Поделиться

Робот предназначен для игры в боулинг. Правила игры такие же, как и в обычном боулинге, только бросок осуществляет не человек, а робот-машина. Играть можно одному или с соперником дистанционно, каждый у себя дома.
Устройство управления состоит из блока EV3 и четырех датчиков касания, симметрично расположенных по краям блока. Между датчиками находится рычаг, который нажимает кнопки датчика касания.
Датчики, подключенные к портам 1-2, отвечают за движение вперед-назад. Датчики 3-4 управляют моторами раздельно для осуществления поворота налево-направо. Центральная кнопка блока EV3 запускает программу удара.
Программа для джойстика:
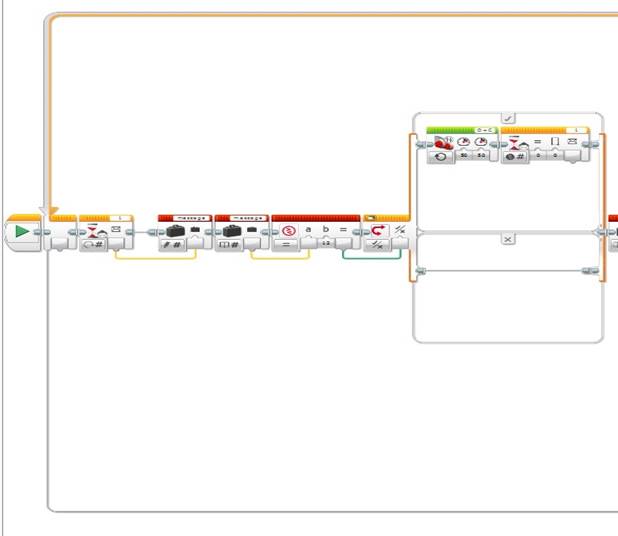
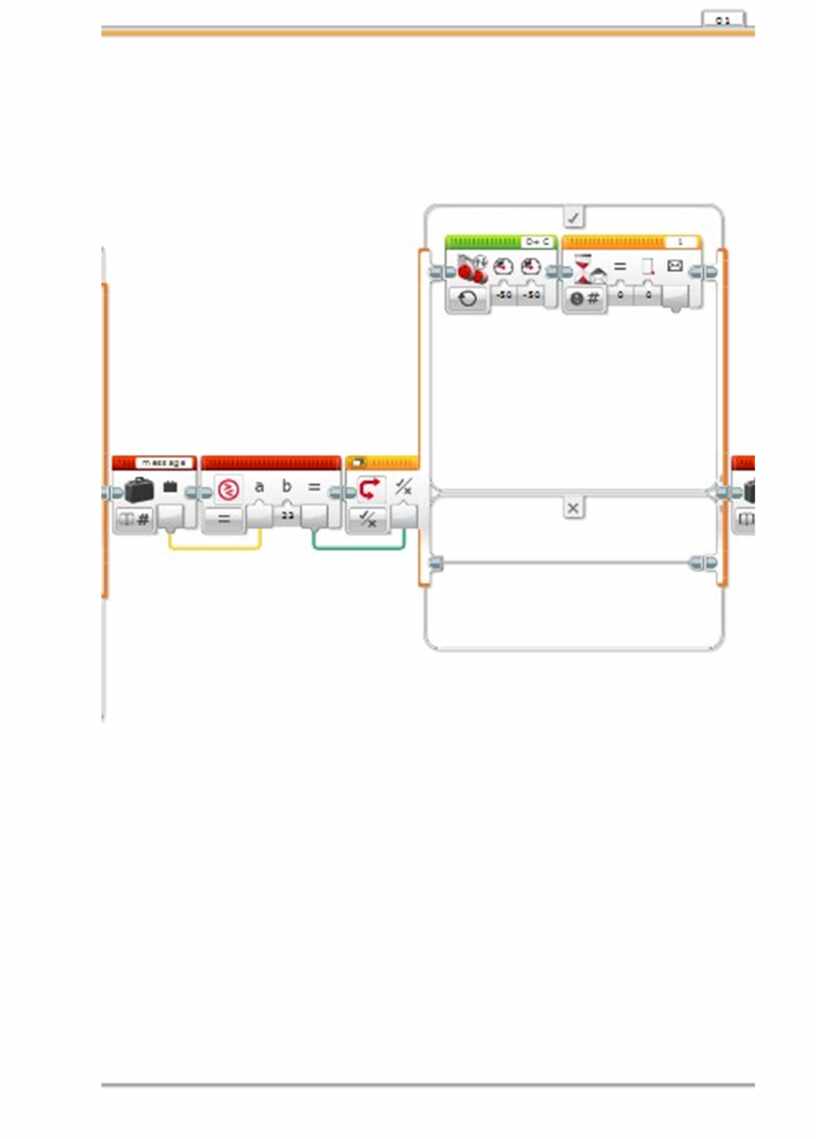
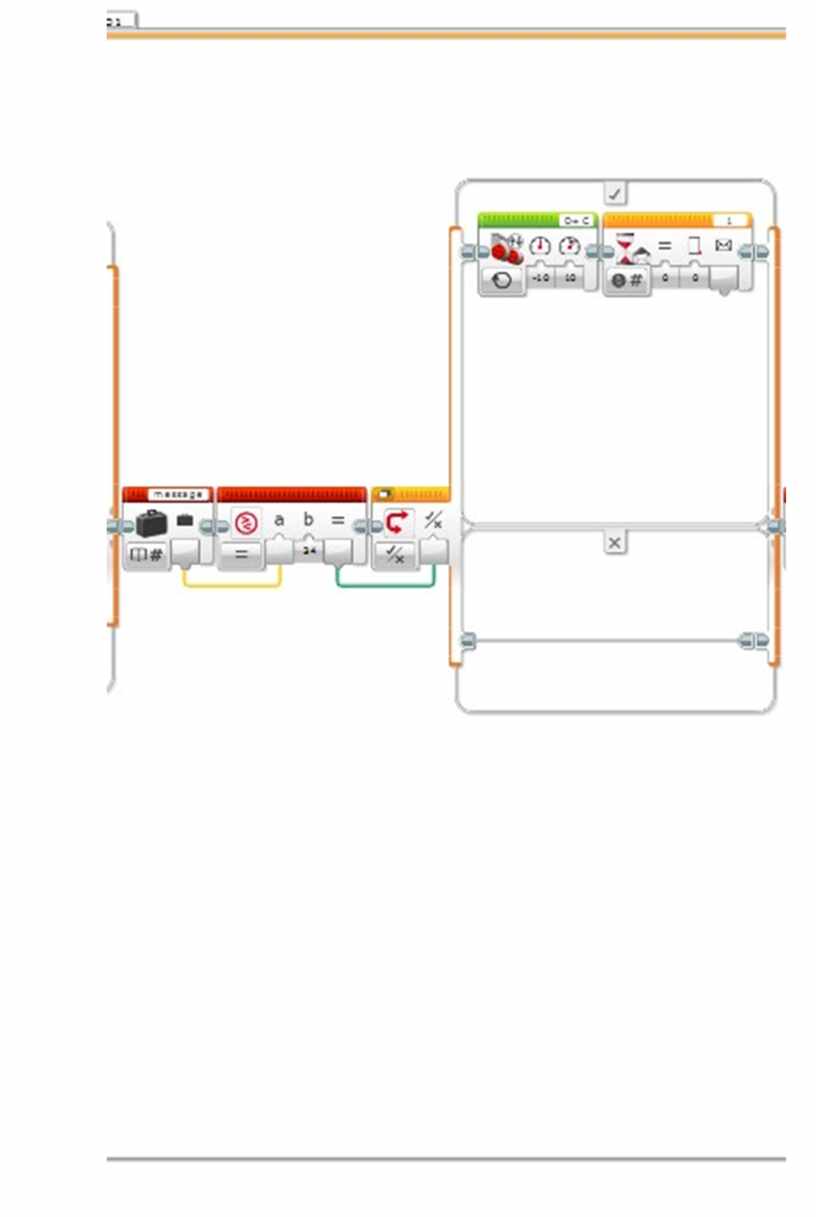
Для управления джойстиком используется циклический оператор. В цикле вначале стоит ветвление, которое проверяет состояние датчика касания (1 порт). Если касание было, программа прочитывает это как «истина» и передает сообщение, запускающее нужный мотор. Если касания не было, то программа читает это как «ложь» и идет по нижней ветке, где поочередно проверяет состояние оставшихся датчиков касания (порты 2-4). И дальше в цикле ожидает новых нажатий датчиков касания.
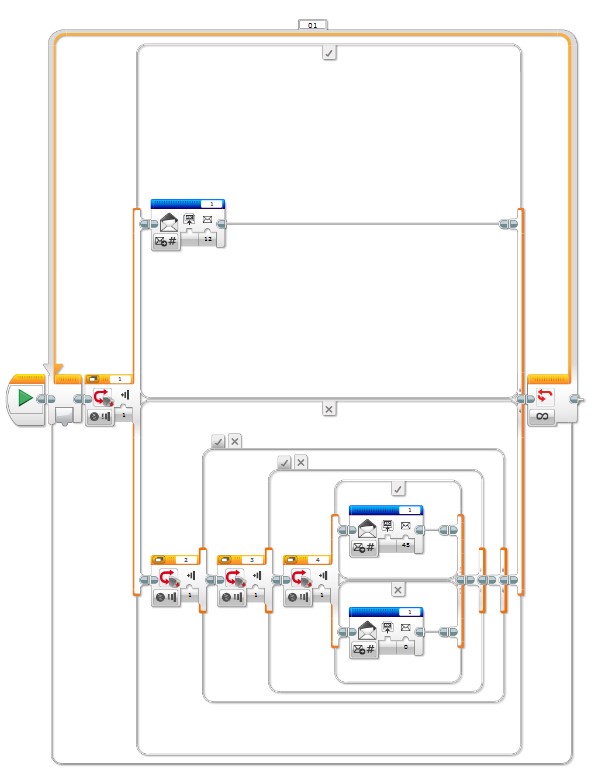
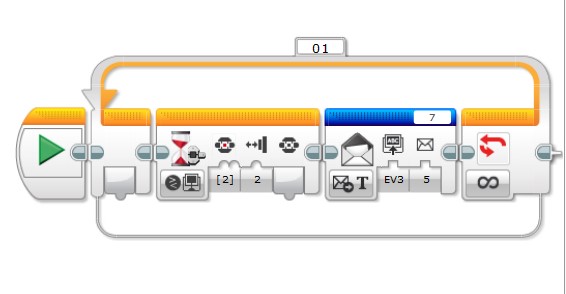
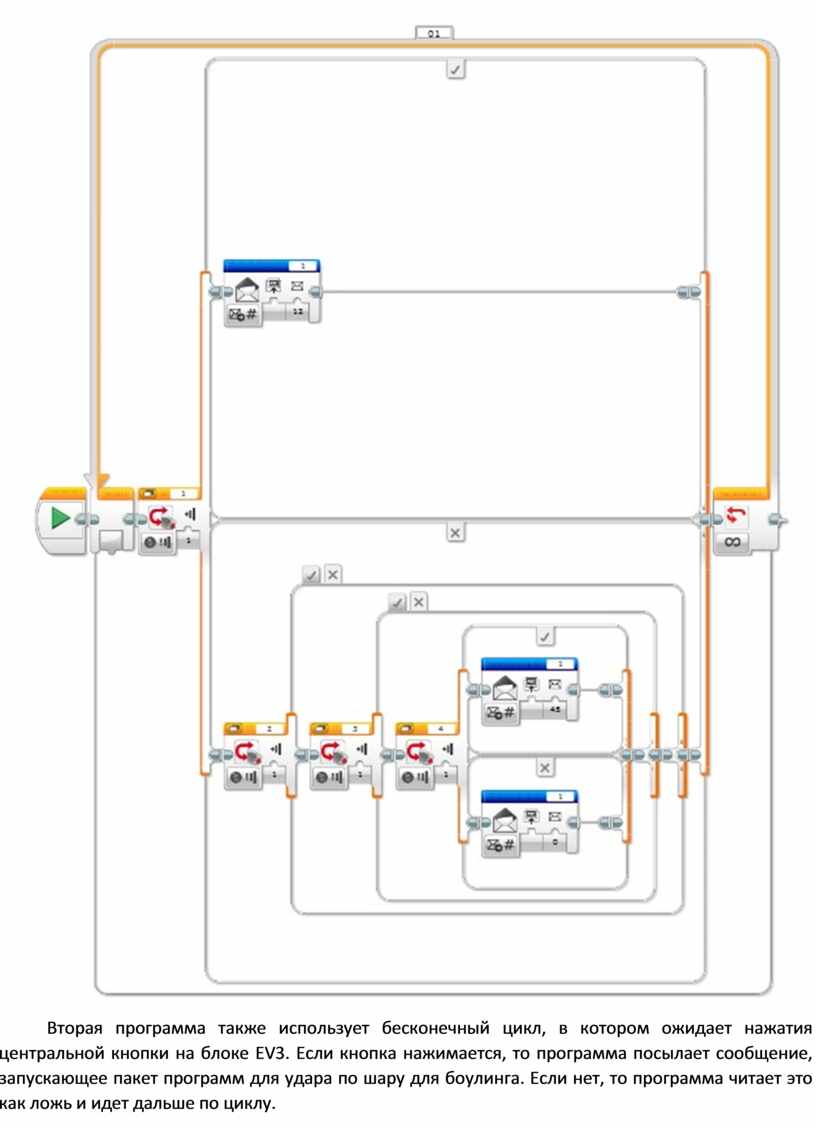
Вторая программа также использует бесконечный цикл, в котором ожидает нажатия центральной кнопки на блоке EV3. Если кнопка нажимается, то программа посылает сообщение, запускающее пакет программ для удара по шару для боулинга. Если нет, то программа читает это как ложь и идет дальше по циклу.
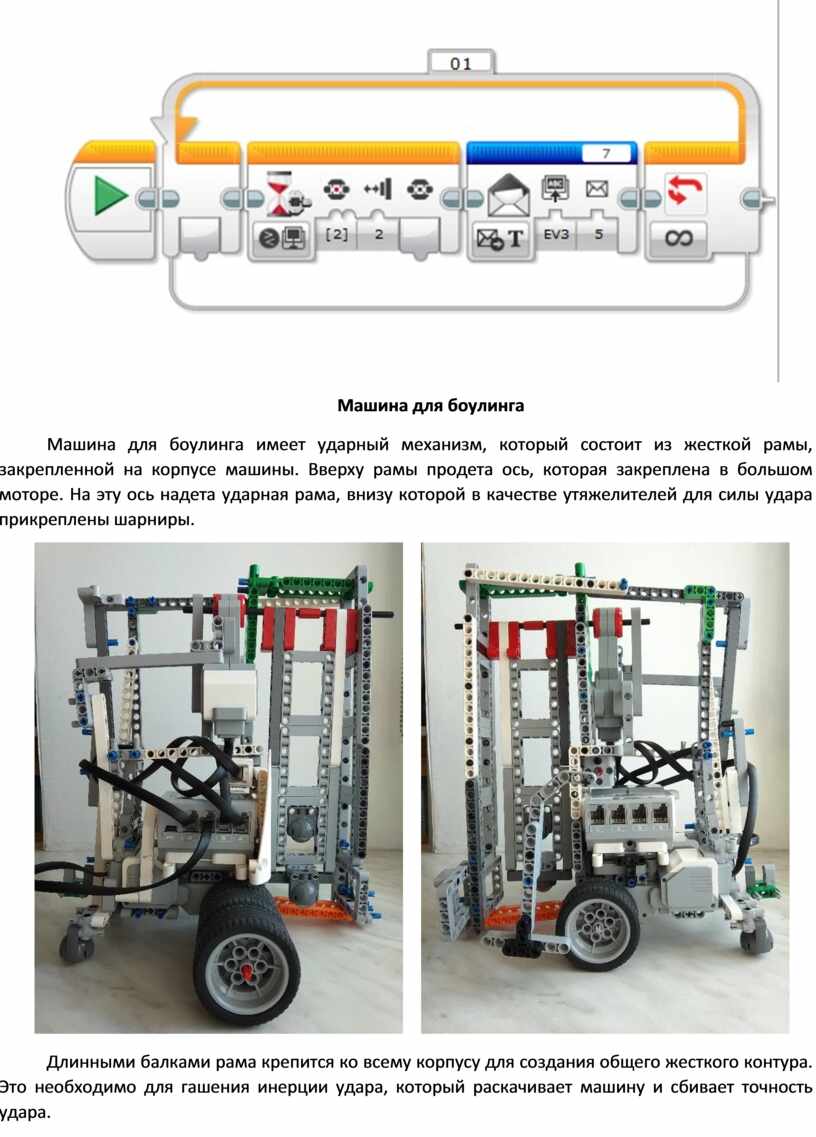
Машина для боулинга имеет ударный механизм, который состоит из жесткой рамы, закрепленной на корпусе машины. Вверху рамы продета ось, которая закреплена в большом моторе. На эту ось надета ударная рама, внизу которой в качестве утяжелителей для силы удара прикреплены шарниры.
Длинными балками рама крепится ко всему корпусу для создания общего жесткого контура. Это необходимо для гашения инерции удара, который раскачивает машину и сбивает точность удара.
Для этой же цели мы применили необычное конструкторское решение: оснастили большой мотор со стороны удара дополнительными колесами. Это позволило увеличить площадь опоры и придало конструкции дополнительную устойчивость, потому что крайняя точка ударного механизма уже не выступает при ударе далеко за машину. Также, это дало дополнительную массу машине. Дополнительные колеса не оказывают влияния на точность движения машины.
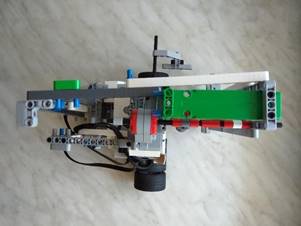
Сами колеса приводятся в движение двумя большими моторами. К блоку управления прикреплен средний мотор, который открывает заслонку отсека транспортировки шара для боулинга.

Программа для машины:
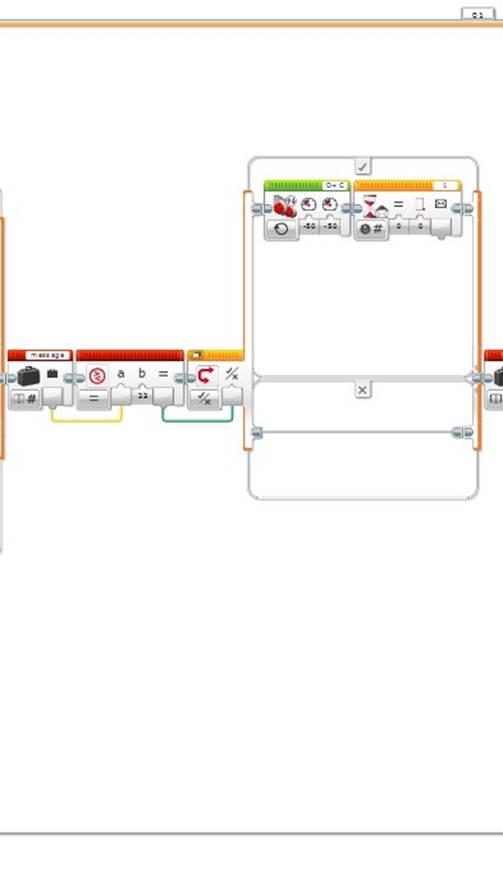
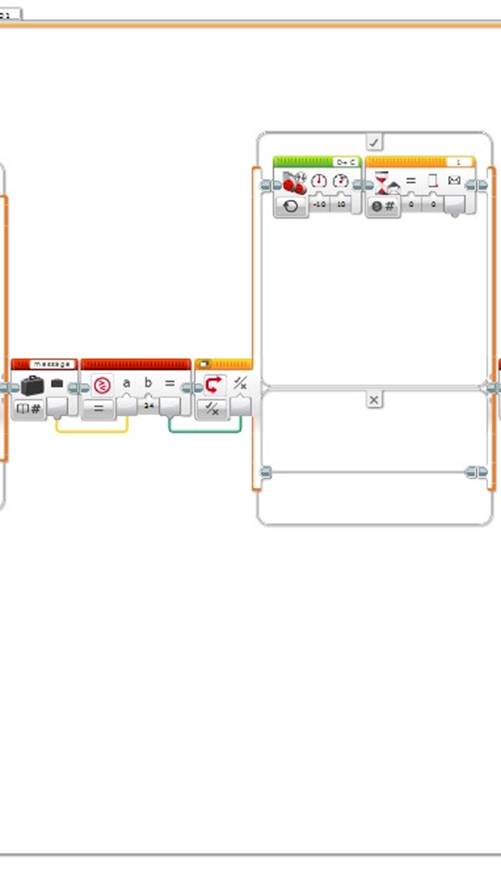
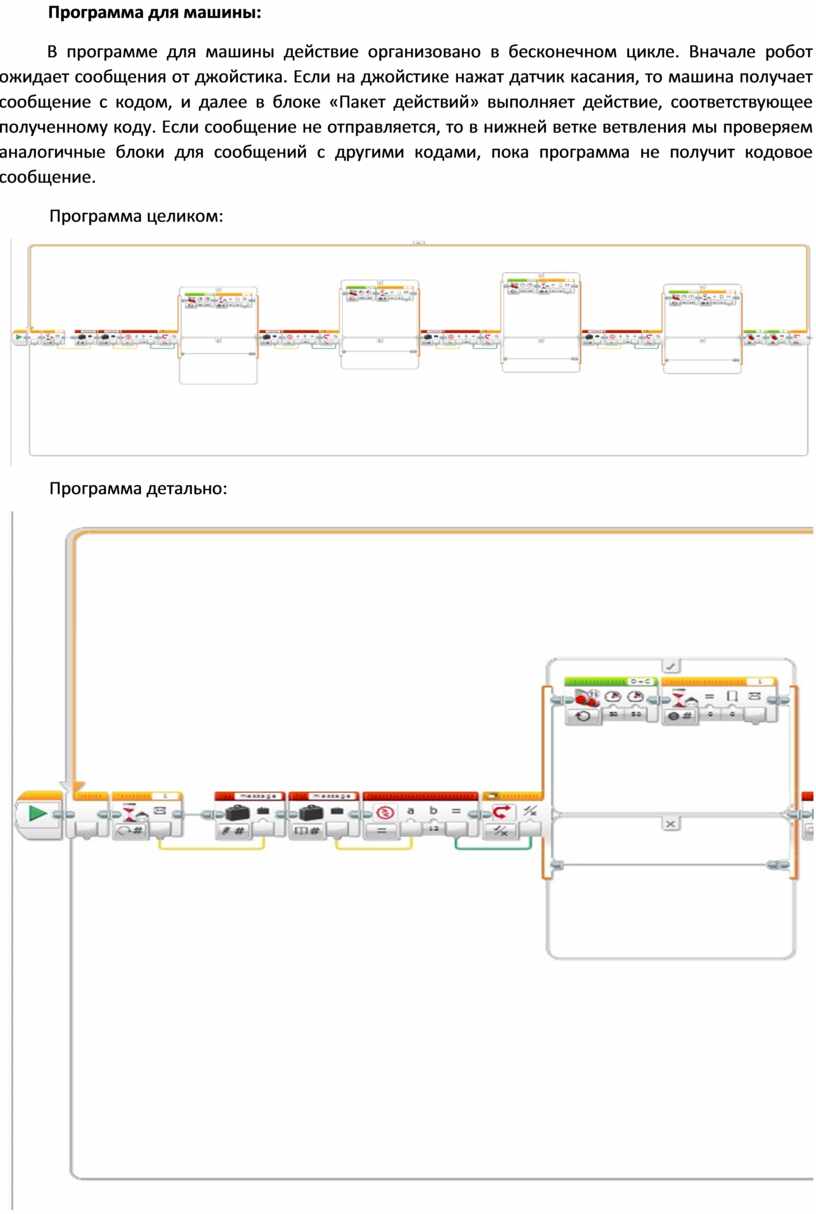
В программе для машины действие организовано в бесконечном цикле. Вначале робот ожидает сообщения от джойстика. Если на джойстике нажат датчик касания, то машина получает сообщение с кодом, и далее в блоке «Пакет действий» выполняет действие, соответствующее полученному коду. Если сообщение не отправляется, то в нижней ветке ветвления мы проверяем аналогичные блоки для сообщений с другими кодами, пока программа не получит кодовое сообщение.
Программа целиком:
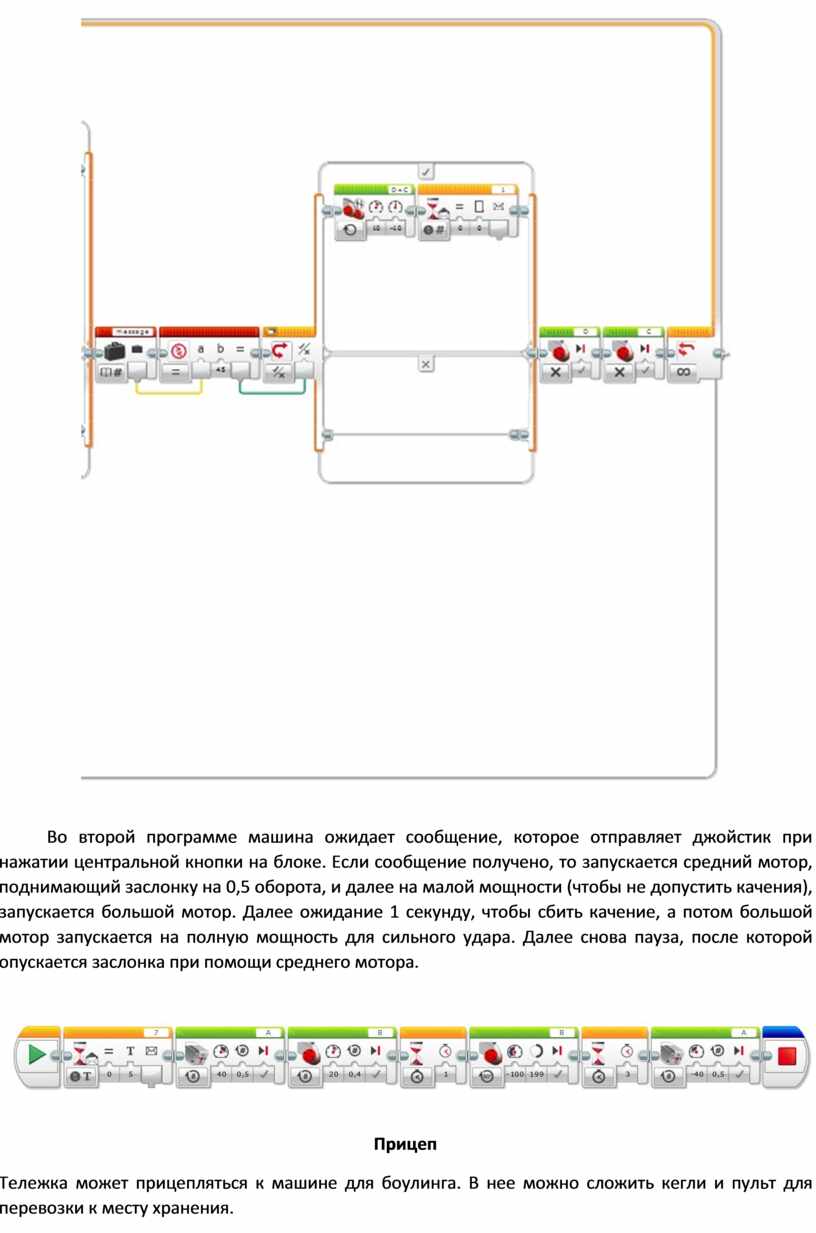
Программа детально:
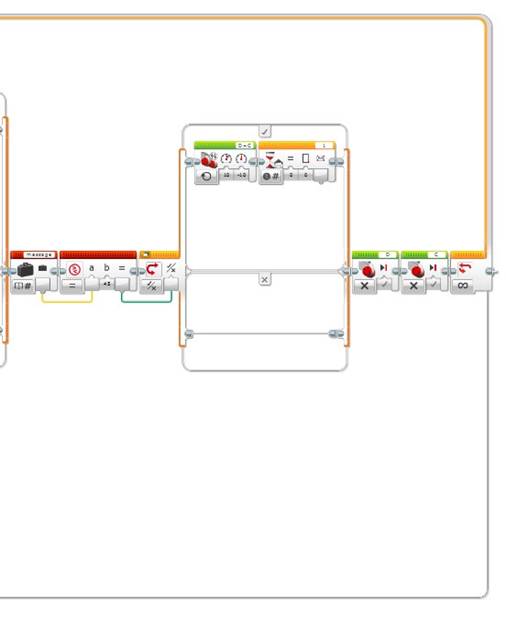
Во второй программе машина ожидает сообщение, которое отправляет джойстик при нажатии центральной кнопки на блоке. Если сообщение получено, то запускается средний мотор, поднимающий заслонку на 0,5 оборота, и далее на малой мощности (чтобы не допустить качения), запускается большой мотор. Далее ожидание 1 секунду, чтобы сбить качение, а потом большой мотор запускается на полную мощность для сильного удара. Далее снова пауза, после которой опускается заслонка при помощи среднего мотора.

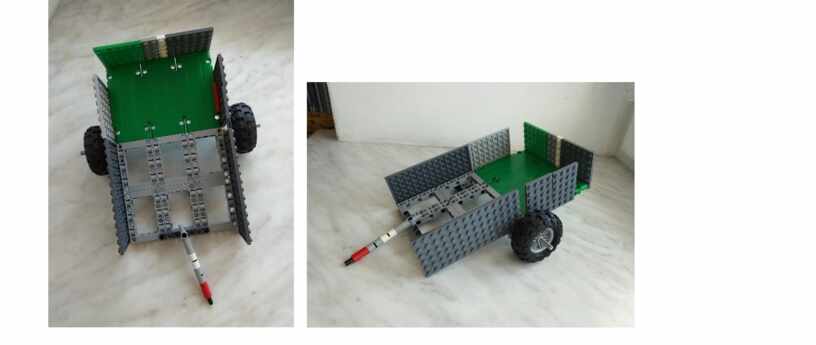
Тележка может прицепляться к машине для боулинга. В нее можно сложить кегли и пульт для перевозки к месту хранения.


Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.