К основным задачам механики манипуляторов можно отнести:
• манипразработку методов синтеза и анализа исполнительных механизмов (включая механизмы приводов);
• программирование движения манипулятора;
• расчет управляющих усилий и реакций в КП;
• уравновешивание механизмов манипуляторов;
Эти задачи решаются на базе общих методов исследования структуры, геометрии, кинематики и динамики систем с пространственными много подвижными механизмами. Каждая из рассматриваемых задач может быть сформулирована как прямая (задача анализа) или как обратная (задача синтеза).Лекция Задачи механики манипуляторов
Задачи механики манипуляторов
К основным задачам механики манипуляторов можно отнести:
∙ манипразработку методов синтеза и анализа исполнительных механизмов
(включая механизмы приводов);
∙ программирование движения манипулятора;
∙ расчет управляющих усилий и реакций в КП;
∙ уравновешивание механизмов манипуляторов;
∙ другие задачи.
Эти задачи решаются на базе общих методов исследования структуры,
геометрии, кинематики и динамики систем с пространственными много
подвижными механизмами. Каждая из рассматриваемых задач может быть
сформулирована как прямая (задача анализа) или как обратная (задача
синтеза). При определении функций положения механизма, в прямой задаче
находят закон изменения абсолютных координат выходного звена по заданным
законам изменения относительных или абсолютных координат звеньев. В
обратной – по заданному закону движения схвата находят законы изменения
координат звеньев, обычно, линейных или угловых перемещений в приводах.
Решение обратной задачи или задачи синтеза более сложно, так как часто она
имеет множество допустимых решений, из которых необходимо выбрать
оптимальное. В обратной задаче кинематики по требуемому закону изменения
скоростей и ускорений выходного звена определяются соответствующие
законы изменения скоростей и ускорений в приводах манипулятора. Обратная
задача динамики заключается в определении закона изменения управляющих
сил и моментов в приводах, обеспечивающих заданный закон движения
выходного звена.
Кинематический анализ механизма манипулятора.
Первая и основная задача кинематики – определение функции положения.
Для пространственных механизмов наиболее эффективными методами
решения этой задачи являются векторный метод и метод преобразования
координат. При решении прямой задачи о положении схвата манипулятора
обычно используют метод преобразования координат. Из множества методов
преобразования координат [ 1, 2 ] , которые отличаются друг от друга
правилами выбора осей локальных систем координат, для манипуляторов
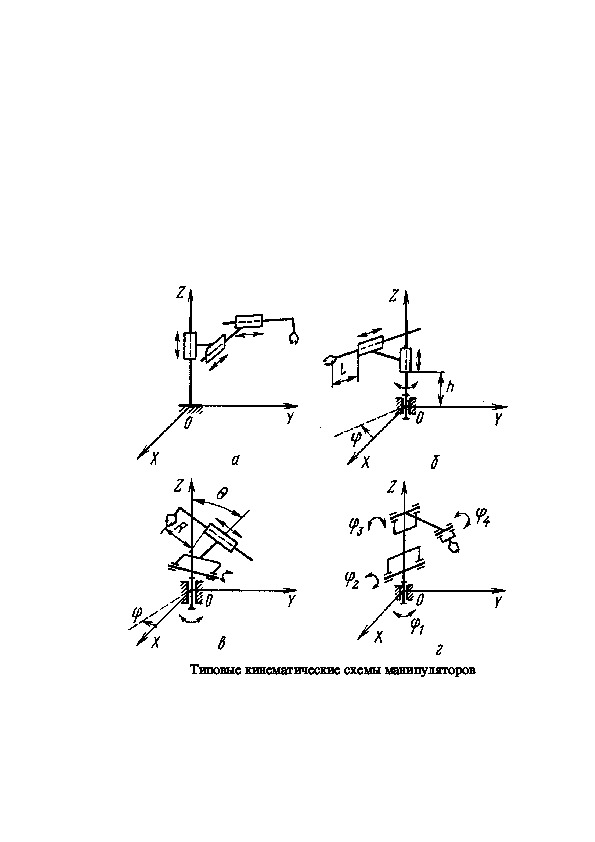
обычно используется метод Денавита и Хартенберга.Типовые кинематические схемы манипуляторовРабочие органы(схваты) манипуляторов
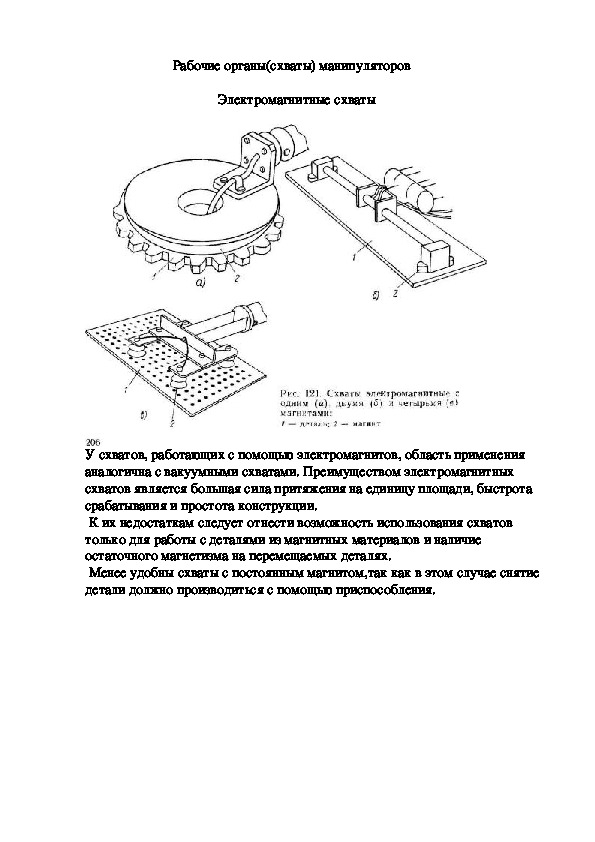
Электромагнитные схваты
У схватов, работающих с помощью электромагнитов, область применения
аналогична с вакуумными схватами. Преимуществом электромагнитных
схватов является большая сила притяжения на единицу площади, быстрота
срабатывания и простота конструкции.
К их недостаткам следует отнести возможность использования схватов
только для работы с деталями из магнитных материалов и наличие
остаточного магнетизма на перемещаемых деталях.
Менее удобны схваты с постоянным магнитом,так как в этом случае снятие
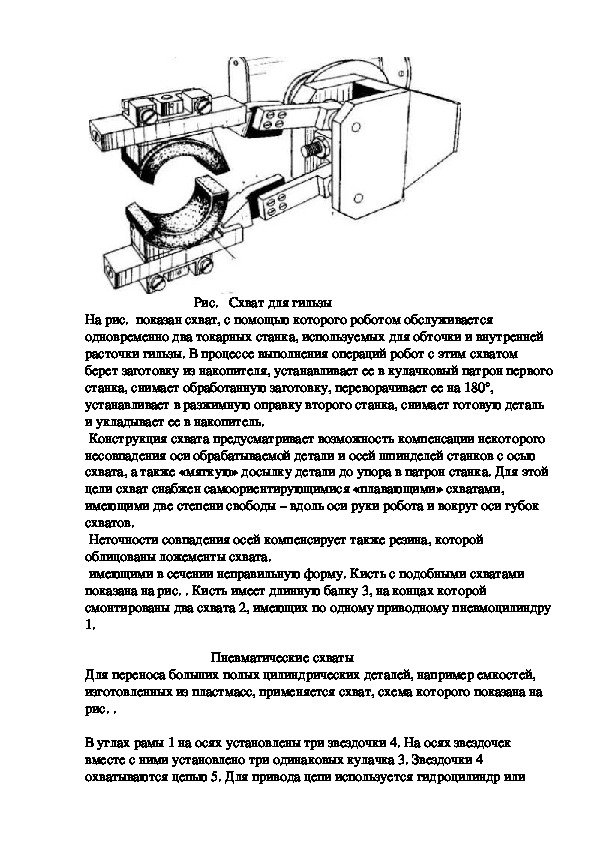
детали должно производиться с помощью приспособления.Рис. Схват для гильзы
На рис. показан схват, с помощью которого роботом обслуживается
одновременно два токарных станка, используемых для обточки и внутренней
расточки гильзы. В процессе выполнения операций робот с этим схватом
берет заготовку из накопителя, устанавливает ее в кулачковый патрон первого
станка, снимает обработанную заготовку, переворачивает ее на 180°,
устанавливает в разжимную оправку второго станка, снимает готовую деталь
и укладывает ее в накопитель.
Конструкция схвата предусматривает возможность компенсации некоторого
несовпадения оси обрабатываемой детали и осей шпинделей станков с осью
схвата, а также «мягкую» досылку детали до упора в патрон станка. Для этой
цели схват снабжен самоориентирующимися «плавающими» схватами,
имеющими две степени свободы – вдоль оси руки робота и вокруг оси губок
схватов.
Неточности совпадения осей компенсирует также резина, которой
облицованы ложементы схвата.
имеющими в сечении неправильную форму. Кисть с подобными схватами
показана на рис. . Кисть имеет длинную балку 3, на концах которой
смонтированы два схвата 2, имеющих по одному приводному пневмоцилиндру
1.
Пневматические схваты
Для переноса больших полых цилиндрических деталей, например емкостей,
изготовленных из пластмасс, применяется схват, схема которого показана на
рис. .
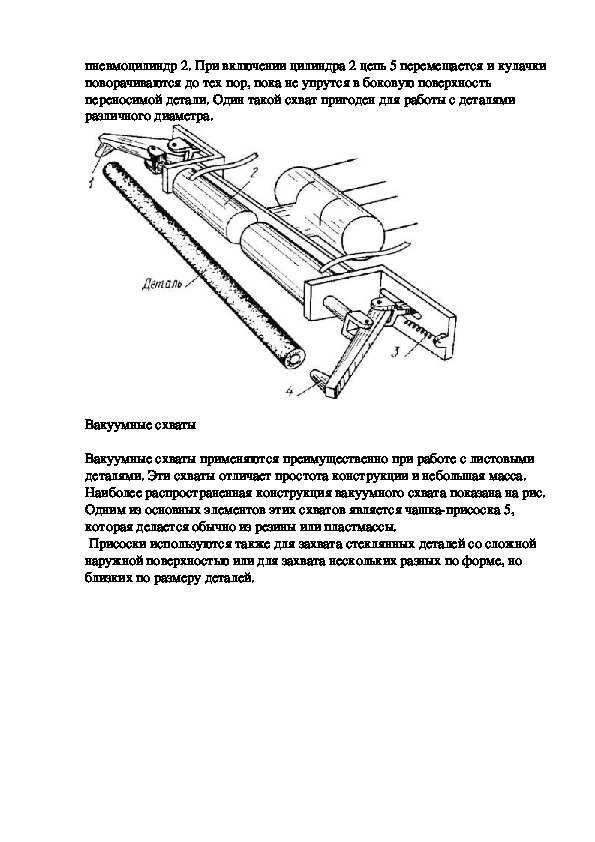
В углах рамы 1 на осях установлены три звездочки 4. На осях звездочек
вместе с ними установлено три одинаковых кулачка 3. Звездочки 4
охватываются цепью 5. Для привода цепи используется гидроцилиндр илипневмоцилиндр 2. При включении цилиндра 2 цепь 5 перемещается и кулачки
поворачиваются до тех пор, пока не упрутся в боковую поверхность
переносимой детали. Один такой схват пригоден для работы с деталями
различного диаметра.
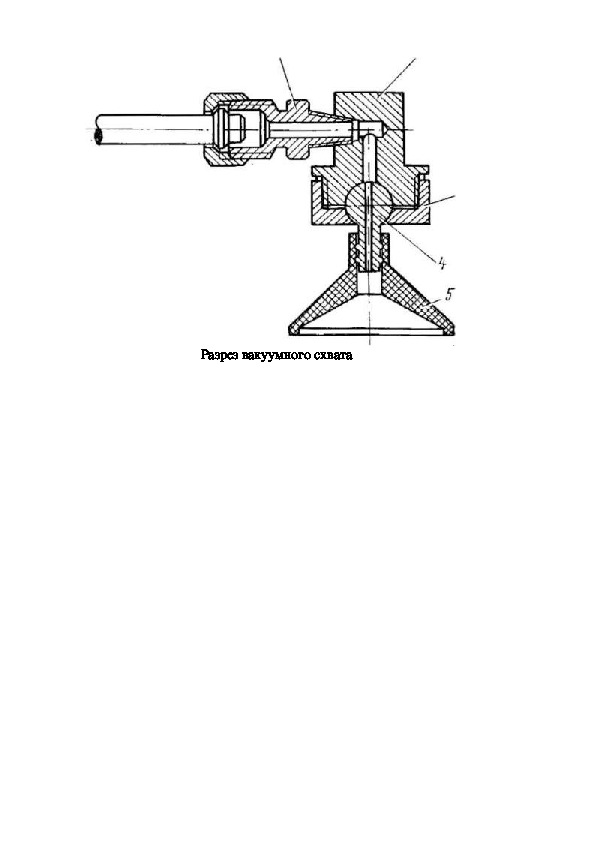
Вакуумные схваты
Вакуумные схваты применяются преимущественно при работе с листовыми
деталями. Эти схваты отличает простота конструкции и небольшая масса.
Наиболее распространенная конструкция вакуумного схвата показана на рис.
Одним из основных элементов этих схватов является чашкаприсоска 5,
которая делается обычно из резины или пластмассы.
Присоски используются также для захвата стеклянных деталей со сложной
наружной поверхностью или для захвата нескольких разных по форме, но
близких по размеру деталей.Разрез вакуумного схвата