

Повышение эффективности приготовления кормосмеси крупному рогатому скоту путем разработки энергосберегающих технологий и средств механизации
3
Введение
Актуальность темы. Одной из наиболее актуальных проблем современноrо аг рарного производства в РФ является обеспечение населения в достаточном количестве качественными продуктами животноводства. В целях успешного удовлетворения рас тущих потребностей в мясомолочных продуктах необходимо развивать скотоводство, что, в свою очередь, напрямую связано с созданием прочной кормовой базы. Рацио нальное использование .кормов предусматривает их скармливание животным только в подготовленном виде, а также в смеси с другими компонентами и при высоком качест ве приготовления.
Применение кормосмесей позволяет расширить использование растительных от ходов, повысить поедаемость и переваримость кормов, на 10... 26% увеличить продук тивность животных и на 15... 20% снизить расход кормов на единицу продукции. Важ ную роль в технологических процессах приготовления кормосмесей иrрает операция смешивание, результаты которой сказываются на продуктивности животных. Эта опе рация требует затрат энерпш, которые относятся на себестоимость корма. Однако су ществующие смесители, часто не соответствуют зоотехническим требованиям, мало производительны и не всегда обеспечивают получения смеси требуемого качества. Оп тимизация констру1,.--гивно-режимных параметров рабочих органов таких машин явля ется актуальной задачей. В связи с этим совершенствование смесителей кормов, их ра бочих органов, направленное на повышение пропускной способности машин, сниже ние энергоемкости процесса смешивания, улучшение качества кормосмеси является актуальной народно-хозяйственной задачей.
Цель работы - повышение эффективности приготовления кормосмесей крупному рогатому скоту путем разработки энеµгосбереrающих технологий и средств механиза ции.
Объект исследований - технологический процесс смешивания кормов, экспери ментальный шнековый смеситель-раздатчик кормов, его рабочие органы, компоненты кормов и кормосмесь.
Методы исследования. Достижение поставленной цели осуществлялось теорети ческими и экспериментальными исследованиями. Теоретическое исследование посвя щено получению зависимостей, позволяющих установить конструктивные и техноло гические параметры смесителя-раздатчика кормов и его рабочих органов. Основные результаты выполненной работы получены с использованием как стандартных, так и частных методик экспериментальных исследований физико-механических характери стик и свойств компонентов смесей и процесса смешивания этих компонентов в шне ковом смесителе. При обработке результатов эксперимента использованы методы ма тематической статистики с применением ПК.
Достоверность результатов, полученных в ходе исследований, обеспечена ис пользованием современных приборов, технологического оборудования, компьютерной техники, а также достаточным количеством экспериментов и проверкой результатов исследований на макетном образце смесителя-раздатчика в условиях производства на фермах трех хозяйств.
Научная новизна. Предложена математическая модель движения смеси в смеси телях шнекового типа, учитывающая конструктивные особенности рабочих органов и режимы работы.
4
Обоснованы элементы конструкции нижнего выгрузного шнека и форма лопа стей-ножей шнеков. Предложен алгоритм построения конrура лопасти-ножа смесите ля.
Установлены минимальные значения мощности на приводе, удельной энергоем кости, неоднородности смеси в зависимости от внешних факторов. Новизна предло женных технических решений подтверждена двумя патентами на изобретение «Ло пасть-нож смесителя» и «Раздатчик-измельчитель грубых кормов рулонной заrотов кш>.
Практическая значимость результатов исследования:
1. Предложена конструктивно-технологическая схема измельчителя-смесителя раздатчика шнекового типа.
2. Разработан и изготовлен шнековый измельчитель-смеситель с оригинальными лопастями-ножами.
3. Определены основные параметры измельчителя-смесителя, позволяющие по высить качество измельчения и смешивания кормовых компонентов смеси при одно временном снижении энергоемкости процесса приготовления и раздачи кормовой сме си.
Новизна технических решений подтверждена 2 патентами РФ на изобретение и двумя патентами на полезную модель.
4. Предлагаемая технология и разработанный смеситель-раздатчик кормовых смесей испытаны в производственных условиях в СХА «Кубань» и ООО «Волна» При кубанского района КЧР, а также в ООО «Заветное» Георгиевского района Стасрополь скоrо края; результаты одобрены и приняты к реализации.
Основные положения, выносимые на защиту:
1. Конструктивно-технологическая схема смесителя-раздатчика кормов;
2. Теоретические основы обоснования технических средств для смешивания кор
мов;
3. Математические модели смешивания кормов в объемных смесителях шнеково
го типа;
4. Обоснование конструктивных и режимных параметров рабочих органов сме сителя.
5. Критерий оценки смесителей-раздатчиков различных типов.
6. Закономерности процесса смешивания, отражающие связь между технологиче скими факторами, физико-механическими свойствами кормов и энергоемкостью про цесса смешивания.
Апробация работы.
Основные результаты исследования были доложены и одобрены на научно технических конференциях по вопросам современных технологий и технологических средств в Ставропольском ГАУ, Карачаево-Черкесской ПА, Кабардино-Балкарской ГСХА, Донской ГАУ, Брянской ГСХА и Санкт-ПетербургскойГАУ.
Публикация. По теме диссертации опубликованы 13 работ, в том числе 3 в изда ниях, рекомендованных ВАК, 2 патента РФ на изобретение, 2 патента на полезную мо дель.
5
Структура и объем диссертации.
Диссертация состоит из введения, 5 разделов, общих выводов, списка литературы из 224 наименований (в том числе 15 на иностранных языках) и приложений. Она включает 35 таблиц, 54 рисунка и 25 приложений.
СОДЕРЖАНИЕ ДИССЕРТАЦИИ
Во введении кратко обоснована актуальность темы диссертации и сформулиро вана цель исследования, а таюке приведены основные положения диссертации, выно симые на защиту.
В первом разделе «Состояние вопроса и задачи научного исследования» пред ставлены технологические предпосылки и особенносш приготовления кормосмесей на фермах крупного рогатого скота, характеристика кормов и зоотехнические требования, анализ технологий, классификация и анализ конструкций смесителей кормов. Приво дится обзор результатов исследований приготовления кормов в шнековых смесителях.
Теоретические основы совершенствования процесса смешивания, а также разра ботки средств механизации приготовления кормосмесей изложены в работах А.М. Гри горьева, Р.Л. Зенкова, А.А. Лапшина, П.К. Жевлакова, Г.М. Кукты, Ф.К. Новобранцева, Ф.Г. Стукалина, А.Ш. Финкельштейна, С.В. Мельникова, Б.И. Вагина и многих других ученых. Доказано, что наиболее перспективными устройствами по смешиванию кор мов дЛЯ крупного рогатого скота являются шнековые смесители. Обзор результатов ис следований процесса смешивания кормов показал необходимость дальнейшего совер шенствования технологий и средств механизапии в направлении повышения качества продукrа и снижения энергоемкости.
В результате сформулированы цель и задачи исследований: 1) выявить влияние основных физико-механических свойств кормов на показатели работы смесителя; 2) определить пути снижения энергоемкости работы смесителя кормов; 3) разработать методику технологического проектирования смесителя кормов; 4) создать опытный образец и исследовать рабочий процесс смесителя кормов; 5) определить экономиче скую эффективность от использования предпаrаемоrо смесителя кормов.
Во втором разделе «Теоретические исследования рабочего процесса смесителя раздатчика кормов» представлено обоснование применения смесителя-раздатчика кор мов шнекового типа, а таюке обоснование ero структурной. и технологической схемы, основные технологические показатели работы, теоретическое обоснование конструк тивных и режимных параметров нижнего выгрузного шнека и формы лопасти-ножа. У применяемых на фермах крупного рогатого скота РФ смесителей-раздатчиков типа РСП-10 выявились определенные недостатки: значительные нагрузки в приводе рабо чих органов смесителя (нижнего выгрузного шнека), следствие - большая энергоем кость процесса смешивания кормов.
Результаты исследований Гринберrа В.Л., Куницина Л.А., Гладуна В.Ф., Омель ченко А.А., и Хочуа Ф.А. также свидетельствуют о том, что в трехшнековых смесите лях-раздатчиках кормов значительная часть затрачиваемой в процессе смешивания энергии расходуется нижним выгрузным шнеком на выталкивание массы от днища к верхним шнекам, а при выгрузке - к выгрузному окну.
Анализ литературных источников показывает, что при «движении» к животному корма проходят несколько стадий как во времени, так и в пространстве. Общие зако-
6
номерности перемещения кормов можно представить технологической схемой (рису нок 1).
![]() НАКОПЛЕНИЕ • jOло
НАКОПЛЕНИЕ • jOло
![]() СМЕШИВАНИЕ . !□ЛО
СМЕШИВАНИЕ . !□ЛО
ТРАНСПОРТИРОВАНИЕ .!
..._.,_,,.,
РАЗДАЧА
Рисунок 1 - Технологическая схема при готовления кормосмеси шнековым смесителем-раздатчиком кормов:
![]() В j- грубые корма (сено, солома); сочные корма (силос, сенаж);
В j- грубые корма (сено, солома); сочные корма (силос, сенаж);
6.- корнеплоды;
0- концентрированные корма;
!;- кормовая смесь.
![]()
Модель функционирования шнекового смесителя-раздатчика кормов. Решение задачи совершенствования технологии основывается на системном подходе к исследо ванию и взаимосвязи комплекса процессов в механизированной поточной линии при готовления и раздачи кормосмеси. С позиции системного подхода технологический процесс смешивания компонентов кормов и выдачу готовой кормосмеси можно пред ставить в виде модели детерминированной системы (рисунок 2).
Klt) ;T(t) K(t) T(t) Ув.т.
 W(t) -
W(t) -
W(t)
-
Wк(t}
 QK{t)
QK{t)
-Nкlt)
Эк(t)
Q(t) -
Q(t) -
• • •
-vк{t}
--·-v6Ш
Р! Wн.ш. Wвш. р Wн.ш. Wв.ш
Рисунок 2 - Модель функционирования шнекового смесителя-раздатчика кормов Целостность системы определяется как совокупность объектов: бункера
смесителя (Б-С) и выгрузного транспортера (ВТ). Входы и выходы системы различа ются по материальному, энергетическому и информационному характеру. В данном случае в модели входными воздействиями приняты переменные, определяющие .усло вия работы шнекового смесителя кормов (его производительность Q(t) и влажность кормосмеси W(t)). На входные показатели исследуемых объектов оказывают влияние внешние факторы, такие как состояние кормового сырья K(t), температура окружаю-
7
щей среды T(t) и управляющие воздействия: давление кормового сырья в бункере- сме сителе Р, угловая частота вращения нижнего выгрузного шнека rон_щ_, угловая частота вращения верхних шнеков roa.ш_=ro•. w1.+ (!)8_ш2., ширина и высота выгрузного окна а•.о., в00. и скорость движения выгрузного транспортера V,.т.• Выходными параметрами при нята влажность приготавливаемой кормосмеси W,(t), потребляемая мощность и энер гоемкость процесса приготовления кормосмеси N.(t) и Э.(t), неоднородность кормо смеси u.(t) и неравномерность ее выдачи u.(t). Внутри системы существует определен ная связь между исследуемыми объектами, где выход предыдущего элемента по влаж ности и производительности является входным последующего. Предложенная техноло гия и техническое средство приготовления и раздачи кормосмеси животным защищены nа,ен,ом No2181937 «Лопасть-нож смеси,еля)) и положены в основу последующих ис следований автора.
Теоретическое обоснование конструктивных и режимных параметров рабо чих органов шне1(ового смесителя-раздатчика кормов.
Обоснование конструкции нижнего выгрузного шнека смесителя-раздатчика
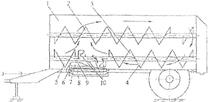
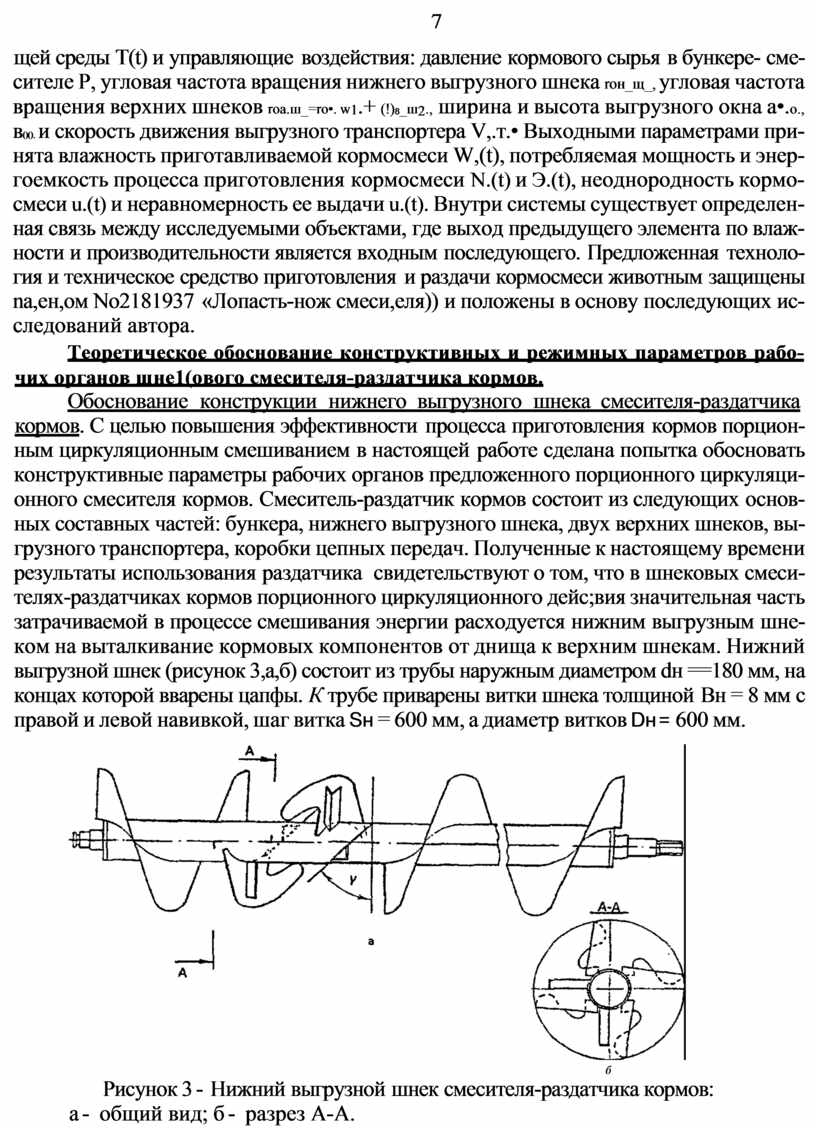
кормов. С целью повышения эффективности процесса приготовления кормов порцион ным циркуляционным смешиванием в настоящей работе сделана попытка обосновать конструктивные параметры рабочих органов предложенного порционного циркуляци онного смесителя кормов. Смеситель-раздатчик кормов состоит из следующих основ ных составных частей: бункера, нижнего выгрузного шнека, двух верхних шнеков, вы грузного транспортера, коробки цепных передач. Полученные к настоящему времени результаты использования раздатчика свидетельствуют о том, что в шнековых смеси телях-раздатчиках кормов порционного циркуляционного дейс;вия значительная часть затрачиваемой в процессе смешивания энергии расходуется нижним выгрузным шне ком на выталкивание кормовых компонентов от днища к верхним шнекам. Нижний выгрузной шнек (рисунок 3,а,б) состоит из трубы наружным диаметром dн ==180 мм, на концах которой вварены цапфы. К трубе приварены витки шнека толщиной Вн = 8 мм с правой и левой навивкой, шаг витка Sн = 600 мм, а диаметр витков Dн = 600 мм.
 |
б
Рисунок 3 - Нижний выгрузной шнек смесителя-раздатчика кормов: а - общий вид; б - разрез А-А.
8
Участок выгрузного шнека, расположенный в зоне выгрузного окна, выполнен с установленными по винтовой линии на его полом валу лопастями-ножами, которые за креплены под углом 40-50° к радиальной плоскости поперечного сечения полого вала. При этом указанный участок выгрузного шнека выполнен длиной, соответствующей 1/5-1/6 длины всего шнека, и расположен от передней стенки бункера на расстоянии, превышающем диаметр витков выгрузного шнека.
Обоснование формы лопасти-ножа шнекового смесителя-раздатчика кормов. Для достижения максимальной однородности смеси, ивтенсифнкации процесса перемеши вания, сокращения зоны смешивания, снижения энергоемкости процесса, потоку час т,щ перемешиваемых компонентов необходимо обеспе•нпь интенсивное перераспре деление.
Исследователями доказано, что при определенных условиях шнековые устройст ва обеспечивают перемешивание кормов. При этом полагают, что вращающийся шнек эквивалентен непрерывной наклонной плоскости, по которой под действием системы сил материал перемещается в постоянном объеме в виде постоянно пересыпающегося тела волочения. Геометрические параметры этого тела зависят от наполнения шнека,
физико-механических свойств материала, параметров шнека и режима работы. Приве денные Григорьевым А.М. наблюдения свидетельствуют о том, что если угол а накло на элементарных площадок, образующих винтовую поверхность, к горизонту будет
примерно равен приведенному углу трения л.смеси о поверхность шнека [а=(О,9-1, 1)л.],
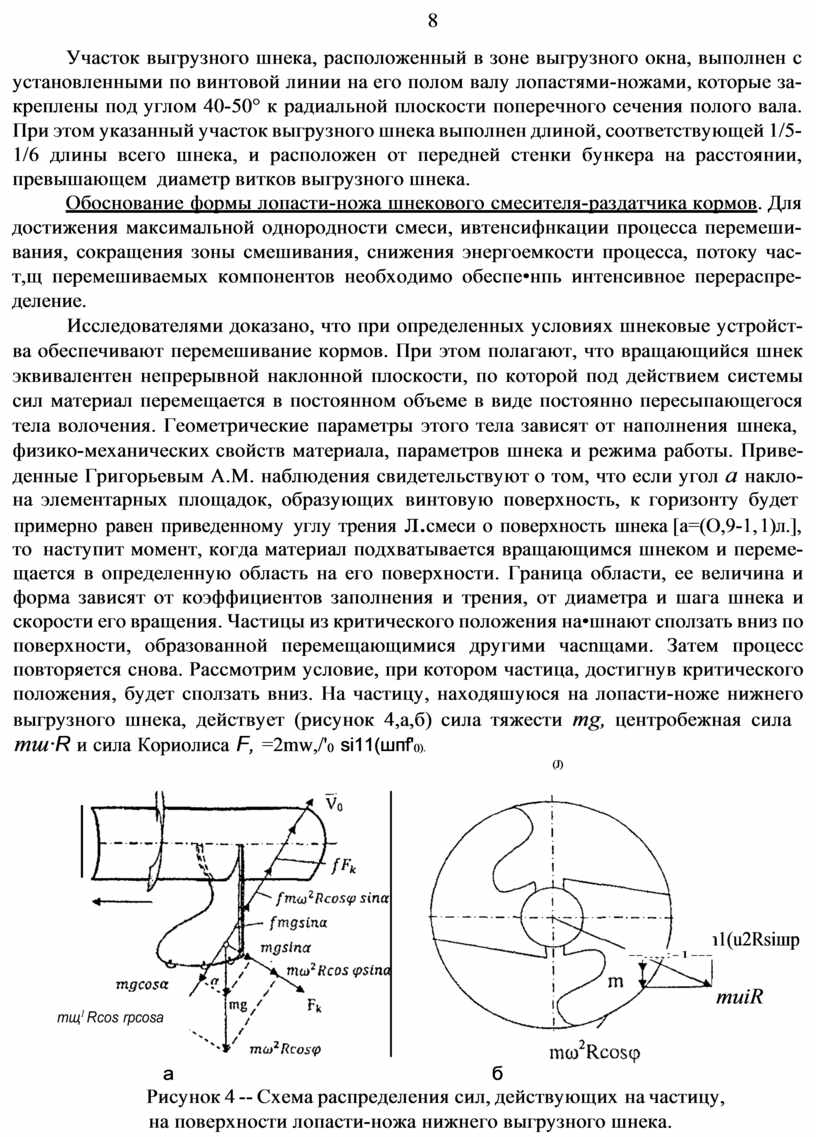
то наступит момент, когда материал подхватывается вращающимся шнеком и переме щается в определенную область на его поверхности. Граница области, ее величина и форма зависят от коэффициентов заполнения и трения, от диаметра и шага шнека и скорости его вращения. Частицы из критического положения на•шнают сползать вниз по поверхности, образованной перемещающимися другими часnщами. Затем процесс повторяется снова. Рассмотрим условие, при котором частица, достигнув критического положения, будет сползать вниз. На частицу, находяшуюся на лопасти-ноже нижнего выгрузного шнека, действует (рисунок 4,а,б) сила тяжести mg, центробежная сила
тш·R и сила Кориолиса F, =2mw,/'0 si11(шпf'0).
![]() (J)
(J)
 n1(u2Rsiшp
n1(u2Rsiшp
muiR
а б
Рисунок 4 -- Схема распределения сил, действующих на частицу, на поверхности лопасти-ножа нижнего выгрузного шнека.
9
Разложим силу тяжести на силу нормального давления на лопасть-нож шнека mg sina и силу, касательную к лопасти-ножу шнека mg cosa, а центробежную силу moiR на силу нормального давления на лопасть-нож шнека moiR cos<p cosa, где q> - угол
подъема частиц (q> = 65... 75°). Сила нормального давления mg si11a. вызывает силу тре
ния/ mg sina, а сила moiR cos<p sina - силу тренияf тсiR cos<p sina. Сила Кориолиса направлена нормально к лопасти-ножу шнека и равна 2mФn V0 sin(Ф0 V0),
где Фп - угловая скорость переносного движения материальной точки;
V0 - относительная скорость материальной точки (скорость скольжения по вин товой поверхности).
В первом приближении примем, что (!)п = (!),
V = _!!_ • arp = _!!_m; sin((!)лVo) == sin(90 - а), тогда сила Кориолиса будет
cosa at cosa
2тоi R и вызовет силу трения 2/ mci R.
Сползание частиц возможно, если:
mg cosa + mciR cosq> cosa f mg sina + f muiR cos<p sina + 2/oiRm , (1)
где m - масса частиц;
@- угловая скорость шнека, 1/с; R - радиус шнека;
f- коэффициент трения (движения) в слоях перемешиваемых частиц;
а -уrол подъема винтовой линии.
Максимально допустимая скорость вращения шнека:
![]()
сотах= g sin а - cos а
R(cos rp cos а - f cos \Р sin а - 2f)
(2)
Производительность шнекового смесителя периодического действия описывает ся уравнением (3):
D2-d'
кr/с,
(3)
Q = 1r--
2
-йJSYl/f,
rде D - наружный диаметр шнека, мм; d - диаметр вала шнека, мм;
у - плотность корма, кr/см3;
\j1 - коэффициент производительности.
Коэффициент производительности \JI показывает величину той части объема ма териала, которая движется к зоне разгрузки с каждым оборотом шнеков с лопастями ножами и которая определяет истинную производительность устройства. Коэффициент производительности \Jf зависит от формы частиц, коэффициента трения материала о поверхность лопастей-ножей шнека и бункера раздатчика-смесителя кормов; от угла естественного откоса, от параметров шнека, количества шнеков и режима работы. Ве личина коэффициента производительности определяется экспериментально.
Известно, что
S = 1tD tg а, мм;
d = (0,2... 0,25)D, мм.
(4)
(5)
10
Подставляя в уравнение (3) значение соответствующих параметров из выраже ния(2), (4) и (5) и решая относительно D, имеем
 D= (6)
D= (6)
Щ>Лученные уравнения (2) и (6) позволяют определить по заданной производи тельности шнекового смесителя кормов основные параметры шнековых рабочих орга нов и режим их работы, при которых достигается максимальная однородность смеси, сокращается зона смешивания, снижаются энергоемкость и металлоемкость процесса.
Для смесителя с несколькими шнеками
![]()
где n - количество шнеков.
(7)
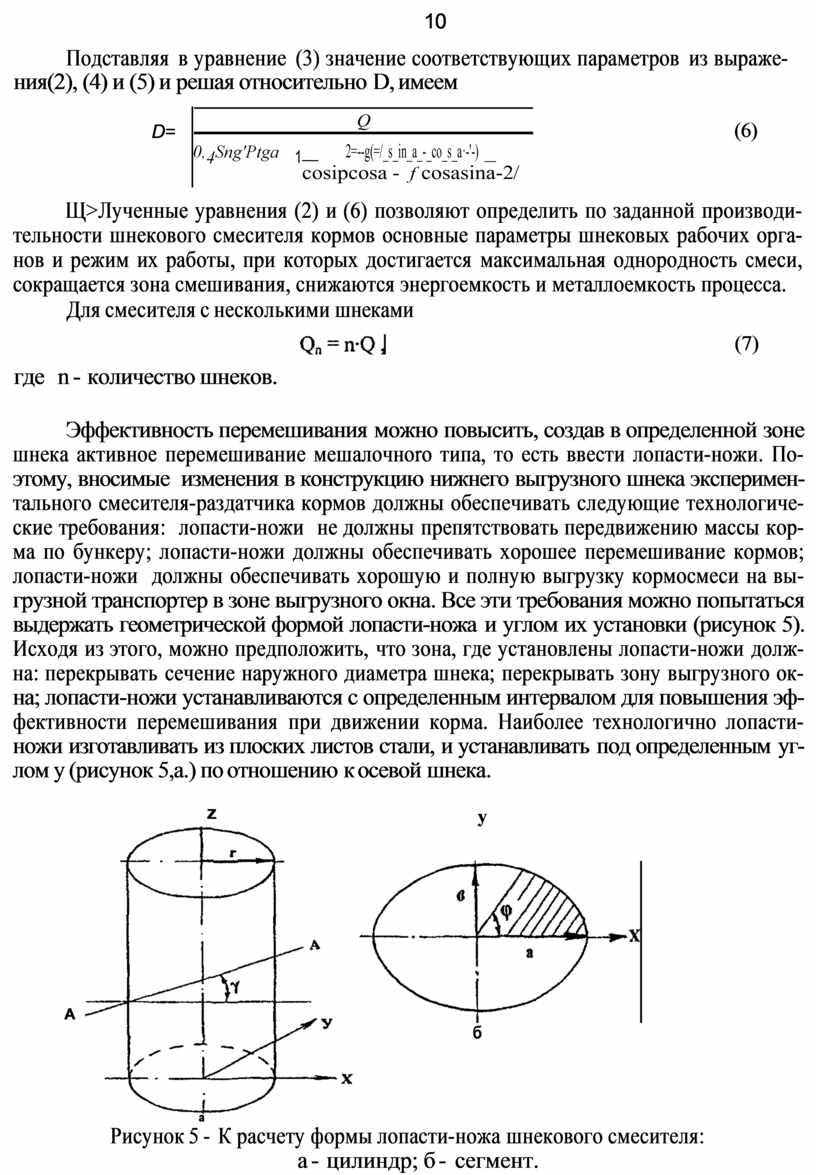
Эффективность перемешивания можно повысить, создав в определенной зоне шнека активное перемешивание мешалочноrо типа, то есть ввести лопасти-ножи. По этому, вносимые изменения в конструкцию нижнего выгрузного шнека эксперимен тального смесителя-раздатчика кормов должны обеспечивать следующие технологиче ские требования: лопасти-ножи не должны препятствовать передвижению массы кор ма по бункеру; лопасти-ножи должны обеспечивать хорошее перемешивание кормов; лопасти-ножи должны обеспечивать хорошую и полную выгрузку кормосмеси на вы грузной транспортер в зоне выгрузного окна. Все эти требования можно попытаться выдержать геометрической формой лопасти-ножа и углом их установки (рисунок 5). Исходя из этого, можно предположить, что зона, где установлены лопасти-ножи долж на: перекрывать сечение наружного диаметра шнека; перекрывать зону выгрузного ок на; лопасти-ножи устанавливаются с определенным интервалом для повышения эф фективности перемешивания при движении корма. Наиболее технологично лопасти ножи изготавливать из плоских листов стали, и устанавливать под определенным уг лом у (рисунок 5,а.) по отношению к осевой шнека.
 z у
z у
А
а
Рисунок 5 - К расчету формы лопасти-ножа шнекового смесителя: а - цилиндр; б - сегмент.
11
Тогда, из условия перекрытия сечения наружного диаметра шнека, лопасти-ножи должны представлять сегменты эллипса. с размерами, зависящими от их количества (рисунок 5, б).
, Уравнение эллипса {x=aco.srp
y=вsmrp
(8)
Поскольку, лопасти устанавливают в зоне выгрузного окна, в качестве исходных данных для определения формы лопастей будем принимать: L - длина выгрузного ок на, мм; r - наружный радиус витков шнека, мм; n - количество лопастей-ножей, шт.
В простейшем случае форма лопасти-ножа будет представлять площадку ограни- ченную линиями:
 у=О
у=О
y=tgrp • x
х =acosrp
{ y=вsmrp
Полагаем в= r, тогда а= _r_ .
cosr
Условие перекрытия лопастями-ножами зоны выгрузного окна:
L=n·l1
где L - длина нижнего выгрузного шнека, мм;
11- проекция лопасти-ножа на ось шнека,
r
-=tgr.
/1
(9)
(10)
(11)
Условие перекрытия сечения наружного диаметра шнека лопастями-ножами:
П(j)о == 21t (12)
Соотношения (9-12) являются исходными уравнениями для оптимизации формы лопасти-ножа.
Как правило, в перемешивающих устройствах с прямыми лопастями, угол их ус тановки составляет у == 45°.
Тогда расчетная зона выгрузного окна
L=n • r
![]() Расчетный угол сегмента:
Расчетный угол сегмента:
(13)
Экспериментальными исследованиями установлено, что из-за различия свойств в кормосмеси оптимальная форма лопасти-ножа отличается от традиционой.
Проr:рамма алгоритма построения линий контура лопасти-ножа шнекового сме сителя-раздатчика кормов. Программа «fline.exe» реализует алгоритм построения ли ний контура лопасти-ножа, которая может применяться в механизмах для смешивания сыпучих или вязких веществ. В его основе используется уравнение линии в полярных координатах:
12
\r-r0\" +\![_= 1
d" (f)o '
где ro = (r1 + r2)/2 , d == (r1- r2)/2
(14)
r1, r2 - внешний и внуrренний радиусы;
<ро -угол сектора, содержащего контур половины лопасти.
Параметр n 1 определяет форму линии.
В частном случае n=2 линия (1) представляет собой эллипс, деформированный путем замены прямоугольных координат в его каноническом уравнении:
2 2
на полярные r и q,,
-=--+ =1
al Ь2
(15)
(r - r0)/d = х/а, q,/q>o= у/Ь,
что и приводит к уравнению (14).
(16)
Программа выводит контур в координатах r и q,, при этом r измеряется в относи тельных единицах (где внешний радиус r1 принят равным 100), а полярный угол q> - в градусах. Значения параметра n могут варьироваться в диапазоне от 1 до 4.
В третьем разделе «Программа и методика экспериментальных исследований» представлены программа и задачи экспериментальных исследований смесителя раздатчика кормов, описаны технические средства, оборудование, приборы и методика проведения экспериментальных исследований.
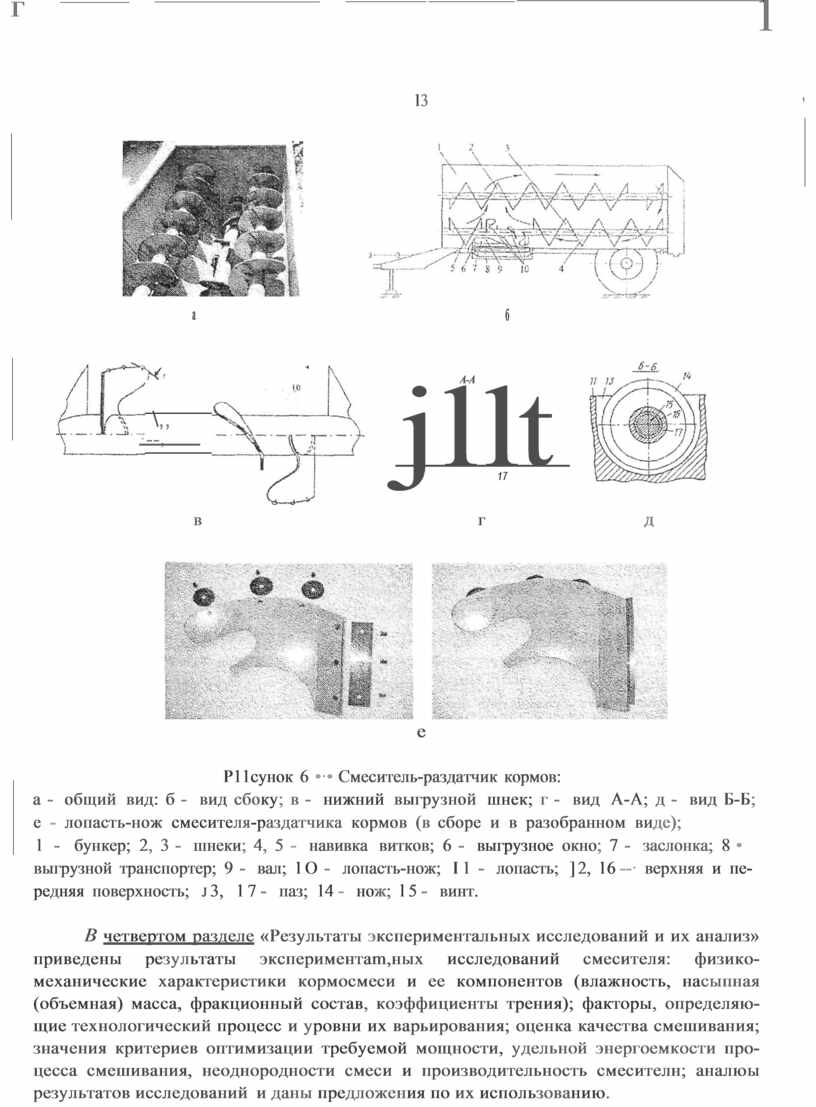
Экспериментальные исследования включают методики: планирования и поста новки опытов; исследования физико-механических свойств компонентов кормов и кормосмеси: влажность, насыпная (объемная) масса, фракционный состав, коэффици ентов трения; факторы, определяющие технологический процесс и уровни их варьиро вания; оценки качества смешивания; определения требуемой мощности и удельной энергоемкости процесса смешивания. Опыты проводились на экспериментальном сме сителе кормов (рисунок 6).
В соответствии с поставленной задачей экспериментальные исследования вы полняли по следующей программе:
1) определение конструктивных особенностей нижнего выгрузного шнека смеси теля-раздатчика кормов, обеспечивающего приготовление качественной кормосмеси с минимальным расходом энергии;
2) исследование качественных и энергетических показателей процесса смешива ния при разных режимах загрузки компонентов кормов и работы смесителя;
3) проведение экспериментальных исследований с целью оптимизации основных параметров и режимов работы смесителя кормов для приготовления кормосмеси круп ному рогатому скоту.
Лопасть имеет особую поверхность с углом перегиба 30-35° в передней своей части, причем направление изгиба криволинейного участка лопасти-ножа совпадает с направлением ее перегиба, на ее верхней поверхности выполнены пазы. В пазах уста новлены дисковые ножи, закрепленные посредством винтов.
![]()
![]()
![]() г 1
г 1
![]()
![]() 13 1
13 1
 |
 |
а б

![]()
![]()
![]() jll17 t
jll17 t
в г д
 |
 |
||
е
![]() Р11сунок
6 •·• Смеситель-раздатчик кормов:
Р11сунок
6 •·• Смеситель-раздатчик кормов:
а - общий вид: б - вид сбоку; в - нижний выгрузной шнек; г - вид А-А; д - вид Б-Б; е - лопасть-нож смесителя-раздатчика кормов (в сборе и в разобранном виде);
1 - бункер; 2, 3 - шнеки; 4, 5 - навивка витков; 6 - выгрузное окно; 7 - заслонка; 8 • выгрузной транспортер; 9 - вал; 1 О - лопасть-нож; I 1 - лопасть; ] 2, 16 --· верхняя и пе редняя поверхность; J 3, 1 7 - паз; 14 - нож; l 5 - винт.
В четвертом разделе «Результаты экспериментальных исследований и их анализ» приведены результаты экспериментаm,ных исследований смесителя: физико механические характеристики кормосмеси и ее компонентов (влажность, насыпная (объемная) масса, фракционный состав, коэффициенты трения); факторы, определяю щие технологический процесс и уровни их варьирования; оценка качества смешивания; значения критериев оптимизации требуемой мощности, удельной энергоемкости про цесса смешивания, неоднородности смеси и производительность смесителн; аналюы результатов исследований и даны предложения по их использованию.
![]() 14
14
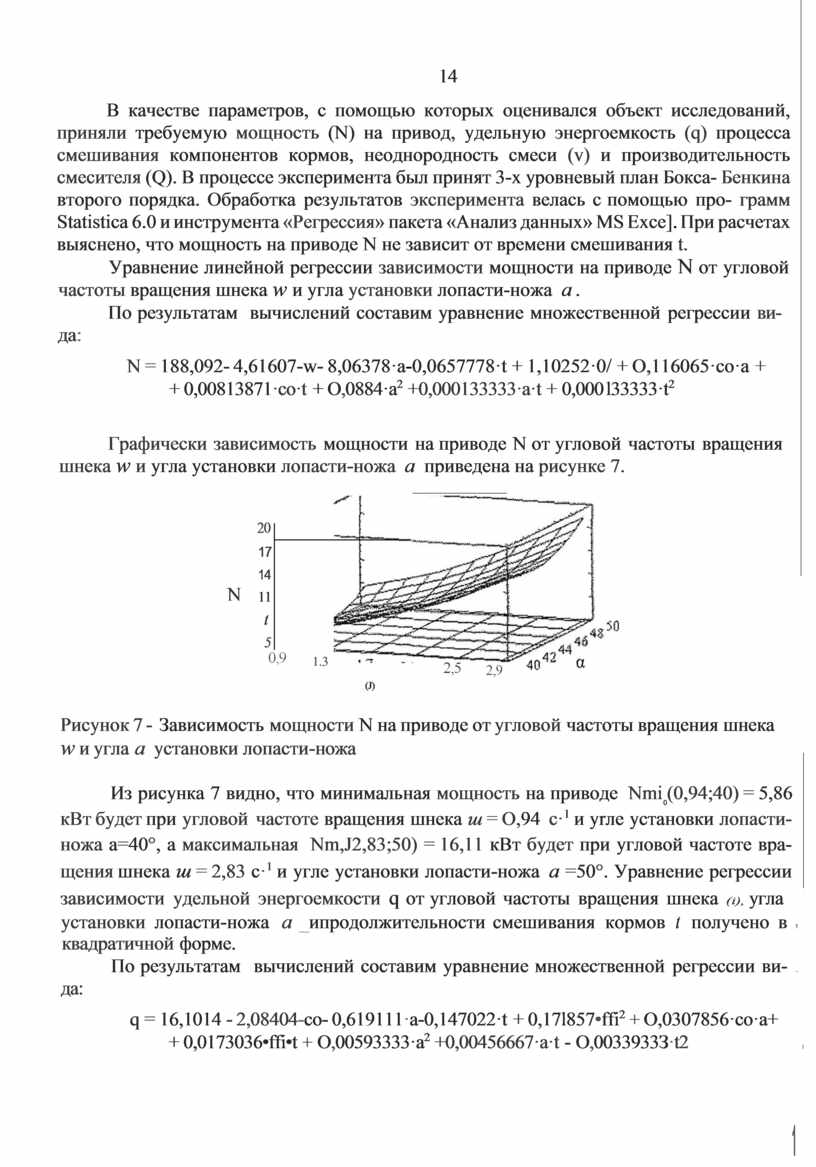
В качестве параметров, с помощью которых оценивался объект исследований, приняли требуемую мощность (N) на привод, удельную энергоемкость (q) процесса смешивания компонентов кормов, неоднородность смеси (v) и производительность смесителя (Q). В процессе эксперимента был принят 3-х уровневый план Бокса Бенкина второго порядка. Обработка результатов эксперимента велась с помощью про грамм Statistica 6.0 и инструмента «Регрессия» пакета «Анализ данных» MS Ехсе]. При расчетах выяснено, что мощность на приводе N не зависит от времени смешивания t.
Уравнение линейной регрессии зависимости мощности на приводе N от угловой частоты вращения шнека w и угла установки лопасти-ножа а .
По результатам вычислений составим уравнение множественной регрессии ви
да:
N = 188,092- 4,61607-w- 8,06378·a-0,0657778·t + 1,10252·0/ + О,116065·со·а +
+ 0,00813871·co·t + О,0884·а2 +0,000133333·a·t + 0,000 l33333·t2
 Графически зависимость мощности на
приводе N от угловой частоты вращения
шнека w и угла установки лопасти-ножа а приведена на рисунке 7.
Графически зависимость мощности на
приводе N от угловой частоты вращения
шнека w и угла установки лопасти-ножа а приведена на рисунке 7.
20
17
14
N 11
t
5
(J)
Рисунок 7 - Зависимость мощности N на приводе от угловой частоты вращения шнека
![]() w и угла а установки лопасти-ножа
w и угла а установки лопасти-ножа
![]() Из рисунка 7 видно, что минимальная мощность на приводе
Nmi (0,94;40)
= 5,86 кВт будет при угловой частоте
вращения
шнека ш = О,94 с·1
и уrле установки лопасти ножа а=40°, а максимальная Nm,J2,83;50) = 16,11
кВт будет при угловой частоте вра щения шнека ш = 2,83 с·1 и угле установки
лопасти-ножа а =50°. Уравнение регрессии зависимости удельной
энергоемкости q от угловой частоты
вращения шнека (i), угла
Из рисунка 7 видно, что минимальная мощность на приводе
Nmi (0,94;40)
= 5,86 кВт будет при угловой частоте
вращения
шнека ш = О,94 с·1
и уrле установки лопасти ножа а=40°, а максимальная Nm,J2,83;50) = 16,11
кВт будет при угловой частоте вра щения шнека ш = 2,83 с·1 и угле установки
лопасти-ножа а =50°. Уравнение регрессии зависимости удельной
энергоемкости q от угловой частоты
вращения шнека (i), угла
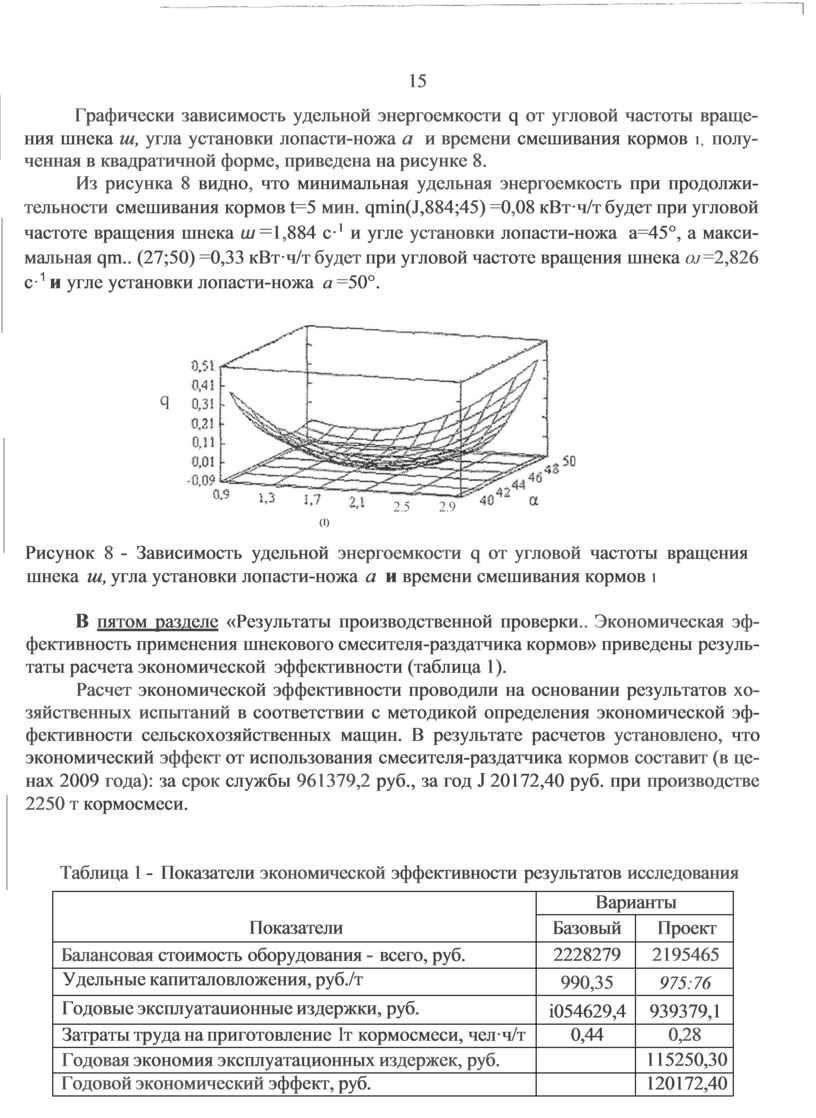
установки лопасти-ножа а _ипродолжительности смешивания кормов t получено в 1
квадратичной форме.
По результатам вычислений составим уравнение множественной регрессии ви- 1
да:
q = 16,1014 - 2,08404-со- 0,619111·а-0,147022·t + 0,17l857•ffi2 + О,0307856·со·а+
![]() + 0,0173036•ffi•t + О,00593333·а2 +0,00456667·a·t - О,0033933З·t2
+ 0,0173036•ffi•t + О,00593333·а2 +0,00456667·a·t - О,0033933З·t2
1
![]()
![]()
15
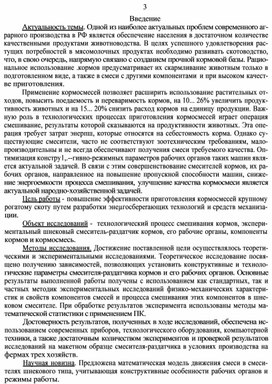
Графически зависимость удельной энергоемкости q от угловой частоты враще ния шнека ш, угла установки лопасти-ножа а и времени смешивания кормов 1, полу ченная в квадратичной форме, приведена на рисунке 8.
![]() Из рисунка 8 видно, что минимальная удельная энергоемкость при продолжи тельности смешивания кормов t=5 мин. qmin(J,884;45) =0,08 кВт·ч/т будет при угловой частоте вращения шнека ш =1,884 с·1 и
угле установки
лопасти-ножа а=45°, а макси мальная qm.. (27;50) =0,33 кВт·ч/т будет при угловой
частоте вращения шнека OJ =2,826 с·1 и угле установки лопасти-ножа а =50°.
Из рисунка 8 видно, что минимальная удельная энергоемкость при продолжи тельности смешивания кормов t=5 мин. qmin(J,884;45) =0,08 кВт·ч/т будет при угловой частоте вращения шнека ш =1,884 с·1 и
угле установки
лопасти-ножа а=45°, а макси мальная qm.. (27;50) =0,33 кВт·ч/т будет при угловой
частоте вращения шнека OJ =2,826 с·1 и угле установки лопасти-ножа а =50°.
 |
(1)
![]() Рисунок 8 - Зависимость удельной энергоемкости q от угловой частоты вращения шнека ш, угла установки лопасти-ножа а и времени смешивания кормов 1
Рисунок 8 - Зависимость удельной энергоемкости q от угловой частоты вращения шнека ш, угла установки лопасти-ножа а и времени смешивания кормов 1
В пятом разделе «Результаты производственной проверки.. Экономическая эф фективность применения шнекового смесителя-раздатчика кормов» приведены резуль таты расчета экономической эффективности (таблица 1).
![]() Расчет экономической
эффективности проводили на основании результатов хо зяйственных испытаний в соответствии с
методикой определения экономической эф фективности сельскохозяйственных мащин.
В результате расчетов установлено,
что экономический эффект
от использования смесителя-раздатчика кормов составит (в це нах 2009
года): за срок службы 961379,2
руб., за год J 20172,40 руб. при производстве 2250 т кормосмеси.
Расчет экономической
эффективности проводили на основании результатов хо зяйственных испытаний в соответствии с
методикой определения экономической эф фективности сельскохозяйственных мащин.
В результате расчетов установлено,
что экономический эффект
от использования смесителя-раздатчика кормов составит (в це нах 2009
года): за срок службы 961379,2
руб., за год J 20172,40 руб. при производстве 2250 т кормосмеси.
Таблица 1 - Показатели экономической эффективности результатов исследования
|
Показатели |
Варианты |
|
|
Базовый |
Проект |
|
|
Балансовая стоимость оборудования - всего, руб. |
2228279 |
2195465 |
|
Удельные капиталовложения, руб./т |
990,35 |
975:76 |
|
Годовые эксплуатаuионные издержки, руб. |
i054629,4 |
939379,1 |
|
Затраты труда на приготовление lт кормосмеси, чел·ч/т |
0,44 |
0,28 |
|
Годовая экономия эксплуатационных издержек, руб. |
|
115250,30 |
|
Годовой экономический эффект, руб. |
|
120172,40 |
16
ОБЩИЕ ВЫВОДЫ
1. Скармливание крупному рогатому с1,оту корма в виде смеси различных ком rrонентов на 10... 25% увеличит продуктивность животных, на 15... 20% снизит расход кормов на единицу продукции и существенно снижает удельный расход энергии. Со вершенствования смесителей, их рабочих органов и в целом процесса смешивания - главное направление исследования для повышения эффективности приготовления кормов для крупного рогатого скота.
2. ;Для получения более обоснованных результатов при оценке процесса смеши вания исследования проводились по трем основным направлениям:
- определения физико-механических характеристик кормовых компонентов и их смеси;
- обоснование оптимальных конструктивных и режимных параметров шнекового
смесителя;
- оценка энергетических и качественных показателей процесса смешивания.
3. Получена математическая модель движения смеси в объемных смесителях шнекового типа, учитывающая конструктивные особенности рабочих органов смесите ля, физико-механические свойства кормов и режимы работы смесителя (1,2... 7).
4. Теоретический анализ процесса приготовления кормовой смеси показал, что минимизация энергозатрат может быть достигнута оптимизацией угла установки лопа стей-ножей нижнего выгрузного mнека смесителя, который составляет а= 40°, 45°, 50°. Обоснована форма лопастей-ножей шнека, обеспечивающая лучшее перемешивание сме си, благодаря особой форме поверхности лопасти и перегиба в ее средней части. Предло жен алгоритм построения линий контура лопасти-ножа.
5. В результате экспериментальных исследований установлено, что в пределах производственных испытаний наибольшую влажность 82% имела кормовая свекла, си лос - 77,3%, сено- 13%, солома-14% и кормовая смесь- 70,4%.
Насыпная (объемная) масса компонентов кормов и кормосмеси в целом зависит от фракционного состава, который меняется в процессе работы смесителя:
- насыпная (объемная) масса компонентов кормов после воздействия на них ра бочих органов (шнеки с лопастями-ножами) смесителя увеличивается: силоса - на 17%, сена - на 31, соломы - на 23 и кормовой свеклы - на 3%;
Установлено, что коэффициент внутреннего трения в два раза больше коэффици ента внешнего трения. Это позволяет утверждать, что значительная часть энергии рас ходуется на преодоление внутреннего трения, то есть на перемещение кормов в про цессе смешивания. Степень однородности кормовой смеси в условиях опыта составила 89-94%.
6. Численный анализ регрессионных моделей позволил выявить следующее:
- минимальная мощность на приводе Nrnin(0,94;40) = 5,86 кВт будет при угловой частоте вращения шнека ш=О,94 с·1 и угле установки лопасти-ножа а=40°, а макси мальная Nrn.. (2,83;50) =16,11 кВт будет при угловой частоте вращения шнека ш = 2,83 с·1и угле установки лопасти-ножа a=S0°.
- минимальная удельная энергоемкость при времени смешивания кормов t=5
мин. qmin(l,884;45) =0,08 кВт·ч/т будет при угловой частоте вращения шнека QJ = 1,884 с·1 и угле установки лопасти-ножа а =45°, а максимальная qmax(27;50) =0,33 кВт-ч/т бу-
17
дет при угловой частоте вращения шнека ш =2,826 с·1 и угле установки лопасти-ножа
а =-=50°.
Введение Актуальность темы
Обоснованы элементы конструкции нижнего выгрузного шнека и форма лопа стей-ножей шнеков
Структура и объем диссертации
НАКОПЛЕНИЕ • jO ло
T(t) и управляющие воздействия: давление кормового сырья в бункере- сме сителе
Участок выгрузного шнека, расположенный в зоне выгрузного окна, выполнен с установленными по винтовой линии на его полом валу лопастями-ножами, которые за креплены под углом 40-50°…
Разложим силу тяжести на силу нормального давления на лопасть-нож шнека mg sina и силу, касательную к лопасти-ножу шнека mg cosa, а центробежную силу moiR на…
Подставляя в уравнение (3) значение соответствующих параметров из выраже ния(2), (4) и (5) и решая относительно
Тогда, из условия перекрытия сечения наружного диаметра шнека, лопасти-ножи должны представлять сегменты эллипса
Параметр n 1 определяет форму линии
А- А jl l 17 t в г д е
В качестве параметров, с помощью которых оценивался объект исследований, приняли требуемую мощность (N) на привод, удельную энергоемкость (q) процесса смешивания компонентов кормов, неоднородность смеси (v)…
Графически зависимость удельной энергоемкости q от угловой частоты враще ния шнека ш, угла установки лопасти-ножа а и времени смешивания кормов 1 , полу ченная в…
ОБЩИЕ ВЫВОДЫ 1. Скармливание крупному рогатому с1,оту корма в виде смеси различных ком rrонентов на 10
17 дет при угловой частоте вращения шнека ш =2,826 с· 1 и угле установки лопасти-ножа а =- = 50 ° .

© ООО «Знанио»
С вами с 2009 года.
![]()