Қозғалтқыштың құрылғысын ашпастан бұрын, қысқаша түрде бір роботты техникалық түсінік - актуаторды сипаттаймыз. Шындығында, актуатор - роботқа қозғалуға мүмкіндік беретін құрылғы. Егер робот дөңгелекті болса, онда актуаторда ол екеу - әр дөңгелегінде бір-біреуден. Күрделі қадымдап басатын роботтың құрамында өз аяғының әр буынында бірнешеу көптеген осындай құрылғылар бар.
Актуаторлардың көптеген түрлі түрлері бар, оларға үш негізгі топ қосылады: электрлік, пневматикалық және гидравликалық (соңғысын кез-келген экскаватордан байқауға болады). Ең қолжетімділерге және қарапайымдарға электрлік жатады. Осындай электрлік актуаторлардың бірін біз өзіміздің курстарымызда пайдаланатын боламыз. Оның атауы - тұрақты токтың қозғалтқышы.
«Роботты техника». 5ші деңгей. 10 сабақ.
Сабақтың тақырыбы: Қозғалтқыштарды басқару.
Сабақтың ұзақтығы: 2 сағ.
Қозғалтқыштарды басқару
1. Тұрақты токтың қозғалтқышы
1.1 Қозғалтқыштың құрылғысы
Қозғалтқыштың құрылғысын ашпастан бұрын, қысқаша түрде бір роботты техникалық түсінік
актуаторды сипаттаймыз. Шындығында, актуатор роботқа қозғалуға мүмкіндік беретін құрылғы. Егер
робот дөңгелекті болса, онда актуаторда ол екеу әр дөңгелегінде бірбіреуден. Күрделі қадымдап
басатын роботтың құрамында өз аяғының әр буынында бірнешеу көптеген осындай құрылғылар бар.
Актуаторлардың көптеген түрлі түрлері бар, оларға үш негізгі топ қосылады: электрлік,
пневматикалық және гидравликалық (соңғысын кезкелген экскаватордан байқауға болады). Ең
қолжетімділерге және қарапайымдарға электрлік жатады. Осындай электрлік актуаторлардың бірін біз
өзіміздің курстарымызда пайдаланатын боламыз. Оның атауы тұрақты токтың қозғалтқышы.
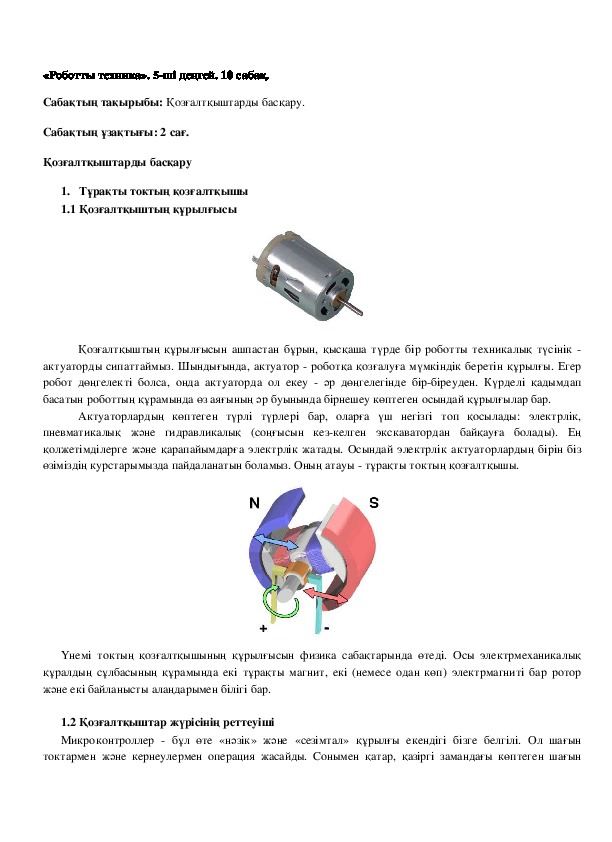
Үнемі токтың қозғалтқышының құрылғысын физика сабақтарында өтеді. Осы электрмеханикалық
құралдың сұлбасының құрамында екі тұрақты магнит, екі (немесе одан көп) электрмагниті бар ротор
және екі байланысты алаңдарымен білігі бар.
1.2 Қозғалтқыштар жүрісінің реттеуіші
Микроконтроллер бұл өте «нәзік» және «сезімтал» құрылғы екендігі бізге белгілі. Ол шағын
токтармен және кернеулермен операция жасайды. Сонымен қатар, қазіргі замандағы көптеген шағынконтроллерлер және ЭЕМ 5 вольтті, 3.3 Вольтті немесе одан да аз кернеумен жұмыс істейді. Сонымен
қатар, типтік шағын сұлбаларды айналатын токтың күші 1020 миллиамперден аспайды.
Егер бізге шағын контроллерінің көмегімен роботтың қуатты қозғалтқыштарын басқару қажет болса
не істеу қажет? Тіпті біздің курстағы аз қозғалтқыштарға 56 вольтті кернеу мен жүздеген миллиамперге
дейінгі токтың күші қажет етіледі. сондайақ, қозғалтқышты іске қосқан уақытта ол арқылы күші бір
амперден артық болатын ток өтеді. Мұндай жүктеме секундт үлесінің ішінде кезкелген шағын
контроллеріні жояды.
Осы проблеманы шешу үшін арнайы құрылғылар қолданылады, олар қозғалтқыш жүрісінің
реттеушілері деп аталады. Мұндай құрылғылар қуатты қозғалтқышқа әлсіз шағын контроллерінің мұқият
басқаруымен үлкен токтарды беруіне мүмкіндік береді. Біздің жұмыста біз екі арналы DRV8833
реттеуішін пайдаланатын боламыз, олардың қорытындылары төменде көрсетілген.
GND жер;
VIN қозғалтқыштардың қуатының кернеуі 2.710.8В;
AIN1, AIN2 № 1 арнаны басқару (контроллерге);
BIN1, BIN2 № 2 арнаны басқару (контроллерге);
AOUT1, AOUT2 № 1 арнаның шығуы (қозғалтқышқа);
BOUT1, BOUT2 № 2 арнаның шығуы (қозғалтқышқа);
AISEN, BISEN токтты шектеушінің баптауы (қоспаймыз);
nSLEEP тыныштық режиміне ауыстырыпқосу (белсенділігі төмен, қоспаймыз);
nFAULT қатенің дабылы (қоспаймыз).
Әр арнаны басқару үшін екі шығарылым қозғалтқышты айналудың бағытын беру үшін қажет. Мысалы,
егер AOUT1 қорытындысына жағымды дабылды беретін болсақ, ал AOUT2 нөлді берсек (яғни, жермен
біріктіру), онда қозғалтқыш бір бағытта айналатын болады. Мысалы, AOUT2 жағымды дабылын бере
отырып, нөлді AOUT1 берсек, біз қозғалтқыштың айналуының бағытын өзгертеміз.
1.3 Айналу жылдамдығын басқару үшін ЕИМді пайдалану
Өткен сабақтарда айтылғандай, құралдардың кернеуін баяу басқару үшін біз ЕИМ күрделі дабылдарын
пайдалана аламыз. Қозғалтқыштардың айналуының жылдамдығын басқару үшін, баяу басу мен жарық
диодын жандыру үшін біз қолданған сол тәсілді қолдануға болады.
ТапсырмаларТапсырма 1. Қозғалтқыштың айналуының бағытын басқару
Жұмыстың нәтижесі
Бағдарламаны іске қосқаннан кейін, қозғалтқыш бір жаққа, сосын екінші жаққа ауыса отырып айналуы
тиіс. Бағыттың ауысуының кезеңі бес секунд.
Қолданылатын компоненттер:
Қозғалтқыштар
жүрісінің реттеуіші –
1 дана
Қозғалтқыш – 1 дана
Мысал:
int motA_1 = 3;
int motA_2 = 5;
void setup(){
pinMode(motA_1, OUTPUT);
pinMode(motA_2, OUTPUT);
}
void loop(){
analogWrite( motA_1, 0 );
analogWrite( motA_2, 128 );
delay(2500);
analogWrite( motA_2, 0 );
analogWrite( motA_1, 128 );
delay(2500);
}
Тапсырма 2. Қозғалтқыштың айналуының жылдамдығын басқару.
Жұмыстың нәтижесі
Бағдарламаны іске қосқаннан кейін, қозғалтқыш әр екі секунд сайын баяу айналуының жылдамдығын
арттырады.
Тапсырма 3. Қозғалтқыш пен потенциометр (өздігінен)Жұмыстың нәтижесі
Іске қосқаннан кейін бағдарлама күту режиміне өтеді. потенциометрдің сабын айналдырған кезде,
қозғалтқыш айналудың жылдамдығын толық тоқтағаннан бастап максимумға дейін өзгертуі тиіс.
Тапсырма 4. Қозғалтқыш және температураның қадағасы (өздігінен)
Жұмыстың нәтижесі
Іске қосқаннан кейін бағдарлама күту режиміне өтеді. Егер ауаның қоршаған ортаның температурасы 35
градусқа дейін артса, қозғалтқыш желдеткішті айналдыра бастайды.2. Одометрия
2.1 Одометрдің әрекет етуінің қағидаты
Одометрия дегеніміз кеңістікте осы машинаның орын ауыстыруын бағалау үшін машинаның
жетектерінің қозғалыстары туралы мәліметтерді пайдалануы. Одометрияны жиі жайғастыру деп атайды.
Роботтың қоршаған ортада бағыт ала алуы, кеңістіктегі өзінің жайкүйін білуі үшін оған ол үшін түрлі
құралдардың бірқатары қажет. Жайғастырудың бірқұрылғысы одометр болып табылады.
Одометр бұл дөңгелектің айналымдарының есептегіші. Осы құралдың әрекет етуінің қағидаты өте
қарапайым. Дөңгелектің бір (немесе бірнеше) нүктелеріне белгі белгіленеді. Осы белгі дөңгелектің негізгі
бөлігінен ерекшеленетін түске боялған дөңгелектің немесе телімнің дискісіндегі тесік, тұрақты магнит
болуы мүмкін. Белгінің түріне байланысты, машинаның өзінде тіркеуші құрылғы орнатылады. Магниттің
жағдайында, мұндай құрылғы Холлдың қадағасы немесе шарғы бола алады. Ал егер бізге тесікті ұстау
керек болса, фото бөлгіш жарамды болып табылады.
Белгі тіркеушінің жанынан өткен сайын, біз өзіміздің есептегішке бірлікті қосып отырамыз. Сондай
ақ, біз тіркеудің жағдайларының арасындағы уақытты өлшейтін боламыз, ол дөңгелектің айналуының
жылдамдығын өлшеуге көмектесетін болады.
2.2 Спидометрдің әрекет етуінің қағидаты
Спидометр бұл жылдамдықты өлшеуге арналған құрал. Кезкелген заманға сай көлік құралында
спидометр бар. Ол қалай құрылған?
Алғашында бізге одометр қажет болады. Айтып өткендей, одометр бізге дөңгелектің айналымының
санын тіркеуге мүмкіндік береді. Сонымен қатар, біз әр айналым жүзеге асырылатын уақытты өлшеу үшін
алдынала қам жасадық.
Осы екі параметрлерді біле отырып, біз дөңгелектің орташа жылдамдығын жеңіл аламыз:
V к = Q/TCP
мұнда Q айналымның саны;
Тср әр айналымның орташа уақыты;
Vk айналымның орташа жылдамдығы;
Дөңгелектің айналуының жылдамдығын біле отырып, біз машиналардың жүруінің жылдамдығын
есептей аламыз. Ол үшін біз дөңгелектің шеңберінің ұзындығын өзімізге белгілі формула бойынша
өлшейміз:
Lk = 2nr
мұнда r дөңгелектің радиусы, ал L оның шеңберінің ұзындығы.
Сондайақ, қорытындылайтын кезең. Дөңгелектің айналуының жылдамдығын оның шеңберінің
ұзындығына көбейтеміз:
S = V к * L к
Мұнда S машинаның жүруінің бастапқы жылдамдығы.2.3. Холлдың қадағасы
Енді дөңгелектегі магниттік белгі туралы сөйлесейік. Айтып өткендей, осындай белгіні тіркеу үшін
магнитті өрістің қадағасы қажет. Осындай қадаға ретінде шарғыны да және герконды да (бітеу байланыс),
және басқа да қызықты құралдарды қолдануға болады. Осы курста біз Холлдың қадағасын TLE4935L
пайдаланатын боламыз.
Холлдың қадағасы бұл дайын электрондық құрал, ол қосымша аралық тізбектерсіз шағын
контроллерге қосылуға дайын. Күші жеткілікті магнитті өрісті анықтаған кезде, Холлдың қадағасы
дабылды байланыста кернеудің жағымды деңгейін береді.
Тапсырмалар
Тапсырма 1. Холлдың қадағасы
Жұмыстың нәтижесі
Іске қосқаннан кейін бағдарлама күту режиміне өтеді. Магнитті өрісті қадағамен тіркеген кезде ДК ретті
портына “Field detected” жолы жіберіледі.
Тапсырма 2. Қозғалтқыштың айналымдарының есептегіші
Жұмыстың нәтижесі
Іске қосқаннан кейін бағдарлама күту режиміне өтеді. Әр жаңа айналымды тіркеген кезде жасалған
айналымдардың жалпы саны ДК ретті портына жіберіледі.
Тапсырма 3. Сегментті көрсеткішке есептегіштің шығуы (өздігінен)
Жұмыстың нәтижесі
Іске қосқаннан кейін бағдарлама күту режиміне өтеді. Әр жаңа айналымды тіркеген кезде, жасалған
айналымдардың жалпы саны СК дисплейде көрінеді.
Тапсырма 4. СК дисплейге спидометрдің шығуы (өздігінен)
Жұмыстың нәтижесі
Іске қосқаннан кейін, бағдарлама СК дисплейде дөңгелектің айналуының ағымдағы жылдамдығын көрсете
бастайды.2.4. Сервоқозғалтқыш
2.4.1. Сервоқозғалтқыштың құрылғысы
Роботтехникасында қолданылатын тағы бір электрмеханикалық актуатор сервоқозғалтқыш (серво
жетек, сервомашина) болып табылады.
Қарапайым қозғалтқыштарға қарағанда, сервоқозғалтқыш білікті қатаң түрде берілген бұрышқа
қарай бұра алады. Сервомашиналардың осы пайдалы қасиеті жиі авиаүлгілеуде, электрондарды, рөлдерді,
биіктіктерді және т.с.с. басқару үшін қолданылады.
Осындай қозғалтқыш күрделі құрастырылған. Құралдың жоғарғы бөлігінде тістегершікті
бәсеңдеткіш орналасқан, ол қозғалтқыштың айналатын кезеңін біршама ұлғайтуға мүмкіндік береді, ол
оның айналу жылдамдығының төмендеуінің есебінен жүзеге асады.
Төменде потенциометр орналасқан, ол бәсеңдеткіштің қандай бұрышқа бұрылғандығын анықтауға
мүмкіндік береді. Соңында, корпустың ішінде басқарудың шағын тақтасы бар, ол сервоқозғалтқышты
осындай ақылды етеді. Осы тақта үнемі біліктің ағымдағы қалпын бақылап отырады, және егер білік
берілген бағыттан ауытқитын болса, оны түзетеді.
Сервоқозғалтқыш ЕИМ дабылының көмегімен басқарылады. Бірақ тұрақты токтың қарапайым
қозғалтқышына қарағанда, мұнда ЕИМ деңгейін айналудың жылдамдығы емес, айналудың бұрышы береді.
2.4.2 Сервоқозғалтқыштарды басқарудың кітапханасы
Arduino IDE сервоқозғалтқыштармен жұмыс істеуге арналған арнайы кітапхана бар Servo.
Қозғалтқышты қосу үшін тиісті нысанды құру қажет.
Servo myservo;
Сосын, setup бөлімінде жүктеуді орындау қажет:
myservo.attach (байланыстың_нөмірі);
Біліктің бұрышқа бұрылуы write қызметімен жүзеге асырылады:
myservo.write (бұрыш);
бұрыш градуспен беріледі және 90 бастап +90 дейін, сервоқозғалтқыштың үлгісіне байланысты
мәнге ие болады.
#include Бағдарламаның мысалы
Servo myservo;
int servo_pin = 9;
void setup() {
myservo.attach( servo_pin );
myservo.write( 90 );
}
void loop(){
}
//сервоқозғалтқышты Arduino 9 байланысымен байланыстырамыз
// қозғалтқыштың білігін +90 градусқа бұрамыз
Тапсырмалар
Тапсырма 1. Сервоқозғалтқышты басқару
Жұмыстың нәтижесі
Бағдарламаны іске қосқаннан кейін, қозғалтқыш білікті солға қарай 90 градусқа, сосын екі секундтан кейін
оңға қарай 90 градусқа бұрады.
Тапсырма 2. Сервоқозғалтқыш пен потенциометр (өздігінен)
Жұмыстың нәтижесі
Іске қосқаннан кейін бағдарлама күту режиміне өтеді. Потенциометрдің тұтқасы айналған кезде, серво
қозғалтқыш бұрылыстың бұрышын 90 бастап +90 градусқа дейін ауыстырады.
Тапсырма 3. Нұсқары бар спидометр (өздігінен)
Жұмыстың нәтижесі
Іске қосқаннан кейін бағдарлама сервоқозғалтқышта бұрышты 0 градусқа орнатады. Орнатылған
спидометрмен дөңгелекті айналдырған кезде жылдамдықтың көлемі туралы ақпарат сервоқозғалтқыштың
білігі бұрылысының бұрышына айналады.