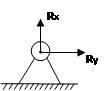
 Шарнирно – неподвижная
опора. Кинематически изображается следующим образом:
Шарнирно – неподвижная
опора. Кинематически изображается следующим образом:
Такая опора допускает поворот вокруг шарнира, но не допускает линейных перемещений. Заменяют такую опору двумя соответствующими реакциями, которые приложены в центре шарнира, одна из которых направлена перпендикулярно опорной поверхности, другая параллельно опорной поверхности.
 |
|||
 |
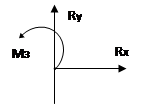
Опора жесткая заделка или защемление. Кинематически изображается такая опора:
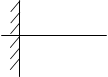 Такая
опора не допускает ни поворотов, ни линейных перемещений.
Такая
опора не допускает ни поворотов, ни линейных перемещений.
Такую опору заменяют двумя составляющими реакциями, которые
приложены в начале заделки и моментам, которые называются моментом заделки.
7.Определение реакций опор балочных систем
Для определения реакций опор балочных систем запомним следующие правила:
1. момент, сосредоточенный силы приложенный перпендикулярно к оси балки равен произведению этой силы на расстояние от точки приложения заданной силы до заданной точки.
2.Чтобы получить момент силы, действующей под углом к балке, необходимо вначале эту силу умножить на cos угла между силой и осью перпендикулярной к оси балки и на расстояние от точки приложения заданной силы до заданной точки.
3,Чтобы получить момент от распределенной нагрузки необходимо эту нагрузку умножить на свою длину и умножить на расстояние от центра распределенной нагрузки до заданной точки.
4.Момент в уравнениях прибавляется или отнимается в зависимости от знака и ни на что не умножается.
5.Силы, приложенные в заданной точке при составлении уравнения моментов относительно этой точки, не учитываются.
6.Чтобы спроектировать распределенную нагрузку на ось необходимо эту нагрузку умножить только на ее длину.
Урок №16
Тема: «»
1. Основные законы трения
Первый закон. При стремлении одного тела сдвинуть по поверхности другое в плоскости соприкосновения этих тел возникает сила трения, которая меняется от О до так называемой предельной силой трения.
Второй закон. Сила трения прямо пропорциональна статическому коэффициенту трения и нормальному давлению (нормальной реакции).
F=N·t0; где t0 – статический коэффициент трения.
N0- нормальное давление (Н, кН)
 |
Третий закон. Сила трения направлена в сторону противоположную движению.
Четвертый закон. Сила покоя больше силы трения движения (т.е. в движении сила трения применяется).
Пятый закон. Сила трения в большинстве случаев во всех направлениях одинакова (деревянные брусья вдоль и поперек волокон не одинаковы).
Шестой закон. Сила трения в большинстве случаев не зависит от размеров поверхности, а зависит от состояния поверхности и материала.
Различают два вида трения: трение скольжения и трение качения.
Трение качения называют сопротивлением перекатывания одного тела по поверхности другого.
2. Угол и конус трения
Связи, в которых возникают силы трения называются реальными связями. При определении реакций реальных связей, реакция этой связи будет отклонена от нормальной реакции на некоторый угол. Угол, на который отклонена реакция реальной связи называется углом трения, который меняется от 0 до своего значения так называемым предельным углом трения. Тандем предельного угла трения равен статическому коэффициенту трения.
 |
Поскольку трение во всех направлениях одинаково, то конус, образующие которого наклонение под углом трения и к нормам к поверхности скольжения в данной точке называется конусом трения.
3. Трение качения
Трением качения называется сопротивление перекатыванию одного тела по поверхности другого. Момент трения качения вырастет с увеличением вращающего момента, но не может превзойти некоторого значения, вполне определенного для данной пары соприкасающихся поверхностей и данной силы давления катка на плоскость.
 Rnd ≤βRn, где β-
коэффициент пропорциональности
Rnd ≤βRn, где β-
коэффициент пропорциональности
называемый коэффициентом трения качения.
Величина Rnd – называется моментом трения качения.
Коэффициент трения качения зависит от упругих свойств
материалов, трущихся тел и состояния поверхности.
Урок №17
Тема: «Пространственная система сходящихся сил»
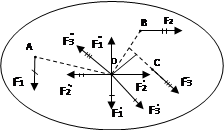
1. Сложение трех взаимно перпендикулярных сил
Пространственной системой сходящихся сил называют такую систему, линии действия которых расположены в различных плоскостях, но пересекаются в одной точке.
Рассмотрим сложение трех взаимно перпендикулярных сил, то найдем их равнодействующую.
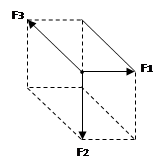
Три взаимно перпендикулярные силы, приложенные в одной точке имеют момент равнодействующую, приложенную в той же точке, которая изображается диагональю прямоугольного параллелепипеда, построенного на векторах как его сторонах.
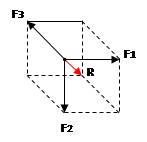
 Аналитически
определяется равноде-
Аналитически
определяется равноде-
йствующая по правилу, которое
читается так: квадрат диагонали
прямоугольного параллелепипеда
равен сумме квадратов трех его
измерений.
R2=F12+F22 +F32
R=![]() Fi2+F22+F32
Fi2+F22+F32
2. Разложение силы на три взаимно перпендикулярные координатные оси
Чтобы разложить силу на три взаимно перпендикулярные оси необходимо эту силу вначале спроектировать на плоскости, а затем проектировать на координатной оси.
Если действует система сил, то для определения равнодействующей необходимо каждую силу спроектировать на координатные оси и найти проекцию равнодействующей на каждый из координатных осей, т.е.
Rx=ƹFixcosαRy= ƹFiy
R= ![]() Rx2+Ry2+Rz
Rx2+Ry2+Rz![]() 2+
(ƹFiy)2+(ƹFiz)2
2+
(ƹFiy)2+(ƹFiz)2
Для аналитического условия равновесия необходимо и достаточно чтобы R=0
R=0 если ƹFix; ƹFiy ƹFiz=0
Урок №18
Тема: «Пространственная система произвольно расположенных сил»
1. Момент силы относительно оси
Моментом силы относительно оси называют произведение этой силы на плечо. Плечом называют кратчайшее расстояние между линией действия силы и осью.
Следует помнить, что сила равна оси или пересекающая ось момента относительно этой оси не создает.
ƹMx=F2·a
ƸM2=F2·a
– Fa·![]()
Где Fa – осевая сила
Fr= радиальная сила
Ft – окружная
Будем считать момент силы положительным, если он поворачивает эту силу со стороны направления оси по часовой стрелке, отрицательным если против.
2. Приведение к заданному центру
Можно всегда привести к главному вектору и главному моменту. Главный вектор определяется
R0=![]() 2)
+(ƹFiy) +(ƹFiz)2
2)
+(ƹFiy) +(ƹFiz)2
Главный момент
М0=![]() 2+(ƹMiy)2+(ƹMiz)2
2+(ƹMiy)2+(ƹMiz)2
3. Условие равновесия
Для аналитического условия равновесия пространственной системы произвольно расположенных сил необходимо и достаточно, чтобы главный вектор и главный момент были равны 0.
R0=0 и М0=0 или ƹFix =0 ƹFiy=0 ƹFiz=0 или ƹMix=0 ƹMiy=0 ƹMiz=0
Урок №19
Тема: «Центр тяжести»
1. Центр тяжести параллельных сил
Возьмем параллельные силы, приложенные в точках О1, О2, О3 и направленные в одну сторону. Найдем равнодействующую для этих сил сначала сложим силы F1 и F2.
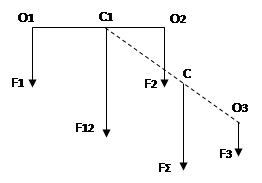
Равнодействующая этих сил будет равна сумме этих сил, а точка приложения этой равнодействующей будет делить отрезок, соединяющий эти силы на части обратно пропорциональные этим силам, т.е. F12=F1+F2. Затем сложим силы F12 и F3 будем иметь
Fƹ=F12+F3=F1+F2+F3=ƹFi
Точка, приложенная к равнодействующей Fƹназывается центром параллельных сил, т.к. если повернуть силы на какой то угол, то и равнодействующая, приложенная в той же точке повернется на тот же угол.
Координаты центра параллельных сил определяются по формулам
ХС=![]() YC=
YC=
![]()
2. Понятие о центре тяжести тела
Возьмем шар. Он состоит из множества элементарных частиц. Каждая такая частица притягивается к центру земли с силой, которая называется силой тяжести. Алгебраическая сумма этих элементарных сил тяжести называется весом тела. Т.к. сила тяжести равна, то их равнодействующая будет приложена в центре параллельных сил. Этот центр параллельных сил называется центром тяжести.
P=ƹq·V1
Координаты центра тяжести объемного тела определяются по формулам:
Хс=ƹ![]() =
=![]()
Yc=![]() c=
c=![]()
Если тело имеет форму тонкой пластины, то ее вес можно выразить через площадь P= ʃ·Fi; где ʃ- вес одного квадратного метра тела (мм, см); Сl–площадь
ХС=
![]()
3. Центр тяжести простых геометрических фигур
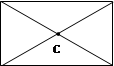
Центр тяжести прямоугольника, параллелограмма, ромба лежит в точке пересечения их диагоналей.
 |
|||||
 |
 |
||||
Для
треугольника центр тяжести лежит в точке пересечения медиан и находится на
расстоянии ![]() от оси.
от оси.
 |
Центр тяжести окружности находится в его центре.
 |
Центр тяжести полуокружности находится на оси симметрии и на расстоянии 0,424Rот диаметра.
 |
Ось симметрии обладает следующим свойством: каждой точке тела расположенной по одну сторону от оси симметрии соответствует точно такая же точка по другую сторону симметрии.
Центр тяжести симметричных фигур расположен в точке пересечения осей симметрии.
ЗАДАЧА.
Определить положение центра тяжести фигуры тонкой пластины, составленной из простых геометрических фигур.
Решение:
1. Разбиваем сечение на простые геометрические фигуры прямоугольник I, треугольник II, окружность III.
2. Определяем положение центра тяжести каждой простой геометрической фигуры и находим координаты их осей.
3. Определяем площади каждой простой геометрической фигуры.
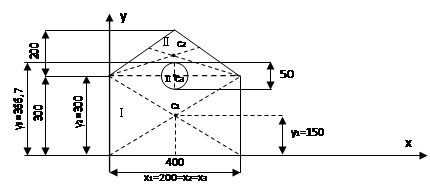
А1=400·300=120000мм2
А2=![]() ·400·200=40000мм2
·400·200=40000мм2
А3=ПR2=3,14·252=19625мм2
4.Определяем координаты центра тяжести всего сечения.
ХС=![]() =
=![]() =
=![]() =200 мм
=200 мм
УС=![]() =
=![]() =
= ![]() =
=![]() =202,98 мм
=202,98 мм
Урок №20
Тема: «Основные понятия кинематики»
1. Основные понятия кинематики
Кинематикой называют раздел теоретической механики, изучающая геометрические свойства движения материальных точек и тел без учета причин вызвавших данное движение. Под причинами понимают силовые факторы, вызывающие движение. Под геометрическими характеристиками понимают основные понятия кинематики (траектория, расстояние, путь, время, скорость и ускорение). Понятия движение и покой относительные. Так например, самолет, летящий на широте 60֯из Красноярска в Минводы по отношению к солнцу будет находиться в покое, если его скорость 960 км/ч, т.е. он вылетает из Красноярска в 12:00 по московскому времени, не будет находиться в зените. Поэтому для того, чтобы определить движется ли тело или находится в состоянии покоя, необходимо иметь систему отчета. Твердое тело, по отношению к которому с помощью системы координат определяется положение других тел в разные моменты времени называется системой отчета. Для того, чтобы определить движется автомобиль или стоит на месте, мы выбираем столб или здание и определяем имеются ли координаты по отношению выбранной системы отчета или нет, если меняется, то тело находится в движении. Под механическим движением понимают непрерывные изменения положения тела во времени и пространстве.
К основным понятиям кинематики относятся: траектория, расстояние, путь, время скорость и ускорение.
Траектория – геометрическое место точек в системе отсчета, которое описывает тело, скорость и ускорение.
Расстояние – геометрическое место точек, замеренное в км, м, см или мм на траектории движения.
Путь – расстояние, пройденное материальной точкой или телом по траектории движения в одну сторону от системы отсчета.
Скорость – физическая величина, характеризующая быстроту движения материальной точки или тела.
Ускорение – физическая величина, характеризующая величину изменения скорости в единицу времени.
Время – универсальная величина во всех системах отсчета одинакова и измеряется в сек, часах или минутах.
Различают следующие понятия времени: начальный момент времени, данный момент времени и промежуток времени.
Начальный момент в каждом конкретном случае выбирается самостоятельно. Например, за начало действующих суток принят конец действующих суток.
Данный момент характеризуется числом секунд, прошедших от начального момента времени.
Промежуток времени характеризуется числом секунд между двумя данными моментами времени.
2. Способы задания движения точки
Различают следующие виды задания движения точки: естественный, координатный, векторный.
Естественный способ
 Предположим,
что точка совершает движение по некоторой траектории АВ.
Предположим,
что точка совершает движение по некоторой траектории АВ.
Возьмем произвольную точку О и назовем ее началом
отсчета. Длина дуги ОМ называется ее дуговой
координатой обозначим эту дугу буквой sв отличие
от пути, которое обозначают буквой S. За положительное направление будем принимать сторону, куда движется точка или тело. В каждый данный момент, точка может занимать только одно определенное положение на траектории и следовательно ее расстояние Sот начала отсчета есть некоторая однозначная функция от времени tи выражается уравнением S=ʃ(t), которое называется уравнением движения.
Координатный способ
Координатный способ основан на том, что положение точки относительно некоторой системы отсчета всегда задана координатами, которые при движении точки изменяются с течением времени, т.е. представляют собой функцию от времени.
Х=ʃ(t);Y=ʃ(t); Z=ʃ(t)
Если известны уравнения движения, то мы всегда можем
определить ее положение относительно данной системы отсчета.
При плоском движении материальной точки, ее координаты задаются двумя уравнениями.
Х=ʃ(t) и у=ʃ(t)
Урок №21
Тема: «Определение скоростей и ускорений при движении материальной точки»
1. Виды движения
В зависимости от траектории движения различают прямолинейное и криволинейное движение. У прямолинейного траектория прямая линия, у криволинейного любая кривая (окружность, синусоида, парабола, гипербола и т.д.). Проще всего скорость определяется при прямолинейном равномерном движении, когда точка в равные промежутки времени проходит одинаковые отрезки пути. Скорость будет определяться отношением пути ко времени.
U=![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]()
Однако чаще всего тела движутся неравномерно, поэтому пользуются понятием средней скорости, это когда весь пройденный путь делят на время.
 Кроме
средней скорости различают понятие скорости в данный момент времени. Рассмотрим
движение точки по криволинейному участку пути.
Кроме
средней скорости различают понятие скорости в данный момент времени. Рассмотрим
движение точки по криволинейному участку пути.
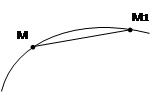
Пусть точка из положения М за элементарный промежуток времени переместилась из
положения М в положение М1 и прошла путь равный дуге ММ1. Заменим движение по дуге движением по хорде ММ1 и определим среднюю скорость.
UC=![]() =
=![]() и вектор Ucбудет
направлен по хорде в сторону движения точки. Будем приближать точку М1 к точке
М вместе с вектором скорости.
и вектор Ucбудет
направлен по хорде в сторону движения точки. Будем приближать точку М1 к точке
М вместе с вектором скорости.
При
![]() М, а вектор скорости
совпадет с хордой и мы получим скорость в данной точке, т.е. U=
М, а вектор скорости
совпадет с хордой и мы получим скорость в данной точке, т.е. U=![]() ;
; ![]() =
=![]() ; а это есть первая
производная от пути ко времени.
; а это есть первая
производная от пути ко времени.
Следовательно, скорость в данный момент времени определяется как первая производная от пути ко времени и направлена по касательной к траектории движения.
2. Ускорение точки
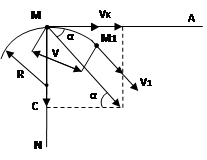
Пусть
точка движется по криволинейной траектории и в некоторый момент в положении М
имела скорость U. За элементарный
промежуток ![]() она переместилась в М1 и
имела скорость U1. Перенесем вектор
скорости U1 из положения М1 в
положение М параллельно самому себе. Соединим концы векторов Uи
U1, получим приращение вектора
скорости Uза промежуток времени
она переместилась в М1 и
имела скорость U1. Перенесем вектор
скорости U1 из положения М1 в
положение М параллельно самому себе. Соединим концы векторов Uи
U1, получим приращение вектора
скорости Uза промежуток времени ![]() (UU1).
Проведем через точку М касательную МА и нормаль МN.
Спроектируем отрезок UU1
на касательную и нормаль. Отрезок UKесть
касательное приращение вектора скорости за промежуток времени
(UU1).
Проведем через точку М касательную МА и нормаль МN.
Спроектируем отрезок UU1
на касательную и нормаль. Отрезок UKесть
касательное приращение вектора скорости за промежуток времени ![]() . Отрезок МС – нормальное
приращение вектора за тот же самый промежуток времени.
. Отрезок МС – нормальное
приращение вектора за тот же самый промежуток времени.
 Отношение
касательного приращения скорости к
Отношение
касательного приращения скорости к
промежутку времени за которое данное прира-
щение произошло, есть среднее касательное
ускорение.
an = ![]()
Предел отношения из данного выражения есть
касательное ускорение в данный момент
времени.
an= ![]()
Касательное ускорение направлено на изменение величины скорости.
Отношение нормального приращения скорости к промежутку времени за которое данное приращение произошло называется средним нормальным ускорением.
anср=
![]()
Предел отношений из данного выражения есть нормальное ускорение в данный момент времени.
an = ![]()
3. Вывод формул нормального, касательного и полного ускорений
Вектор UKбудет равен UK=MK-U
Из
![]() момента угла cosαбудет
равен 1 и VK=V+V=
момента угла cosαбудет
равен 1 и VK=V+V=![]() ,
тогда тангенциальное ускорение будет равно =
,
тогда тангенциальное ускорение будет равно = ![]() =
=![]()
Тангенциальное
ускорение равно первой производной от скорости ко времени. Из ![]() определим МС.
определим МС.
МС=U1·sinα=U1α
Ввиду момента угла sinα=0; т.к. α к нулю приравнять нельзя, то найдем этот угол.
α
= ![]() ; тогда МС = U1
; тогда МС = U1
![]() ; подставим в уравнение
нормального ускорения будем иметьan
=
; подставим в уравнение
нормального ускорения будем иметьan
= ![]() при этом
при этом ![]()
Вынесем
постоянные Uи Rбудем
иметь аn = ![]() ·
·![]() =
=![]() ·
·![]() =
=![]()
Т.е. нормальное ускорение равно квадрату скорости, поделенному на радиус. Полное ускорение будет равно, т.к. касательное и нормальное ускорение взаимно перпендикулярны, то полное ускорение определяется по теореме Пифагора.

а = ![]() с2+an2
с2+an2
Урок №22
Виды движения в зависимости от ускорений
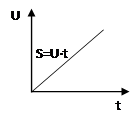
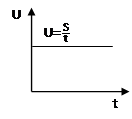
1. Прямолинейное равномерное движение
При таком движении R=0 следовательно an=0
an=![]() =0, тангенциальное
ускорение равно 0
=0, тангенциальное
ускорение равно 0
аn=
0; а = ![]() =0 ; скорость точки будет
равна U=
=0 ; скорость точки будет
равна U= ![]() . Разобьем переменные и
будем иметь ds=U·dt,
ʃds=ʃU·dt;
интеграл из dsесть S.
U
. Разобьем переменные и
будем иметь ds=U·dt,
ʃds=ʃU·dt;
интеграл из dsесть S.
U![]() огда интеграл из dtесть
t, будем иметь S=U·t,
отсюда U=
огда интеграл из dtесть
t, будем иметь S=U·t,
отсюда U=![]() (
(![]() ;
; ![]() ;
; ![]() )
)
Графики прямолинейного равномерного движения
 |
|||||
 |
|||||
 |
|||||
Человек движется равномерно и за 30 мин проходит путь равный 2,5 км. Определить скорость движения человека.
U=![]() =
=![]() =5 км/ч
=5 км/ч
2. Равнопеременное прямолинейное движение
R=0, an=
0, an![]()
an=![]() Разобьем переменные и
проинтегрируем данное выражение
Разобьем переменные и
проинтегрируем данное выражение
Du=a
·dt , ʃDu=ʃadt
– интеграл из dU![]() то его выносим за знак
интеграла, а интеграл из dt-t
то его выносим за знак
интеграла, а интеграл из dt-t
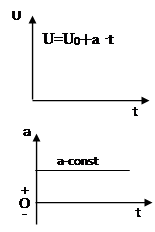
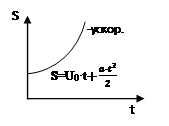 U=a
·t+U0,
где U0
– постоянная интегрирования переменная будем иметь U=U0
U=a
·t+U0,
где U0
– постоянная интегрирования переменная будем иметь U=U0![]() dt.
Найдем путь, пройденный при прямолинейно равнопеременном движении.
dt.
Найдем путь, пройденный при прямолинейно равнопеременном движении.
U=![]() ; отсюда ds=U·dtили
если вместо Uподставим данное
выражение, то будем иметь ʃds=ʃU0·dt
; отсюда ds=U·dtили
если вместо Uподставим данное
выражение, то будем иметь ʃds=ʃU0·dt![]() ʃa·t·dt,
т.е.S=U0·t
ʃa·t·dt,
т.е.S=U0·t![]() U=U0
U=U0![]() a ·t
a ·t
 |
1)
 |
 |
||
2)
3)
Задача
Автомобиль двигаясь со скоростью U0=36 км/ч. В некоторый момент начал двигаться равноускоренно и за 10сек его скорость достигла 30 м/с. Определить ускорение и путь, пройденный автомобилем за 10 секунд.
а
= ![]() =
=![]() =2м/с2
=2м/с2
S=U0t
+ ![]() =10·10+
=10·10+ ![]() =200м
=200м
Задачи
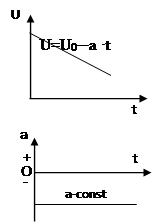
Автомобиль двигаясь со скоростью 108км/ч в некоторый момент времени затормозил и двигаясь равнозамедленно через 5 секунд остановился. Определить замедление и тормозной путь автомобиля.
S=U0t-![]()
U=U0-a ·t
a = ![]() =
=![]() 2
2
S = 30 ·5 - ![]() =150-75=75 м
=150-75=75 м
3. Неравномерное прямолинейное движение
При
таком движении R=0; следовательно a
= 0, a = ![]() ; U=
; U=
![]()
Задача
Точка движется согласно уравнения S=0,2t2. Определить скорость ускорения и путь, пройденный материальной точкой в конце 10сек.
S=0,2t2 = 0,2 ·102= 20м
U=(10,2t2) = 0,4 ·t = 0,4 ·10=4м/с
а = U = (0,4t)=0,4м/с2
Задача
Точка движется про криволинейной траектории радиуса R=50 м согласно уравнению S=0,1t3. Определить скорость, нормальное, тангенциальное и полное ускорение, а также путь, пройденный точкой за t=10сек.
S=0,1 ·103=100м; U=S=0,2t2=20м/с
а
= U=(0,2t2)
– 0,4 ·10=4м/с2; а = ![]()
а
= ![]() 2+82=
2+82=![]() 2
2
Задача
Точка движется по криволинейной траектории R=10 м согласно уравнению S=2t. Определить путь, скорость и полное ускорение в конце 5сек после начала движения.
S=2,5 =10м
U=S=(2t)=2м/с
а = U=(2)=0 – движение равномерное
а
= ![]() 2
2
а = а = 0,4м/с2
Урок №23
Тема: «Поступательное движение твердого тела»
Поступательным движением твердого тела называется такое движение, при котором любая прямая взятая на этом теле во все время движения остается параллельной самой себе. По законам поступательного движения перемещаются кузова автомобилей, движение поршня двигателя и т.д.
При поступательном движении все точки тела описывают параллельные или тождественные прямые и кривые. Следовательно, при поступательном движении все точки тела имеют одинаковые скорости и ускорения. Скорость определяется как первая производная от пути ко времени, а ускорение как первая производная от скорости ко времени. Т.к. при поступательном движении твердого тела все скорости и ускорения точек одинаковы, то обычно задают движение одной точки, обычно центра тяжести. Следует помнить, что поступательное движение совершает твердое тело, а не материальная точка.
UA=UB=…UC=![]()
 a = aB=…aC=
a = aB=…aC=![]()
Урок №24
Тема: «Вращательное движение твердого тела»
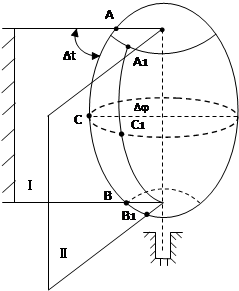 Вращательным движением
твердого тела называют такое движение, при котором каждая точка этого тела во
все время своего движения описывает окружности в плоскости перпендикуляра к оси
вращения. Пусть твердое тело вращается вокруг неподвижной оси и за некоторый
элементарный промежуток времени
Вращательным движением
твердого тела называют такое движение, при котором каждая точка этого тела во
все время своего движения описывает окружности в плоскости перпендикуляра к оси
вращения. Пусть твердое тело вращается вокруг неподвижной оси и за некоторый
элементарный промежуток времени ![]() получила приращение угла
поворот
получила приращение угла
поворот ![]() . За систему отсчета
принимаем плоскость I. Тогда все точки этого
тела повернутся на
. За систему отсчета
принимаем плоскость I. Тогда все точки этого
тела повернутся на
тот же самый угол ![]() . Т.е. угол поворота для
. Т.е. угол поворота для
любой точки этого тела будет одним и тем
же. Отношение приращения угла поворота к
промежутку времени за которое данное
приращение произошло называют средней
угловой скоростью.
Wср=![]()
Угловая скорость в данный момент будет
равна первой производной от угла
поворота ко времени:
W=![]()
Угловая скорость для всех точек тела одна
и та же.
WA=WB=WC=![]()
Пусть
за тот же промежуток времени произошло приращение угловой скорости на величину ![]() . Тогда приращение
угловой скорости к промежутку времени, за которое данное приращение произошло
называют средним угловым ускорением.
. Тогда приращение
угловой скорости к промежутку времени, за которое данное приращение произошло
называют средним угловым ускорением.
Еср=![]()
Ускорение в данный момент времени определяется как первая производная от угла поворота ко времени.
Ер=![]()
Различают равномерное, равнопеременное и неравномерное вращение.
1. Равномерное вращение
При
равномерном Е=0, W-const;
тогда W=![]()
Разобьем переменные и будем иметь du=W·dt, проинтегрируем данное выражение и получим ʃdu=ʃw·dt; u=w·t+u0
Если
тело вращается из состояния покоя, то u0=0,
тогда w=![]()
Uза один оборот = 2П, тогда w=![]()
Если тело совершает п оборотов, тогда uп=2П·п. Обычно П задают в об/мин, тогда t=1мин=60сек
W=![]()
2. Равнопеременное вращение
При
таком вращении Е![]() . Определим угловую скорость
вращательного движения
. Определим угловую скорость
вращательного движения
Е=![]() переменные и получим dw=E·dt.
Проинтегрируем данное выражение, будем иметь ʃdw=ʃEdt,
w=E·t+w0
переменные и получим dw=E·dt.
Проинтегрируем данное выражение, будем иметь ʃdw=ʃEdt,
w=E·t+w0
W0- начальная угловая скорость величина постоянная
w=w0![]() 0
– const, E
0
– const, E ![]()
w=![]()
Подставим
wи определим угол поворота w0+Et=![]() отсюда du=(w0+Et)·dt
отсюда du=(w0+Et)·dt
Проинтегрируем угол поворота. При вращении из состояния покоя u0=0
3. Неравномерное вращение твердого тела
При
таком вращении w=![]() , E=
, E=![]()
Урок №25
Тема: «Скорости и ускорения точек, движущихся по окружности»
1. Скорости точек вращающегося тела
При вращении тела вокруг неподвижной оси все его точки описывают окружности, лежащие в плоскостях, перпендикулярных к оси вращения. Центры этих окружностей лежат на оси вращения и, следовательно, радиус каждой из них равен расстоянию соответствующей точки тела от оси вращения. Численное значение скорости точки равно производной ко времени от расстояния Sданной точки от начала отсчета.
U=![]()
 По
длине дуга окружности равна ее радиусу, умноженному на соответствующий угол в
радианах, т.е.
По
длине дуга окружности равна ее радиусу, умноженному на соответствующий угол в
радианах, т.е. ![]() =z
=z![]()
Отсюда
U=![]()
Численное значение скорости точки вращения тела равно произведению угловой скорости тела на расстояние данной точки от оси вращения U=z·w
U=z·w=![]() – диаметр вращающегося
цилиндрического тела; п – число оборотов тела в минуту
– диаметр вращающегося
цилиндрического тела; п – число оборотов тела в минуту
Ускорение точек вращающегося тела
При любом вращательном движении тела скорость его точек изменяется, следовательно, точки вращающегося тела движутся с ускорением. Ускорение точек вращающегося тела может быть разложено на касательное и нормальное.
а
= ![]()
a = ![]() 2
2
Численное значение касательного ускорения точки вращающегося тела равно произведению углового ускорения тела на расстояние данной точки от оси вращения.
а = zE
Численное значение нормального ускорения точки вращающегося тела равно квадрату угловой скорости тела, умноженному на расстояние данной точки от оси вращения.
а = zw2
 |
|||
 |
|||
Тема: Относительное, переносное и абсолютное движение
Если точка одновременно участвует в двух или нескольких движениях, то такое движение называется сложным.
В сложном движении имеются системы отсчета: неподвижная (земля) и подвижная (движущиеся тела).
В сложном движении имеются три вида движений: относительное, переносное, абсолютное.
Движение точки по отношению к подвижной системе отсчета называют относительным движением. Движение подвижной системы отсчета по отношению к неподвижной системе отсчета называется переносным движением.
Движение точки в месте с подвижной системой отсчета по отношению к неподвижной называют абсолютным движением.
Пример: человек находится в движущемся поезде.
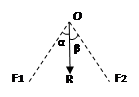
Скорости и ускорения
В зависимости от видов движения различают: переносную, относительную и абсолютную скорости и ускорения, при этом относительные и переносные скорости и ускорения могут быть расположены друг по отношению к другу под любым углом.
Скорость и ускорение в абсолютном движении называются абсолютной Uи a.
Uи а в переносном движении называются переносной Uи а.
U и а в относительном движении называются относительной U и а.
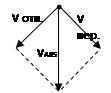
UABC=![]() OTH2+Vпер2+2Vотн
– Vперcosα
– по теореме косинусов.
OTH2+Vпер2+2Vотн
– Vперcosα
– по теореме косинусов.
При α=0
Vaбс=Vпер+Vотн
α = 90ͦ
Vабс=![]() отн2+Vпер2
отн2+Vпер2
α = 180ͦ
Vабс=Vотн2+Vпер
а
абс=![]() апер2+аотн2+аперcosα
апер2+аотн2+аперcosα
α = 0
aабс = апер+аотн
α = 90ͦ
аабс=![]() аотн2+апер2
аотн2+апер2
α = 180ͦ
аабс=аотн-апер
Задача
Вертолет поднимается вертикально вверх со скоростью 10 км/ч. Точки мотора движутся с угловой скоростью 300об/мин. Определить Vабс точек мотора от стоящих от оси на расстоянии 0,5 мм.
V=w·z
W=![]()
Vотн=3,14·0,5=15,7 м/с
Vпер=![]()
Vабс=![]() Vотн2+Vпер2=
Vотн2+Vпер2=
![]() 15,72+2,7
15,72+2,7![]()
Тема: Понятие о плоскопараллельном движении твердого тела
Плоское движение
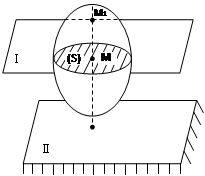
Плоскопараллельным движением твердого тела называют такое движение, при котором плоская фигура, образованная от пересечения плоскостью параллельной некоторой неподвижной плоскости II во все время движения остается в этой плоскости.
Плоское движение совершают многие части механизмов
и машин. Частным случаем плоскопараллельного движения является вращательное движение. Рассмотрим сечение S,расположенной в плоскости I, которая параллельна неподвижной плоскости II. При плоскопараллельном движении все точки тела, лежащие на прямой ММ1, перпендикулярной к сечению Sи плоскости II движутся тождественно. Поэтому для изучения движения всего тела достаточно изучить как движется сечение в плоскости I.
Плоскопараллельное движение можно разложить на нейтральное и вращательное. Рассмотрим движение плоской фигуры в плоскости I.
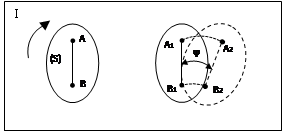 Предположим,
что плоская фигура S
Предположим,
что плоская фигура S
движется поступательно, тогда любая взятая
на этой фигуре будет оставаться
параллельной самой себе, но за тот же самый
промежуток времени плоскость повернется
вокруг какой то точки В на некоторый угол
α. Точка, вокруг которой плоская фигура поворачивается называется полюсом вращения. За полюс вращения может быть принята любая точка. Полюса вращения зависят от поступательного движения, и не зависят от вращательного.
Возьмем за полюс вращения точку А, тогда будем иметь
 |
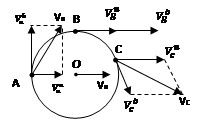
Скорость точек при плоскопараллельном движении
 Возьмем
колесо, которое катится без скольжения по
Возьмем
колесо, которое катится без скольжения по
неподвижной плоскости и найдем ее абсолютные
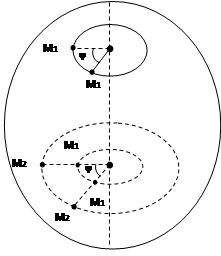
скорости. Примем за полной вращение точку О (ось
колеса). Ось колеса совершает поступательное движение и имеет скорость U0. Все остальные точки помимо поступательного совершают и вращательное движение вокруг полюса вращения. Например, точка. Скорость точки как и любой другой точки в поступательном движении будет одинакова и равна скорости U0, т.е. VA=VB=VC=…V0
Вращательная скорость зависит от радиуса вращения вокруг полюса. Абсолютная скорость точки А определяется по теореме Пифагора.
UA=![]() (VAп)2+(UAв)2
(VAп)2+(UAв)2
Скорости остальных точек, например В и С.
VA=Vп+VBв, т.к. векторы этих скоростей действуют по одной прямой и в одну сторону.
VC=![]() (VCп)2+(VCв)2+2VCпVCв
·cosα, т.к. векторы этих
скоростей направлены под произвольным углом друг к другу, т.е. если тело
совершает плоскопараллельное движение, то скорости различных точек этого тела
будут различны. Например, скорости гусениц танка, лежащих на земле равны 0, а
скорости гусениц, лежащих наверху будут максимальными. Привяжем ленту к колесу
велосипеда и будем наблюдать за ней. Если лента находится ближе к земле, то ее
скорость будет минимальна, если же она находится на самом большом расстоянии от
земли, то ее скорость будет максимальна.
(VCп)2+(VCв)2+2VCпVCв
·cosα, т.к. векторы этих
скоростей направлены под произвольным углом друг к другу, т.е. если тело
совершает плоскопараллельное движение, то скорости различных точек этого тела
будут различны. Например, скорости гусениц танка, лежащих на земле равны 0, а
скорости гусениц, лежащих наверху будут максимальными. Привяжем ленту к колесу
велосипеда и будем наблюдать за ней. Если лента находится ближе к земле, то ее
скорость будет минимальна, если же она находится на самом большом расстоянии от
земли, то ее скорость будет максимальна.
Тема: Способы определения положения мгновенного центра скоростей
1. Понятие о мгновенном центре скоростей
Если тело совершает плоскопараллельное движение, то оно обязательно имеет точку, чья скорость в каждый данный момент равна 0.
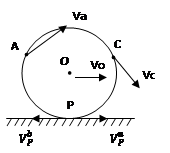 Возьмем
точку Р. Все точки этого тела совершат поступательное
Возьмем
точку Р. Все точки этого тела совершат поступательное
движение и имеют одну и ту же скорость.
Докажем, что абсолютная скорость точки Р=0. В поступательном движении скорость точки Р=0. Во вращательном движении точка
Р направлена по касательной к траектории движения и по напра-влению угловой скорости.
UabcP=Uпост р – Uвращ Р
Uвращ Р=Wp·Rно
WпР=![]() , отсюда Uвращ=Uпост,
Uабс=0
, отсюда Uвращ=Uпост,
Uабс=0
Точка, чья скорость в данный момент времени равна нулю называется мгновенным центром вращения. Имея мгновенный центр вращения мы можем рассматривать плоскопраллельное движение как вращательное движение вокруг мгновенного центра и тогда чтобы определить скорость какой либо точки С необходимо эту точку соединить с мгновенным центром скоростей точки Р.
VABC (·C)=Wp·PC – радиус вращения вокруг мгновенного центра.
WП – радиус вращения вокруг мгновенного центра скоростей
WП=![]()
2. Способы определения положения МЦС
Положение МЦС определяется в следующих случаях:
1. Колесо катится без скольжения по неподвижной плоскости. МЦС будет находится в точке касания колеса о неподвижную плоскость (F).
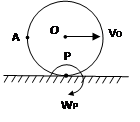
Wp=![]()
2. Известны линейные скорости двух любых точек тела VAи VB, МЦС будет лежать в точке пересечения перпендикуляров, проведенных из точек приложения векторов этих скоростей к самим векторам этих скоростей.

Wp=![]()
3. Известны векторы скоростей двух точек, которые перпендикулярны к прямой следующей точки приложения векторов этих скоростей, тогда МЦС будет лежать в точке пересечения этой прямой и прямой, соединяющей концы этих векторов.
 |
|||
 |
|||
Задачи
Колесо автомобиля R=0,4 м катится без скольжения по дороге. Ось колеса имеет U0=15м/сек. Определить скорость точек А, В и С под углом 60ͦ.
Решение:
Определяем положение МЦС. Она находится в точке касания.
Определяем WМЦС:
Wp=![]() Wp=
Wp=![]()
Определяем VA:
VA=Wp·AP
Ap=![]() R2+R2=R
R2+R2=R![]() =0,4·1,41=0,56
=0,4·1,41=0,56
VA=37,5·0,56 ![]()
VB=WP·PB=37,5·2R=37,5·0,8![]()
VC=WP·PC
PC=![]() 2+R2+2R2
cos60ͦ=
2+R2+2R2
cos60ͦ=![]()
VC=37,5·0,7=29,4м/с
Тема: Основные понятия и аксиомы динамики
Понятие динамики
Динамикой называется раздел теоретической механики, изучающий геометрические характеристики механического движения материальных точек и твердых тел с учетом причин, вызвавших данное движение. Иными словами, динамика устанавливает связь между силами и геометрическими характеристиками в частности с ускорением. В основе динамики лежит второй ее закон: F=m·a. К основным понятиям динамики относятся материальная точка и твердое тело. Твердое тело можно так же рассматривать как неизменяемую систему. В динамике рассматривают 2 основные задачи. Первая, когда по заданному закону движения необходимо определить силы, действующие на материальную точку или систему и вторая, образная задача, когда по заданным силам необходимо определить закон движения.
Основные законы динамики
Первый закон (принцип инерции). Этот вопрос рассматривался в введении. В динамике будем рассматривать систему отсчета, та по которой выполняется принцип инерции. Такая система называется инерциальной, а движение по отношению к этой системе абсолютным.
Второй закон (основной закон динамики).
Сила, действующая на материальную точку прямо пропорциональна массе материальной точки и ускорению.
F=m·a. Массой называют количество вещества, находящегося в материальной точке или теле.
Сила тяжести однородного тела пропорциональна его объему, а следовательно, и количеству вещества, содержащегося в нем.
Р=m·y, где у – ускорение свободного падения тела.
Р=Н=![]()
Третий закон (закон равенства действия и противодействия)
Сила, с которой одно тело действует на другое всегда равна по модулю и направлена по одной прямой в противоположные стороны.
Четвертый закон (закон независимости действия сил)
Ускорение, полученное телом от одной силы, равно сумме ускорений, полученных от системы сил, приложенных к материальной точке или твердому телу.
Дана система сил, приложенных к материальной точке. Найдем для этой системы равнодействующую.
 |
|||
 |
|||
R=F1+F2+F3
F1=m·a1, F2=m·a2, F3=m·a3 R=m·a
m·a=m·a1+m·a2+m·a3
a= a1+a2+a3+… т.е. получим четвертый закон динамики
Принципы Д'Аламбера
Возьмем основной закон динамики в скалярном выражении R=m·a, перенесем выражение, стоящее в правой части за знак равенства и получим R=m·a=0.
Выражение -m·aД, Аламбер назвал силой инерции и обозначил Fu= - m·a и получим равнение статики R+Fи=0, но R=F1+F2+F3+…F12 , тогда уравнение примет следующий вид F1+F2+F3+Fn…..Fu=0
Сформулировал свой закон он следующим образом: если к действующей системе сил прибавить фиктивную силу инерции, то данную систему сил можно рассматривать как систему, которая находится в равновесии. Фиктивный характер силы инерции заключается в том, что она приложен к материальной точке, а не к действующим силам.
Сила инерции равна Fu=m·a массе материальной точки и ускорению и направлена в сторону противоположную ускорению.
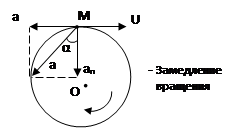
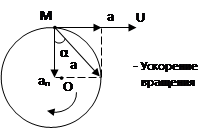
Тема: Сила инерции прямолинейном и криволинейном движениях
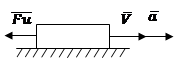
Сила инерции в прямолинейном движении
а) При ускоренном движении скорость и ускорение совпадают по направлению. Сила инерции направлена в сторону, противоположную ускорению (против движения)
 |
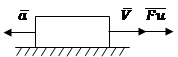
б) При замедленном движении скорость и ускорение имеют противоположное направление. Сила инерции направлена против движения.
 |
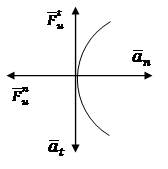
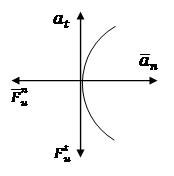
Сила инерции в криволинейном движении
В криволинейном движении два ускорения нормальное и касательное, следовательно имеем две силы инерции нормальное направленное в сторону противоположную нормальному ускорению и касательное, направленное в сторону противоположную касательному ускорению.
а) при ускоренном движении б) при замедленном движении
 |
Если тангенциальное ускорение равно 0, то имеем равномерное движение, а при равномерном движении тангенциальная сила инерции равна 0.
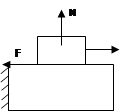
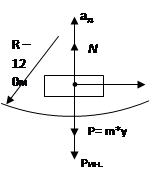
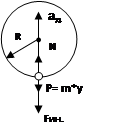
Задача
Масса мотоциклиста вместе с мотоциклом 280кг когда мотоциклист проезжает по мягкому мостику со скоростью 108 км/ч (30м/с), то мостик прогибается образуя дугу радиусом 120м. Определить максимальную силу давления, производимую мотоциклом на мостике.
Решение:
1.
 Определяем силы,
действующие на мостик: вес тела,
Определяем силы,
действующие на мостик: вес тела,
сила нормального давления N.
2. К действующим двум силам прибавляем силу инерции.
Рин=m·an,
где аn=![]() , тогда Рин=
, тогда Рин=![]()
3. Рассмотрим систему сил, находящуюся в равновесии, будем иметь:
N-my-Pин=0,
N=my+Pин=m(y+![]()
Сила нормального давления равна максимальной силе давления и направлена в противоположную сторону.
Задача
Какая максимальная сила прижимает летчика к креслу при выполнении фигуры высшего пилотажа «Петля Нестерова», если масса летчика 80кг, скорость самолета 150км/ч, радиус траектории 180м.
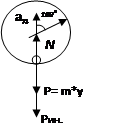 |
N=mg+Pин=m(g+![]() )
)
80=(9,8+![]()
Тема: Решение задач методами кинематики
Задача 1
К потолку вагона на тонкой нити подвешен груз, масса которого 1кг. Определить на какой угол α от вертикали отклонится нить при прямолинейном движении вагона с постоянным ускорением а=5м/с. Каково при этом натяжение нити. Массой нити пренебречь.
Решение:
1. 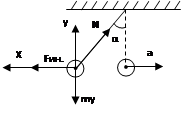 Выявляем
силы, действующие на груз это натяжение нити N
и вес груза Р=mg
Выявляем
силы, действующие на груз это натяжение нити N
и вес груза Р=mg
2. Для того, чтобы систему сил рассмотреть в равновесии, прибавляем силу инерции Fин= - m·a
3. Спроектируем силы на оси Х и У.
Ƹх=Fин-Nsinα=0
Ƹy=N·cosα-mg=0,
отсюда N=![]() Fин=
Fин=![]() ·sinα=0
·sinα=0
Fин-mg·tg·α=0,
tgα=![]() , α=27ͦ
, α=27ͦ
N=![]() =
=![]()
Задача 2
Шарик, масса которого 0,5кг привязан к нити длиной 60см и вращающийся вместе с ней в вертикальной плоскости с частотой 90об/мин. Определить наибольшее натяжение нити, пренебрегая его массой.
Решение:
N=mg+Fин
 Fин=m·an
Fин=m·an
an=![]()
an=![]() 2·R
2·R
W=![]()
W=![]()
an=9,422·0,6=53,24m/c2
N=0,5·9,8 +0,5·53,24=31,52H
Задача 3
К потолку вагона на тонкой нити подвешен шарик массой 2кг. При равноускоренном прямолинейном движении вагона нить отклоняется на угол α=15ͦ. определить ускорение вагона и натяжение нити. Массой нити пренебречь.
Решение:
 Ƹy=N·cosα-mg=0
Ƹy=N·cosα-mg=0
Ƹx=Fин - N·sinα=0
N=![]()
Fин=20,29·0,259=5,25Н
Fин=m·aотсюда
а=![]() 2
2
Задача 4
Груз в 5 тонн подвешен на тросе длиной 4 м, совершает колебательное движение и при переходе через положение равновесия имеет скорость V=1,6м/с. Определить натяжение троса в этот момент. Массой троса пренебречь.
Решение:
N=mg+Fин
Fин=m·an=m·![]()
N=m(g+![]()
Тема: Работа постоянной и переменной силы
Работа постоянной силы
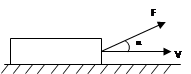
Если тело, к которому приложена сила перемещается, то такая сила совершает работу.
Работа постоянной силы равна произведению этой силы на перемещение ее точки приложения и на cosугла между силой и направлением движения.
А=F·S cos (FV)=F·S·cosα
 |
Частные случаи работы
а) α=0, cosα=1
А=F·S, т.е. направление силы, совпадает с направлением движения и работа будет положительной и максимальной.
б) α=90 ̊cosα=0
 |
В этом случае сила действует перпендикулярно направлению движения и такая сила работы не совершает А=0
в) α=180 ̊
![]()
А=-F·S
В этом случае сила действует в сторону, противоположную движению и такая сила совершает отрицательную работу. Силы, совершающие отрицательную работу называются силами сопротивления. Единица измерения работы 1Дон=H·m. Работа скалярная величина, которая характеризуется модулем и направлением движения.
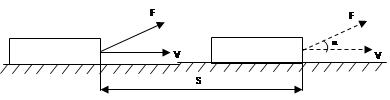
Работа переменной силы
Рассмотрим перемещение материальной точки на криволинейном участке пути под действием переменной силы из положения А в положение Bна элементарном перемещении dS.
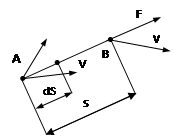 На
данном элементарном перемещении силу можно считать постоянной, а движение прямолинейным,
тогда элементарная работа будет равнаdA=F·dS·cos(
V), для того, чтобы получить полную
работу переменной силы, данное выражение проинтегрируем
На
данном элементарном перемещении силу можно считать постоянной, а движение прямолинейным,
тогда элементарная работа будет равнаdA=F·dS·cos(
V), для того, чтобы получить полную
работу переменной силы, данное выражение проинтегрируем
А=ʃF·ds·cos(FV)
Работа равнодействующей силы
 |
|||||
 |
|||||
 |
|||||
R=F1·cosα+F2+F3·cosα3
Умножим обе части равенства на приращение cosα·R·S=F1·cosα1·S+F2·S+F3·cosα3·S
AR=AF1+AF2+AF3, т.е. работа равнодействующей силы равна алгебраической сумме работ всех сил, приложенное к материальной точке или телу.
Работа равнодействующей через проекции на координатные оси
Проведем оси координат Х и У и спроектируем на
эти оси перемещение dsи на ось Х будет равна
ARx=ʃdARx=ʃRx·dx, aработа проекции силы на ось У
АRy=ʃdARy=ʃRydy
Общая работа будет равна алгебраической сумме
работ всех сил, приложенных к материальной
точке
АR=ʃRy·dy+ʃRxdx
Работа веса тела
Пусть тело под действием собственного веса перемещается из положения А в положение В. Определим работу веса на этом перемещении.
 Обозначим
высоту перемещения через Н.
Обозначим
высоту перемещения через Н.
Определим работу веса тела силы через
проекции на координатные оси.
АRy= Px·dx+ Ry·dy, по Рх=0
Ру=Р, тогда Ар= Р·dy=P·Y = P(Y2-Y1)=PH
Работа веса тела по какой бы траектории это
тело не перемещалось равна работе веса на
высоту перемещения центра тяжести этого тела.
Работа момента силы (пара сил)
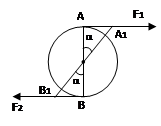
Пусть тело под действием пары сил (FF1) поворачивает тело
вокруг точки О и повернулось на некоторый угол α, тогда работа
силы F1 на перемещении дуги АА1 будет равна АF=F1·BB, по
BB= OB ·α
AF=F1·AO·α, AF=F·OB·α
Общая работа будет равна А=АF1+AF=F1·AO·α+F·OB·α=F·α(AO+OB)
Am=F·AB·α, поF·AB=M(F1F)
Am=M·α
Работа пары сил или момента силы равна произведению момента на угол поворота.
Задача
Тело массой 1000 кг скатывается по наклонной плоскости под действием собственного веса с высоты Н=3м, а затем движется по горизонтальной плоскости и останавливается пройдя путь S=2м.
Определить работу тела на всем участке пути, если F=0,5 (коэффициент трения), α=300
Решение:
1. Рассматриваем движение груза на наклонной плоскости и выявляем силы, приложенные к грузу.
2. На груз действуют три силы: сила трения Fтр=N·ʃ=mgʃ ·cos30ͦ, сила нормального давления N=P·cos30ͦ=mg·cos30ͦ и собственного веса Р=mg
Работа
веса тела: Ар=mgH;
работа силы трения АFтр=-mgʃcos
30ͦ·AB =-mgʃ·cos30ͦ·![]()
Общая работа на наклонной плоскости равна А=Ар+АFтр=mgH=mhʃ·H·ctg30ͦ=mg(H-Hʃ·ctg30ͦ)=1000 ·9,8 ·(3-3·0,5·1,732)=3939,6 Дж
Рассматриваем работу груза на горизонтальном участке пути. Сила Nи вес тела Р направлены перпендикулярно направлению движению, следовательно, работы не совершают. Работу совершает только сила трения.
АFтр==N·ʃ·BC=-m·y·ʃ·BC=-1000·9,8·0,5·2=-9800Дж.
Мощность и единица ее измерения
Мощность
есть первая производная от работы ко времени N=![]()
Мощность
от постоянной силы равна N=![]()
Мощность
от вращательного момента N=![]()
Различают затраченную работу, полезную работу и работу вредных сил сопротивления.
Полезная работа будет равна АЗ=Аn·c+Aвс
Аз=Авс=А·n·c. Разделим обе части равенства на затраченную работу
1-![]()
КПД - µ
µ=![]()
КПД равен работе полезных сил сопротивления деленной на затраченную работу.
Задача 1
Для того, чтобы поднять 5000 м3 воды на высоту 3м поставлен насос мощностью N=1,47 кВт, затраченная мощность, т.к. эта мощность идет на преодоление полезных и вредных сил сопротивления. Сколько времени потребуется для выполнения этой работы , если КПД µ=0,8
Решение:
1. Определяем полезную работу
Апс=m·g·hмасса m=5000м3=5·106кг
Апс=5·106·9,8·3=147·106Дж
2. С другой стороны
Апс=N·µ·t
3. Определяем время подъема воды
T=![]() =
=![]()
Задача 2
Как велика мощность машины, поднимающей 84р в мин молот массы m=200кг на высоту 0,75 м, если µ=0,7
Решение:
1. Определяем работу полезных сил сопротивления Апс=m·g·h·84=200·9,8·0,75·84=123480 Дж
2.
Определяем
мощность полезных сил сопротивления Nпс=![]()
t=60 сек, т.к. молот поднимается 84р/мин, то t=1мин
3. Определяем затраченную мощность
Nз=![]()
Задача 3
Найти мощность ДВС, если среднее давление на поршень в течение всего хода равно 49Н/см3, длина хода поршня 40см, площадь поршня 300см2, число рабочих ходов – 120 в мин, µ=0,9
Решение:
1. Определяем силу, действующую на поршень F=49·300=14700H
2. Определяем затраченную работу поршня
Аз=F·l·n=14700·0,4 ·120=705600Дж
3. Определяем затраченную мощность
Nз=![]()
4. Определяем полезную мощность двигателя
Nпс=Nз·µ=11,76·0,9=10,584кВт
Задача 4
Шлифовальный круг 0,6 м делает 120 об/мин. Потребляемая мощность N=1,2кВт. Коэффициент трения шлифовального круга о деталь 0,2. С какой силой круг прижимает шлифовальную деталь.
Решение:
1.
![]() Определяем
силу трения
Определяем
силу трения
Fтр=F·ʃ
2. Определяем момент силы трения
Мтр=Fтр·![]()
3. Определяем затраченный вращательный момент
Mвр=![]()
![]()
Тема: Теорема об изменении кинетической энергии. Закон сохранения энергии
Импульс силы и количество движения
Возьмем
второй закон Ньютона F=m·aи
умножим обе части равенства на время t,
будем иметь F·t=m·a·t,
подставим вместо а его значение а=![]() ·t
·t
F·t=mV-mV0
Выражение F·t, стоящее в левой части называется импульсом силы а=F·t. Импульс силы векторная величина. Вектор импульса силы направлен в ту же сторону куда и сила. Через проекции на координатные оси qx=Fx·t, qy=Fy·t, qz=Fz·t
Выражение, стоящее в правой части называется количеством движения p=mV-mV0. Количество движения есть векторная величина. Вектор количества движения направлен туда же куда и вектор скорости. Через проекции на координатные оси вектор количества движения будет равен рх=mVx, py=mVy, pz=mV-mV0
Задача
Автомобиль массой 3000кг имел начальную скорость 108км/ч-30м/с резко затормозил и чрез 5 сек остановился. Определить силу торможения автомобиля.
Решение:
1. Применим теорему об изменении количества движения
F·t= Mv-Mv0
F=![]()
Теорема об изменении кинетической энергии
Изменение кинетической энергии равно работе всех внешних сил. Возьмем второй закон Ньютона и умножим обе части равенства на S.
R=ma, RS=m-a·S. Выражение, стоящее в левой части есть работа всех внешних сил (F1+F2+….Fn)·S=F1S+F2S+….FnS=A1+A2+…..An=ƹAi
Выражение, стоящее в правой части есть изменение кинетической энергии.
Е=m·a·S;
а=![]()
F=m![]() =
=![]()
F=![]()
Если начальная скорость равна О, т.е. U0=0, то будем иметь кинетическую энергию в прямолинейном движении, т.е. кинетическая энергия в прямолинейном движении равна половине произведения массы материальной точки на квадрат ее скорости.
Е=![]()
Кинетическая
энергия в криволинейном движении U=W·R,
подставим вместо U его значение в
криволинейном движении и будем иметь Е=![]() Mr2–называется
моментом инерции, тогда кинетическая энергий в криволинейном движении прямо
пропорциональна половине произведения момента инерции на квадрат его угловой
скорости , т.е. Е=
Mr2–называется
моментом инерции, тогда кинетическая энергий в криволинейном движении прямо
пропорциональна половине произведения момента инерции на квадрат его угловой
скорости , т.е. Е=![]()
Задача
Тело скатывается под действием собственного веса по наклонной плоскости из состояния покоя. Высота наклонной плоскости 10м, угол наклона 30ͦ, масса тела 3000кг. определить скорость, которую будет иметь тело в конце спуска.
Решение:
![]() 1.
Выявляем силы, действующие на тело: вес тела Р=m·g,сила
нормального давления Nuсила
трения Fтр=N·ʃ
1.
Выявляем силы, действующие на тело: вес тела Р=m·g,сила
нормального давления Nuсила
трения Fтр=N·ʃ![]() .
.
Разложим вес тела на две составляющие, т.е. спроектируемего на нормаль и на направление силы трения и будем иметьN=m·g·cos30ͦ, P=m·g·cos60ͦ Fтр=m·g·t·cos30ͦ.
Работу совершает Fтр и Р.
2. Применим теорему об изменении кинетической энергии
![]() -
-![]() тр)·АВ где АВ=
тр)·АВ где АВ=![]()
Начальная
скорость равна 0, будем иметь ![]() -
-![]() м/с=47,4км/ч
м/с=47,4км/ч
Тема: Основное уравнение динамики поступательного и вращательного движения твердого тела
Основное уравнение динамики для вращательного движения твердого тела
Тело вращается ускоренно под действием сил F1; F2…..Fn
![]() авим
к действующей системе сил силы инерции
авим
к действующей системе сил силы инерции
Fин=m·an; Fин=m·aи составим уравнение моментов относительно оси вращения.
ƸМy=F1·R1+F2·R2+….Fn·Rn-Rин·R=0
ƹMi=Fин·R=m·a·R, но а=eR, тогда ∑mi=YE, отсюда
Е=![]() угловое ускорение прямо
пропорционально моменту
угловое ускорение прямо
пропорционально моменту
внешних сил и обратно пропорционально моменту инерции.
Момент инерции простых геометрических тел
![]()
инерции геометрических тел оси, расположенной на
конце
однородного тонкого стержня равен У=![]()
оси, проходящей через его середину
![]()
У=![]()
![]() Момент
инерции однородного сплошного круглого цилиндра относительно оси его вращения
Момент
инерции однородного сплошного круглого цилиндра относительно оси его вращения
Уц=![]()
![]() Момент
инерции однородного полого круглого цилиндра относительно оси вращения (кольцо)
Момент
инерции однородного полого круглого цилиндра относительно оси вращения (кольцо)
Ук=mR2
Тема: Применение общих теорем динамики к решению задач
Задача 1
Автомобиль массой 900кг, имел скорость 108км/ч 30м/с, резко затормозил. Определить тормозной путь автомобиля, если ʃ=0,6 и время торможения.
Решение:
![]() тр·S=-N·ʃ·S=-mgʃ·S
тр·S=-N·ʃ·S=-mgʃ·S
![]() mgʃ·S отсюдаS=
mgʃ·S отсюдаS=![]()
Определяем
время торможения -F·t=-mV0,
mgS·t=mV0,
t=![]()
Задача 2
Автомобиль массой 800 кг, имел скорость 72км/ч или 20м/с, резко затормозил. Определить коэффициент трения шин о землю, если тормозной путь S=50м и время торможения.
Решение:![]()
Определяем время торможения
-m·g·ʃ·t=-mV0,
T=![]()
Задача 3
Автомобиль массой 800 кг резко затормозил. Определить при какой скорости движется автомобиль, если ʃ=0,75, S=40м и время торможения.
Решение:
V02=2gt·S,
V=![]()
Определяем время торможения
T=![]()
Задача 4
Упавший на землю метеорит массой 39 кг, углубился в почву на 1,875м. Вычисленно, что почва в месте падения метеорита оказывает, проникающему в нее телу сопротивление 5·105Н. С какой скоростью метеорит достиг поверхности земли. С какой высоты он должен упасть без начальной скорости, чтобы у поверхности земли приобрести указанную скорость. Считаем силу тяжести постоянной и пренебрегаем сопротивлением воздуха.
![]() Решение:
Решение:
1)
![]()
![]() 5·105·1,875
5·105·1,875
![]() 2=
2=![]() 3
3
![]() 2=220м/с
2=220м/с
2)
![]()
![]() 2=2Gh,
H=
2=2Gh,
H=![]()
Задача 5
Ротор массой 40кг находится под действием постоянного момента m=100H·m, ему препятствует момент силы трения М=5H·m. Ротор считать сплошным диском радиуса R=0,3м. определить угловое ускорение и угловую скорость в конце 5сек после начала движения, а также линейные скорости и ускорения точек, расположенных на поверхности ротора.
Решение:
1. Записываем основное уравнение динамики вращательного движения твердого тела
У·Е=ƹМi
2. Определим момент инерции ротора
У=mR2=40·0,32=3,6кг/м2
3. Определяем угловое ускорение ротора
Е=![]() 2
2
4. Определяем угловую скорость ротора
W=E·t=26,4·5=132м/с
5. Определим скорость точек, расположенных на поверхности ротора
U=W·R=132·0,3=39,6м/с
6. Определяем а
а= Е·R=26,4·0,3=7,92м/с2
7. Определяем а
а = ![]() 2
2
8. Определяем полное ускорение точек
а = ![]() n=
n=![]() 2+5227,22=5227,3м/с2
2+5227,22=5227,3м/с2
Урок №1 1 Основные понятия статики
Если какая-нибудь система сил обладает таким свойством, что после приложения к свободному телу она не изменит его механического состояния, то такая система называется уравновешенной
Откуда найдем направление равнодействующей sinα = 1
Отношения сторон любого треугольника к синусам противоположных углов есть величина постоянная
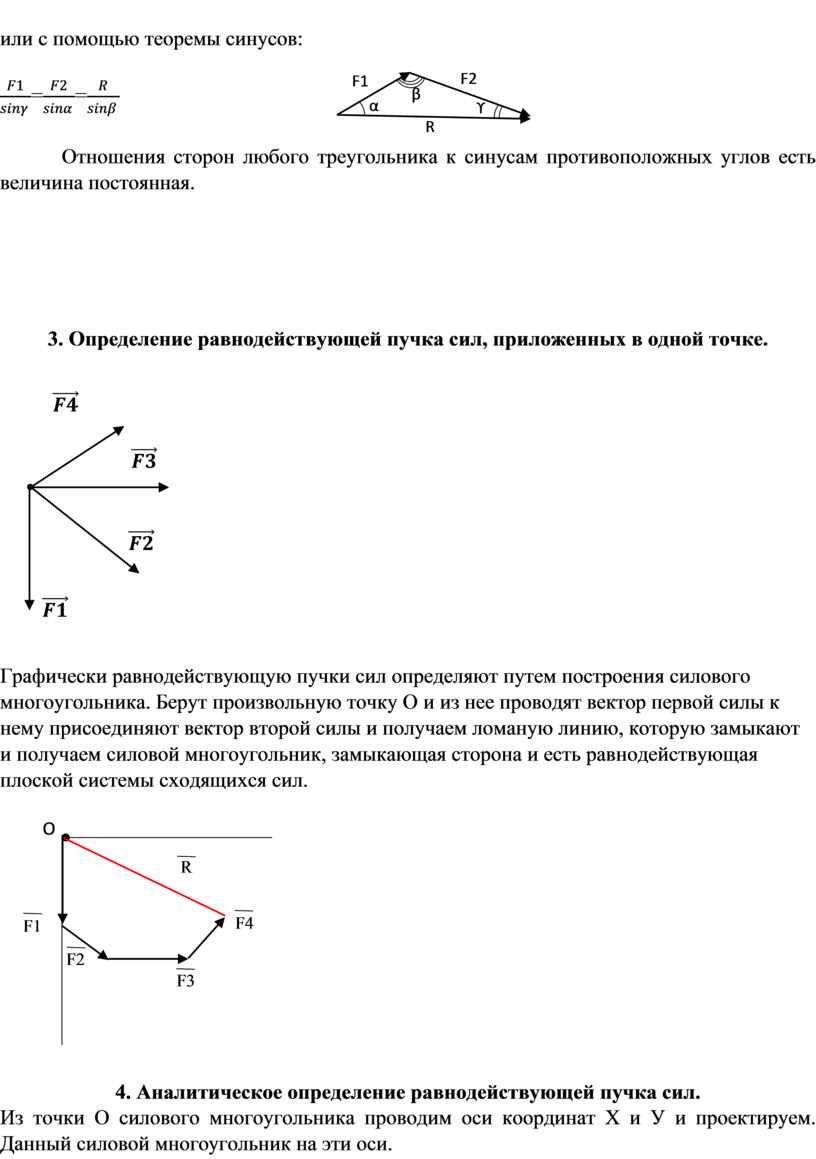
R y =F1 y +F2 y +F3 y =F ∑ y R= x 2 +R y 2 = 2 +( ) 2 5
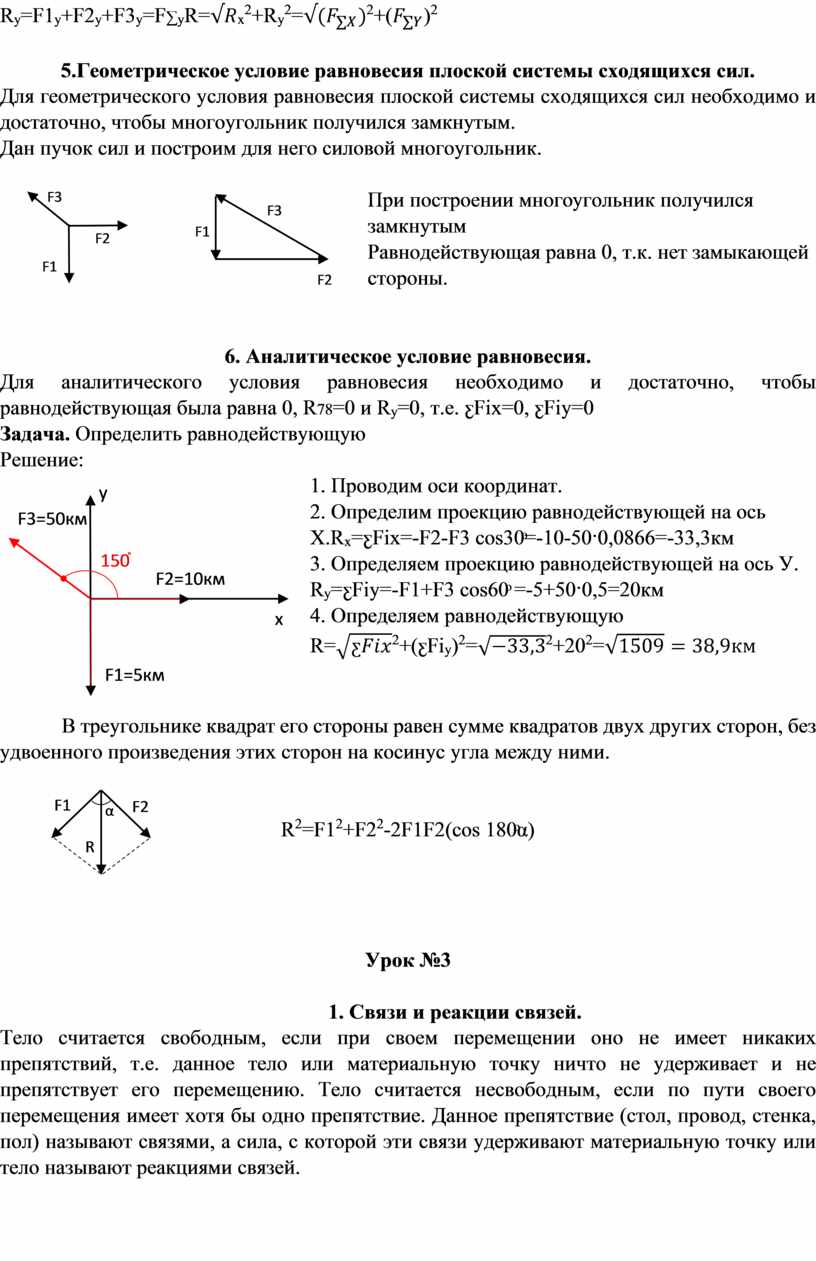
Правило определения реакций идеальных связей
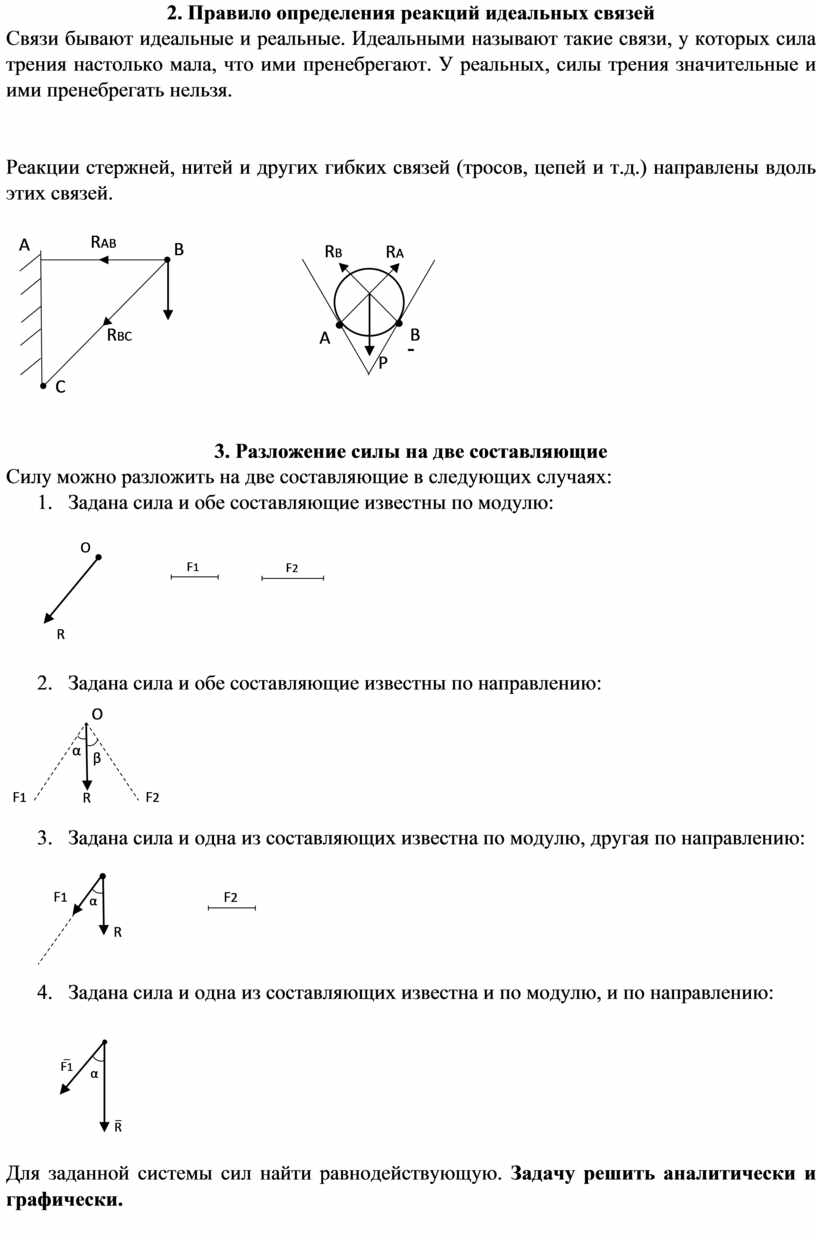
Аналитическое решение: 1.
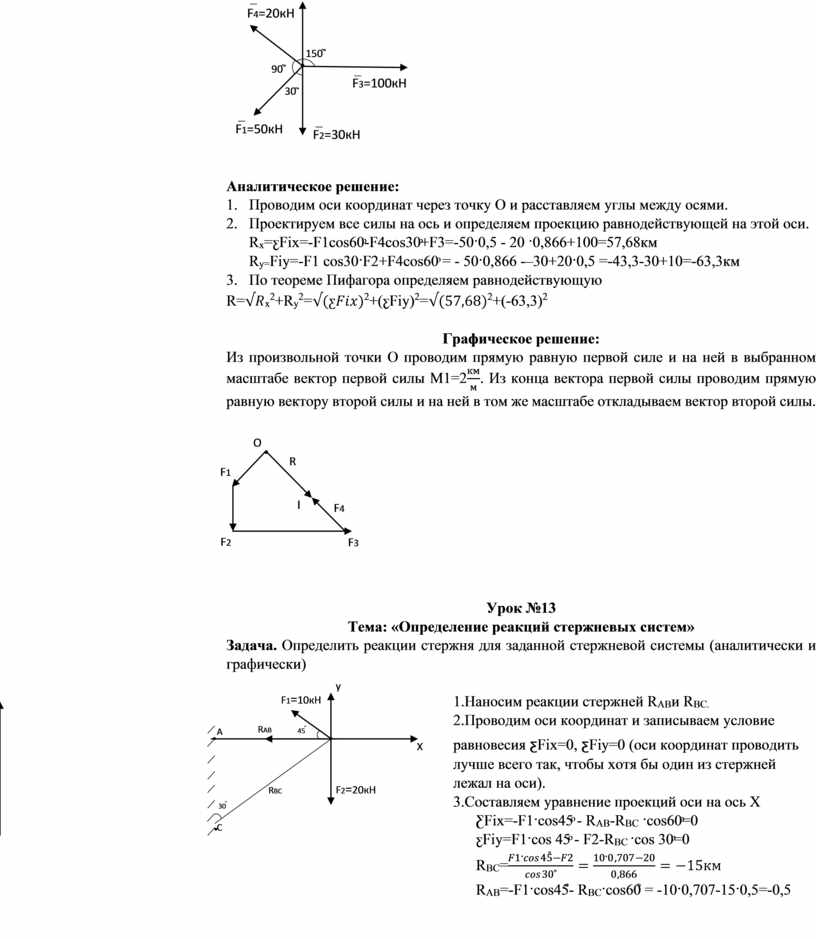
Графическое решение Из произвольной точки
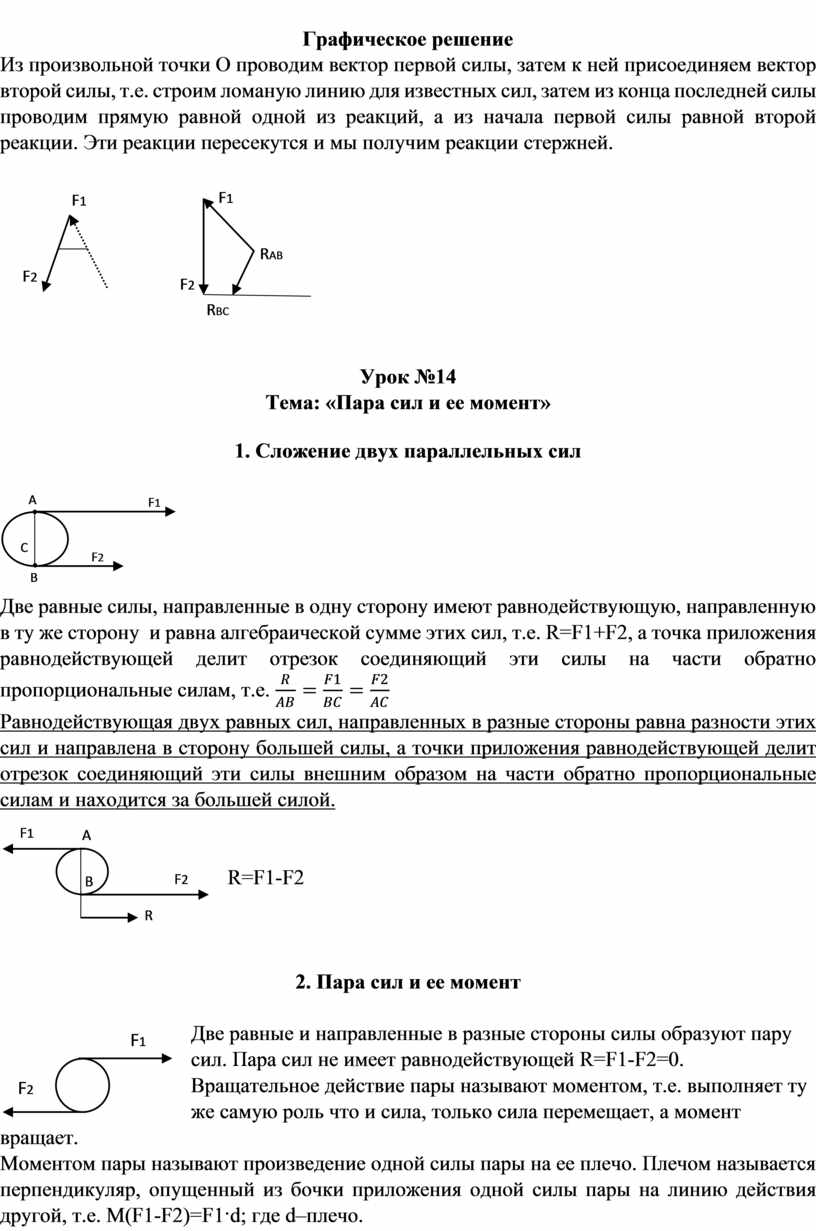
Единица измерения момента М-метр
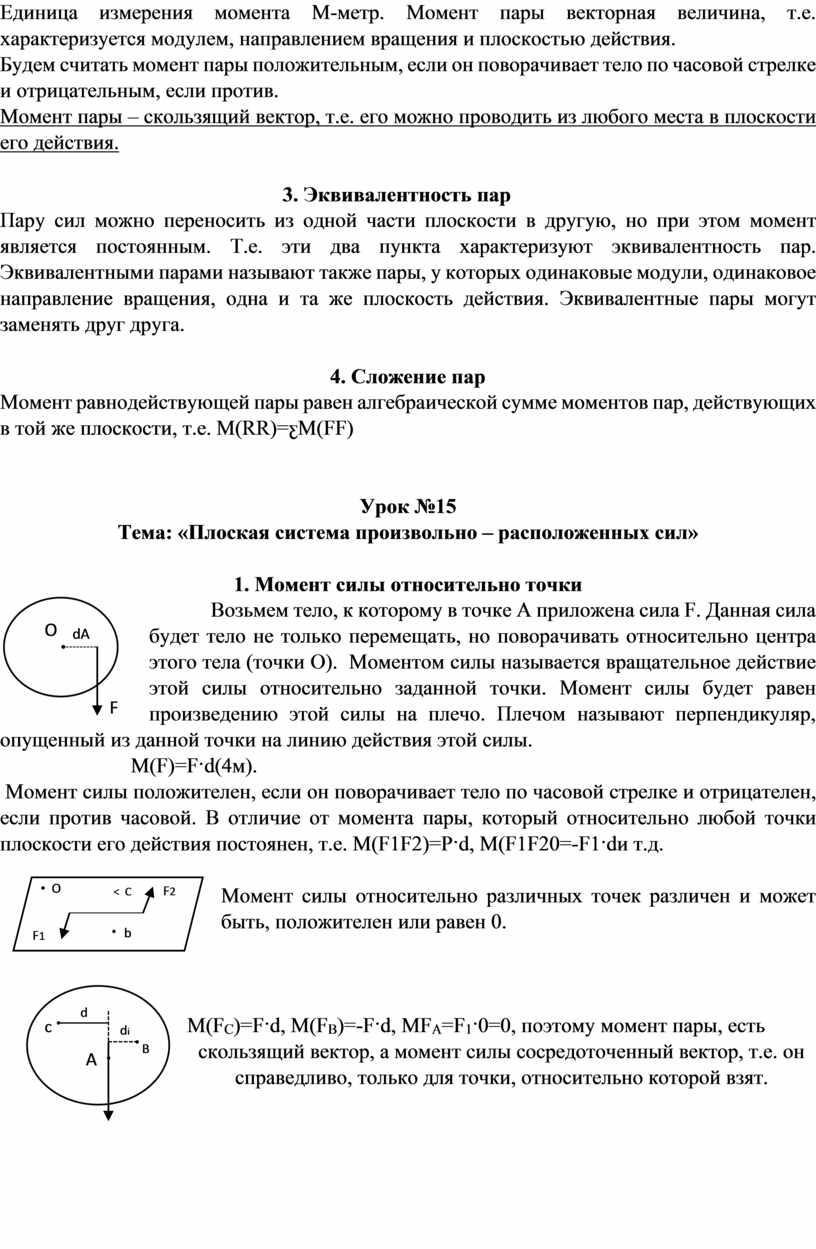
Приведение силы в заданную точку
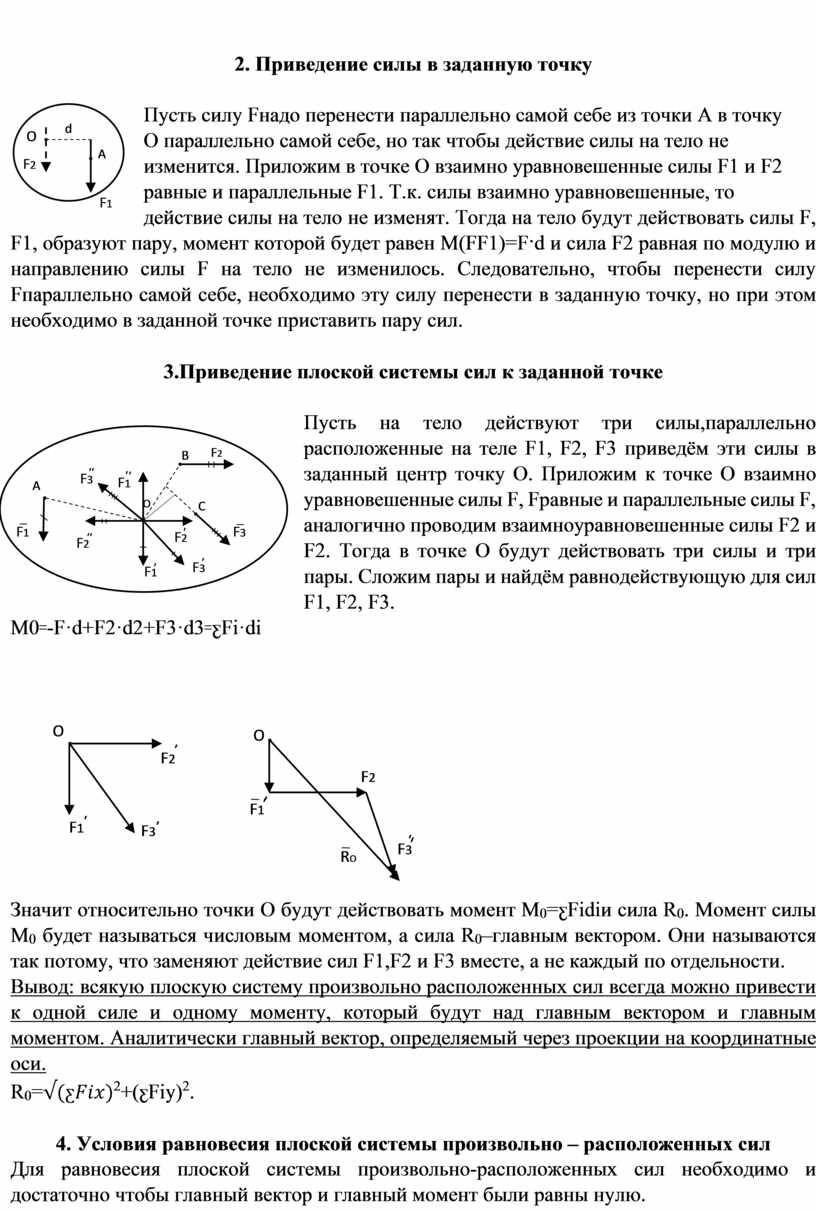
М 0 =ƹМ=ƹМ=0 и R 0 = 2 +(ƹ Fiy ) 2 =0
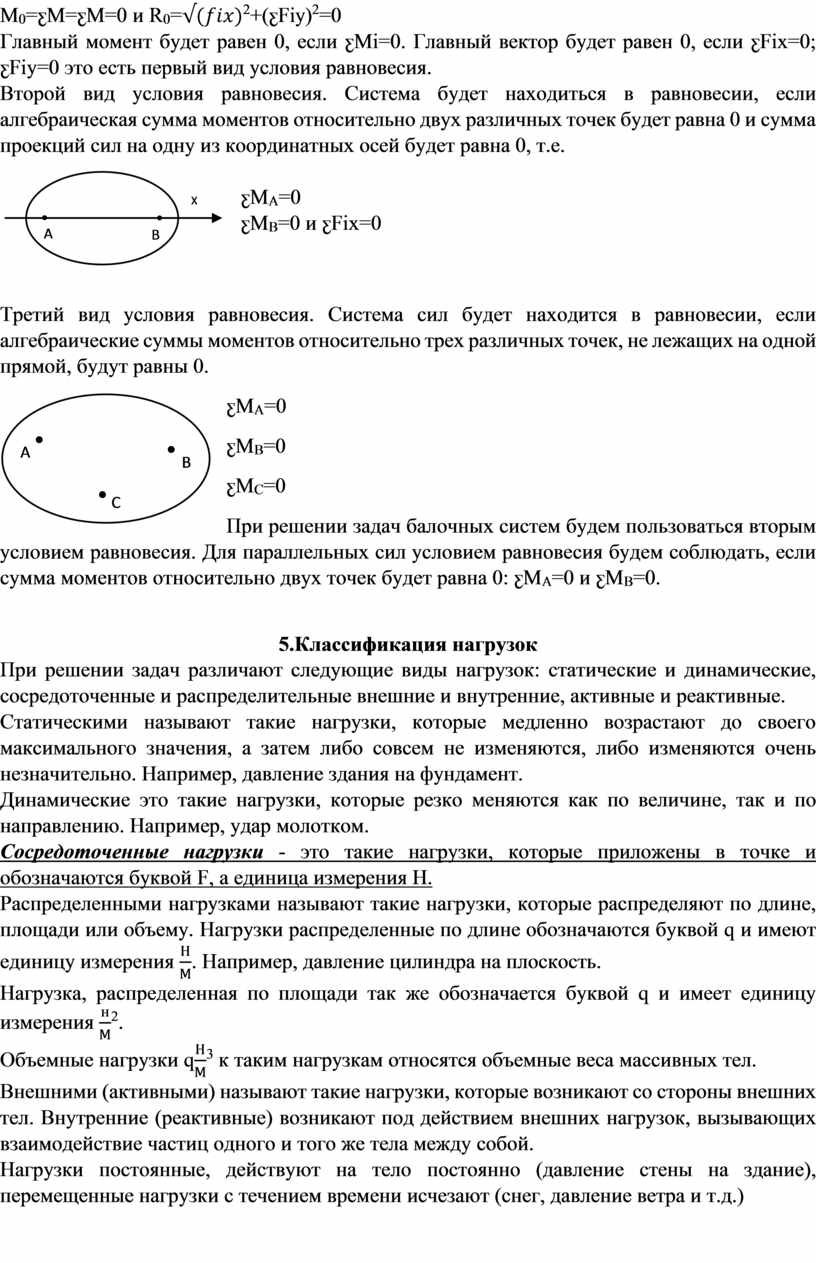
Опоры балочных систем В балочных системах различают следующие виды опор: шарнирно-подвижная, шарнирно-неподвижная и опора жесткая заделка или закрепление
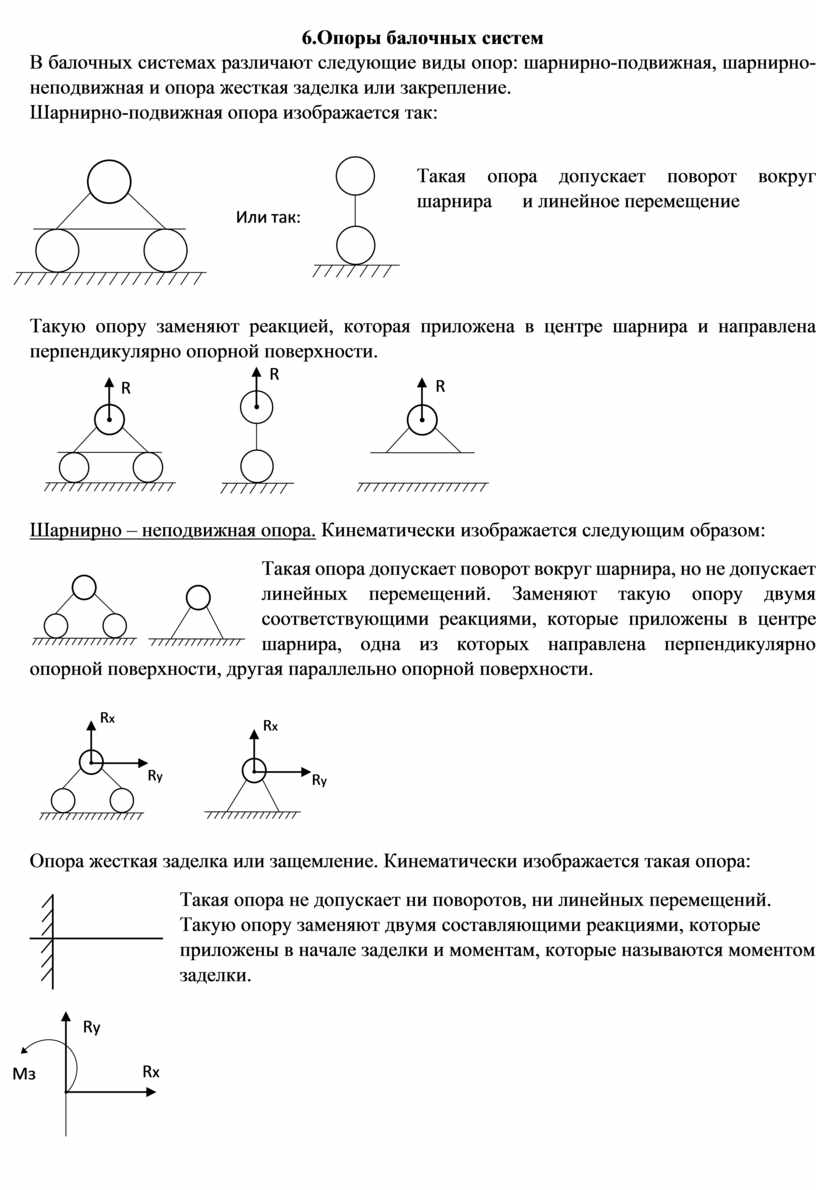
Определение реакций опор балочных систем
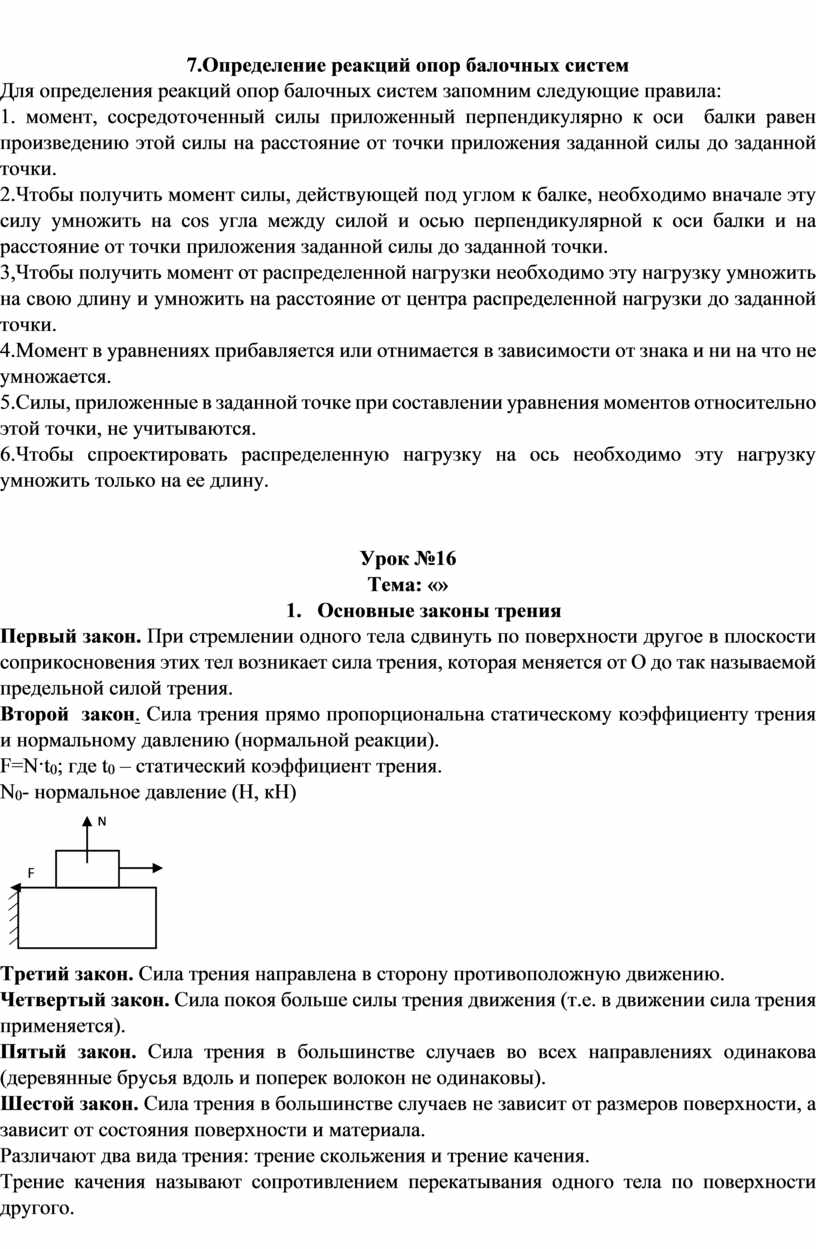
Угол и конус трения Связи, в которых возникают силы трения называются реальными связями
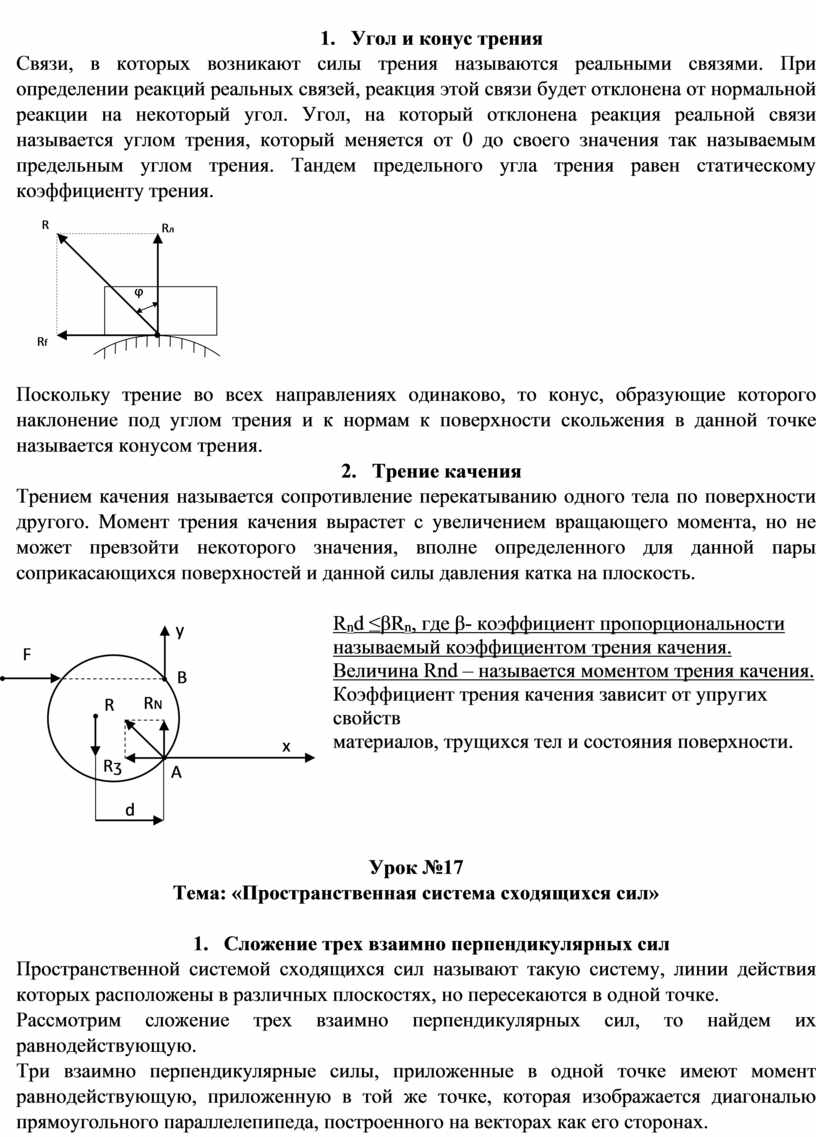
R 2 = F 1 2 + F 2 2 + F 3 2
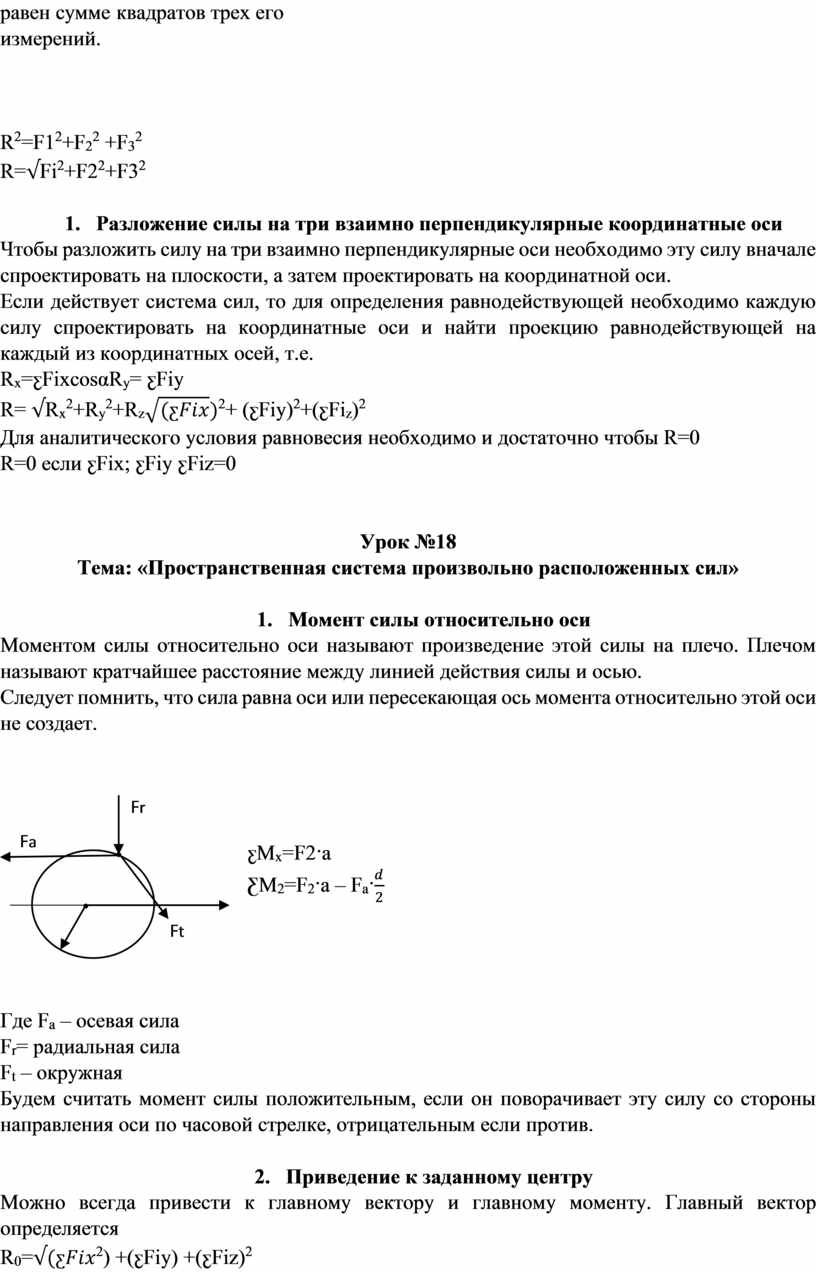
Главный момент М 0 = 2 +(ƹ
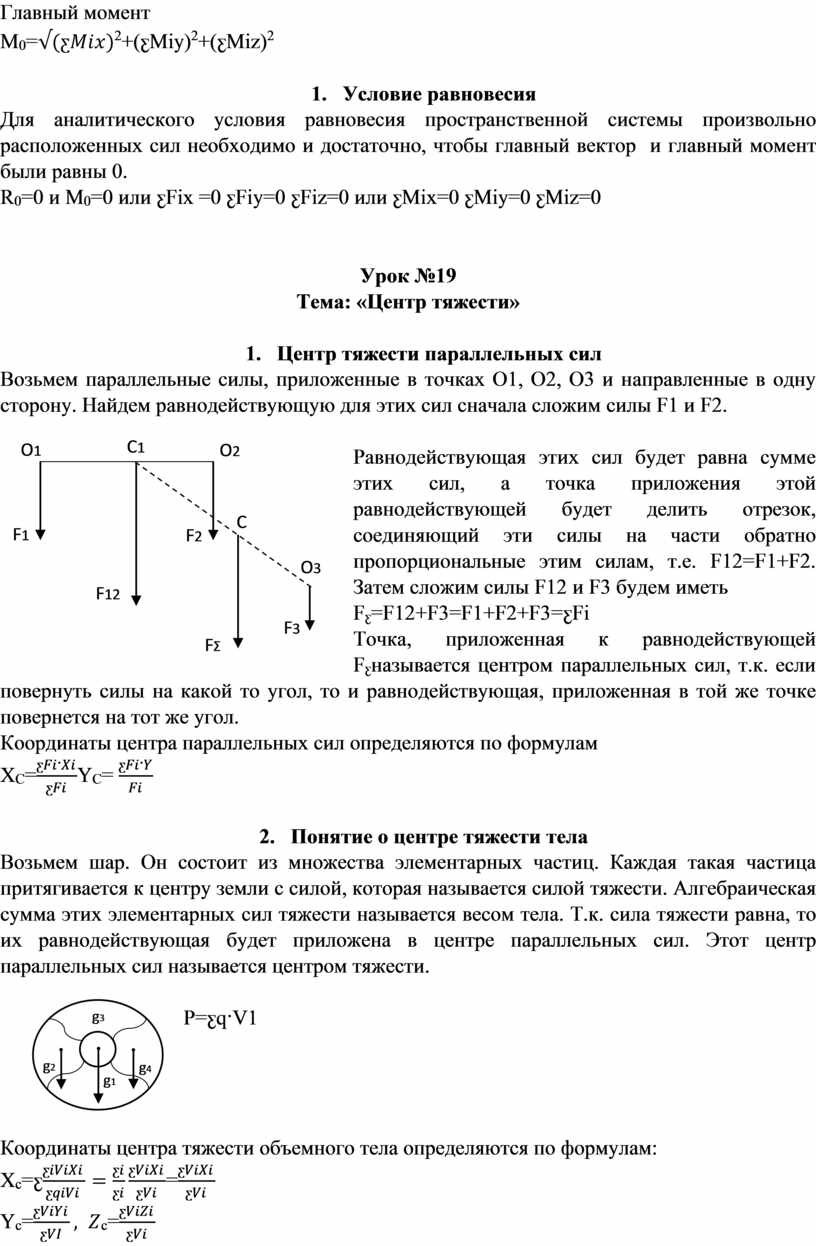
Если тело имеет форму тонкой пластины, то ее вес можно выразить через площадь
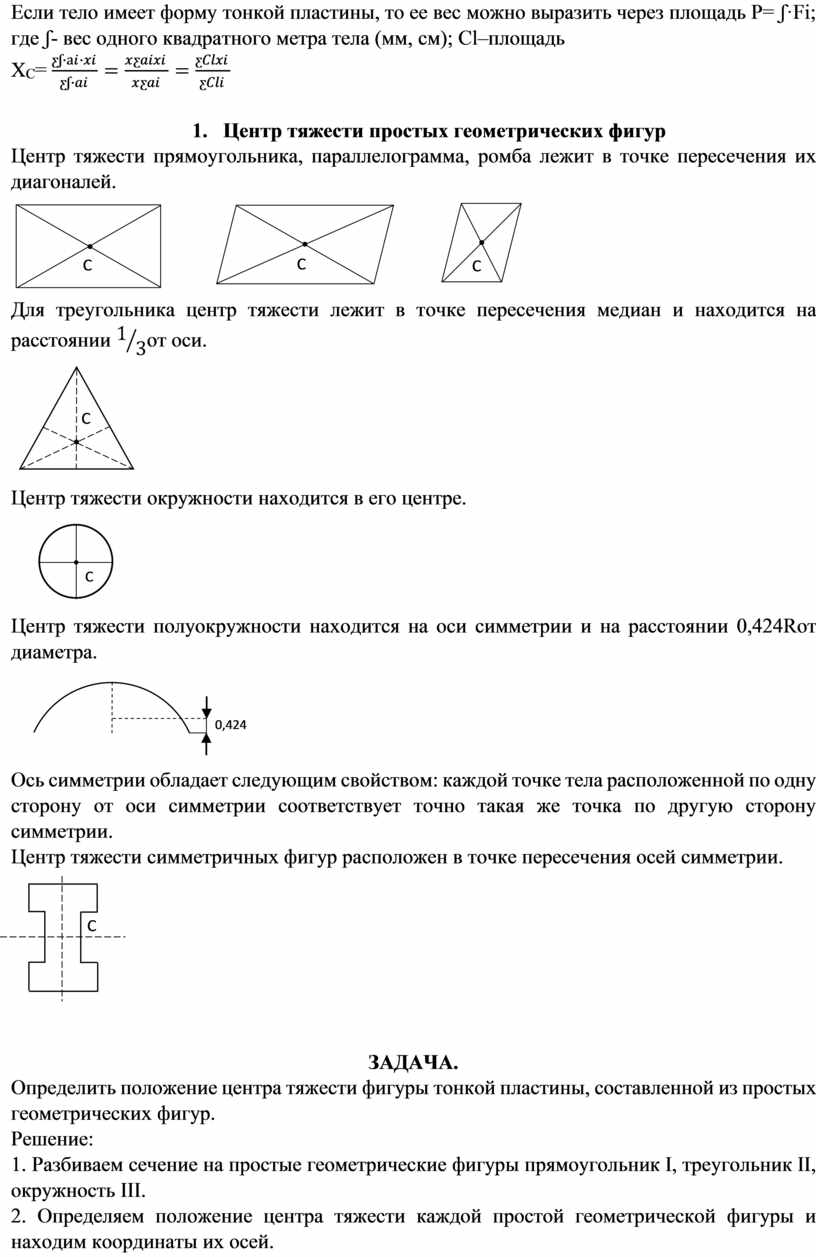
Определяем площади каждой простой геометрической фигуры
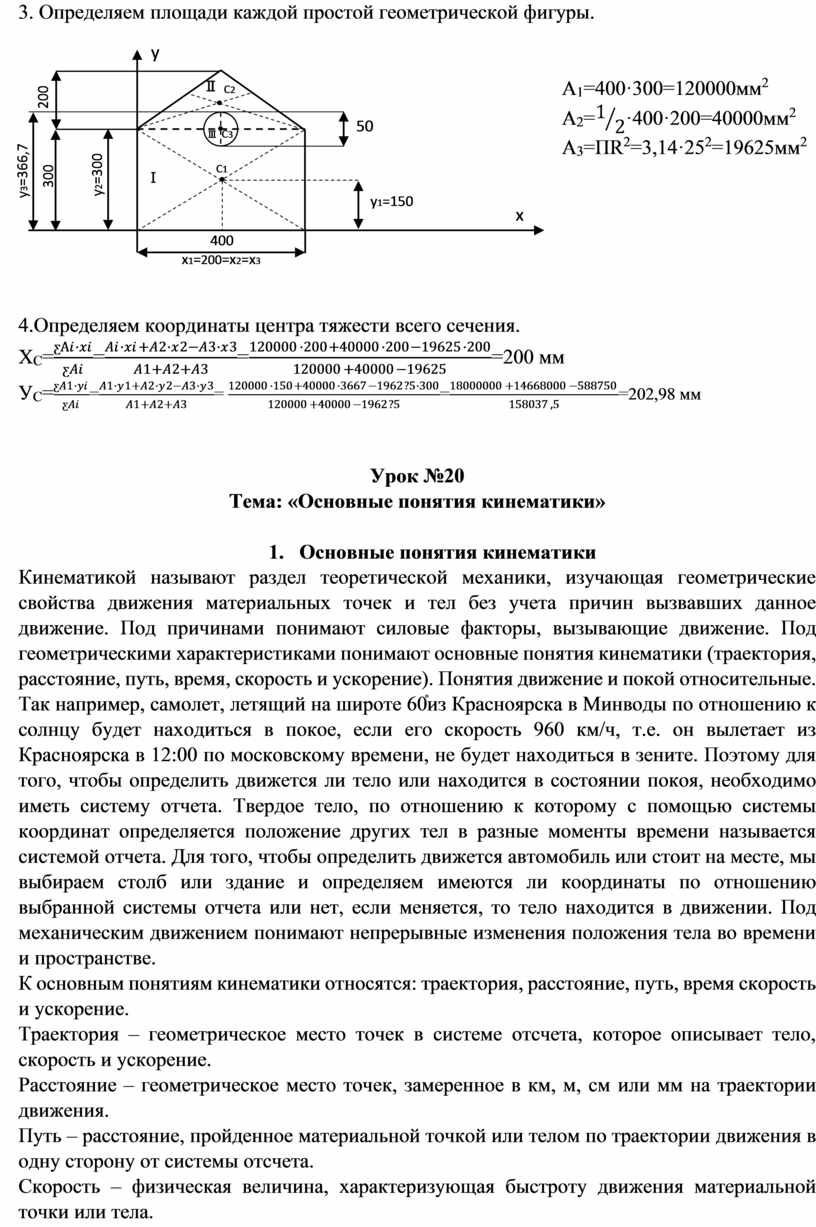
Ускорение – физическая величина, характеризующая величину изменения скорости в единицу времени
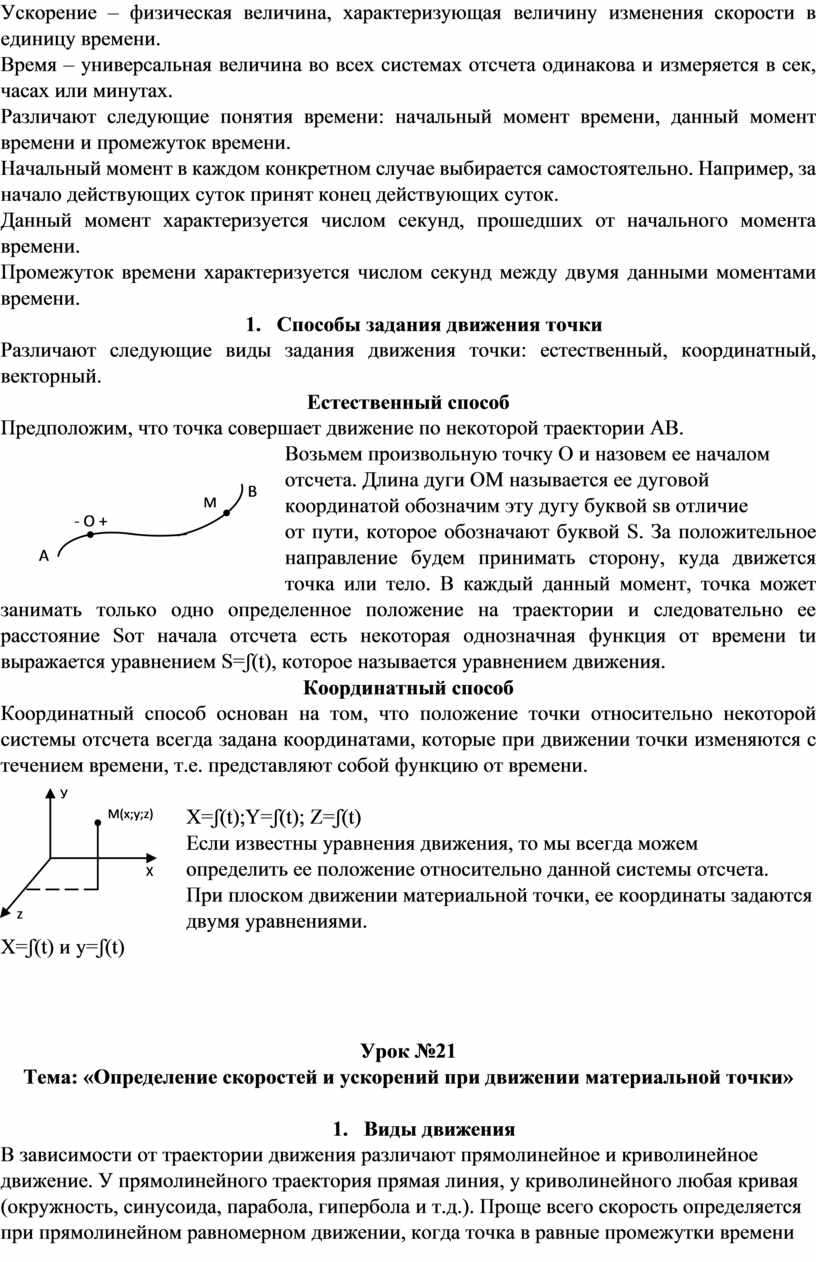
Скорость будет определяться отношением пути ко времени
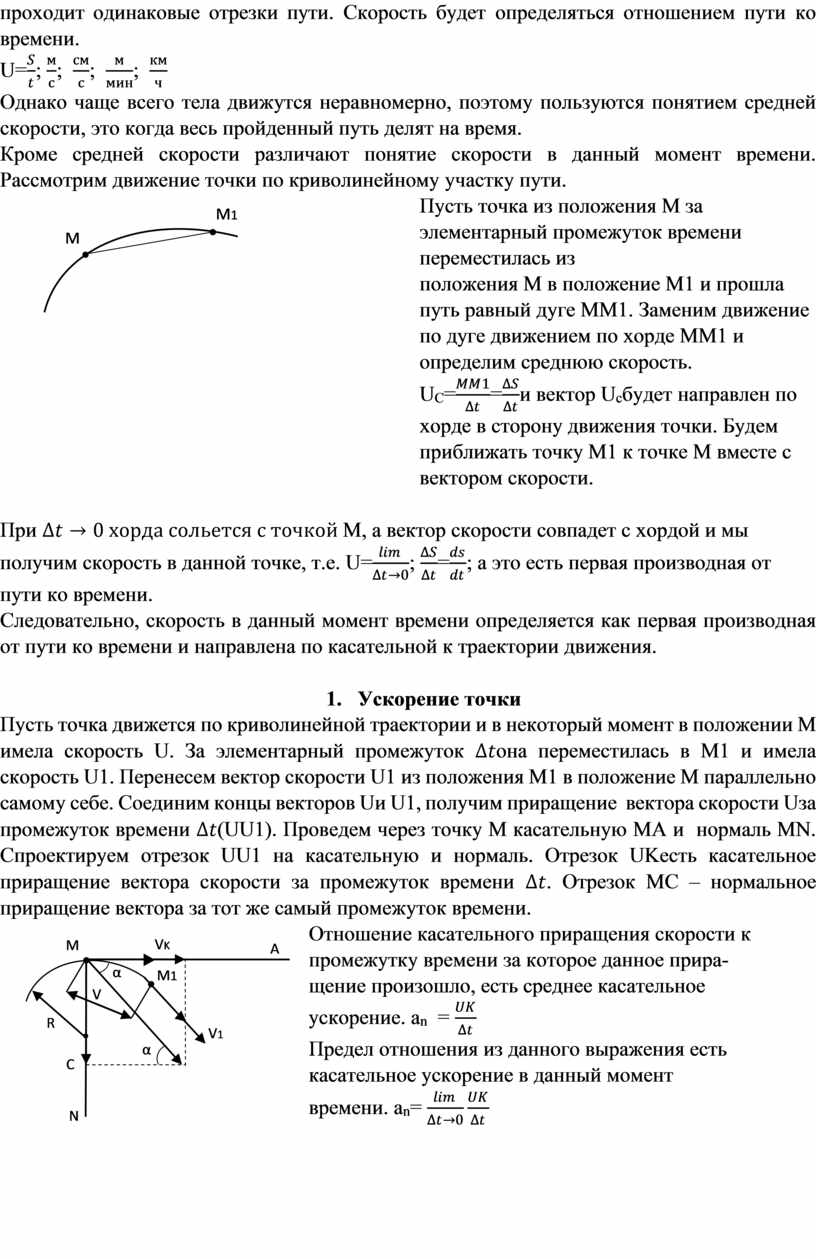
Касательное ускорение направлено на изменение величины скорости
Человек движется равномерно и за 30 мин проходит путь равный 2,5 км
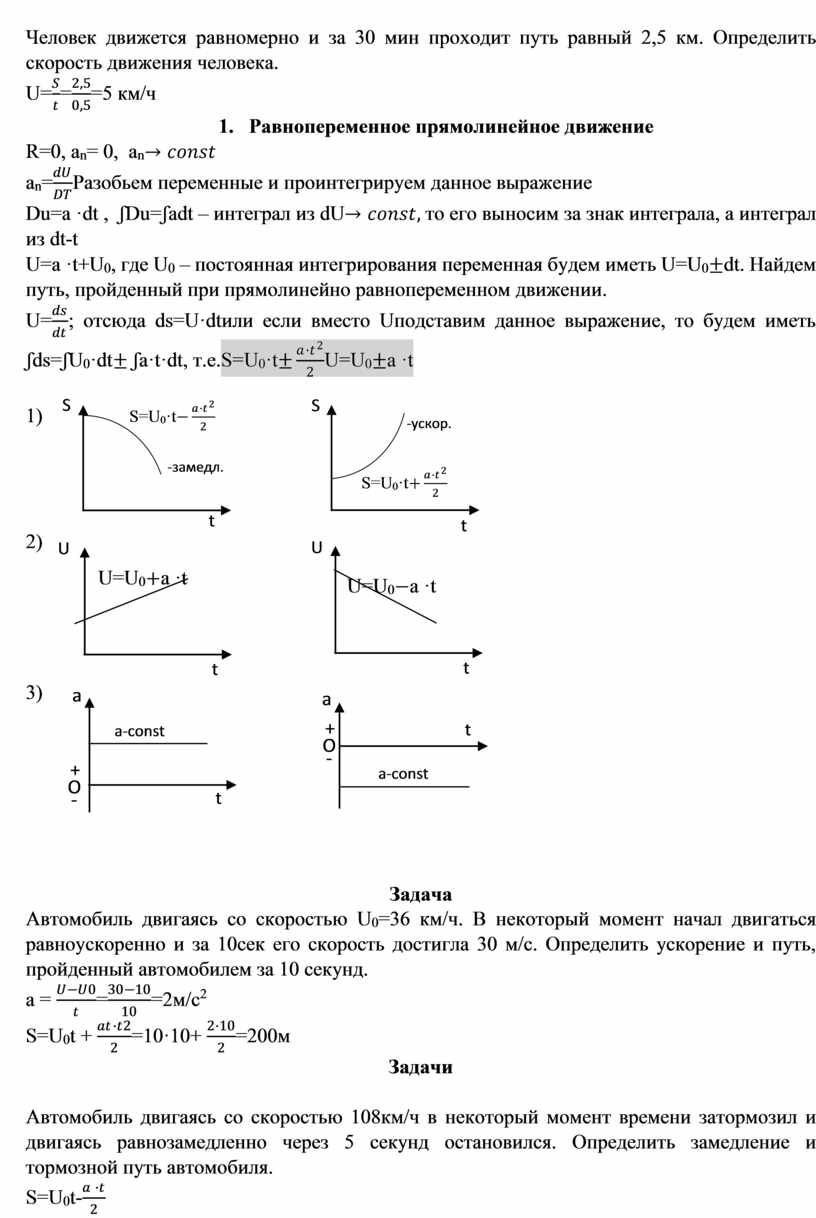
U=U 0 -a ·t a = = 2 S = 30 ·5 - =150-75=75 м 1
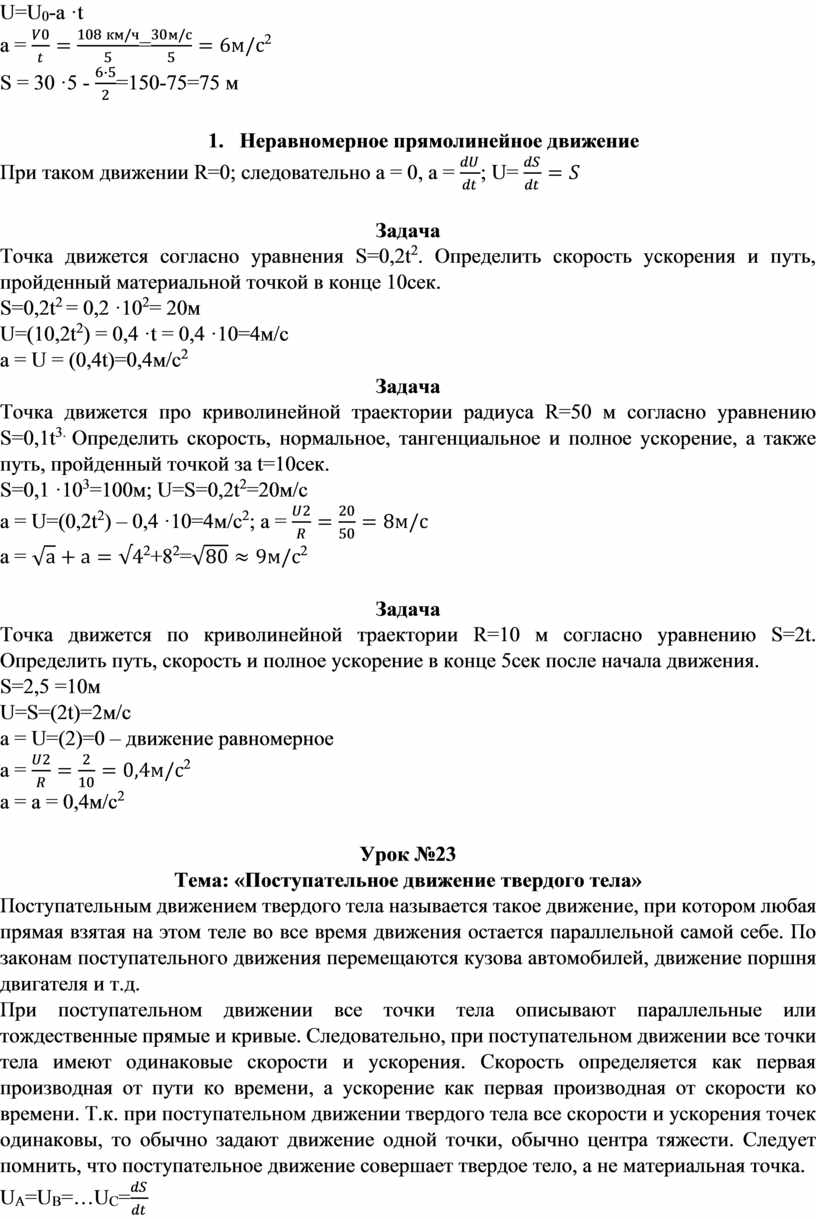
B =…a C = Урок №24
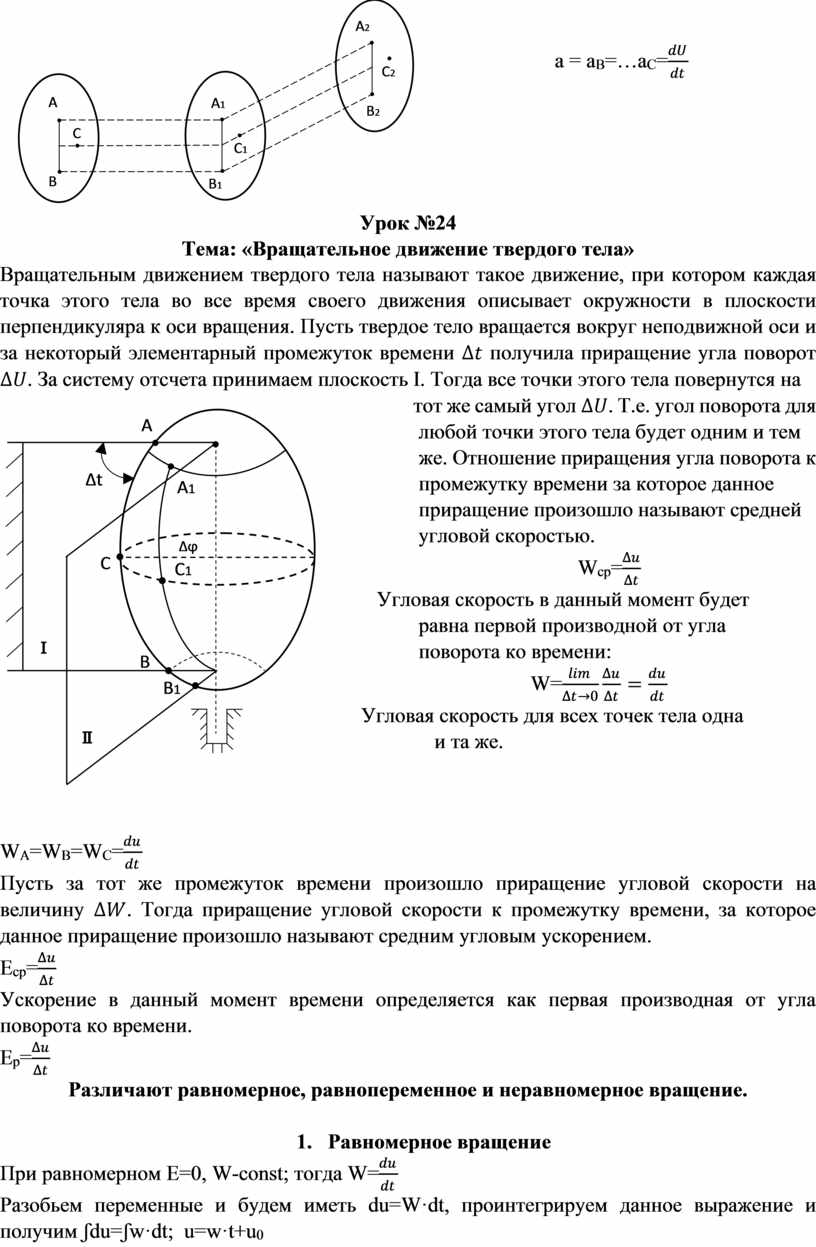
Если тело вращается из состояния покоя, то u 0 =0, тогда w =
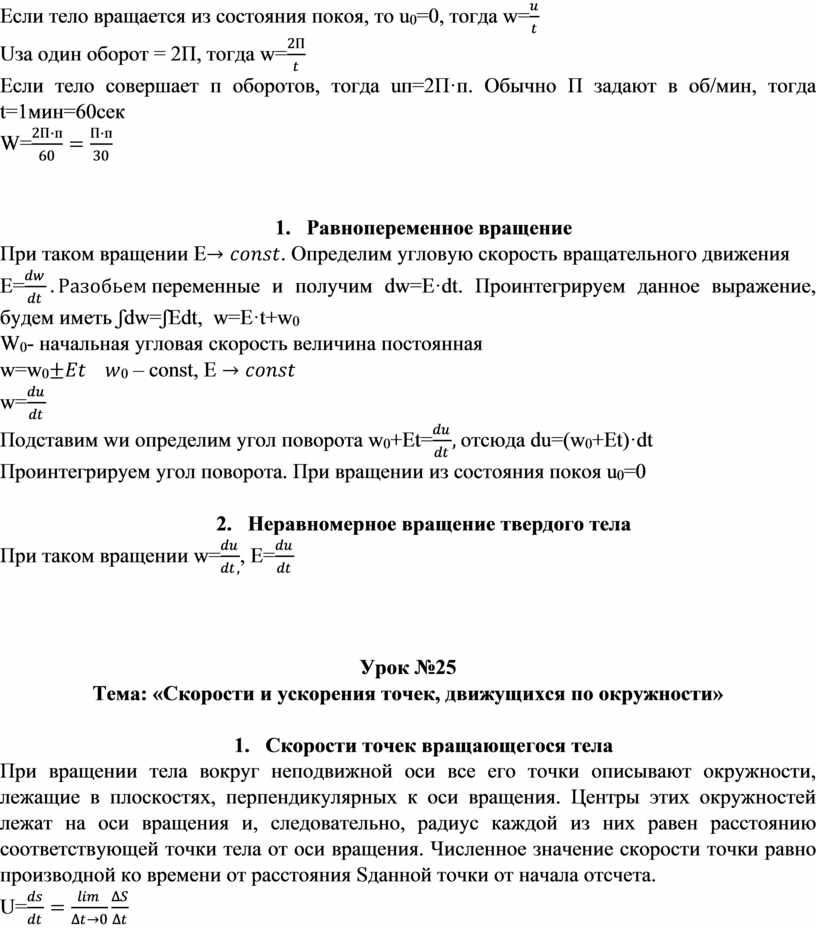
Ускорение точек вращающегося тела
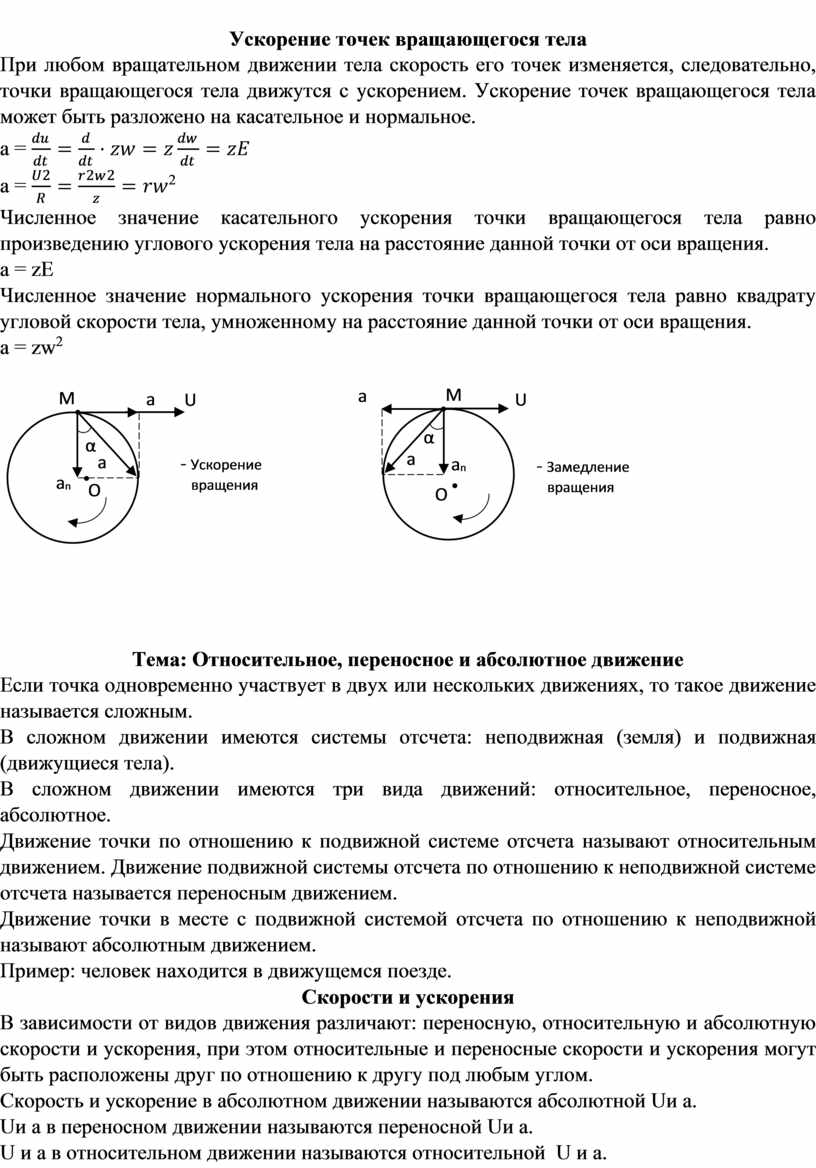
U ABC = OTH 2 + V пер 2 +2 V отн –
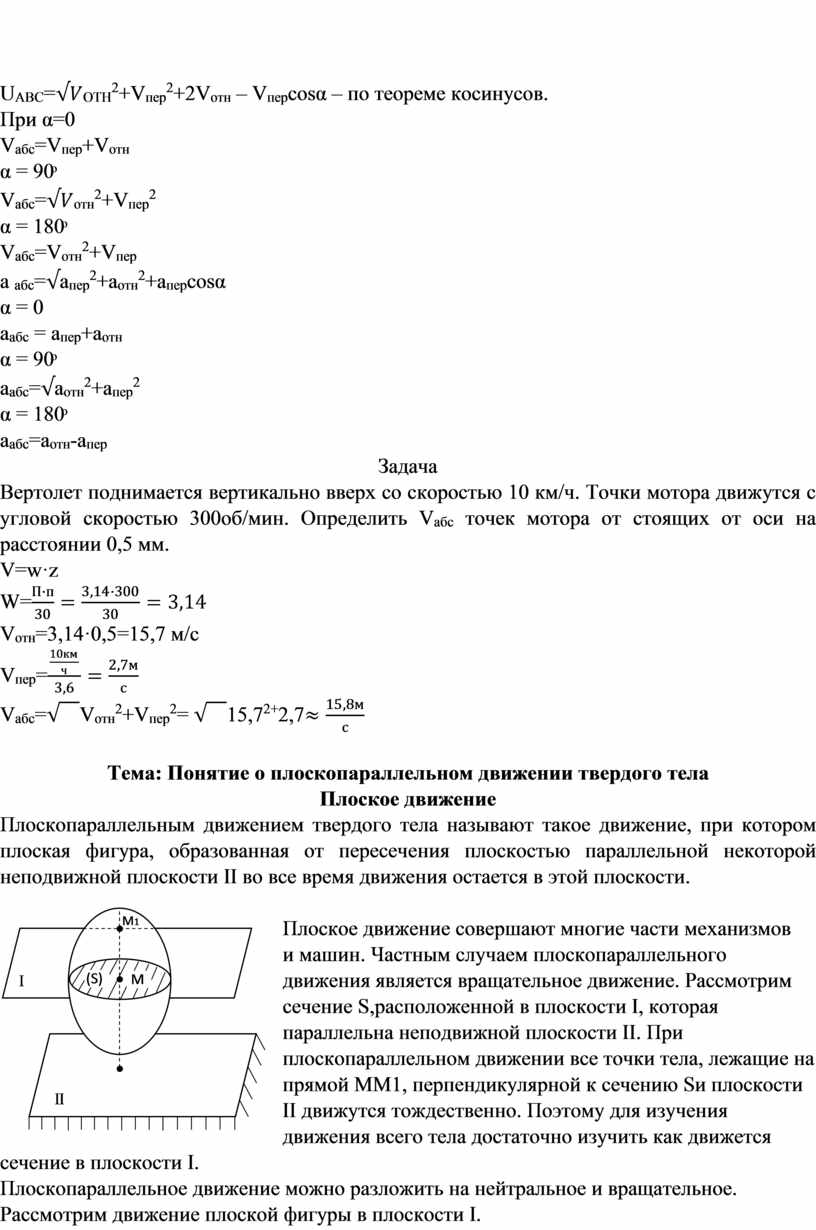
Предположим, что плоская фигура
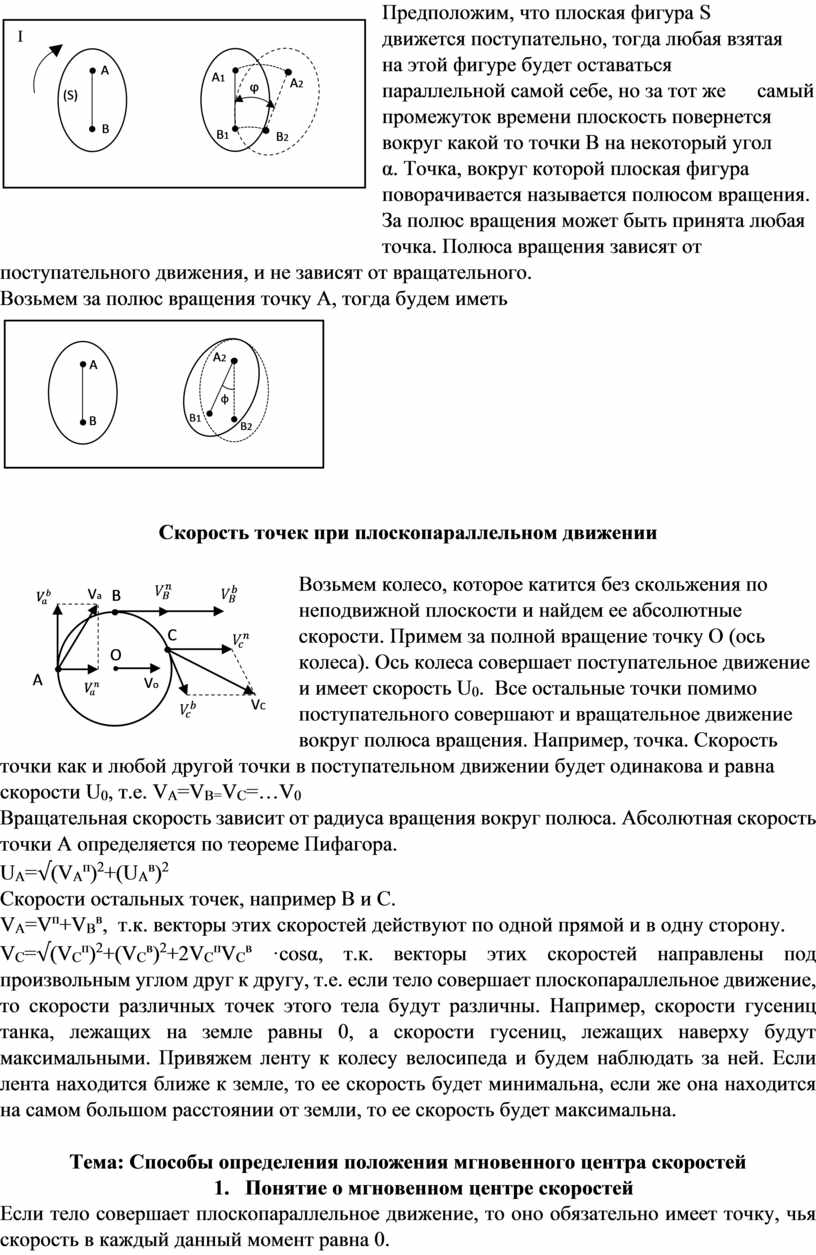
Возьмем точку Р. Все точки этого тела совершат поступательное движение и имеют одну и ту же скорость
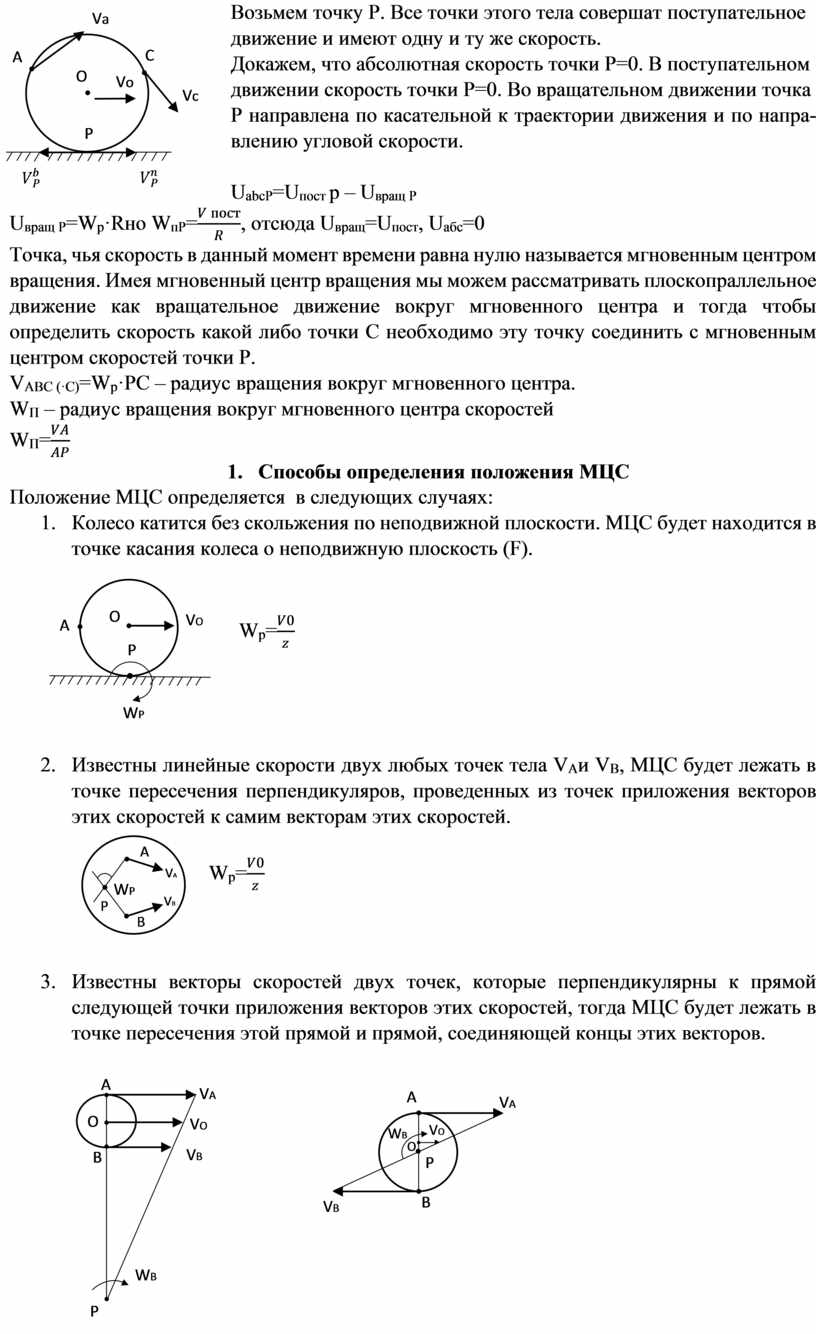
Задачи Колесо автомобиля
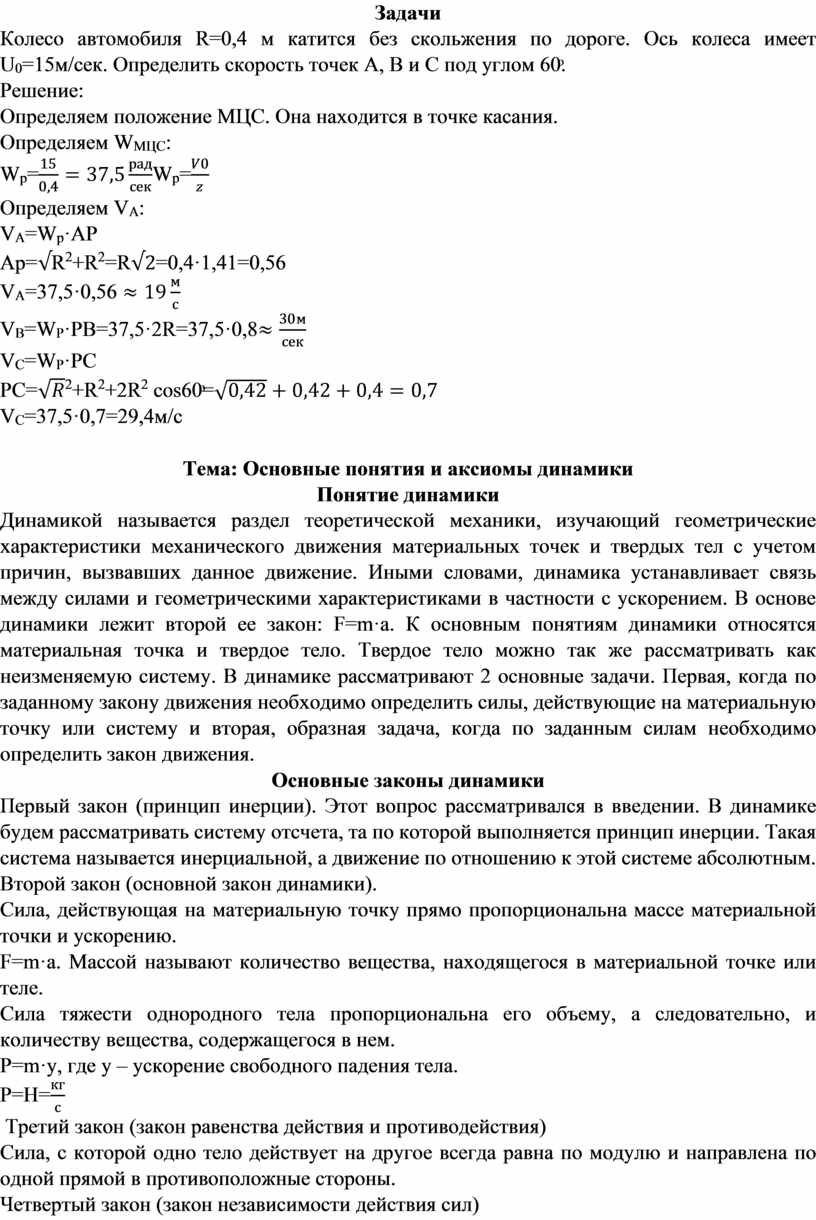
Ускорение, полученное телом от одной силы, равно сумме ускорений, полученных от системы сил, приложенных к материальной точке или твердому телу
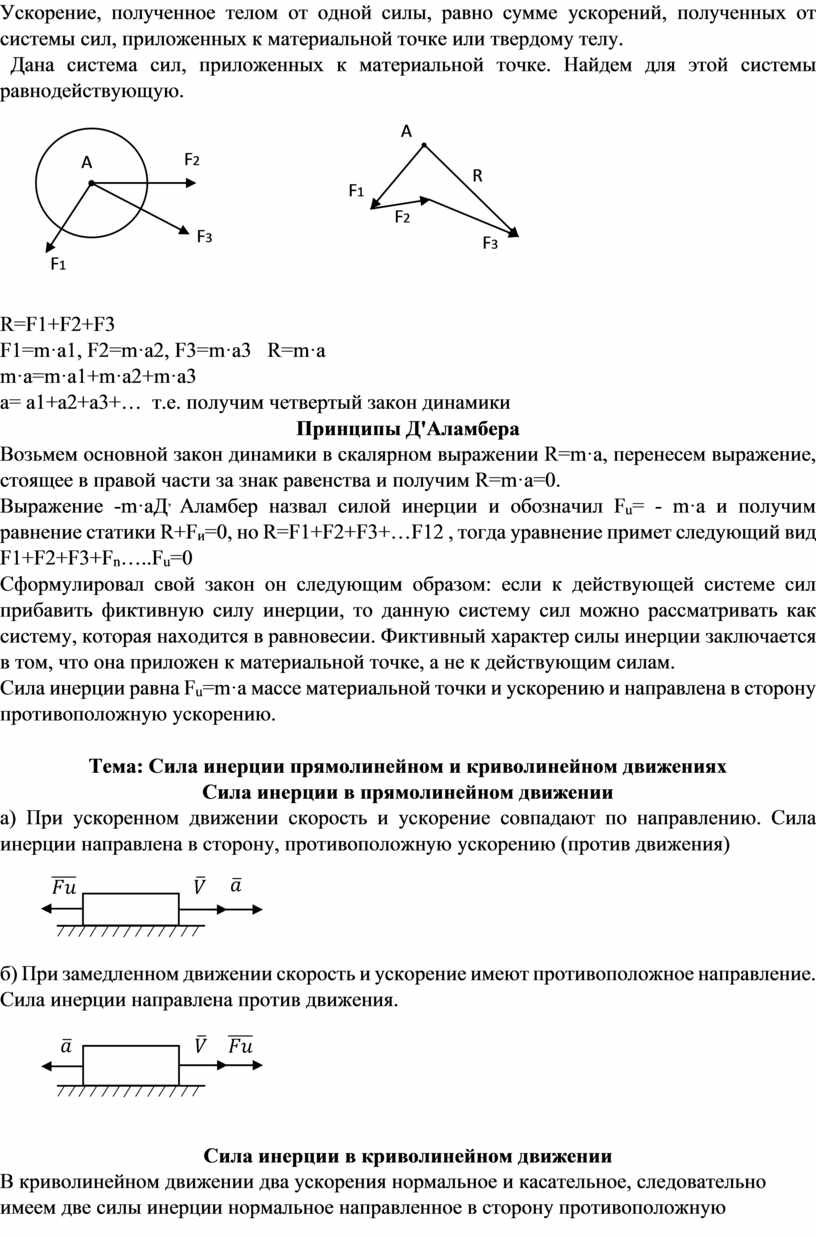
Если тангенциальное ускорение равно 0, то имеем равномерное движение, а при равномерном движении тангенциальная сила инерции равна 0

Тема: Решение задач методами кинематики
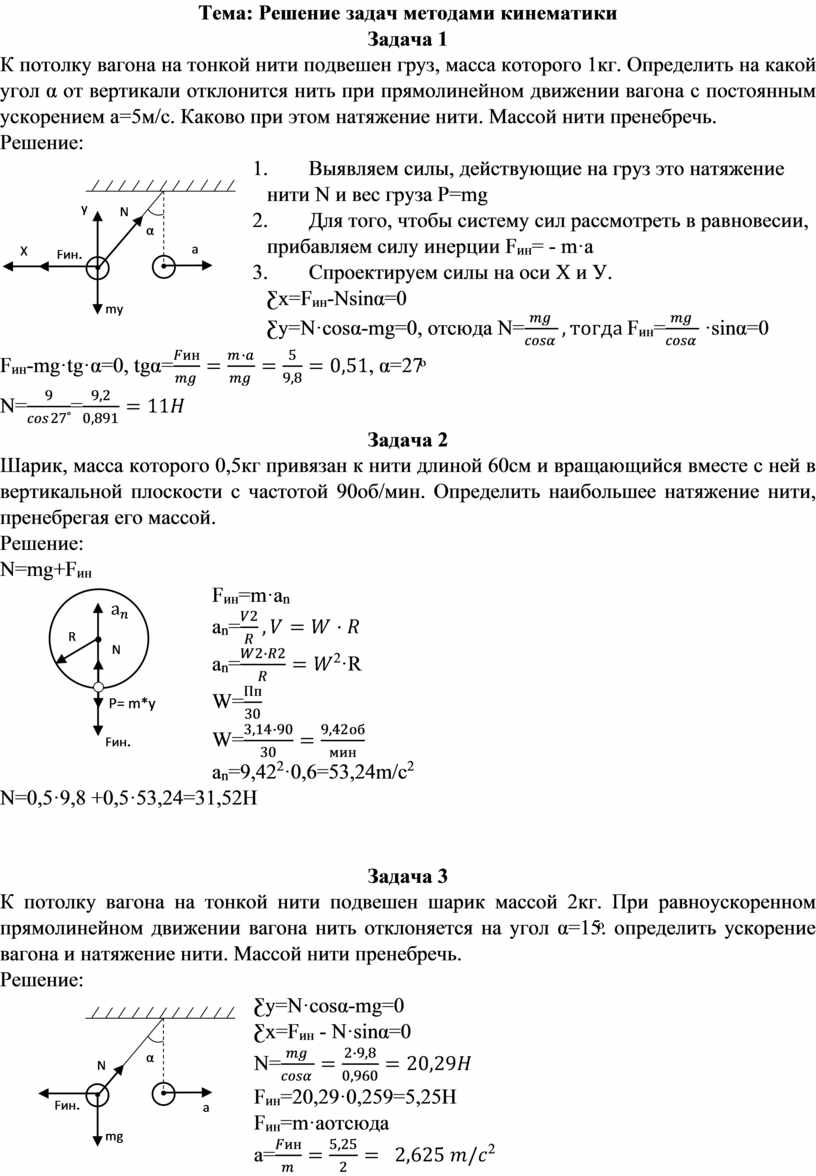
Задача 4 Груз в 5 тонн подвешен на тросе длиной 4 м, совершает колебательное движение и при переходе через положение равновесия имеет скорость
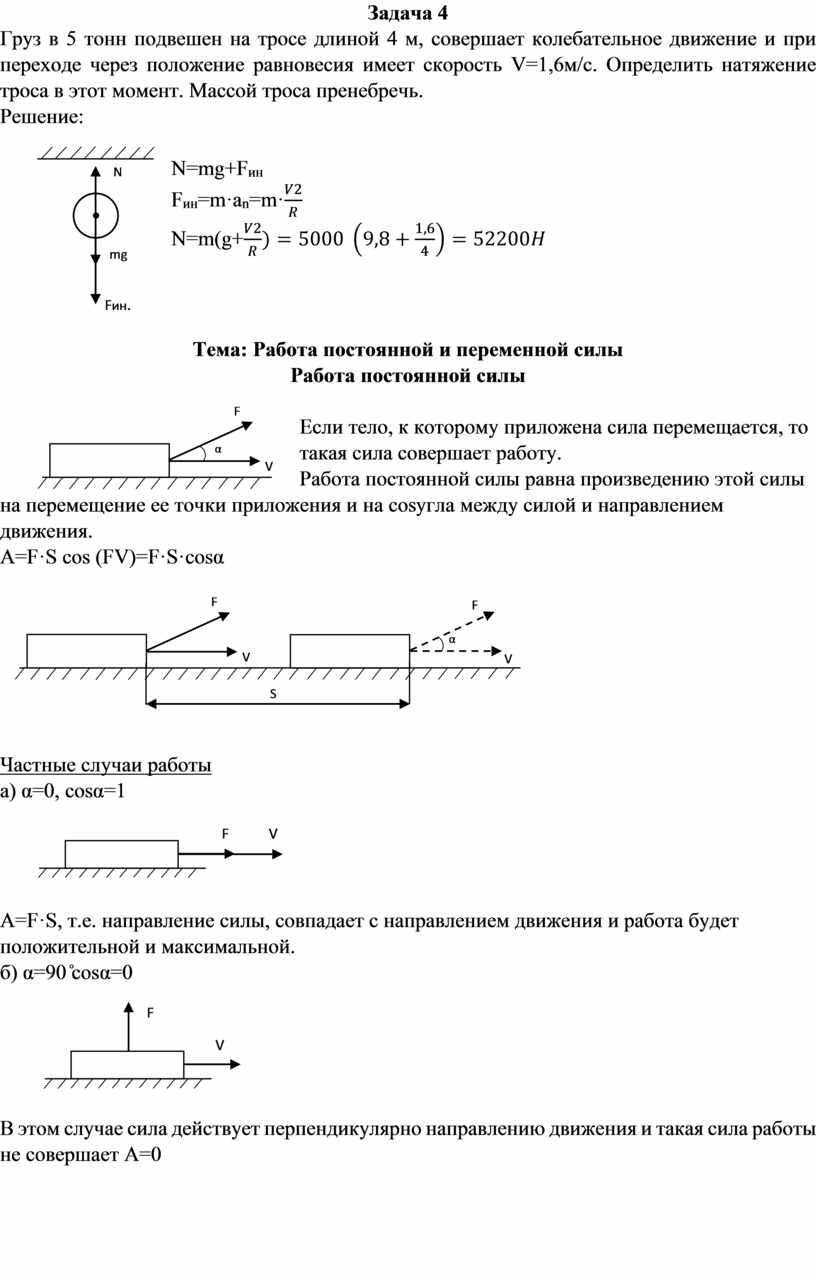
А=- F · S В этом случае сила действует в сторону, противоположную движению и такая сила совершает отрицательную работу
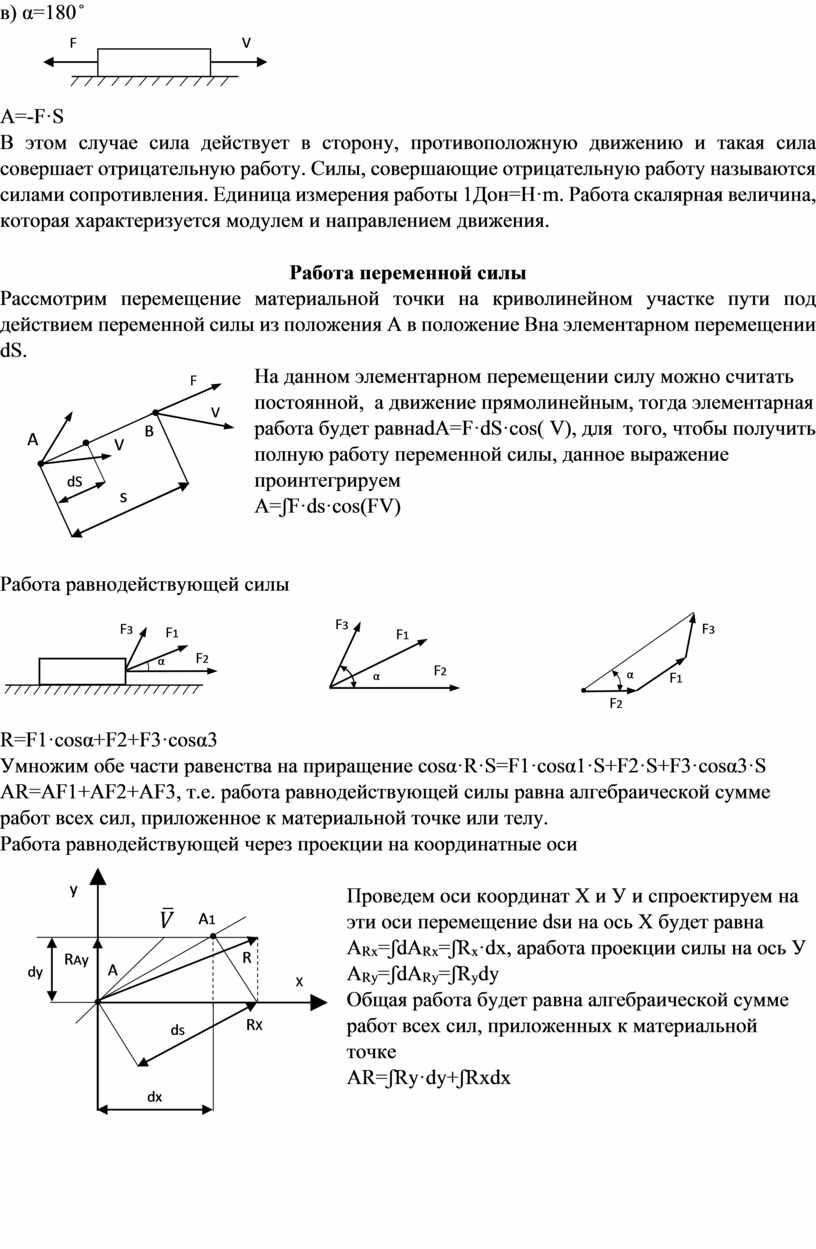
Работа веса тела Пусть тело под действием собственного веса перемещается из положения
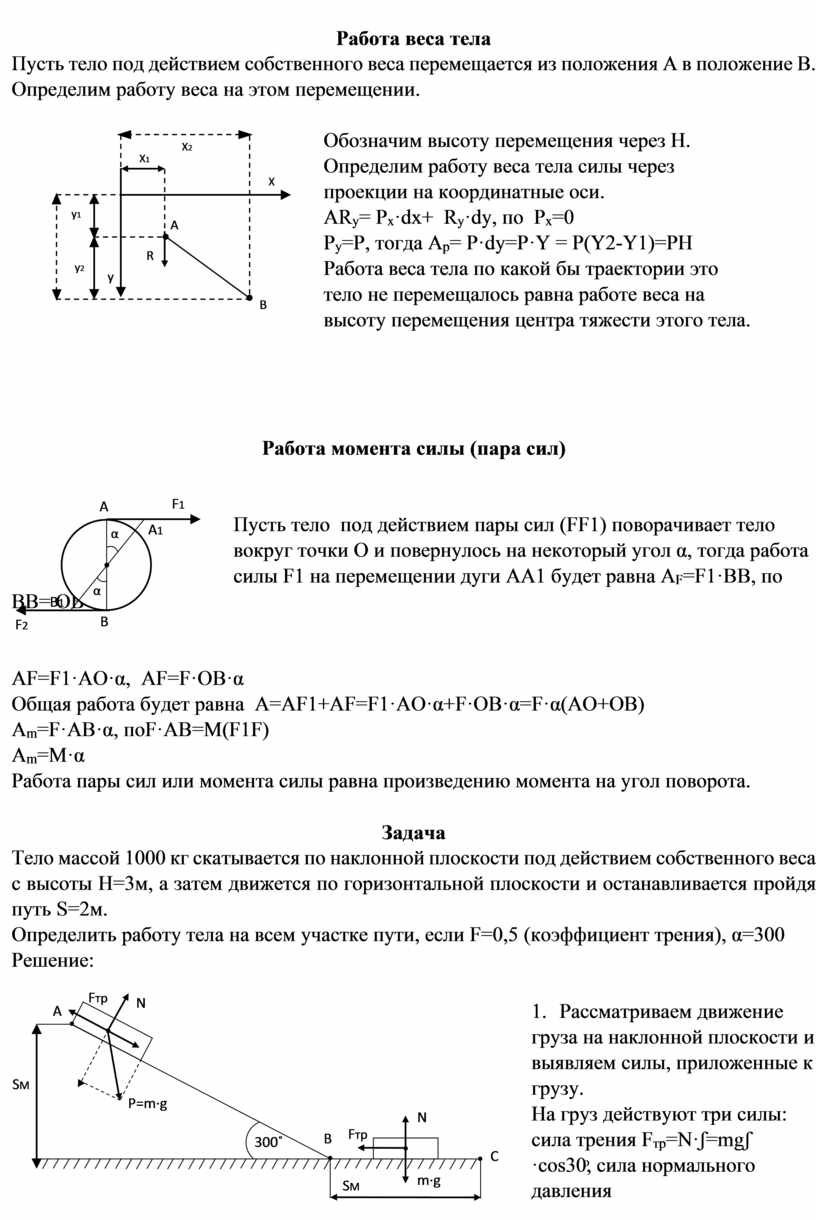
N = P · cos 30ͦ= mg · cos 30ͦ и собственного веса
Задача 3 Найти мощность ДВС, если среднее давление на поршень в течение всего хода равно 49Н/см 3 , длина хода поршня 40см, площадь поршня 300см2,…
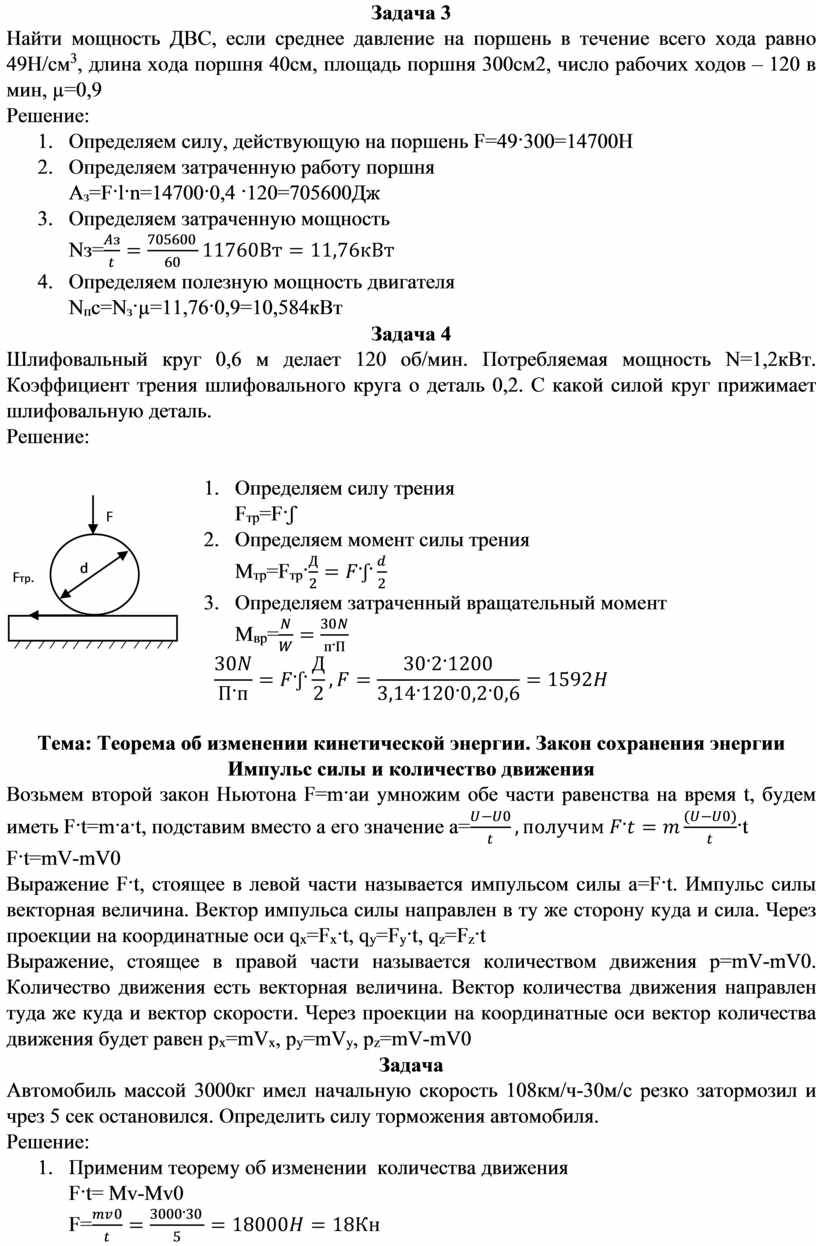
Теорема об изменении кинетической энергии
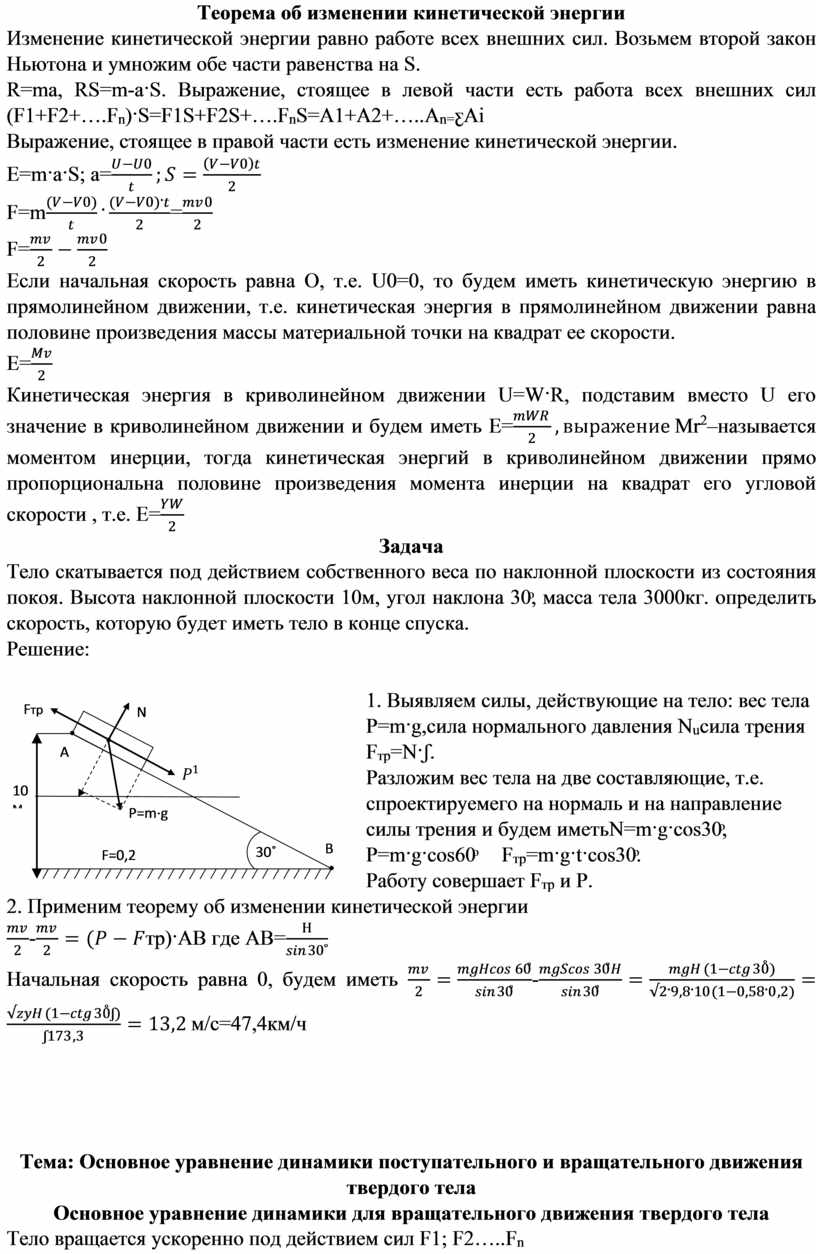
F ин = m·a n ; F ин = m·a и составим уравнение моментов относительно оси вращения
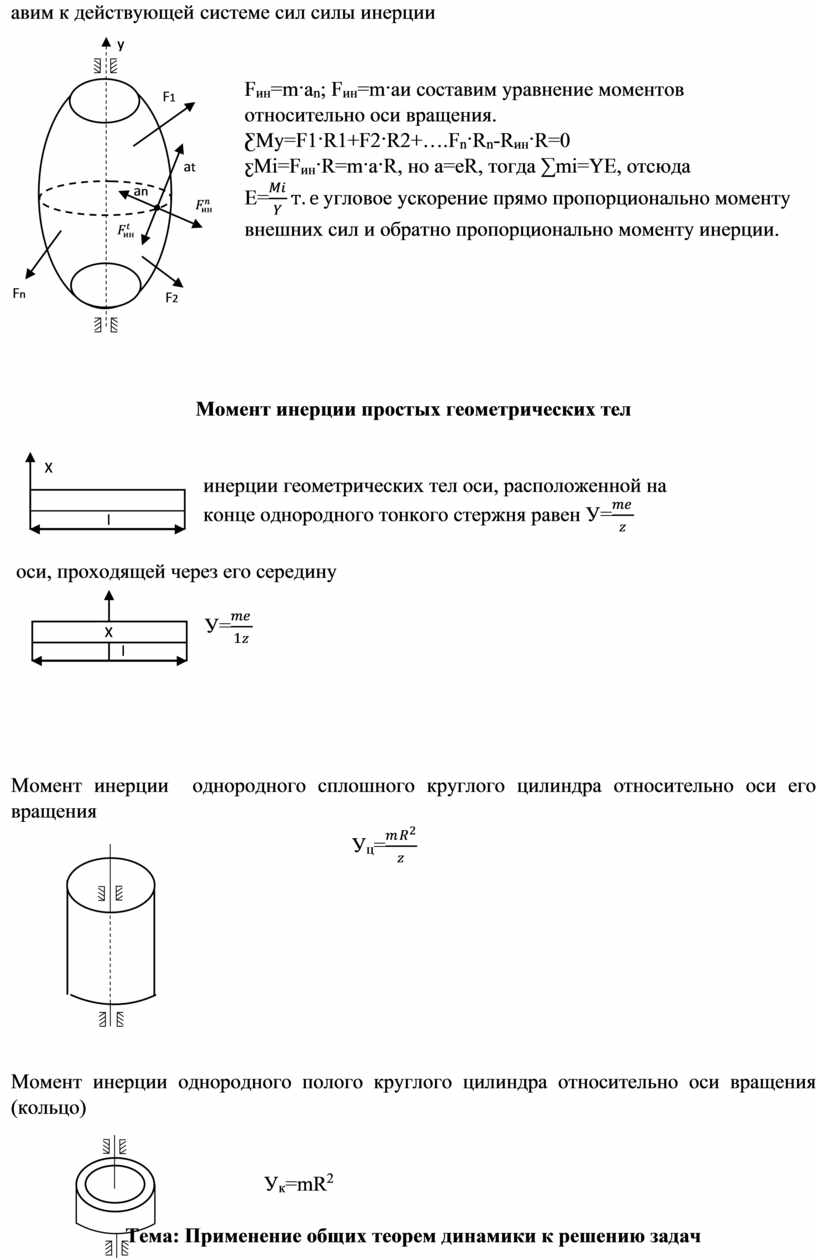
Задача 1 Автомобиль массой 900кг, имел скорость 108км/ч 30м/с, резко затормозил
У·Е=ƹМ i 1. Определим момент инерции ротора
© ООО «Знанио»
С вами с 2009 года.
![]()