Поделиться

4 МЕТОДЫ ПОИСКА ГЛОБАЛЬНОГО МИНИМУМА ОДНОМЕРНЫХ МНОГОЭКСТРЕМАЛЬНЫХ ФУНКЦИЙ
Некоторые методы решения многомерных задач оптимизации (если размерность вектора варьируемых параметров X больше единицы, то детерминированная задача оптимизации называется многопараметрической задачей оптимизации) требуют решения одномерной задачи глобальной оптимизации (ставится задача отыскания глобального минимума критерия оптимальности f(x)).
4.1 Метод перебора. Одномерный метод Монте-Карло
Рассматривается следующая одномерная задача условной глобальной оптимизации (если задача оптимизации является задачей условной оптимизации и отыскивается глобальный минимум критерия оптимальности f(x), то эта задача оптимизации называется задачей глобальной условной оптимизации): найти минимум, вообще говоря, многоэкстремальной функции f(x), определенной в замкнутой области допустимых значений D = [a;b]:
![]() (4.1)
(4.1)
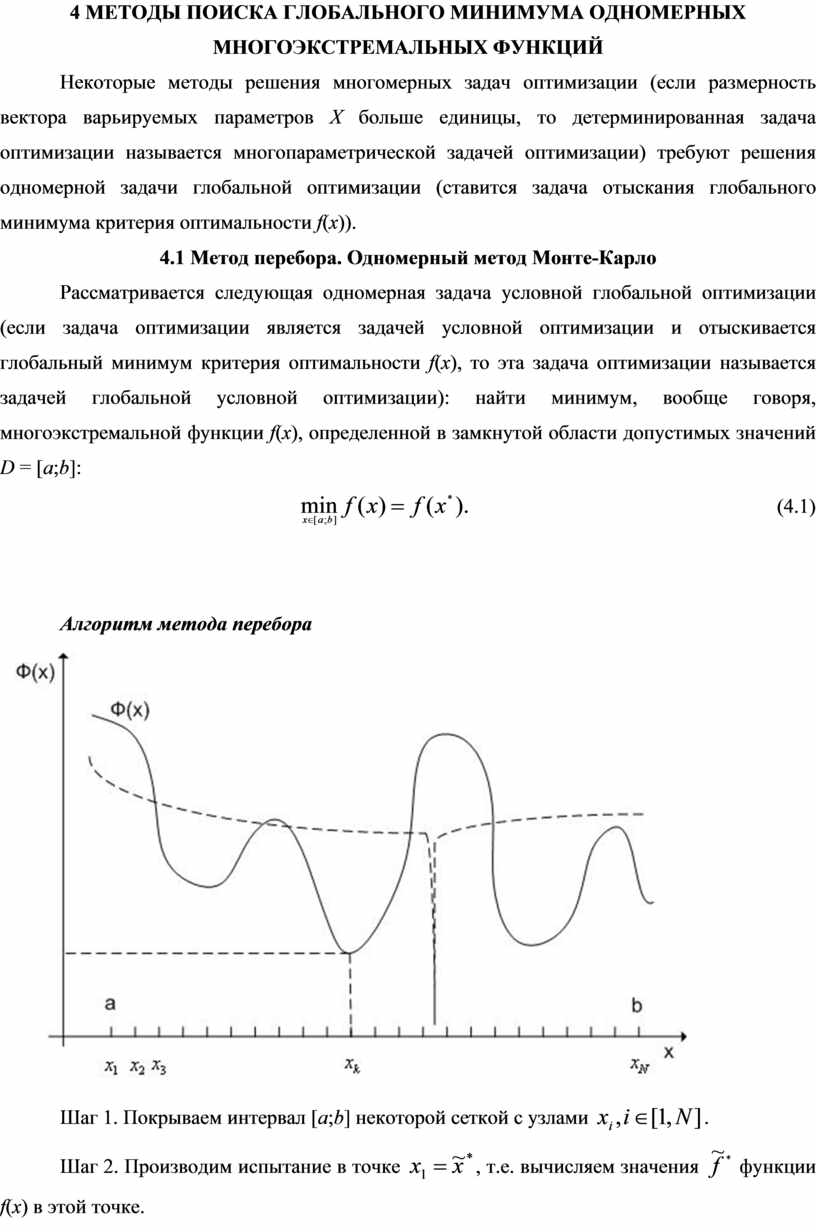
Алгоритм метода перебора
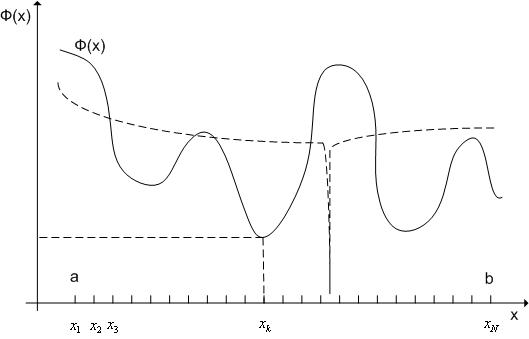 |
Рис. 4.1. Иллюстрация метода перебора
Шаг 1. Покрываем интервал [a;b] некоторой сеткой с узлами ![]() .
.
Шаг 2. Производим испытание в точке ![]() ,
т.е. вычисляем значения
,
т.е. вычисляем значения ![]() функции f(x) в этой точке.
функции f(x) в этой точке.
Шаг 3. Полагаем r = 2.
Шаг 4. Производим испытание в точке xr и вычисляем значение fr = f(xr) функции f(x) в этой точке.
Шаг 5. Если ![]() , то
выполняем присваивания
, то
выполняем присваивания ![]() .
.
Шаг 6. Если r < N, то выполняем присваивание r = r + 1 и переходим к шагу 4, иначе заканчиваем вычисления.
Шаг 7. Принимаем ![]() в качестве приближенного
значения точки глобального минимума функции f(x) на интервале [a;b] или каким-либо из рассмотренных одномерных методов
локальной оптимизации организуем в окрестности точки поиск локального минимума
этой функции.
в качестве приближенного
значения точки глобального минимума функции f(x) на интервале [a;b] или каким-либо из рассмотренных одномерных методов
локальной оптимизации организуем в окрестности точки поиск локального минимума
этой функции.
При выборе количества узлов сетки ![]() можно
исходить из требуемой точности решения
можно
исходить из требуемой точности решения ![]() –
максимальный шаг сетки принять равным этой величине.
–
максимальный шаг сетки принять равным этой величине.
Замечание. Метод перебора, как и любой другой метод глобальной оптимизации, при отсутствии априорной информации о свойствах минимизируемой функции не гарантирует нахождение глобального минимума (пунктирный график на рис. 4.1).
Алгоритм одномерного метода Монте-Карло
Шаг 1. Генерируем с помощью какого-либо программного генератора случайных
чисел, равномерно распределенных в интервале [a;b], случайное число ![]() .
.
Шаг 2. Производим испытание в точке ![]() и
вычисляем значения
и
вычисляем значения ![]() функции f(x) в этой точке.
функции f(x) в этой точке.
Шаг 3. Полагаем r = 2.
Шаг 4. Аналогично шагу 1 генерируем случайное число ![]() .
.
Шаг 5. Производим испытание в точке ![]() –
вычисляем значение fr = f(xr) функции f(x) в этой точке.
–
вычисляем значение fr = f(xr) функции f(x) в этой точке.
Шаг 6. Если ![]() , то выполняем
присваивания
, то выполняем
присваивания ![]() .
.
Шаг 7. Если r < N, то выполняем присваивание r = r + 1 и переходим к шагу 4, иначе заканчиваем вычисления. Здесь N – количество испытаний.
Шаг 8. Принимаем ![]() в качестве приближенного
значения точки глобального минимума функции f(x) на интервале [a;b] или каким-либо из рассмотренных одномерных методов
локальной оптимизации организуем в окрестности точки
в качестве приближенного
значения точки глобального минимума функции f(x) на интервале [a;b] или каким-либо из рассмотренных одномерных методов
локальной оптимизации организуем в окрестности точки ![]() поиск
локального минимума этой функции.
поиск
локального минимума этой функции.
При достаточно большом N метода гарантирует нахождение глобального минимума с высокой вероятностью.
4.2 Метод выделения интервалов унимодальности
Рассмотрим одномерную задачу условной глобальной оптимизации: найти минимум одномерной многоэкстремальной функции f(x), определенной в замкнутой области допустимых значений D = [a;b] и имеющей в этой области конечное число минимумов (4.1).
Метод выделения интервалов унимодальности функции f(x) требует априорного знания оценки d > 0 минимального расстояния между локальными минимумами этой функции.
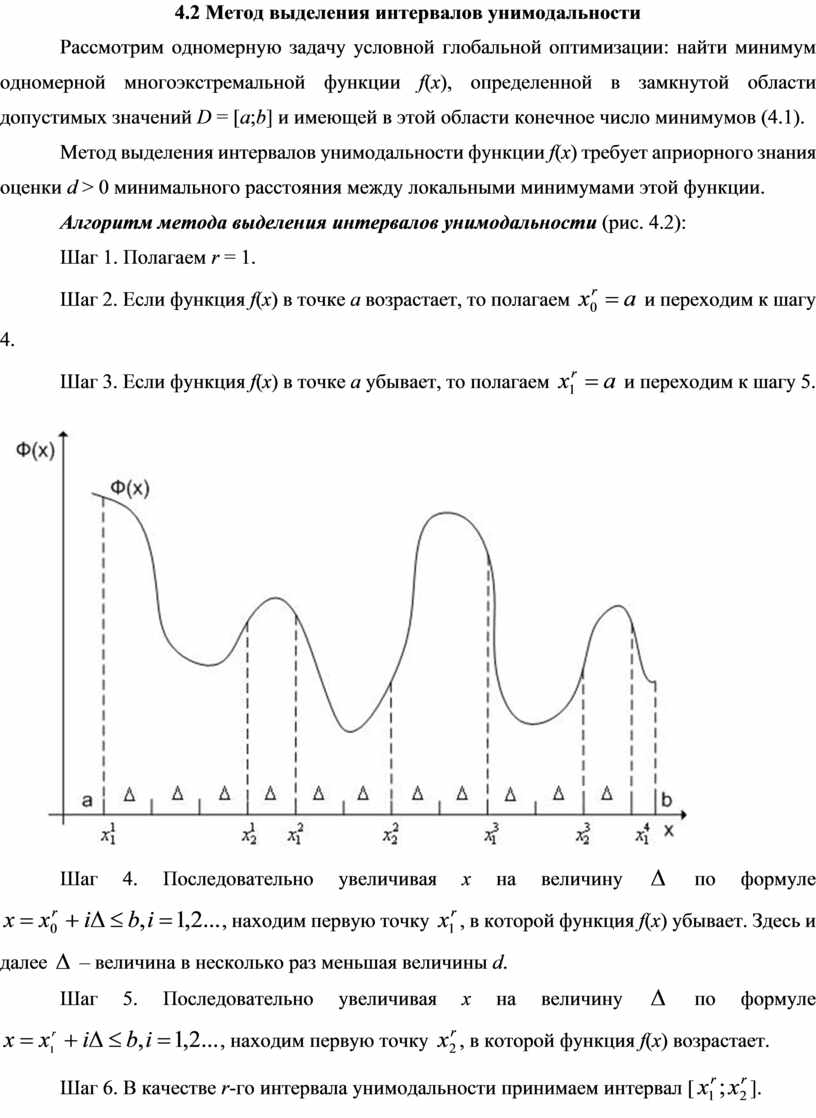
Алгоритм метода выделения интервалов унимодальности (рис. 4.2):
Шаг 1. Полагаем r = 1.
Шаг 2. Если функция f(x)
в точке a возрастает, то полагаем ![]() и переходим к шагу 4.
и переходим к шагу 4.
Шаг 3. Если функция f(x)
в точке a убывает, то полагаем ![]() и переходим к шагу 5.
и переходим к шагу 5.
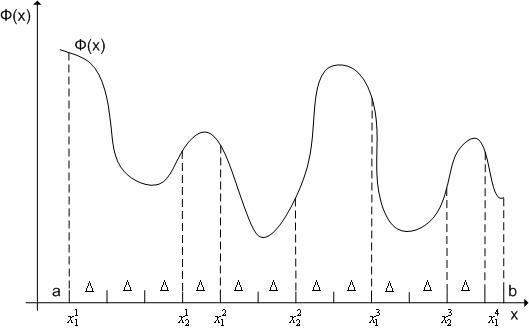
Рис. 4.2. К алгоритму метода выделения интервалов унимодальности
Шаг 4. Последовательно увеличивая х на величину ![]() по формуле
по формуле ![]() , находим первую точку
, находим первую точку ![]() , в которой функция f(x) убывает. Здесь и
далее
, в которой функция f(x) убывает. Здесь и
далее ![]() – величина в несколько раз меньшая
величины d.
– величина в несколько раз меньшая
величины d.
Шаг 5. Последовательно увеличивая х на величину ![]() по формуле
по формуле ![]() , находим первую точку
, находим первую точку ![]() , в которой функция f(x) возрастает.
, в которой функция f(x) возрастает.
Шаг 6. В качестве r-го интервала
унимодальности принимаем интервал [![]() ].
].
Шаг 7. Если интервал [a;b] исчерпан, переходим шагу 8, иначе полагаем ![]() и переходим к шагу 4.
и переходим к шагу 4.
Шаг 8. Положим, что общее количество найденных интервалов унимодальности
функции f(x)
равно N – 1. Каким-либо одномерным методом
локальной оптимизации находим локальный минимум функции f(x) в каждом из N – 1
интервалов унимодальности. Обозначим точки этих минимумов ![]() . Соответствующие значения функции f(x) обозначим
. Соответствующие значения функции f(x) обозначим ![]() . Добавим к точкам
. Добавим к точкам ![]() точки
точки ![]() и
вычислим соответствующие значения
и
вычислим соответствующие значения ![]() функции f(x).
функции f(x).
Шаг 9. Найдем минимальную из величин ![]() и
соответствующее значение аргумента:
и
соответствующее значение аргумента: ![]() .
.
Шаг 10. В качестве решения задачи глобальной оптимизации (4.1) примем
точку ![]() .
.
На рис. 4.2 интервалами унимодальности являются интервалы ![]() .
.
Для определения того, возрастает или убывает в данной точке функция f(x), может использоваться
ее первая разность в этой точке ![]() , где
, где ![]() х – некоторая малая
величина. А именно, если
х – некоторая малая
величина. А именно, если ![]() fx > 0,
то функция возрастает в точке х; иначе – убывает. Заметим, что при этом
в каждой точке требуется выполнить дополнительное испытание функции f(x).
fx > 0,
то функция возрастает в точке х; иначе – убывает. Заметим, что при этом
в каждой точке требуется выполнить дополнительное испытание функции f(x).
Если функция f(x)
непрерывно дифференцируема в интервале [a;b], то для определения того, возрастает или убывает в
данной точке эта функция, можно, очевидно, использовать значения первой
производной функции f(x)
в этой точке. А именно, если ![]() , то в точке x функция f(x) возрастает; в противном случае – убывает.
, то в точке x функция f(x) возрастает; в противном случае – убывает.
Замечание
Если априорная оценка d минимального
расстояния между локальными минимумами функции f(x) отсутствует, то никаких оснований полагать, что в
интервалах, выделенных с помощью рассмотренного алгоритма, функция f(x) является унимодальной
функцией. Пусть, например, функция f(x) на интервале [c;d] постоянна (рис. 4.3). Если к такой функции применить
алгоритм выделения интервалов унимодальности с любым ![]() >
0, то в качестве интервала унимодальности будет выделен интервал
>
0, то в качестве интервала унимодальности будет выделен интервал ![]() , на котором функция f(x) имеет бесконечное
количество минимумов, т.е. не является унимодальной функцией.
, на котором функция f(x) имеет бесконечное
количество минимумов, т.е. не является унимодальной функцией.
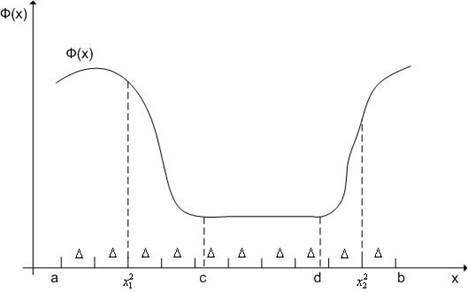
Рис. 4.3. Иллюстрация к замечанию
4.3 Метод аппроксимирующих моделей
Рассмотрим одномерную задачу условной глобальной оптимизации: найти минимум одномерной мультимодальной функции f(x), определенной в замкнутой области допустимых значений D = [a;b] (4.1).
Алгоритм метода аппроксимирующих моделей:
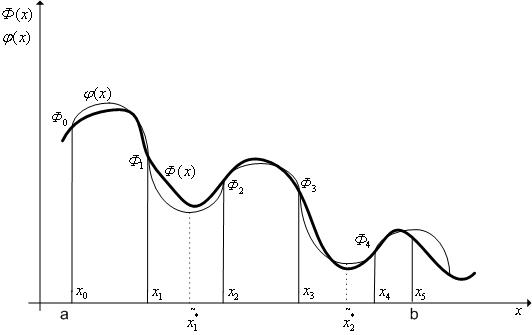
Рис. 4.4. Алгоритм метода аппроксимирующих моделей. N = 5
Шаг 1. Покрываем интервал [a;b] некоторой сеткой с узлами ![]() и
производим испытания в точках
и
производим испытания в точках ![]() , т.е. вычисляем
значения функции f(x)
в этих точках
, т.е. вычисляем
значения функции f(x)
в этих точках ![]() .
.
Шаг 2. Строим аппроксимирующую функцию ![]() ,
проходящую через точки
,
проходящую через точки ![]() . Эту функцию
принято называть математической моделью минимизируемой функции f(x) или модельной
функцией.
. Эту функцию
принято называть математической моделью минимизируемой функции f(x) или модельной
функцией.
Шаг 3. Оцениваем адекватность построенной модели ![]() .
Для этого:
.
Для этого:
производим дополнительные испытания функции f(x) в некоторых точках![]() ;
;
вычисляем значения модельной функции ![]() и
функции f(x) в
этих точках
и
функции f(x) в
этих точках ![]() ;
;
вычисляем погрешность аппроксимации, например, ![]() .
.
Шаг 4. Если погрешность аппроксимации превышает заданную, то по
результатам всех предшествующих испытаний строим новую модельную функцию ![]() и переходим к шагу 3.
и переходим к шагу 3.
Шаг 5. Определяем положение глобального минимума модельной функции ![]() , который или принимается в
качестве глобального минимума функции f(x), или уточняется с помощью какого-либо метода локальной
оптимизации.
, который или принимается в
качестве глобального минимума функции f(x), или уточняется с помощью какого-либо метода локальной
оптимизации.
На
рис. 4.4 ![]() – точки локального минимума
модельной функции
– точки локального минимума
модельной функции ![]() ; точка
; точка ![]() – приближенное значение точки
глобального минимума функции f(x) на интервале [a;b].
– приближенное значение точки
глобального минимума функции f(x) на интервале [a;b].
В качестве модельных функций ![]() чаще всего
используют полиномы и сплайны.
чаще всего
используют полиномы и сплайны.
Рассмотрим использование в качестве модельной функции полиномов.
Аппроксимирующий полином Лагранжа
Будем искать аппроксимирующий полином в виде
 (4.2)
(4.2)
где ![]() – неизвестные полиномы от х,
независящие от аппроксимируемой функции
– неизвестные полиномы от х,
независящие от аппроксимируемой функции ![]() .
.
Из того условия, что модельная функция ![]() должна
совпадать с аппроксимируемой функцией f(x) в узлах сетки
должна
совпадать с аппроксимируемой функцией f(x) в узлах сетки ![]() ,
имеем систему из N + 1
равенств:
,
имеем систему из N + 1
равенств:
 (4.3)
(4.3)
Для выполнения равенств (4.3) полиномы ![]() ,
очевидно, должны удовлетворять условиям
,
очевидно, должны удовлетворять условиям
 (4.4)
(4.4)
или, другими
словами, полином ![]() , должен иметь в качестве
корней все числа
, должен иметь в качестве
корней все числа ![]() , кроме числа xj, а при x = xj должен иметь значение, равное единице.
, кроме числа xj, а при x = xj должен иметь значение, равное единице.
Условию (4.4) удовлетворяют только полиномы вида ![]() , где A
– неизвестная константа. Найдем эту константу из условия
, где A
– неизвестная константа. Найдем эту константу из условия ![]() :
:

Таким образом,
 (4.5)
(4.5)
и искомый аппроксимирующий полином определяют выражением
![]() (4.6)
(4.6)
Полином (4.6) называется аппроксимирующим полиномом Лагранжа.
Использование аппроксимирующего полинома Лагранжа (4.6) в качестве
модельной функции идейно очень просто, но обладает существенным недостатком.
Пусть после построения этого полинома на сетке ![]() и
проверке его адекватности выясняется, что погрешность аппроксимации превышает заданную.
Тогда, в соответствии с рассмотренным выше алгоритмом метода, необходимо
построить новый полином Лагранжа на сетке, полученной объединением сеток
и
проверке его адекватности выясняется, что погрешность аппроксимации превышает заданную.
Тогда, в соответствии с рассмотренным выше алгоритмом метода, необходимо
построить новый полином Лагранжа на сетке, полученной объединением сеток ![]() ,
, ![]() ,
что требует пересчета всех посчитанных ранее функций
,
что требует пересчета всех посчитанных ранее функций ![]() . От этого недостатка свободна
модификация аппроксимирующего полинома Лагранжа – аппроксимирующий полином
Ньютона.
. От этого недостатка свободна
модификация аппроксимирующего полинома Лагранжа – аппроксимирующий полином
Ньютона.
После построения аппроксимирующего полинома возникает задача нахождения
стационарных точек функции ![]() . Поскольку
аппроксимирующий полином непрерывен и, по крайней мере, один раз непрерывно
дифференцируем, его стационарные точки удобно искать как нули первой
производной – т.е. как корни уравнения
. Поскольку
аппроксимирующий полином непрерывен и, по крайней мере, один раз непрерывно
дифференцируем, его стационарные точки удобно искать как нули первой
производной – т.е. как корни уравнения
![]()

![Шаг 7. Если интервал [ a ; b ] исчерпан, переходим шагу 8, иначе полагаем и переходим к шагу 4](https://fs.znanio.ru/d5af0e/da/96/f35e743feb836d660463c11805cc007ea2.jpg)

Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.