Поделиться

Направленность программы – техническая.
Уровень освоения программы – базовый.
Дополнительная общеобразовательная общеразвивающая программа «В мире роботов» разработана согласно требованиям следующих нормативных документов:
− Федеральный Закон «Об образовании в Российской Федерации» от 29.12.2012 № 273-ФЗ;
− Порядок организации и осуществления образовательной деятельности по дополнительным общеобразовательным программам (утвержден приказом Минпросвещения России от 09.11.2018 № 196);
− Концепция развития дополнительного образования детей (утверждена распоряжением Правительства РФ от 04.09.2014 № 1726-р);
− Санитарными правилами СП 2.4.3648-20 от 28.09. 2020 г. № 28 "Санитарно-эпидемиологические требования к организациям воспитания и обучения, отдыха и оздоровления детей и молодежи";
− Стратегия развития воспитания в Российской Федерации на период до 2025 года (утверждена Распоряжением Правительства
Российской Федерации от 29 мая 2015 г. N 996-р)
− Уставом учреждения.
Актуальность программы.
Дополнительная общеобразовательная общеразвивающая программа «В мире роботов» (далее – Программа) имеет техническую направленность и предназначена для обучения основам информатики, а также знакомства с робототехникой, управлением и моделированием.
Сегодня без робототехники трудно представить какую-либо сферу человеческой деятельности. Роботы прочно вошли в нашу жизнь. Интенсивное использование роботов на производстве и в быту требует, чтобы пользователи обладали современными знаниями в области управления роботами. Это позволит развивать новые, умные, безопасные и более продвинутые автоматизированные системы.
Данная программа разработана на основании программы «В мире роботов» (разработчик А.О. Волков, педагог дополнительного образования ГБОУ Школа № 2053).
Обучение по Программе дает возможность школьникам закрепить и применить на практике полученные знания по дисциплинам: математике, физике, информатике, технологии. За счет использования специальных терминов и технических понятий расширяются коммуникативные функции, углубляются возможности лингвистического развития обучающегося.
Педагогическая целесообразность.
Для реализации Программы используются образовательные конструкторы фирмы LEGO на платформе LEGO MINDSTORMS Education EV3. Они представляют собой набор конструктивных деталей, позволяющих собрать многочисленные варианты механизмов; набор датчиков; двигатели и микрокомпьютер EV3, который управляет всей построенной конструкцией.
Использование конструктора LEGO EV3 позволяет создать уникальную образовательную среду, которая способствует развитию инженерного, конструкторского мышления. В процессе работы с LEGO EV3 обучающиеся приобретают опыт решения как типовых, так и нешаблонных задач по конструированию, программированию, сбору данных. Кроме того, работа в команде способствует развитию коммуникативных навыков.
Конструктор LEGO EV3 обеспечивает простоту при сборке начальных моделей, что позволяет ученикам получить быстрый результат. При этом есть возможность изменять модели и программы. Такой подход позволяет учащимся усложнять модель и программу, проявлять самостоятельность в изучении темы. Программное обеспечение LEGO MINDSTORMS Education EV3 обладает очень широкими возможностями, в частности, позволяет вести рабочую тетрадь и представлять свои проекты прямо в среде программного обеспечения LEGO EV3.
Цель и задачи Программы
Цель
Развитие мотивации личности ребенка к познанию и техническому творчеству через формирование практических умений и навыков в области робототехники.
Задачи Обучающие:
- дать первоначальные знания по устройству робототехнических устройств;
- научить основным приемам сборки и программирования робототехнических средств;
- ознакомить с правилами безопасной работы с инструментами, необходимыми при конструировании робототехнических средств.
Развивающие:
- выявить и развить способности детей, помогающие достичь успеха в техническом творчестве;
- развить творческую инициативу и самостоятельность; - развить творческие способности и логическое мышление.
Воспитательные:
- сформировать творческое отношение к выполняемой работе; - сформировать умение работать в коллективе; - научить доводить дело до конца.
Адресат программы – дети в возрасте 11–15 лет, 1 год обучения.
Срок освоения программы – 9 месяцев/1 учебный год.
Объем программы 76 часов.
Условия реализации программы.
Условия набора в коллектив: принимаются все желающие, при наличии справки, разрешающей занятия по данному направлению деятельности.
Наполняемость учебной группы – 8–12 человек.
Формы организации обучения:
- групповые – для всей группы, при изучении общих и теоретических вопросов;
- индивидуально-групповые на практических занятиях.
На занятиях применяется дифференцированный, индивидуальный подход к каждому обучающемуся.
Режим занятий: занятия проводятся 1 раз в неделю по 2 часа.
Ожидаемые результаты
В результате освоения Программы обучающиеся
будут знать:
- основные понятия робототехники, основные технические термины, связанные с процессами конструирования и программирования роботов;
- общее устройство и принципы действия роботов;
- общую методику расчета основных кинематических схем;
- основные принципы компьютерного управления, назначение и принципы работы цветового, ультразвукового датчика, датчика касания, различных исполнительных устройств;
- правила техники безопасности при работе в кабинете, оснащенном электрооборудованием.
будут понимать:
- порядок обнаружения неисправностей в различных роботизированных системах;
- методику проверки работоспособности отдельных узлов и деталей;
- основные способы передачи механического воздействия, различные виды шасси, виды и назначение механических захватов.
будут уметь:
- собирать простейшие модели с использованием EV3;
- самостоятельно проектировать и собирать из готовых деталей манипуляторы и роботов различного назначения;
- использовать для программирования микрокомпьютер EV3
(программировать на дисплее EV3);
- владеть основными навыками работы в визуальной среде программирования, программировать собранные конструкции под задачи начального уровня сложности;
- разрабатывать и записывать в визуальной среде программирования типовые команды управления роботом;
- подбирать необходимые датчики и исполнительные устройства, собирать простейшие устройства с одним или несколькими датчиками, собирать и отлаживать конструкции базовых роботов;
- правильно выбирать вид передачи механического воздействия для различных технических ситуаций, собирать действующие модели роботов, а также их основные узлы и системы начального уровня сложности.
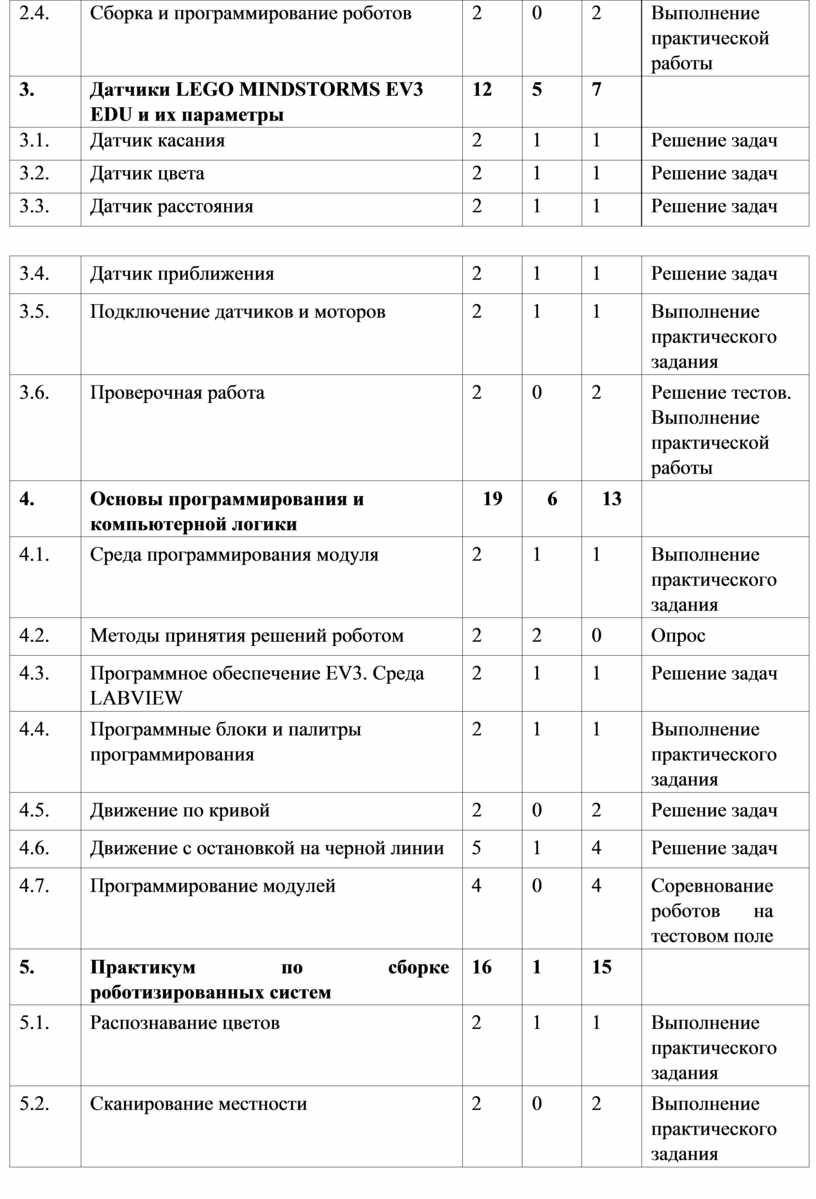
II. Учебно-тематический план программы
|
№ п/п |
Название разделов, тем |
Количество часов |
Формы аттестации/ контроля |
||
|
|
|
|
|||
|
1. |
Введение в робототехнику |
4 |
4 |
0 |
|
|
1.1. |
Виды роботов |
2 |
2 |
0 |
Собеседование |
|
1.2. |
Правила обращения с роботами |
2 |
2 |
0 |
Опрос |
|
2. |
Знакомство с роботами LEGO MINDSTORMS EV3 EDU |
8 |
4 |
4 |
|
|
2.1. |
Конструктор LEGO MINDSTORMS EV3 |
2 |
1 |
1 |
Опрос |
|
2.2. |
Модуль EV3. |
2 |
1 |
1 |
Выполнение практического задания |
|
2.3. |
Сервомоторы EV3 |
2 |
2 |
0 |
Опрос |
|
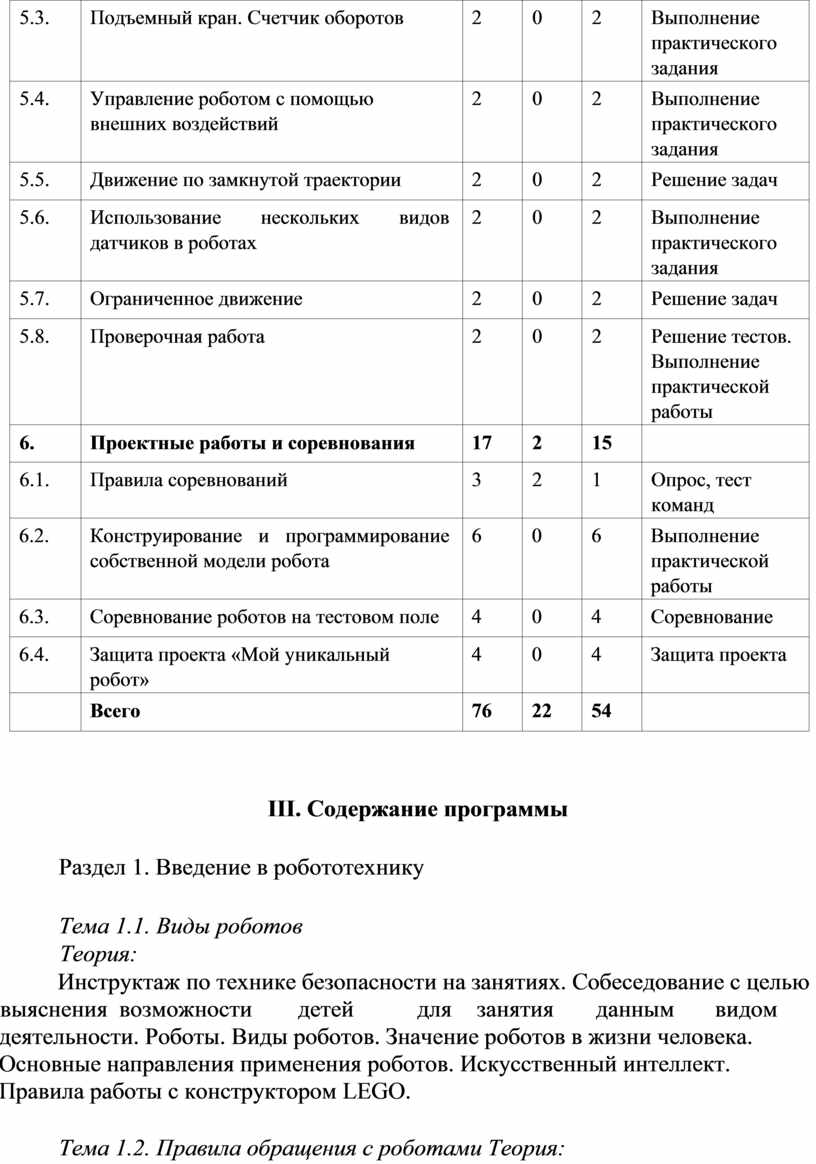
2.4. |
Сборка и программирование роботов |
2 |
0 |
2 |
Выполнение практической работы |
|
3. |
Датчики LEGO MINDSTORMS EV3 EDU и их параметры |
12 |
5 |
7 |
|
|
3.1. |
Датчик касания |
2 |
1 |
1 |
Решение задач |
|
3.2. |
Датчик цвета |
2 |
1 |
1 |
Решение задач |
|
3.3. |
Датчик расстояния |
2 |
1 |
1 |
Решение задач |
|
3.4. |
Датчик приближения |
2 |
1 |
1 |
Решение задач |
|
3.5. |
Подключение датчиков и моторов |
2 |
1 |
1 |
Выполнение практического задания |
|
3.6. |
Проверочная работа |
2 |
0 |
2 |
Решение тестов. Выполнение практической работы |
|
4. |
Основы программирования и компьютерной логики |
19 |
6 |
13 |
|
|
4.1. |
Среда программирования модуля |
2 |
1 |
1 |
Выполнение практического задания |
|
4.2. |
Методы принятия решений роботом |
2 |
2 |
0 |
Опрос |
|
4.3. |
Программное обеспечение EV3. Среда LABVIEW |
2 |
1 |
1 |
Решение задач |
|
4.4. |
Программные блоки и палитры программирования |
2 |
1 |
1 |
Выполнение практического задания |
|
4.5. |
Движение по кривой |
2 |
0 |
2 |
Решение задач |
|
4.6. |
Движение с остановкой на черной линии |
5 |
1 |
4 |
Решение задач |
|
4.7. |
Программирование модулей |
4 |
0 |
4 |
Соревнование роботов на тестовом поле |
|
5. |
Практикум по сборке роботизированных систем |
16 |
1 |
15 |
|
|
5.1. |
Распознавание цветов |
2 |
1 |
1 |
Выполнение практического задания |
|
5.2. |
Сканирование местности |
2 |
0 |
2 |
Выполнение практического задания |
|
5.3. |
Подъемный кран. Счетчик оборотов |
2 |
0 |
2 |
Выполнение практического задания |
|
5.4. |
Управление роботом с помощью внешних воздействий |
2 |
0 |
2 |
Выполнение практического задания |
|
5.5. |
Движение по замкнутой траектории |
2 |
0 |
2 |
Решение задач |
|
5.6. |
Использование нескольких видов датчиков в роботах |
2 |
0 |
2 |
Выполнение практического задания |
|
5.7. |
Ограниченное движение |
2 |
0 |
2 |
Решение задач |
|
5.8. |
Проверочная работа |
2 |
0 |
2 |
Решение тестов. Выполнение практической работы |
|
6. |
Проектные работы и соревнования |
17 |
2 |
15 |
|
|
6.1. |
Правила соревнований |
3 |
2 |
1 |
Опрос, тест команд |
|
6.2. |
Конструирование и программирование собственной модели робота |
6 |
0 |
6 |
Выполнение практической работы |
|
6.3. |
Соревнование роботов на тестовом поле |
4 |
0 |
4 |
Соревнование |
|
6.4. |
Защита проекта «Мой уникальный робот» |
4 |
0 |
4 |
Защита проекта |
|
|
Всего |
76 |
22 |
54 |
|
Раздел 1. Введение в робототехнику
Тема 1.1. Виды роботов Теория:
Инструктаж по технике безопасности на занятиях. Собеседование с целью выяснения возможности детей для занятия данным видом деятельности. Роботы. Виды роботов. Значение роботов в жизни человека. Основные направления применения роботов. Искусственный интеллект. Правила работы с конструктором LEGO.
Тема 1.2. Правила обращения с роботами Теория:
Правила техники безопасности при работе с роботами-конструкторами. Правила обращения с роботами. Управление роботами. Методы общения с роботом.
Раздел 2. Знакомство с роботами LEGO MINDSTORMS EV3 EDU
Тема 2.1. Конструктор LEGO MINDSTORMS EV3 Теория:
Визуальные языки программирования, их основное назначение и возможности. Команды управления роботами. Среда программирования модуля, основные блоки.
Практика:
Основные механические детали конструктора, их название и назначение.
Тема 2.2. Модуль EV3 Теория:
Модуль EV3. Обзор, экран, кнопки управления модулем, индикатор состояния, порты. Установка батарей, способы экономии энергии.
Включение модуля EV3.
Практика:
Запись программы и запуск ее на выполнение.
Тема 2.3. Сервомоторы EV3 Теория:
Сервомоторы EV3, сравнение моторов. Мощность и точность мотора.
Механика механизмов и машин. Виды соединений и передач и их свойства.
Тема 2.4. Сборка и программирование роботов Практика:
Сборка роботов. Сборка модели робота по инструкции. Программирование движения вперед по прямой траектории. Расчет числа оборотов колеса для прохождения заданного расстояния.
Раздел 3. Датчики LEGO MINDSTORMS EV3 EDU и их параметры
Тема 3.1. Датчик касания Теория:
Датчики. Датчик касания. Устройство датчика.
Практика:
Решение задач на движение с использованием датчика касания.
Тема 3.2. Датчик цвета Теория:
Датчик цвета, режимы работы датчика.
Практика:
Решение задач на движение с использованием датчика цвета.
Тема 3.3. Датчик расстояния Теория:
Ультразвуковой датчик.
Практика:
Решение задач на движение с использованием датчика расстояния.
Тема 3.4. Датчик приближения Теория:
Гироскопический датчик. Инфракрасный датчик, режим приближения, режим маяка.
Практика:
Решение задач на движение с использованием датчика приближения.
Тема 3.5. Подключение датчиков и моторов Теория:
Интерфейс модуля EV3. Приложения модуля. Представление порта.
Практика:
Подключение датчиков и моторов. Управление мотором.
Тема 3.6. Проверочная работа Практика:
Проверочная работа по темам разделов «Знакомство с роботами LEGO MINDSTORMS», «Датчики LEGO и их параметры».
Раздел 4. Основы программирования и компьютерной логики
Тема 4.1. Среда программирования модуля Теория:
Среда программирования модуля.
Практика:
Создание программы. Удаление блоков. Выполнение программы. Сохранение и открытие программы.
Тема 4.2. Методы принятия решений роботом Теория:
Счетчик касаний. Ветвление по датчикам. Методы принятия решений роботом. Модели поведения при разнообразных ситуациях.
Тема 4.3. Программное обеспечение EV3. Среда LABVIEW Теория:
Программное обеспечение EV3. Среда LABVIEW. Основное окно.
Свойства и структура проекта.
Практика:
Решение задач на движение вдоль сторон квадрата. Использование циклов при решении задач на движение.
Тема 4.4. Программные блоки и палитры программирования Теория:
Программные блоки и палитры программирования. Страница средств.
Редактор контента. Инструменты.
Практика:
Устранение неполадок. Перезапуск модуля.
Тема 4.5. Движение по кривой Практика:
Решение задач на движение по кривой. Независимое управление моторами. Поворот на заданное число градусов. Расчет угла поворота.
Тема 4.6. Движение с остановкой на черной линии Теория:
Использование нижнего датчика освещенности.
Практика:
Решение задач на движение с остановкой на черной линии. Решение задач на движение вдоль линии. Калибровка датчика освещенности.
Тема 4.7. Программирование модулей Практика:
Программирование модулей. Решение задач на прохождение по полю из клеток. Соревнование роботов на тестовом поле.
Раздел 5. Практикум по сборке роботизированных систем
Тема 5.1. Распознавание цветов Теория:
Использование конструктора Lego в качестве цифровой лаборатории.
Практика:
Измерение освещенности. Определение цветов. Распознавание цветов.
Тема 5.2. Сканирование местности Практика:
Измерение расстояний до объектов. Сканирование местности.
Тема 5.3. Подъемный кран. Счетчик оборотов Практика:
Сила. Плечо силы. Подъемный кран. Счетчик оборотов. Скорость вращения сервомотора. Мощность.
Тема 5.4. Управление роботом с помощью внешних воздействий Практика:
Управление роботом с помощью внешних воздействий. Реакция робота на звук, цвет, касание. Таймер.
Тема 5.5. Движение по замкнутой траектории Практика:
Движение по замкнутой траектории. Решение задач на криволинейное движение.
Тема 5.6. Использование нескольких видов датчиков в роботах Практика:
Конструирование моделей роботов для решения задач с использованием нескольких видов датчиков.
Тема 5.7. Ограниченное движение Практика:
Решение задач на выход из лабиринта. Ограниченное движение.
Тема 5.8. Проверочная работа
Практика:
Проверочная работа по темам разделов «Основы программирования и компьютерной логики», «Практикум по сборке роботизированных систем».
Раздел 6. Проектные работы и соревнования
Тема 6.1. Правила соревнований Теория:
Работа над проектами «Движение по заданной траектории», «Кегельринг». Правила соревнований.
Тема 6.2. Конструирование и программирование собственной модели робота
Практика:
Конструирование собственной модели робота. Программирование и испытание собственной модели робота.
Тема 6.3. Соревнование роботов на тестовом поле Практика:
Соревнование роботов на тестовом поле.
Тема 6.4. Защита проекта «Мой уникальный робот» Практика:
Подведение итогов работы учащихся. Подготовка презентаций. Защита проекта «Мой уникальный робот».
IV. Методическое обеспечение программы.
Реализация Программы строится на принципах: «от простого к сложному». На первых занятиях используются все виды объяснительноиллюстративных методов обучения: объяснение, демонстрация наглядных пособий. На этом этапе обучающиеся выполняют задания точно по образцу и объяснению. В дальнейшем с постепенным усложнением технического материала подключаются методы продуктивного обучения такие, как метод проблемного изложения, частично-поисковый метод, метод проектов. В ходе реализации Программы осуществляется вариативный подход к работе.
Творчески активным обучающимся предлагаются дополнительные или альтернативные задания.
Формы проведения занятий:
• инструктаж;
• беседа;
• лекция-диалог;
• практическое занятие;
• индивидуальная сборка робототехнических средств;
• тренировки в учебном кабинете;
• соревнования роботов на тестовом поле.
Основные принципы обучения:
1. Научность. Этот принцип предопределяет сообщение обучаемым только достоверных, проверенных практикой сведений, при отборе которых учитываются новейшие достижения науки и техники.
2. Доступность. Предусматривает соответствие объема и глубины учебного материала уровню общего развития обучающихся в данный период.
3. Связь теории с практикой. Обязывает вести обучение так, чтобы учащиеся могли сознательно применять приобретенные ими знания на практике.
4. Воспитательный характер обучения. Процесс обучения является воспитывающим, учащийся не только приобретает знания и нарабатывает навыки, но и развивает свои способности, умственные и моральные качества.
5. Наглядность. Объяснение техники сборки робототехнических средств на конкретных изделиях и программных продукта.
6. Систематичность и последовательность. Учебный материал дается по определенной системе и в логической последовательности с целью лучшего его освоения (от простого к сложному, от частного к общему).
7. Прочность закрепления знаний, умений и навыков. Качество обучения зависит от того, насколько прочно закрепляются знания, умения и навыки учащихся.
8. Индивидуальный подход в обучении. В процессе обучения педагог исходит из индивидуальных особенностей обучающихся.
Материально-технические условия реализации Программы
Для обеспечения учебного процесса в соответствии с Программой необходимо:
− учебный кабинет, оборудованный в соответствии с санитарногигиеническими требованиями на 8 ученических мест;
− ноутбук, с установленным программным обеспечением для LEGO EV3 (8 компьютеров и компьютер преподавателя), для программирования робототехнических средств, программирования контроллеров конструкторов, настройки самих конструкторов, отладки программ, проверка совместной работоспособности программного продукта и модулей конструкторов;
− стол для испытаний роботов (размер 2000х4000 мм);
− игровые поля, окрашенные внутри в черный цвет (размер 2340х1140 мм, высота бортиков – 90 мм);
− листы ватмана для нанесения трассы и препятствий, черная и цветная изоляционные ленты разной ширины, скотч, двойной скотч, ножницы;
− набор конструкторов LEGO MINDSTORMS Education EV3;
− программное обеспечение LEGO.
V. Список литературы
1. Федеральный Закон РФ от 29.12.2012 г. № 273 «Об образовании в
Российской Федерации» (в редакции Федерального закона от 31.07.2020 № 304ФЗ «О внесении изменений в Федеральный закон «Об образовании в Российской Федерации» по вопросам воспитания обучающихся»).
2. Приказ Минпросвещения России № 196 от 09.11.2018 «Об утверждении Порядка организации и осуществления образовательной деятельности по дополнительным общеобразовательным программам».
3. Санитарно-эпидемиологические требования к устройству, содержанию и организации режима работы образовательных организаций дополнительного образования детей (СанПиН 2.4.3648-20 от 28.09. 2020 г. № 28).
1. Злаказов А.С. Уроки Лего-конструирования в школе: методическое пособие/ А.С. Злаказов, Г.А. Горшков, С.Г. Шевалдина. – М.: БИНОМ. Лаборатория знаний, 2011. – 120 с.
2. Копосов Д.Г. Первый шаг в робототехнику. Практикум для 5-6 классов/ Д.Г. Копосов. – М.: БИНОМ. Лаборатория знаний, 2012 – 292 с.
3. Овсяницкая Л.Ю. Алгоритмы и программы движения робота Lego Mindstorms EV3 по линии / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий. –М.: Издательство «Перо», 2015. – 168с.
4. Овсяницкая Л.Ю. Курс программирования робота Lego Mindstorms EV3 в среде EV3: основные подходы, практические примеры, секреты мастерства / Л.Ю. Овсяницкая, Д.Н. Овсяницкий, А.Д. Овсяницкий. – Челябинск: ИП Мякотин И.В., 2014. - 204с.
1. MINDSTORMS® | Серии | LEGO.com RU (Дата обращения: 19.03.2021)
2. MINDSTORMS EV3 | STEAM в старших классах | LEGO® Education (Дата обращения: 19.03.2021).
3. Международные состязания роботов (wroboto.ru). (Дата обращения:
19.03.2021).
4. РобоКлуб. Практическая робототехника: [Электронный ресурс]. URL: http://www.roboclub.ru. (Дата обращения: 19.03.2021).
Начало учебного года – 2 сентября
Окончание учебного года – 31 мая
|
№ |
Год обучения |
Всего учебных недель |
Кол-во учебных дней |
Объем учебных часов |
Режим работы |
|
1 |
Первый |
38 |
38 |
76 |
1 раз в неделю по 2 часа |
Результативность обучения обеспечивается применением различных форм, методов и приемов, которые тесно связаны между собой и дополняют друг друга. Большая часть занятий отводится практической работе.
Содержание и объем материала, подлежащего проверке, определяется Программой. Текущий контроль уровня усвоения материала осуществляется по окончании изучения каждой темы – выполнением практических заданий, каждого раздела – выполнением зачетной работы. Промежуточный контроль проходит в середине учебного года в форме открытого занятия. Итоговый контроль проходит в конце учебного года – в форме мини-соревнований по сборке и программированию моделей Lego Education EV3 и выставки самостоятельно созданных моделей.
Создатели лучших моделей имеют возможность принять участие в соревнованиях, фестивалях, выставках по робототехнике различного уровня.
Формы проведения аттестации:
§ тестирование;
§ практическое задание;
§ зачетная работа;
§ открытое занятие;
§ соревнование;
§ выставка.
Для отслеживания результативности на протяжении всего процесса обучения осуществляются:
• входная диагностика (сентябрь) в форме собеседования – позволяет выявить возможности детей для занятия данным видом деятельности (проводится на первом занятии данной Программы);
• текущий контроль (в течение всего учебного года) – проводится после прохождения каждой темы, чтобы выявить пробелы в усвоении материала и развитии обучающихся, заканчивается коррекцией усвоенного материала;
• промежуточная аттестация – проводится 2 раза в течение учебного года по изученным темам и разделам для выявления уровня усвоения содержания Программы и своевременной коррекции учебно-воспитательного процесса (форма проведения: решение тестов, выполнение практической работы);
• итоговая аттестация - проводится в конце учебного года (май) и позволяет оценить уровень результативности усвоения Программы за год (форма проведения: соревнование, защита проекта).

Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.