Тактильные (осязательные) датчики являются самыми «молодыми». Их появление обусловлено развитием робототехники и автоматических поточных линий.
Существующая классификация рассматривает три типа тактильных датчиков: касания, усилия и проскальзывания. Первые два типа тактильных датчиков измеряют один и тот же параметр – действующую силу. Отличаются они только видом выходного сигнала. Датчики усилия имеют аналоговый выходной сигнал, а датчики касания – выход релейного типа с регулируемыми уставками.Лекция Тактильные (осязательные) датчики
Тактильные датчики очувствления
Тактильные (осязательные) датчики являются самыми «молодыми». Их
появление обусловлено развитием робототехники и автоматических поточных
линий.
Существующая классификация рассматривает три типа тактильных датчиков:
касания, усилия и проскальзывания. Первые два типа тактильных датчиков
измеряют один и тот же параметр – действующую силу. Отличаются они
только видом выходного сигнала. Датчики усилия имеют аналоговый
выходной сигнал, а датчики касания – выход релейного типа с регулируемыми
уставками.
Реализуются тактильные датчики с использованием различных физических
явлений, но принципиальным отличием от других датчиков является их
небольшая толщина. Это достигается за счет использования специальных
материалов. Они, как правило, обладают гибкостью, эластичностью и
прочностью при хорошей электропроводности.
На рис. приведен пример реализации тактильного датчика, реагирующего на
силовое воздействие.
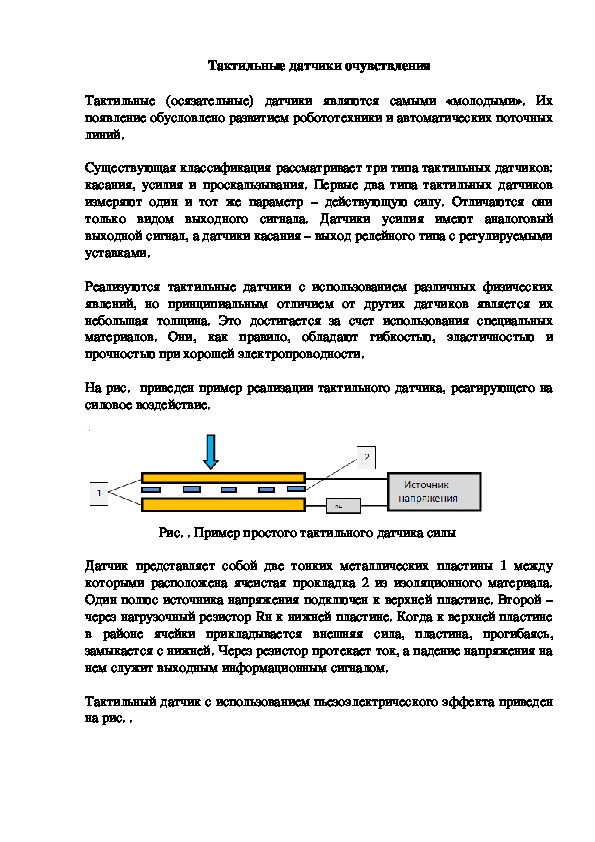
Рис. . Пример простого тактильного датчика силы
Датчик представляет собой две тонких металлических пластины 1 между
которыми расположена ячеистая прокладка 2 из изоляционного материала.
Один полюс источника напряжения подключен к верхней пластине. Второй –
через нагрузочный резистор Rн к нижней пластине. Когда к верхней пластине
в районе ячейки прикладывается внешняя сила, пластина, прогибаясь,
замыкается с нижней. Через резистор протекает ток, а падение напряжения на
нем служит выходным информационным сигналом.
Тактильный датчик с использованием пьезоэлектрического эффекта приведен
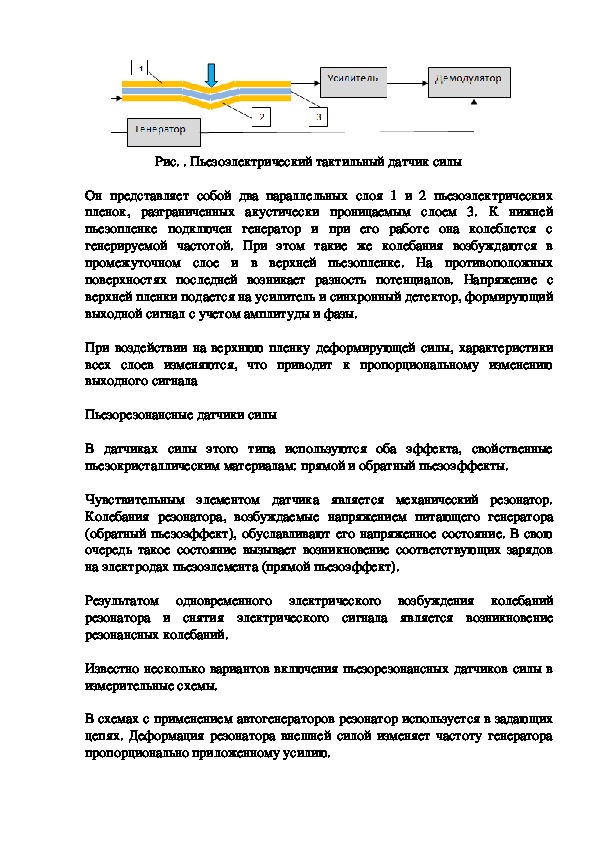
на рис. .Рис. . Пьезоэлектрический тактильный датчик силы
Он представляет собой два параллельных слоя 1 и 2 пьезоэлектрических
пленок, разграниченных акустически проницаемым слоем 3. К нижней
пьезопленке подключен генератор и при его работе она колеблется с
генерируемой частотой. При этом такие же колебания возбуждаются в
промежуточном слое и в верхней пьезопленке. На противоположных
поверхностях последней возникает разность потенциалов. Напряжение с
верхней пленки подается на усилитель и синхронный детектор, формирующий
выходной сигнал с учетом амплитуды и фазы.
При воздействии на верхнюю пленку деформирующей силы, характеристики
всех слоев изменяются, что приводит к пропорциональному изменению
выходного сигнала
Пьезорезонансные датчики силы
В датчиках силы этого типа используются оба эффекта, свойственные
пьезокристаллическим материалам: прямой и обратный пьезоэффекты.
Чувствительным элементом датчика является механический резонатор.
Колебания резонатора, возбуждаемые напряжением питающего генератора
(обратный пьезоэффект), обуславливают его напряженное состояние. В свою
очередь такое состояние вызывает возникновение соответствующих зарядов
на электродах пьезоэлемента (прямой пьезоэффект).
Результатом одновременного электрического возбуждения колебаний
резонатора и снятия электрического сигнала является возникновение
резонансных колебаний.
Известно несколько вариантов включения пьезорезонансных датчиков силы в
измерительные схемы.
В схемах с применением автогенераторов резонатор используется в задающих
цепях. Деформация резонатора внешней силой изменяет частоту генератора
пропорционально приложенному усилию.В другом варианте такой же схемы внешнее воздействие вызывает изменение
положения электродов относительно резонатора, что также приводит к
изменению частоты.
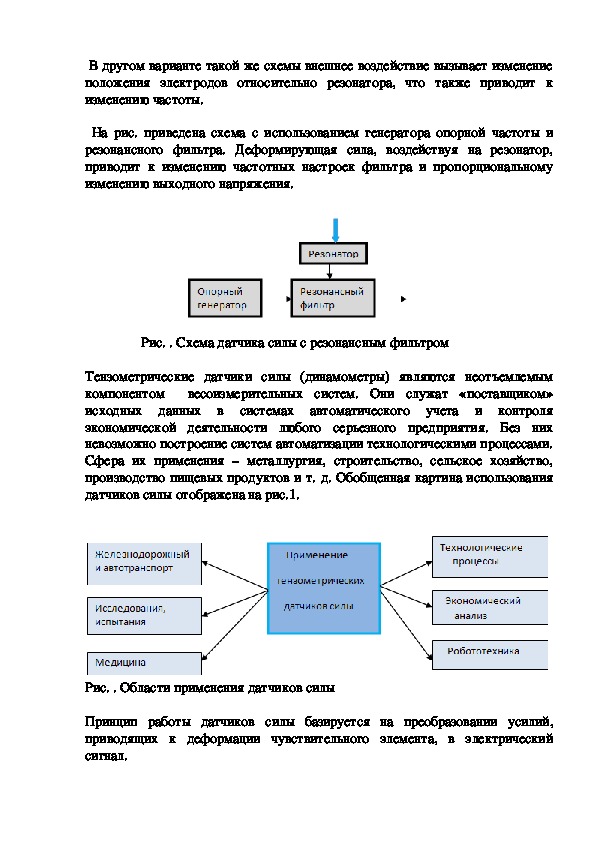
На рис. приведена схема с использованием генератора опорной частоты и
резонансного фильтра. Деформирующая сила, воздействуя на резонатор,
приводит к изменению частотных настроек фильтра и пропорциональному
изменению выходного напряжения.
Рис. . Схема датчика силы с резонансным фильтром
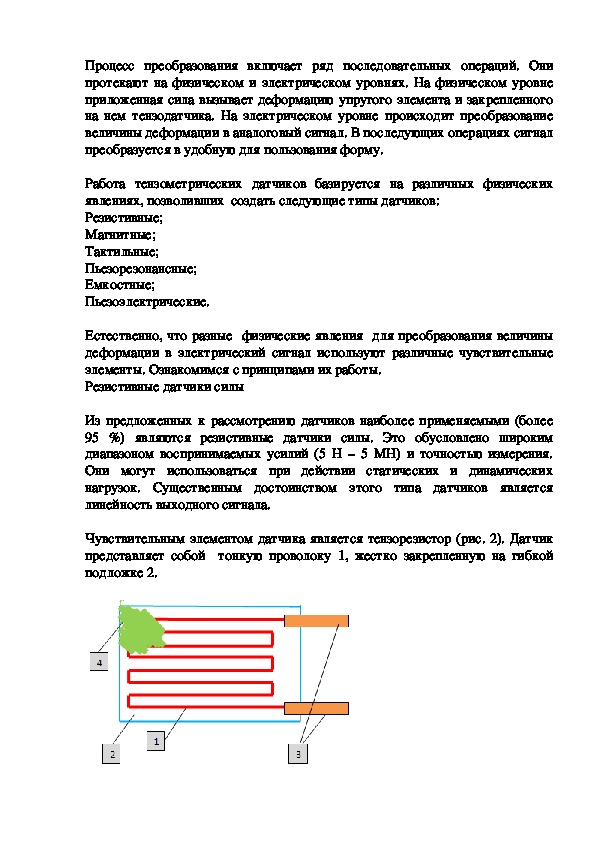
Тензометрические датчики силы (динамометры) являются неотъемлемым
компонентом
весоизмерительных систем. Они служат «поставщиком»
исходных данных в системах автоматического учета и контроля
экономической деятельности любого серьезного предприятия. Без них
невозможно построение систем автоматизации технологическими процессами.
Сфера их применения – металлургия, строительство, сельское хозяйство,
производство пищевых продуктов и т. д. Обобщенная картина использования
датчиков силы отображена на рис.1.
Рис. . Области применения датчиков силы
Принцип работы датчиков силы базируется на преобразовании усилий,
приводящих к деформации чувствительного элемента, в электрический
сигнал.Процесс преобразования включает ряд последовательных операций. Они
протекают на физическом и электрическом уровнях. На физическом уровне
приложенная сила вызывает деформацию упругого элемента и закрепленного
на нем тензодатчика. На электрическом уровне происходит преобразование
величины деформации в аналоговый сигнал. В последующих операциях сигнал
преобразуется в удобную для пользования форму.
Работа тензометрических датчиков базируется на различных физических
явлениях, позволивших создать следующие типы датчиков:
Резистивные;
Магнитные;
Тактильные;
Пьезорезонансные;
Емкостные;
Пьезоэлектрические.
Естественно, что разные физические явления для преобразования величины
деформации в электрический сигнал используют различные чувствительные
элементы. Ознакомимся с принципами их работы.
Резистивные датчики силы
Из предложенных к рассмотрению датчиков наиболее применяемыми (более
95 %) являются резистивные датчики силы. Это обусловлено широким
диапазоном воспринимаемых усилий (5 Н – 5 МН) и точностью измерения.
Они могут использоваться при действии статических и динамических
нагрузок. Существенным достоинством этого типа датчиков является
линейность выходного сигнала.
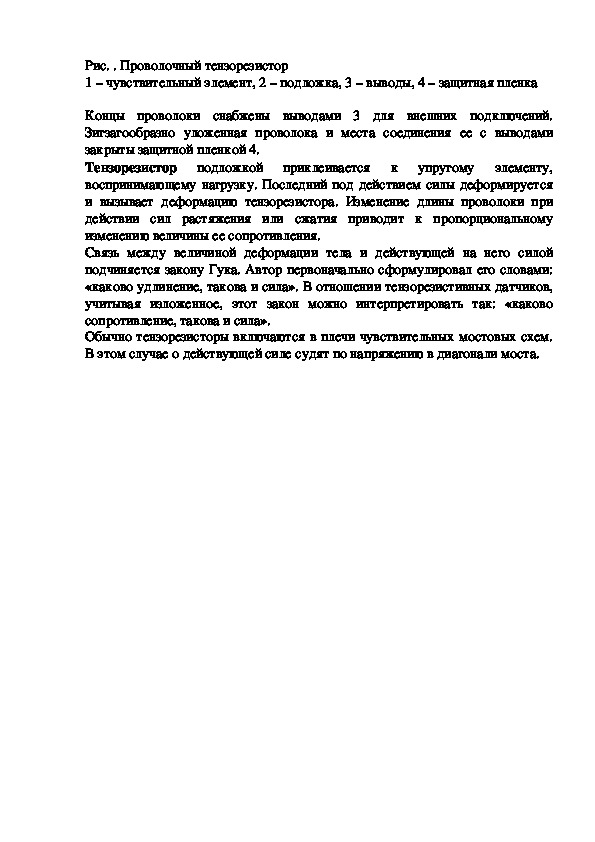
Чувствительным элементом датчика является тензорезистор (рис. 2). Датчик
представляет собой тонкую проволоку 1, жестко закрепленную на гибкой
подложке 2.Рис. . Проволочный тензорезистор
1 – чувствительный элемент, 2 – подложка, 3 – выводы, 4 – защитная пленка
Концы проволоки снабжены выводами 3 для внешних подключений.
Зигзагообразно уложенная проволока и места соединения ее с выводами
закрыты защитной пленкой 4.
подложкой приклеивается к упругому элементу,
Тензорезистор
воспринимающему нагрузку. Последний под действием силы деформируется
и вызывает деформацию тензорезистора. Изменение длины проволоки при
действии сил растяжения или сжатия приводит к пропорциональному
изменению величины ее сопротивления.
Связь между величиной деформации тела и действующей на него силой
подчиняется закону Гука. Автор первоначально сформулировал его словами:
«каково удлинение, такова и сила». В отношении тензорезистивных датчиков,
учитывая изложенное, этот закон можно интерпретировать так: «каково
сопротивление, такова и сила».
Обычно тензорезисторы включаются в плечи чувствительных мостовых схем.
В этом случае о действующей силе судят по напряжению в диагонали моста.