Поделиться

Декартовая система координат. Формула расстояния между двумя точками.
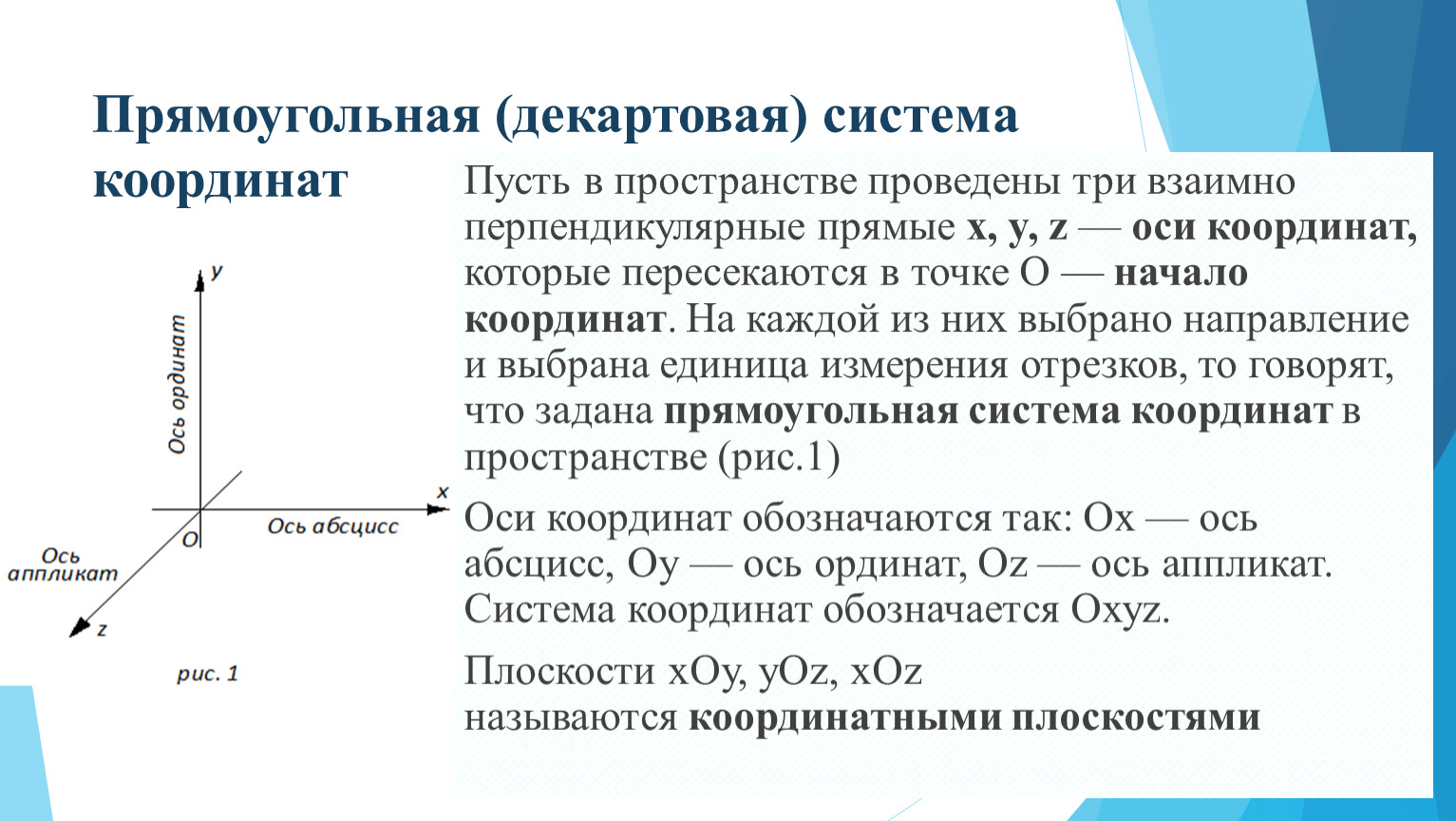
Прямоугольная (декартовая) система координат
Пусть в пространстве проведены три взаимно перпендикулярные прямые x, y, z — оси координат, которые пересекаются в точке О — начало координат. На каждой из них выбрано направление и выбрана единица измерения отрезков, то говорят, что задана прямоугольная система координат в пространстве (рис.1)
Оси координат обозначаются так: Ох — ось абсцисс, Оу — ось ординат, Оz — ось аппликат. Система координат обозначается Охуz.
Плоскости хОу, уОz, хОz называются координатными плоскостями
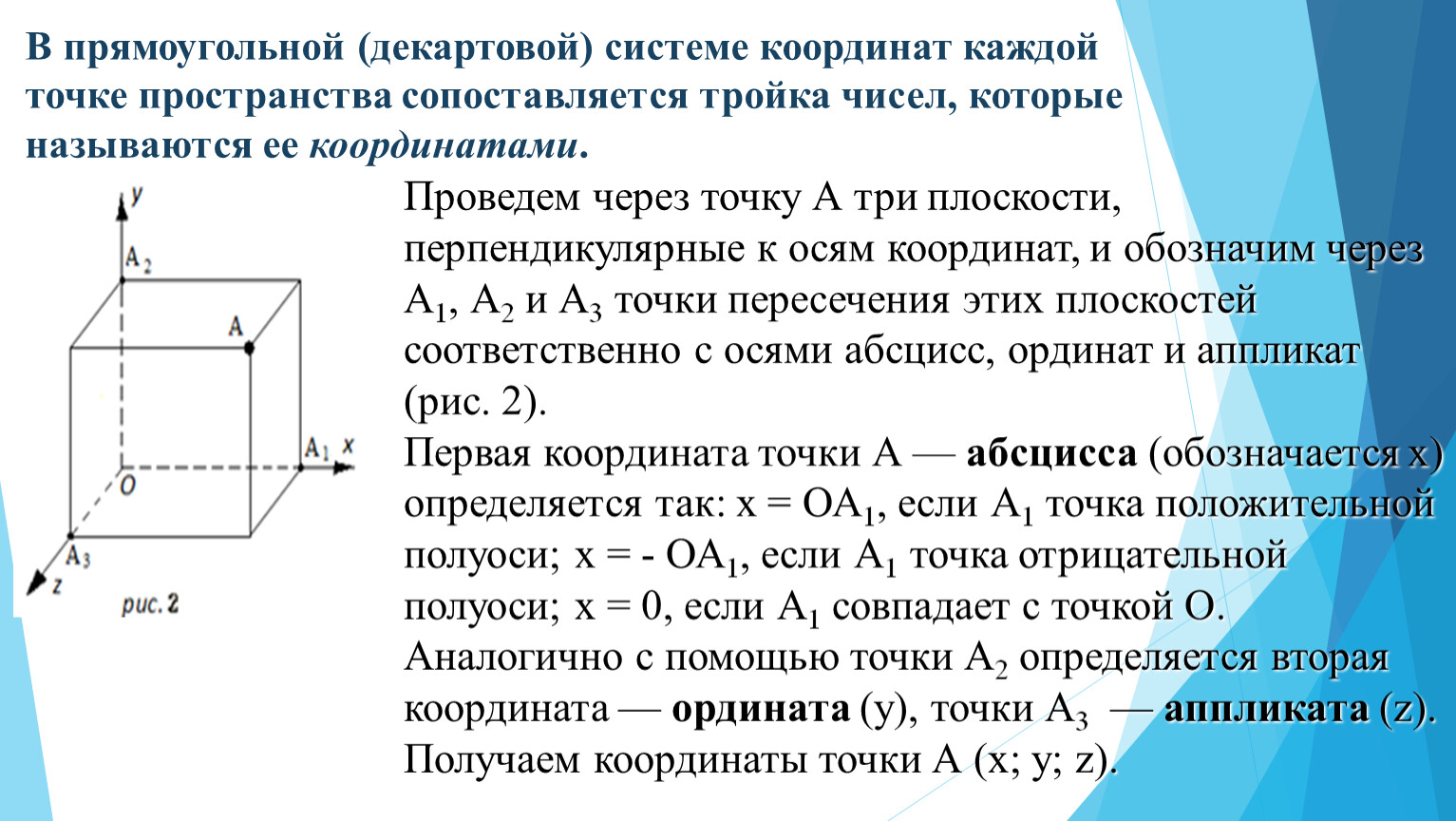
В прямоугольной (декартовой) системе координат каждой точке пространства сопоставляется тройка чисел, которые называются ее координатами.
Проведем через точку А три плоскости, перпендикулярные к осям координат, и обозначим через А1, А2 и А3 точки пересечения этих плоскостей соответственно с осями абсцисс, ординат и аппликат (рис. 2).
Первая координата точки А — абсцисса (обозначается х) определяется так: х = ОА1, если А1 точка положительной полуоси; х = - ОА1, если А1 точка отрицательной полуоси; х = 0, если А1 совпадает с точкой О.
Аналогично с помощью точки А2 определяется вторая координата — ордината (y), точки А3 — аппликата (z).
Получаем координаты точки А (х; у; z).
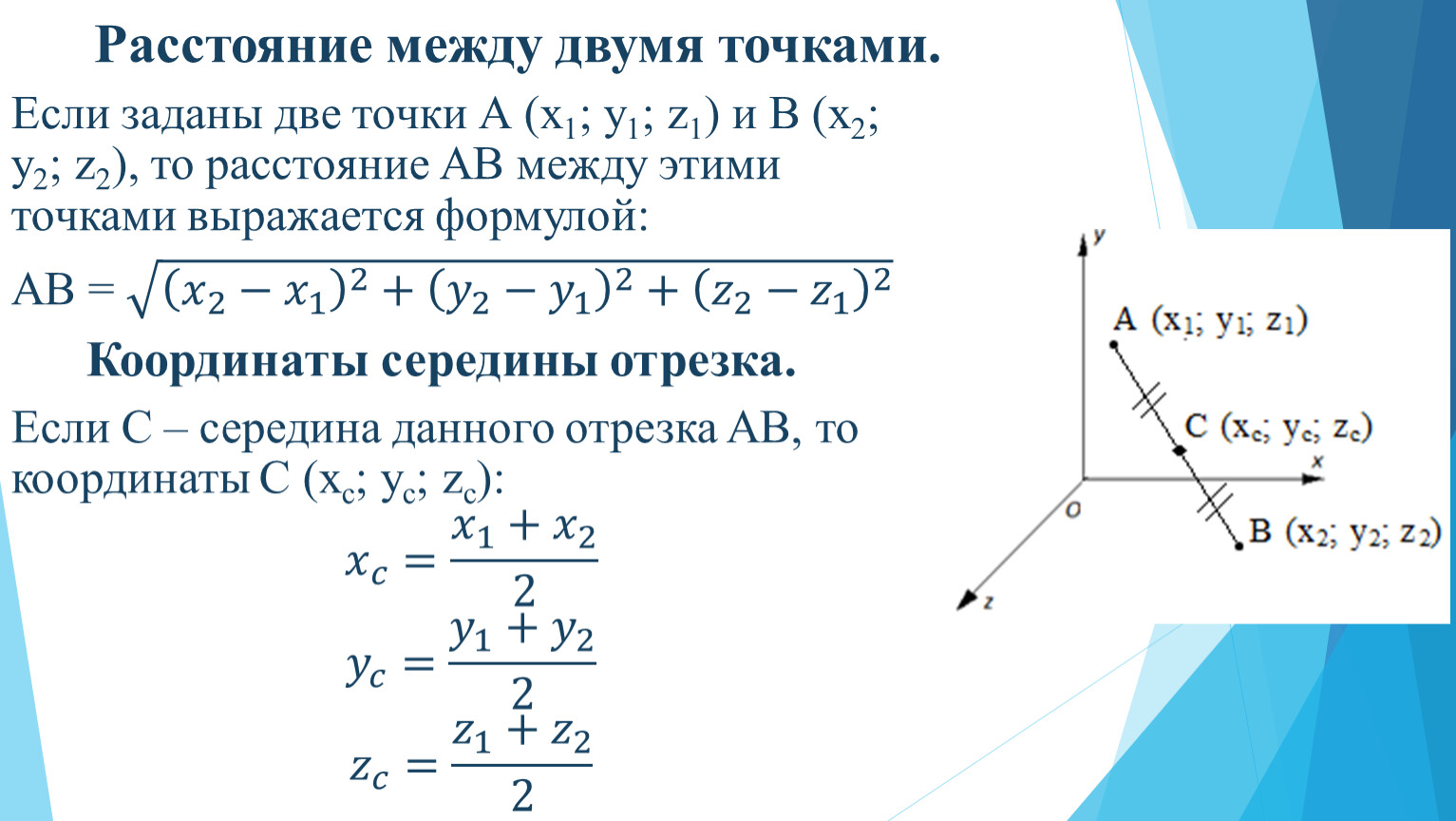
Расстояние между двумя точками.
Если заданы две точки А (x1; y1; z1) и В (x2; y2; z2), то расстояние АВ между этими точками выражается формулой:
АВ = 𝑥 2 − 𝑥 1 2 + 𝑦 2 − 𝑦 1 2 + 𝑧 2 − 𝑧 1 2 𝑥 2 − 𝑥 1 2 + 𝑦 2 − 𝑦 1 2 + 𝑧 2 − 𝑧 1 2 𝑥 2 − 𝑥 1 2 𝑥 2 − 𝑥 1 𝑥 2 𝑥𝑥 𝑥 2 2 𝑥 2 − 𝑥 1 𝑥𝑥 𝑥 1 1 𝑥 1 𝑥 2 − 𝑥 1 𝑥 2 − 𝑥 1 2 2 𝑥 2 − 𝑥 1 2 + 𝑦 2 − 𝑦 1 2 𝑦 2 − 𝑦 1 𝑦 2 𝑦𝑦 𝑦 2 2 𝑦 2 − 𝑦 1 𝑦𝑦 𝑦 1 1 𝑦 1 𝑦 2 − 𝑦 1 𝑦 2 − 𝑦 1 2 2 𝑦 2 − 𝑦 1 2 + 𝑧 2 − 𝑧 1 2 𝑧 2 − 𝑧 1 𝑧 2 𝑧𝑧 𝑧 2 2 𝑧 2 − 𝑧 1 𝑧𝑧 𝑧 1 1 𝑧 1 𝑧 2 − 𝑧 1 𝑧 2 − 𝑧 1 2 2 𝑧 2 − 𝑧 1 2 𝑥 2 − 𝑥 1 2 + 𝑦 2 − 𝑦 1 2 + 𝑧 2 − 𝑧 1 2
Координаты середины отрезка.
Если С – середина данного отрезка АВ, то координаты С (xс; yс; zс):
𝑥 𝑐 𝑥𝑥 𝑥 𝑐 𝑐𝑐 𝑥 𝑐 = 𝑥 1 + 𝑥 2 2 𝑥 1 𝑥𝑥 𝑥 1 1 𝑥 1 + 𝑥 2 𝑥𝑥 𝑥 2 2 𝑥 2 𝑥 1 + 𝑥 2 2 2 𝑥 1 + 𝑥 2 2
𝑦 𝑐 𝑦𝑦 𝑦 𝑐 𝑐𝑐 𝑦 𝑐 = 𝑦 1 + 𝑦 2 2 𝑦 1 𝑦𝑦 𝑦 1 1 𝑦 1 + 𝑦 2 𝑦𝑦 𝑦 2 2 𝑦 2 𝑦 1 + 𝑦 2 2 2 𝑦 1 + 𝑦 2 2
𝑧 𝑐 𝑧𝑧 𝑧 𝑐 𝑐𝑐 𝑧 𝑐 = 𝑧 1 + 𝑧 2 2 𝑧 1 𝑧𝑧 𝑧 1 1 𝑧 1 + 𝑧 2 𝑧𝑧 𝑧 2 2 𝑧 2 𝑧 1 + 𝑧 2 2 2 𝑧 1 + 𝑧 2 2
Определения. Модуль вектора. Равенство векторов. Действия над векторами.
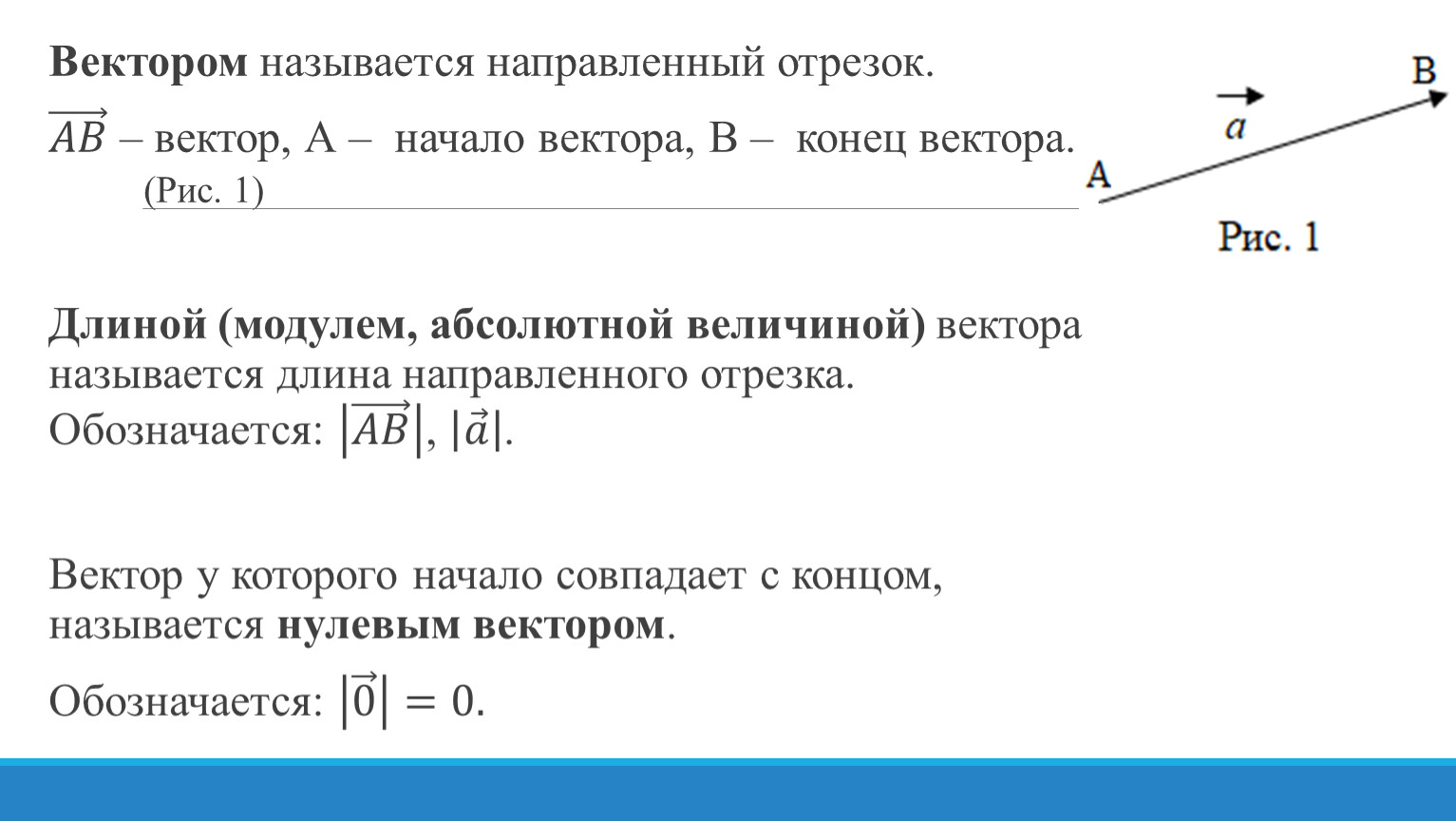
Вектором называется направленный отрезок.
𝐴𝐵 𝐴𝐴𝐵𝐵 𝐴𝐵 – вектор, А – начало вектора, В – конец вектора.
(Рис. 1)
Длиной (модулем, абсолютной величиной) вектора называется длина направленного отрезка. Обозначается: 𝐴𝐵 𝐴𝐵 𝐴𝐴𝐵𝐵 𝐴𝐵 𝐴𝐵 , 𝑎 𝑎 𝑎𝑎 𝑎 𝑎 .
Вектор у которого начало совпадает с концом, называется нулевым вектором.
Обозначается: 0 0 0 0 0 =0.
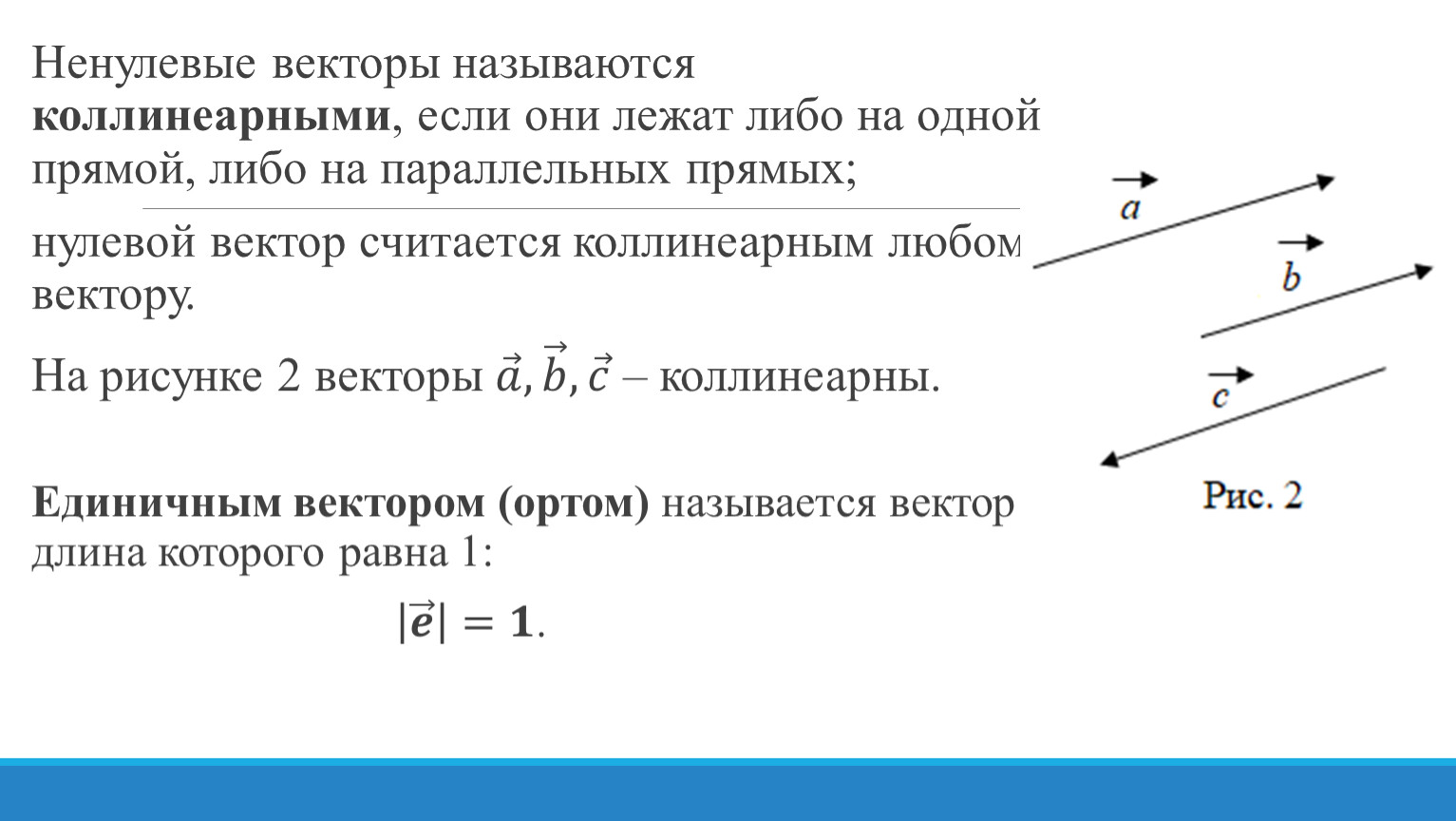
Ненулевые векторы называются коллинеарными, если они лежат либо на одной прямой, либо на параллельных прямых;
нулевой вектор считается коллинеарным любому вектору.
На рисунке 2 векторы 𝑎 𝑎𝑎 𝑎 , 𝑏 𝑏𝑏 𝑏 , 𝑐 𝑐𝑐 𝑐 – коллинеарны.
Единичным вектором (ортом) называется вектор 𝑒 𝑒𝑒 𝑒 , длина которого равна 1:
𝒆 𝒆 𝒆𝒆 𝒆 𝒆 =𝟏𝟏.
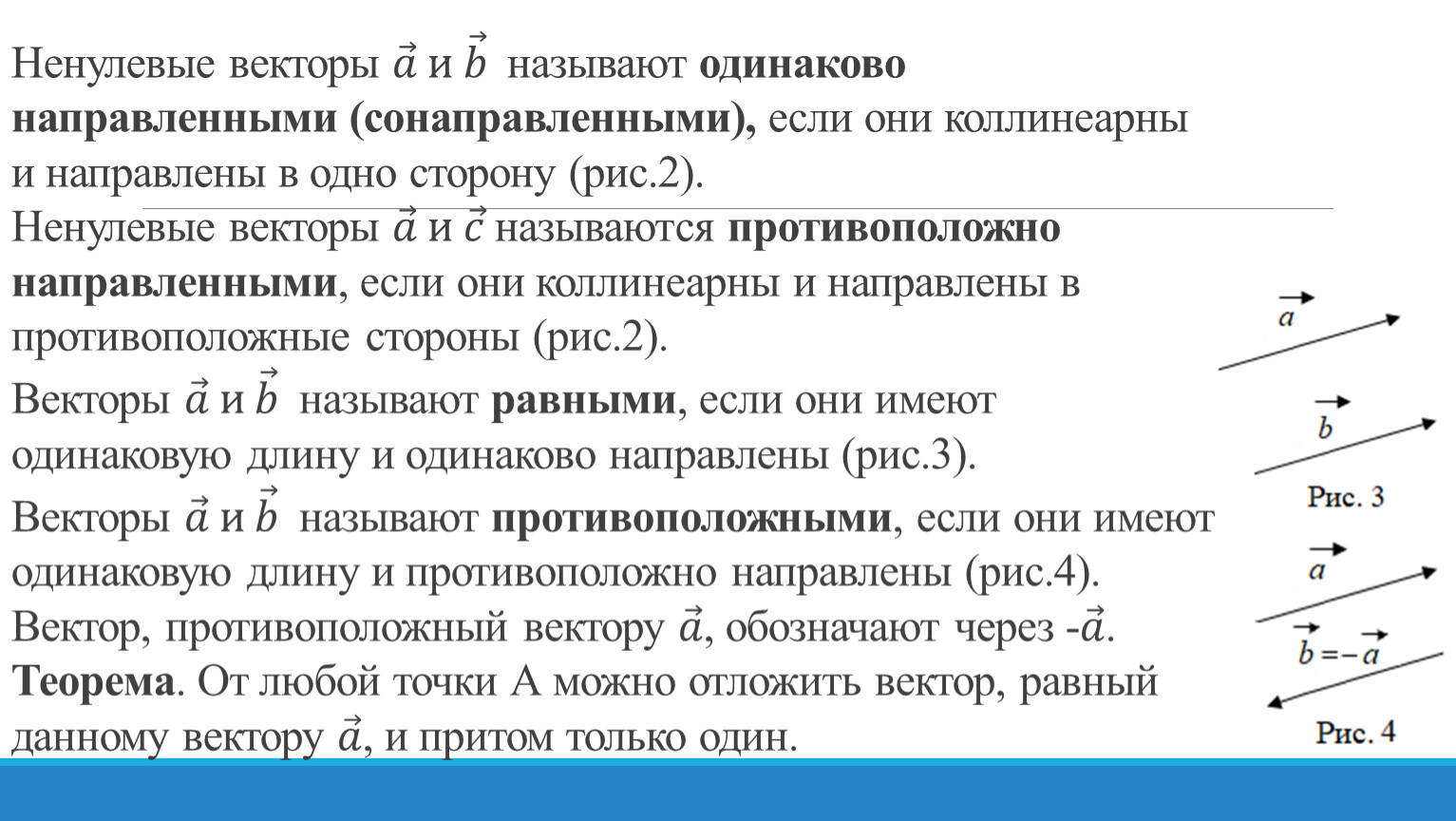
Ненулевые векторы 𝑎 𝑎𝑎 𝑎 и 𝑏 𝑏𝑏 𝑏 называют одинаково направленными (сонаправленными), если они коллинеарны и направлены в одно сторону (рис.2). Ненулевые векторы 𝑎 𝑎𝑎 𝑎 и 𝑐 𝑐𝑐 𝑐 называются противоположно направленными, если они коллинеарны и направлены в противоположные стороны (рис.2). Векторы 𝑎 𝑎𝑎 𝑎 и 𝑏 𝑏𝑏 𝑏 называют равными, если они имеют одинаковую длину и одинаково направлены (рис.3). Векторы 𝑎 𝑎𝑎 𝑎 и 𝑏 𝑏𝑏 𝑏 называют противоположными, если они имеют одинаковую длину и противоположно направлены (рис.4). Вектор, противоположный вектору 𝑎 𝑎𝑎 𝑎 , обозначают через - 𝑎 𝑎𝑎 𝑎 . Теорема. От любой точки А можно отложить вектор, равный данному вектору 𝑎 𝑎𝑎 𝑎 , и притом только один.
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
