Поделиться

Государственное автономное профессиональное образовательное учреждение
Владимирской области
«Гусь-Хрустальный технологический колледж» им. Г.Ф. Чехлова
(ГАПОУ ВО «ГХТК»)
Специальность 15.02.10 Мехатроника и мобильная робототехника
Курсовая работа
по МДК 01.02 «Технология программирования мехатронных систем»
На тему: Изучение программируемого логического контроллера GE Fanuc
 |
Гусь-Хрустальный, 2020
 СОДЕРЖАНИЕ
СОДЕРЖАНИЕ
|
ВВЕДЕНИЕ |
3 |
|
ГЛАВА 1. ОСНОВНЫЕ ПОНЯТИЯ МЕХАТРОНИКИ |
5 |
|
1.1. Определения и терминология мехатроники |
5 |
|
1.2. Принципы построения, признаки и состав мехатронных систем |
5 |
|
1.3. Языки программирования |
7 |
|
1.4. Программируемые логические контроллеры |
8 |
|
ГЛАВА 2. ИЗУЧЕНИЕ ПРОГРАММИРУЕМОГО ЛОГИЧЕСКОГО КОНТРОЛЛЕРА GE FANUC |
|
|
2.1. Основные характеристики контроллера GE Fanuc |
10 |
|
2.2. Монтаж и подключение GE Fanuc |
12 |
|
2.3. Язык программирования |
13 |
|
2.4 Набор команд |
14 |
|
2.5 Структура прикладной программы |
17 |
|
ЗАКЛЮЧЕНИЕ |
18 |
|
СПИСОК ИСТОЧНИКОВ |
20 |
ВВЕДЕНИЕ
Актуальность темы исследования обоснована тем, что логические модули GE Fanuc находят применение во всех секторах промышленного производства и системах автоматизации заданий. Они обладают высокой универсальностью и свободой в реализации алгоритмов управления. При решении простейших задач автоматизации ключевыми требованиями к компонентам являются простота работы с устройством, минимальные затраты на обслуживание и быстрота ввода в эксплуатацию.
Универсальные логические модули GE Fanuc являются компактными функционально законченными изделиями, предназначенными для построения простых программируемых устройств автоматического управления. Модули семейства GE Fanuc имеют встроенные входы и выходы, интегрированный дисплей, клавиатуру, библиотеки встроенных функций.
Дополнительно для этих логических модулей доступна широкая гамма модулей расширения, добавляющая гибкие возможности адаптации к требованиям решаемых задач. Семейство GE Fanuc ориентировано на применение во всех секторах промышленного производства и системах автоматизации зданий. Существуют также модификации для эксплуатации в стандартных и тяжелых промышленных условиях.
Цель работы – изучить основные характеристики, функции и свойства программного логического контроллера GE Fanuc.
Объект изучения: Программируемый логический контроллер GE Fanuc.
Предмет изучения: характеристики программируемого логического контроллера GE Fanuc.
Для достижения намеченной в исследовании цели ставятся следующие задачи:
· Дать определение понятию мехатроника.
· Изучить признаки построения, признаки и состав мехатронных систем.
· Ознакомиться с характеристиками GE Fanuc
· Изучить монтаж и подключение контроллера
· Изучить блоки программирования
Методологической базой для написания работы послужили общенаучные методы исследования: обобщения, анализа и синтеза, систематизации, а также изучение научной и учебной литературы, технических справочников, самоучителей, материалы различных Интернет-ресурсов.
Курсовая работа состоит из введения, двух глав, заключения и списка используемых источников. В первой главе рассказано о терминологии мехатроники, принципах построения, признаках и составах мехатронных систем, языках программирования и программируемых логических контроллерах. Во второй главе рассказано о характеристиках ПЛК GE Fanuc, Входах и выходах контроллера, монтаже, подключении и программировании GE Fanuc.
1. ОСНОВНЫЕ ПОНЯТИЯ МЕХАТРОНИКИ
1.1 Определения и терминология мехатроники
Мехатроника — область науки и техники, основанная на синергетическом объединении узлов точной механики с электронными, электротехническими и компьютерными компонентами, обеспечивающими проектирование и производство качественно новых механизмов, машин и систем с интеллектуальным управлением их функциональными движениями.
Мехатронный модуль — это функционально и конструктивно самостоятельное изделие для реализации движений с взаимопроникновением и синергетической аппаратно-программной интеграцией составляющих его элементов, имеющих различную физическую природу.
Мехатронная система — совокупность нескольких мехатронных модулей и узлов, синергетически связанных между собой, для выполнения конкретной функциональной задачи.
Мехатронные устройства — это выделившийся в последние десятилетия класс машин или узлов машин, базирующийся на использовании в них достижений точной механики, электропривода, электроники, компьютерного управления.
1.2 Принципы построения, признаки и состав мехатронных систем
Хотя все эти элементы можно встретить в громадном количестве традиционной техники, все же можно выделить ряд признаков мехатронного устройства, к которым можно отнести следующие.
1.Наличие интеграции следующих функциональных элементов:
-выходного механического звена (ВМЗ), выполняющего внешние функции мехатронного устройства;
-двигателя выходного звена с механизмом передачи движения к ВМЗ, привода ВМЗ;
-усилителя-преобразователя энергии питания двигателя (УПЭП);
-устройства цифрового программного управления приводом;
-информационной системы, контролирующей состояние внешнего мира и внутренних параметров мехатронного устройства.
2. Минимум преобразований информации и энергии (например, прямое цифровое управление безредукторным приводом) - принцип минимума преобразований.
3. Использование одного и того же элемента мехатронного устройства для реализации нескольких функций (например, параметры двигателя (ток, противо-ЭДС) используются для измерения момента и скорости) - принцип совмещения функций.
4. Проектирование функций различных элементов мехатронного устройства таким образом, чтобы цели служебного назначения изделия достигались совместным выполнением этих функций без дублирования и с максимальным эффектом (принцип синергетики).
5. Объединение корпусов узлов мехатронного устройства - принцип совмещения корпусов.
Устройство компьютерного управления осуществляет следующие основные функции:
1. Управление процессом механического движения мехатронного модуля или многомерной системы в реальном времени с обработкой сенсорной информации.
2. Организация управления функциональными движениями мехатронной системы, которая предполагает координацию управления механическим движением мехатронной системы и сопутствующими внешними процессами. Как правило, для реализации функции управления внешними процессами используются дискретные входы/выходы устройства.
3. Взаимодействие с человеком-оператором через машинный интерфейс в режимах автономного программирования (режим off-line) и непосредственно в процессе движения мехатронной системы (режим on-line).
4. Организация обмена данными с периферийными устройствами, сенсорами и другими устройствами системы.
Задачей мехатронной системы является преобразование входной информации, поступающей с верхнего уровня управления в целенаправленное механическое движение с управлением на основе принципа обратной связи. Характерно, что электрическая энергия (гидравлическая, пневматическая) используется в современных системах как промежуточная энергетическая форма.
1.3 Языки программирования
Язык программирования — формальный язык, предназначенный для записи компьютерных программ. Язык программирования определяет набор лексических, синтаксических и семантических правил, определяющих внешний вид программы и действия, которые выполнит исполнитель (обычно — ЭВМ) под управлением программы.
Со времени создания первых программируемых машин человечество придумало более восьми тысяч языков программирования (включая эзотерические, визуальные и игрушечные). Каждый год это число увеличивается. Некоторыми языками умеет пользоваться только небольшое число собственных разработчиков, другие становятся известны миллионам людей. Профессиональные программисты могут владеть десятком и более разных языков программирования.
Язык программирования предназначен для написания компьютерных программ, которые представляют собой набор правил, позволяющих компьютеру выполнить тот или иной вычислительный процесс, организовать управление различными объектами, и т.п. Язык программирования отличается от естественных языков тем, что предназначен для управления ЭВМ, в то время как естественные языки используются, прежде всего, для общения людей между собой. Большинство языков программирования использует специальные конструкции для определения и манипулирования структурами данных и управления процессом вычислений.
Как правило, язык программирования определяется не только через спецификации стандарта языка, формально определяющие его синтаксис и семантику, но и через воплощения (реализации) стандарта — программные средства, обеспечивающих трансляцию или интерпретацию программ на этом языке; такие программные средства различаются по производителю, марке и варианту (версии), времени выпуска, полноте воплощения стандарта, дополнительным возможностям; могут иметь определённые ошибки или особенности воплощения, влияющие на практику использования языка или даже на его стандарт.
1.4 Программируемые логические контроллеры
Программируемый логический контроллер (ПЛК) — специальная разновидность электронной вычислительной машины. Чаще всего ПЛК используют для автоматизации технологических процессов. В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьёзного обслуживания и практически без вмешательства человека.
Иногда на ПЛК строятся системы числового программного управления станков.
ПЛК — устройства, предназначенные для работы в системах реального времени.
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
• в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — ПЛК являются самостоятельным устройством, а не отдельной микросхемой.
• в отличие от компьютеров, ориентированных на принятие решений и управление оператором, ПЛК ориентированы на работу с машинами через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы;
• в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
В системах управления технологическими объектами логические команды, как правило, преобладают над арифметическими операциями над числами с плавающей точкой, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 разрядов), получить мощные системы, действующие в режиме реального времени. В современных ПЛК числовые операции в языках их программирования реализуются наравне с логическими. Все языки программирования ПЛК имеют лёгкий доступ к манипулированию битами в машинных словах, в отличие от большинства высокоуровневых языков программирования современных компьютеров.
2. ИЗУЧЕНИЕ ПРОГРАММИРУЕМОГО ЛОГИЧЕСКОГО КОНТРОЛЛЕРА GE FANUC
2.1 Основные характеристики контроллера GE Fanuc
Контроллеры GE Fanuc приобрели огромную популярность в мире и успешно применяются в различных отраслях благодяря высокой надежности, простоте эксплуатации и обширной номенклатуре. Контроллеры GE Fanuc характеризуются высокой надежностью. Наработка модулей на отказ составляет миллионы часов. Имеется сертификат качества ISO 9001.
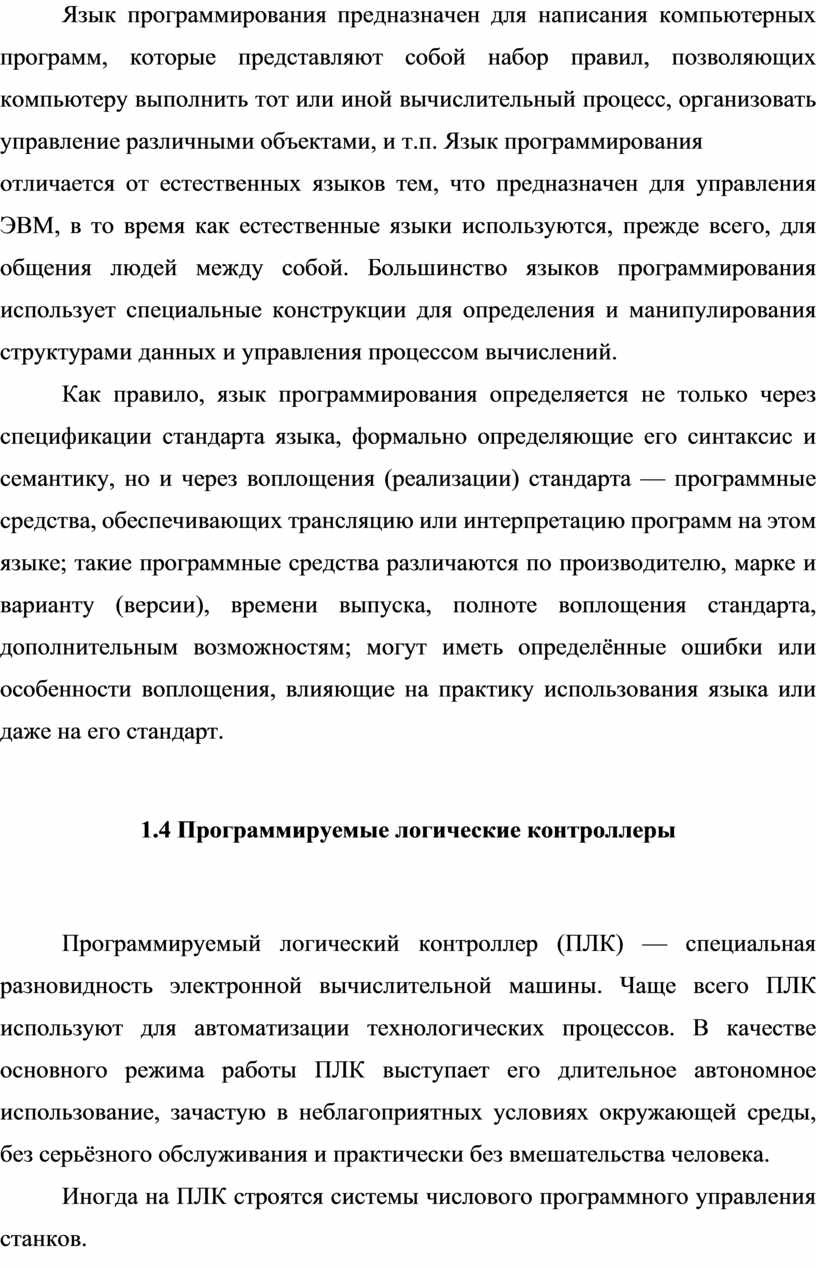
Контроллер имеет модульную структуру (Рисунок 1), что позволяет гибко подбирать конфигурацию из потребностей каждого отдельного заказчика. GE Fanuc Series 90-30 имеет в своем составе свыше 14 моделей процессора, более 100 моделей модулей ввода-вывода, коммуникационных модулей, программируемых сопроцессорных модулей и специализированных.

Рисунок 1 - GE Fanuc Series
Для создания прикладных программ и конфигурирования системы GE Fanuc предлагает программное обеспечение Logicmaster, VersaPro (Рисунок 2) и Cimplicity. Возможно программирование на "SFC" и "С".

Рисунок 2 - VersaPro
GE FANUC включает в себя:
· Коммуникационные модули
· ЦПУ
· блок питания
· Модули ввода/вывода
· интерфейс для программного модуля (плата) и кабеля PC
· Сетевой интерфейс RJ-45.
GE FANUC предлагает решения различных технических задач, в том числе в электрооборудовании жилых помещений, в коммутационных шкафах, в управлении машинами и аппаратами. GE FANUC можно использовать также для специальных систем управления в оранжереях и теплицах, для предварительной обработки сигналов управления и, при подключении коммуникационного модуля, для децентрализованного управления машинами и процессами на месте. Имеются специальные варианты без панели управления и индикации для серийных приложений в микромашиностроении, аппаратостроении и шкафах управления.
GE Fanuc тесно сотрудничает с независимыми производителями периферийных устройств, что позволяет в полной мере охватить все прикладные задачи, используя контроллеры Series 90-30. Поддерживаются сети:
· Profibus-DP(Master&Slave)
· Interbus-S(Slave)
· World FIP(Master&Slave)
· LonWorks(Master)
· DeviceNet(Master)
· SDS(Master)
· CAN Open(Master)
· Modbus RTU(Master&Slave)
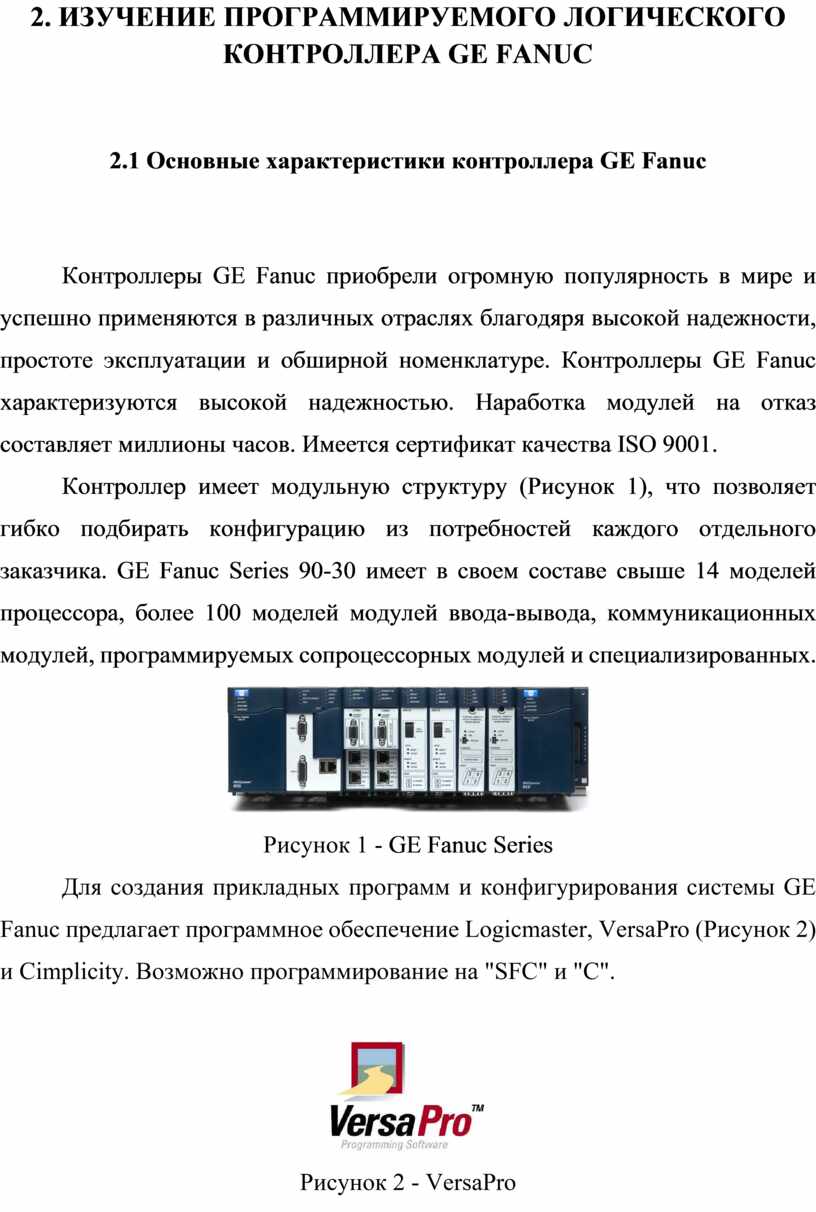
GE FANUC обеспечивает решения в диапазоне от небольших домашних установок и малых задач автоматизации до сложных инженерных задач, включающих встраивание системы шин (Рисунок 3).

![]()

![]()

Рисунок 3 – GE Fanuc
![]() Порт 1: RS-232
порт с 9-контактной розеткой типа D-sub.
Порт 1: RS-232
порт с 9-контактной розеткой типа D-sub.
![]() Порт 2: RS-485
порт с 15-контактной розеткой типа D- sub.
Порт 2: RS-485
порт с 15-контактной розеткой типа D- sub.
![]() Семь светодиодов
ЦПУ, видимые через дверцу модуля, показывают наличие питания, режим работы и
состояние ЦПУ.
Семь светодиодов
ЦПУ, видимые через дверцу модуля, показывают наличие питания, режим работы и
состояние ЦПУ.
![]() Порт сети Ethernet
поддерживает сервер SRTP и обмен данными Ethernet Global Data.
Порт сети Ethernet
поддерживает сервер SRTP и обмен данными Ethernet Global Data.
2.2 Монтаж и подключение GE Fanuc
При монтаже и подключении GE FANUC нужно придерживаться следующих указаний:
· При подключении GE FANUC обеспечьте выполнение действующих и обязательных стандартов. Также следует обратить внимание на национальные и региональные предписания при монтаже и эксплуатации устройств. Обратитесь к соответствующим властям, чтобы узнать, какие стандарты и предписания действуют в вашем конкретном случае.
· Используйте провода подходящего сечения в соответствии с величиной потребляемого тока. GE FANUC можно подключать с помощью проводов, имеющих поперечное сечение от 1,5 мм2 до 2,5 мм2.
· Не завинчивайте контакты слишком сильно. Максимальный крутящий момент равен 0,5 Нм.
· Проводку делайте как можно более короткой. Если требуются длинные провода, то должен быть использован экранированный кабель. Провода следует прокладывать парами: нейтральный или нулевой провод вместе с фазовым или сигнальным проводом.
· Прокладывайте отдельно: - цепи переменного тока - высоковольтные цепи постоянного тока с быстрыми последовательностями коммутационных операций - линии сигналов низкого напряжения.
· Обеспечьте требуемую разгрузку натяжения проводов.
· Обеспечьте надлежащую защиту от перенапряжений для проводов, уязвимых для молнии
2.3 Языки программирования
Программы создаются на языке релейно-контактной логики или на языке текстовых команд. Основная программа или подпрограммы внутри программы могут также создаваться на языке функциональных схем.
Инструментальное программное обеспечение можно использовать для создания логики обоих типов.
Язык функциональных схем (ЯФС) представляет собой графический метод изображения функций последовательной автоматизированной системы в виде последовательности шагов и переходов. Каждый шаг представляет собой команды или действия, которые либо активны, либо не активны.
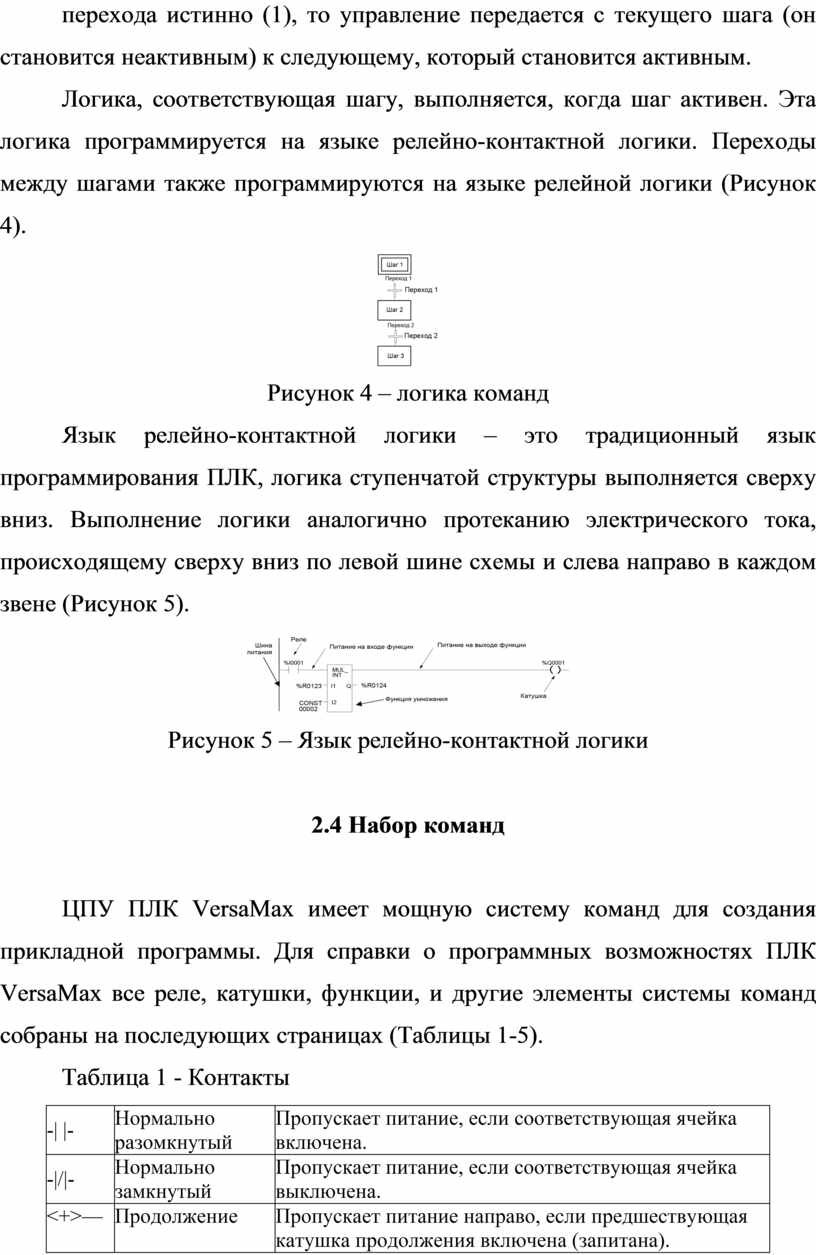
Управление передается от одного шага к другому через условные переходы, которые либо истинны (1), либо ложны (0). Если условие перехода истинно (1), то управление передается с текущего шага (он становится неактивным) к следующему, который становится активным.
Логика, соответствующая шагу, выполняется, когда шаг активен. Эта логика программируется на языке релейно-контактной логики. Переходы между шагами также программируются на языке релейной логики (Рисунок 4).
![]()
Рисунок 4 – логика команд
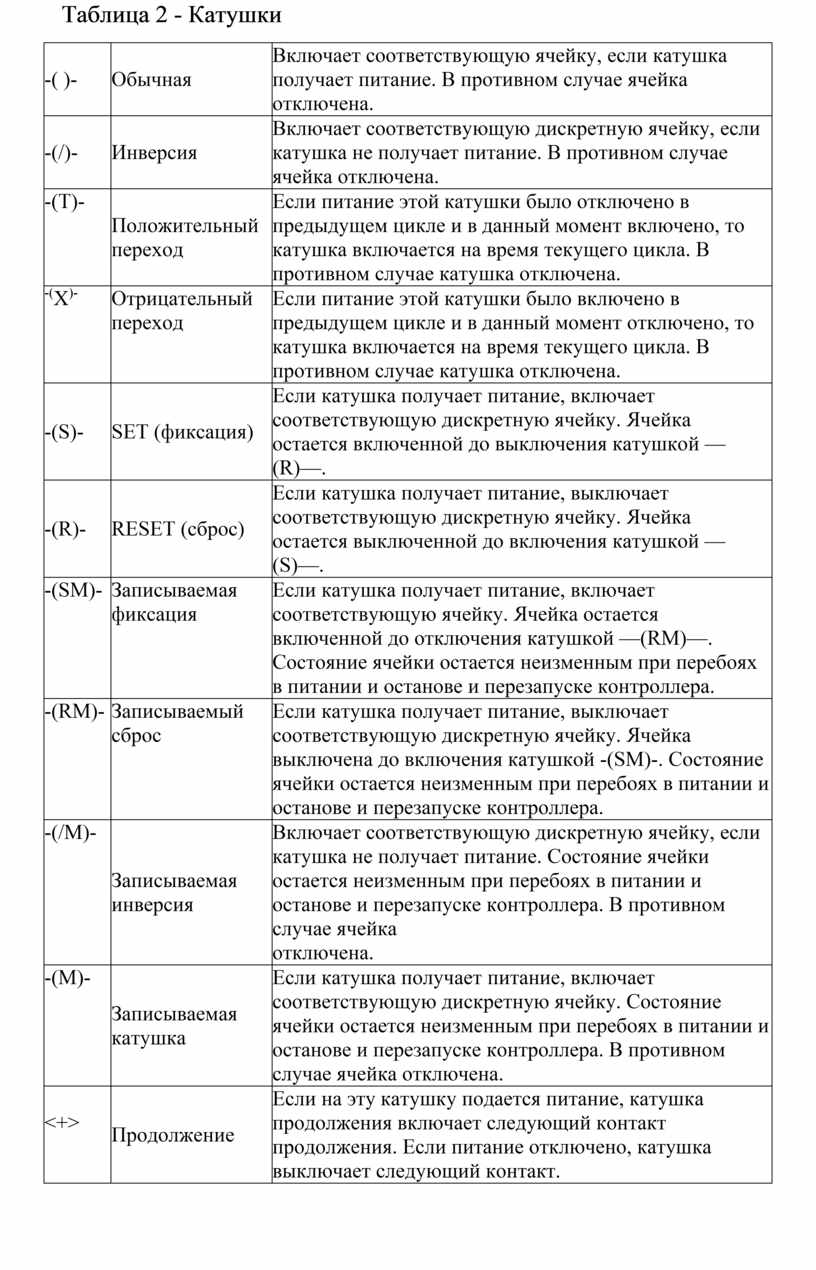
Язык релейно-контактной логики – это традиционный язык программирования ПЛК, логика ступенчатой структуры выполняется сверху вниз. Выполнение логики аналогично протеканию электрического тока, происходящему сверху вниз по левой шине схемы и слева направо в каждом звене (Рисунок 5).

Рисунок 5 – Язык релейно-контактной логики
2.4 Набор команд
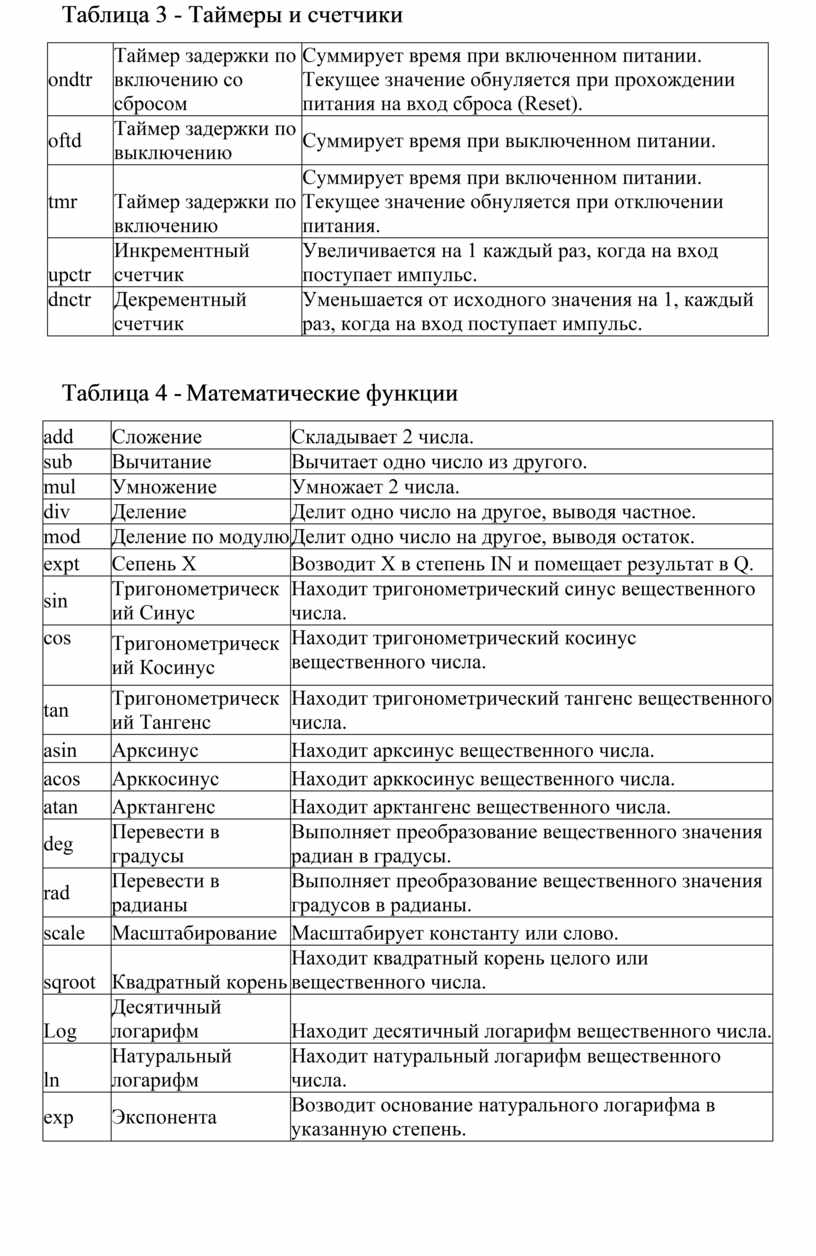
ЦПУ ПЛК VersaMax имеет мощную систему команд для создания прикладной программы. Для справки о программных возможностях ПЛК VersaMax все реле, катушки, функции, и другие элементы системы команд собраны на последующих страницах (Таблицы 1-5).
Таблица 1 - Контакты
|
-| |- |
Нормально разомкнутый |
Пропускает питание, если соответствующая ячейка включена. |
|
-|/|- |
Нормально замкнутый |
Пропускает питание, если соответствующая ячейка выключена. |
|
<+>— |
Продолжение |
Пропускает питание направо, если предшествующая катушка продолжения включена (запитана). |
Таблица 2 - Катушки
|
-( )- |
Обычная |
Включает соответствующую ячейку, если катушка получает питание. В противном случае ячейка отключена. |
|
-(/)- |
Инверсия |
Включает соответствующую дискретную ячейку, если катушка не получает питание. В противном случае ячейка отключена. |
|
-(Т)- |
Положительный переход |
Если питание этой катушки было отключено в предыдущем цикле и в данный момент включено, то катушка включается на время текущего цикла. В противном случае катушка отключена. |
|
-(Х)- |
Отрицательный переход |
Если питание этой катушки было включено в предыдущем цикле и в данный момент отключено, то катушка включается на время текущего цикла. В противном случае катушка отключена. |
|
-(S)- |
SET (фиксация) |
Если катушка получает питание, включает соответствующую дискретную ячейку. Ячейка остается включенной до выключения катушкой —(R)—. |
|
-(R)- |
RESET (сброс) |
Если катушка получает питание, выключает соответствующую дискретную ячейку. Ячейка остается выключенной до включения катушкой —(S)—. |
|
-(SM)- |
Записываемая фиксация |
Если катушка получает питание, включает соответствующую ячейку. Ячейка остается включенной до отключения катушкой —(RM)—. Состояние ячейки остается неизменным при перебоях в питании и останове и перезапуске контроллера. |
|
-(RM)- |
Записываемый сброс |
Если катушка получает питание, выключает соответствующую дискретную ячейку. Ячейка выключена до включения катушкой -(SM)-. Состояние ячейки остается неизменным при перебоях в питании и останове и перезапуске контроллера. |
|
-(/M)- |
Записываемая инверсия |
Включает соответствующую дискретную ячейку, если катушка не получает питание. Состояние ячейки остается неизменным при перебоях в питании и останове и перезапуске контроллера. В противном случае ячейка отключена. |
|
-(M)- |
Записываемая катушка |
Если катушка получает питание, включает соответствующую дискретную ячейку. Состояние ячейки остается неизменным при перебоях в питании и останове и перезапуске контроллера. В противном случае ячейка отключена. |
|
<+> |
Продолжение |
Если на эту катушку подается питание, катушка продолжения включает следующий контакт продолжения. Если питание отключено, катушка выключает следующий контакт. |
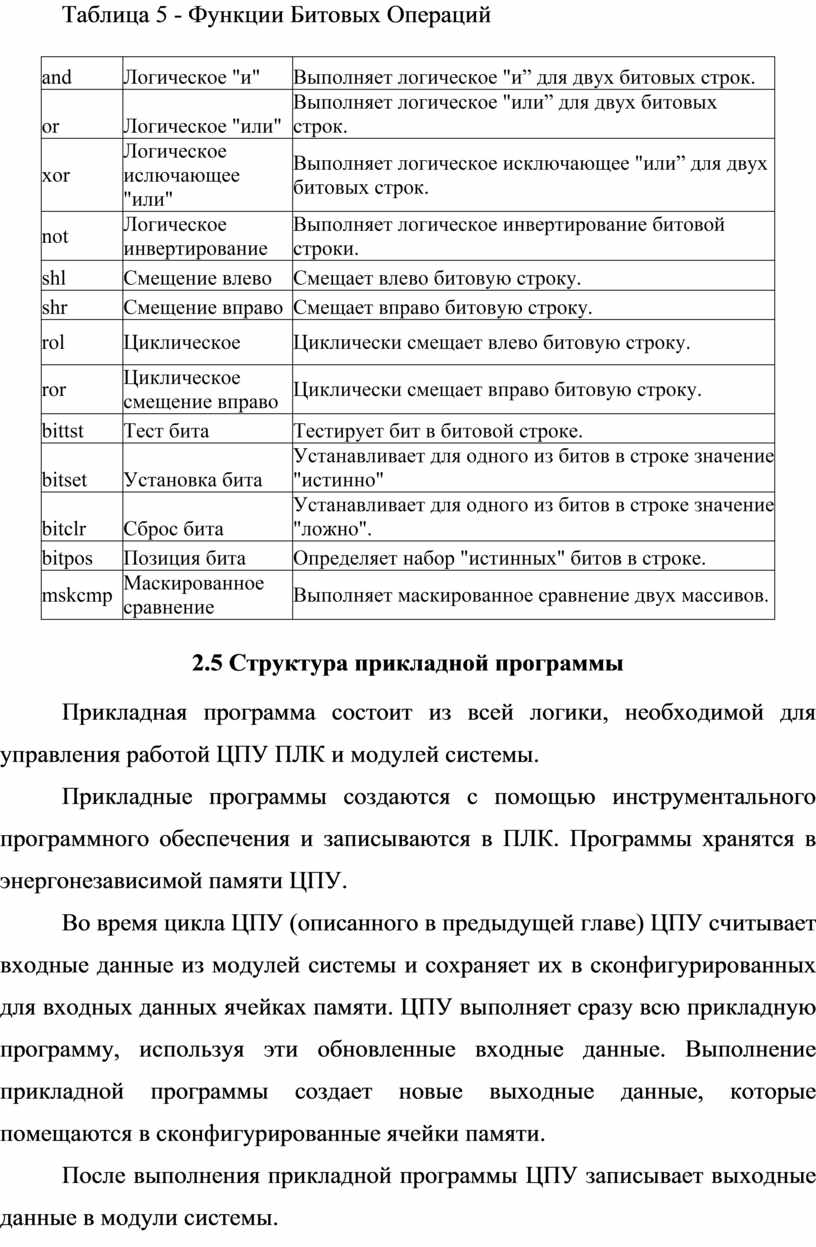
Таблица 3 - Таймеры и счетчики
|
ondtr |
Таймер задержки по включению со сбросом |
Суммирует время при включенном питании. Текущее значение обнуляется при прохождении питания на вход сброса (Reset). |
|
oftd |
Таймер задержки по выключению |
Суммирует время при выключенном питании. |
|
tmr |
Таймер задержки по включению |
Суммирует время при включенном питании. Текущее значение обнуляется при отключении питания. |
|
upctr |
Инкрементный счетчик |
Увеличивается на 1 каждый раз, когда на вход поступает импульс. |
|
dnctr |
Декрементный счетчик |
Уменьшается от исходного значения на 1, каждый раз, когда на вход поступает импульс. |
Таблица 4 - Математические функции
|
add |
Сложение |
Складывает 2 числа. |
|
sub |
Вычитание |
Вычитает одно число из другого. |
|
mul |
Умножение |
Умножает 2 числа. |
|
div |
Деление |
Делит одно число на другое, выводя частное. |
|
mod |
Деление по модулю |
Делит одно число на другое, выводя остаток. |
|
expt |
Сепень Х |
Возводит X в степень IN и помещает результат в Q. |
|
sin |
Тригонометрический Синус |
Находит тригонометрический синус вещественного числа. |
|
cos |
Тригонометрический Косинус |
Находит тригонометрический косинус вещественного числа. |
|
tan |
Тригонометрический Тангенс |
Находит тригонометрический тангенс вещественного числа. |
|
asin |
Арксинус |
Находит арксинус вещественного числа. |
|
acos |
Арккосинус |
Находит арккосинус вещественного числа. |
|
atan |
Арктангенс |
Находит арктангенс вещественного числа. |
|
deg |
Перевести в градусы |
Выполняет преобразование вещественного значения радиан в градусы. |
|
rad |
Перевести в радианы |
Выполняет преобразование вещественного значения градусов в радианы. |
|
scale |
Масштабирование |
Масштабирует константу или слово. |
|
sqroot |
Квадратный корень |
Находит квадратный корень целого или вещественного числа. |
|
Log |
Десятичный логарифм |
Находит десятичный логарифм вещественного числа. |
|
ln |
Натуральный логарифм |
Находит натуральный логарифм вещественного числа. |
|
exp |
Экспонента |
Возводит основание натурального логарифма в указанную степень. |
Таблица 5 - Функции Битовых Операций
|
and |
Логическое "и" |
Выполняет логическое "и” для двух битовых строк. |
|
or |
Логическое "или" |
Выполняет логическое "или” для двух битовых строк. |
|
xor |
Логическое ислючающее "или" |
Выполняет логическое исключающее "или” для двух битовых строк. |
|
not |
Логическое инвертирование |
Выполняет логическое инвертирование битовой строки. |
|
shl |
Смещение влево |
Смещает влево битовую строку. |
|
shr |
Смещение вправо |
Смещает вправо битовую строку. |
|
rol |
Циклическое |
Циклически смещает влево битовую строку. |
|
ror |
Циклическое смещение вправо |
Циклически смещает вправо битовую строку. |
|
bittst |
Тест бита |
Тестирует бит в битовой строке. |
|
bitset |
Установка бита |
Устанавливает для одного из битов в строке значение "истинно" |
|
bitclr |
Сброс бита |
Устанавливает для одного из битов в строке значение "ложно". |
|
bitpos |
Позиция бита |
Определяет набор "истинных" битов в строке. |
|
mskcmp |
Маскированное сравнение |
Выполняет маскированное сравнение двух массивов. |
2.5 Структура прикладной программы
Прикладная программа состоит из всей логики, необходимой для управления работой ЦПУ ПЛК и модулей системы.
Прикладные программы создаются с помощью инструментального программного обеспечения и записываются в ПЛК. Программы хранятся в энергонезависимой памяти ЦПУ.
Во время цикла ЦПУ (описанного в предыдущей главе) ЦПУ считывает входные данные из модулей системы и сохраняет их в сконфигурированных для входных данных ячейках памяти. ЦПУ выполняет сразу всю прикладную программу, используя эти обновленные входные данные. Выполнение прикладной программы создает новые выходные данные, которые помещаются в сконфигурированные ячейки памяти.
После выполнения
прикладной программы ЦПУ записывает выходные данные в модули системы.
ЗАКЛЮЧЕНИЕ
Актуальность темы исследования обоснована тем, что логические модули GE Fanuc находят применение во всех секторах промышленного производства и системах автоматизации заданий. Они обладают высокой универсальностью и свободой в реализации алгоритмов управления. При решении простейших задач автоматизации ключевыми требованиями к компонентам являются простота работы с устройством, минимальные затраты на обслуживание и быстрота ввода в эксплуатацию.
Универсальные логические модули GE Fanuc являются компактными функционально законченными изделиями, предназначенными для построения простых программируемых устройств автоматического управления. Модули семейства GE Fanuc имеют встроенные входы и выходы, интегрированный дисплей, клавиатуру, библиотеки встроенных функций.
Дополнительно для этих логических модулей доступна широкая гамма модулей расширения, добавляющая гибкие возможности адаптации к требованиям решаемых задач. Семейство GE Fanuc ориентировано на применение во всех секторах промышленного производства и системах автоматизации зданий. Существуют также модификации для эксплуатации в стандартных и тяжелых промышленных условиях.
Целью данной работы было выбрано изучение основных характеристик, функций и свойств программного логического контроллера GE Fanuc.
Объектом изучения являлся программируемый логический контроллер GE Fanuc.
Предметом изучения: характеристики программируемого логического контроллера GE Fanuc.
Для достижения намеченной в исследовании цели выполнены следующие задачи:
· Дано определение понятию мехатроника.
· Изучены признаки построения, признаки и состав мехатронных систем.
· Произведено ознакомление с характеристиками GE Fanuc
· Изучены монтаж и подключение контроллера
· Изучены блоки программирования
Методологической базой для написания работы послужили общенаучные методы исследования: обобщения, анализа и синтеза, систематизации, а также изучение научной и учебной литературы, технических справочников, самоучителей, материалы различных Интернет-ресурсов.
Курсовая работа состоит из введения, двух глав, заключения и списка используемых источников. В первой главе рассказано о терминологии мехатроники, принципах построения, признаках и составах мехатронных систем, языках программирования и программируемых логических контроллерах. Во второй главе рассказано о характеристиках ПЛК GE Fanuc, Входах и выходах контроллера, монтаже, подключении и программировании GE Fanuc.
СПИСОК ИСТОЧНИКОВ
1. GE Fanuc десять лет спустя [Электронный ресурс]. Режим доступа: https://habr.com/ - Заглавие с экрана. – (Дата обращения: 14.04.2020).
2. SIEMENS [Электронный ресурс] Режим доступа: https://www.siemens-pro.ru - Заглавие с экрана. – (Дата обращения: 10.02.2020).
3. Siemens GE Fanuc [Электронный ресурс]. Режим доступа: https://ru.wikipedia.org/wiki/Siemens_GE Fanuc – Заглавие с экрана. – (Дата обращения: 10.03.2020).
4. Логические модули GE FANUC [Электронный ресурс]. Режим доступа: https://www.siemens-ru.com – Заглавие с экрана. – (Дата обращения: 14.04.2020).
5. Логические реле GE Fanuc, часть 1: Устройство и подключение [Электронный ресурс]. Режим доступа: http://cs-cs.net – Заглавие с экрана. – (Дата обращения: 01.05.2020).
6. Логический контроллер Siemens GE FANUC [Электронный ресурс]. Режим доступа: https://gazovik-teplo.ru – Заглавие с экрана. – (Дата обращения: 14.04.2020).
7. Логическое реле GE Fanuc, часть 2: Программирование в GE Fanuc Soft Comfort [Электронный ресурс]. Режим доступа: https://cs-cs.net/ - Заглавие с экрана. – (Дата обращения: 14.04.2020).
8. Мехатроника [Электронный ресурс]. Режим доступа: https://bigenc.ru - Заглавие с экрана. – (Дата обращения: 10.03.2020).
9. Мехатроника [Электронный ресурс]. Режим доступа: https://ru.wikipedia.org – Заглавие с экрана. – (Дата обращения: 5.05.2020).
10. Обзор Siemens GE Fanuc [Электронный ресурс]. Режим доступа: https://promspecrele.ru – Заглавие с экрана. – (Дата обращения: 10.03.2020).
11. Программирование GE FANUC Siemens [Электронный ресурс]. Режим доступа: http://alma-engineering.ru/ - Заглавие с экрана. – (Дата обращения: 13.04.2020).
12. Программируемый логический контроллер [Электронный ресурс]. Режим доступа: https://ru.wikipedia.org - Заглавие с экрана. – (Дата обращения: 13.04.2020).
13. Установка и подключение базовых модулей GE FANUC [Электронный ресурс]. Режим доступа: https://www.mege.ru/ - Заглавие с экрана. – (Дата обращения: 13.04.2020).
14. Что такое мехатроника [Электронный ресурс]. Режим доступа: http://electricalschool.info - Заглавие с экрана. – (Дата обращения: 10.03.2020).
15. Язык программирования [Электронный ресурс]. Режим доступа: https://ru.wikipedia.org - Заглавие с экрана. – (Дата обращения: 13.04.2020).
Скачано с www.znanio.ru


![Программирование GE FANUC Siemens [Электронный ресурс]](https://fs.znanio.ru/d5af0e/85/d6/d7aa9e0845cf1768ce327c8b6da40427bf.jpg)
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.