Поделиться

Обеспечение надежности в системе ПАЗ
Основная проблема обеспечения надежности заключается в выборе системы резервирования ПАЗ. Основываясь на принятых правилах (ПБ 09-170-97) и требованиях ГОСТ 24.104-85, часто предлагается реализовать систему ПАЗ с резервированием процессорного модуля. Недостатки резервирования процессорного модуля состоят в следующем:
· не все современные промышленные контроллеры имеют возможность построения многопроцессорной архитектуры. Широко известный вариант это контроллеры с шиной VME. Но это достаточно дорогие контроллеры;
· отказоустойчивая система предполагает своевременное выявление, предупреждение аварийной ситуации и обеспечение замены неисправного элемента системы без прерывания технологического процесса. Это не обеспечивается резервированием процессорного модуля;
· при выходе из строя источника питания контроллера система ПАЗ неработоспособна;
· при выходе из строя арбитра (он необходим в многопроцессорной системе) система ПАЗ не работоспособна;
· в системах с высокоскоростными параллельными шинами данных, адреса и управления, где возможно построение двухпроцессорной архитектуры, часто происходят непредвиденные отказы с невозможностью продолжения процесса. Необходим общий сброс или переключение питания контроллера и перезагрузка программы контроллера, а это недопустимо для системы ПАЗ;
· при выходе из строя основного процессора резервный может не подхватить процесс (безударное переключение), ввиду возникновения конфликтной ситуации на шине (зависание);
· на процессорный модуль приходится значительная доля стоимости всего контроллера (более 50%).
Поэтому высокая надежность системы ПАЗ предполагает резервирование всех составных частей контроллерного оборудования, а именно:
· резервирование процессора;
· резервирование локальной шины обмена ПЦ-УСО;
· резервирование крейта;
· резервирование источника питания (ИП) контроллера;
· резервирование коммуникационных интерфейсов.
А это выливается в дублирование контроллера. Такая система ПАЗ обеспечивает 100-процентное «горячее» резервирование.
Высокая реактивность системы ПАЗ реализуется с помощью двух методов. Первый метод основан на применении высокоскоростных дискретных модулей УСО. Приложение контроллера работает с прерываниями, при этом в памяти контроллера формируется кольцевой буфер (FIFO), объем которой зависит от времени сохранения архивного тренда. Недостатком данного метода является необходимость хранения предысторий аварийного события в памяти контроллера, которая не рассчитана на хранение аварийных трендов.
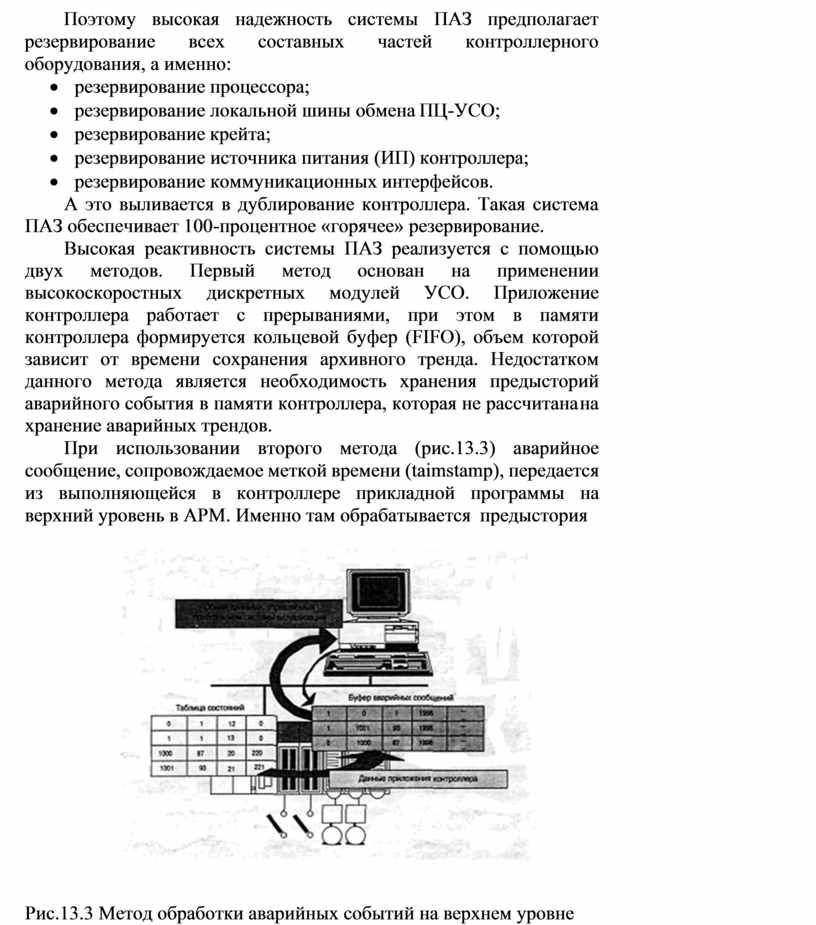
При использовании второго метода (рис.13.3) аварийное сообщение, сопровождаемое меткой времени (taimstamp), передается из выполняющейся в контроллере прикладной программы на верхний уровень в АРМ. Именно там обрабатывается предыстория
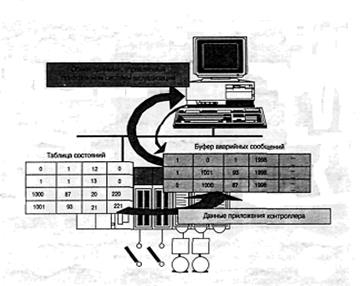
Рис.13.3 Метод обработки аварийных событий на верхнем уровне
события и хранится аварийный тренд (на жестком диске). Память контроллера используется для формирования таблиц и буфера аварийных сообщений, но при этом не требуется большого объема памяти буфера. Транзакции происходят с высокой скоростью, на порядок выше традиционного обмена между приложением и системой SCADA. Данный метод не требует применения высокоскоростных контроллеров и модулей УСО, а также специальной области памяти для хранения временного массива аварийного события.
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.