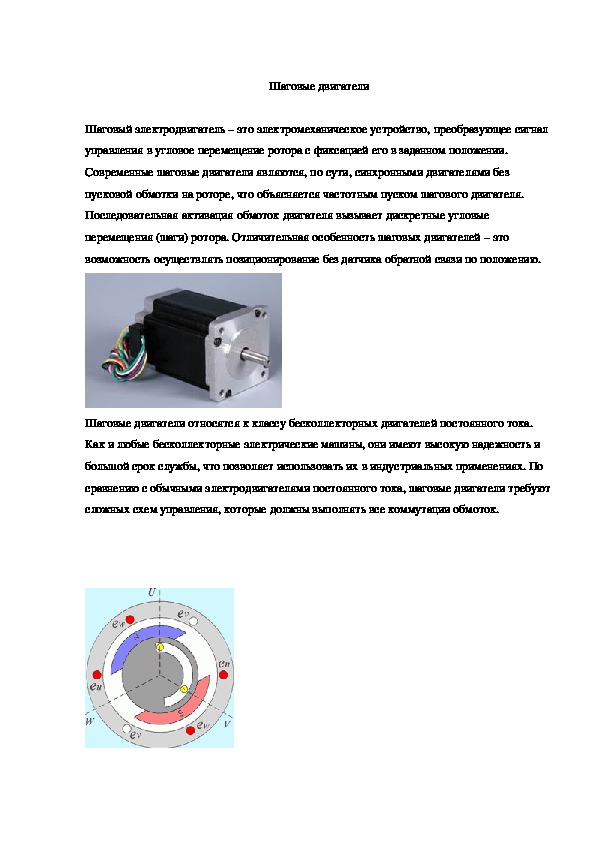
Шаговый электродвигатель – это электромеханическое устройство, преобразующее сигнал управления в угловое перемещение ротора с фиксацией его в заданном положении. Современные шаговые двигатели являются, по сути, синхронными двигателями без пусковой обмотки на роторе, что объясняется частотным пуском шагового двигателя. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора. Отличительная особенность шаговых двигателей – это возможность осуществлять позиционирование без датчика обратной связи по положению.Лекция Шаговые двигатели
Шаговые двигатели
Шаговый электродвигатель – это электромеханическое устройство, преобразующее сигнал
управления в угловое перемещение ротора с фиксацией его в заданном положении.
Современные шаговые двигатели являются, по сути, синхронными двигателями без
пусковой обмотки на роторе, что объясняется частотным пуском шагового двигателя.
Последовательная активация обмоток двигателя вызывает дискретные угловые
перемещения (шаги) ротора. Отличительная особенность шаговых двигателей – это
возможность осуществлять позиционирование без датчика обратной связи по положению.
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока.
Как и любые бесколлекторные электрические машины, они имеют высокую надежность и
большой срок службы, что позволяет использовать их в индустриальных применениях. По
сравнению с обычными электродвигателями постоянного тока, шаговые двигатели требуют
сложных схем управления, которые должны выполнять все коммутации обмоток.Существуют три основных типа шаговых двигателей:
∙ двигатели с переменным магнитным сопротивлением;
∙ двигатели с постоянными магнитами;
∙ гибридные двигатели – наиболее часто используются в фрезерных станках с
ЧПУ.
Гибридные шаговые двигатели
Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным
магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного
двигателя имеет зубцы, расположенные в осевом направлении. Гибридные шаговые
двигатели обеспечивают меньшую величину шага, больший момент и большую скорость,
чем двигатели других типов. Обычно, число шагов на оборот для гибридных двигателей
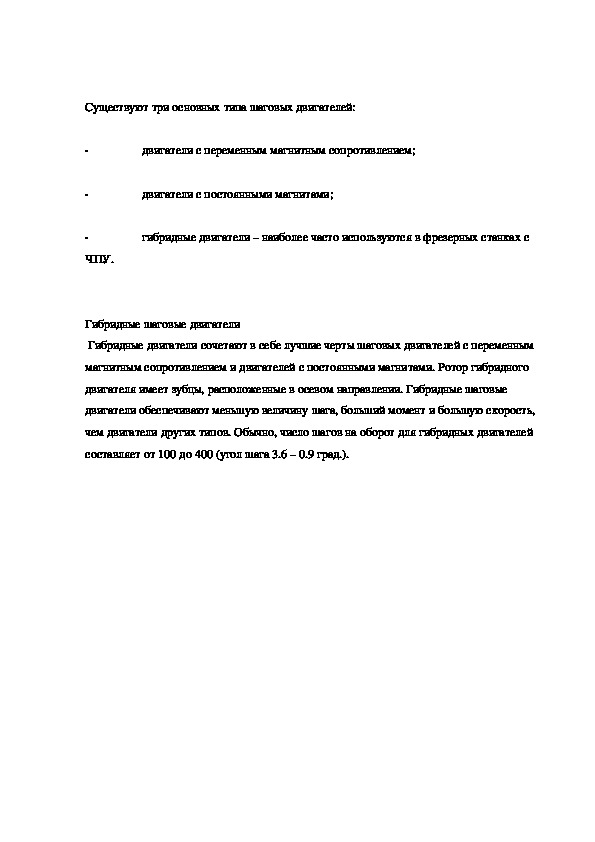
составляет от 100 до 400 (угол шага 3.6 – 0.9 град.).Строение шаговых двигателей
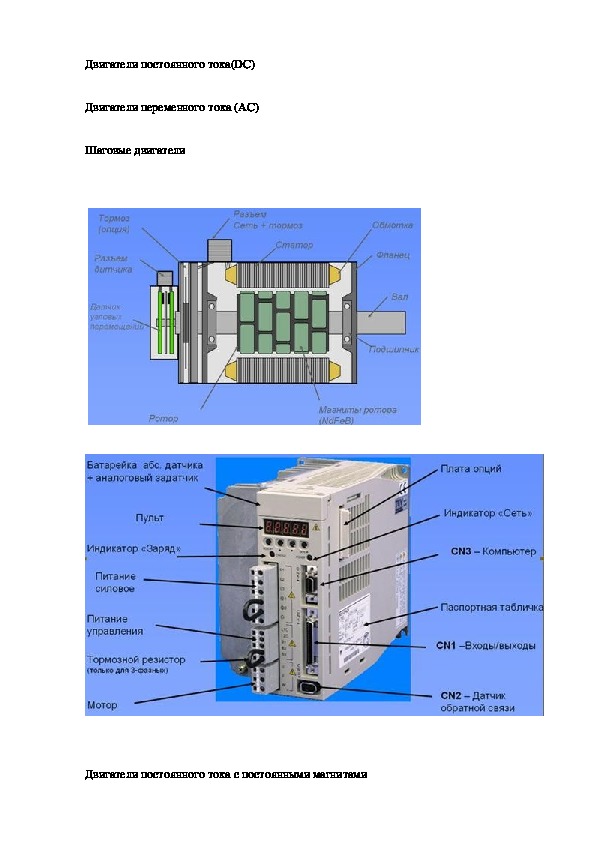
Шаговый электродвигатель состоит из статора, на котором расположены обмотки
возбуждения (катушки электромагнитов) и ротора с постоянными магнитами (реже
используются роторы с переменным магнитным сопротивлением). Шаговые двигатели с
магнитным ротором позволяют получать больший крутящий момент и обеспечивают
фиксацию ротора при обесточенных обмотках. По этой причине шаговые двигатели часто
используются в станках с ЧПУ.
Высокая температура, созданная в катушках может легко рассеяться через массу
двигателя, таким образом, шаговые двигатели менее подвержены повреждениям от нагрева.Принципы работы шагового двигателяНа рисунке видны основные стадии действия шагового двигателя.В соответствии с тем, какие катушки статора включены или выключены, ротор будет
вращаться, чтобы «подстроиться» к магнитному полю. Представим себе шаговый двигатель
с двумя катушками в его статоре и постоянном магните в качестве его ротора, как
показано на рисунке. Когда соответствующие катушки статора возбуждены, постоянно
намагниченный ротор повернётся, чтобы «выстроиться» в линию с магнитным полем
статора (a). Ротор останется в этом положении, если поле не вращается. Когда энергия к
данной катушке не будет поступать, а будет направлена к следующей катушке, ротор
повернётся снова, чтобы подстроиться к полю в новой позиции (b, с). Каждый поворот
соответствует углу шага, который может измениться от 180° до доли градуса (в данном
примере это 60°). Затем включается следующая катушка, в то время как вторая выключена.
Это заставит ротор повернуться на следующий шаг в том же самом направлении. Процесс
продолжается, пока одна катушка выключается, а другая включается.
Последовательность шести шагов вернет ротор в то же самое состояние, какое было в
начале последовательности. Теперь представьте, что при окончании первого шага, вместо
выключения одной катушки и включения второй катушки, что обе были бы включены. В
этом случае, ротор повернется только на 30° (половина от 60°), чтобы выровнять себя в
направлении наименьшего сопротивления. Позже, если первая катушка выключена, в то
время как вторая включена, ротор повернётся еще на 30°. Это называется действием
полушага и включает последовательность восьми движений.
При противоположной последовательности включений/выключений, ротор будет вращаться
в противоположном направлении. Наиболее применим в промышленности шаговый мотор,
продвигающийся на угол от 1.8° до 7.5° при полном шаге. Очевидно, чтобы уменьшить
размер шагов, число полюсов нужно увеличить. Однако есть физический предел тому,
сколько полюсов могут использоваться.
Для того чтобы уменьшить дискретность перемещения ротора шагового двигателя
применяется микрошаговый режим. Микрошаг реализуется при независимом управлении
током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках
можно зафиксировать ротор в промежуточном положении между шагами. Таким образом
можно повысить плавность вращения ротора и добиться высокой точности
позиционирования. В микрошаговом режиме можно получить разрешающую способность в
51200 шаг/об.
СерводвигателиСерводвигатель – это двигатель с обратной связью, которой можно управлять, чтобы либо
достичь требуемой скорости (и, следовательно, крутящего момента) либо получить
нужный угол поворота. С этой целью устройство обратной связи посылает сигналы в цепь
контроллера сервомотора, сообщая об угловом положении и скорости. Если в результате
более высоких нагрузок скорость окажется ниже требуемой величины, ток будет
увеличиваться до тех пор, пока скорость не достигнет нужной величины. Если сигнал
скорости показывает, что скорость больше, чем нужно, ток, соответственно, уменьшается.
Если применена обратная связь по положению, то сигнал о положении используется, чтобы
остановить двигатель, как только ротор приблизится к нужному угловому положению.
Для этой цели могут использоваться различные типы датчиков, включая кодирующие
устройства, резольверы, потенциометры и тахометры. Если используется датчик
положения типа потенциометра или кодирующего устройства, его сигнал может быть
дифференцирован, чтобы выработать сигнал о скорости.
Некоторые шаговые движки (видео):
http://www.youtube.com/watch?v=dY71z739jbQ
http://www.youtube.com/watch?v=mnImyMhmUU0
http://www.youtube.com/watch?v=c2vEijMAMA
http://www.youtube.com/watch?v=bAgV2vtI468
СЕРВОДВИГАТЕЛИ
Двигатели постоянного токаДвигатели постоянного тока(DC)
Двигатели переменного тока (AC)
Шаговые двигатели
Двигатели постоянного тока с постоянными магнитамиСинхронные двигатели с постоянными магнитами
Асинхронные двигатели с управлением ориентированным полем
АС двигатель это двигатель переменного тока. Он значительно дешевле в производстве,
чем двигатель постоянного тока, поэтому цена их дешевле DC двигателей. В асинхронном
моторе нет коллектора, щёточного узла, его легче мотать и т.п., но управлять двигателем
переменного тока сложнее. Чтобы регулировать обороты необходимо менять частоту
(желательно одновременно с напряжением) на двигателе.
Основные виды AC двигателей, рассчитанных в основном на работу с синусоидальным
током, бывают следующие: синхронные, асинхронные и коллекторные.
В синхронных двигателях ротор (постоянный магнит) вращается относительно статора с
той же скоростью и в том же направлении (синхронно), как и вращающееся магнитное поле,
а в асинхронных двигателях ротор вращается несинхронно с вращающимся магнитным
полем.
Подробнее по принцыпам работы двигателей смотрите здесь:
http://leg.co.ua/info/elektricheskiemashiny/principyrabotyelektrodvigateley.html
DС двигатель это тот же двигатель постоянного тока. Обычно с постоянным магнитом.
Основное отличие в наличии энкодера.
Драйвера для двигателей АС и DC совершенно разные. Драйвер для АС вырабатывает
трёхфазное напряжение переменной частоты и амплитуды, в зависимости от напряжения
задания, а драйвер для DC просто меняет величину постоянного напряжения на якоре
двигателя постоянного тока (ДПТ), тоже в зависимости от задания.С точки зрения разработчика , привода для AC и DC двигателей очень похожи. Ядро
программы стандартные функции контроля положения, скорости, ускорения и тока. В АС
добавляется независимый контроль фаз положение в фазе, ток в фазе.
В настоящее время сервоприводы применяются в высокопроизводительном оборудовании в
таких отраслях как производство напитков, упаковки, стройматериалов; в подъемно
транспортной технике; полиграфии. Наблюдается тенденция к увеличению доли
сервоприводов в деревообработке и пищевой промышленности.
Решающим фактором применения сервоприводов является не только их высокая динамика,
но и возможность получения высокостабильного или точного управления, широкий
диапазон регулирования скорости, помехоустойчивость, малые габариты и вес.
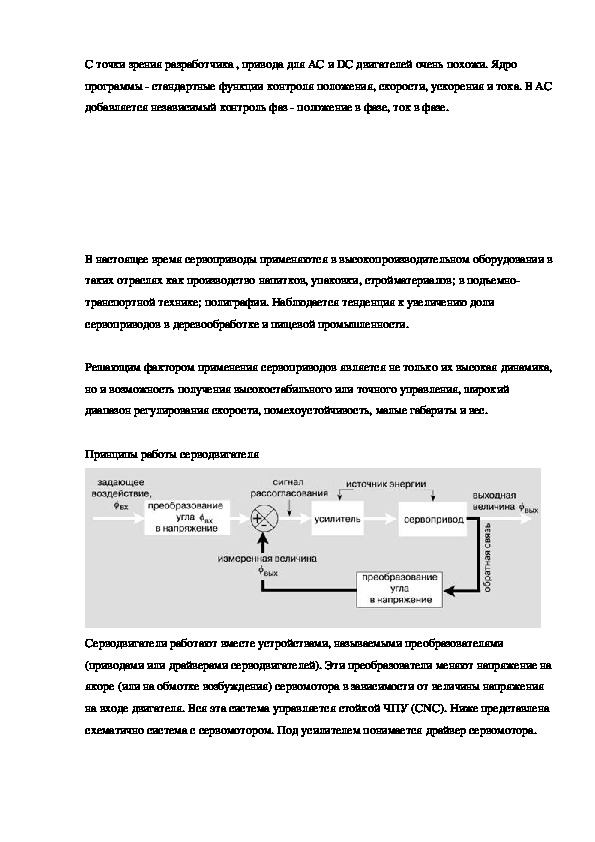
Принципы работы серводвигателя
Серводвигатели работают вместе устройствами, называемыми преобразователями
(приводами или драйверами серводвигателей). Эти преобразователи меняют напряжение на
якоре (или на обмотке возбуждения) сервомотора в зависимости от величины напряжения
на входе двигателя. Вся эта система управляется стойкой ЧПУ (СNC). Ниже представлена
схематично система с сервомотором. Под усилителем понимается драйвер сервомотора.Например, в программе, заложенной в стойке ЧПУ, присутствует команда переместиться
по осиY на расстояние 10 мм. Со стойки ЧПУ на вход драйвера сервомотора подается
определенное напряжение. Сервомотор начинает вращать ходовой винт, с которым
соединён энкодер и портал станка (перемещаемая часть со шпинделем). Во время вращения
ходового винта энкодер вырабатывает импульсы, а стойка их подсчитывает.
Математическое обеспечение стойки ЧПУ устроено так, что стойка «знает», что
расстоянию 10мм соответствует, например, 10000 импульсов от энкодера. Пока стойка
станка не получит эти 10000 импульсов, на вход драйвера будет подаваться напряжение
задания, т. е. будет вырабатываться так называемое рассогласование. Когда портал станка
проедет заданные 10 мм, тогда стойка получит свои 10000 импульсов, и напряжение на
входе драйвера сервомотора станет равным 0, двигатель остановится, станок отработает
строго 10 мм (при отсутствии люфтов).
Если под действием какихлибо внешних сил произойдёт смещение портала станка, то
энкодер сразу выдаст импульсы. Эти импульсы будут сосчитаны стойкой, которая, в свою
очередь, выдаст напряжение рассогласования на драйвер. Драйвер повернёт якорь
двигателя на весьма малый угол, чтобы рассогласование было равно 0. Таким образом,
портал станка удерживается возле заданной точки с весьма высокой точностью.
Хочу также заметить, что далеко не всякий двигатель может поворачиваться на весьма
малые углы, обеспечивать динамику разгона, нужный крутящий момент и т. п. Это
основная причина, по которой сервопривода являются достаточно дорогими устройствами.
Синхронные серводвигатели1 статор с обмоткой
2 разъем для подключений
3 датчик скорости и положения
4 электромагнитный тормоз
5 ротор с магнитами
Синхронные серводвигатели это трехфазные синхронные электродвигатели с
возбуждением от постоянных магнитов и датчиком положения ротора (ACдвигатели). Их
основным достоинством является очень низкий момент инерции ротора относительно
крутящего момента. Это позволяет реализовать очень высокое быстродействие.
Достижимо время разгона на номинальную частоту вращения за десятки миллисекунд и
реверс с полной скорости в пределах одного оборота вала двигателя.
Основной областью применения этих двигателей являются приводы подач станков и
технологические установки со временем цикла менее 1 секунды (например, производство
упаковки, быстродействующие позиционные системы автоматических складов).
Для сервоприводов характерны следующие показатели:
• управление по скорости, по моменту или по позиции;• диапазон регулирования скорости более 1:1000;
• статическая точность поддержания скорости по валу двигателя до 0,01%;
• точность поддержания позиции по валу двигателя менее ± 10;
• низкий вес и компактные размеры
1 статор с обмоткой
2 разъем для подключений
3 датчик скорости и положения
4 электромагнитный тормоз
5 ротор с магнитами
1. бесконтактность и отсутствие узлов, требующих обслуживания;
2. высокое быстродействие;
3. большая перегрузочная способность по моменту (кратность максимального момента
кратковременно может превышать 3);
4. имеют практически неограниченный диапазон регулирования частоты вращения (1:10
000 и более); показатели кпд вентильных двигателей превышают 90% и при изменении
нагрузки двигателя по мощности и при колебаниях напряжения питающей сети меняются
очень несущественно, тогда как у асинхронных электродвигателей максимальный кпд не
превышает 86% и зависит от изменений нагрузки;5. низкий перегрев вентильного электродвигателя благодаря отсутствию обмоток на
роторе двигателя, что существенно увеличивает срок службы двигателя, работающего в
режиме частых перегрузок;
6. большая плотность момента на единицу массы электродвигателя.