Поделиться

оПрактическое занятие № 88
Расчёт мощности и подбор привода, составление кинематической схемы привода.
Цели: уметь правильно обслуживать машину.
Что необходимо выполнить студенту для получения зачета
Изучить данную методическую разработку.
Выполнить конспект.
Ответить на контрольные вопросы.
Сделать вывод о проделанной работе.
Защитить практическую работу.
Общие сведения по изучаемой теме
Выбор электродвигателя и кинематический расчет привода
Большинство современных технологических машин проектируют и создают по схеме: энергетическая машина, передаточный механизм, исполнительный орган машины, система управления.
Устройство, состоящее из двигателя, передаточных механизмов и системы управления для приведения в движение машин и механизмов называется приводом.
Двигатель является одним из основных элементов привода. От типа двигателя, его мощности, частоты вращения зависят конструктивные и эксплуатационные характеристики рабочей машины и ее привода. Выбор электродвигателя предусматривает определение его мощности, типа, частоты вращения вала и основных размеров.
Тип двигателя выбирается с учетом ряда факторов, и в том числе:
- назначения механизма или машины, для которой проектируется данный привод;
- наличия того или иного источника энергии;
- величины потребляемой мощности;
- ограничений по массе, габаритным размерам и условиям работы привода;
- режима работы привода и обеспечения соответствующей механической характеристики.
Назначение машины обусловливает основные требования к приводу, специфику его работы и характеристики. При этом учитываются мобильность, внешняя среда, температурные условия, географические особенности и т.п.
Наличие электроэнергии предопределяет выбор электропривода как наиболее простого и надежного.
Угловые скорости двигателя ωдв и исполнительного органа машины ωном, как правило, не равны. Электротехническая промышленность для общемашиностроительного применения выпускает электродвигатели с синхронной частотой вращения пс = 3000 мин-1, пс = 1500 мин-1, пс = 1000 мин-1 и пс = 750 мин-1. Рабочие органы технологических машин функционируют при очень большом разнообразии угловых скоростей. Для решения этих противоречий применяют приводы. Ключевым звеном привода является передаточный механизм, состоящий из набора механических передач, которые могут быть закрытыми (в корпусе) и открытыми. В качестве закрытых передач наибольшее распространение получили зубчатые (цилиндрические, конические) и червячные передачи. В качестве открытых - передачи с гибкой связью (ременные, цепные) и зубчатые.
Передача, расположенная между двумя соседними валами, называется одной ступенью привода.
Конкретный состав передач в приводе зависит в основном от двух критериев:
1) от общего передаточного числа привода uобщ;
2) от компоновки привода, т.е. от объема заданного пространства, в котором должен размещаться привод.
1. Исходные данные для кинематического расчета привода.
Исходными данными для выполнения кинематического расчета служат:
- структурная схема привода;
- тяговое усилие Ft, Н и скорость движения v, м/с тягового органа или вращающий момент Т, Н∙м на приводном валу рабочего органа машинного агрегата и угловая скорость ω, рад/с этого вала;
- диаметр барабана D, м;
- вид передачи (реверсивная и нереверсивная);
- срок службы передачи.
2. Задачи кинематического расчета привода.
2.1. Подобрать электродвигатель.
2.2. Определить общее передаточное число.
2.3. Разбить передаточное число привода между ступенями.
2.4. Определить мощность, частоту вращения и вращающий момент на каждом валу.
1.1. Выбор электродвигателя привода
В зависимости от потребляемой мощности, а также от ограничений по массе и размерам выбирается тот или иной тип электродвигателя.
Выбранный электродвигатель должен удовлетворять следующим условиям:
- обеспечивать момент, достаточный для разгона механизма с заданным ускорением, а при торможении двигателем - замедление механизма;
- при работе в заданном режиме не должен испытывать длительных перегрузок, ведущих к перегреву электродвигателя.
При выборе двигателя следует придерживаться следующих рекомендаций:
1. Электрические и механические параметры приводов (Рном, Uном, nном, относительная продолжительность рабочего периода, Тпуск, Тmin, Tmax, пределы регулирования числа оборотов и т.п.) должны соответствовать параметрам приводимых ими механизмов во всех режимах их работы в данной установке.
2. Для механизмов, сохраняющих технологическую непрерывность в работе, должен быть обеспечен самозапуск их электродвигателей после кратковременных перерывов (не более 2,5 с), связанных с перерывом питания или понижением напряжения из-за короткого замыкания, при этом применять двигатель большей мощности, чем для непрерывной нормальной работы, не требуется.
3. Для привода механизмов, не требующих регулирования числа оборотов, независимо от их мощности, рекомендуется применять синхронные или асинхронные электродвигатели с короткозамкнутым ротором.
4. Для привода механизмов, имеющих тяжелые условия пуска или работы, либо требующих изменения числа оборотов, следует применять двигатели с наиболее простыми и экономичными методами пуска или регулирования чисел оборотов, возможными в данной установке.
5. Синхронные двигатели, как правило, должны иметь устройства форсировки возбуждения или компаундирования. Синхронные двигатели в случаях, когда они по своей мощности могут обеспечить регулирование напряжения или режима реактивной мощности в данном узле нагрузки, должны иметь автоматический режим включения.
6. Электродвигатели постоянного тока допускается применять только в тех случаях, когда электродвигатели переменного тока не обеспечивают требуемых характеристик или неэкономичны.
7. Пуск асинхронных электродвигателей с короткозамкнутым ротором и синхронных двигателей должен производиться, как правило, непосредственным включением в сеть (прямой пуск). При невозможности прямого пуска следует применять пуск через трансформатор или автотрансформатор. В особых случаях допускается пуск с подъемом частоты от нуля.
Мощность электродвигателя всегда относят к определенному режиму работы. При проектировании привода внешние сопротивления и режим работы являются заданными.
Различают три номинальных режима работы двигателей:
- продолжительный,
- кратковременный,
- повторно-кратковременный.
При продолжительном режиме работы двигатель нагревается до установившейся температуры в отличие от кратковременного, при котором этого не происходит.
При повторно-кратковременном режиме происходит пуск и остановка двигателя, при этом нагрев электродвигателя и возможность реализации заданной мощности определяются продолжительностью включения (ПВ) по относительному времени за цикл, равный 10 мин.
По величине ПВ различают четыре основных повторно-кратковременных режима работы.
Режим работы является продолжительным (ПВ 100%), если время одного цикла работы превышает 10 мин.
При расчете мощности двигателя в повторно-кратковременном режиме работы возможны три случая.
1. Фактический режим работы двигателя соответствует одному из стандартных режимов; нагрузка постоянная.
В этом случае по каталогу выбирается двигатель, мощность которого при заданном ПВ равна требуемой.
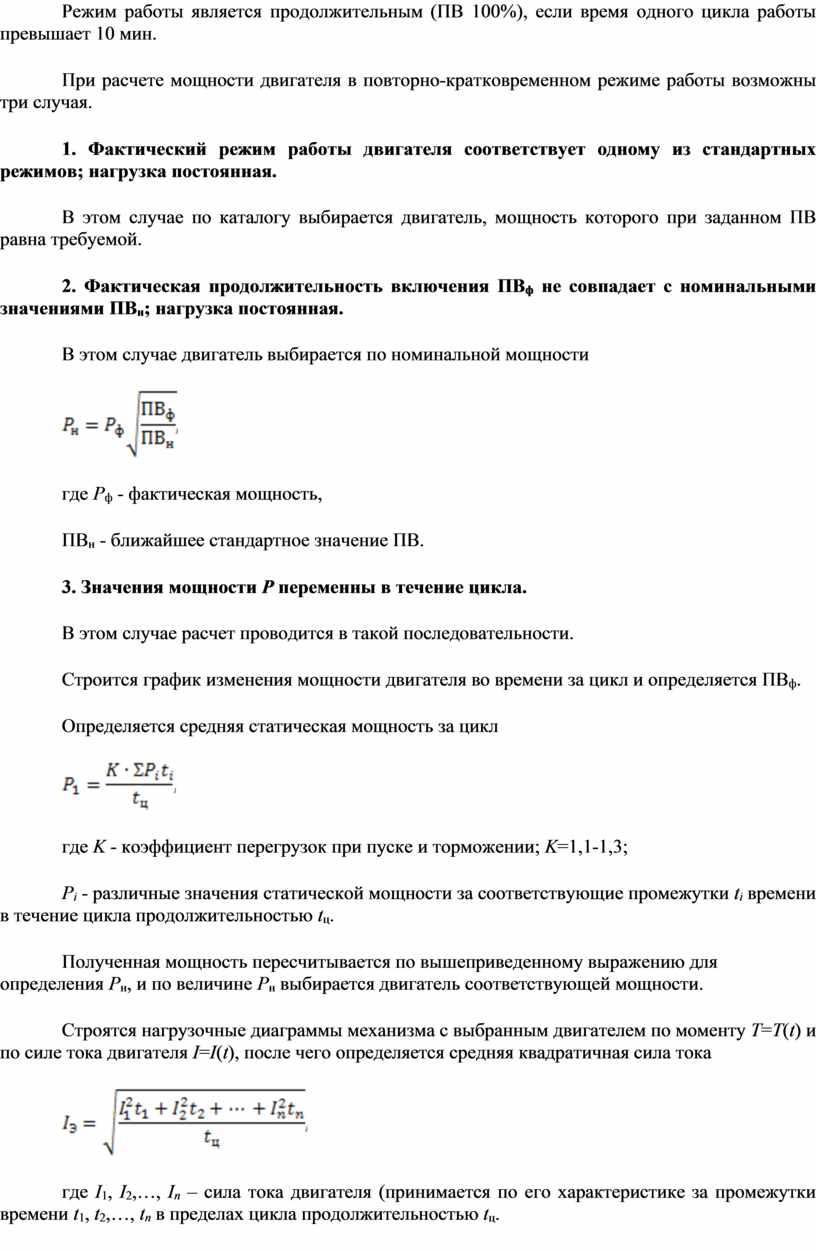
2. Фактическая продолжительность включения ПВф не совпадает с номинальными значениями ПВн; нагрузка постоянная.
В этом случае двигатель выбирается по номинальной мощности

где Рф - фактическая мощность,
ПВн - ближайшее стандартное значение ПВ.
3. Значения мощности Р переменны в течение цикла.
В этом случае расчет проводится в такой последовательности.
Строится график изменения мощности двигателя во времени за цикл и определяется ПВф.
Определяется средняя статическая мощность за цикл
![]()
где K - коэффициент перегрузок при пуске и торможении; K=1,1-1,3;
Рi - различные значения статической мощности за соответствующие промежутки ti времени в течение цикла продолжительностью tц.
Полученная мощность пересчитывается по вышеприведенному выражению для определения Рн, и по величине Рн выбирается двигатель соответствующей мощности.
Строятся нагрузочные диаграммы механизма с выбранным двигателем по моменту Т=Т(t) и по силе тока двигателя I=I(t), после чего определяется средняя квадратичная сила тока
где I1, I2,…, In – сила тока двигателя (принимается по его характеристике за промежутки времени t1, t2,…, tn в пределах цикла продолжительностью tц.
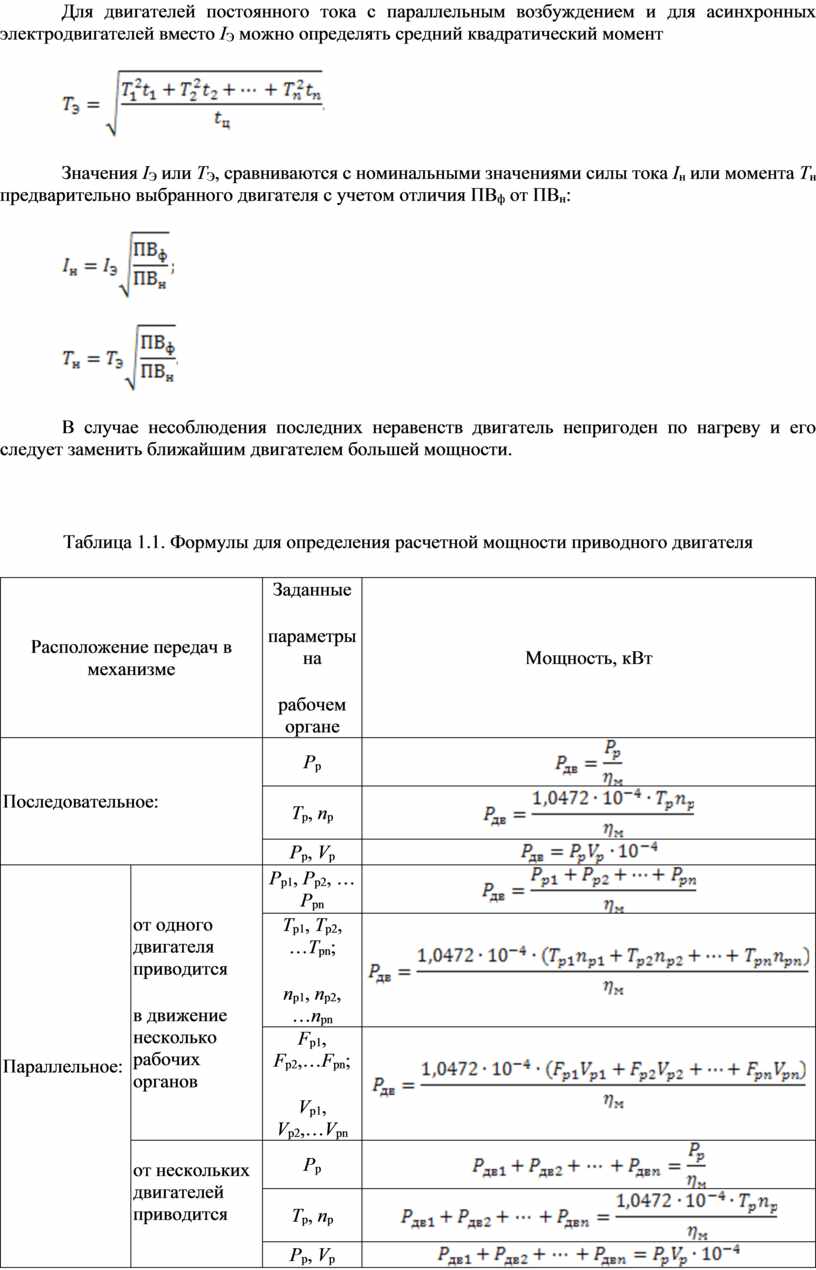
Для двигателей постоянного тока с параллельным возбуждением и для асинхронных электродвигателей вместо IЭ можно определять средний квадратический момент
Значения IЭ или ТЭ, сравниваются с номинальными значениями силы тока Iн или момента Тн предварительно выбранного двигателя с учетом отличия ПВф от ПВн:


В случае несоблюдения последних неравенств двигатель непригоден по нагреву и его следует заменить ближайшим двигателем большей мощности.
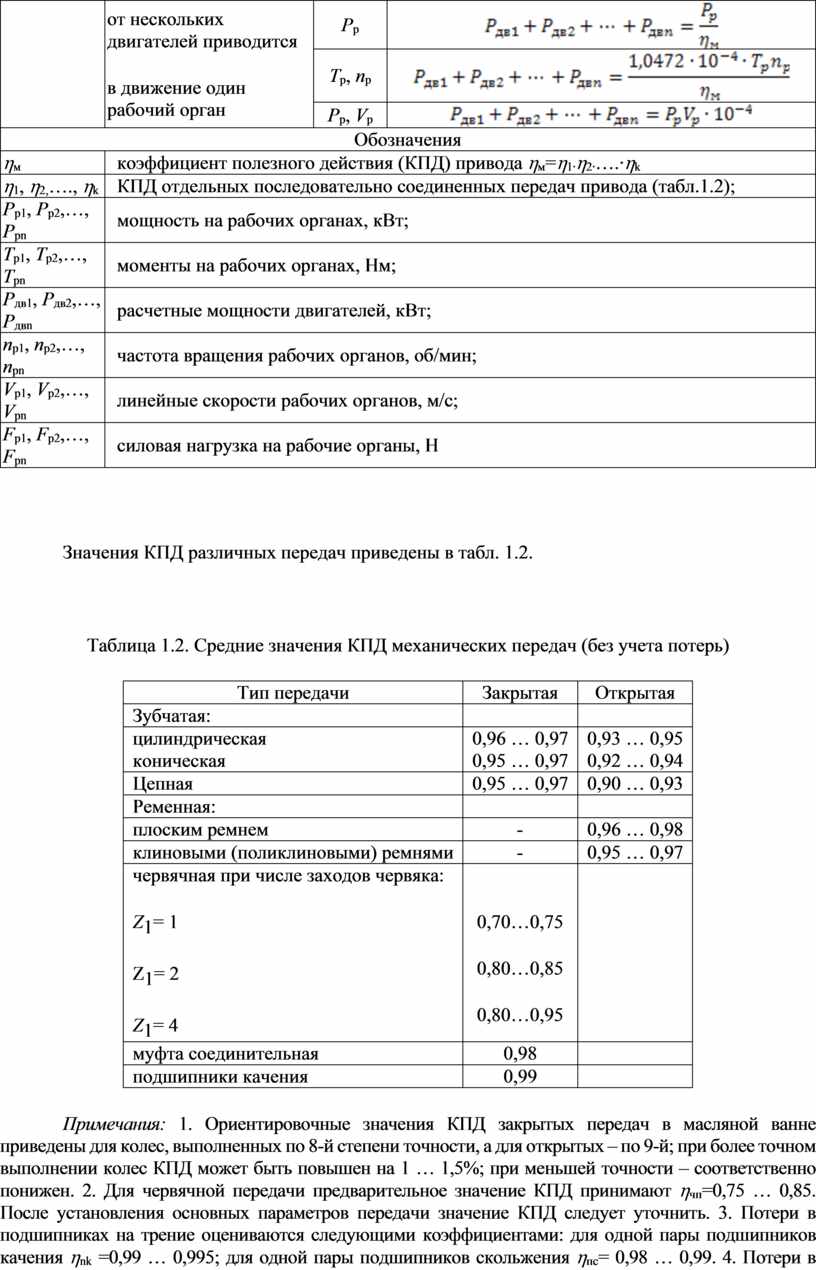
Таблица 1.1. Формулы для определения расчетной мощности приводного двигателя
|
Расположение передач в механизме |
Заданные параметры на рабочем органе |
Мощность, кВт |
|
|
Последовательное: |
Рр |
|
|
|
Тр, nр |
|
||
|
Рр, Vр |
|
||
|
Параллельное: |
от одного двигателя приводится в движение несколько рабочих органов |
Рр1, Рр2, … Ррn |
|
|
Тр1, Тр2, …Трn; nр1, nр2, …nрn |
|
||
|
Fр1, Fр2,…Fрn; Vр1, Vр2,…Vрn |
|
||
|
от нескольких двигателей приводится в движение один рабочий орган |
Рр |
|
|
|
Тр, nр |
|
||
|
Рр, Vр |
|
||
|
Обозначения |
|||
|
ηм |
коэффициент полезного действия (КПД) привода ηм=η1∙η2∙….∙ηk |
||
|
η1, η2,…., ηk |
КПД отдельных последовательно соединенных передач привода (табл.1.2); |
||
|
Рр1, Рр2,…, Ррn |
мощность на рабочих органах, кВт; |
||
|
Тр1, Тр2,…, Трn |
моменты на рабочих органах, Нм; |
||
|
Рдв1, Рдв2,…, Рдвn |
расчетные мощности двигателей, кВт; |
||
|
nр1, nр2,…, nрn |
частота вращения рабочих органов, об/мин; |
||
|
Vр1, Vр2,…, Vрn |
линейные скорости рабочих органов, м/с; |
||
|
Fр1, Fр2,…, Fрn |
силовая нагрузка на рабочие органы, Н |
||
Значения КПД различных передач приведены в табл. 1.2.
Таблица 1.2. Средние значения КПД механических передач (без учета потерь)
|
Тип передачи |
Закрытая |
Открытая |
|
Зубчатая: |
|
|
|
цилиндрическая |
0,96 … 0,97 |
0,93 … 0,95 |
|
коническая |
0,95 … 0,97 |
0,92 … 0,94 |
|
Цепная |
0,95 … 0,97 |
0,90 … 0,93 |
|
Ременная: |
|
|
|
плоским ремнем |
- |
0,96 … 0,98 |
|
клиновыми (поликлиновыми) ремнями |
- |
0,95 … 0,97 |
|
червячная при числе заходов червяка: Z1= 1 Z1= 2 Z1= 4 |
0,70…0,75 0,80…0,85 0,80…0,95 |
|
|
муфта соединительная |
0,98 |
|
|
подшипники качения |
0,99 |
|
Примечания: 1. Ориентировочные значения КПД закрытых передач в масляной ванне приведены для колес, выполненных по 8-й степени точности, а для открытых – по 9-й; при более точном выполнении колес КПД может быть повышен на 1 … 1,5%; при меньшей точности – соответственно понижен. 2. Для червячной передачи предварительное значение КПД принимают ηчп=0,75 … 0,85. После установления основных параметров передачи значение КПД следует уточнить. 3. Потери в подшипниках на трение оцениваются следующими коэффициентами: для одной пары подшипников качения ηnk =0,99 … 0,995; для одной пары подшипников скольжения ηпс= 0,98 … 0,99. 4. Потери в муфте принимаются ηмуф = 0,98. 5. В приводах с параллельными передачами, например, с раздвоенными колёсами, значения КПД из таблицы 1.2 учитывают только один раз.
В задании на курсовое проектирование момент на выходном валу задан в виде графика нагрузки, который учитывает фактические условия работы привода.
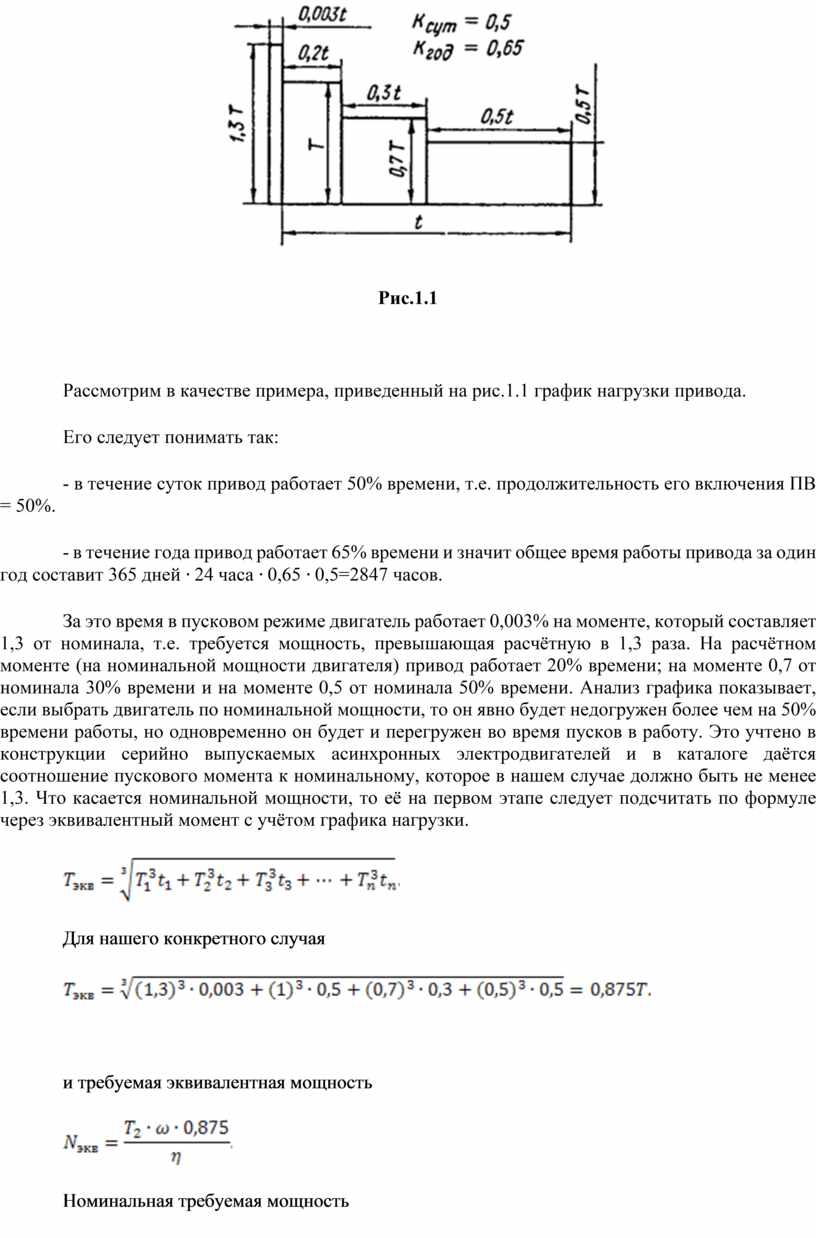
Рис.1.1
Рассмотрим в качестве примера, приведенный на рис.1.1 график нагрузки привода.
Его следует понимать так:
- в течение суток привод работает 50% времени, т.е. продолжительность его включения ПВ = 50%.
- в течение года привод работает 65% времени и значит общее время работы привода за один год составит 365 дней ∙ 24 часа ∙ 0,65 ∙ 0,5=2847 часов.
За это время в пусковом режиме двигатель работает 0,003% на моменте, который составляет 1,3 от номинала, т.е. требуется мощность, превышающая расчётную в 1,3 раза. На расчётном моменте (на номинальной мощности двигателя) привод работает 20% времени; на моменте 0,7 от номинала 30% времени и на моменте 0,5 от номинала 50% времени. Анализ графика показывает, если выбрать двигатель по номинальной мощности, то он явно будет недогружен более чем на 50% времени работы, но одновременно он будет и перегружен во время пусков в работу. Это учтено в конструкции серийно выпускаемых асинхронных электродвигателей и в каталоге даётся соотношение пускового момента к номинальному, которое в нашем случае должно быть не менее 1,3. Что касается номинальной мощности, то её на первом этапе следует подсчитать по формуле через эквивалентный момент с учётом графика нагрузки.
![]()
Для нашего конкретного случая
![]()
и требуемая эквивалентная мощность
![]()
Номинальная требуемая мощность
![]()
Подсчитав то и другое значение можно приступать к выбору мощности электродвигателя.
Пусть, например, нам требуется выбрать мощность двигателя ленточного транспортёра со следующими параметрами: скорость транспортёра - 0,5м/с, усилие на ленте транспортёра - 4000Н, общее КПД привода - 0,81, график нагрузки приведен выше.
Номинальная мощность N=4000∙0,5/0,81=2470 Вт=2,47 кВт.
Эквивалентная мощность Nэкв=N∙0,875=2,47∙0,875=2,16 кВт.
По каталогу выпускаемых электродвигателей исходя из номинальной мощности необходимо выбрать двигатель мощностью 3 квт. Исходя из эквивалентной мощности можно выбрать двигатель мощностью 2,2 квт.
Пусть нам требуется электродвигатель с частотой вращения 1500 мин –1 (самая оптимальная частота вращения с точки зрения экономичности и рекомендуемая в курсовом проектировании). Для данных двигателей по каталогу отношение пускового момента к номинальному Тп / Тн = 2.
Требуемая пусковая мощность по графику нагрузки NП=1,3∙2,47=3,21 кВт.
Серийный электродвигатель мощностью 2,2 кВт обеспечит на пуске мощность 2,2∙2=4 кВт. Таким образом, мы имеем право выбрать двигатель мощностью 2,2 кВт, но он будет перегружен на (2,47/2,2) - 11,2% по номинальной мощности. Продолжительность включения нашего двигателя по заданию ПВ = 50% и значит допустима перегрузка по номинальной мощности в пределах, указанных в таблице 1.3.
Таблица 1.3
|
Продолжительность включения электродвигателя, ПВ % |
Допустимая перегрузка по номинальной мощности для асинхронных двигателей серии АИР |
|
100% |
0% |
|
80% |
5% |
|
60% |
10% |
|
40% |
20% |
С учётом таблицы 1.3 мы окончательно имеем право выбрать электродвигатель мощностью 2,2 кВт, хотя по расчёту требуется мощность 2,47 кВт.
И далее в расчётах зубчатых или червячных передач в качестве расчётного можно принимать не номинальный вращающий момент, а эквивалентный.
1.2. Определение частоты вращения вала электродвигателя
Требуемая частота вращения вала электродвигателя определяется по формуле
nэд = n2 ∙ i,
где i − передаточное отношение привода.
В дальнейших расчетах вместо передаточного отношения i = nэд / n2 применяют общее передаточное число привода uобщ
Общее передаточное число привода
![]()
где nдв – асинхронная частота вращения двигателя, мин-1;
nB – частота вращения приводного вала рабочего органа, мин-1;
u1, u2 – передаточные числа элементов привода.
Частота вращения приводного вала составляет, например,
для ленточного транспортера:
![]()
для цепной передачи (звездочки):
![]()
где D – диаметр барабана или звездочки, м;
z – число зубьев звездочки;
p – шаг тяговой цепи, мм.
Применение u вместо i связано только с принятой формой расчетных зависимостей для контактных напряжений, значения которых не зависят от того, какое из зубчатых колес является ведущим.
Руководствуясь рекомендациями по выбору значений передаточных чисел в соответствии с заданным типом передачи в редукторе (см. табл. 1.4), определяют возможный диапазон частот вращения вала электродвигателя
nэд = n2 ∙ (umin…umax).
По рассчитанной мощности Р и диапазону nэд из табл. 1.6 выбирают электродвигатель таким образом, чтобы его номинальная мощность Pном≥P, а номинальная частота nном вращения вала была самой близкой (из возможных вариантов) к большему значению диапазона nэд. В этом случае размеры и стоимость электродвигателя будут наименьшими. При этом следует иметь в виду, что большая частота вращения вала электродвигателя при одинаковой мощности вызывает увеличение передаточного числа редуктора, а, следовательно, увеличение его длины и высоты. Меньшая частота вращения вызывает увеличение размеров электродвигателя и увеличение ширины зубчатых колес, а следовательно, уменьшение размеров редуктора.
Если скоростной диапазон достаточно большой, т.е. по скоростной характеристике можно выбрать несколько двигателей, окончательное решение принимается с учетом следующих соображений. Быстроходные двигатели легче и дешевле тихоходных, поэтому предпочтительнее. Однако выбор быстроходного двигателя приводит к увеличению общего передаточного отношения редуктора и, как правило, к увеличению его габаритов, массы и стоимости. Если позволяет скоростной диапазон, рекомендуется выбирать два двигателя с различной скоростной характеристикой и последующий расчет вести параллельно. В конце расчета производится анализ вариантов по кинематическим, технико-экономическим и другим признакам и выбирается окончательный вариант.
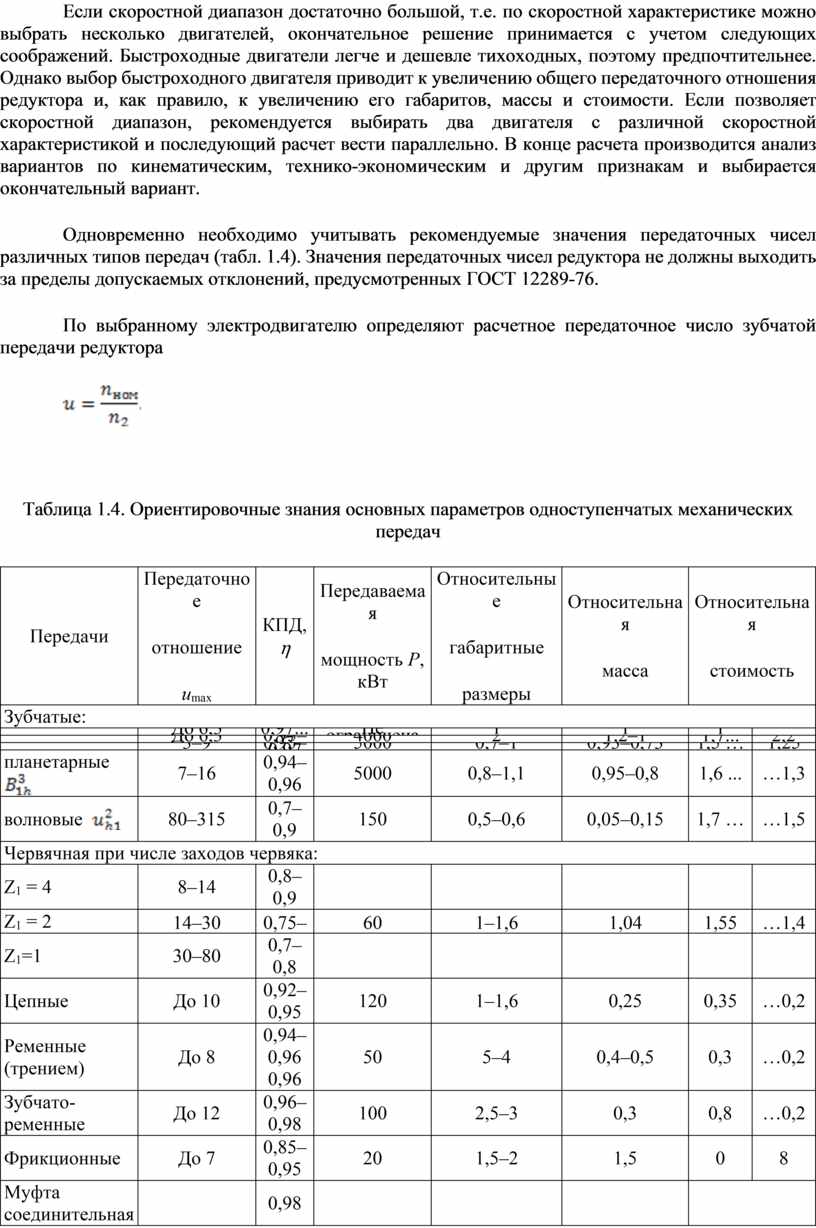
Одновременно необходимо учитывать рекомендуемые значения передаточных чисел различных типов передач (табл. 1.4). Значения передаточных чисел редуктора не должны выходить за пределы допускаемых отклонений, предусмотренных ГОСТ 12289-76.
По выбранному электродвигателю определяют расчетное передаточное число зубчатой передачи редуктора
![]()
Таблица 1.4. Ориентировочные знания основных параметров одноступенчатых механических передач
|
Передачи |
Передаточное отношение umax |
КПД, η |
Передаваемая мощность Р, кВт |
Относительные габаритные размеры |
Относительная масса |
Относительная стоимость |
|
|
Зубчатые: |
|||||||
|
цилиндрические |
До 6,3 |
0,97.... |
Не ограничена |
1 |
1 |
1 |
|
|
конические |
До 6,3 |
0,95–97 |
4000 |
2 |
1,2–1 |
1,7... |
2,2 |
|
планетарные |
3–9 |
0,95–0,97 |
5000 |
0,7–1 |
0,93–0,73 |
1,5 … |
1,25 |
|
планетарные |
7–16 |
0,94–0,96 |
5000 |
0,8–1,1 |
0,95–0,8 |
1,6 ... |
…1,3 |
|
волновые |
80–315 |
0,7–0,9 |
150 |
0,5–0,6 |
0,05–0,15 |
1,7 … |
…1,5 |
|
Червячная при числе заходов червяка: |
|||||||
|
Z1 = 4 |
8–14 |
0,8–0,9 |
|
|
|
|
|
|
Z1 = 2 |
14–30 |
0,75–0,85 0,85 |
60 |
1–1,6 |
1,04 |
1,55 |
…1,4 |
|
Z1=1 |
30–80 |
0,7–0,8 |
|
|
|
|
|
|
Цепные |
До 10 |
0,92–0,95 |
120 |
1–1,6 |
0,25 |
0,35 |
…0,2 |
|
Ременные (трением) |
До 8 |
0,94–0,96 0,96 |
50 |
5–4 |
0,4–0,5 |
0,3 |
…0,2 |
|
Зубчато-ременные |
До 12 |
0,96–0,98 |
100 |
2,5–3 |
0,3 |
0,8 |
…0,2 |
|
Фрикционные |
До 7 |
0,85–0,95 |
20 |
1,5–2 |
1,5 |
0 |
8 |
|
Муфта соединительная |
|
0,98 |
|
|
|
|
|
|
Подшипники качения (одна пара) |
|
0,99 |
|
|
|
|
|
|
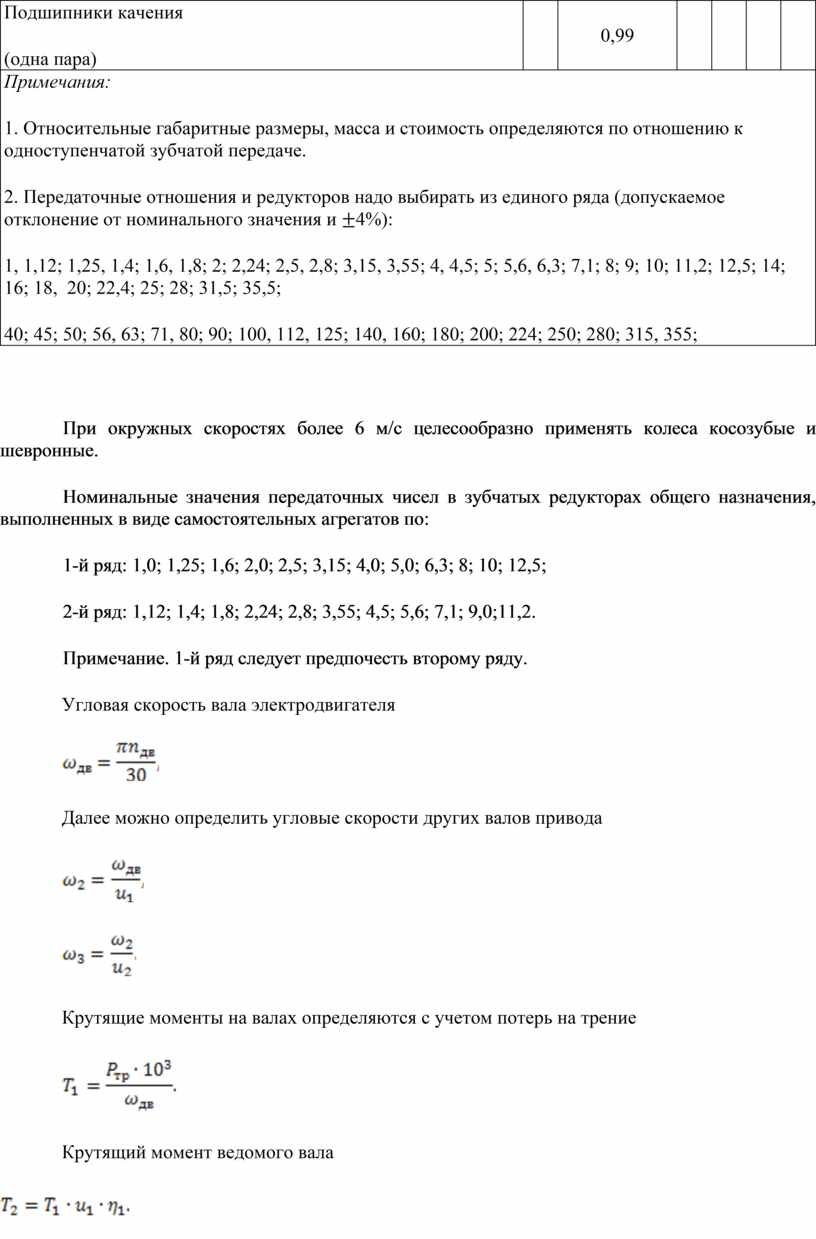
Примечания: 1. Относительные габаритные размеры, масса и стоимость определяются по отношению к одноступенчатой зубчатой передаче. 2. Передаточные отношения и редукторов надо выбирать из единого ряда (допускаемое отклонение от номинального значения и ±4%): 1, 1,12; 1,25, 1,4; 1,6, 1,8; 2; 2,24; 2,5, 2,8; 3,15, 3,55; 4, 4,5; 5; 5,6, 6,3; 7,1; 8; 9; 10; 11,2; 12,5; 14; 16; 18, 20; 22,4; 25; 28; 31,5; 35,5; 40; 45; 50; 56, 63; 71, 80; 90; 100, 112, 125; 140, 160; 180; 200; 224; 250; 280; 315, 355; |
|||||||
При окружных скоростях более 6 м/с целесообразно применять колеса косозубые и шевронные.
Номинальные значения передаточных чисел в зубчатых редукторах общего назначения, выполненных в виде самостоятельных агрегатов по:
1-й ряд: 1,0; 1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8; 10; 12,5;
2-й ряд: 1,12; 1,4; 1,8; 2,24; 2,8; 3,55; 4,5; 5,6; 7,1; 9,0;11,2.
Примечание. 1-й ряд следует предпочесть второму ряду.
Угловая скорость вала электродвигателя
![]()
Далее можно определить угловые скорости других валов привода
![]()
![]()
Крутящие моменты на валах определяются с учетом потерь на трение
![]()
Крутящий момент ведомого вала
![]()
Скачано с www.znanio.ru
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.