

Научно-исследовательская работа: Шагающий механизм
Цель (проблема) данного исследования: провести сравнение шестиногих и четырехногих роботов.
Задачи:
• Собрать информацию о шагающих роботах;
• Создать действующую модель шестиногого шагающего робота;
• Создать действующую модель четырехногого шагающего робота
• Проанализировать принцип работы;
Актуальность данной темы обусловлена тем, что шагающие роботы приобретают всеобщую популярность. Созданием шагающих роботов и управлением их движения занимаются многие ученые, улучшая разработанные ранее двуногие, четерехногие и шестиногие шагающие механизмы.
Новизна данной темы в том, что действующие модели четырехногого и шестиногого шагающих механизмов, созданные из элементов конструктора LEGO, дают возможность увидеть, как работает шагающий механизм, и понят разницу между четырехногим и шестиногим шагающим механизмом.
ШМ.docx
КОНФЕРЕНЦИЯ
НАУЧНОИССЛЕДОВАТЕЛЬСКИХ И ТВОРЧЕСКИХ РАБОТ
«ПЕРВЫЕ ШАГИ В НАУКЕ»
Шагающий механизм
Направление: техническое творчество
Выполнил: Шаламов Данил Денисович, ученик 4 класса
МАУ ДО ДЮЦ «Ровесник», объединение «Образовательная робототехника»
Руководитель: Красных Алена Олеговна,
Педагог ДО МАУ ДО ДЮЦ «Ровесник»
Красноуральск. Оглавление
2019г.
Введение...................................................................................................................3
1. Теоретическая часть............................................................................................5
1.1. Шагающий робот...............................................................................................5
1.2 Примеры шагающих механизмов......................................................................6
2. Практическая часть............................................................................................10
Заключение.............................................................................................................12
Список литературы:...............................................................................................13
Приложения.........................................................................................................14
2 Введение
В настоящее время практически во всех промышленно развитых странах интенсивно
ведутся работы по созданию и исследованию шагающих роботов. Это вызвано тем, что
шагающие машины по сравнению с традиционными колёсными и гусеничными машинами
имеют ряд преимуществ перед традиционными транспортными средствами при движении
по поверхности со сложным рельефом, такими как пресечённая местность, завалы, а также
внутри зданий и сооружений, где необходимо перемещаться по лестницам и узким
коридорам и шахтам. Кроме того шагающие роботы уменьшают губительное воздействие
на плодородный слой земли при движении. Эти особенности машины с шаговым движением
могут быть востребованы при создании сельскохозяйственных роботов.
Актуальность данной темы обусловлена тем, что шагающие роботы приобретают
всеобщую популярность. Созданием шагающих роботов и управлением их движения
занимаются многие ученые, улучшая разработанные ранее двуногие, четерехногие и
шестиногие шагающие механизмы.
Новизна данной темы в том, что действующие модели четырехногого и шестиногого
шагающих механизмов, созданные из элементов конструктора LEGO, дают возможность
увидеть, как работает шагающий механизм, и понят разницу между четырехногим и
шестиногим шагающим механизмом.
Цель (проблема) данного исследования: провести сравнение шестиногих и
четырехногих роботов.
Задачи:
Собрать информацию о шагающих роботах;
Создать действующую модель шестиногого шагающего робота;
Создать действующую модель четырехногого шагающего робота
Проанализировать принцип работы;
Для этого мне понадобилось изучение комплекта LEGO Education «Mindstorms
EV3». Анализ принципа работы шагающего механизма средствами дополнительной
литературы и поиска информации в сети «Интернет».
1 этап: погружение в проблему. На этом этапе мы установили, за счет чего работает
шагающий механизм и для чего он необходим.
2 этап: поисковотеоретический. На данном этапе мы изучили литературу об
исследуемом объекте, принципе его работы, и основные составляющие элементы.
3 этап: Сборка действующих моделей шагающего механизма.
3 4 этап: Обобщающий. Результаты проведенной работы.
Выдвигаемая мною гипотеза исследования: шестиногий робот пройдет один метр
быстрее по времени, чем четырехногий.
Объект исследования: Шагающий механизм.
Предмет исследования: принципы работы шагающего механизма.
Я считаю, что изучение шагающего механизма расширит мой кругозор в области
механики, физики и технологии, а так же поможет выявить назначение и принцип работы
шагающего механизма.
4 1. Теоретическая часть
1.1. Шагающий робот
Шагающий робот – робот способный передвигаться с помощью ходьбы. Технику
ходьбы шагающего механизма можно разделить по количество точек опор на две, четыре
или шесть. Шагающий механизм – образован на преобразовании вращательного движения в
поступательное.
При создании шагающих роботов, передвигающихся на двух конечностях, инженеры
сталкиваются с двумя проблемами. Вопервых, необходимо добиться, чтобы во время
движения робот мог находится в устойчивом положении. Второе это сложные алгоритмы
движения, имитирующие движения человеческого тела даже при обыкновенной ходьбе.
Взаимосвязь между движениями отдельных частей двуногого робота, обеспечивающая ему
устойчивое движение не только по прямой линии, но и в пространстве.
Шестиногие шагающие роботы, повидимому, являются самой многочисленной из
всех когдалибо и гделибо разработанных категорий механизмов, способных
перемещаться с помощью искусственных ног. Популярность этих роботов в значительной
степени обусловлена тем, что проблемы обеспечения статической устойчивости
движущихся шестиногих аппаратов решаются относительно просто по сравнению с
другими конструкциями. Одной из проблем, которой уделяется существенное внимание
при проектировании мобильных шагающих аппаратов, является уменьшение необходимой
мощности источников питания и сокращение затрат энергии.
Обратив внимание на четвероногих животных, можно заметить, что при движении
они сохраняют равновесие за счет динамической устойчивости. Условием устойчивого
равновесия является требование, чтобы при движении центр тяжести такого робота в
любой момент находился в пределах воображаемого треугольника, углами которого
являются опорные в настоящий момент конечности. Вследствие этого был разработан
шагающий робот на четырех конечностях, алгоритм движения которого был определен
таким образом, чтобы при его движении в любой момент времени в воздухе находилась
только одна нога, а корпус имел опору одновременно на три точки и сохранял при этом
устойчивость.
5 1.2 Примеры шагающих механизмов
Современный уровень технологии и вычислительной техники позволяет строить не
только лабораторные макеты, но и крупномасштабные машины, которые могут служить
прототипами шагающих машин для выполнения конкретных действий на сложной
местности. Ниже рассмотрены некоторые существующие разработки шагающих машин.
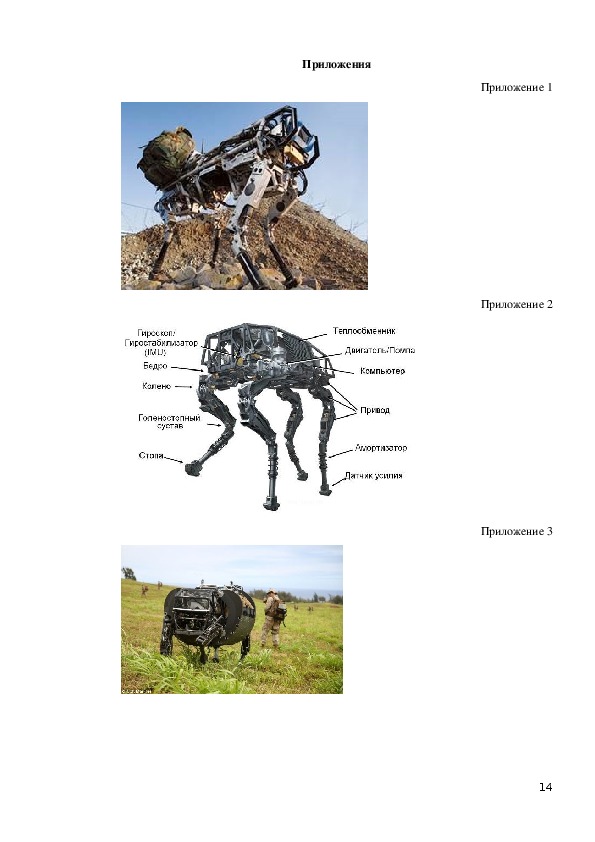
BigDog в переводе название робота «Большая собака». Но он совсем не является
механической копией собаки (Приложение 1).
Движения робота, конечно, напоминают движения животных, но аналогов в природе
не имеют. Его особенностью по сравнению с другими транспортными средствами является
то, что вместо привычных всем колес или гусениц он имеет четыре ноги, подобно
животным. Это позволяет перемещаться по местности, где не пройдет колесный или
гусеничный транспорт (Приложение 2).
С другими транспортными средствами его сближает двигатель внутреннего
сгорания. BigDog оснащён одноцилиндровым двухтактным двигателем Leopard gokart,
применяемым также в гоночных картах. Мощность двигателя 15 лошадиных сил. Вот
только двигатель, который приводит в действие электрический генератор и
гидравлическую систему робота издаёт достаточно сильный шум. Инженеры так и не
смогли решить проблему шума. В 2015 году отказались от дальнейшего развития подобных
роботов.
BigDog был больше опытным образцом,
а созданный на его
основе LS3 (Legged Squad SupportSystems) он же AlphaDog был уже передан для
испытания военным США (Приложение 3).
LS3 – военный мул, предназначен для работы в качестве вспомогательной машины,
которая осуществляет перевозку тяжелых грузов и раненных, транспортируя их с поля боя.
Робот передвигается не на колесном ходу, а на четырех ногах, что позволяет ему свободнее
проходить по сложному рельефу, не обходя препятствия, а перешагивая через них.
Первые испытания прошли на Гавайях. В ходе проверки AlphaDog смог пройти 30
километров с легкостью преодолевая все препятствия. При этом нес на себе груз весом 180
килограмм. Робот способен следовать за оператором и понимает голосовые команды, такие
как «следуй за мной», «стой», «сидеть», «стоять», «развернуться» и другие подобные
команды. AlphaDog оснащён многочисленными сенсорами, благодаря которым способен
обнаруживать препятствия и обходить их не сбиваясь с маршрута, обнаруживать заросли и
6 оценивать их проходимость, ведь он может передвигаться по кустарнику, высота которого
не превышает 1.5 метров. Может успешно передвигаться самостоятельно в условиях
нулевой видимости, используя для передвижения контрольные точки, заданные на GPS
маршруте. Уровень шума снижен до уровня шума, издаваемому пылесосом или легковым
автомобилем.
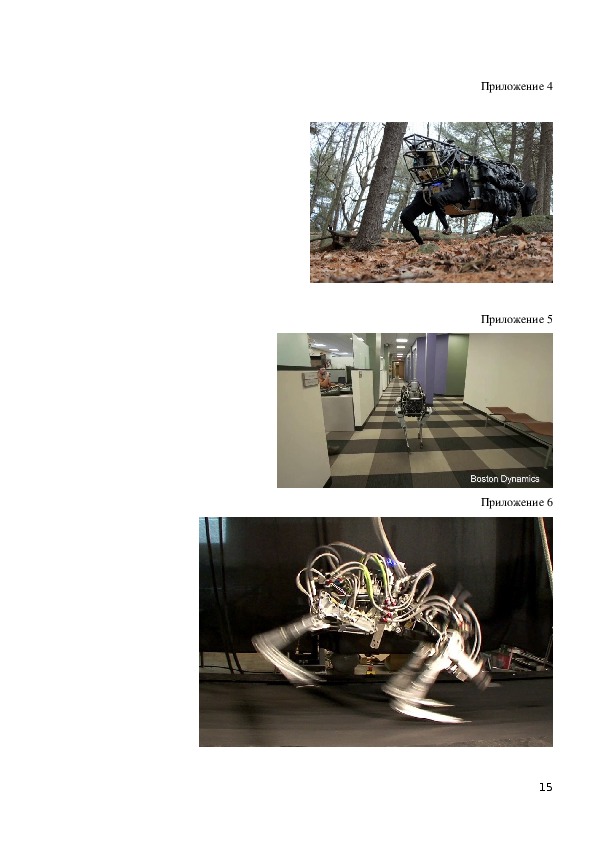
Робот показал превосходные результаты, продемонстрировав невероятную
манёвренность в условиях леса и города, отличную стабильность при передвижении по
овражной и пересечённой местности (Приложение 4).
Развитием «собачей серии» стал робот Spot. В отличие от предыдущих
четырехногих роботов, Spot оснащён электродвигателем и аккумулятором. Это снижает
уровень шума. Он имеет меньшие размеры и массу чем его предшественники.
Использоваться в качестве мула он уже не может, но для поисковых и спасательных
операций робот прекрасно подходит (Приложение 5).
Он способен передвигаться по местности. Малые размеры и электрический
двигатель позволяет ему, не причиняя неудобства окружающим, передвигаться внутри
зданий. Меньший вес даёт возможность с лёгкостью подниматься и спускаться по
лестнице.
Робот Cheetah. робот, название которого переводится как гепард, является
чемпионом среди роботов по скорости (Приложение 6).
На испытаниях роботгепард развил скорость до 45,5 км/ч. Но обладая такой
скоростью, далеко убежать он не может. Так как бегать он может только на беговой
дорожке. Cheetah не имеет своей гидравлической системы и поэтому находится на
«привязи». Также как и гепард, робот развивает скорость за счет сгибания и разгибания
«спины», что обеспечивает увеличение силы толчка конечностями. Особенностью всего
кошачьего семейства роботов является необычайно гибкая спина. Она изгибается вперёд и
назад при каждом шаге, как у животных. Это существенно увеличивает скорость.
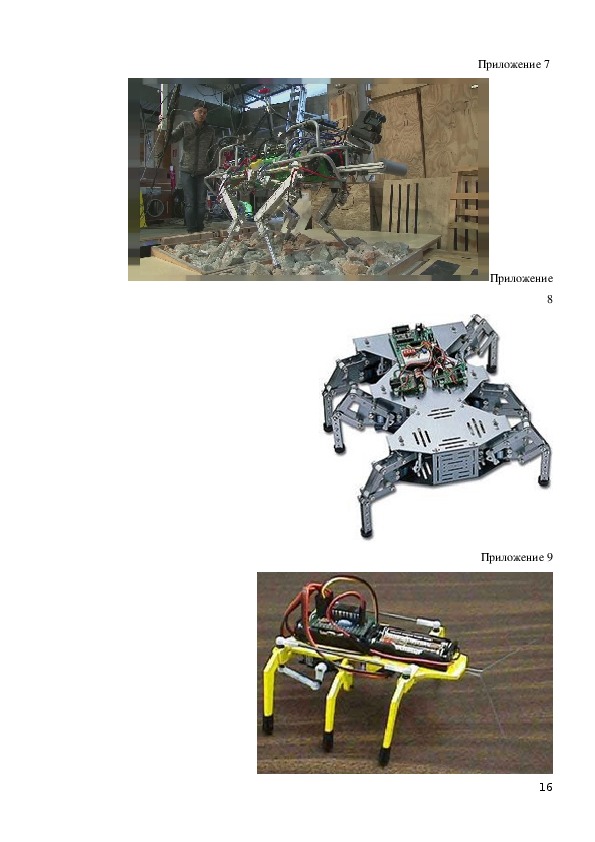
В настоящее время в национальном НИИ технологий, расположенном в Генуе,
исследователи работают над созданием новейших роботов, которых можно будет
использовать в местах, где произошли мощные сейсмические толчки (землетрясения)
(Приложение 7).
Этот робота назвали HyQ (ХиК). Он даст новые возможности для доставки
различных грузов и оборудования в пострадавшие районы. Для него преград не существует:
он может подниматься по лестницам и тому, что от них осталось, карабкаться на
7 возвышенности, передвигаться при необходимости задним ходом и сохранять вертикальное
положение.
По словам сотрудника проекта, “робот не сможет полностью заменить сотрудников
экстренных служб и спасателей, но он сможет взять на себя часть их обязанностей и
функций, освободив, таким образом, время для первоочередной миссии: поиску
пострадавших и оказанию им помощи. Он оснащён всем необходимым – от лазерных
сенсоров, видеокамер до датчиков метана. Это устройство может быть использовано в
самых разных качествах и в самых разных ситуациях, даже если продолжаются
сейсмические толчки, он удержит равновесие и сохранить способность передвигаться.
После прочности и устойчивости, третий важнейший фактор этого робота – мощность
аккумуляторов, которые дадут возможность работать более длительное время”.
Чтобы внедрить его в производство и использовать в спасательных операциях,
потребуются еще годы работы.
Особенности конструкции робота HexCrawler, позволяют ему передвигаться по
неровной поверхности. Корпус робота выполнен из алюминия. Привод осуществляется
с помощью 12 сервомоторов, позволяющих ему развивать большую скорость. Имеет 3
группы конечностей. Каждая группа состоит из 2х конечностей. Одна группа выполняет
только опорную функцию. Две остальные используют для обеспечения движения. Каждая
из этих групп приводится в движения одним сервоприводом. Кинематика робота сильно
упрощена, так же как и система управления, обеспечения движения. Вследствие чего
снижена маневренность, требования к качеству поверхности, наоборот, повышены
(Приложение 8).
Mini Hexapod — автономный робот двигается прямолинейно, до тех пор, пока не
сталкивается с какимлибо препятствием. Он оборудован двумя датчиками — “усами”.
Если один из усов соприкасается с препятствием, робот поворачивается (Приложение 9).
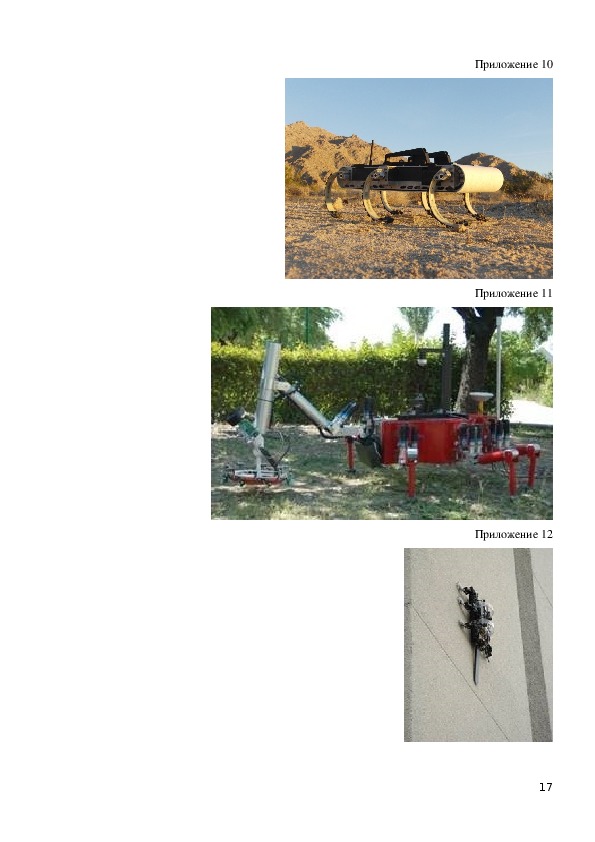
У робота XRHex есть ощутимые преимущества в проходимости (Приложение 10).
Шесть «лап» робота синхронно вращаются «по три», примерно копируя методику
перемещения прочих хексоподов. Только сами ноги представляют собой полукруглые
упругие пластины с резиновым покрытием. Такая конструкция позволяет роботу довольно
успешно двигаться и по траве, песку, щебенке, грязи и многим другим типам поверхности,
которые могут затруднять движение как колесных, так и шагающих роботов. При этом
конструкция способна преодолевать достаточно заметные относительно собственных
размеров препятствия.
8 Для обеспечения большей безопасности при проведении поиска мин был разработан
робот SIL06, имеющий шесть конечностей для передвижения (Приложение 11).
Двигательная система нового робота действует таким образом, что всегда три
конечности находятся в устойчивом контакте с поверхностью, обеспечивая, таким
образом, достаточную устойчивость всей конструкции в целом. Благодаря этой
устойчивости и большому количеству конечностей, этот робот обладает хорошей
маневренностью, скоростью передвижения и точностью движений, что является
необходимым при проведении такого опасного мероприятия как разминирование
местности.
RiSE — это робот, который способен подниматься по вертикальным поверхностям,
таким как стены, деревья и заборы (Приложение 12).
Робот использует микро когти на конечностях, чтобы подниматься по
текстурированным поверхностям. Подстраивает подвижный позвоночник, чтобы
соответствовать кривизне поверхности и использует хвост как дополнительную опору на
крутых подъемах. Размер робота 0.25 м, вес около 2 кг, скорость передвижения 0,3 м / с.
Каждый из шести ног приводятся в движение парой электродвигателей. Бортовой
компьютер управляет движением ног, опрашивает и анализирует данные с различных
датчиков, в том числе датчиков положения, тензодатчиков и контактных датчиков.
В целом идея использования шагающих роботов рассматривается многими
исследователями. Выбор конструкций зависит от задач, поставленных перед шагающей
машиной. Возможность применения упрощенной конструкции, сокращения подвижности
конечностей, упрощения систем управления, обеспечения движения возникает в случаях,
когда к роботу не предъявлены требования перемещения по сложным поверхностям,
в случаях, когда часть управления берет на себя оператор. В более жестких условиях, при
необходимости действовать полностью или частично автономно и при заранее неизвестном
состоянии опорной поверхностью, робот должен иметь конструкцию с большей степенью
подвижности конечностей. Это приводит к необходимости построения сложной системы
управления.
Конкретный уровень автоматизации управления движением шагающей машины
зависит, от назначения машины и условий ее применения. Так информационные роботы,
работающие в экстремальных условиях, при заранее неизвестном рельефом местности
должны использовать сложные бортовые вычислительные комплексы,
технологических шагающих машин применение таких систем не целесообразно.
а для
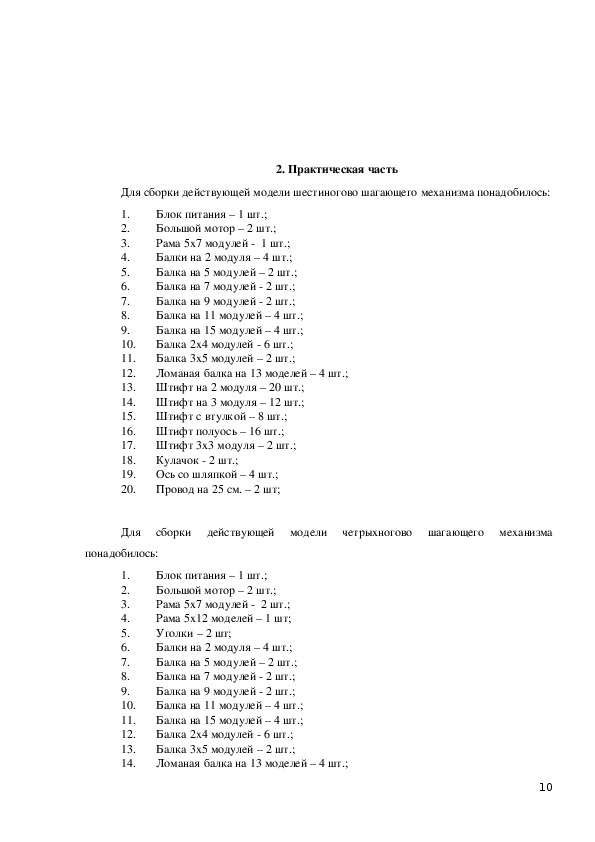
9 2. Практическая часть
Блок питания – 1 шт.;
Большой мотор – 2 шт.;
Рама 5х7 модулей 1 шт.;
Балки на 2 модуля – 4 шт.;
Балка на 5 модулей – 2 шт.;
Балка на 7 модулей 2 шт.;
Балка на 9 модулей 2 шт.;
Балка на 11 модулей – 4 шт.;
Балка на 15 модулей – 4 шт.;
Балка 2х4 модулей 6 шт.;
Балка 3х5 модулей – 2 шт.;
Ломаная балка на 13 моделей – 4 шт.;
Для сборки действующей модели шестиногово шагающего механизма понадобилось:
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13. Штифт на 2 модуля – 20 шт.;
14. Штифт на 3 модуля – 12 шт.;
15. Штифт с втулкой – 8 шт.;
16. Штифт полуось – 16 шт.;
17. Штифт 3х3 модуля – 2 шт.;
18.
19.
20.
Кулачок 2 шт.;
Ось со шляпкой – 4 шт.;
Провод на 25 см. – 2 шт;
Для сборки действующей модели четрыхногово шагающего механизма
понадобилось:
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
Блок питания – 1 шт.;
Большой мотор – 2 шт.;
Рама 5х7 модулей 2 шт.;
Рама 5х12 моделей – 1 шт;
Уголки – 2 шт;
Балки на 2 модуля – 4 шт.;
Балка на 5 модулей – 2 шт.;
Балка на 7 модулей 2 шт.;
Балка на 9 модулей 2 шт.;
Балка на 11 модулей – 4 шт.;
Балка на 15 модулей – 4 шт.;
Балка 2х4 модулей 6 шт.;
Балка 3х5 модулей – 2 шт.;
Ломаная балка на 13 моделей – 4 шт.;
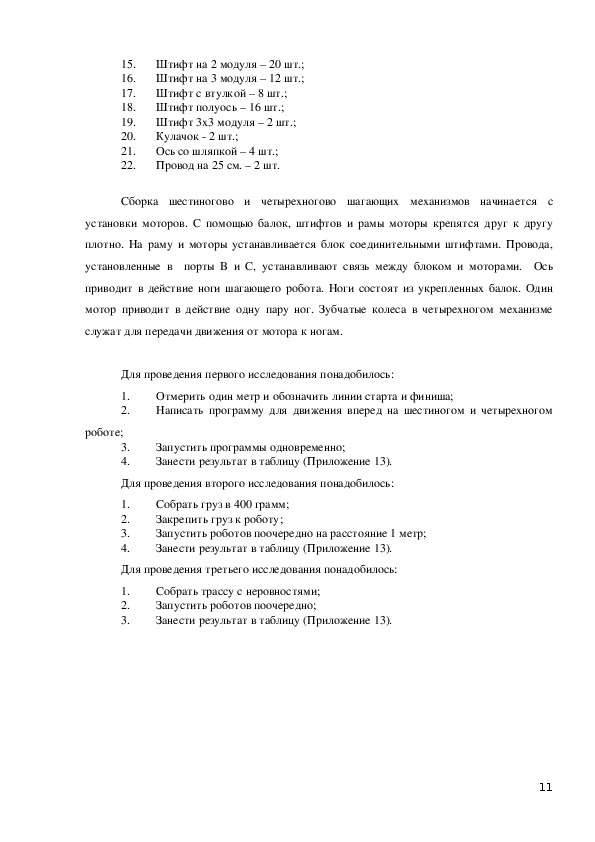
10 15. Штифт на 2 модуля – 20 шт.;
16. Штифт на 3 модуля – 12 шт.;
17. Штифт с втулкой – 8 шт.;
18. Штифт полуось – 16 шт.;
19. Штифт 3х3 модуля – 2 шт.;
20.
21.
22.
Кулачок 2 шт.;
Ось со шляпкой – 4 шт.;
Провод на 25 см. – 2 шт.
Сборка шестиногово и четырехногово шагающих механизмов начинается с
установки моторов. С помощью балок, штифтов и рамы моторы крепятся друг к другу
плотно. На раму и моторы устанавливается блок соединительными штифтами. Провода,
установленные в порты В и С, устанавливают связь между блоком и моторами. Ось
приводит в действие ноги шагающего робота. Ноги состоят из укрепленных балок. Один
мотор приводит в действие одну пару ног. Зубчатые колеса в четырехногом механизме
служат для передачи движения от мотора к ногам.
Отмерить один метр и обозначить линии старта и финиша;
Написать программу для движения вперед на шестиногом и четырехногом
Для проведения первого исследования понадобилось:
1.
2.
роботе;
3.
4.
Запустить программы одновременно;
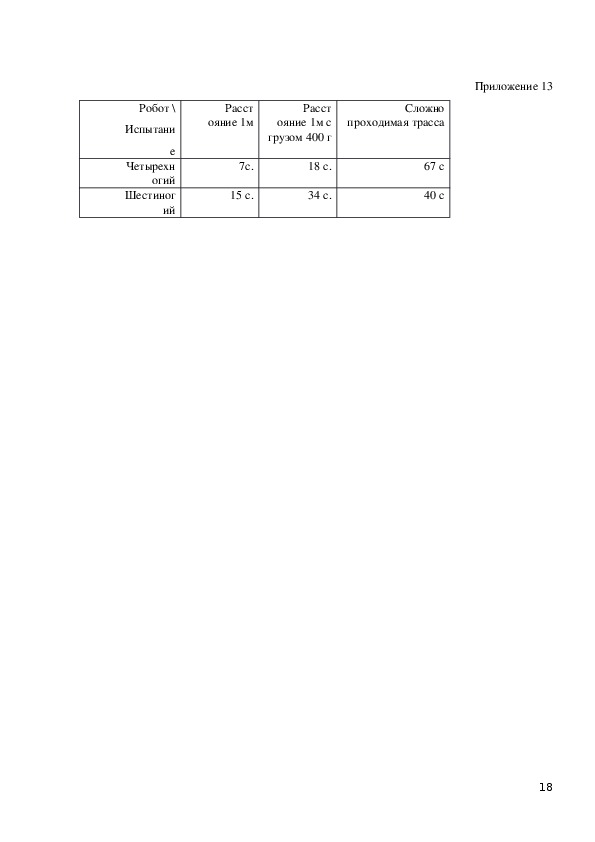
Занести результат в таблицу (Приложение 13).
Для проведения второго исследования понадобилось:
Собрать груз в 400 грамм;
1.
Закрепить груз к роботу;
2.
Запустить роботов поочередно на расстояние 1 метр;
3.
4.
Занести результат в таблицу (Приложение 13).
Для проведения третьего исследования понадобилось:
1.
2.
3.
Собрать трассу с неровностями;
Запустить роботов поочередно;
Занести результат в таблицу (Приложение 13).
11 Заключение
В результате проделанной работы, можно сделать вывод о том, что задача создания
четырехногого и шестиногого шагающих механизмов успешно создается на основе
комплекта LEGO Education «Mindstorms EV3».
Выдвинутая мною гипотеза была не доказана, путем экспериментов. Скорость
четырехногого робота превышает скорость шестиногого, но вот в проходимости более
сложной трассы, четырехногий уступает шестиногому.
Работая над данным проектом, я познакомился с новым для меня разделом
механики – шагающий механизм. Узнал, как работает шагающий механизм, какие
существует сборки шагающего механизма и как один мотор приводит в действие две пары
лап. Я изучил составляющие шагающего механизма, и смог самостоятельно собрать две
действующие модели. Полученные знания мне пригодятся как для уроков технологии и
физики, так и для дальнейшей жизни, потому я планирую стать инженером, и продолжать
работу над шагающим механизмом.
На дальнейшее изучение я ставлю гипотезу: что шагающий механизм с шестью
точками опоры будет иметь большую проходимость на червяной передаче.
12 1.
«Lego Mindstorms»: книга дл учителя 200508RM. – Институт новых
Список литературы:
технологий. – 225 с.
2.
3.
4.
robotyi/
http://www.tcheb.ru/
https://ru.wikipedia.org/wiki/
http://gagadget.com/science/21196istoriyabostondynamicskompaniyalyudi
13 Приложения
Приложение 1
Приложение 2
Приложение 3
14 Приложение 4
Приложение 5
Приложение 6
15 Приложение 7
Приложение
8
Приложение 9
16 Приложение 10
Приложение 11
Приложение 12
17 Приложение 13
Робот \
Испытани
е
Четырехн
огий
Шестиног
ий
Расст
ояние 1м
Расст
ояние 1м с
грузом 400 г
Сложно
проходимая трасса
7с.
15 с.
18 с.
34 с.
67 с
40 с
18
Шагающий механизм

Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Шагающий механизм
Материалы на данной страницы взяты из открытых истончиков либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.
19.02.2019
Посмотрите также:
© ООО «Знанио»
С вами с 2009 года.
![]()
О портале