Поделиться

8. Исполнительные устройства автоматических регуляторов ОАП
Устройство, преобразующее управляющий сигнал регулятора в перемещение РО, называют исполнительным механизмом. Такое устройство обычно состоит из исполнительного двигателя, передаточного или преобразующего узла (например, редуктора), а также систем защиты, контроля и сигнализации положения выходного элемента, блокировки и отключения. Передаточная функция ИМ входит в ПФ регулятора, и потому ИМ должен обладать достаточным быстродействием и точностью, с тем чтобы осуществлять перемещение РО с возможно меньшим искажением закона регулирования.
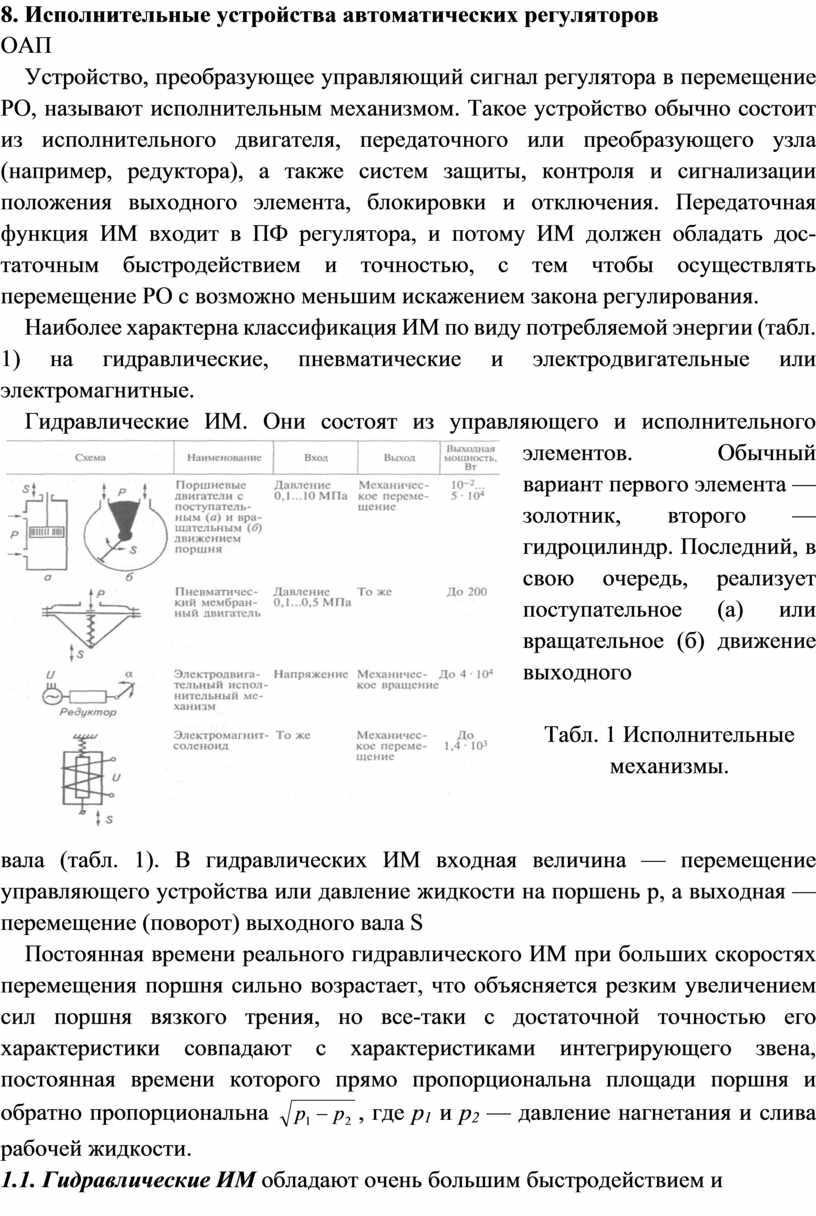
Наиболее характерна классификация ИМ по виду потребляемой энергии (табл. 1) на гидравлические, пневматические и электродвигательные или электромагнитные.
 Гидравлические
ИМ. Они состоят из управляющего и исполнительного элементов. Обычный вариант
первого элемента — золотник, второго — гидроцилиндр. Последний, в свою
очередь, реализует поступательное (а) или вращательное (б) движение выходного
Гидравлические
ИМ. Они состоят из управляющего и исполнительного элементов. Обычный вариант
первого элемента — золотник, второго — гидроцилиндр. Последний, в свою
очередь, реализует поступательное (а) или вращательное (б) движение выходного
Табл. 1 Исполнительные механизмы.
вала (табл. 1). В гидравлических ИМ входная величина — перемещение управляющего устройства или давление жидкости на поршень р, а выходная — перемещение (поворот) выходного вала S
Постоянная времени
реального гидравлического ИМ при больших скоростях перемещения поршня сильно
возрастает, что объясняется резким увеличением сил поршня вязкого трения, но
все-таки с достаточной точностью его характеристики совпадают с
характеристиками интегрирующего звена, постоянная времени которого прямо
пропорциональна площади поршня и обратно пропорциональна ![]() , где p1
и p2
— давление нагнетания и слива рабочей жидкости.
, где p1
и p2
— давление нагнетания и слива рабочей жидкости.
1.1. Гидравлические ИМ обладают очень большим быстродействием и выходной мощностью, и потому их применяют в системах автоматизации мобильных сельскохозяйственных машин и агрегатов.
1.2. Пневматические ИМ. По устройству аналогичны гидравлическим. Они получили широкое распространение благодаря высокой надежности, простоте конструкции и возможности получения достаточно больших усилий.
Крутизна статической характеристики пневматического ИМ находится в прямой зависимости от площади мембраны и в обратной — от коэффициента жесткости пружины (несколько возрастает по мере ее сжатия). Соответственно, при малых изменениях выходного параметра S динамику механизма можно представить характеристиками безынерционного звена, причем коэффициент передачи которого несколько убывает с увеличением S.
Общие недостатки пневматических и гидравлических ИМ — сложность операций по их наладке и, главное, необходимость специальных компрессорных (насосных) установок для их питания.
1.3. Электродвигательные ИМ. В них используют электродвигатели постоянного и переменного тока, в том числе асинхронные двухфазные с полым ротором, с конденсаторами в цепи обмотки управления, а также асинхронные трехфазные двигатели. Исполнительные двигатели постоянного тока имеют независимое возбуждение или возбуждение от постоянных магнитов. Управляют этими двигателями, изменяя напряжение на якоре или на обмотке возбуждения (якорное или полюсное управление).
В большинстве конструкций электрических ИМ применяют двухфазные и трехфазные асинхронные двигатели.
Асинхронный двухфазный двигатель приближенно можно рассматривать как инерционное звено, если выходная величина — угловая скорость ротора, или как два последовательно соединенных звена — интегрирующее и инерционное, если выходная величина — угол а поворота ротора
РЕГУЛИРУЮЩИЕ ОРГАНЫ
Устройство, позволяющее изменять направление или расход потока вещества или энергии в соответствии с требованиями ТП, называют регулирующим органом (РО).
Работоспособность РО определяется его характеристиками: диапазоном регулирования и рабочей расходной характеристикой.
Отношение максимального расхода среды Gmax к минимальному Gmin, соответствующему перемещению РО из одного крайнего положения hmin в другое hmax, называют диапазоном регулирования
R = Gmax /Gmin
Зависимость расхода среды от положения РО h называют рабочей расходной характеристикой
G = f (h).
При разработке, выборе и наладке РО для обеспечения возможности эффективного управления ТП в широком диапазоне нагрузок и при разных режимах следует обеспечить достаточный диапазон регулирования и линейную рабочую характеристику в пределах этого диапазона. Используемые в сельскохозяйственном производстве РО можно разделить на три группы.
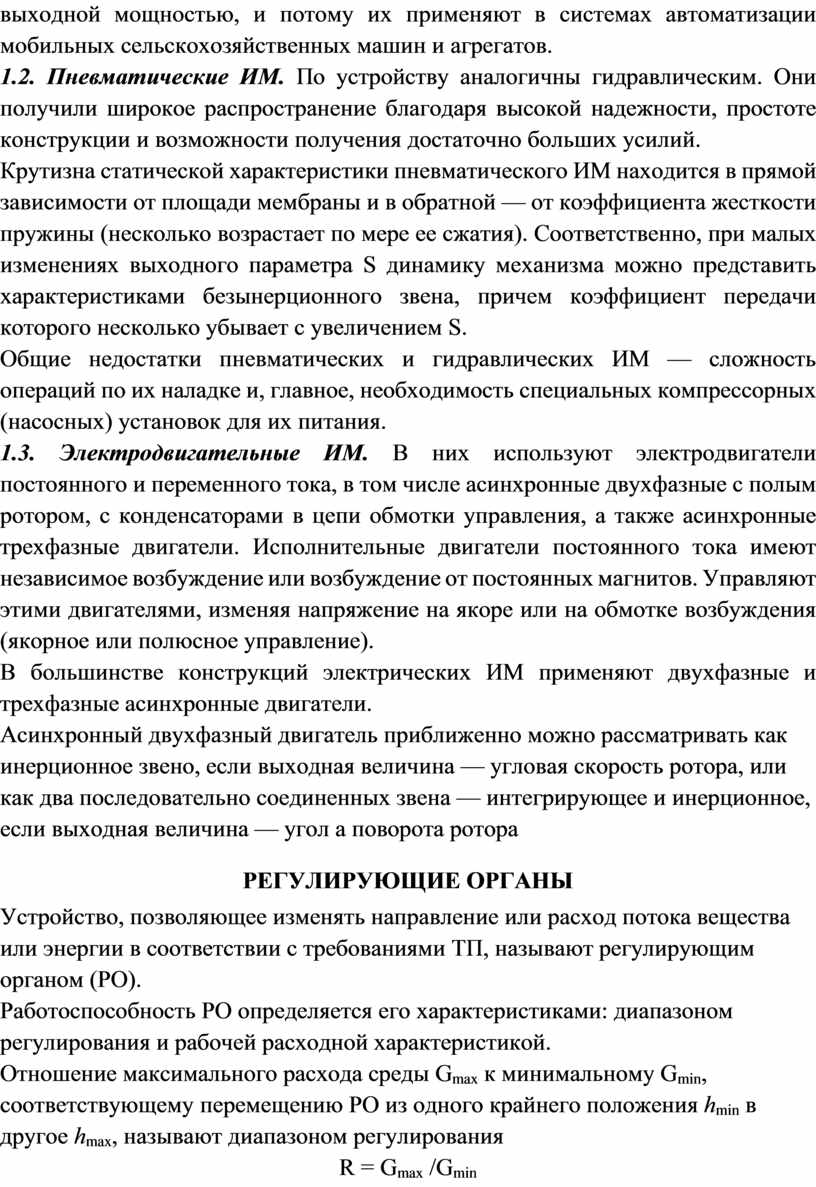
Регулирующие органы объемного типа (рис.
4.6, а). Они изменяют расход среды за счет изменения ее объема (например,
ленточные питатели-дозаторы компонентов кормовых
смесей). Материал на ленту поступает непосредственно из бункера через воронку в
его нижней части. На фронтальной грани воронки в вертикальных направляющих
перемещается заслонка, посредством которой осуществляется регулирование
производительности питателя.
кормовых
смесей). Материал на ленту поступает непосредственно из бункера через воронку в
его нижней части. На фронтальной грани воронки в вертикальных направляющих
перемещается заслонка, посредством которой осуществляется регулирование
производительности питателя.
Рис. 2. Регулирующие органы:
а — ленточный питатель (объемный); б — вибрационный питатель; в — ленточный питатель
(скоростной); г — тарельчатый питатель; д — шнековый питатель; е — секторный питатель-
ж — тарельчатый клапан; з — золотниковый клапан; и — поворотная заслонка
Скачано с www.znanio.ru
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
