Поделиться

РАБОЧАЯ ПРОГРАММА
ВНЕУРОЧНОЙ ДЕЯТЕЛЬНОСТИ
«Робототехника»
для 5-9 класса
Составитель:
Грушко Н.В.
учитель информатики и ИКТ
Ноябрьск 2016
Рабочая программа по внеурочной деятельности «Робототехника» для 5-9 класса составлена на основе Федерального государственного образовательного стандарта основного общего образования (приказ Министерства образования и науки Российской Федерации от 17 декабря 2010г. №1897) в части организации внеурочной деятельности обучающихся.
Целью учебной программы обучение воспитанников основам робототехники, программирования. Развитие творческих способностей в процессе конструирования и проектирования.
Задачи:
Обучающие:
- дать первоначальные знания о конструкции робототехнических устройств;
- научить приемам сборки и программирования робототехнических устройств;
-сформировать общенаучные и технологические навыки конструирования и
проектирования;
- ознакомить с правилами безопасной работы с инструментами Воспитывающие:
- формировать творческое отношение к выполняемой работе;
- воспитывать умение работать в коллективе, эффективно распределять обязанности.
Развивающие:
- развивать творческую инициативу и самостоятельность;
- развивать психофизиологические качества учеников: память, внимание, способность логически мыслить, анализировать, концентрировать внимание на главном.
- Развивать умения излагать мысли в четкой логической последовательности, отстаивать свою точку зрения, анализировать ситуацию и самостоятельно находить ответы на вопросы путем логических рассуждений.
Актуальность программы заключается в том, что в настоящий момент в России развиваются нанотехнологии, электроника, механика и программирование. Т.е. созревает благодатная почва для развития компьютерных технологий и робототехники. Успехи страны в XXI веке будут определять не природные ресурсы, а уровень интеллектуального потенциала, который определяется уровнем самых передовых на сегодняшний день технологий. Уникальность образовательной робототехники заключается в возможности объединить конструирование и программирование в одном курсе, что способствует интегрированию преподавания информатики, математики, физики, черчения, естественных наук с развитием инженерного мышления, через техническое творчество. Техническое творчество — мощный инструмент синтеза знаний, закладывающий прочные основы системного мышления. Таким образом, инженерное творчество и лабораторные исследования — многогранная деятельность, которая должна стать составной частью повседневной жизни каждого обучающегося
Рабочая программа ориентирована на использование учебно-методического комплекса:
1. Лего-конструирования в школе / А.С. Злаков . – М..: БИНОМ. Лаборатория знаний, 2012г.
2. Робототехника для детей и родителей / С.А. Филипов. – Санкт-Петербург: «НАУКА». 2012г. 3. Робототехника для детей и родителей / С.А. Филипов. – Санкт-Петербург: «НАУКА».
2013г.
4. Первый шаг в робототехнику, учебник практикум для 5-6 класса /Д.Г. Копосов. – М.: БИНОМ. Лаборатория знаний 2013г.
5. Первый шаг в робототехнику, рабочая тетрадь для 5-6 класса /Д.Г. Копосов. – М.: БИНОМ. Лаборатория знаний 2013г.
Образовательная робототехника может широко использоваться при организации внеурочной деятельности, особое внимание которой уделяется в ФГОС.
Обучение по данной программе основано на принципах интеграции теоретического обучения с процессами практической, исследовательской, самостоятельной научной деятельности воспитанников и технико-технического конструирования.
Программа включает проведение лабораторно-практических, исследовательских, творческих работ и прикладного программирования. В ходе специальных заданий воспитанники приобретают общетрудовые, специальные и профессиональные умения и навыки по монтажу отдельных элементов и сборке готовых роботов, их программированию, закрепляемые в процессе разработки проекта.
Программа предназначена ознакомить обучающихся с основными понятиями, робототехники; дать практические навыки конструирования роботов промышленного и непромышленного назначения; обучить основам программирования на программном обеспечении NXT-G.
При реализации программы предполагается набор обучающихся в группы (12 человек, при работе над практическими работами обучающиеся объединяются в подгруппы по 2-3 человека) постоянного состава. Для реализации программы необходимы образовательные конструкторы LEGO: Перворобот – 9797, средний ресурсный набор – 9648.
Развитие технического творчества происходит с элементами конструирования и проектной деятельности.
Одним из основных принципов данного курса является принцип самостоятельности, который способствует формированию устойчивого познавательного интереса обучающихся, с каждым годом уровень самостоятельности увеличивается. Формы работы – творческая мастерская, она реализует принцип самостоятельности и помогает развить творческие способности.
Программой предусмотрена реализация межпредметных связей:
- математика: стандартные и нестандартные способы измерения расстояния, времени и массы, чтение показаний измерительных приборов, расчёты и обработка данных; - русский язык: обогащение словарного запаса новыми терминами; развитие монологической речи, умение излагать собственные мысли в виде доклада, реферата;
- технология: проектирование и конструирование модели, выбор деталей, необходимых для изготовления модели, соотнесение готовой модели с образцом, использование двухмерных чертежей в инструкциях для построения трехмерных моделей, приобретение навыка слаженной работы в команде;
- информатика: использование компьютерных программ Word, PowerPoint, Paint в процессе изготовления эскиза модели.
Программа рассчитана на 5 класс - 35 ч. в год (1 час в неделю), 8 класс – 35 ч. в год (1 час в неделю), 9 класс – 34ч в год (1ч в неделю)
Планируемые результаты обучения
Личностными результатами обучения робототехнике являются:
ü формирование познавательных интересов, интеллектуальных и творческих способностей обучающихся;
ü формирование целостного мировоззрения, соответствующего современному уровню развития науки и технологий;
ü самостоятельность в приобретении новых знаний и практических умений;
ü готовность к выбору жизненного пути в соответствии с собственными интересами и возможностями;
ü проявление технико-технологического мышления при организации своей деятельности;
ü мотивация образовательной деятельности школьников на основе личностно ориентированного подхода;
ü формирование ценностных отношений друг к другу, учителю, авторам открытий и изобретений, результатам обучения;
ü формирование коммуникативной компетентности в процессе проектной, учебноисследовательской, игровой деятельности.
Метапредметными результатами обучения робототехнике являются:
ü овладение составляющими исследовательской и проектной деятельности:
ü умения видеть проблему, ставить вопросы, выдвигать гипотезы, давать определения понятиям, классифицировать, наблюдать, проводить эксперименты, делать выводы и заключения, структурировать материал, объяснять, доказывать, защищать свои идеи;
ü умение самостоятельно определять цели своего обучения, ставить и формулировать для себя новые задачи в учёбе и познавательной деятельности, развивать мотивы и интересы своей познавательной деятельности;
ü овладение основами самоконтроля, самооценки, принятия решений и осуществления осознанного выбора в учебной и познавательной деятельности;
ü умение создавать, применять и преобразовывать знаки и символы, модели и схемы для решения учебных и познавательных задач;
ü развитие монологической и диалогической речи, умения выражать свои мысли, способности выслушивать собеседника, понимать его точку зрения, признавать право другого человека на иное мнение;
ü формирование умений работать в группе с выполнением различных социальных ролей, представлять и отстаивать свои взгляды и убеждения, вести дискуссию;
ü комбинирование известных алгоритмов технического и технологического творчества в ситуациях, не предполагающих стандартного применения одного из них;
ü поиск новых решений возникшей технической или организационной проблемы;
ü самостоятельная организация и выполнение различных творческих работ по созданию технических изделий;
ü виртуальное и натурное моделирование технических объектов и технологических процессов;
ü проявление инновационного подхода к решению учебных и практических задач в процессе моделирования изделия или технологического процесса;
ü выявление потребностей, проектирование и создание объектов, имеющих потребительную стоимость;
ü формирование и развитие компетентности в области использования информационнокоммуникационных технологий.
Предметными результатами обучения робототехнике являются:
ü умение использовать термины области «Робототехника»;
ü умение конструировать механизмы для преобразования движения;
ü умение конструировать модели, использующие механические передачи, редукторы;
ü умение конструировать мобильных роботов, используя различные системы передвижения; умение программировать контролер NXT и сенсорные системы;
ü умение конструировать модели промышленных роботов с различными геометрическими конфигурациями; умение составлять линейные алгоритмы управления исполнителями и записывать их на выбранном языке программирования;
ü умение использовать логические значения, операции и выражения с ними; умение формально выполнять алгоритмы, описанные с использованием конструкций ветвления (условные операторы) и повторения (циклы), вспомогательных алгоритмов, простых и табличных величин; умение создавать и выполнять программы для решения несложных алгоритмических задач в выбранной среде программирования;
ü умение использовать готовые прикладные компьютерные программы и сервисы в выбранной специализации, умение работать с описаниями программ и сервисами;
ü навыки выбора способа представления данных в зависимости от постановленной задачи;
ü рациональное использование учебной и дополнительной технической и технологической информации для проектирования и создания роботов и робототехнических систем;
ü владение алгоритмами и методами решения организационных и технических задач; владение методами чтения и способами графического представления технической, технологической и инструктивной информации;
ü применение общенаучных знаний по предметам естественнонаучного и математического цикла в процессе подготовки и осуществления технологических процессов;
ü владение формами учебно-исследовательской, проектной, игровой деятельности;
В результате изучения всех без исключения предметов на ступени основного общего образования у обучающихся будут сформированы личностные, регулятивные, познавательные и коммуникативные универсальные учебные действия как основа умения учиться.
В сфере личностных универсальных учебных действий будут сформированы внутренняя позиция обучающегося, адекватная мотивация учебной деятельности, включая учебные и познавательные мотивы, ориентация на моральные нормы и их выполнение.
В сфере регулятивных универсальных учебных действий обучающиеся овладеют всеми типами учебных действий, направленных на организацию своей работы в образовательном учреждении и вне его, включая способность принимать и сохранять учебную цель и задачу, планировать её реализацию, контролировать и оценивать свои действия, вносить соответствующие коррективы в их выполнение.
В сфере познавательных универсальных учебных действий обучающиеся научатся воспринимать и анализировать сообщения и важнейшие их компоненты - тексты, использовать знаков о -символические средства, в том числе овладеют действием моделирования, а также широким спектром логических действий и операций, включая общие приёмы решения задач.
В сфере коммуникативных универсальных учебных действий обучающиеся приобретут умения учитывать позицию собеседника (партнёра), организовывать и осуществлять сотрудничество и кооперацию с учителем и сверстниками, адекватно воспринимать и передавать информацию, отображать предметное содержание и условия деятельности в сообщениях, важнейшими компонентами которых являются тексты.
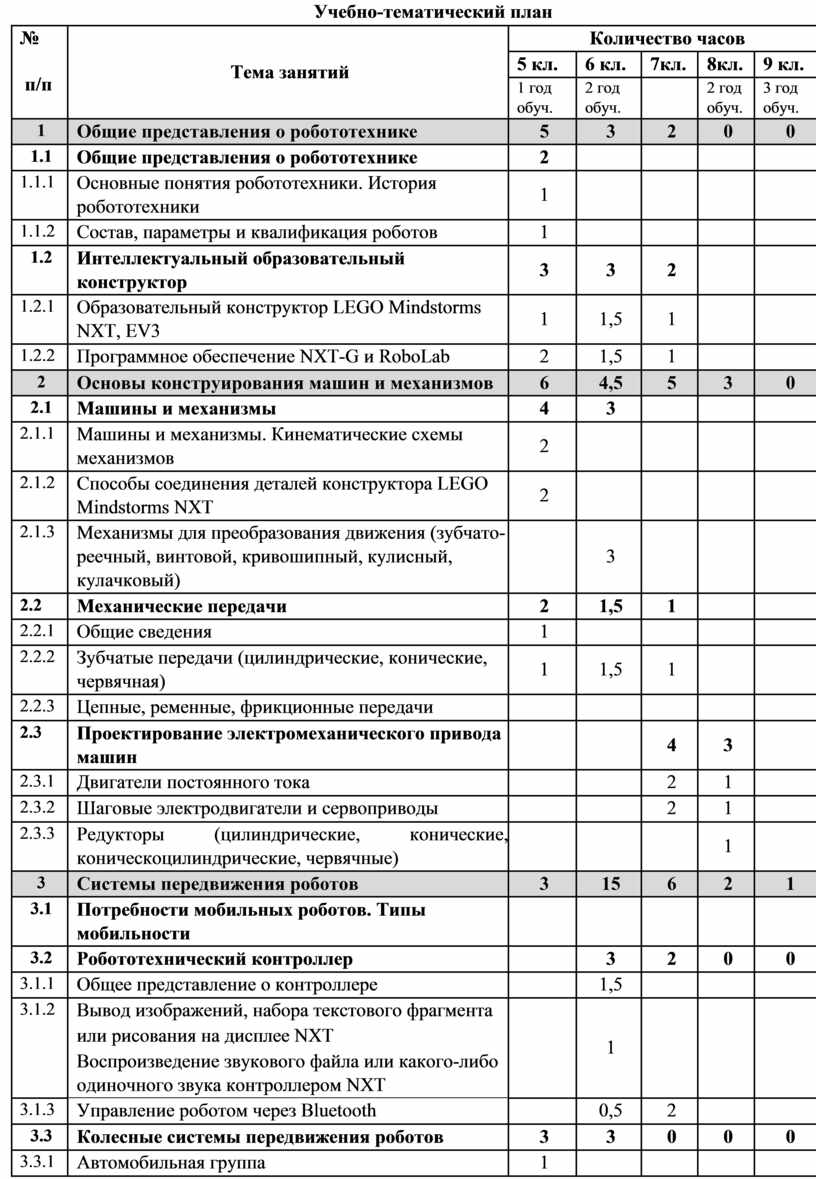
Учебно-тематический план
|
№ п/п |
Тема занятий |
Количество часов |
||||
|
5 кл. |
6 кл. |
7кл. |
8кл. |
9 кл. |
||
|
1 год обуч. |
2 год обуч. |
|
2 год обуч. |
3 год обуч. |
||
|
1 |
Общие представления о робототехнике |
5 |
3 |
2 |
0 |
0 |
|
1.1 |
Общие представления о робототехнике |
2 |
|
|
|
|
|
1.1.1 |
Основные понятия робототехники. История робототехники |
1 |
|
|
|
|
|
1.1.2 |
Состав, параметры и квалификация роботов |
1 |
|
|
|
|
|
1.2 |
Интеллектуальный образовательный конструктор |
3 |
3 |
2 |
|
|
|
1.2.1 |
Образовательный конструктор LEGO Mindstorms NXT, EV3 |
1 |
1,5 |
1 |
|
|
|
1.2.2 |
Программное обеспечение NXT-G и RoboLab |
2 |
1,5 |
1 |
|
|
|
2 |
Основы конструирования машин и механизмов |
6 |
4,5 |
5 |
3 |
0 |
|
2.1 |
Машины и механизмы |
4 |
3 |
|
|
|
|
2.1.1 |
Машины и механизмы. Кинематические схемы механизмов |
2 |
|
|
|
|
|
2.1.2 |
Способы соединения деталей конструктора LEGO Mindstorms NXT |
2 |
|
|
|
|
|
2.1.3 |
Механизмы для преобразования движения (зубчато-реечный, винтовой, кривошипный, кулисный, кулачковый) |
|
3 |
|
|
|
|
2.2 |
Механические передачи |
2 |
1,5 |
1 |
|
|
|
2.2.1 |
Общие сведения |
1 |
|
|
|
|
|
2.2.2 |
Зубчатые передачи (цилиндрические, конические, червячная) |
1 |
1,5 |
1 |
|
|
|
2.2.3 |
Цепные, ременные, фрикционные передачи |
|
|
|
|
|
|
2.3 |
Проектирование электромеханического привода машин |
|
|
4 |
3 |
|
|
2.3.1 |
Двигатели постоянного тока |
|
|
2 |
1 |
|
|
2.3.2 |
Шаговые электродвигатели и сервоприводы |
|
|
2 |
1 |
|
|
2.3.3 |
Редукторы (цилиндрические, конические, коническоцилиндрические, червячные) |
|
|
|
1 |
|
|
3 |
Системы передвижения роботов |
3 |
15 |
6 |
2 |
1 |
|
3.1 |
Потребности мобильных роботов. Типы мобильности |
|
|
|
|
|
|
3.2 |
Робототехнический контроллер |
|
3 |
2 |
0 |
0 |
|
3.1.1 |
Общее представление о контроллере |
|
1,5 |
|
|
|
|
3.1.2 |
Вывод изображений, набора текстового фрагмента или рисования на дисплее NXT Воспроизведение звукового файла или какого-либо одиночного звука контроллером NXT |
|
1 |
|
|
|
|
3.1.3 |
Управление роботом через Bluetooth |
|
0,5 |
2 |
|
|
|
3.3 |
Колесные системы передвижения роботов |
3 |
3 |
0 |
0 |
0 |
|
3.3.1 |
Автомобильная группа |
1 |
|
|
|
|
|
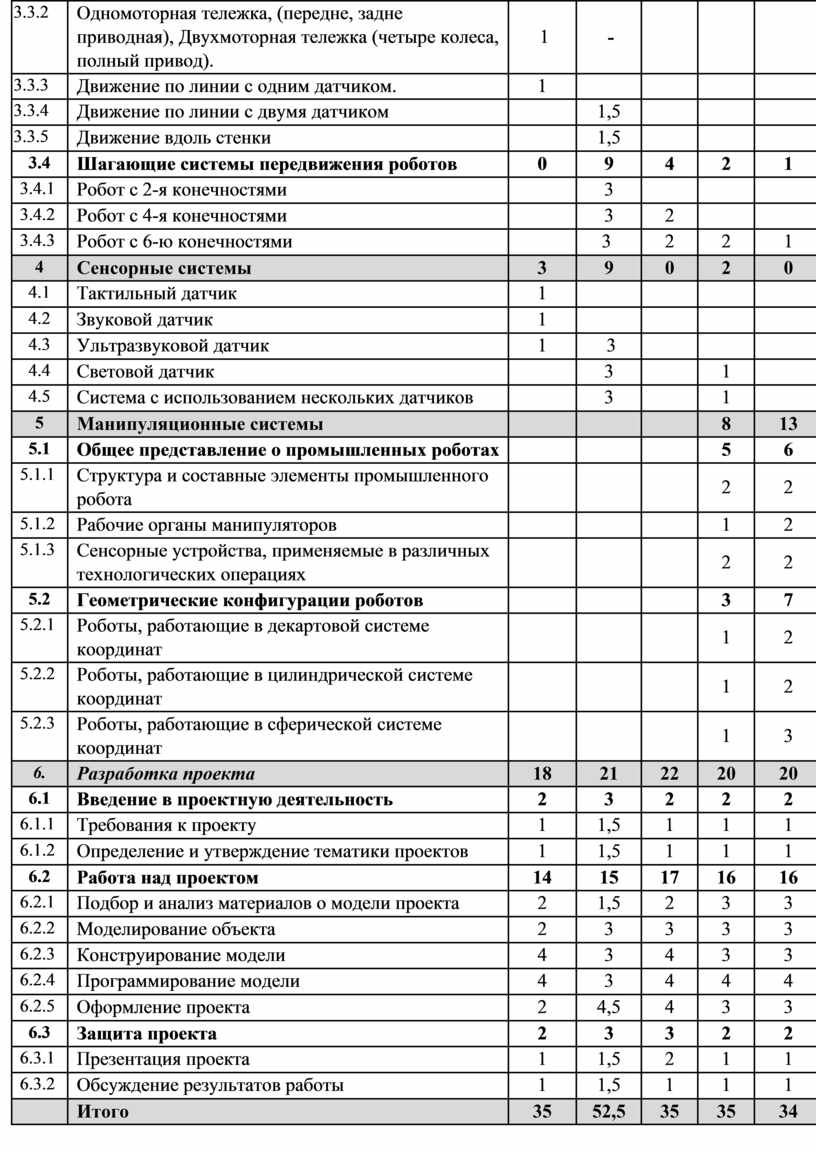
3.3.2 |
Одномоторная тележка, (передне, задне приводная), Двухмоторная тележка (четыре колеса, полный привод). |
1 |
- |
|
|
|
|
3.3.3 |
Движение по линии с одним датчиком. |
1 |
|
|
|
|
|
3.3.4 |
Движение по линии с двумя датчиком |
|
1,5 |
|
|
|
|
3.3.5 |
Движение вдоль стенки |
|
1,5 |
|
|
|
|
3.4 |
Шагающие системы передвижения роботов |
0 |
9 |
4 |
2 |
1 |
|
3.4.1 |
Робот с 2-я конечностями |
|
3 |
|
|
|
|
3.4.2 |
Робот с 4-я конечностями |
|
3 |
2 |
|
|
|
3.4.3 |
Робот с 6-ю конечностями |
|
3 |
2 |
2 |
1 |
|
4 |
Сенсорные системы |
3 |
9 |
0 |
2 |
0 |
|
4.1 |
Тактильный датчик |
1 |
|
|
|
|
|
4.2 |
Звуковой датчик |
1 |
|
|
|
|
|
4.3 |
Ультразвуковой датчик |
1 |
3 |
|
|
|
|
4.4 |
Световой датчик |
|
3 |
|
1 |
|
|
4.5 |
Система с использованием нескольких датчиков |
|
3 |
|
1 |
|
|
5 |
Манипуляционные системы |
|
|
|
8 |
13 |
|
5.1 |
Общее представление о промышленных роботах |
|
|
|
5 |
6 |
|
5.1.1 |
Структура и составные элементы промышленного робота |
|
|
|
2 |
2 |
|
5.1.2 |
Рабочие органы манипуляторов |
|
|
|
1 |
2 |
|
5.1.3 |
Сенсорные устройства, применяемые в различных технологических операциях |
|
|
|
2 |
2 |
|
5.2 |
Геометрические конфигурации роботов |
|
|
|
3 |
7 |
|
5.2.1 |
Роботы, работающие в декартовой системе координат |
|
|
|
1 |
2 |
|
5.2.2 |
Роботы, работающие в цилиндрической системе координат |
|
|
|
1 |
2 |
|
5.2.3 |
Роботы, работающие в сферической системе координат |
|
|
|
1 |
3 |
|
6. |
Разработка проекта |
18 |
21 |
22 |
20 |
20 |
|
6.1 |
Введение в проектную деятельность |
2 |
3 |
2 |
2 |
2 |
|
6.1.1 |
Требования к проекту |
1 |
1,5 |
1 |
1 |
1 |
|
6.1.2 |
Определение и утверждение тематики проектов |
1 |
1,5 |
1 |
1 |
1 |
|
6.2 |
Работа над проектом |
14 |
15 |
17 |
16 |
16 |
|
6.2.1 |
Подбор и анализ материалов о модели проекта |
2 |
1,5 |
2 |
3 |
3 |
|
6.2.2 |
Моделирование объекта |
2 |
3 |
3 |
3 |
3 |
|
6.2.3 |
Конструирование модели |
4 |
3 |
4 |
3 |
3 |
|
6.2.4 |
Программирование модели |
4 |
3 |
4 |
4 |
4 |
|
6.2.5 |
Оформление проекта |
2 |
4,5 |
4 |
3 |
3 |
|
6.3 |
Защита проекта |
2 |
3 |
3 |
2 |
2 |
|
6.3.1 |
Презентация проекта |
1 |
1,5 |
2 |
1 |
1 |
|
6.3.2 |
Обсуждение результатов работы |
1 |
1,5 |
1 |
1 |
1 |
|
|
Итого |
35 |
52,5 |
35 |
35 |
34 |
1) Общие представления о робототехнике – 9,5 ч.
Основные понятия робототехники. История робототехники. Общие представления об образовательном конструкторе LEGO Mindstorms NXT.
Общие представления о программном обеспечении NXT-G.
Практические работы:
1. Конструирование робота по технологической карте LEGO Mindstorms NXT.
2. Программирование робота с помощью элементарных команд контроллера NXT.
3. Знакомство с интерфейсом программного обеспечения NXT-G.
2) Основы конструирования машин и механизмов – 24 ч.
Машины и механизмы. Кинематические схемы механизмов. Механизмы для преобразования движения (зубчато-реечный, винтовой, кривошипный, кулисный, кулачковый). Общие представления о механических передачах. Зубчатые передачи (цилиндрические, конические, червячная). Цепные, ременные, фрикционные передачи. Двигатели постоянного тока. Шаговые электродвигатели и сервоприводы. Редукторы (цилиндрические, конические, коническо-цилиндрические, червячные). Практические работы:
1. Способы соединения деталей конструктора LEGO Mindstorms NXT.
2. Создание механизмов для преобразования движения: зубчато-реечный, винтовой, кривошипный, кулисный, кулачковый.
3. Создание моделей, использующих зубчатые (цилиндрические, конические, червячная), цепные, ременные, фрикционные передачи.
4. Создание моделей, использующих двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
5. Создание цилиндрических, конических, коническо-цилиндрических, червячных редукторов.
3) Системы передвижения роботов - 39 ч.
Потребности мобильных роботов. Типы мобильности. Колесные системы передвижения роботов: автомобильная группа, группа с произвольным независимым поворотом каждого колеса влево и вправо. Шагающие системы передвижения роботов: робот с 2-я конечностями, робот с 4-я конечностями, робот с 6-ю конечностями.
Практические работы:
1. Конструирование и программирование робота автомобильной группы.
2. Конструирование и программирование робота с произвольным независимым поворотом каждого колеса влево и вправо.
3. Конструирование и программирование робота с 2-я конечностями.
4. Конструирование и программирование робота с 4-я конечностями.
5. Конструирование и программирование робота с 6-ю конечностями. 4) Контроллер. Сенсорные системы –10 ч.
Общее представление о контроллере LEGO Mindstorms NXT. Тактильный датчик. Звуковой датчик. Ультразвуковой датчик. Световой датчик. Система с использованием нескольких датчиков. Практические работы:
1. Вывод изображений, набора текстового фрагмента или рисования на дисплее NXT.
2. Воспроизведение звукового файла или какого-либо одиночного звука контроллером NXT.
3. Управление роботом через Bluetooth.
4. Использование датчика касания для преодоления препятствий робота.
5. Действия робота на звуковые сигналы.
6. Огибание препятствий роботом при использовании ультразвукового датчика.
7. Движение робота по черной линии (используется один, два световых датчика).
8. Конструирование и программирования робота, использующего систему из нескольких датчиков. 5) Манипуляционные системы - 21 ч.
Структура и составные элементы промышленного робота. Рабочие органы манипуляторов. Сенсорные устройства, применяемые в различных технологических операциях. Геометрические конфигурации роботов: декартовая система координат, цилиндрическая система координат, сферическая система координат. Практические работы:
1. Конструирование и программирование рабочего органа манипулятора с датчиком касания.
2. Конструирование и программирование рабочего органа манипулятора со световым датчиком.
3. Конструирование и программирование рабочего органа манипулятора с ультразвуковым датчиком.
4. Конструирование и программирование промышленного робота с траекторией движения в декартовой системе координат.
5. Конструирование и программирование промышленного робота с траекторией движения цилиндрической системе координат.
6. Конструирование и программирование промышленного робота с траекторией движения в сферической системе координат.
6) Разработка проекта - 129,5 ч.
Требования к проекту. Определение и утверждение тематики проектов. Обсуждение возможных источников информации, вопросов защиты авторских прав. Алгоритм подготовки выступления.
Как выбрать содержание и стиль презентации. Практические работы:
1. Разработка плана выполнения проектной работы: формулирование цели проекта, составление графика работы над проектом.
2. Моделирование объекта.
3. Конструирование модели.
4. Программирование модели.
5. Оформление проекта.
6. Защита проекта.
Рефлексия идей технического моделирования посредством конструктора LEGO более сложных моделей
Промежуточная аттестация проводится в конце учебного года форме - «Защита проекта» Учебно- методическое и материально- техническое обеспечение
1. Злаков, А.С. Лего-конструирования в школе /А.С. Злаков– М..: БИНОМ. Лаборатория знаний, 2011
2. Филипов, С.А. Робототехника для детей и родителей / С.А. Филипов. – Санкт-Петербург: «НАУКА». 2011г.
3. Филипов, С.А. Робототехника для детей и родителей / С.А. Филипов. – Санкт-Петербург: «НАУКА». 2013г.
4. Халамов, В.Н. Образовательная робототехника во внеурочной учебной деятельности: учебно методической пособие / Челябинск: «ВЗГЛЯД», 2011г.
5. Халамов, В.Н. Образовательная робототехника в начальной школе: учебно методической пособие / Челябинск: «ВЗГЛЯД», 2011г
6. Халамов, В.Н. Образовательная робототехника на уроках информатики и физики в средней школе: учебно методической пособие/ Челябинск: «ВЗГЛЯД», 2011г
7. Лучин, Р.М. Программирование встроенных систем: от модели к роботу/ Санкт-Петербург: «НАУКА». 2011г.
8. Первый шаг в робототехнику, учебник практикум для 5-6 класса /Д.Г. Копосов. – М.: БИНОМ. Лаборатория знаний 2012г.
9. Первый шаг в робототехнику, рабочая тетрадь для 5-6 класса /Д.Г. Копосов. – М.: БИНОМ.
Лаборатория знаний 2012г.
1. http://www.legoeducation.us/ - интернет магазин Lego Education.
2. http://mindstorms.lego.com/en-us/Default.aspx - Lego Mindstorms NXT.
3. http://www.robotics.ru/ - каталог сайтов по робототехнике в России.
4. http://www.lugnet.com/ - форум пользователей LEGO Mindstorms NXT.
5. http://www.nxtprograms.com/ - примеры разработок роботов из LEGO MindstormsNXT.
6. http://wroboto.org/ - сайт международной олимпиады роботов WRO. Языки и среды программирования для LEGO Mindstorms NXT:
1. NBC/NXC: (Next Byte Codes & Not eXactly C)
1.1. Компилятор и документация к NBC: http://bricxcc.sourceforge.net/nbc/
1.2. Интегрированная среда разработки: http://bricxcc.sourceforge.net/
2. Среда LabVIEW для LEGO Mindstorms NXT: www.ni.com/mindstorms
Общие ресурсы
1. Обновления программ: http://mindstorms.lego.com/support/updates
2. NXTreme: http://mindstorms.lego.com/overview/nxtreme.aspx
3. NXTLOG: http://www.mindstorms.com/nxtlog
4. LUGNET: http://www.lugnet.com
5. MOC pages: http://www.mocpages.com
6. Brickshelf: http://www.brickshelf.com
7. Peeron LEGO Inventories: http://www.peeron.com 8. Brickset: http://www.brickset.com 9.
NXT Programs:
10. Fun Projects for your LEGO MINDSTORMS
NXT: http://www.nxtprograms.com/index.html
11. MINDSTORMS NXT Building Instructions: http://ricquin.net/lego/instructions/
12. Technica: http://isodomos.com/technica/technica.html
13. Blackbird's Technicopedia: http://www.ericalbrecht.com/technic Ресурсы для программистов
1. Which approach is best for you? NBC and NXC: http://bricxcc.sourceforge.net/nbc
2. NBC Debugger for NXT: http://www.sorosy.com/lego/nxtdbg
3. BricxCC: http://bricxcc.sourceforge.net
4. Programmable Brick Utilities: http://bricxcc.sourceforge.net/utilities.html
5. leJOS NXJ: http://lejos.sourceforge.net
6. RobotC: http://www.robotc.net
7. Writing Efficient NXT-G рrograms: http://www.firstlegoleague.org/sitemod/
8. upload/Root/WritingEfficientNXTGPrograms2.pdf
9. OnBrick NXT Remote
Control: http://www.pspwp.pwp.blueyonder.co.uk/science/robotics/nxt/
10. NXTender: http://www.tau.ac.il/~stoledo/lego/NXTender
11. NXT Programming Software: http://www.teamhassenplug.org/NXT/NXTSoftware.html Ресурсы для Bluetooth
1. MINDSTORMS Bluetooth Resources: http://www.mindstorms.com/bluetooth
2. NXTBluetoothCompatibilityList: http://www.vialist.com/users/jgarbers/
3. NXTBluetoothCompatibilityList
4. Analysis of the NXT Bluetooth-Communication
Protocol: http://www.tau.ac.il/~stoledo/lego/btperformance.html
5. D-Link: http://www.dlink.com NXT-Блоги
1. The NXT STEP: http://www.thenxtstep.com
2. nxtasy.org: http://www.nxtasy.com
3. bNXT: http://www.bnxt.com
Ресурсы по автоматизированному конструированию: (LEGO computer-aided design resources):
1. LEGO Digital Designer: http://ldd.lego.com
2. Google SketchUp NXT Parts Library: http://groups.google.com/group/
3. LegoTechnicandMindstormsNXTParts
4. Solid Modeling: http://www-education.rec.ri.cmu.edu/solidmodel
5. LDraw: http://www.ldraw.org
6. Setting up LDraw to Create Virtual NXT Robots: http://nxtblog.davidjperdue.com
7. MLCAD: http://www.lm-software.com/mlcad
8. LeoCAD: http://www.leocad.org
9. Bricksmith: http://bricksmith.sourceforge.net
10. LPub: http://www.kclague.net/LPub
11. LSynth: http://www.kclague.net/LSynth
12. L3P: http://www.hassings.dk/l3/l3p.html
13. LDView: http://ldview.sourceforge.net
14. Методы конструирования (Building techniques)
15. TECHNIC Design School: http://technic.lego.com/technicdesignschool
16. LEGO Design School: http://creator.lego.com/designschool
17. LEGO Education Constructopedia: http://www.lego.com/education/
18. default.asp?l2id=3_3&page=4_1
19. Изучаем геометрию LEGO: http://www.syngress.com/book_catalog/
20. 174_lego_robo/chapter_01.htm
21. LEGO Design: http://www.owlnet.rice.edu/~elec201/Book/legos
22. Sergei Egorov’s LEGO Geartrains: http://www.malgil.com/esl/lego/geartrains.html Образовательные Ресурсы
1. LEGO Education: http://www.legoeducation.com
2. MINDSTORMS Education NXT blog: http://www.legoeducation.com/community/
3. 9/blogs/nxt/default.aspx
4. LEGO ED West: http://www.legoedwest.com
5. LEGO Engineering: http://www.legoengineering.com
6. FIRS T LEGO League: http://www.firstlegoleague.org
7. US FIRS T Curriculum
Collection: http://www.usfirst.org/community/fll/content.aspx?id=798
8. Robotics Academy: http://www-education.rec.ri.cmu.edu
Наборы LEGO, детали LEGO и заказные детали (custom hardware)
1. LEGO Store: http://shop.lego.com
2. LEGO Education Store: http://www.legoeducation.com/store
3. BrickLink: http://www.bricklink.com
4. HiTechnic: http://www.hitechnic.com
5. Mindsensors.com: http://www.mindsensors.com
Оборудование и приборы
Аппаратные средства
1. Персональный компьютер - рабочее место учителя и обучающихся
2. Мультимедиапроектор
3. Интерактивная доска
4. Принтер
5. Источник бесперебойного питания
6. Устройства вывода звуковой информации
(наушники, колонки, микрофон)
7. Устройства для ручного ввода текстовой информации и манипулирования экранными объектами (клавиатура и мышь, джойстик)
8. Сканер
Программные средства
1. Операционная система.
2. Файловый менеджер (в составе операционной системы или др.).
3. Антивирусная программа.
4. Программа-архиватор.
5. Программы разработки анимации
6. Мультимедиа-проигрыватель (входит в состав операционных систем или др.).
7. Программа интерактивного общения.
8. Коллекция цифровых образовательных ресурсов
9. Комплекты презентационных слайдов по всем разделам курса
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.