Кинематические пары, цепи и схемы. Базовым элементом робота является манипулятор - механизм, обладающий несколькими степенями подвижности, который предназначен для перемещения и ориентации объектов в рабочем пространстве. Многозвенная конструкция манипулятора заканчивается сменным схватом (иногда называют захватом) - инструментом, предназначенным для захвата объектов определенной формы.Лекция Кинематические пары, цепи и схемы
Кинематические пары, цепи и схемы.
Базовым элементом робота является манипулятор механизм,
обладающий несколькими степенями подвижности, который предназначен для
перемещения и ориентации объектов в рабочем пространстве. Многозвенная
конструкция манипулятора заканчивается сменным схватом (иногда называют
захватом) инструментом, предназначенным для захвата объектов
определенной формы. Вместо схвата на конце этой конструкции может быть
закреплен сменный инструмент (гайковерт, фреза, сверло, метчик и т.п.). В
этом случае с помощью манипулятора могут быть выполнены различные
технологические операции, например зачистка заготовок, нарезание резьбы,
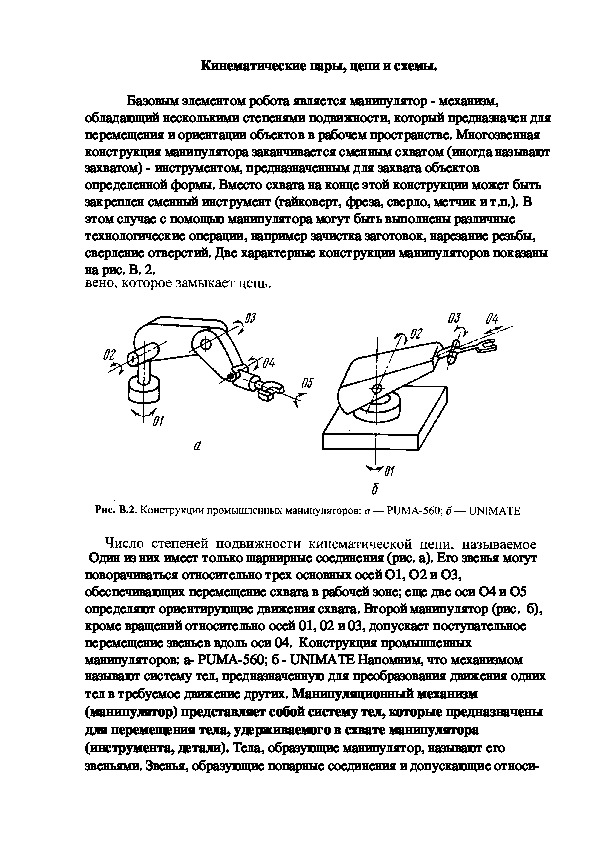
сверление отверстий. Две характерные конструкции манипуляторов показаны
на рис. В. 2.
Один из них имеет только шарнирные соединения (рис. а). Его звенья могут
поворачиваться относительно трех основных осей О1, О2 и О3,
обеспечивающих перемещение схвата в рабочей зоне; еще две оси О4 и О5
определяют ориентирующие движения схвата. Второй манипулятор (рис. б),
кроме вращений относительно осей 01, 02 и 03, допускает поступательное
перемещение звеньев вдоль оси 04. Конструкция промышленных
манипуляторов: а PUMA560; б UNIMATE Напомним, что механизмом
называют систему тел, предназначенную для преобразования движения одних
тел в требуемое движение других. Манипуляционный механизм
(манипулятор) представляет собой систему тел, которые предназначены
для перемещения тела, удерживаемого в схвате манипулятора
(инструмента, детали). Тела, образующие манипулятор, называют его
звеньями. Звенья, образующие попарные соединения и допускающие относительные перемещения, называют кинематическими парами. Каждое звено,
рассматриваемое как твердое тело, имеет шесть степеней свободы. Если в
кинематической паре на относительное движение звеньев наложено S условий
связи (число S определяет класс кинематической пары), то число степеней
кинематической пары равно h = 6 – S. При S = 0 звенья взаимно свободны, а
при S = 6 взаимно неподвижны, т.е. 1 < S < 6. Так, для шарового шарнира S
= 3 , h = 3 ; для цилиндрической пары S = 4, h = 2 ; для простого
цилиндрического шарнира и призматической пары поступательного движения
S = 5, h =1. Систему звеньев, образующих кинематические пары, называют ки
нематической цепью. Если в цепи имеются звенья, входящие только в одну
кинематическую пару, то цепь называют незамкнутой (разомкнутой). В
противном случае, т.е. если каждое звено входит, как минимум, в две
кинематические пары, цепь считают замкнутой. Кинематические цепи
манипуляторов, показанные на рис.В.2, являются незамкнутыми; если же один
из них обрабатывает поверхность, расположенную на неподвижном основании,
то его кинематическая схема совместно с инструментом и объектом работы
образует замкнутую кинематическую цепь. При этом следует учитывать
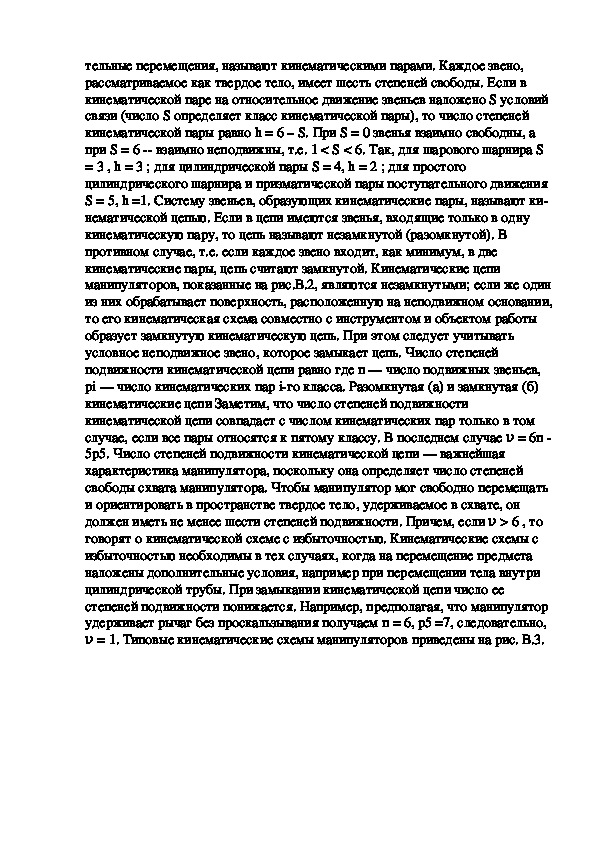
условное неподвижное звено, которое замыкает цепь. Число степеней
подвижности кинематической цепи равно где п — число подвижных звеньев,
pi — число кинематических пар iгo класса. Разомкнутая (а) и замкнутая (б)
кинематические цепи Заметим, что число степеней подвижности
кинематической цепи совпадает с числом кинематических пар только в том
ν
случае, если все пары относятся к пятому классу. В последнем случае
= 6п
5р5. Число степеней подвижности кинематической цепи — важнейшая
характеристика манипулятора, поскольку она определяет число степеней
свободы схвата манипулятора. Чтобы манипулятор мог свободно перемещать
и ориентировать в пространстве твердое тело, удерживаемое в схвате, он
ν
> 6 , то
должен иметь не менее шести степеней подвижности. Причем, если
говорят о кинематической схеме с избыточностью. Кинематические схемы с
избыточностью необходимы в тех случаях, когда на перемещение предмета
наложены дополнительные условия, например при перемещении тела внутри
цилиндрической трубы. При замыкании кинематической цепи число ее
степеней подвижности понижается. Например, предполагая, что манипулятор
удерживает рычаг без проскальзывания получаем п = 6, р5 =7, следовательно,
ν
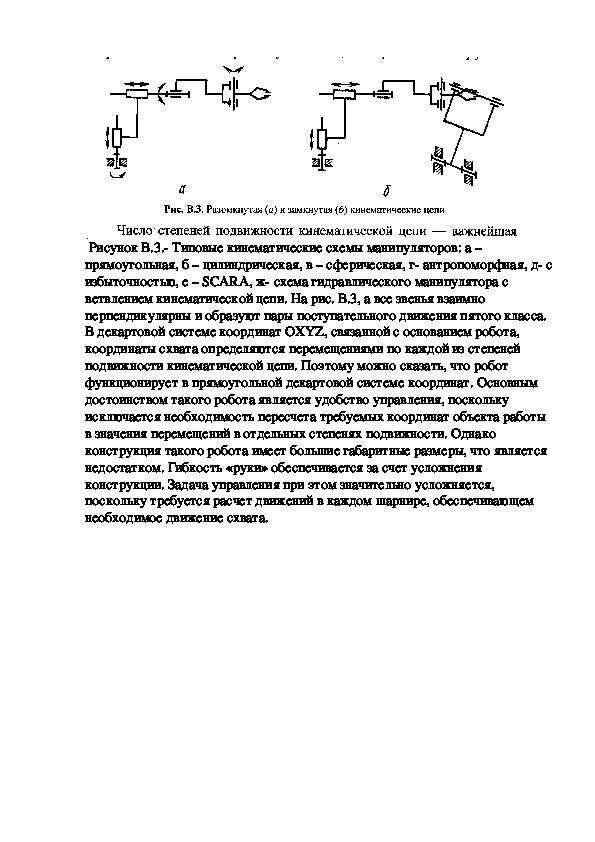
= 1. Типовые кинематические схемы манипуляторов приведены на рис. В.3.Рисунок В.3. Типовые кинематические схемы манипуляторов: а –
прямоугольная, б – цилиндрическая, в – сферическая, г антропоморфная, д с
избыточностью, е – SCARA, ж схема гидравлического манипулятора с
ветвлением кинематической цепи. На рис. В.3, а все звенья взаимно
перпендикулярны и образуют пары поступательного движения пятого класса.
В декартовой системе координат OXYZ, связанной с основанием робота,
координаты схвата определяются перемещениями по каждой из степеней
подвижности кинематической цепи. Поэтому можно сказать, что робот
функционирует в прямоугольной декартовой системе координат. Основным
достоинством такого робота является удобство управления, поскольку
исключается необходимость пересчета требуемых координат объекта работы
в значения перемещений в отдельных степенях подвижности. Однако
конструкция такого робота имеет большие габаритные размеры, что является
недостатком. Гибкость «руки» обеспечивается за счет усложнения
конструкции. Задача управления при этом значительно усложняется,
поскольку требуется расчет движений в каждом шарнире, обеспечивающем
необходимое движение схвата.