Поделиться

Проект учебного/внеурочного занятия (опорной схемы) с краткими методическими рекомендациями по его реализации, контролю и оценке образовательных достижений обучающихся
ПРОЕКТ УЧЕБНОГО ЗАНЯТИЯ
Учебный курс Учитель (Ф. И. О.) ____ Литвинов Владимир Николаевич
Класс / Группа (возраст)___6 класс ___Продолжительность занятия___40_____________
Раздел программы ___ Труд (технология) _____________________________
Тема занятия: 52. Практическое занятие. Конструирование. Программирование поворотов робота
Цели занятия:
Воспитания:
• воспитание ответственности за выполнение задания, развитие к сотрудничеству и взаимопомощи, уважение к чужому мнению;
• формирование навыков взаимодействия в коллективе сверстников.
Развития:
• интереса к современному состоянию российской науки и технологии, к робототехнике и программированию;
• развитие алгоритмического мышления, умение анализировать и исправлять свои ошибки, опыт поиска ошибок в коде;
• опыт проектирования программы, подбор и комбинирование имеющихся умений для решения учебных задач;
Обучения:
• познакомить с алгоритмами поворотов робота (на месте, в движении),
• научить составлять программы для поворотов в среде программирования.
Планируемые результаты освоения содержания образования:
Личностные результаты освоения:
У учащихся будут сформированы:
• интерес к техническому творчеству, ответственность за результат;
• абстрактное мышление в приложении к программированию;
• навыки корректировки планов выполнения работы;
• умение работать в паре и в коллективе;
• умение формулировать, аргументировать и отстаивать своё мнение;
• умение совместно принимать решения внутри команды.
Мета предметные результаты освоения:
• Регулятивные
Учащиеся научатся:
• планировать (составлять план своей деятельности);
• рефлексировать (видеть проблему; анализировать сделанное – почему получилось, почему не получилось, видеть трудности, ошибки);
• оценивать правильность выполнения учебной задачи, собственные возможности её решения
Учащиеся научатся:
• Коммуникативные
• проявлять инициативу при поиске способа (способов) решения задачи;
• вступать в коммуникацию (взаимодействовать при решении задачи, отстаивать свою позицию, принимать или аргументировано отклонять точки зрения других).
Предметные результаты освоения:
• обучающиеся научатся конструировать простую модель робота по инструкции;
• определять параметры блока «Рулевое управление», необходимых для поворота приводной платформы на 90°, 180°, 270°, 360°.
• уметь проводить самооценку на основе критерия успешности учебной деятельности.
• корректировать программы при необходимости.
Тип занятия по ФГОС __ урок рефлексии
Форма проведения занятия ___ практикум ____________________________________
Ведущие методы:
• методы мотивации: проблемное изложение, анализ и решение проблемных ситуаций
• методы организации УПД: инструктаж, демонстрация, самостоятельная и практическая работа, групповая работа (в парах)
• методы контроля и самоконтроля: устный самоконтроль, самооценка и взаимооценка в группах.
Используемые ИКТ, пед. технологии: демонстрация видео, обсуждение, дискуссия, частично-поисковый.
Формы организации деятельности обучающихся: словесный, объяснительно-иллюстративный, обсуждение, мозговая штурм, практическая работа в группах (парах)
Цифровые образовательные ресурсы и ресурсы сети Интернет(ссылки)
• https://resh.edu.ru/
• https://iu.ru/video-lessons
• https://interneturok.ru/lesson
• https://www.niisi.ru/kumir/index.htm
• https://videouroki.net/razrabotki
Вид мультимедиа компонента: презентация, обучающие видеоуроки
Материально-техническое обеспечение (оборудование и материалы)
• столы, стулья по количеству обучающихся и 1 рабочее место для педагога;
• стол для полей, поля для соревнований роботов
• компьютеры для каждого обучающегося и преподавателя с установленной средой программирования (LEGO Mindstorms EV3);
• интерактивная доска/экран для демонстрации презентаций и видео
• доска маркерная;
• конструктор Lego «Mindstorms EV3: Базовый набор»;
• инструкции по сборке базовой платформы;
• демонстрационная модель робота;
Методика работы учителя с обучающимися на этапах учебного занятия
|
Деятельность учителя (используемые методы / приемы мотивации, активизации обучения, контроля и оценки) |
Деятельность обучающихся (осваиваемые методы учения, виды, формы, способы, приемы деятельности) |
Дидактическое сопровождение (средства обучения, организации УПД, задания) |
|
Мотивационно-целевой этап (мотивация, актуализация, целеполагание) |
||
|
I. Организационный момент (3 мин) - Приветствие, проверка готовности к уроку. Организует работу детей. - Создает позитивную атмосферу: - «Ребята, представьте мир, где роботы помогают людям повсюду: на заводах, в больницах, даже дома. Как вы думаете, что самое важное должен уметь любой робот, чтобы быть полезным? Давайте посмотрим видео и попробуем найти ответ!»
Мотивация: Для активации мышления и актуализации знаний Цель: показать практическую значимость темы, расширить кругозор Роботы вокруг нас Делит детей на группы (3–4 команды по 3–4 человека) За 1 минуту каждая группа записывает как можно больше примеров роботов/устройств, которым нужно поворачивать (дрон, робот‑газонокосилка, робот‑пылесос, манипуляторы, склады, больницы, космические станции и т. д.). Группы обмениваются списками, дополняют друг друга. Учитель добавляет необычные примеры (Автономная уборка (роботы-пылесосы, робот‑хирург, космос (марсоходы), логистика, сельское хозяйство)
II. Целеполагание и актуализация знаний (5мин) Совместное формулирование темы и цели урока через наводящие вопросы: Практикоориентированные вопросы и предполагаемые ответы: 1. Что общего во всех показанных роботах? Ожидаемый ответ: Они все поворачивают — объезжают препятствия, меняют направление. 2. Как вы думаете, почему поворот — это так важно для робота? Ожидаемый ответ: Без поворотов робот не сможет добраться до цели, объехать преграду. 3. Посмотрите на колёса робота. Что происходит с ними при повороте? Ожидаемый ответ: Одно колесо крутится вперёд, другое — назад или стоит. 4. А если оба колеса вращаются вперёд, но с разной скоростью? Ожидаемый ответ: «Робот поедет по дуге». 5. Какие параметры в программе могут влиять на то, как повернёт робот? Ожидаемый ответ: Скорость моторов, время работы, угол поворота. Вопрос: От чего, кроме программы, зависит поворот? Ожидаемый ответ: От веса робота, заряда батарей (мощность моторов), трения колес о поверхность и ширины колесной базы. 6. Где в реальной жизни точность поворота критически важна?» Ожидаемые ответы: «На складе (робот‑погрузчик), в космосе (марсоход), в хирургии (робот‑ассистент)». 7. Почему для беспилотного автомобиля ошибка в 2–3 градуса критична? Ожидаемый ответ: На большой дистанции малая ошибка превращается в метры. Робот может выехать на встречную полосу или врезаться в бордюр. Точность — это безопасность. 8. Финальный вопрос: Итак, главный вопрос сегодняшнего урока: Как заставить робота поворачивать? Какие идеи у вас есть? Запишем их на доске!» Как вы думаете какая будет сегодня тема урока? Тема: Конструирование. Программирование поворотов робота Целеполагание: ученики формулируют цель урока
Цель: Научиться программировать повороты робота») Задачи 1. Собрать робота 2. Написать программу поворота (на 90, 180 градусов) 3. протестировать её |
подготовка мышления учащихся и осознание ими потребности к выявлению причин затруднений в собственной деятельности
Интересные факты: - Марсоход поворачивает колёса с точностью до градуса, чтобы не застрять в песке». - На автомобильных заводах роботы сваривают детали кузова — если поворот будет неточным, машина получится кривой!»
Работа с доской: педагог записывает гипотезы учеников в виде тезисов: - Разные скорости колёс; - Вращение в противоположные стороны; - Запрограммировать угол 90∘, 180∘; - Использовать датчики для корректировки
|
демонстрация видео с роботами, выполняющими сложные манёвры, перечень вопросов для обсуждения |
|
Содержательно-деятельностный этап (открытие новых знаний, первичное закрепление, самостоятельная работа) |
||
|
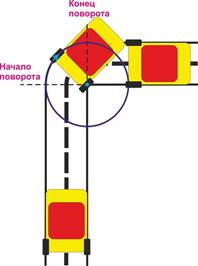
III. Изучение нового материала (7 мин) Повороты робота необходимы для адаптации к изменяющейся среде и выполнения сложных задач. - Принцип поворота робота. Объяснение, что поворот осуществляется за счёт разницы в скорости вращения колёс. Для поворота на месте один мотор работает в прямом направлении, а другой — в обратном.
Вариант поворота №1.
Работа с ЭОР: просмотр обучающего видео по программированию поворотов. Примеры кода в среде программирования (показ на экране): - Блок «Рулевое управление». Демонстрация блока в среде программирования, объяснение параметров: - «Мощность» (от -100 до 100): управляет скоростью движения. - «Руление» (от -100 до 100): определяет направление поворота (0 — прямо, положительные значения — вправо, отрицательные — влево). - Блок «Независимое управление моторами». Используется для точного контроля каждого мотора отдельно, что полезно при поворотах. - блок «Таймер» → установка времени работы; - блок «Градусы» → установка количества оборотов для точного поворота. Формулы для расчёта: - для поворота на 90∘: время работы моторов ≈ 0,5–1 секунды (зависит от модели робота); - для поворота на 180∘: время удваивается. Цикл. Объяснение, как с помощью цикла можно повторить набор действий Обсуждение: - Какие параметры в программе могут влиять на то, как повернёт робот? Ожидаемый ответ: Скорость моторов, время работы, угол поворота - как проверить правильность программы? Ожидаемый ответ: тестирование на разметке
IV. Практическая работа (20 мин) Для того чтобы достичь нашу цель, мы будем работать с компьютером, поэтому давайте повторим правила техники безопасности при работе с компьютером. Безопасность: напомните правила работы с техникой: «Не трогайте провода, следите, чтобы робот не упал со стола». Делит детей на команды (3–4 команды по 3–4 человека)
Задание для инженерных команд - «Внимание, команды! На планете Марс произошла авария на научной станции. Связь с экипажем потеряна, системы станции выходят из строя. Ваша задача — восстановить контроль над станцией и спасти её. Ваша задача — запрограммировать робота так, чтобы он прошёл маршрут, обойдя все препятствия. - Каждая команда получает Бортовой журнал — ваш главный помощник в миссии. - Удачи, космонавты! Распределить роли в команде: - лидер, - инженер(конструктор), - программист, - аналитик
Конструирование: работа в парах: - сборка базовой модели робота по инструкции или самостоятельно - проверка конструкции экспертами.
Программирование (15 мин): Команда 1. Навигаторы Инструкция: Ваш робот-исследователь “Орион-6” приземлился на планете Марс. При посадке он застрял в каменистой расщелине. Чтобы выбраться, ему нужно повернуть направо на 90° и проехать вперёд». Техническое задание: Напишите программу: - движение вперёд 1 секунда - поворот направо 90° - движение вперёд 1 секунда. Цель: научиться программировать поворот на заданный угол Протестируйте на тестовой площадке с разметкой «расщелины». Проверка: Робот должен развернуться строго на 90°. После разворота проехать по прямой линии без отклонений.
Команда 2. Разворот на 180° Инструкция: «Ваш робот-исследователь “Орион-6 подошёл к краю обрыва. Нужно развернуться и пойти в обратном направлении». Код/алгоритм: - вперёд 1 с - разворот 180° - вперёд 1 с Цель: применить знания на практике в нестандартной ситуации Подсказка: можно использовать два поворота на 90° или один на 180°. Проверка: - робот должен вернуться почти в исходную точку.
Команда 3. Маршрут с препятствиями Задача: запрограммировать движение по маршруту с двумя поворотами.
Инструкция: «Робот должен обойти зону радиации (обозначена красным) и добраться до образца минерала (зелёная точка). Маршрут: вперёд → налево → вперёд → направо → вперёд». Технические требования: Длина прямых участков: 1–2 секунды движения. Углы поворотов: 90°. Препятствие: квадрат 30×30 см. Цель: применить знания на практике в нестандартной ситуации Код: - вперёд 1 с - поворот налево 90° - вперёд 1 с - поворот направо 90° - вперёд 1 с Проверка: - Робот объезжает «радиацию» на расстоянии не менее 10 см. - Останавливается в пределах «образца» (зелёный круг диаметром 15 см). Команда 4. Замкнутый маршрут Задача: запрограммировать движение робота по квадрату (4 поворота на 90°).
Инструкция: «Активируйте протокол картографирования! Робот должен обследовать участок поверхности планеты по периметру и вернуться в исходную точку». Требования: Каждая сторона квадрата: 2 секунды движения. Все повороты: направо на 90°. Используйте цикл для повторения команд. Цель: применить знания на практике в нестандартной ситуации Код (с циклом): повторить 4 раза: вперёд 2 с поворот направо 90° конец цикла Проверка: - Робот проезжает квадрат и останавливается в пределах 10 см от стартовой точки. - Углы должны быть максимально прямыми. Методы: - работа в малых группах (2 человека), построение плана деятельности и планирование результата, мозговой штурм при решении нестандартных задач; - использование программных блоков для создания программы, - эксперимент. Экспериментальная часть (5 мин) Как может поворачивать робот?
V. Физкультминутка (1 мин) - Короткая разминка с имитацией движений робота (повороты на месте, шаги вперёд/назад). |
Слушают и осмысливают объяснения учителя смотрят демонстрацию по программированию поворота робота
Визуальная поддержка: на экране появляется слайд с чётко сформулированной целью и задачами
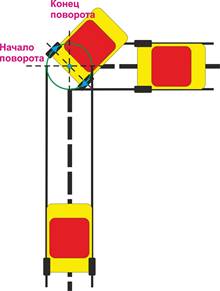
Вариант поворота №2 Во
втором варианте для поворота мы будем вращать колеса в разные стороны. В
этом случае значительно уменьшается радиус поворота. Робот разворачивается
практически вокруг своей оси.
Чтобы робот вращался на месте как трактор используется реверсивный поворот, когда один мотор двигается в одну сторону, а другой в противоположную. Чтобы мотор начал вращаться назад, необходимо выставить мощность -100. Чтобы обеспечить движение робота назад, устанавливаем отрицательную мощность обоих моторов
собирают базовую платформу EV3 в соответствии с указаниями буклета (с руководством по сборке); проверяют подвижность модели; проверяют, что провода не касаются подвижных частей робота и что все шины установлены правильно
Каждая команда получает робота, компьютер и Бортовой журнал (задание для команды) o Программируют поворот на 90 градусов с помощью блока «Рулевое управление» или «Независимое управление моторами». o Тестируют программу на разметке, корректируют параметры (градусы, мощность), если робот не выполняет поворот точно. При ошибке — корректируют код и повторяют тест. экспериментируют с моделью тестируют программу на практике, выявляют и исправляю ошибки
Каждая команда получает робота, компьютер и Бортовой журнал (задание для команды) o Программируют поворот на 90 градусов с помощью блока «Рулевое управление» или «Независимое управление моторами». o Тестируют программу на разметке, корректируют параметры (градусы, мощность), если робот не выполняет поворот точно. При ошибке — корректируют код и повторяют тест. экспериментируют с моделью тестируют программу на практике, выявляют и исправляю ошибки
Каждая команда получает робота, компьютер и Бортовой журнал (задание для команды) o Программируют поворот на 90 градусов с помощью блока «Рулевое управление» или «Независимое управление моторами». o Тестируют программу на разметке, корректируют параметры (градусы, мощность), если робот не выполняет поворот точно. При ошибке — корректируют код и повторяют тест. экспериментируют с моделью тестируют программу на практике, выявляют и исправляю ошибки
экспериментируют с моделью тестируют программу на поле выявляют и исправляю ошибки Выполняют задание № 23 и заполняют таблицу 7 Выполняют задание № 24 и заполняют таблицу 8
Короткая разминка |
Демонстрация программирования поворота робота на интерактивной доске
Приложение 2. Вводный инструктаж по ТБ (для практической части)
инструкции по сборке базовой платформы
Приложение 4. Задачи для инженерных команд Приложение 7. Программные блоки Приложение 8. Примеры заданий эталон (образец) для самопроверки критерии оценки коррекция учащимися своих ошибок в самостоятельной работе компьютеры с установленной средой программирования Приложение 7. Программные блоки Приложение 8. Примеры заданий эталон (образец) для самопроверки
Приложение 4. Задачи для команд Приложение 7. Программные блоки Приложение 8. Примеры заданий эталон (образец) для самопроверки критерии оценки коррекция учащимися своих ошибок в самостоятельной работе компьютеры с установленной средой программирования
Приложение 4. Задачи для команд Приложение 7. Программные блоки Приложение 8. Примеры заданий эталон (образец) для самопроверки критерии оценки коррекция учащимися своих ошибок в самостоятельной работе компьютеры с установленной средой программирования (LEGO Mindstorms EV3
|
|
Рефлективность-оценочный этап (оценка результатов деятельности, рефлексия содержания, способов деятельности, эмоционального состояния) |
||
|
VI. Демонстрация и обсуждение (10 минут) Презентация результатов: Демонстрация результатов: каждая группа показывает работу робота. Обсуждение: Вопрос: Как высокая скорость влияет на точность? Почему робота «заносит»? - Ожидаемый ответ: У робота есть инерция. Если он едет быстро, он не может мгновенно остановиться и «проскакивает» нужную точку. Вопрос: Какое математическое действие поможет рассчитать время? - Ожидаемый ответ: Составление пропорции. Если за 1 секунду робот поворачивает на 45 градусов, то для 90 градусов нужно 2 секунды. - Вопрос: Как работа в паре помогла найти ошибку? Ожидаемый ответ: Один следил за движением робота («глаза»), а второй проверял код («мозг»). Мы обсуждали идеи и видели ошибки друг друга быстрее Вопрос: Где в реальной жизни применяются роботы с программируемыми поворотами? - Ожидаемый ответ: космос, логистика, сельское хозяйство … Оценка работы групп (активность, точность выполнения, командная работа).
VII. Домашнее задание (вариативное) - Базовый уровень: составить алгоритма для движения робота по треугольнику. - Повышенный уровень: составить программу для движения по произвольной траектории (змейке, спирали) и описать её в тетради. - Творческий уровень: - придумать задачу для робота (например, объехать препятствие) и предложить способ её решения с помощью поворотов.
VIII. Подведение итогов (3 мин) - Анализ достижения цели урока: «Чему мы научились сегодня?» - Обобщение: связь изученного с реальной жизнью (роботы-пылесосы, промышленные манипуляторы, беспилотные автомобили, медицина). - Представьте робота-хирурга: какова там цена ошибки в один градус при повороте манипулятора? - Комплексное оценивание: оценка за практическую работу, активность на уроке, качество программы.
Рефлексия: Какое открытие вы сделали сегодня для себя: программировать робота проще или сложнее, чем вы думали изначально. Что нового узнали, какие навыки развили.
Ученики заполняют короткую анкету: Ребята, выскажите, пожалуйста, своё мнение о нашем занятии, дополнив понравившуюся вам фразу своими мыслями: - Что нового я узнал …. - Было интересно… - Было понятно … - Что вызвало трудности… - Теперь я могу…
|
- Группы демонстрируют свои программы классу. - Обсуждают, какие сложности возникли и как они были решены. - Сравнивают разные подходы к решению задачи (например, использование разных блоков для поворота).
Формулы для расчёта: для поворота на 90∘: время работы моторов ≈0,5–1 секунды (зависит от модели робота); для поворота на 180∘: время удваивается
Записывают вариативное домашние задание задают вопросы по домашнему заданию
Самооценка и взаимооценка работы в группе.
Подсчитайте свои баллы и выставьте оценки.
Подводят итоги совместной и индивидуальной деятельности и оценивают личный вклад в совместную деятельность Ученики сами оценивают результат по «Чек-листу успеха»: - Мой робот повернул точно? - Я понял зависимость времени от угла? - Я помог напарнику? Высказывают своё мнение о занятии, дополнив понравившуюся вам фразу своими мыслями. Наводят порядок на своем рабочем месте Рефлексивная мишень на доске. Задание: выйти к доске и используя смайлики показать свою эмоцию по уроку. |
Приложение 14. Домашнее задание (вариативное)
Приложение 11. Вопросы для закрепления материала Приложение 13. Оценочный лист моделей; Приложение 14. Бланк наблюдения за обучающимися
Приложение 15. Список открытых вопросов
Приложение 16. Лист оценки финального проекта обучающихся критерии оценки: - активность, - помощь товарищу, - аккуратность и правильность программы |
Методические рекомендации по реализации проекта учебного занятия ______
Безопасность:
• Приложение 2. Вводный инструктаж по ТБ (для практической части)
Ребята, наше учебное пространство — это современная лаборатория. Прежде чем приступить к программированию поворотов, вспомним три правила безопасности:
1. Порядок на столе — порядок в коде. Все детали конструктора, которые вы не используете в данный момент, должны находиться в лотках. Не допускайте падения мелких деталей на пол, чтобы никто не споткнулся и не повредил оборудование.
2. Бережное подключение. При соединении робота с компьютером и установке аккумуляторов не прилагайте чрезмерных усилий. Если кабель не вставляется — позовите меня, не ломайте разъемы. Убедитесь, что провода не свисают со стола и не мешают движению робота.
3. Безопасный полигон. Для тестирования поворотов мы используем общую зону на полу. Перемещаемся к ней спокойно, не бегаем. Если на траектории уже находится чужой робот — подождите своей очереди. Уважение к труду товарища — залог общего успеха.
Помните: вы несете ответственность за сохранность своих роботов и комфорт соседей по парте. Если заметили неисправность или запах гари — немедленно отключите питание и поднимите руку».
Напоминает о правилах командной работы:
- слушать друг друга;
- распределять роли (программист, тестировщик, аналитик);
- помогать соседям, если у них возникли трудности
Дифференциация и адаптация:
• для слабых учеников:
Для слабомотивированных учеников:
- готовые блоки кода, пошаговые инструкции, помощь педагога;
- акцент на игровой элемент (соревнование, награды), упрощённые задания.
- Приложение 7. Программные блоки.
- Приложение 8. Примеры заданий
- Для сильных учеников: дополнительные задания:
Для активных учеников:
- дополнительные «секретные миссии» (например, запрограммировать поворот на нестандартный угол 37∘).
- Дополнительные задания (по выбору)
Приложение 9. Карточки Аварийных ситуаций
1. Миссия невыполнима?
Суть: задача с ограничением, требующая нестандартного подхода.
учитель ставит задачу: «Роботу нужно повернуть на 180°, но у него сломался один мотор. Как это сделать?»
Ученики предлагают решения («Вращать работающий мотор в обратную сторону и т. д.), обсуждают плюсы и минусы
Учитель подводит к идее дифференциального привода (разная скорость моторов для поворота).
2. Экстренная посадка: робот должен остановиться перед препятствием (красный квадрат).
3. Сбор данных: при достижении точки робот издаёт звуковой сигнал.
Цель: развить креативность, показать реальные инженерные решения
__________________________________________________________________________________
Дидактическое сопровождение:
Пример дидактических средств и заданий на мотивацию
Для активации мышления и актуализации знаний
Цель: показать практическую значимость темы, расширить кругозор
1. Роботы вокруг нас
Ученики делятся на группы.
За 1 минуту каждая группа записывает как можно больше примеров роботов/устройств, которым нужно поворачивать (дрон, робот‑газонокосилка, автопогрузчик, манипулятор и т. д.).
Группы обмениваются списками, дополняют друг друга.
Педагог добавляет необычные примеры (Автономная уборка (роботы-пылесосы) робот‑хирург, склады, больницы, космические станции, марсоходы)
__________________________________________________________________________________
Пример дидактических средств и заданий для освоения учебного материала, способов деятельности (1-2)
2. Практическая работа. Эксперимент.
- Деятельность: Ученики настраивают базовую модель. Программируют поворот на 90 градусов «на глаз».
- Самостоятельность: Роботы не попадают в разметку. Учитель не дает верный ответ, а предлагает алгоритм исправления ошибок: «Замерь отклонение — измени параметр — проверь снова».
- Динамика: Разрешено свободное передвижение по классу к тестовым полигонам на полу
3. «Найди ошибку»
- ученики ищут и исправляют ошибки в готовом алгоритме. На экране —код программы для поворота, в котором есть 1–2 ошибки (например, указан неправильный угол или время работы моторов).
- Ученики находят ошибку, объясняют, к чему она приведёт («Робот повернёт не на 90°, а на 45°»), и предлагают исправление.
- Цель: развить критическое мышление, внимание к деталям, понимание причинно‑следственных связей.
4. Приложение 10. Кроссворд Состав набора Lego Mindstorms EV3
5. Эмоциональный стимул и правила работы
Учитель показывает «бортовой журнал оператора» (с заданиями для команд).
Объясняет систему поощрений:
- за точное выполнение задания — «звёздный балл» (отметка в журнале);
- за креативное решение — «бонус‑астероид» (дополнительный балл);
- команда‑победитель получает звание «Лучший экипаж Марса» и грамоты (бумажные или цифровые).
_________________________________________________________________________________
Пример дидактических средств для проведения рефлексии, заданий для оценки уровня освоения учебного материала, способов деятельности (1-2)
6. Квест
Последовательное решение мини‑задач с подсказками.
1. Как провести: создать 3–4 карточки с заданиями возрастающей сложности:
· Карточка 1: «Запрограммируй поворот направо на 90°» (базовый блок).
· Карточка 2: «Сделай так, чтобы робот повернул налево, потом направо» (последовательность).
· Карточка 3: «Напиши программу для разворота на 180°» (нестандартный угол).
2. Ученики проходят Квест по порядку, получая следующую карточку после верного решения.
Цель: дифференцировать нагрузку, дать ощущение прогресса
Приложение 11. Вопросы для закрепления материала
Приложение 13. Карточки с заданиями возрастающей сложности
______________________________________________________________________________
Особые рекомендации по методике проведения занятия, по применению дидактического сопровождения в зависимости от темы и типа учебного занятия в соответствии с методической целью по этапам учебного занятия.
Например, на этапе мотивации обучающихся к учебной деятельности, что должен предусмотреть, продумать, подготовить, учесть педагог, чтобы обеспечить формирование устойчивой мотивации к обучению на данном занятии:
Развитие вопроса «Как вы думаете, как заставить робота поворачивать?»
После демонстрации видео вопрос можно развернуть в серию наводящих вопросов для активизации мышления:
• На основе наблюдений:
Что происходит с колёсами робота в момент поворота? Одинаково ли они вращаются?
Как вы думаете, почему робот иногда поворачивается на месте, а иногда — плавно, по дуге?
• С опорой на физику:
Если оба колеса вращаются вперёд с одинаковой скоростью — куда поедет робот?
А если одно колесо остановится?
Что будет, если одно колесо поедет вперёд, а другое — назад?
• С переходом к программированию:
Какие параметры в программе могут влиять на поворот?
(мощность моторов, время работы, количество оборотов)
Как задать роботу угол поворота, например, 90∘?
Что для этого нужно знать о конструкции робота?»
• Практикоориентированные:
Представьте, что роботу нужно объехать препятствие.
Какие повороты ему понадобятся?
Где в реальной жизни важно, чтобы робот поворачивал точно? (склады, больницы, космические станции)»
__________________________________________________________________________________
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.