Поделиться


«Робототехника и Легоконструирование»
Димитрова Ольга Иннокентьевна, учитель информатики
МАОУ «гимназия города Юрги»
Цель работы - изучение влияние датчиков на работу мотора
Актуальность исследовательской работы состоит в разработке управляющего механизма на основе программно-аппаратного комплекта LEGO WE DO.
Задачи:
разработать управляющий механизм на основе комплекта LEGO WE DO.
сделать конструкцию робота вилочного погрузчика , вездехода
составить программу управления работой данных конструкций, провести эксперимент, получить результаты;
выявить факторы, зависимости влияния датчиков на работу мотора;
определить технические характеристики датчиков - угол срабатывания датчика наклона и предельное срабатывание датчика расстояния.

Проектный продукт - это управляемые роботы, построенные своими руками, выполняющими различные функции.

Конструктор LEGO содержит детали: оси, шкивы, кулачки, зубчатые колеса, USB LEGO- контроллер, мотор, датчик наклона и датчик расстояния. Программирование моделей осуществляется с помощью программы, которая управляет работой робота.
Технические проблемы возникшие при разработки конструкций натолкнули на решение сложных задач:
совмещение возможностей механизмов LEGO со стандартным программным обеспечением;
отсутствие подобных механизмов в описании инструкций по сборке;
создание взаимосвязи между управляющей механикой и управляющей программой (датчик – программа – исполнительный механизм).
Для решения этих задач были использованы следующие навыки и умения:
опыт создания элементарных конструкций на основе стандартных программ и инструкции по сборке;
опыт создания собственных программ для управления простых механизмов (программа – двигатель, программа – датчик, программа – двигатель – датчик);
изучение управляющих конструкций современных автомобилей: рычаг переключения скоростей – коробка передач; рулевое колесо – поворотный механизм колес.
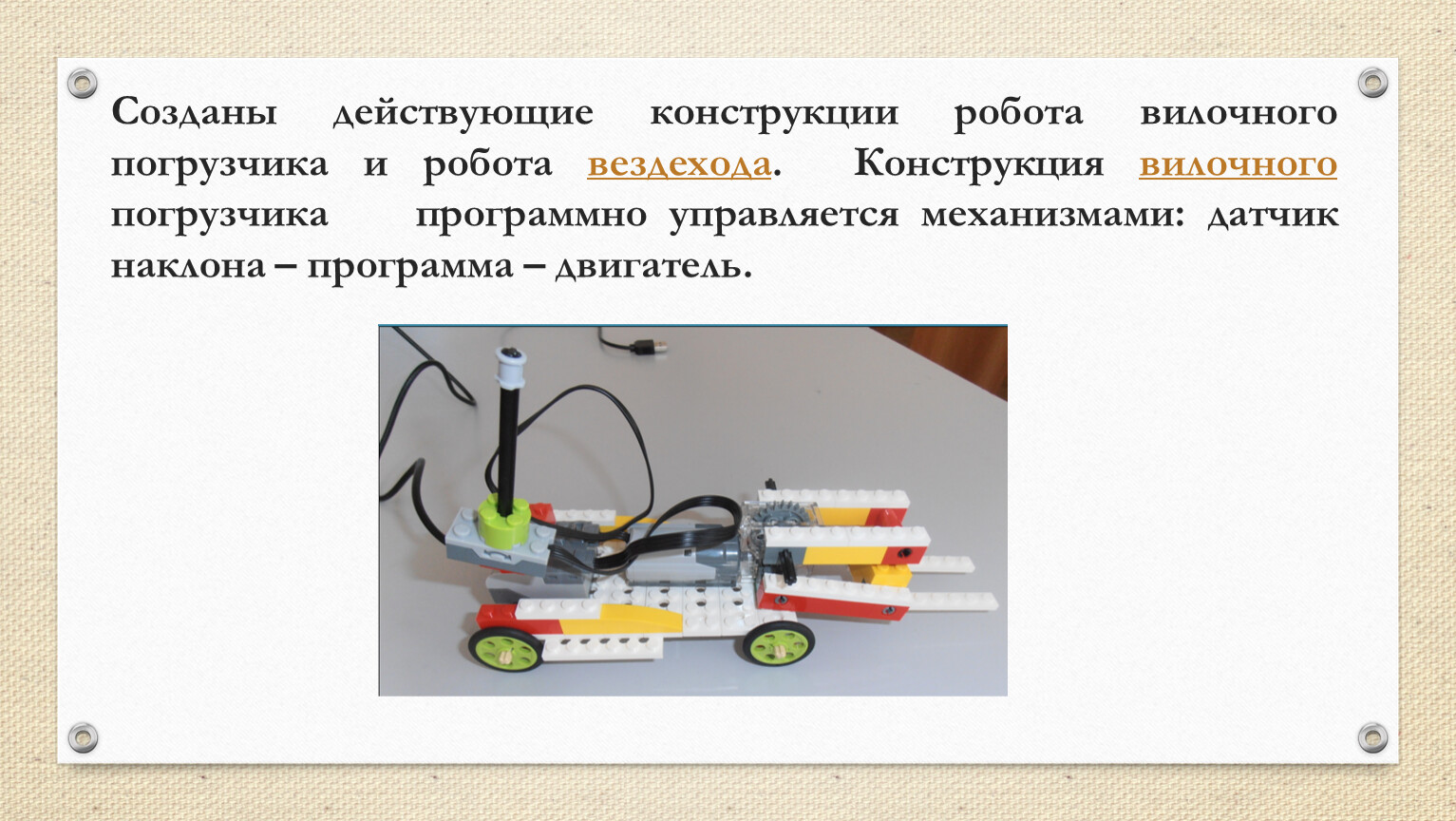
Созданы действующие конструкции робота вилочного погрузчика и робота вездехода. Конструкция вилочного погрузчика программно управляется механизмами: датчик наклона – программа – двигатель.
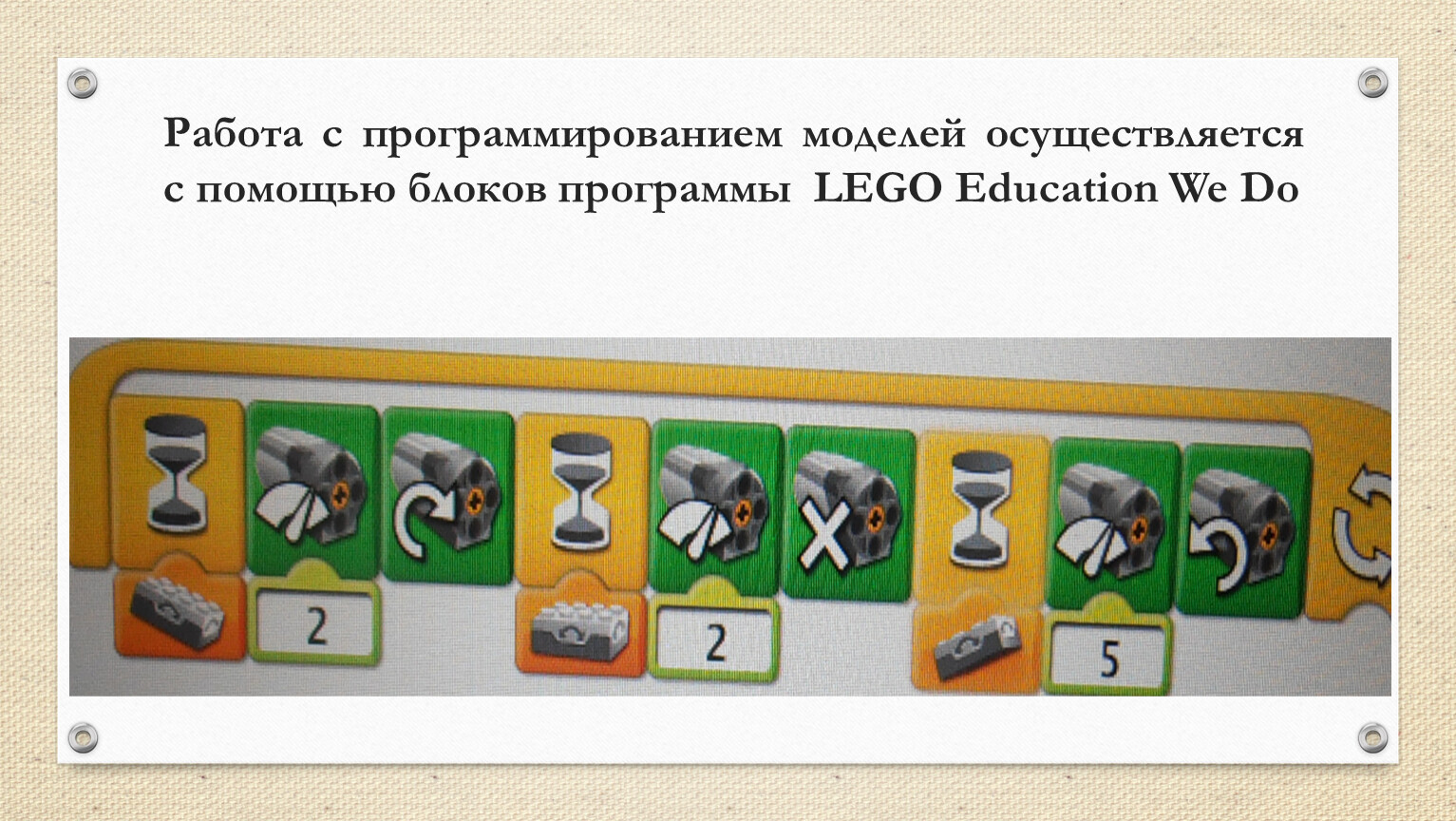
Работа с программированием моделей осуществляется с помощью блоков программы LEGO Education We Do
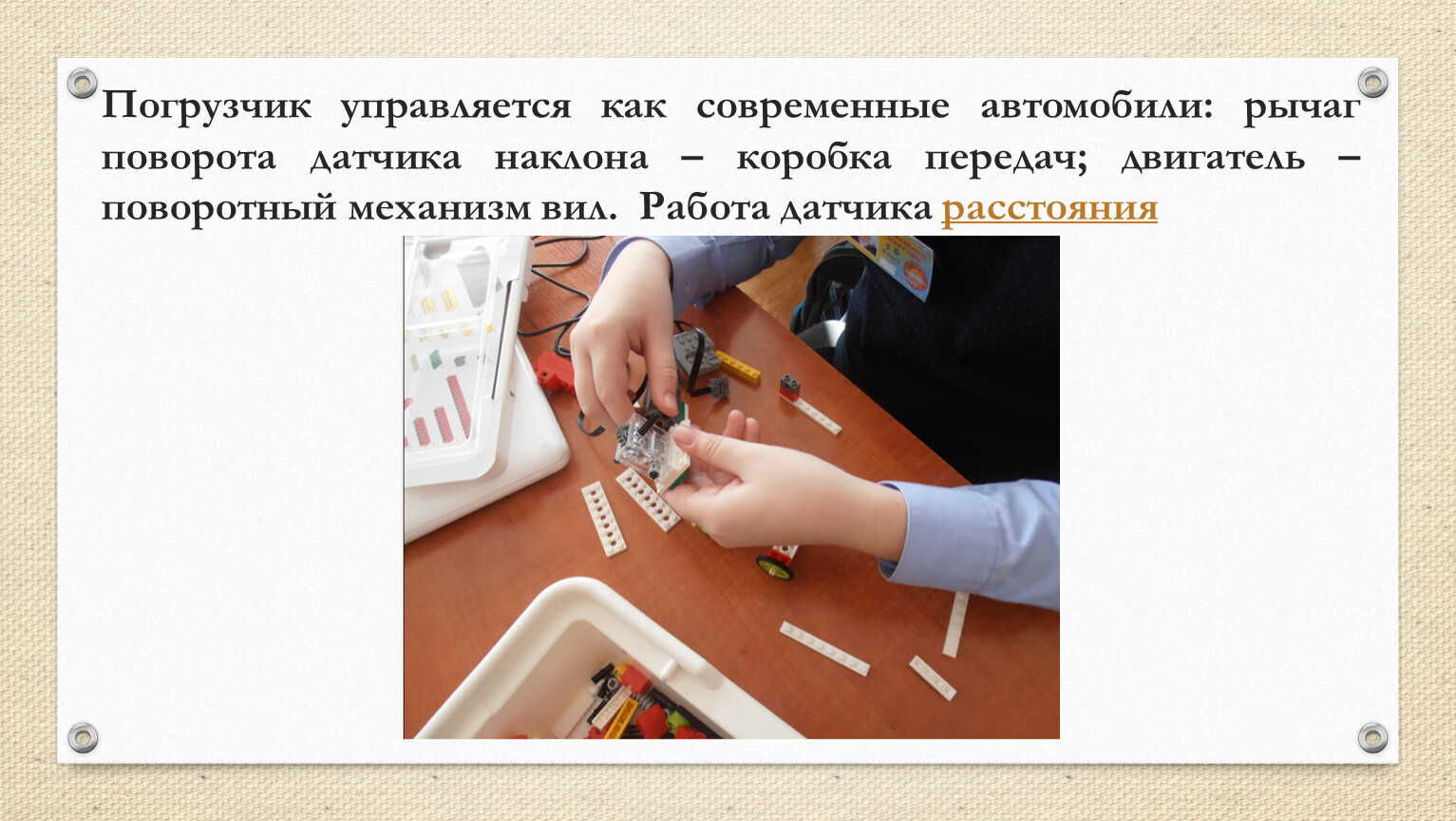
Погрузчик управляется как современные автомобили: рычаг поворота датчика наклона – коробка передач; двигатель – поворотный механизм вил. Работа датчика расстояния
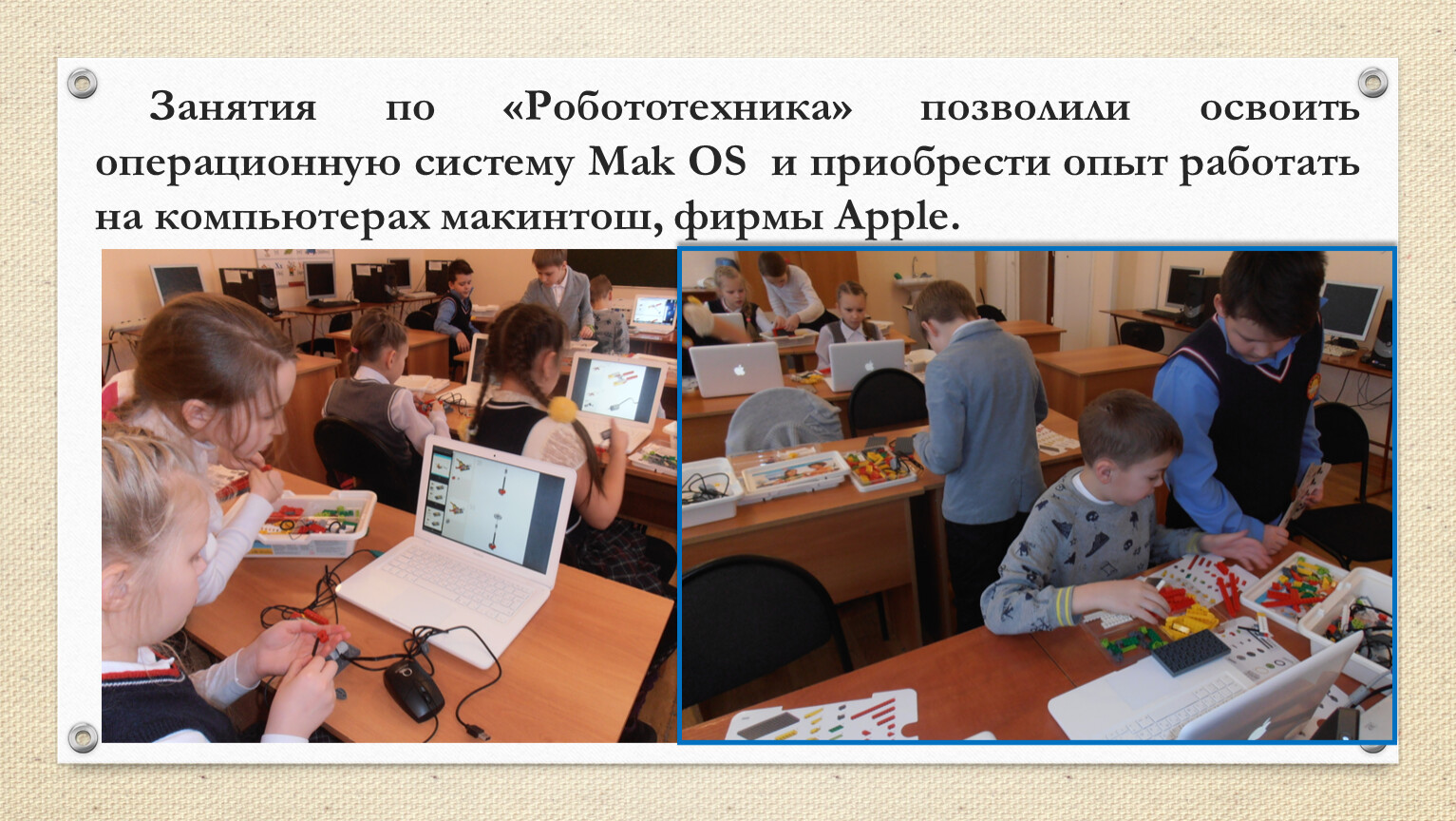
Занятия по «Робототехника» позволили освоить операционную систему Mak OS и приобрести опыт работать на компьютерах макинтош, фирмы Apple.

Юные исследователи

Рабочий момент

Спасибо за внимание!
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.