Государственное автономное учреждение Калининградской области
профессиональная образовательная организация
«Колледж сервиса и туризма»
НАУЧНО-ИССЛЕДОВАТЕЛЬСКАЯ КОНФЕРЕНЦИЯ
СТУДЕНТОВ ГАУ КО ПОО КСТ
«ЗНАНИЕ – ПОИСК - ТВОРЧЕСТВО»
НАУЧНО-ИССЛЕДОВАТЕЛЬСКАЯ РАБОТА
«Чудо техники-
роботизированная
рука» Выполнили студенты группы ТП1116
Степанов Иоанн Алексеевич
Атамян Никита Олегович
Руководитель: Литвиненко И.В.,
преподаватель физики
Калининград
2017
ЦЕЛЬ: Изучить основы робототехники. Изготовить
роботизированную руку для расширения своих творческих способностей.
ЗАДАЧИ:
1. Рассмотреть основные правила построения робототехники.
2. Построение алгоритмов работы пальцев руки робота.
3. При помощи 3D принтера изготовить детали предплечья и
кисти руки робота.
4. Собрать руку робота.
5. Приобрести навыки программирования микроконтроллера и
управления жестами пальцев руки.
6. Определить области практического применения полученных
знаний.
Основные правила построения
робототехники
Основой проекта стал робот InMoov.
Печать руки
Производим печать деталей
руки робота на 3D принтере.
Каждая деталь печатается и
после печати производится
подгонка деталей и примерка.
Каждая деталь, должна точно
подходить к другой детали.
Сборка руки
После того, как все детали обработаны и примерены, собираем руку,
соблюдая последовательность сборки и аккуратность.
Подключение электроники
После сборки руки, устанавливаем исполнительные механизмы.
Сервоприводы.
Подключение электроники
И контроллер управления сервоприводами.
Подключение электроники
Контроллер подает управляющий сигнал на сервоприводы,
при помощи тяг (плетеная леска), сгибают и разгибают пальцы,
а так же создают необходимое усилие на удержание пальцами
которые,
предметов.
Программирование электроники
Самая ответственная часть работы, это
программирование микроконтроллера. Для
программирования использовалась распространённая и
бесплатная утилита - Arduino ID.
Настройка и управление
После прошивки микроконтроллера, переходим к настройке
управления. Программой управления служит программная
программы
платформа
Myrobotlab-gui 1.0.1758.
Конечный результат
После настройки программы управления, проверяем работу руки.
На фото продемонстрированно, как рука держит кружку.
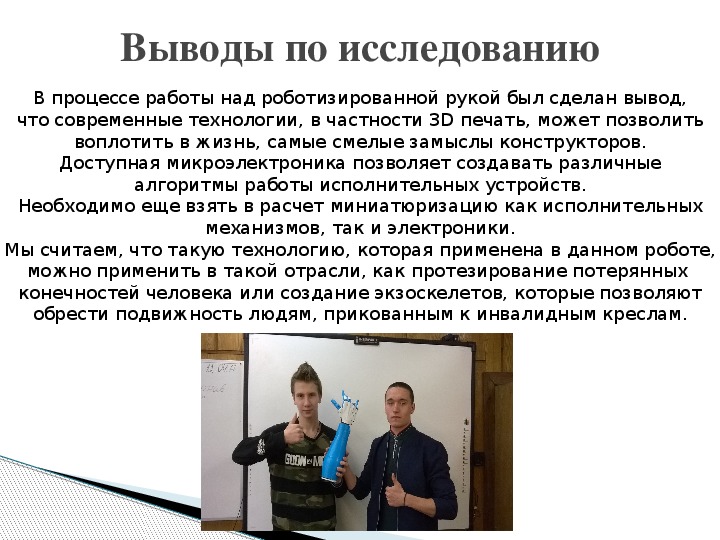
Выводы по исследованию
В процессе работы над роботизированной рукой был сделан вывод,
что современные технологии, в частности 3D печать, может позволить
воплотить в жизнь, самые смелые замыслы конструкторов.
Доступная микроэлектроника позволяет создавать различные
алгоритмы работы исполнительных устройств.
Необходимо еще взять в расчет миниатюризацию как исполнительных
механизмов, так и электроники.
Мы считаем, что такую технологию, которая применена в данном роботе,
можно применить в такой отрасли, как протезирование потерянных
конечностей человека или создание экзоскелетов, которые позволяют
обрести подвижность людям, прикованным к инвалидным креслам.
Изготовление накладки на руку
на 3Д принтере