Поделиться

Практическое занятие № 33 -35.
Тема: «Изучение последовательности создания микропроцессорных систем. Изучение средств разработки микропроцессорных систем
Проектирование микропроцессорной системы»
Цель: углубление знаний по аппаратным принципам построения устройств микропроцессорной техники и приобретение практических навыков по разработке микропроцессорных систем.
Теория
Общие сведения о работе микропроцессорной системы управления
Микропроцессорная система (далее МПС) предназначена для управления некоторыми объектами.
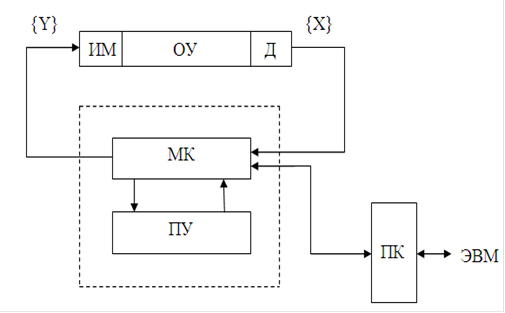
Рисунок 1 - Структурная схема связи МПС с внешними объектами.
Согласно рисунку 1 микропроцессорная система принимает информацию {Х} об объекте управления от аналоговых и цифровых датчиков (Д), вырабатывает управляющее воздействие {Y} в соответствии с законом управления и подает их исполнительные механизмы. Законы управления реализуется в микропроцессор системе, состоящей из микроконтроллера- управляющей микро ЭВМ и пульта управления. С помощью пульта управления пользователь получает возможность управлять работой МПС: запускать ее и останавливать, выдавать значение некоторых установок (констант) и т.п.
В проекте необходимо разработать структурную схему микропроцессорной системы и схему работы МПС, устройства связи с датчиком и исполнительными механизмами, и программы, обеспечивающие выполнение заданного алгоритма и алгоритма обмена, осуществляется оценка характеристик МПС.
Критерием проектирования является минимизация аппаратных затрат, выраженных в числе условных корпусов.
Выполняемые функции
В разрабатываемой микропроцессорной системе реализуется функция, состоящая из нескольких подфункций, объединенных в следующие группы:
− подфункции взаимодействия с объектом управления (прием и обработка данных с датчиков и передача результата на исполнительный механизм).
− подфункции взаимодействия с пультом управления (прием запроса на пульт управления и выдача на индикатор значения).
Подфункции взаимодействия с объектами управления
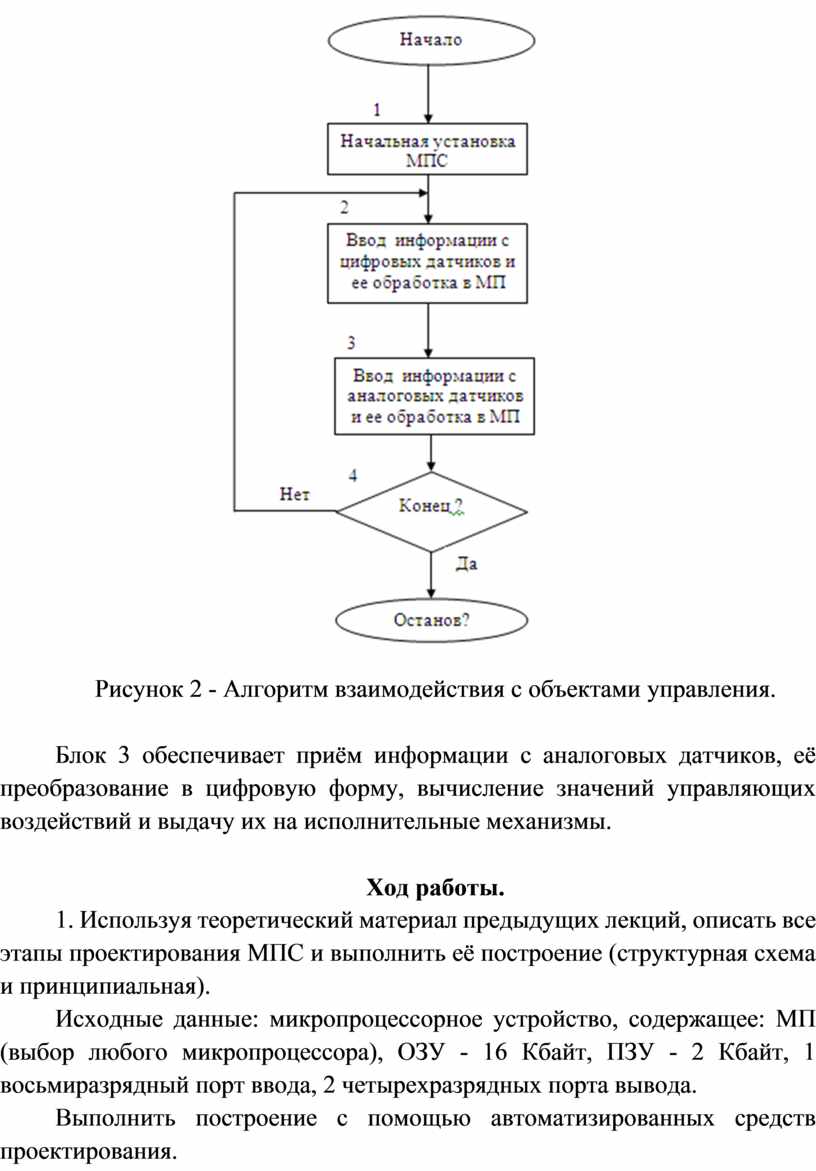
На рисунке 2 приведён алгоритм взаимодействия с объектами управления.
Блок 1 выполняет начальную установку системы и засылку в выходные каналы начальных значений управляющих воздействий и т.д.
Блок 2 реализует задачу логического управления: принимает информацию от двоичных датчиков, вычисляет значение булевой функции в соответствии с заданным выражением и выдает это значение в качестве управляющего сигнала по соответствующему выходному каналу на исполнительный механизм. При единичном значении функции МПС вырабатывает выходной сигнал у =1 длительностью 10 мкс.
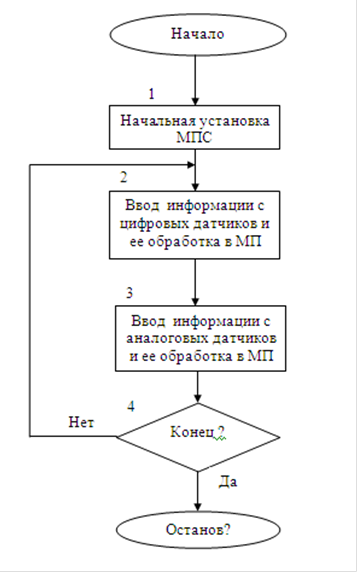
Рисунок 2 - Алгоритм взаимодействия с объектами управления.
Блок 3 обеспечивает приём информации с аналоговых датчиков, её преобразование в цифровую форму, вычисление значений управляющих воздействий и выдачу их на исполнительные механизмы.
Ход работы.
1. Используя теоретический материал предыдущих лекций, описать все этапы проектирования МПС и выполнить её построение (структурная схема и принципиальная).
Исходные данные: микропроцессорное устройство, содержащее: МП (выбор любого микропроцессора), ОЗУ - 16 Кбайт, ПЗУ - 2 Кбайт, 1 восьмиразрядный порт ввода, 2 четырехразрядных порта вывода.
Выполнить построение с помощью автоматизированных средств проектирования.
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.