

ЮЖНО-УРАЛЬСКАЯ ИНТЕЛЛЕКТУАЛЬНО-СОЦИАЛЬНАЯ ПРОГРАММА
ДЛЯ МОЛОДЕЖИ И ШКОЛЬНИКОВ "ШАГ В БУДУЩЕЕ - СОЗВЕЗДИЕ НТТМ"
----------------------------------------
ЮЖНО-УРАЛЬСКИЙ ГОЛОВНОЙ КООРДИНАЦИОННЫЙ ЦЕНТР НТТМ
«ИНТЕЛЛЕКТУАЛЫ XXI ВЕКА»
Автоматическая кормушка для кота
(для жидкого корма)
Исследовательская (творческая) работа на Южно-Уральский
молодежный интеллектуальный форум "Шаг в будущее-Созвездие НТТМ"
(секция 1.4 «Машиностроение, аэрокосмонавтика, металлургия, системы вооружения; техника и технологии, нанотехнологии»)
Автор:
Новоселов Михаил Ильич,
Челябинская область, г.Кыштым, МОУ ДО ЦД(Ю)ТТ класс 6
Научный руководитель:
Внучков Сергей Дмитриевич,
преподаватель МОУ ДО ЦД(Ю)ТТ
Челябинск – 2019
Содержание
• Введение
• Цели
• Задачи
• Основное содержание
• Плюсы и минусы данного устройства
• Выводы
• Дальнейшее развитие проекта
• Список литераты
• Приложения
Введение
У нашей современной жизни очень быстрый темп, мы все время торопимся и куда-то бежим, на учебу, работу и так далее. Зачастую мы не находимся дома по 12 часов в день, а у многих из нас есть любимые домашние питомцы которых надо кормить. Так как мы живем в 21 веке, веке новых технологий и высокого уровня автоматизации я подумал над автоматизацией кормления домашних животных, ведь они не виноваты в том что у нас нет возможности всегда приходить вовремя.
Сама идея проекта «Автоматическая кормушка для кота (для жидкого корма)» возникла у меня тогда, когда я и моя мама поехали в отпуск. Дома у нас живут один кот и две кошки. Пока мы были в отпуске их кормила бабушка с дедушкой. А если допустить, что они тоже решили бы поехать вместе с нами в отпуск, тогда кошек некому было бы кормить. А отдохнуть вместе с семьей хочется. И тогда я стал думать над будущим проектом.
Я опросил друзей и одноклассников есть ли у них подобная проблема чтобы понять насколько эта проблема актуальна. Я опросил 50 человек у которых дома живут домашние животные и выяснилось:
На вопрос о том кормят ли они своего питомца вовремя?
• Отрицательно, 66%
• Положительно 34%
На вопрос нужно ли устройство для автоматического кормления?
• Отрицательно, 0%
• Положительно100%
Таким образом я понял что данное устройство актуально .
Цель проекта
Цель моего проекта- создать устройство которое будет автоматически кормить домашнее животное по времени
Задачи проекта
1: Найти в интернете похожие устройства
2: Придумать свое устройство с учетом недостатков имеющихся
3: Собрать свое устройство
Основное содержание
Первым делом я начал искать в интернете автоматические кормушки для животных, таких предложений оказалось довольно много, однако они все имели один критический недостаток: все они работали только с сухим кормом.
Также в интернете я узнал что в современном мире люди все чаще отказываются от сухого корма в пользу жидкого
Таким образом я понял что надо сделать кормушку именно для жидкого корма из пакетиков т.к. многие животные не едят сухой корм( например мои коты ,которых у меня 3)
.
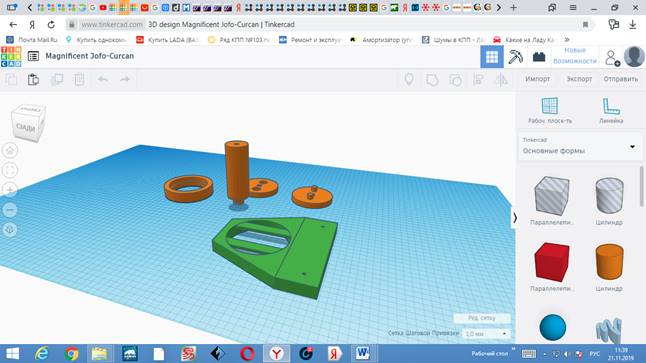
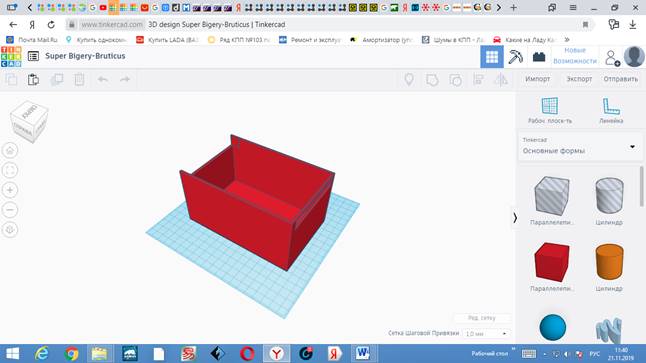
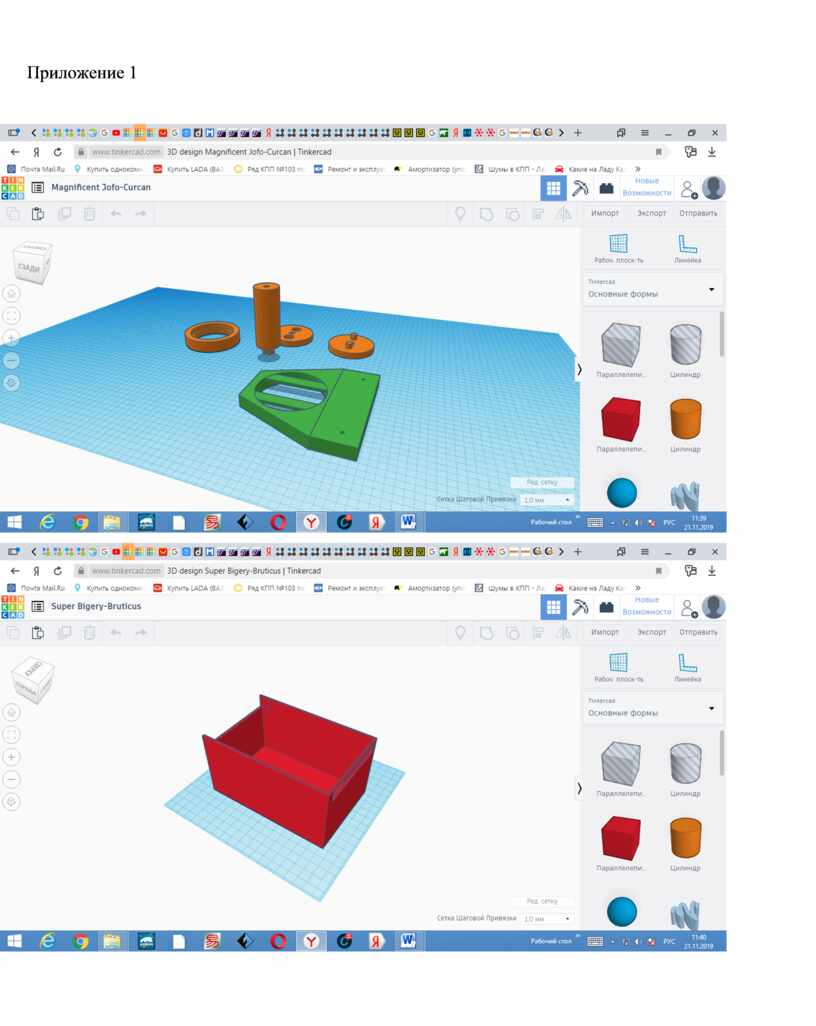
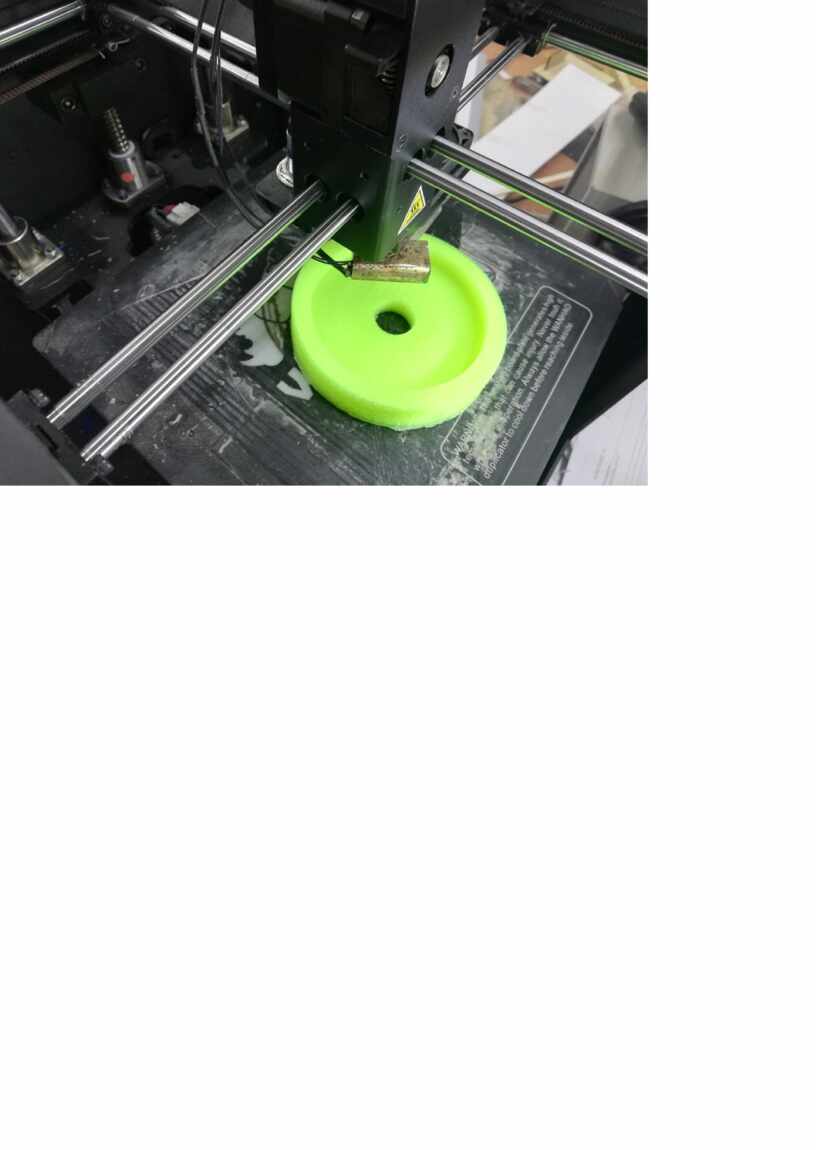
И я начал разрабатывать чертежи. После окончания чертежей начал реализовывать свой проект. Первым делом я решил заняться корпусом. Корпус у меня составной. Сначала я в программе для 3д дизайна tinkercad нарисовал 3д объекты которые в последствии напечатал на 3д принтере(приложение 1).
Далее пришло время задуматься над системой управления и управляющей программой .
Вся система будет работать на основе микроконтроллера arduino uno.
Общая логическая схема выглядит так:
Из отсека в котором располагается корм, в назначенное время, посредством 9 граммового сервопривода будет выталкиваться пакетик с кормом напрямую в валы, валы в это время поджимают пакетик, сами валы крутятся от сервопривода mg 996r это мощный сервопривод с вращением на 360 градусов.
Сами валы закреплены на проворачивающейся платформе(приложение 2).
Зацепив пакетик платформа на которой крепятся валя проворачивается тема самым перетаскивая пакетик с кормом, в процессе движения пакетик проходит через механизм отрезания и с него срезается отрывная часть . далее валы начинают прокручиваться тем самым выдавливая пакетик с кормом в миску которая находится под нашим устройством, а пустой пакетик падает в мусорный отсек.
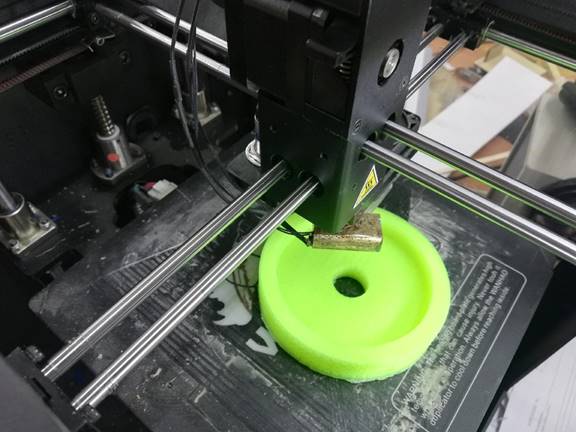
Выбор материалов для печати на 3д принтере получился такой:
Корпус и все держатели были напечатаны ABS пластиком т.к. нам необходима механическая прочность для этих частей конструкции, а валы были напечатаны SBS пластиком т.к. он самый гибкий.
ABS может принимать много разных полимерных форм, ему можно придать множество самых разных свойств. В целом, это прочный и несколько более податливый по сравнению с PLA пластик. Натуральный ABS имеет до окраски бежеватый (молочный) оттенок. Пластичность ABS позволяет легко создавать элементы различных соединений и крепежа. Он легко шлифуется и обрабатывается. Важно отметить, что ABS растворяется в ацетоне, что позволяет склеивать детали и добиваться очень гладкой поверхности
SBS Прочность, пластичность и термостойкость делают из него материал, которому часто отдается предпочтение в инженерных и механических приложениях. Модуль упругости гораздо меньше, чем у ABS. То есть, напечатанные детали получаются более гибкими. Удлинение при разрыве >250%. Нить, в отличие от ABS, не ломается, не говоря о PLA, который наиболее хрупкий из рассматриваемых материалов. SBS имеет гибкую структуру. Он не обломится и не оборвется при печати. Даже если пруток в ваш экструдер подается под углом в 90 градусов! Материал прозрачен (93% светопропускания). Окрашивание материала дает очень красивый эффект.Обрабатывается и растворяется Лимоненом, Дихлорметаном, сольвентом. SBS идеально подходит для печати плафонов светильников, прототипов прозрачной посуды, бутылок и т.д.
Самой большой проблемой стало открытие пакетика, изначально было предложено 3 метода
1- открытие при помощи перемещающейся в продольном направлении пилки.
2- острым лезвием
3- проходом через нагретую нихромовую проволоку.
Первый метод провалился сразу, т.к. пилка оставляла полиэтиленовую стружку которая попадала в еду, а это неприемлемо.
Второй метод получился удачным, однако бывали случаи когда нож не прорезал пакет до конца и это приводило к печальным последствиям( заеданию пакетика в механизме и неровному выдавливанию массы) это недопустимо т.к. при длительном отсутствии такое устройство просто заедало и переставало работать.
Самым рабочим оказался 3й метод. Тут пакетик отрезался точно, а засчет давления в пакете и преднатяга от валов его края не запекались, как мы предполагали раньше.
Таким образом в наш проект мы поставили именно нихромовую проволоку которая управляется по ардуино через реле.
Сам проект был готов, но не готова его электроника. Я решил, что размещу отсек с электроникой в углу корпуса. Самый главный элемент моей прошивки - это базовый контроллер Arduino.. Я соединил все компоненты между собой и получил рабочий механизм.
Плюсы моего проекта
Самым большим плюсом моего проекта «Автоматическая кормушка для кота (для жидкого корма)» является то, что таких кормушек нет в продаже.
Еще один плюс моей автоматической кормушки для кота (для жидкого корма) – это универсальность. Она подходит под разные виды корма, так как размеры пакетиков с жидким кормом фирм Felix, Sheba, Gourmet, Perfect Fit одинаковые (проверено в магазине).
А еще есть один плюс в том, что эту автокормушку можно применить и для небольших домашних собачек.
Эта кормушка получилась по цене немного дешевле диспенсера для сухого корма, который в интернет-магазине стоит в районе 2 000 руб. Но если предположить, что я с мамой уехал бы в отпуск, а моих котов станут приезжать кормить дедушка на машине, он сэкономит немало денег на бензине.
Минусы моего проекта
К минусом можно отнести то, что этот проект довольно сложный и занимает на сборку много времени.
Еще один минус моего проекта в том, что автокормушка ещё не совсем настроена, иногда может быть нестабильна в работе.
Выводы (заключение)
Я считаю, что мой проект получился очень полезным в жизни, особенно для тех у кого есть кошки, которые едят жидкий корм, и мало времени находятся дома или же уехали в отпуск. Или, например, вы хотите в выходной день поспать подольше, а кошки хотят есть, и начинают мяукать и мешают спать. То с такой кормушкой вы можете про это забыть и спать спокойно, потому что она накормит ваших домашних питомцев.
Дальнейшее продолжение проекта
Я думаю, что мой проект можно усовершенствовать тем, что на лицевой стороне корпуса разместить дисплей, а также кнопки для регулирования:
1.Чтобы можно было задать через какой промежуток времени подавать пакетик или в какое время.
2.Также можно было бы выбрать сколько за одну порцию можно давать пакетиков коту (котам, если их несколько).
Также я думаю, что можно поставить WI-FI модуль, чтобы можно было кормить кота, когда вам захочется, поставить камеру для наблюдения за котом.
Ещё можно поставить динамик со звуком тарелки ли же корма, так как мои кошки всегда прибегают на звук тарелки.
Также я думаю, что можно было бы сделать специальные капсулы с пакетиками по 30 штук (больше или меньше в зависимости от количества котов). Это на неделю и, когда капсула закончится просто вставить другую капсулу, просто, легко и удобно.
Список литературы
1. Internet
2. ru.wikipedia.org - Википедия – свободная энциклопедия
3. http://arduino.ru
4. Arduino для изобретателей. Обучение по электронике на 10 занимательных проектах: Пер. с англ. / Б.Хуанг, Д. Ранберг. – Спб.: БХВ-Петербург, 2019. – 288с.: ил.
Приложение 1
Приложение 2


Скачано с www.znanio.ru
ЮЖНО-УРАЛЬСКАЯ ИНТЕЛЛЕКТУАЛЬНО-СОЦИАЛЬНАЯ
Содержание • Введение •
Введение У нашей современной жизни очень быстрый темп, мы все время торопимся и куда-то бежим, на учебу, работу и так далее
Основное содержание Первым делом я начал искать в интернете автоматические кормушки для животных, таких предложений оказалось довольно много, однако они все имели один критический недостаток:…
ABS может принимать много разных полимерных форм, ему можно придать множество самых разных свойств
Плюсы моего проекта Самым большим плюсом моего проекта «Автоматическая кормушка для кота (для жидкого корма)» является то, что таких кормушек нет в продаже
Дальнейшее продолжение проекта
Список литературы 1. Internet 2
Приложение 1
Автоматическя кормушка для кота
Приложение 2

Автоматическя кормушка для кота

© ООО «Знанио»
С вами с 2009 года.
![]()