Поделиться

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
КЕМЕРОВСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ПИЩЕВОЙ
ПРОМЫШЛЕННОСТИ
Н.А. Бахтин, А.М. Осинцев, А.В. Попов
Конспект лекций
Часть I
Основы классической механики
Основы молекулярной физики и термодинамики
УДК: 53(075)
Печатается по решению Редакционно-издательского совета Кемеровского технологического института пищевой промышленности.
Рецензенты:
доцент кафедры товароведения и экспертизы товаров Кемеровского института Российского государственного торгово-экономического университета, канд. физ.-мат. наук М.Н. Сидоров;
заведующий лабораторией кемеровского филиала Института химии твердого тела и механохимии CO РАН, канд. хим. наук В.П. Бервено
Бахтин Н.А., Осинцев А.М., Попов А.В.
Физика: Конспект лекций. Часть I – Кемеровский технологический институт пищевой промышленности. – Кемерово, 2003. – 92 с.
В учебном пособии в краткой и доступной форме изложены теоретические сведения по основным разделам классической механики, молекулярной физики и термодинамики. Пособие может быть полезным для самостоятельной работы студентов как дневной, так и заочной форм обучения.
1603020000
Ф ![]()
У50(03)-03
|
ISBN 5-89289-236-0
|
– Кемеровский технологический институт пищевой промышленности, 2003 |
Вы приступаете к изучению курса физики. Это краткое пособие составлено для того, чтобы сократить вам время для нахождения материала из многих учебных пособий, оно содержит только информацию, необходимую для решения контрольных работ и сдачи экзаменов. Надеемся, что в будущем, при работе по специальности, вы будете получать знания не из кратких пособий, а из более основательных источников. Но у вас сейчас слишком много предметов, и мало времени, чтобы читать толстые книги. Вместе с тем, для желающих расширить свои знания по физике, глубже проникнуть в основы законов, по которым развивается Вселенная, мы рекомендуем не ограничиваться чтением этого пособия.
Предмет физики
Физика – наука, изучающая наиболее простые и вместе с тем наиболее общие закономерности явлений природы, свойства и строение материи, и законы ее движения. Изучая какое-то явление, физики не ставят целью выяснить как можно больше фактов, а выделяют в этом явлении то, что объединяет его со всеми явлениями природы.
Слово φυσισ в переводе с греческого языка означает природа. T.e. физика вскрывает основу, сущность явления. Понять физику явления значит – понять его сущность, внутреннее основное свойство явления, скрытую закономерность.
Физика относится к естественным наукам. Однако существуют и другие естественные науки: химия, биология, география, астрономия. Какое место занимает физика среди других наук? Отметим сразу, что физика самая фундаментальная из всех естественных наук. Она является базой для развития других естественных наук, так как именно физические законы лежат в основе всех сложных явлений природы. Например, теоретическая химия в настоящее время свелась к квантовой механике – одному из разделов теоретической физики; биология, геология, астрономия стали подлинными, а не описательными науками только после того, как стали применять физические методы и приборы.
Развиваясь в тесном контакте с техникой и, будучи ее фундаментом, физика проникла практически во все области промышленности, создав саму возможность появления многих новых ее отраслей. В физических лабораториях зародилась лазерная технология, голография, радиоэлектроника, атомная энергетика.
Инженер, работает в мире, где все определяется физическими законами. Поэтому изучению физики необходимо уделить особое внимание. Мы живем в постоянно меняющемся мире. Для того чтобы быстро адаптироваться в этом мире, нужно иметь очень хорошую физико-математическую или, как говорят, фундаментальную подготовку.
Рекомендуемая литература
1. Т.И. Трофимова. Курс физики: Учебник для студентов вузов.
2. И.В. Савельев. Курс общей физики. т. 1,2,3.
3. Г.A. Зисман, О.Т. Тодес. Курс общей физики. т. 1,2.
ОСНОВЫ КЛАССИЧЕСКОЙ МЕХАНИКИ
Механика состоит из трех разделов: кинематики, статики и динамики. Статика изучает условия равновесия тел. Поскольку равновесие тел является частным случаем движения, законы статики оказываются естественным следствием законов динамики. По этой причине в курсах физики статика обычно не изучается. Статику вы будете изучать в курсе теоретической механики. А мы начнем изучение механики с кинематики.
Основные понятия.
Кинематикой называется раздел механики, изучающий перемещение тел без учета взаимодействий между ними. Кинематика ограничивается разработкой способов описания движения тел, не рассматривая причины, которые изменяют состояние движения.
Движение происходит в пространстве и во времени. Все тела обладают пространственной протяженностью и как-то расположены друг относительно друга. Механическое движение состоит в изменении положения тел относительно друг друга. Т.е. движение всегда относительно. Каждое тело всегда движется относительно каких-то других тел. Представим себе изолированное тело в пространстве, из которого удалены все другие тела. Говорить о движении такого тела бессмысленно.
Для описания движения объектов в механике используют различные модельные представления. Наиболее простыми из них являются понятия материальной точки и абсолютно твердого тела.
Материальной точкой мы будем называть тело, размерами которого в условиях данной задачи можно пренебречь. Это, конечно, абстракция, которая является простейшей моделью тела. Абсолютно твердое тело – это тело, состоящее из материальных точек, расстояния между которыми не изменяются.
Тело, относительно которого мы будем рассматривать движение другого тела, называется телом отсчета. Очень часто за тело отсчета берут Землю. С телом отсчета связывают систему координат. Вместе они образуют систему отсчета (как показывает теория относительности, каждую систему отсчета необходимо снабдить еще и собственными часами). Чаще всего мы будем пользоваться декартовой системой координат.
![]() В
декартовой системе координат положение материальной точки определяется тремя числами – координатами x, y и z. Три числа являются отражением того факта,
что пространство трехмерно. В системе
СИ координаты измеряются в метрах
(м). делено и с
помощью радиус-вектора r . Радиусвектором называется вектор, проекции которого на координатные оси равны x, y, z. Его начало совпадает с началом
координат, а конец лежит в точке
с координатами x, y, z (рис.1). Обычно в учебниках
векторы обозначаются жирным шрифтом r. Мы для обозначения
вектора будем использовать букву со стрелкой
r . Нежирной буквой, соответствующей данному вектору, но без
стрелки, обозначают длину вектора. Длину радиус-вектора можно найти по теореме
Пифагора r =| r |= x2
+ y2
+ z2
.
В
декартовой системе координат положение материальной точки определяется тремя числами – координатами x, y и z. Три числа являются отражением того факта,
что пространство трехмерно. В системе
СИ координаты измеряются в метрах
(м). делено и с
помощью радиус-вектора r . Радиусвектором называется вектор, проекции которого на координатные оси равны x, y, z. Его начало совпадает с началом
координат, а конец лежит в точке
с координатами x, y, z (рис.1). Обычно в учебниках
векторы обозначаются жирным шрифтом r. Мы для обозначения
вектора будем использовать букву со стрелкой
r . Нежирной буквой, соответствующей данному вектору, но без
стрелки, обозначают длину вектора. Длину радиус-вектора можно найти по теореме
Пифагора r =| r |= x2
+ y2
+ z2
.
При движении частицы радиус вектор изменяется во времени, т.е. является функцией времени:
r = r t( ) = x t e( ) x + y t e( ) y + z t e( ) z ,
где ex, ey, ez – единичные векторы (орты), направленные вдоль соответствующих осей x, y, z. Эта функция определяет положение частицы в зависимости от времени, т.е. задает закон движения точки.
При движении частицы конец радиус-вектора описывает в пространстве линию, которая называется траекторией частицы. Форма траектории зависит от выбора системы отсчета. Действительно, пусть тело падает в вагоне, который движется равномерно и прямолинейно относительно Земли. Тогда траектория этого тела относительно вагона будет прямая линия, относительно же Земли это будет парабола. Нельзя говорить о форме траектории s
 вообще; речь может идти лишь
о форме траектории в заданной
системе отсчета. Решение кинематической задачи может быть существенно
упрощено правильным выбором системы координат.
вообще; речь может идти лишь
о форме траектории в заданной
системе отсчета. Решение кинематической задачи может быть существенно
упрощено правильным выбором системы координат.
Пусть материальная точка переместилась вдоль некоторой траектории из точки 1, характеризующуюся радиус-вектором r1 в точку 2, характеризующуюся радиус-вектором r2 (рис.2). Расстояние между точками 1 и Рис. 2.
2, отсчитанное вдоль траектории, называется пройденным путем. Будем обозначать его буквой S.
Вектор ∆r , проведенный из точки 1 в точку 2, называется перемещением частицы. Согласно правилам сложения векторов ∆ =r r2 − r1.
Скорость
В физике под скоростью понимают векторную величину, характеризующую не только быстроту перемещения частиц по траектории, но и направление, в котором частица движется в каждый момент времени.
Формулу для
скорости можно получить следующим образом. Пусть за время
∆t радиус-вектор получил приращение ∆r
. Отношение ∆r![]() ∆t дает
среднее значение скорости за время
∆t. Мгновенная
скорость определяется как предел
∆t дает
среднее значение скорости за время
∆t. Мгновенная
скорость определяется как предел
∆r dr
![]() υ= lim = .
υ= lim = .
∆→t 0 ∆t dt
Вектор υ направлен как и dr , а следовательно, по касательной к траектории. Вообще говоря, величина ∆S пройденного за время ∆t пути отличается от ∆s
модуля перемещения ∆r. Однако если ∆t устремить
к нулю, то предел
lim ![]() =1,
=1,
∆→t 0 ∆r откуда следует, что модуль мгновенной скорости равен производной от пути по времени:
ds υ= ![]() . dt
. dt
В системе СИ время измеряется в секундах (с), а скорость имеет размерность м/с.
Ускорение
Скорость частицы υ может изменяться со временем как по величине, так и по направлению. Быстрота изменения вектора υ определяется производной вектора υ по t. Обозначив эту производную буквой a, получим
dυ
a = ![]() . dt
. dt
Величина a, называется ускорением частицы и имеет размерность м/с2.
Ускорение при криволинейном движении
Рассмотрим участок траектории между двумя близкими соседними точками
(рис.3). Скорости в этих точках υ1 и М1 υ1 А
 υ2 направлены по касательным
к траектории и отличаются
друг от друга по величине
и направлению. Перенесем вектор υ2 параллельно самому себе в
точку М1. Соединим теперь конец вектора υ1 с концом
перенесенного вектора υ2 вектором ∆υ. Из чертежа
видно, что ∆ = −υ υ
υ2
1, т.е. вектор
∆υ есть приращение
вектора υ за время ∆t.
υ2 направлены по касательным
к траектории и отличаются
друг от друга по величине
и направлению. Перенесем вектор υ2 параллельно самому себе в
точку М1. Соединим теперь конец вектора υ1 с концом
перенесенного вектора υ2 вектором ∆υ. Из чертежа
видно, что ∆ = −υ υ
υ2
1, т.е. вектор
∆υ есть приращение
вектора υ за время ∆t.
На векторе υ2 отметим точку С так, чтобы |M1A|=|M1C|. Соединим конец вектора υ1 с точкой С. Из рисунка видно, что вектор ∆υ может быть представлен как геометрическая сумма двух векторов:
∆ =∆ +∆υ υ υk n .
Вектор ∆υk численно характеризует изменение модуля скорости за время ∆t: ∆ = − =∆υk υ υ υ2 1 .
Если величина скорости υ во время движения не меняется, то ∆υ = 0 и ∆υk = 0.
Вектор ∆υk характеризует изменение направления вектора скорости за время ∆t.
Он направлен в сторону вогнутости кривой. Если с течением времени направление движения не меняется, то векторы υ1 и υ2 направлены вдоль одной и той же прямой и ∆υk = 0.
Разделив ∆υ на ∆t и устремив ∆t → 0, получим:
![]()
![]()
![]() ∆υ
∆υk
+ lim ∆υn
= +ak an
.
∆υ
∆υk
+ lim ∆υn
= +ak an
.
a = lim = lim
∆→t 0 ∆t ∆→t 0 ∆t ∆→t 0 ∆t
При ∆t → 0 точки M1 и M2 приближаются друг к другу, также как и точки A и C. Тогда угол при вершине M1 равнобедренного треугольника М1АС стремится к нулю, и направления векторов υ2 и ∆υk стремятся к направлению вектора υ1.
![]() ∆υk также направлен вдоль вектора υ1, т.е.
по касатель-
∆υk также направлен вдоль вектора υ1, т.е.
по касатель-
Поэтому вектор ak = lim ∆→t 0 ∆t
ной к траектории. Численное значение этого вектора равно
![]() ∆υk
= dυ, ak
= lim
∆υk
= dυ, ak
= lim
∆→t 0 ∆t dt
т.е. характеризует быстроту изменения модуля вектора скорости при движении. Этот вектор называется касательным, или тангенциальным, ускорением.
Определим величину и направление второго вектора an . Пусть все точки траектории лежат в одной плоскости. Восставим в точках М1 и М2 перпендикуляры к касательным до их пересечения в точке О. Дуга ∆S = M1M2 будет практически частью окружности с центром в точке О и радиусом R = OM1 = OM2.
Пусть угол между отрезками ОМ1 и ОМ2, измеряемый в радианах, равен ∆ϕ. Тогда длина дуги равна ∆S= R∆ϕ. R носит название радиуса кривизны траектории, а величина 1/R – кривизны траектории. Точка O называется центром кривизны.
Соединив точки М1 и М2, получим второй равнобедренный треугольник ОМ1М2 вдобавок к существующему М1АС. Т.к. OM1 ⊥ AM1 и OM2 ⊥ CM1 , эти треугольники подобны друг другу. Из их подобия получим ∆r/∆υn = R/υ1, или ∆υn = ∆r⋅υ1/R.
Отсюда можно найти величину вектора an :
an
![]() .
(1.1)
.
(1.1)
∆→t 0 ∆t ∆→t 0 R ⋅∆t R
![]() В пределе при ∆t → 0 угол при вершине
M1 треугольника
М1АС стремится к нулю,
а углы при основаниях
стремятся к 90°. Следовательно, an в пределе
перпендикулярен скорости и направлен
к центру кривизны траектории. Вектор an носит название нормального ускорения. Тангенциальное и нормальное
ускорения взаимно перпендикулярны, их геометрическая
сумма равна полному ускорению a = +ak
an
, а модуль (длина) вектора полного ускорения есть a =
+ak2
an2
.
В пределе при ∆t → 0 угол при вершине
M1 треугольника
М1АС стремится к нулю,
а углы при основаниях
стремятся к 90°. Следовательно, an в пределе
перпендикулярен скорости и направлен
к центру кривизны траектории. Вектор an носит название нормального ускорения. Тангенциальное и нормальное
ускорения взаимно перпендикулярны, их геометрическая
сумма равна полному ускорению a = +ak
an
, а модуль (длина) вектора полного ускорения есть a =
+ak2
an2
.
Движение материальной точки по окружности
Пусть точка движется по окружности радиуса R с постоянной скоростью v. Тогда величина вектора нормального ускорения an остается постоянной, а сам вектор направлен к центру окружности. В этом случае ускорение an называют центростремительным.
Пусть за время ∆t точка прошла путь ∆S, при этом радиус-вектор повернулся на угол ∆ϕ. Угол, радиус-вектор и путь связаны соотношением ∆S = R⋅∆ϕ.
![]() Разделив путь на
время, получим ∆S
Разделив путь на
время, получим ∆S![]() ∆t = R⋅∆ϕ
∆t
, или
∆t = R⋅∆ϕ
∆t
, или
υ= R ⋅ω, (1.2)
![]()
![]() где величина
ω =∆ ∆ϕt (в
пределе – ω =dϕdt ) носит название угловой скорости и измеряется
в рад/с. Знак
угловой скорости определяет, в какую
сторону совершается поворот: ω > 0, если
точка вращается против часовой стрелки; ω < 0, если
точка вращается по часовой
стрелке.
где величина
ω =∆ ∆ϕt (в
пределе – ω =dϕdt ) носит название угловой скорости и измеряется
в рад/с. Знак
угловой скорости определяет, в какую
сторону совершается поворот: ω > 0, если
точка вращается против часовой стрелки; ω < 0, если
точка вращается по часовой
стрелке.
Равномерное вращение характеризуется периодом обращения Т, под которым понимается время, за которое точка делает один оборот, т.е. поворачивается на угол ϕ = 2π . Очевидно, что ω = 2π/T.
Число оборотов в единицу времени ν (частота вращения) равно ν = 1/T = ω /2π.
Следовательно, угловая скорость есть
ω = 2πν. (1.3)
Угловую скорость можно представить как вектор ω, перпендикулярный плоскости вращения, величина которого находится из формулы (1.3), а направление определяется правилом «правого винта»: оно должно быть таким, чтобы, глядя вдоль него, мы наблюдали вращение точки по часовой стрелке. При этом υ=[ω× r].
![]() Если точка движется по окружности
не с постоянной скоростью, то ω изменяется по времени.
Изменение угловой скорости со временем
характеризуется величиной β ω= ddt , которую называют угловым ускорением.
Если точка движется по окружности
не с постоянной скоростью, то ω изменяется по времени.
Изменение угловой скорости со временем
характеризуется величиной β ω= ddt , которую называют угловым ускорением.
Динамика изучает движение в связи с теми причинами, которые обуславливают тот или иной характер движения. В основе классической, или ньютоновской, механики лежат три закона, сформулированные Исааком Ньютоном в 1687 году.
Законы Ньютона
Первый закон Ньютона
Всякое тело сохраняет состояние покоя или равномерного и прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит изменить это состояние.
Явление, описываемое первым законом Ньютона, называется инерцией.
Первый закон выполняется не во всякой системе. Система отсчета, в которой выполняется первый закон, называется инерциальной. Часто первый закон Ньютона считают законом, определяющим инерциальные системы отсчета. Инерциальными системами являются также все системы, которые либо покоятся, либо движутся равномерно и прямолинейно относительно какой-то инерциальной системы отсчета, установленной с помощью первого закона Ньютона.
С большой степенью точности инерциальной можно считать гелиоцентрическую систему координат, т.е. систему координат, связанную с Солнцем.
Земля не является инерциальной системой координат. Однако ускорение такой системы настолько мало, что в большинстве случаев ее можно считать инерциальной.
Масса и импульс тела
Если на тело не действуют другие тела, то оно сохраняет состояние покоя или движется равномерно и прямолинейно. Если же на тело воздействуют другие тела, то оно изменяет свою скорость. Опыт показывает, что одинаковые воздействия сообщают различным телам разные по величине ускорения. Всякое тело противится попыткам изменить его состояние движения. Это свойство тел называется инертностью. Количественной мерой инертности тела является масса. В системе СИ масса измеряется в килограммах (кг).
Возьмем два тела с массами m1 и m2 и поставим их в такие условия, чтобы они взаимодействовали между собой. Скорости частиц получат приращение ∆υ1 и ∆υ2. Опыт показывает, что эти приращения всегда противоположно направлены. Отношение модулей приращений всегда определяется выражением
 ∆υ1 = m1 .
∆υ1 = m1 .
∆υ2 m2
Это отношение с учетом направлений векторов можно переписать в виде m1 ⋅∆υ1 = −m2 ⋅ ∆υ2, или ∆(m1 ⋅υ1) = −∆(m2 ⋅υ2).
Скорости тел изменяются различным образом, но произведение mυ для обоих тел изменяется одинаково (с точностью до знака).
Произведение массы тела на его скорость называется импульсом тела. Обозначив импульс тела буквой p, получим p = mυ.
Второй закон Ньютона
Скорость изменения импульса тела равна действующей на тело результирующей силе: dp
F = ![]() , где F = ∑Fi (2.1) dt i
, где F = ∑Fi (2.1) dt i
Второй закон Ньютона справедлив только в инерциальных системах отсчета.
Если при движении масса тела не изменяется, то уравнение (2.1) можно записать в следующем виде:
dp d m( υ) dυ
 F = = = m⋅
F = = = m⋅ ![]() ,
или F = m a⋅ , (2.2) dt dt dt
,
или F = m a⋅ , (2.2) dt dt dt
а ускорение a = F m. Таким образом, ускорение, приобретаемое телом, совпадает по направлению с действующей на него силой и равно отношению этой силы к массе тела.
Второй закон положен в основу определения единицы силы в системе СИ. За единицу силы принимают силу, которая массе в 1 кг сообщает ускорение 1 м/с2. Эта единица называется ньютоном (Н).
В механике большое значение имеет принцип суперпозиции. Если на тело действует несколько сил, то каждая из этих сил сообщает материальной точке ускорение согласно второму закону Ньютона, как будто другие силы отсутствуют. Согласно этому принципу, силы и ускорения можно разлагать на составляющие. Использование этого принципа позволяет существенно упростить решение задач.
Третий закон Ньютона
Характер взаимодействия между телами определяется третьим законом Ньютона:
Всякое действие тел друг на друга носит характер взаимодействия; силы, с которыми действуют друг на друга тела, всегда равны по модулю, противоположно направлены и действуют вдоль прямой, соединяющей центры инерции тел:
F12 = −F21.
Иногда третий закон Ньютона формулируют и так: сила действия равна силе противодействия. В любом случае нужно помнить, что этот закон говорит о равенстве сил, приложенных к разным телам. На каждое из взаимодействующих тел действует только одна сила. Так, например, совершенно неправильно считать, что силой противодействия для притяжения тела к Земле является реакция опоры. В этом случае силой противодействия будет сила притяжения Земли к телу, а реакция опоры противодействует весу тела!
Принцип относительности Галилея
 Рассмотрим две системы
отсчета, движущиеся друг относительно
друга с постоянной скоростью υ0 (рис. 4). Найдем
связь между координатами x, y и z некоторой точки Р в
системе К и координатами
x', y' и
z' той же точки в системе
К'. Отсчет времени ведется от момента,
когда начала координат обеих систем совпадали. Как видно
из рисунка, Рис. 4.
Рассмотрим две системы
отсчета, движущиеся друг относительно
друга с постоянной скоростью υ0 (рис. 4). Найдем
связь между координатами x, y и z некоторой точки Р в
системе К и координатами
x', y' и
z' той же точки в системе
К'. Отсчет времени ведется от момента,
когда начала координат обеих систем совпадали. Как видно
из рисунка, Рис. 4.
x = x' + υ0 t ,
y = y', z=z'.
Добавим принятое в нерелятивистской механике положение о том, что время в обеих системах координат протекает одинаково:
t = t'.
Совокупность этих четырех уравнений называется преобразованиями Галилея.
Продифференцировав эти соотношения по времени, найдем связь между скоростями точки по отношению к системам К и К':
υx =υ υ υ υ υ υx′ + 0; y = ′y ; z = z′. Три скалярных уравнения можно заменить одним векторным:
υ=υ υ′ + 0.
Мы получили соотношение между скоростями точек в системах К и К'. Это соотношение называется классическим законом сложения скоростей.
Докажем что любая система, движущаяся относительно некоторой инерциальной системы с постоянной скоростью, также будет инерциальной. Продифференцируем последнее выражение по времени. Получим a = a′.
Ускорение тела во всех системах отсчета, движущихся друг относительно друга прямолинейно и равномерно, оказывается одним и тем же. Но тогда и силы, действующие на тела в системах К и К', будут одинаковы. Следовательно, уравнения динамики (второй и третий законы Ньютона) не изменяются при переходе от одной инерциальной системы отсчета к другой. С механической точки зрения все инерциальные системы отсчета эквивалентны. Практически это означает, что никакими механическими опытами, проведенными в данной системе, невозможно установить, находится ли она в состоянии покоя или равномерного и прямолинейного движения.
Последнее положение носит название принципа относительности Галилея. Галилей (1564-1642) установил, что равномерное прямолинейное движение равноправно состоянию покоя. При описании движения все инерциальные системы эквивалентны, и нет никаких оснований отдавать предпочтение одной из них.
Понятие состояния в классической механике
Общность фундаментальных физических теорий проявляется, прежде всего, в том, что все они вводят в качестве основного понятия – понятие состояния физической системы. Главная и определяющая идея при формировании понятия состояния заключается в следующем: начальное состояние однозначно определяет конечное состояние в зависимости от взаимодействий внутри системы, а также в зависимости от внешних воздействий на систему.
Понятие состояния в физике было впервые отчетливо выявлено при построении классической механики. В классической механике Ньютона – механике системы материальных точек (частиц) – начальные условия задаются совокупностью координат ri и импульсов pi , (или скоростей υi ) всех частиц. Эти величины могут принимать произвольные значения: положение и импульс любой частицы не зависят от положений и импульсов всех других частиц.
Эволюция состояния системы описывается уравнениями движения. Уравнением движения классической нерелятивистской механической системы является второй закон Ньютона, полностью определяющий поведение объектов. Это обстоятельство является решающим для того, чтобы совокупность координат и импульсов всех частиц рассматривать как характеристику состояния системы. Уравнения движения однозначно описывают изменение этого состояния во времени. Они определяют ускорения частиц в зависимости от сил. Силы являются однозначными функциями расстояний между частицами и их относительных скоростей.
Координаты и импульсы (или скорости) – основные физические величины в механике Ньютона, так как определяют состояние системы. Кроме того, все остальные механические величины (наблюдаемые), представляющие интерес для механики (энергия, момент импульса, действие и др.), выражаются в виде функций координат и импульсов.
Сила входит во второй и третий законы Ньютона. Но что такое сила? Сила – есть мера взаимодействия тел. В настоящее время установлены фундаментальные взаимодействия, к которым, в конечном счете, сводятся силы любой природы. Получены законы сил, которые не являются фундаментальными, но имеют достаточно большую область применимости и эффективно используются в физике и технике.
По современным представлениям все многообразие явлений, наблюдаемых во Вселенной, обусловлено четырьмя видами фундаментальных взаимодействий: гравитационными, электромагнитными, слабыми и сильными, или ядерными, взаимодействиями.
Самым слабым является гравитационное взаимодействие. Оно осуществляется между телами с любыми массами и проявляется в форме сил тяготения. Роль сил тяготения возрастает при переходе к большим массам. В микромире силы тяготения практически никакой роли не играют. Их роль является определяющей только в крупномасштабных явлениях.
Электромагнитные взаимодействия осуществляются между телами, в состав которых входят электрически заряженные частицы. Эти взаимодействия обуславливают существование стабильных атомов, связывают атомы в молекулы, являются причиной действия сил между частицами газов, жидкостей, твердых тел, плазмы и играют основную роль во всех физико-химических и биологических процессах. К электрическим взаимодействиям сводятся все силы нефундаментального характера (трение, упругость).
Слабые взаимодействия не способны создавать устойчивые состояния вещества. Они обуславливают нестабильность многих микроскопических частиц, приводя их к распадам, и характерны только для определенного круга микроскопических квантовых процессов.
Ядерные взаимодействия являются наиболее сильными. Именно эти взаимодействия связывают протоны и нейтроны в атомных ядрах. Характерной особенностью сильных ядерных взаимодействий является их малый радиус действия. Они проявляются только в том случае, когда расстояние между сильно взаимодействующими частицами не превышает 10–15 м.
В классической механике все силы имеют гравитационную или электромагнитную природу. Слабые и сильные взаимодействия играют роль в специфических микроскопических явлениях квантовой природы и не могут быть включены в схему классической механики.
Закон всемирного тяготения
История открытия закона всемирного тяготения
К началу 17 века большинство ученых признало гелиоцентрическую систему, предложенную Николаем Коперником (1473-1545). Согласно этой системе, все планеты движутся вокруг Солнца. Однако ученым того времени не были ясны ни законы движения планет, ни причины, определяющие характер их движения. Через полвека после Коперника И. Кеплер (1571-1630), обрабатывая точные наблюдения Т. Браге (1546-1601), а также свои собственные, нашел три кинематических закона движения планет:
1. Каждая планета движется по эллипсу, в одном из фокусов которого находится Солнце (1609).
2. Радиус-вектор, связанный с планетой, “заметает” в равные промежутки времени равные площади (1609).
3. Кубы больших полуосей эллипсов пропорциональны квадратам времен обращения планет (1619).
В 1687 году Ньютон опубликовал свой труд, в котором изложил закон всемирного тяготения. Мы попытаемся проследить за ходом мысли Ньютона, упростив математическую сторону дела.
В первом приближении можно считать, что планеты движутся почти равномерно по орбитам, которые мало отличаются от окружностей. Но при движении тела по окружности имеется нормальное (центростремительное) ускорение, направленное к центру орбиты, где находится Солнце. Из основного закона динамики следует, что это ускорение вызывается некоторой силой. Итак, Солнце действует на каждую планету с некоторой силой.
Известно, что Луна вращается вокруг Земли; очевидно, что они притягиваются друг к другу. Ньютон выдвинул решающее предположение, что сила тяжести, действующая на тела вблизи поверхности Земли, и сила, с которой Земля притягивает Луну, имеет совершенно одинаковое происхождение. Сила, с которой взаимодействует Солнце с планетами, имеет ту же природу.
Итак, пусть планета движется по окружности радиуса R со скоростью v. Тогда, согласно (1.1), (1.2) и (1.3),
υ ω2 2 2R 2 4π2
![]() an = = =ω
R =
an = = =ω
R = ![]() 2
R , (3.1)
2
R , (3.1)
R R T
![]() где
T – период вращения. Согласно третьему закону Кеплера для двух
планет
где
T – период вращения. Согласно третьему закону Кеплера для двух
планет ![]() R13 = T122
, откуда
R123 = R223 = const = K.
R13 = T122
, откуда
R123 = R223 = const = K.
3
R2 T2 T1 T2
K называется постоянной Кеплера. Она не
зависит от параметров планет и всегда
равна K = ![]() R3
. Выразив отсюда T 2 и подставив в выражение
(3.1) для an,
получим
R3
. Выразив отсюда T 2 и подставив в выражение
(3.1) для an,
получим
2
T
an = ![]() 4π22 R =
4π22 R = ![]() 4π22K . Т.к. F
= m⋅a, то
F =4π2K
m⋅ ⋅
4π22K . Т.к. F
= m⋅a, то
F =4π2K
m⋅ ⋅
![]() 12 . Мы видим,
что F ∼ 1/R2.
12 . Мы видим,
что F ∼ 1/R2.
T R R
Для всех планет Солнечной системы коэффициент 4π 2K имеет одно и то же значение. Ньютон предположил, что этот коэффициент зависит от параметров Солнца. Т.к. сила пропорциональна массе планет, то она должна быть пропорциональной и массе Солнца, т.е. 4π 2K = γ⋅М, откуда
Mm
F = γ
![]() 2
. (3.2)
2
. (3.2)
R
![]() Далее Ньютон сравнил ускорение свободного падения g у поверхности Земли с ускорением
аЛ Луны при движении
вокруг Земли, которое было известно
из астрономических наблюдений. Т.к.
aЛ = 2,7⋅10–3 м/с2, то
g
aЛ ≈3600=(RЗ-Л
Далее Ньютон сравнил ускорение свободного падения g у поверхности Земли с ускорением
аЛ Луны при движении
вокруг Земли, которое было известно
из астрономических наблюдений. Т.к.
aЛ = 2,7⋅10–3 м/с2, то
g
aЛ ≈3600=(RЗ-Л ![]() RЗ)2 , как и
должно быть, так как
расстояние от Земли до Луны
составляет 60 земных радиусов: RЗ-Л
= 60 RЗ.
RЗ)2 , как и
должно быть, так как
расстояние от Земли до Луны
составляет 60 земных радиусов: RЗ-Л
= 60 RЗ.
Итак, закон всемирного тяготения формулируется следующим образом:
Сила тяготения между двумя точечными телами пропорциональна массам этих тел и обратно пропорциональна квадрату расстояния меду ними.
Коэффициент γ, входящий в закон тяготения (3.2), называется гравитационной постоянной. Она численно равна силе, с которой действует частицы с единичными массами, расположенными на расстоянии, равном единице.
Генри Кавендиш (1731-1810) в 1798 году опытным путем определил гравитационную постоянную γ. Он получил γ = 6,717⋅10–11 Н⋅м2/кг2. По современным уточненным данным γ = 6,6745⋅10–11 м3/кг·с2.
На основании закона всемирного тяготения нетрудно определить массу и
γМЗ 2 поплотность Земли. Ускорение на поверхности
Земли равно g
= ![]() 2 = 9,8 м/с ,
2 = 9,8 м/с ,
RЗ
этому, зная радиус Земли RЗ и считая Землю однородным шаром, можно найти ее массу. Расчет дает для массы Земли значение МЗ ≈ 6⋅1024 кг. Отсюда средняя плотность Земли ρ =5500 кг/м3, это более чем вдвое превосходит плотность поверхностных слоев Земли, что позволяет предполагать наличие внутри Земли плотного ядра.
Аналогично можно определить массу Солнца: МС ≈ 2⋅1030 кг.
В настоящее время справедливость закона тяготения проверена до самых доступных астрономам расстояний. От действия сил тяготения нельзя экранироваться, силы тяготения не зависят от промежуточной среды.
Силы упругости. Закон Гука
Все реальные тела под действием сил изменяют размеры и форму, т.е. деформируются. Если деформации не слишком велики, то после снятия нагрузки тела почти полностью принимают свои первоначальные размеры и форму. Такие деформации называются упругими.
 Деформации, которые остаются после прекращения действия силы, называются
пластическими.
Деформации, которые остаются после прекращения действия силы, называются
пластическими.
Деформации реального тела всегда пластические, т.к. полностью не исчезают после прекращения действия силы. Однако, если остаточные деформации малы, то ими можно пренебречь.
Наличие сил упругости объясняется тем, что между атомами существует электрическое взаимодействие. Если на тело воздействует внешняя сила и над ним совершается работа, то его потенциальная энергия возрастает (например, пружинка растягивается). Когда действие силы прекращается, система вновь стремиться перейти в состояние с мини- Рис. 5.
мальной энергией.
Введем некоторые понятия, с помощью которых описываются процессы деформации. Для этой цели рассмотрим стержень длиной L и поперечного сечения S (рис.5). К концу стержня приложим силу F. Длина стержня под действием силы измениться на величину ∆L.
Сила, действующая на единицу площади поперечного сечения S, называется напряжением:
σ = F/S.
Количественной мерой, характеризующей степень деформации, является его относительная деформация ε = ∆L/L.
Одно из первых исследований сил упругости было проделано Робертом Гуком: для малых деформаций относительное удлинение и напряжение прямо пропорциональны друг другу: σ ε= E ⋅ .
В этой формуле коэффициент пропорциональности Е называется модулем Юнга.
Закон Гука можно записать в виде, знакомом вам из школьного курса.
∆L σ F ES
![]() ε = = = , или F =
ε = = = , или F = ![]() ∆L =k⋅∆L,
∆L =k⋅∆L,
L E SE L
где k = ES/L называется коэффициентом упругости, а для пружины – коэффициентом жесткости.
Итак, удлинение стержня при упругой деформации пропорционально действующей силе.
Деформация сдвига
Деформацию сдвига можно осуществить, если a
 взять брусок, имеющий форму прямоугольного параллелепипеда, и приложить
к нему силу Fτ , касательную
к его поверхности (рис. 6). Относительная деформация
определяется в этом случае
по формуле a Рис. 6. tgγ=
взять брусок, имеющий форму прямоугольного параллелепипеда, и приложить
к нему силу Fτ , касательную
к его поверхности (рис. 6). Относительная деформация
определяется в этом случае
по формуле a Рис. 6. tgγ= ![]() .
.
b
![]() Тангенциальным напряжением называется величина τ = Fτ
Тангенциальным напряжением называется величина τ = Fτ![]() S
, где S – площадь поверхности бруска. Опыт показывает, что γ=τG
, где G – модуль сдвига.
S
, где S – площадь поверхности бруска. Опыт показывает, что γ=τG
, где G – модуль сдвига.
Силы трения
Всякое тело, движущееся по горизонтальной поверхности другого тела, при отсутствии действия на него со стороны других тел, с течением времени останавливается. В соответствие с законами динамики, это можно объяснить существованием некоторой силы, которая препятствует движению. Эта сила – сила сопротивления, или трения, направленная противоположно относительному перемещению данного тела и приложенная по касательной к соприкасающимся поверхностям.
Различают внешнее (сухое, т.е. трение без смазки) и внутреннее (жидкое или вязкое) трение. Если соприкасающиеся тела неподвижны друг относительно друга, то говорят о трении покоя.
Рассмотрим некоторые закономерности внешнего трения.
Пусть к телу, лежащему на горизонтальной плоскости, приложена горизон-
тальная сила F (рис. 7). Тело придет в движение, ко-
гда приложенная сила будет больше силы трения Fтр. Французские физики Гильом Амонтон (1663 -1705) и Шарль Кулон (1736 – 1806) опытным путем установили следующий закон: сила трения скольжения
пропорциональна силе нормального давления
Fтр = µ⋅N, Рис. 7.
где µ – коэффициент трения скольжения, зависящий от свойств соприкасающихся поверхностей, а N – сила, с которой одно тело давит на другое перпендикулярно плоскости соприкосновения.
Интересно, что трение скольжения не зависит от скорости движения. Оно лишь немного падает с увеличением скорости и колеблется около среднего значения.
Еще одна особенность силы сухого трения: сила трения покоя и сила трения скольжения не зависят от площади соприкасающихся поверхностей.
Как объяснить этот факт? Самые совершенно отполированные поверхности имеют беспорядочно расположенные выступы, высота которых составляет несколько сотен атомных диаметров. Поэтому две прижатые друг к другу поверхности можно схематически изобразить так: молекулярное соприкосновение происходит только в малых, строго локализованных зонах. Общее сечение всех этих зон составляет лишь очень малую часть бруска. Но в этих зонах давления очень высоки. Упроченные зоны обеих тел, там, где они соприкасаются, могут склеиваться посредством адгезии (прилипания).
При повышении нагрузки поперечные сечения вследствие пластической деформации увеличиваются. В результате общее сечение зависит только от силы давления, которая сжимает тела. Сумма площадей всех зон не зависит от площади соприкосновения тел, на которой распределены зоны.
Трение качения
Пусть колесо радиуса r прижато к горизонтальному полотну дороги силой N. Чтобы заставить это колесо катиться с постоянной скоростью, следует приложить силу
Fкач = µкач⋅ ![]() N . r
N . r
Отношение силы трения качения к силе трения скольжения имеет очень малую величину. Понять это можно, рассматривая оба вида трения как обрыв адгезионных связей: при скольжении адгезионные связи на контакте обрываются одновременно, а при качении – последовательно и притом весьма малыми порциями. Попробуйте, например, оторвать липкую ленту от гладкой поверхности стола, прикладывая усилие к одному из ее концов в первом случае горизонтально, вдоль ленты, а во втором – вертикально.
Внутреннее трение или вязкость
Опыт показывает, что сила вязкого трения между двумя слоями жидкости, движущимися параллельно друг другу, определяется выражением
F = η⋅∆υ⋅S,
∆x
где S – площадь каждого слоя, ∆x – их толщина, ∆v – разность скоростей их движения, η – коэффициент вязкости.
Если в жидкости движется тело, то при не очень большой скорости его движения сила вязкого трения пропорциональна этой скорости: F = kv.
Например, для шарика, движущегося с малой скоростью (как оценить степень малости мы обсудим в дальнейшем), сила трения определяется формулой Стокса F = 6π⋅r⋅v.
Особенностью силы вязкого трения является отсутствие силы трения покоя.
Поэтому можно малой силой сдвинуть с места большой корабль в воде.
Мы переходим к рассмотрению законов сохранения. Так же как и принцип относительности, законы сохранения импульса, энергии и ряда других величин выделяются среди всех физических законов своей всеобщностью, т.е. высшей стестепенью фундаментальности.
Своим происхождением законы сохранения обязаны свойствам симметрии природы. Эта идея была впервые сформулирована в 1918 году А.Э. Нётер.
Нётер доказала фундаментальную теорему, носящую теперь её имя. Согласно этой теореме, из инвариантности относительно сдвига во времени (что выражает физическое свойство равноправия всех моментов времени: однородность времени) следует закон сохранения энергии; из инвариантности относительно пространственных сдвигов (свойство равноправия всех точек пространства: однородность пространства) – закон сохранения импульса; из инвариантности относительно пространственного вращения (свойство равноправия всех направлений в пространстве: изотропность пространства) – закон сохранения момента количества движения и другие.
Законы сохранения представляют собой мощное орудие исследования. Часто бывает, что точное решение уравнений движения оказывается весьма сложным. В этих случаях с помощью законов сохранения можно и без решений уравнений движения получить ряд важных данных о протекании процесса. Законы сохранения не зависят от характера действующих сил. Иногда из законов сохранения вытекает, что что-то оказывается невозможным. Мы, например, не тратим попросту время на разработку конструкции вечного двигателя.
Далее мы получим законы сохранения энергии, импульса и момента импульса из законов Ньютона. Однако следует иметь в виду, что законы сохранения обладают гораздо большей общностью, чем законы Ньютона. Законы сохранения являются точными законами, которые выполняются всегда.
Работа. Мощность
Обсуждение законов сохранения начнем с понятия работы, или, точнее говоря, с понятия механической работы.
Пусть на тело действует сила F , а перемещение тела dr . Механической работой называют величину
A = F dr⋅ , равную скалярному произведению силы на перемещение, или
A = F ⋅ dr ⋅ cos α , (4.1) где α – угол между направлением силы и направлением перемещения.
Если тело не перемещается, то работа силы равна нулю. Работа зависит также от угла между силой и перемещением: если 0 < α < π/2, то А > 0, если π/2 <
α < π то A<0. При α = π/2 A=0.
Работа переменной силы
Рассмотрим такой пример. Пусть величина проекции силы на направление движения изменяется во время движения. График проекции силы на направление движения представлен на рис. 8. Для вычисления работы весь путь от S1 до S2 следует разбить на элементарные участки ∆Si, взяв их столь малыми, чтобы за время прохождения каждого из этих участков величину силы можно было считать постоянной. Тогда работа силы на элементарном участке i равна
∆Ai = Fi⋅∆Si,
а работа на всем пути может быть вычислена как
сумма элементарных работ: Fi
A = Σ ∆Ai = Σ Fi⋅∆Si.
При устремлении всех ∆Si к нулю перейдем к точному равенству
S2 S1 ∆Si S2 S
A = ∫ F S dS( ) .
Рис. 8.
S1
Т.е. работа численно равна площади фигуры под кривой F(S).
В качестве примера найдем работу, совершаемую при растяжении пружинки. Растяжение будем производить медленно, чтобы внешнюю силу можно было бы считать равной силе упругости. Тогда
x x 2
kx
A
= ∫ F dx⋅ = ∫kx
dx⋅ = ![]() .
.
0 0 2
Если бы мы растягивали пружинку от координаты x1 до координаты x2, то получили бы другое выражение для работы внешней силы
x2 2 2
![]() ∫ kx2 − kx1
.
∫ kx2 − kx1
.
A = kx dx⋅ =
x1 2 2
Единицы работы
В системе СИ единицей работы является джоуль. Джоуль – это работа, совершаемая силой в 1 Н на расстоянии 1 м : т.к. A = FS, то 1 Дж = 1 Н ⋅ 1 м. В технике часто работа измеряется в килограммометрах: 1 кгм = 1 кгс ⋅ 1 м = 9,81 Дж.
Мощность
На практике часто имеет значение не только величина работы, но и время t, за которое она совершается. Средней мощностью за промежуток времени ∆t называется отношение работы, совершаемой за это время, к промежутку времени:
∆A
Nср
= ![]() .
.
∆t
Мгновенной мощностью называется предел
∆A dA
![]() N
= lim = .
N
= lim = .
∆→t 0 ∆t dt
Мгновенную мощность можно выразить через силу и мгновенную скорость
dA F dS⋅
![]() N
= = = F⋅v. dt dt
N
= = = F⋅v. dt dt
Единицей измерения мощности в системе СИ служит ватт: 1 Вт = 1 Дж/с. Внесистемной единицей мощности является лошадиная сила: 1 л.с. = 75 кг⋅м/с = 749,5 Вт.
Кинетическая энергия.
Допустим, что мы имеем тело, не подвергающееся воздействию со стороны каких либо других тел в некоторой системе координат. Такое тело называется свободным. Пусть начальная его скорость равна v1. Если мы приложим к этому телу постоянную силу F, тело начнет двигаться с постоянным ускорением a. За время t оно пройдет путь S = at2/2 + v1t и приобретет скорость v2 = v1 + a⋅t. Совершенная работа будет равна
at2 at
F⋅S =ma ![]() +υ1t = m⋅at⋅
+υ1t = m⋅at⋅ ![]() +υ1.
+υ1.
2 2
Но at = v2 – v1, поэтому
2 2
![]() υ +υ
mυ
mυ1
υ +υ
mυ
mυ1
![]()
![]() F⋅S = m(v2
– v1)=− .
F⋅S = m(v2
– v1)=− .
2
Итак,
работа силы, действующей на тело,
идет на изменение величины T =mυ2![]() 2
, называемой кинетической энергией:
2
, называемой кинетической энергией:
A = T2 – T1.
Очевидно, единицей кинетической энергии является джоуль.
В общем случае сила и перемещение не параллельны друг другу. В этом случае силу можно разложить на две составляющие: параллельную и перпендикулярную скорости. Работа силы, перпендикулярной скорости, равна нулю согласно уравнению (4.1). Такая сила лишь изменяет направление скорости, но не меняет ее величины, а в выражение кинетический энергии входит модуль скорости.
Потенциальная энергия
Движущееся тело обладает энергией, т.е. может совершить работу. Однако тело может совершить работу и, находясь в особом положении среди других тел. Для того, чтобы охарактеризовать или описать это положение тела, введем ряд новых понятий.
Если тело поставлено в такие условия, что оно подвержено действию других тел с силой, закономерно изменяющейся от точки к точке, то говорят, что тело находится в поле сил. Так, например, тело вблизи поверхности Земли находится в поле сил тяжести – в каждой точке пространства на него действует сила P = m⋅g.
Если в каждой точке пространства действующая сила одинакова по величине и направлению, поле называют однородным.
Два тела, например, Солнце и Земля, взаимодействуют по закону всемирного тяготения
M M1 2
F
= γ
![]() 2 .
2 .
r
Это поле характерно тем, что сила, действующая на Землю в любой точке траектории Земли, проходит через центр Солнца. Поле сил, обладающее таким свойством, называется центральным. Таким же свойством обладает электрическое поле, созданное неподвижным точечным зарядом.
Существуют силы – к их числу относятся упругие, гравитационные, кулоновские – работа которых не зависит от формы траектории. Такие силы называются консервативными (от латинского conservatio – сохранение).
Условились называть потенциальной энергией величину П, зависящую от относительного расположения составных частей системы, уменьшение которой равно положительной работе внутренних сил:
П1 – П2 = А или dA = – dП.
Здесь П1 – начальное, а П2 – конечное значения потенциальной энергии.
Заметим, что понятие потенциальной энергии можно ввести только для поля консервативных сил. Совершенно недопустимо говорить о потенциальной энергии тела, не указывая поле, в котором находится это тело.
Легко доказать, что работа консервативной силы по замкнутой траектории равна нулю. Действительно, если траектория замкнута, то начальная и конечная точки совпадают, и тогда П1 = П2, откуда следует, что A=0.
Заметим еще, что потенциальную энергию можно найти только с точностью до некоторой произвольной постоянной. Т.е. нулевой уровень потенциальной энергии может быть выбран произвольно.
Работа внешней силы по растяжению пружинки A = kx2/2, следовательно, потенциальная энергия пружинки равна П = kx2/2.
 Аналогично может быть найдена
потенци- альная энергия пробного тела в
поле сил тяготения, создаваемых телом массы М.
Аналогично может быть найдена
потенци- альная энергия пробного тела в
поле сил тяготения, создаваемых телом массы М.
Пусть маленькое пробное тело массой m перемещается по произвольному пути между точками 1 и 2 (рис. 9). Работа силы тяготения на элементарном участке dl равна
![]() M m dl⋅ ⋅ ⋅cosα M ⋅ m dr⋅ M
2 dA
=Fdl =γ 2 =γ 2 Рис. 9. r r
M m dl⋅ ⋅ ⋅cosα M ⋅ m dr⋅ M
2 dA
=Fdl =γ 2 =γ 2 Рис. 9. r r
(мы учли, что dl⋅cosα = dr).
Отсюда для работы на полном пути от положения 1 до 2 получается выражение
22 1 1
![]()
![]() Aсил.тяг =γMm∫ dr2 = – γMm =γMm − = m⋅(ϕ1 – ϕ2). (4.2) r r
R R
Aсил.тяг =γMm∫ dr2 = – γMm =γMm − = m⋅(ϕ1 – ϕ2). (4.2) r r
R R
11 1 2
|
Функцию |
|
|
γM ϕ = – r |
(4.3) |
называют потенциалом, создаваемым телом массы М. Из уравнения (4.2) следует, что работа сил поля не зависит от формы пути, она полостью определяется положением начальной и конечной точек.
Работа сил поля не зависит и от постоянной в уравнении (4.3), поэтому ее можно выбрать произвольно. В рассматриваемом случае ее разумно положить равной нулю, т.к. на бесконечности (r →∞ ) тела не взаимодействуют . Тогда выражение для потенциала упростится:
γM
ϕ = – ![]() .
.
r
Закон сохранения энергии
Рассмотрим систему, в которой действуют только консервативные силы. Физическая величина Е, равная сумме кинетической и потенциальной энергии, называется механической энергией системы.
Е = П + Т.
Допустим, что механическая система является замкнутой, это значит, что в ней действуют только внутренние силы. С одной стороны следует, что работа внутренних сил равна изменению кинетической энергии, с другой – изменению потенциальной энергии. Итак,
А = Т2 – Т1 и А = П1 – П2.
Приравнивая правые части этих выражений и сгруппировав члены, получим:
П1 + Т1 = П2 + Т 2.
Следовательно, сумма кинетической и потенциальной энергии, т.е. механическая энергия системы, сохраняется:
Е = Т + П =const.
Мы получили закон сохранения энергии в механике: механическая энергия замкнутой консервативной системы сохраняется.
Введем некоторые понятия, которыми мы будем оперировать:
1. Совокупность тел, рассматриваемых как единое целое, называется механической системой.
2. Внутренние силы – это силы взаимодействия между составными частями системы. Согласно третьему закону Ньютона эти силы попарно параллельны и противоположно направлены, поэтому если произвести векторное сложение всех внутренних сил, то в результате получится нуль.
3. Внешние силы – это силы, приложенные к составным частям системы со стороны тел, не включенных в систему. Если на систему не действуют внешние силы, то систему называют изолированной.
 Рассмотрим систему, состоящую из трех
тел F2
Рассмотрим систему, состоящую из трех
тел F2
(рис. 10). Запишем основное уравнение динамики для каждого тела.
![]() dp1
= f12 + f13 + F1, dt
dp1
= f12 + f13 + F1, dt
![]() dp2
= f21 + f23 + F2, dt
dp2
= f21 + f23 + F2, dt
![]() dp3
= f31 + f32 + F3, Рис. 10. 3
dt
dp3
= f31 + f32 + F3, Рис. 10. 3
dt
где fij – внутренние, а Fi – внешние силы. Складывая почленно эти уравнения, получим: d
![]() (
p1
+ p2
+ p3)
= F1
+ F2
+ F3, dt
(
p1
+ p2
+ p3)
= F1
+ F2
+ F3, dt
dp
![]() = F1
+ F2
+ F3. dt
= F1
+ F2
+ F3. dt
Мы учли, что сумма внутренних сил в соответствии с третьим законом Ньютона равна нулю. Если система изолирована, то все внешние силы равны нулю. Тогда
dp
![]() = 0. dt
= 0. dt
Иначе говоря, p = const.
Итак, импульс замкнутой системы остается величиной постоянной, т.е.
не изменяется с течением времени.
Абсолютно неупругий удар
Удар называется абсолютно неупругим, если после соударения двух тел они движутся с одинаковой скоростью, образуя одно тело. Примером может служить удар пластилинового шарика о другой такой же шарик.
Рассмотрим два шара массами m1 и m2, центры которых движутся вдоль одной прямой (рис. 11). Пусть в некоторый момент времени происходит удар этих шаров, называемый в нашем случае центральным ударом. При этом шары деформируются, кинетическая энергия частично или полностью превращается во внутреннюю энергию. При абсолютно неупругом ударе выполняется только закон сохранения импульса, закон же сохранения механической
энергии не выполняется. До удара
![]() Пусть скорости шаров до удара
равны v1
и v2.
Им- υ1
υ2 пульс после удара должен равняться импульсу до удара:
Пусть скорости шаров до удара
равны v1
и v2.
Им- υ1
υ2 пульс после удара должен равняться импульсу до удара:
m1⋅v1 + m2⋅v2 = (m1 + m2) u, После удара u
где u
– скорость шаров после удара. Отсюда ![]() m1 ⋅υ1 +
m2 ⋅υ2 u =
m1 ⋅υ1 +
m2 ⋅υ2 u = ![]() 1 +m2 . Рис. 11.
1 +m2 . Рис. 11.
m
При абсолютно неупругом ударе произойдет потеря механической энергии, которая переходит в тепло. Она равна разности механической энергии до и после удара:
![]()
![]() mυ
υ12 m2
22 (m1 +
m
u2)
22
mυ
υ12 m2
22 (m1 +
m
u2)
22
∆E =+ − .
2 2
Подставляя в это выражение скорость шаров после удара, находим:
![]() m m1 ⋅
2(υ
υ1
−
2)2
m m1 ⋅
2(υ
υ1
−
2)2
∆E = .
2(m1 +m2)
Абсолютно упругий удар
Удар называется абсолютно упругим, когда сохраняется вся механическая энергия.
Обозначим массы шаров через m1 и m2, скорости их до удара через v1 и v2, а после удара – через u1 и u2 (рис. 12). Так как удар центральный, а движение одномерное, то законы сохранения энергии и импульса (в проекции на ось х) будут иметь вид:
![]() m1⋅v1 + m2⋅v2 = m1⋅u1 + m2⋅u2 , До удара mυ2 m2
2υ2 m1u12 m1u22
m1⋅v1 + m2⋅v2 = m1⋅u1 + m2⋅u2 , До удара mυ2 m2
2υ2 m1u12 m1u22
![]() + = + . υ1 υ2
+ = + . υ1 υ2
2 2 2 ![]()
![]()
Перенеся члены, относящиеся к m1, влево, а к m2 –
![]() вправо и сокращая
на 2, получим систему уравне- После удара u1 u2 ний:
вправо и сокращая
на 2, получим систему уравне- После удара u1 u2 ний:
m1(v12 – u12) = m2(u22 – v22),
m1(v1 – u1) = m2(u2 – v2). Рис. 12. (5.1)
Разделив почленно первое уравнение на второе, получаем:
v1 + u1 = u2 + v2 . (5.2)
Мы освобождаемся, таким образом, от квадратов в уравнениях. Решая совместно
(5.1) и (5.2), находим:
2mυ +(m −m )υ
|
u1 = |
(5.3) |
|
2mυ
+(m
−m
)υ
u2 = |
(5.4) |
m1 + m2
Если шары имеют одинаковую массу (m1 = m2), то из (5.3) и (5.4) получим u1 = v2, u2 = v1.
Т.е. при упругом центральном ударе двух тел одинаковой массы они обмениваются скоростями.
Если одно из двух тел очень массивно (например, второе: m2>>m1), то на основании полученных формул получим: u1 ≅ – v1 + 2 v2 , u2 ≅ v2.
Как видим, скорость массивного тела фактически не изменяется.
Реактивное движение
Движение ракеты также объясняется законом сохранения импульса. При сгорании топлива из сопла с большой скоростью вырываются газы, в результате чего ракета движется в противоположном направлении так, что сумма импульсов ракеты и газов остается постоянной величиной.
Пусть в некоторый момент времени t0 масса ракеты (вместе с горючим и окислителем) равна М, а скорость ее относительно Земли v. При сгорании некоторого количества топлива ракета к моменту времени t1 = t0 + ∆t будет иметь массу М – ∆m и скорость относительно Земли v + ∆v. Скорость истечения газов относительно ракеты равна u и направлена в сторону, противоположную движению ракеты. Тогда скорость газов относительно Земли в момент t1 равна разности скорости ракеты и скорости истечения газов:
vгаз = v + ∆v – u.
Поскольку система «ракета и газы» является замкнутой, то к ней применим закон сохранения импульса:
M⋅v = (M – ∆m)⋅(v +∆v) + ∆m(v + ∆v – u).
Раскрыв скобки и сделав соответствующие преобразования, получим
M⋅∆v = ∆m⋅u. (5.5)
![]()
![]() Газы,
вырываясь из сопла ракеты, действуют на нее
с некоторой силой, которая называется реактивной тягой. Чтобы найти ее, разделим
обе части равенства на ∆t. Учитывая,
что M⋅∆
∆υt = F представляет собой силу тяги, а µ =∆
∆mt
– ежесекундный расход топлива, получим F = – µ⋅u.
Газы,
вырываясь из сопла ракеты, действуют на нее
с некоторой силой, которая называется реактивной тягой. Чтобы найти ее, разделим
обе части равенства на ∆t. Учитывая,
что M⋅∆
∆υt = F представляет собой силу тяги, а µ =∆
∆mt
– ежесекундный расход топлива, получим F = – µ⋅u.
Итак, реактивная сила тяги равна произведению расхода топлива и скорости истечения газов. Она направлена в сторону, противоположную направлению истечения газов.
Далее, т.к. ∆M = – ∆m, из (5.5) получим
M⋅ ![]() dυ = – u⋅
dυ = – u⋅ ![]() dM
. dt dt
dM
. dt dt
Разделив переменные и проинтегрировав, найдем:
v = –u⋅∫ ![]() dM = – u⋅ln М + C.
dM = – u⋅ln М + C.
M
Значение постоянной С определим из начальных условий. Если в начальный момент времени скорость ракеты равна нулю, а ее масса М0, то С = u⋅ln M0.
Следовательно, v = u⋅ln ![]() M0
.
M0
.
M
Это выражение называется формулой Циолковского.
До сих пор мы рассматривали движение материальной точки. Далее мы будем рассматривать движение абсолютно твердого (недеформируемого) тела. Известно, что если заметных деформаций тела не происходит, то его любое сложное движение может быть представлено суммой вращательного и поступательного движения.
Поступательным называется такое движение, при котором прямая, проведенная через две любые точки тела, остается параллельной сама себе. Следовательно, все точки тела описывают в пространстве одинаковые траектории, и движение полностью задается любой точкой (например, центром масс тела).
Вращательное движение вокруг оси – это такое движение твердого тела, при котором траектория любой его точки является окружностью. Центры всех окружностей лежат на одной прямой, называемой осью вращения.
Рассмотрим подробнее вращательное движение твердого тела. Мы ограни-
чимся рассмотрением вращения тела вокруг одной оси. Ось может быть неподвижна, как, например, ось ротора электродвигателя; возможно перемещение оси в пространстве, например, ось, называемая мгновенной, вращения колеса, катящегося по шоссе, которая в каждый момент совпадает с линией соприкосновения колеса с шоссе. Тело, вращающееся вокруг оси, имеет одну степень свободы и его положение однозначно определяется углом поворота ϕ.
![]() Основными кинематическими характеристиками вращательного движения являются его угловая
скорость ω и угловое
ускорение β. Для любой
точки, отстоящей от оси
на расстояние r, ее линейная скорость υ = ω⋅r, касательное
ускорение a = β⋅r, нормальное
ускорение an = ω2⋅r и
полное ускорение a = r⋅ β2 +ω4 .
Основными кинематическими характеристиками вращательного движения являются его угловая
скорость ω и угловое
ускорение β. Для любой
точки, отстоящей от оси
на расстояние r, ее линейная скорость υ = ω⋅r, касательное
ускорение a = β⋅r, нормальное
ускорение an = ω2⋅r и
полное ускорение a = r⋅ β2 +ω4 .
Обобщая результаты наблюдений, можно заключить, что тело, вращающееся вокруг оси, проходящей через центр масс, если на него не действуют другие тела (например, нет трения об ось), должно сохранять вращение сколь угодно долго. Это заключение аналогично первому закону Ньютона для поступательного движения. Далее получим для вращательного движения закон, аналогичный второму закону Ньютона.
Момент силы и момент инерции
|
ное ускорение aτ , определяемое равенством: |
. 13. |
|
|
f = m⋅aτ . |
|
(6.1) |
 При рассмотрении вращения твердого тела понятие
о силах заменяется понятием о моментах
сил, а понятие о массе
– понятием о моменте инерции. Для того
чтобы выяснить содержание этих понятий,
рассмотрим вначале вращение одной материальной точки А с
массой m по окружности радиуса r (рис. 13). Пусть на точку
А действует постоянная сила f, направленная по
касательной к окружности. Тогда точка А приобретает постоянное тангенциаль-
Рис
При рассмотрении вращения твердого тела понятие
о силах заменяется понятием о моментах
сил, а понятие о массе
– понятием о моменте инерции. Для того
чтобы выяснить содержание этих понятий,
рассмотрим вначале вращение одной материальной точки А с
массой m по окружности радиуса r (рис. 13). Пусть на точку
А действует постоянная сила f, направленная по
касательной к окружности. Тогда точка А приобретает постоянное тангенциаль-
Рис
а
Введем угловое ускорение β = τ . Тогда равенство (6.1) заменится выражением r
f = m⋅r⋅β . (6.2)
Умножив правую и левую части этого уравнения на r, получим f⋅r = m⋅r2⋅β .
Величина М = f⋅r, численно равная произведению величины силы на длину перпендикуляра, опущенного на направление силы из точки О (центра вращения), называется моментом силы относительно точки О.
Величина I = m⋅r2, численно равная произведению массы точки на квадрат расстояния от оси вращения, называется моментом инерции точки относительно оси.
Введя понятия момента силы и момента инерции, можно представить уравнение (6.2) в виде М = I⋅β.
Перейдем теперь к рассмотрению твердого тела, вращающегося вокруг оси ОО' (рис. 14). Разобьем тело на большое число весьма малых элементов с массами ∆mi . Пусть расстояние от одного из таких элементов до оси вращения равно ri, а сила, действующая на него, равна Fi . Раскладывая вектор Fi на три составляющих, как показано на рисунке, мы видим, что только сила fi влияет на движение выбранного элемента. Для этого элемента запишем уравнение fi = ∆mi⋅ai , или fi = ∆mi⋅ri⋅β, или, домножив на ri , fi ri = ∆mi⋅ri2⋅β.
 Такие же
равенства мы можем записать для всех
остальных элементов, а затем
просуммировать их:
Такие же
равенства мы можем записать для всех
остальных элементов, а затем
просуммировать их:
Σ fi ri = Σ ∆mi⋅ri2⋅β.
Величина I = Σ ∆mi⋅ri2 представляет собой момент инерции тела относительно оси ОО'.
Величина M = Σ fi⋅ri является полным моментом сил, действующих на тело, относительно оси вращения ОО'. Момент сил можно представить в виде вектора, если определить его как M = ∑[ri × fi ].
Т.к. угловое ускорение тоже является вектором, то, используя эти понятия, равенство (6.3) можно переписать так:
dω
M
= Iβ= I ![]() . (6.4)
. (6.4)
dt
Если момент инерции не изменяется, то d(Iω) dL
![]() M
= = , (6.5) dt dt
M
= = , (6.5) dt dt
где L = Iω носит название момента импульса.
Уравнения (6.4)-(6.5) аналогичны уравнениям (2.1)-(2.2). Роль массы играет момент инерции, роль линейного ускорения – угловое ускорение, роль силы – суммарный момент внешних сил. Иногда его называют вторым законом Ньютона для вращательного движения.
Моменты инерции некоторых тел
Как следует из определения (6.6) момент инерции тела – аддитивная величина, то есть момент инерции тела, состоящего из нескольких частей, относительно некоторой оси равен сумме моментов инерции этих частей относительно той же оси. Разбив тело на маленькие части массами ∆mi , для его момента инерции получим:
I= Σ∆mi⋅ri2, где⋅ri – расстояния от i-й точки до оси вращения. Введя понятие плотности
ρi=∆mi /∆Vi, можно преобразовать формулу для момента инерции тела
I = Σρi ri2⋅∆Vi
Перейдем к пределу при ∆Vi → 0, тогда суммирование заменится интегрированием
I = ∫ ρ⋅r dV2 .
{Vтела}
Момент инерции тонкостенного полого цилиндра
Разобьем цилиндр на полоски, идущие па- раллельно его оси (рис. 15). Ввиду малой толщины
 стенок цилиндра мы можем
считать, что все части
O'
стенок цилиндра мы можем
считать, что все части
O'
такой полоски лежат на одинаковых расстояниях от оси ОО'. Поэтому момент инерции одной такой полоски равен
∆I = ∆mi⋅R2, где ∆mi – масса полоски. Момент инерции всего тонкостенного полого цилиндра Рис. 15.
I = Σ∆mi⋅R2 = R2⋅Σ∆mi .
Но Σ∆mi есть масса всего цилиндра, поэтому I = m⋅R2.
Относительно какой-либо другой оси момент инерции того же цилиндра будет иным.
Mомент инерции однородного диска. b
![]() Разобьем диск на
кольцевые слои толщиной dr (рис. 16). Все точки одного слоя будут
находиться на одинаковом расстоянии от оси,
равном r. Объем такого слоя равен
dV = 2π⋅b⋅r⋅dr, где b – толщина диска.
Подставим значение для элемента
объема в интеграл R R 4
Разобьем диск на
кольцевые слои толщиной dr (рис. 16). Все точки одного слоя будут
находиться на одинаковом расстоянии от оси,
равном r. Объем такого слоя равен
dV = 2π⋅b⋅r⋅dr, где b – толщина диска.
Подставим значение для элемента
объема в интеграл R R 4
2πbρR
I = dV
=ρ π∫2
br dr = ![]() , 3
, 3
0 4
где R – радиус диска. Т.к. масса диска m = ρ⋅π⋅b⋅R2, то
1
![]() ⋅R2.
⋅R2.
I = m
2
Кинетическая энергия вращающегося твердого тела
![]() Кинетическая энергия вращающегося твердого тела представляет
собой алгебраическую сумму кинетических энергий отдельных его элементов, т.е.
Кинетическая энергия вращающегося твердого тела представляет
собой алгебраическую сумму кинетических энергий отдельных его элементов, т.е.
2 2
Eкин=
![]() 1 ∑∆miυi2 =
1 ∑∆miυi2 = ![]() 1 ∑∆m ri
i2ω2 =ω
1 ∑∆m ri
i2ω2 =ω![]() ∑∆miri2 =
∑∆miri2 = ![]() Iω .
Iω .
2 2 2 2
Найдем работу внешней силы при повороте тела на угол ∆ϕ. Пусть к телу приложена сила F . Величина момента этой силы относительно оси вращения есть М =
F⋅r⋅sinα, где α – угол между векторами r и F (см. рис. Рис. 17. 17). При повороте тела на угол ∆ϕ точка приложения силы переместится на длину дуги ∆S, откуда работа, совершенная силой F, будет равна ∆А = F⋅∆S⋅cos(α − π/2) = F⋅∆S⋅sin α .
Но ∆S = r⋅∆ϕ. Поэтому ∆А = F⋅∆ϕ⋅r⋅sin α. Или, так как F⋅r⋅sin α = М, ∆А = М⋅∆ϕ.
В случае, когда момент М постоянен, то работа, совершаемая при повороте тела на угол ϕ, будет А = М⋅ϕ.
Если тело движется поступательно со скоростью v и одновременно вращается вокруг некоторой оси с угловой скоростью ω, то полная кинетическая энергия его равна
mυ2 Iω2
![]() T
= +
.
T
= +
.
2 2
Теорема Штейнера
Если для какого-либо тела известен момент инерции относительно оси, проходящей через центр тяжести, то легко может быть найден момент инерции относительно оси, параллельной данной. Определение этого момента производится по теореме Штейнера:
Момент инерции тела I относительно произвольной оси равен сумме момента инерции I0 относительно оси, параллельной данной и проходящей через центр инерции тела, и произведения массы этого тела на квадрат расстояния между осями:
I = I0 + m⋅a2.
Докажем эту теорему.
Если тело вращается вокруг оси, не проходящей через центр масс, то его кинетическая энергия может быть найдена по формуле: 2 2 mυ I0ω
![]() Екин = + .
Екин = + .
2 2
Здесь I0 – момент инерции тела относительно оси, проходящей через центр масс; v – скорость движения оси, проходящей через центр масс тела. Эта скорость равна v = ω⋅a, где a – расстояние от оси вращения до оси, проходящей через центр масс. С учетом этого
![]() Екин = mω2a2 + I0ω2 = (I0 + ma2 )ω2 = Iω2 ,
Екин = mω2a2 + I0ω2 = (I0 + ma2 )ω2 = Iω2 ,
2 2 2 2
откуда I = I0 + m⋅a2.
Закон сохранения момента импульса
Основной закон динамики вращательного движения можно преобразовать так:
M = I⋅β = I⋅ ![]() ∆ω, или M⋅∆t = I⋅∆ω.
∆ω, или M⋅∆t = I⋅∆ω.
∆t
Пусть момент инерции твердого тела относительно данной оси величина постоянная, тогда
M⋅∆t = ∆(I⋅ω).
Величина М⋅∆t называется импульсом момента сил, а величина L = I⋅ω – моментом импульса тела. Равенство означает, что изменение момента импульса тела равно импульсу момента сил приложенному к телу. Если M = 0, то ∆(I⋅ω) = 0, откуда L = I⋅ω = const.
Итак, если момент внешних сил равен нулю (например, в замкнутой системе), то момент импульса тела остается постоянным. Это утверждение называется законом сохранения момента импульса тела.
Гироскопы
Гироскопом (или волчком) называется массивное симметричное тело, вращающееся с большой скоростью вокруг оси симметрии. Эту ось называют осью гироскопа.
![]() Если к вращающемуся
гироскопу приложить пару сил,
стремящуюся повернуть его около
оси, перпендикулярной к оси
его вращения, то он
станет поворачиваться около третей оси, перпендикулярной к
первым двум. Пусть, например, гироскоп вращается около оси ОО' в направлении,
указанном стрелкой, а пара
сил F1 и F2, перпендикулярных плоскости ри- A сунка, стремятся повернуть его около
оси АА' (рис.
18). Гироскоп, однако, повернется вокруг оси ВВ'. Странное поведение гироскопа полностью соответствует законам динамики вращательного движения.
Если к вращающемуся
гироскопу приложить пару сил,
стремящуюся повернуть его около
оси, перпендикулярной к оси
его вращения, то он
станет поворачиваться около третей оси, перпендикулярной к
первым двум. Пусть, например, гироскоп вращается около оси ОО' в направлении,
указанном стрелкой, а пара
сил F1 и F2, перпендикулярных плоскости ри- A сунка, стремятся повернуть его около
оси АА' (рис.
18). Гироскоп, однако, повернется вокруг оси ВВ'. Странное поведение гироскопа полностью соответствует законам динамики вращательного движения.
В самом деле, момент сил M направлен вдоль прямой АА'. Согласно уравнению (6.5), за время dt
момент импульса гироскопа L получит приращение dL = M ⋅ dt, которое имеет такое же направление, как и M . Спустя время dt момент импульса гироскопа будет равен результирующей L1 = L+dL , лежащей в плоскости рисунка. Направление L1 совпадает с новым направлением оси гироскопа. Таким образом, ось гироcкопа повернется вокруг оси ВВ' на некоторый угол dϕ.
Найдем скорость этого углового поворота Ω = dϕ / dt. Т.к. dϕ = dL/L =
Mdt/L, то отсюда следует, что поворот гироскопа происходит с угловой скоростью Ω = M/L.
В результате гироскопического эффекта гироскоп стремится расположить ось своего вращения таким образом, чтобы она образовала возможно меньший угол с осью вынужденного вращения, и чтобы оба вращения совершались в одном направлении.
![]() Законы Ньютона справедливы в инерциальных
системах отсчета. Выполняются ли они
в системах, движущихся ускоренно?
Законы Ньютона справедливы в инерциальных
системах отсчета. Выполняются ли они
в системах, движущихся ускоренно?
Представим себе длинный вагон, вдоль которого протянут горизонтальный стержень (рис. 19). Вдоль стержня может без трения скользить шар с отверстием. Будем считать систему, связанную с Зем-
Рис. 19. лей, инерциальной. Пусть вагон начал движение относительно Земли с постоян-
ным ускорением a0. Рассмотрим, как явления, происходящие в вагоне, описывают наблюдатели, находящиеся в различных системах координат. Систему, связанную с Землей, мы обозначим через XYZ, а систему, связанную с движущимся вагоном, – через X'Y'Z'.
Наблюдатель в системе XYZ. Он видит, что на шар никакие силы не действуют, и в соответствии с первым законом Ньютона его скорость не меняется, т.е. относительно Земли он движется без ускорения, а в нашем примере покоится. Но вагон движется относительно Земли с ускорением a0, и поэтому относительно вагона шар движется с ускорением –a0.
Наблюдатель в вагоне, т.е. в системе X'Y'Z'. Хоть на шар никакие силы и не действуют, однако он имеет ускорение относительно вагона! Значит, в системе X'Y'Z' закон инерции нарушен: здесь возникает ускорение, не вызванное силами.
Итак, в ускоренно движущейся системе отсчета нарушается закон инерции.
Поэтому такая система является неинерциальной.
Силы инерции и принцип Даламбера
Законы Ньютона в неинерциальных системах отсчета не выполняются. Однако можно сформулировать правило, позволяющее формально пользоваться вторым законом Ньютона и в неинерциальных системах отсчета. При этом, однако, будет необходимо отказаться от первого и третьего законов Ньютона.
В неинерциальных системах координат вводят дополнительные силы, которые носят название сил инерции.
Вернемся к анализу явлений, происходящих в вагоне при его ускоренном движении. В первом опыте, когда шар не взаимодействовал с другими телами, он все же двигался относительно вагона с ускорением –a0. Таким образом, шар вел себя так, как если бы в вагоне на него действовала некая сила FI = –ma0, которая и сообщала ему ускорение.
Величина FI = −ma0, где a0 – ускорение неинерциальной системы отсчета, называется силой инерции.
Пользуясь этим понятием, можно записать основное уравнение динамики в системе движущейся с ускорением, следующим образом:
F + FI = m a⋅ .
Эта формула является математическим выражение принципа Даламбера:
Векторная сумма всех сил взаимодействия и сил инерции равна произведению массы тела на его ускорение относительно неинерциальной системы отсчета.
Равномерно вращающаяся система отсчета. Центробежная сила
Перейдем к рассмотрению событий, происходящих во вращающейся системе отсчета.
Поставим на горизонтально расположенный диск маятник и приведем диск во вращение вокруг вертикальной оси OO' (рис. 20). Маятник отклонится от вертикали.
![]() Рассмотрим его поведение
с точки зрения наблюдателя, находящегося в неподвижной
системе координат, связанной с Землей.
Так как маятник движется по окружности,
то должна существовать сила F , постоянно
заворачивающая его, т.е.
сообщающая ему центростремительное ускорение. Этой силой является векторная сумма силы
Рассмотрим его поведение
с точки зрения наблюдателя, находящегося в неподвижной
системе координат, связанной с Землей.
Так как маятник движется по окружности,
то должна существовать сила F , постоянно
заворачивающая его, т.е.
сообщающая ему центростремительное ускорение. Этой силой является векторная сумма силы
тяжести и натяжения нити mg
F =T + mg= maц= –mω2ρ, Рис. 20. где ρ – радиус-вектор, проведенный от оси вращения до тела.
Как видно из рисунка, тангенс угла отклонения маятника равен
F ω2ρ
![]() tgα = = , mg g
tgα = = , mg g
т.е. чем дальше от оси (чем больше ρ), тем на больший угол отклоняется маятник. Если ρ = 0, то он не отклоняется совсем.
Рассмотрим поведение того же маятника с точки зрения наблюдателя, находящегося на диске. В этой системе маятник покоится. Чтобы сохранить закон Ньютона, мы должны ввести силу инерции Fцб, удовлетворяющую условию:
T + mg+Fцб = 0,
![]() откуда получим
откуда получим
Fцб = –(T + mg ) = –F = m ω2ρ.
Эту силу принято называть центробежной силой инерции.
Движение во вращающейся системе отсчета. Сила Кориолиса
Если тело перемещается во вращающейся системе координат, то для описания его движения в Рис. 21. подвижной системе координат нужно ввести еще одну силу инерции, называемую силой Кориолиса.
Над диском вдоль его радиуса укрепим неподвижную линейку (рис. 21). Линейка играет роль неподвижной системы отсчета, связанной с Землей.
Проведем мелом линию из центра вдоль линейки со скоростью u. Если диск не вращается, то мел оставит след в виде прямой линии OA вдоль его радиуса.
При вращении диска c угловой скоростью ω мел опишет из центра криволинейную траекторию OB.
Рассмотрим это явление из разных систем отсчета.
Неподвижная система отсчета, связанная с Землей. В этой системе, пока мел движется по прямой вдоль радиуса со скоростью u, диск успевает повернуться на угол ∆ϕ = ω∆t, и поэтому мел попадает в точку B. Длина дуги АB равна ∆S = R∆ϕ = uω⋅(∆t)2.
Подвижная система. В этой системе мел движется по криволинейной траектории, а значит, на него действует сила, перпендикулярная радиусу. Мел отклоняется от прямолинейной траектории на ∆S = АB. Ускорение, сообщенное этой силой, есть
2∆S
aкор = ![]() 2
= 2uω.
2
= 2uω.
∆t
Это ускорение перпендикулярно векторам ω и u .
Можно показать, что при произвольном направлении скорости u получилось бы ускорение aкор = 2⋅[u ×ω],
которое называется ускорением Кориолиса. Чтобы тело с массой m двигалось с таким ускорением, на него должна действовать сила fкор = maкор = 2m⋅[u ×ω], называемая силой Кориолиса.
Колебания представляют один из наиболее распространенных видов движений в природе. Можно привести множество примеров: вибрации машин, колебания струн и мембран, тепловое движение атомов в узлах кристаллической решетки.
Некоторые колебательные движения могут привести к катастрофическим последствиям, например колебания моста, возникающие от толчков, сообщаемых ему колесами поезда на стыках рельсов. В таких случаях задача состоит в том, чтобы предотвратить такие последствия. С другой стороны, колебательные процессы лежат в основе различных областей техники, например, в радиотехнике.
Наиболее общими признаками колебательного движения является их повторяемость и движение в ограниченном пространстве. Можно дать такое определение колебаниям:
Колебания – это движение (процесс), при котором состояние системы точно или приблизительно повторяется во времени.
Если движение или процесс повторяется через определенные промежутки времени Т, то колебание называется периодическим, а время Т – периодом колебаний. Число повторений движения или процесса в единицу времени ν называется частотой колебаний. Очевидно, что ν = 1/T. Единицей частоты служит 1 Герц (Гц) – частота колебаний, которые совершаются 1 раз в одну секунду.
Гармонические колебания
Важнейшим примером среди периодических колебаний являются простые, или гармонические, колебания. Оказывается, что все прочие колебания можно представить как результат наложения некоторого числа гармонических колебаний разных частот, называемых гармониками. Математически эта возможность выражается разложением функции в ряд Фурье.
Гармонические колебания представляют собой периодический процесс, в котором изменение величины происходит по закону синуса или косинуса.
Для гармонического колебания величина удаления от положения равновесия является синусоидальной функцией времени x = A·sin(ω0t + ϕ0),
где x – элонгация, или величина удаления от положения равновесия;
А – величина максимального удаления от положения равновесия, называемая амплитудой гармонического колебания;
ω0t + ϕ0 – фаза гармонического колебания; ϕ0 – начальная фаза гармонического колебания; ω0 – циклическая частота.
Циклическая, или круговая, частота связана с периодом соотношением ω =2π/T.
Скорость и ускорение при гармоническом колебании находятся как первая и вторая производные от элонгации по времени:
![]() v =
v = ![]() dx = ω0
A cos(ω0t + ϕ0) = ω0
A sin(ω0t + ϕ0
+ π
dx = ω0
A cos(ω0t + ϕ0) = ω0
A sin(ω0t + ϕ0
+ π![]() ); dt 2
a = d22x = dυ = – ω2 A sin(ω0t + ϕ0).
); dt 2
a = d22x = dυ = – ω2 A sin(ω0t + ϕ0).
0
dt dt
Из последнего выражения видно, что величина ускорения "колеблется" в противофазе с элонгацией: d[1]x 2
Динамика гармонического колебания
Соотношение (8.1) между ускорением и элонгацией позволяет определить условие, которому должна удовлетворять сила, чтобы под ее воздействием материальная точка совершала гармонические колебания. Действительно, по второму закону Ньютона
F = –m a = – m⋅ω02x. (8.2)
Это значит, что для поддержания гармонического колебания нужна сила, которая изменялась бы пропорционально –x, т.е. пропорционально величине отклонения колеблющейся точки от положения равновесия. Знак "минус" указывает, что сила должна быть направлена против отклонения x, т.е. направлена к положению равновесия. Кроме того, при x = 0 сила не действует: F = 0. Таким условиям удовлетворяет сила, возникающая при деформации пружины:
F = – kx. (8.3)
Сравнивая это с выражением (8.2), найдем:
![]()
![]()
![]() k = mω02, ω0 = , ν = ω0 = 1 k и T =
k = mω02, ω0 = , ν = ω0 = 1 k и T = ![]() 1 = 2π .
1 = 2π .
2π 2π m ν
Таким образом, значение массы колеблющейся материальной точки и величина коэффициента упругой силы однозначно определяют частоту и период гармонического колебания.
Если сила не является по своей природе упругой, но подчиняется закону (8.3), то она называется квазиупругой силой (по латыни quasi означает «как бы»).
Маятники
Математический маятник l sin(α)
![]() Математическим маятником называют идеализированную систему, состоящую из невесомой и нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной точке.
Математическим маятником называют идеализированную систему, состоящую из невесомой и нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной точке.
Достаточно хорошим приближением к математическому маятнику служит тяжелый шарик, подвешенный на тонкой длинной нити.
теризовать углом α, образованным нитью с вертикалью (рис. 22). Рис. 22. При отклонении маятника от положения равновесия возникает вращательный момент М, равный по величине mgl·sin(α). Этот момент стремится вернуть маятник к положению равновесия, т.е. аналогичен квазиупругой силе, поэтому моменту М и угловому смещению α нужно приписывать разные знаки.
Следовательно, M = – mgl·sinα.
![]() Т.к.
момент инерции маятника равен I = ml2, а угловое
ускорение β =d2α
αdt2
≡ , то уравнение динамики вращательного движения M = Iβ для нашего
маятника выглядит так:
Т.к.
момент инерции маятника равен I = ml2, а угловое
ускорение β =d2α
αdt2
≡ , то уравнение динамики вращательного движения M = Iβ для нашего
маятника выглядит так:
ml2α= – mgl sinα.
Ограничимся рассмотрением малых колебаний. В этом случае sinα α≈ . Введя, кроме того, обозначение g/l = ω02, придем к выражению α + ω02α = 0, которое подобно уравнению (8.1), полученному ранее. Его решение имеет вид α = α0 сos(ω0t + ϕ).
Следовательно, при малых колебаниях угловое отклонение математического маятника изменяется во времени по гармоническому закону. Угловая частота равна
ω0 = ![]() , а период Т = 2π
, а период Т = 2π ![]() .
(8.4)
.
(8.4)
Физический маятник
![]() Рассмотрим теперь колебания физического маятника, которым может служить любое твердое тело (рис.
23), способное свободно вращаться вокруг неподвижной горизонтальной оси, не
проходящей через центр масс. Момент внешних
сил относительно этой оси
равен
Рассмотрим теперь колебания физического маятника, которым может служить любое твердое тело (рис.
23), способное свободно вращаться вокруг неподвижной горизонтальной оси, не
проходящей через центр масс. Момент внешних
сил относительно этой оси
равен
M = – mgl0 sinα, где m – масса физического маятника, l0 – расстояние от оси вращения до центра масс. Знак "минус" означает, что момент М препятствует повороту на угол α. При малых углах поворота sinα ≈ α. Обозначив момент инерции маятника относительно оси, проходящей через точку подвеса, через I, можно написать
Iα= – mgl0α или α + ω02α = 0, где ω02 = mgl0/I. Рис. 23
Из уравнения движения маятника видно, что при малых отклонениях от положения равновесия физический маятник совершает гармонические колебания, частота которых зависит от массы маятника, момента инерции маятника относительно оси вращения и расстояния между осью вращения и центром инерции маятника. Период колебаний маятника определяется выражением
![]() I
I
T = 2π . (8.5)
Из сопоставления формул (8.4) и (8.5) видно, что математический маятник длиной
I
lпр
= ![]()
ml0
будет иметь такой же период колебаний, как и данный физический маятник. Величину I/(ml0) называют приведенной длиной физического маятника.
Затухающие колебания
Если помимо квазиупругой силы на колеблющуюся точку действует сила трения, то она приводит к уменьшению механической энергии системы.
Рассмотрим груз, колеблющийся на пружинке. Выведем его из положения равновесия и отпустим. На тело будут действовать упругая сила Fупр = –kx и сила трения Fтр. Будем считать, что сила трения пропорциональна скорости: Fтр = –µυ (знак минус указывает на то, что сила трения направлена противоположно скорости). Тогда уравнение движения груза (второй закон Ньютона) запишется так:
![]() –kx – µυ = ma, или,
т.к. υ =x, a a =x, µ k
x+ x+ x = 0. m m
–kx – µυ = ma, или,
т.к. υ =x, a a =x, µ k
x+ x+ x = 0. m m
Вводя обозначения
![]() µ= 2β,
µ= 2β, ![]() k = ω02, можно записать m m
k = ω02, можно записать m m
x+ 2β⋅x+ ω02x = 0.
Это однородное линейное дифференциальное уравнение второго порядка с постоянными коэффициентами. Его решение имеет вид
x = a0 e–β t cos(ω1t + ϕ), (8.6)
где ω1 – частота колебаний, определяемая выражением ω12 = ω02 – β 2.
Движение тела можно рассматривать как гармоническое колебание частоты ω с амплитудой, меняющейся по закону x a e= 0 −βt . Степень затухания колебаний
определяется величиной β = ![]() µ ,
µ ,
2m
которую называют коэффициентом затухания.
Найдем время τ, за которое амплитуда уменьшается в е раз. Т.к. a0e–βτ = a0e–1, получим βτ = 1. Следовательно, коэффициент затухания обратен по величине тому промежутку времени τ, за которое амплитуда уменьшается в е раз, т.е. β = 1/τ. Найдем число колебаний Ne, которое совершит система за время τ : τ 1 1
![]() Ne = = =
.
Ne = = =
.
T βT λ
Для характеристики колебательной системы часто употребляется величина
Q =![]() =
π Ne,
=
π Ne,
называемая добротностью колебательной системы. Как видно, добротность пропорциональна числу колебаний за время, в течение которого амплитуда уменьшается в е раз.
Последовательные максимальные отклонения тела от положения равновесия будут наступать через равные промежутки времени Т = 2π /ω1. Если первый из них равен x0, то второй будет x0 e–β T, третий – x0 e–2β T и т.д. Отношение предыдущего размаха к последующему является декрементом затухания:
δ = eβ T, а его логарифм – логарифмическим декрементом затухания:
λ = ln δ = βT.
Еще раз вернемся к уравнению затухающих колебаний (8.6). При β = ω0 частота колебаний делается равной нулю, а при β > ω0 она становится даже мнимой величиной, и движение становится непериодическим или, как говорят, апериодическим. Так, например, шарик на пружине или физический маятник, погруженные в достаточно вязкую жидкость, возвращаясь к положению равновесия, будут приближаться к нему с неограниченно убывающей скоростью без колебаний. Это используется, например, для успокоения стрелок электроизмерительных приборов.
Вынужденные колебания. Резонанс
Вынужденными называются такие колебания, которые возникают в колебательной системе под действием внешней периодически изменяющейся силы (так называемой вынуждающей силы).
Пусть вынуждающая сила изменяется со временем по гармоническому закону f = F0 cos(ω t).
Составим уравнение движения с учетом вынуждающей силы: –kx – µx+ F0 cos(ω t) = mx.
Преобразуем это выражение: x+ 2β⋅x+ ω02x = f0 cos(ω t),
где f0 = ![]() F0
, β =
F0
, β = ![]() µ , ω02 =
µ , ω02 = ![]() k . m 2m m
k . m 2m m
Это неоднородное дифференциальное уравнение второго порядка с постоянными коэффициентами. Общее решение такого уравнения складывается из общего решения соответствующего однородного уравнения и частного решения неоднородного уравнения. Общее решение однородного уравнения, которое описывает затухающие колебания, мы уже знаем (уравнение (8.6)). Частное решение неоднородного уравнения имеет вид
xнеодн = a cos(ω t + ϕ), где
f0
a = . (8.7)
![]() (ω ω02
− 2
2) + 4β2
2ω
(ω ω02
− 2
2) + 4β2
2ω
Довольно быстро свободные колебания затухают, и амплитуда определяется выражением (8.7).
Амплитуда вынужденных колебаний зависит от частоты вынуждающей силы, и при некоторой частоте она достигает максимального значения. Это явление называется резонансом, а соответствующая частота – резонансной частотой.
Чтобы определить резонансную частоту ωрез, нужно найти максимум функции (8.7). Продифференцировав выражение для амплитуды по частоте и приравняв к нулю, мы получим условие, определяющее ωрез: – 4(ω02 – ω2) ω + 8β 2ω = 0.
![]() Это уравнение имеет три корня:
ω = 0 и ω = ±
ω2 −2β2 .
Это уравнение имеет три корня:
ω = 0 и ω = ±
ω2 −2β2 .
Подставив последнее значение в формулу (8.7), получим выражение для амплитуды при резонансе:
f0 aрез = .
![]() 2βω02
−β2
2βω02
−β2
При отсутствии сопротивления среды (β = 0) амплитуда при резонансе стремилась бы к бесконечности. При малом затухании амплитуда при резонансе приближенно равна
f aрез![]() .
.
![]() Разделим это выражение
на смещение x0 из положения равновесия под действием
постоянной силы F0, равное x0 = f0ω02
. В результате получим
Разделим это выражение
на смещение x0 из положения равновесия под действием
постоянной силы F0, равное x0 = f0ω02
. В результате получим
![]() aрез ω0 π
aрез ω0 π
≈ = = Q. x0 2β λ
Таким образом, добротность показывает, во сколько раз амплитуда колебаний в момент резонанса превышает смещение колеблющегося тела из положения равновесия под действием постоянной силы той же величины, что и амплитуда вынуждающей силы.
Автоколебания
При затухающих колебаниях энергия системы постоянно расходуется. Если восполнять эту энергию, то колебания можно сделать незатухающими. Пополнять энергию можно за счет толчков извне в такт с собственными колебаниями. Однако можно сделать так, чтобы сама колеблющаяся система управляла внешними воздействиями. Такая система называется автоколебательной.
Раздел механики, в котором изучается движение жидкости, называется гидродинамикой, а движение газа – аэромеханикой.
Изучаемые вещества рассматриваются как сплошные, непрерывно распределенные в занятой ими части пространства. Плотность жидкости мало зависит от давления. Плотность же газов от давления зависит сильно. Однако при решении многих задач сжимаемостью жидкости и газа можно пренебречь и пользоваться понятием несжимаемой жидкости.
Рассмотрим основные параметры, которыми характеризуется состояние жидкости или газа.
Давление
![]() Закон Паскаля
Закон Паскаля
Поместим в покоящуюся жидкость пластинку площадью ∆S (рис. 24). Части жидкости, находящиеся по разные стороны от нее, будут действовать на нее с силами ∆F, которые, независимо от того, как пластинка ориентирова- Рис. 24. на, будут равны по величине и направлены перпендикулярно к пластинке.
Физическая величина, равная отношению нормальной силы, действующей со стороны жидкости на некоторую площадь, к этой площади, называется давлением жидкости:
∆F
P = ![]() .
.
∆S
Единица давления – паскаль (Па). Один паскаль равен давлению, создаваемому силой в 1 Н, равномерно распределенной по нормальной к ней поверхности площадью 1 м2 : 1 Па = 1 Н/м2.
Давление при равновесии подчиняется закону Паскаля:
Давление в любом месте покоящейся жидкости одинаково по всем направлениям, причем давление одинаково передается по всему объему, занятому покоящейся жидкостью.
Гидростатическое давление
Рассмотрим распределение давления внутри покоящейся несжимаемой жидкости. При равновесии жидкости давление по горизонтали всегда одинаково, иначе не было бы равновесия. Поэтому свободная поверхность жидкости вдали от стенок всегда горизонтальна. Если плотность постоянна (жидкость несжимаема), то при поперечном сечении S столба жидкости, его высоте h и плотности ρ вес жидкости равен ρ ghS, и тогда давление на нижнее основание будет ρghS
p = ![]() =
ρ gh,
=
ρ gh,
S
т.е. давление покоящейся жидкости меняется линейно с высотой столба (с глубиной). Это давление называется гидростатическим.
Закон Архимеда
Т.к. гидростатическое давление растет с глубиной, то на нижние части тела будет действовать большая сила, чем на его верхние части.
На тело, погруженное в жидкость, действует со стороны этой жидкости направленная вверх сила (сила Архимеда), равная весу жидкости в объеме погруженной части тела.
FА = ρ gV.
Сила Архимеда приложена к центру тяжести тела.
Уравнение неразрывности
![]()
Движение жидкости изображается с помощью линий тока, которые проводятся так, чтобы касательные к ним совпадали по направлению с вектором скорости жидкости в соответствующих точках пространства. Линии тока проводятся так, чтобы густота линий была больше там, где скорость больше. Таким образом, по картине линий тока можно определить состояние движения жидкости (рис. 25).
Часть жидкости, ограниченную линиями тока, называют трубкой тока. Течение жидкости называется стационарным, или устоявшимся, если форма и расположение линий тока, а также значения скоростей в каждой точке со временем не изменяются.
Рассмотрим одну из трубок тока (рис. 26). Выберем два ее сечения S1 и S2. За время dt через сечение S1 проходит объем S1⋅v1⋅dt, а через S2 – объем S2⋅v2⋅dt.
Если жидкость несжимаема, то через оба сечения пройдет один и тот же объем,
т.е. S2
![]() S1⋅v1⋅dt = S2⋅v2⋅dt, или S1 v1 = S2 v2.
S1⋅v1⋅dt = S2⋅v2⋅dt, или S1 v1 = S2 v2.
Следовательно, произведение скорости течения несжимаемой жидкости на поперечное сечение трубки тока есть величина постоянная для данной трубки тока. Это соотношение называется уравнением неразрывности для несжи- Рис. 26.
маемой жидкости.
Уравнение Бернулли
p1 Выделим в стационарно текущей идеаль-
![]() ной жидкости (жидкости без вязкости),
трубку тока, ограниченную сечениями S1 и S2 (рис. 27). Пусть в сечении
S1 скорость
v1, давление
р1 и высота,
на котором расположено сечение, h1. Аналогично в сечении
S2 скорость
v2, давление
р2, высота h2. По истечении малого промежутка времени жидкость переместится от сечения
S1 к
S1', а
от S2
– к S2'.
Согласно закону сохранения энергии изменение полной энергии должно быть равно
работе внешних сил; трубка
с жидкостью как бы
скатится с горки.
ной жидкости (жидкости без вязкости),
трубку тока, ограниченную сечениями S1 и S2 (рис. 27). Пусть в сечении
S1 скорость
v1, давление
р1 и высота,
на котором расположено сечение, h1. Аналогично в сечении
S2 скорость
v2, давление
р2, высота h2. По истечении малого промежутка времени жидкость переместится от сечения
S1 к
S1', а
от S2
– к S2'.
Согласно закону сохранения энергии изменение полной энергии должно быть равно
работе внешних сил; трубка
с жидкостью как бы
скатится с горки.
Рис. 27. Энергия каждой частицы складывается из
ее кинетической энергии и потенциальной энер-
гии в поле сил тяжести. Вследствие стационарности течения частицы, находящиеся спустя время t в незаштрихованной части, имеют такую же скорость, как и те частицы, что были там раньше. Поэтому приращение энергии рассматриваемого объема от S1 до S2 при его перемещении в положение от S1' до S2' можно вычислить как разность энергий заштрихованных объемов.
Возьмем сечение трубки тока настолько малым, что всем точкам его можно было бы приписать одно и то же значение v, p и h. Тогда приращение энергии запишется следующим образом:
∆E = ![]() mυ22
+ ρgh2∆V –
mυ22
+ ρgh2∆V – ![]() mυ12
+ ρgh1∆V . (9.1)
mυ12
+ ρgh1∆V . (9.1)
2 2
В идеальной жидкости трение отсутствует. Приращение энергии должно равняться работе внешних сил. Силы давления на боковую поверхность перпендикулярны и работы не совершают. В сечениях же S1 и S2 совершается работа
A = p1S1∆l1 – p2S2∆l2 = (p1 – p2)⋅∆V . (9.2)
Приравнивая (9.1) и (9.2), сокращая на ∆V и перенося члены с одинаковыми индексами в одну часть, получим:
![]()
![]() ρυ2 + ρgh2
+ p2 = ρυ12
+ ρgh1 + p1.
ρυ2 + ρgh2
+ p2 = ρυ12
+ ρgh1 + p1.
2
Т.к. сечения S1 и S2 были взяты совершенно произвольно, то для любого сечения можно записать уравнение Бернулли ρυ2
![]() + ρgh + p = const.
+ ρgh + p = const.
2
Уравнение Бернулли
есть приложение закона сохранения энергии к стационарному
движению жидкости. В этом
уравнении р называется статическим давлением, ρυ2![]() 2 – динамическим
давлением, ρ·gh – гидростатическим давлением.
2 – динамическим
давлением, ρ·gh – гидростатическим давлением.
![]() Вязкость жидкостей υ1
Вязкость жидкостей υ1
Вязкость (внутреннее трение) – это свойство реальных жидкостей оказывать сопротивление перемещению одной части жидкости относительно другой. При перемещении одних слоев жидкости относительно других возникают
силы внутреннего трения F, направленные по υ2 S касательной к поверхности слоев (рис. 28). Дей- Рис. 28. ствие этих сил проявляется в том, что со стороны слоя, движущегося быстрее, на слой, движущийся медленнее, действует ускоряющая сила, а на движущийся быстрее – тормозящая сила. Сила внутреннего трения тем больше, чем больше рассматриваемая поверхность, и зависит от того, насколько быстро меняется скорость при переходе от слоя к слою (т.е. от отношения ∆v/∆x). Опыт показывает, что
F = η ![]() ∆υS,
∆υS,
∆x
где η – динамическая вязкость или просто вязкость. Единица вязкости – Паскаль-секунда (Па·с). Это такая вязкость, при которой при ламинарном течении и градиенте 1м/с на 1 м возникает сила трения 1 Н.
Движение вязкой жидкости
Существует два вида течения вязкой жидкости. Течение называется ламинарным, или слоистым, если каждый выделенный слой скользит относительно соседних слоев и не перемешивается с ними. Турбулентным, или вихревым, называется течение, при котором происходит интенсивное перемешивание жидкости.
Английский ученый Рейнольдс (1842-1912) доказал, что характер течения зависит от безразмерного коэффициента, который называется числом Рейнольдса
ρυl υl
Re = ![]() = , η ν
= , η ν
где
ν = ![]() – кинематическая вязкость, ρ – плотность жидкости, l – характерный
– кинематическая вязкость, ρ – плотность жидкости, l – характерный
линейный размер (например, диаметр трубы, диаметр шарика).
Поток в трубе будет ламинарным, если Re < 1000. В случае, когда Re > 1500, поток турбулентный. При промежуточных числах 1000…1500 течение нестабильно.
В случае сферы, движущейся в жидкости, ламинарным движение будет, когда Re < 5.
Движение тел в жидкостях и газах
Одной из задач гидро- и аэромеханики является исследование движения твердых тел в жидкостях и газах и, в частности, изучение сил, действующих на эти тела.
Силу, действующую на движущееся тело в жидкости или газе, можно разложить на две составляющие (рис.29). Одна сила, Rx, противоположна движению, а вторая, Ry, называемая подъемной, – перпендикулярна движению. Если тело симметрично, то на него действует только сила Rx лобового сопротивления. В идеальной жидкости лобовое сопротивление отсутствует.
![]() Иначе обстоит дело при
движении тел в вязкой
жидкости. Вследствие вязкости среды в области,
прилегающей к поверхности тела, образуется
пограничный слой частиц, движущихся с меньшими
скоростями. В результате тормозящего действия этого слоя возникает
вращение частиц, и движение
в пограничном слое становится
вихревым. Если тело не
имеет обте-
Иначе обстоит дело при
движении тел в вязкой
жидкости. Вследствие вязкости среды в области,
прилегающей к поверхности тела, образуется
пограничный слой частиц, движущихся с меньшими
скоростями. В результате тормозящего действия этого слоя возникает
вращение частиц, и движение
в пограничном слое становится
вихревым. Если тело не
имеет обте-
каемой формы, то пограничный слой отрывается и образует вихри.
Если скорости меньше скорости звука, то подъемная сила и лобовое сопротивление тел выражаются следующими зависимостями, полученными экспериментально:
Ry = Cy⋅ S ![]() и Rx = Cх⋅ S
и Rx = Cх⋅ S ![]() ,
,
где Сy и Сx – безразмерные коэффициенты, зависящие от числа Рейнольдса и формы тела.
Методы определения вязкости жидкости
Метод Стокса.
Этот метод основан на измерении скорости падения шарика в жидкости. Движение должно быть таким, чтобы не было превзойдено число Рейнольдса, т.е. ламинарным.
На шарик в жидкости действуют три силы (рис. 30): сила тяжести P = mg , си-
ла Архимеда FA = ![]() πr3ρжg , и сила
вязкого трения или сила
Стокса FC = −6πηυr .
πr3ρжg , и сила
вязкого трения или сила
Стокса FC = −6πηυr .
![]() При равномерном, установившемся, движении векторная сумма этих сил
равна нулю.
При равномерном, установившемся, движении векторная сумма этих сил
равна нулю.
P + FA + F = 0.
Спроецировав это уравнение
на ось Y и, подставив значение этих величин,
получим ![]() πr3ρт g
–
πr3ρт g
– ![]() 0.
0.
2(ρ ρт − ж)gr2
Откуда найдем η = ![]() .
.
9υ
Измерив скорость падения шарика, можно определить вязкость Рис. 30 жидкости.
Метод Пуазейля
В этом методе вязкость определяется по количеству жидкости прошедшей через капилляр.
![]() Рассмотрим капилляр радиусом R и длиной l (рис. 31). В капилляре выделим цилиндр радиусом r. На этот цилиндр
со стороны внешних слоев жидкости действует задерживающая сила dυ dυ
Рассмотрим капилляр радиусом R и длиной l (рис. 31). В капилляре выделим цилиндр радиусом r. На этот цилиндр
со стороны внешних слоев жидкости действует задерживающая сила dυ dυ
F = –η S = – η 2πrl,
Рис. 31 dr dr
где S – боковая поверхность выделенного цилиндра
радиуса r. Сила сопротивления уравновешивается разностью давлений ∆p=P1–P2
![]() dυ 2 откуда получим на концах
выделенного цилиндра: –η 2πrl = ∆pπr , dr
dυ 2 откуда получим на концах
выделенного цилиндра: –η 2πrl = ∆pπr , dr
dv = – ![]() .
.
Возьмем интеграл от обеих частей и, учтя, что скорость у стенок равна нулю,
найдем:
v = ![]() .
.
![]() Для нахождения объема вытекшей жидкости за время
t выделим в жидкости цилиндрический слой радиуса
r и толщиной dr (рис. 32). Будем считать, что скорость
в этом слое постоянна
и равна v. Через этот слой
за время t пройдет объем dV = 2πvtrdr.
Для нахождения объема вытекшей жидкости за время
t выделим в жидкости цилиндрический слой радиуса
r и толщиной dr (рис. 32). Будем считать, что скорость
в этом слое постоянна
и равна v. Через этот слой
за время t пройдет объем dV = 2πvtrdr.
Проинтегрировав это выражение от нуля до R, получим R R 4
2π∆pt 2 2 π⋅∆ ⋅p R t
V = ∫2πυr t dr⋅ = ![]() ∫r(R −
r )dr =
∫r(R −
r )dr = ![]() .
.
0 4ηl 0 8ηl
Рис. 32.
Из последнего выражения можно выразить вязкость
π⋅∆
⋅p R4
⋅t η = ![]() .
.
8Vl
Известно, что Аристотель считал состояние покоя неким предпочтительным состоянием, в котором всегда должно оказываться тело, если на него не действует сила. Из законов Ньютона же следует, что единого эталона покоя не существует. Например, играя в поезде в настольный теннис, вы обнаружили бы, что траектория шарика подчиняется законам Ньютона, как если бы вы играли на неподвижном столе, и вы не могли бы сказать, что именно движется – поезд или земля.
И Аристотель, и Ньютон верили в абсолютное время. Иными словами, они считали, что временной интервал между двумя событиями можно однозначно измерить, и что результат будет одинаков независимо от того, кто производит измерения, лишь бы у измеряющего были правильные часы. Время было полностью отделено от пространства и считалось не зависящим от него.
Представления, основанные на "здравом смысле", относятся к сравнительно медленным объектам (яблоко, планета), но они оказываются совершенно неуместными, когда скорости становятся близкими к скорости света. По современным данным значение скорости света с = 299792458 м/с.
Настоящей теории распространения света не существовало до 1865 г., когда английский физик Максвелл сумел объединить электричество и магнетизм в единую теорию. Эта теория предсказывала, что радиоволны и свет должны распространяться с некоторой фиксированной скоростью. Но поскольку теория Ньютона покончила с представлением об абсолютном покое, теперь, говоря о фиксированной скорости света, нужно было указать, относительно чего измеряется эта скорость. В связи с этим было постулировано существование субстанции, заполняющей все пространство, названной эфиром. Световые волны распространяются в эфире так же, как звуковые в воздухе, и, следовательно, их скорость – это скорость относительно эфира. Наблюдатели, движущиеся относительно эфира с разными скоростями, должны видеть, что свет идет к ним с разной скоростью. В частности, коль скоро Земля движется в эфире по своей орбите вокруг Солнца, скорость света, измеренная в направлении движения Земли, должна отличаться от скорости света, измеренной под прямым углом к направлению движения.
В 1887 г. Майкельсон и Морли поставили очень точный эксперимент по сравнению значения скорости света, измеренной в направлении движения Земли, с ее значением, измеренным в перпендикулярном направлении. Оба значения оказались совершенно одинаковыми.
С 1887 по 1905 г. был сделан ряд попыток (наиболее известная из которых принадлежит Лоренцу) объяснить результат эксперимента Майкельсона и Морли тем, что все движущиеся в эфире объекты сокращаются в размерах, а все часы замедляют свой ход.
В 1905 г. служащий патентного бюро Альберт Эйнштейн опубликовал рабо-
ту, в которой было показано, что никакого эфира не нужно, если отказаться от понятия абсолютного времени.
Постулаты Эйнштейна
Специальная теория относительности (СТО) Эйнштейна базируется на двух постулатах, являющихся обобщением опытных данных.
1. Обобщенный принцип относительности.
Во всех инерциальных системах отсчета все физические явления подчиняются одним и тем же законам, т.е. никакими физическими опытами, включая электромагнитные, нельзя обнаружить прямолинейное и равномерное движение одной системы относительно другой. 2. Постулат постоянства скорости света.
Скорость света в вакууме во всех инерциальных системах отсчета одинакова и не зависит от скорости источника и приемника света.
Относительность времени
Замечательным следствием из постулатов СТО является революция в наших представлениях о пространстве и времени. По теории Ньютона, если световой импульс послан из одной точки в другую, то время его прохождения, измеренное разными наблюдателями, будет одинаковым (поскольку время абсолютно), но пройденный им путь с точки зрения этих наблюдателей может оказаться разным (так как пространство не является абсолютным). Так как скорость света есть пройденное светом расстояние, деленное на время, разные наблюдатели будут получать разные скорости света.
В теории относительности все наблюдатели должны считать, что скорость распространения света одинакова для всех инерциальных систем отсчета. И поскольку расстояние, пройденное светом, для них может быть неодинаковым, время, затраченное светом на прохождение между двумя точками, также различно.
Иными словами, теория относительности покончила с понятием абсолютного времени. Оказалось, что у каждого наблюдателя должен быть свой масштаб времени, измеряемого с помощью имеющихся у него часов, и что показания одинаковых часов, находящихся у разных наблюдателей, не обязательно согласуются.
Преобразования Лоренца
Поскольку неверны представления Ньютона о свойствах пространства и времени, то также ошибочны и преобразования Галилея, из которых они вытекают. Таким образом, актуальной становится задача о нахождении таких преобразования координат, которые не противоречили бы преобразованиям Галилея для случая малых скоростей и объясняли бы указанные выше экспериментальные факты и противоречия.
![]() Рассмотрим две системы
координат (рис. 33). Одну из систем
(К) с осями x, y, z будем считать условно неподвижной. Другая, подвижная система (К′) с координатами
x′, y′, z′ движется относительно x, y, z со скоростью υ вдоль оси x. Время
будем отсчитывать от момента
t = t′ =
0, когда начала координат обеих систем совпадали: x = x′ = 0.
Рассмотрим две системы
координат (рис. 33). Одну из систем
(К) с осями x, y, z будем считать условно неподвижной. Другая, подвижная система (К′) с координатами
x′, y′, z′ движется относительно x, y, z со скоростью υ вдоль оси x. Время
будем отсчитывать от момента
t = t′ =
0, когда начала координат обеих систем совпадали: x = x′ = 0.
Рассмотрим вначале преобразования x и x′, вдоль которых происходит относительное перемещение систем. Учитывая, что в силу однородности пространства преобразования координат должны быть линейными, будем искать их в виде x′ =γ⋅(x – υ t), x =γ⋅(x′+υ t′) (10.1)
(таким образом, эти преобразования лишь множителем γ отличаются от галилеевских, см. стр. 10).
Наша задача заключается в том, чтобы найти γ. Пусть в момент времени t = t′ = 0 в начале координат произошла вспышка света. Координаты x и x′ фронта волны (которые мы будем называть xсиг и x′сиг) в моменты времени t и t′ (которые мы будем называть tсиг и t′сиг) будут равны, соответственно, xсиг = с tсиг и x′сиг = с t′сиг .
Подставляя эти соотношения в выражения (10.1), получим: с t′сиг =γ⋅(с – υ) tсиг , с tсиг = γ⋅(с + υ) t′сиг .
![]() Выразив t′сиг из первого
уравнения, подставив во второе
и сократив на tсиг,
найдем, что γ= ±1
1−υ2
c2 . Мы выбираем
в этом выражении «плюс», что означает сохранение выбранного направления вдоль осей x и
x′.
Выразив t′сиг из первого
уравнения, подставив во второе
и сократив на tсиг,
найдем, что γ= ±1
1−υ2
c2 . Мы выбираем
в этом выражении «плюс», что означает сохранение выбранного направления вдоль осей x и
x′.
Подставляя это значение в x и x′ и обозначая β = υ /с, находим координаты: x′ = x −υt , x = x′+υt′ . (10.2)
![]()
![]() 1−β2 1−β2
1−β2 1−β2
Исключив из этих уравнений x′ (или x) и преобразовав, получим закон преобразования времени:
xυ x′υ t′
=γt
− ![]() 2 , t
=γt′+
2 , t
=γt′+
![]() 2
. (10.3)
2
. (10.3)
c c
В направлении осей y и z смещения не происходит, т.е. в направлениях, перпендикулярных скорости, координаты преобразуются тождественно. Итак, преобразования Лоренца имеют вид:
2
![]() K ⇒
K′: x′
= x −υt2 , y′ = y, z′ = z, t′
=
t − xυc2 ;
K ⇒
K′: x′
= x −υt2 , y′ = y, z′ = z, t′
=
t − xυc2 ;
1−β 1−β
x′+υt′ t′+ x′υc2
![]() K′ ⇒ K: x
=, y = y′, z = z′, t
=. (10.4)
K′ ⇒ K: x
=, y = y′, z = z′, t
=. (10.4)
1−β2 1−β2
Эти преобразования впервые были получены Лоренцем и поэтому носят его
имя. Рассмотрим некоторые следствия этих преобразований.
1. Преобразования Лоренца – это преобразования не только координат, но и времени. В СТО пространство и время представляют собой единое многообразие, причем его принципиально нельзя разбить на два независимых многообразия. Это дало возможность одному из университетских учителей Эйнштейна, Герману Минковскому, изложить теорию относительности как четырехмерную теорию, в которой все векторы имеют не три, а четыре компоненты.
2. Формулы преобразования для штрихованных величин отличаются от формул для нештрихованных только знаком у скорости. Это соответствует равноправию обеих систем отсчета согласно первому постулату Эйнштейна.
3. Перейдя в формулах Лоренца к пределу при β → 0, получим формулы преобразований Галилея (см. лекцию 2, стр. 10). Таким образом, ньютоновская механика является предельным случаем СТО для малых скоростей.
4. При υ ≥ с преобразования Лоренца теряют смысл. Это означает, что в СТО скорость света является предельно возможной скоростью движения системы.
Релятивистская кинематика
Релятивистское сокращение длины. Относительность длины в СТО.
Рассмотрим твердый стержень, расположенный вдоль оси x′ и движущийся вместе с подвижной системой координат. Относительно этой системы стержень покоится, его концы имеют координаты x′1 и x′2 и длина стержня l0 = x′2 – x′1 = const.
Измерим длину стержня l = x2 – x1 в неподвижной системе координат, относительно которой он движется со скоростью υ. Для этого необходимо измерить координаты его концов в один и то же момент времени t в этой системе.
x2 −υt − x1 −υt x2 −x1 l
![]() l0= x′2 – x′1 = −β2 −β2 = −β2 = 1−β2 . (10.5)
l0= x′2 – x′1 = −β2 −β2 = −β2 = 1−β2 . (10.5)
1 1 1
Т.е. в неподвижной системе отсчета длина стержня становится меньше в (1−β)−1/2 раз.
Длина стержня, т.е. расстояние между двумя взаимно неподвижными точками пространства, в СТО является величиной относительной: один и тот же стержень имеет разные длины в различных системах отсчета. В СТО вводится так называемая собственная длина (в нашем случае l0) – это длина стержня в той системе, относительно которой он покоится. Собственная длина является наибольшей по сравнению его с длиной в любой другой инерциальной системе, движущейся относительно первой. Формула (10.5) характеризует релятивистское или лоренцево сокращение длины.
Релятивистское замедление времени.
Пусть в некоторой точке x′0 движущейся системы координат произошли два последовательных события в моменты времени t′1 и t′2. Промежуток времени между этими событиями равен ∆t′ = t′2 – t′1.
В неподвижной системе эти события происходят в разных точках. Промежуток времени в неподвижной системе координат равен:
![]() ∆t = t2 – t1
= t2′ + x0′υ2c2 − t1′ + x0′υ
c2 = t2′
−t1′ = ∆t′ . (10.6)
∆t = t2 – t1
= t2′ + x0′υ2c2 − t1′ + x0′υ
c2 = t2′
−t1′ = ∆t′ . (10.6)
−β 1−β2 1−β2 1−β2
1
Видно, что в неподвижной системе координат эти события будут разделены бóльшим промежутком времени, чем в подвижной.
Релятивистский эффект замедления времени, как и сокращение длин, заметен только при скоростях, сравнимых со скоростью света. Если же относительные скорости систем много меньше скорости света, то время едино для всех систем, как и считал Ньютон.
Парадокс близнецов
Представим себе двух близнецов, один из которых (назовем его А) остается на Земле, а другой (В) отправляется в космическое путешествие со скоростью, близкой к с. Каждый из братьев отсчитывает время по своим часам: космонавт – по часам корабля (∆t′), землянин – по земным часам (∆t). Представим далее, что космонавт вернулся на Землю и встретился со своим братом. Если братья захотят выяснить, сколько времени длилось путешествие, то установят, что по часам космонавта оно длилось, например, 3 года, а по земным часам – целых 10 лет: ведь согласно формуле (10.6) движущиеся часы космонавта отмечают меньшее время, чем «неподвижные» часы на Земле, т.е. «движущиеся часы отстают». Итак, космонавт «помолодел» на 7 лет. Он окажется моложе своего брата-близнеца.
Сразу отметим, что подобное путешествие в будущее других людей, а не в свое собственное будущее, не противоречит теории относительности и не является парадоксальным. Действительный парадокс близнецов состоит в следующем. В соответствии с принципом относительности можно высказать два физически равноправных утверждения:
1) космонавт движется, землянин неподвижен;
2) космонавт неподвижен, а землянин движется относительно него с той же скоростью, но в противоположном направлении.
Согласно СТО, «молодеет» движущийся наблюдатель, и получается действительно парадоксальная ситуация: с одной стороны, космонавт должен быть моложе землянина, а с другой – землянин моложе космонавта.
Этот парадокс разрешается следующим образом. Два брата, находящиеся в различных инерциальных системах, могут встретиться «с глазу на глаз» только один раз, пролетая один мимо другого; затем они навсегда разойдутся. Чтобы братья смогли снова встретиться, один из них, а именно космонавт, должен повернуть обратно, т.е. сменить систему отсчета. Таким образом, задача перестает быть симметричной с точки зрения СТО. Основываясь на преобразованиях Лоренца, можно показать, что «помолодеет» брат-космонавт, так как именно он менял свою систему отсчета.
Релятивистский закон преобразования скоростей
Классический (Галилеев, см. стр. 11) закон преобразования скоростей не может быть справедливым в СТО, так как согласно ему скорость света различна в разных системах отсчета, что противоречит второму постулату Эйнштейна. Найдем релятивистский закон сложения скоростей, исходя из преобразования Лоренца (10.4).
Пусть в подвижной системе координат материальная точка движется вдоль оси x′ с постоянной скоростью υ′ = x′/t′ (для упрощения расчетов положим, что при t = t′ = 0 материальная точка находилась в начале отсчета систем координат x = x′ = 0). Подвижная система координат движется со скоростью υ0 относительно неподвижной. Определим, чему равна скорость точки относительно неподвижной системы координат, т.е. υ = x/t.
![]()
![]() x′1+−υβ0t2′ =
t′+1x−′υβ0
2c2 (здесь β = υc0
).
x′1+−υβ0t2′ =
t′+1x−′υβ0
2c2 (здесь β = υc0
).
x =; t
Разделив первое уравнение на второе, получим
x x′+υ0t′
![]() υ= =
′+ x′υ0
c2 . t t
υ= =
′+ x′υ0
c2 . t t
Разделив числитель и знаменатель на t′, найдем:
υ= 2
![]() x
t1′
′+ x+′′υcυ00
=
1υ υ+′υυ+c′200 . (10.7)
x
t1′
′+ x+′′υcυ00
=
1υ υ+′υυ+c′200 . (10.7)
t
Это равенство выражает релятивистский закон сложения скоростей. При малых скоростях движения (υ′ << с и υ0 << с) релятивистский закон сложения скоростей переходит в обычный закон сложения скоростей в ньютоновской механике (см. лекцию 2, стр. 11). Т.е. классическая механика не отвергается, но лишь ограничивается пределами применимости. Она верна как частный случай – случай малых скоростей.
Элементы релятивистской динамики
В теории относительности в качестве импульса также принимается величина p m= υ. Однако требование выполнения закона сохранения импульса во всех инерциальных системах с учетом релятивистского закона сложения скоростей приводит к следующей зависимости массы тела m от скорости:
m0
m =, (10.8)
![]() 1−β2
1−β2
где величина m0 представляет собой массу покоящегося тела и называется массой покоя. При небольших скоростях движения зависимостью массы от скорости можно пренебречь.
Релятивистская кинетическая энергия
Второй закон Ньютона с учетом зависимости массы тела от его скорости в релятивистском случае может быть формально записан так же, как и в нерелятивистском:
dp d m( ⋅υ) dυ dm
![]() F = = = m +υ
. (10.9)
dt dt dt dt
F = = = m +υ
. (10.9)
dt dt dt dt
В лекции 5 мы показали, что изменение кинетической энергии тела равно работе действующей на него результирующей силы. Предположим, что в релятивистском случае изменение кинетической энергии можно рассчитать аналогично.
Пусть на тело, неподвижное в начальный момент, действует сила. Скорость тела будет возрастать, оставаясь направленной вдоль силы. Поэтому во втором законе Ньютона (11.7) можно не учитывать векторный характер величин:
dυ dm
F = m
![]() +υ . dt dt
+υ . dt dt
Умножим обе части этого уравнения на элементарное перемещение dx = υ·dt:
F dx⋅ = mυ⋅dυ υ+ 2 ⋅dm. (10.10)
Учитывая, что β =υ /c, из (10.8) получим
![]() 2 m( 0υ⋅d2υ
υ υ) =
mc2 −⋅υd 2 . dm = 3
2 c 1−β
2 m( 0υ⋅d2υ
υ υ) =
mc2 −⋅υd 2 . dm = 3
2 c 1−β
Подставим это выражение в (10.10):
![]() F dx
F dx
![]() ⋅ = 1+
c2υ−2υ2
mυ
υ⋅d =
(1−mυ0υ
υ2
⋅cd2 )3/2
.
⋅ = 1+
c2υ−2υ2
mυ
υ⋅d =
(1−mυ0υ
υ2
⋅cd2 )3/2
.
Левая часть выражения представляет работу, которая совершена при данном перемещении dx. Эта работа пошла на изменение dT кинетической энергии тела, которая выражается правой частью уравнения. Вычислим интеграл:
![]()
![]() T = υ∫(m0υ⋅d)υ3/
2 = m0c2 – m0c2= m c0
2 1
−1. (10.11)
T = υ∫(m0υ⋅d)υ3/
2 = m0c2 – m0c2= m c0
2 1
−1. (10.11)
0 1−β2 1−β2 1−β2
Эта релятивистская формула справедлива в общем случае. При υ << с она переходит в формулу ньютоновской механики T = mυ2 /2 (см. стр. 20).
Связь между энергией и массой. Энергия покоя
Вернемся к формуле (10.11) для кинетической энергии. Величина
m0c2
Е =
![]() 1−β2
1−β2
называется полной энергией, а величина
E0 = m0c2 называется энергией покоя или собственной энергией тела. Согласно специальной теории относительности, неподвижное тело, даже в отсутствии силовых полей, обладает энергией.
Формула для полной энергии может быть записана в виде.
Е = mc2. (10.12)
Это знаменитый закон Эйнштейна о взаимосвязи массы и энергии. Он утверждает, что энергия и масса – эквивалентны. Если, например, электрическое или магнитное поле обладают энергией, то они имеют массу. Поэтому закон (10.12) справедлив не только для частиц, имеющих массу покоя, но и, например, для фотонов.
Соотношение между энергией и импульсом
В современной физике очень важную роль играет соотношение между энергией и импульсом. Выведем это соотношение.
Возведем в квадрат выражения для релятивистской энергии и импульса:
![]() р2 = m
р2 = m![]() 22
= m
c02
2β22 , (10.13) 1−β
1−β
22
= m
c02
2β22 , (10.13) 1−β
1−β
Е2 = ![]() m02c42
.
m02c42
.
1−β
Сравнивая эти выражения, можно заметить, что
E2 p2
![]() 2 = 2
. (10.14)
2 = 2
. (10.14)
c β
Выразив из (10.13) β 2 и подставив его в (10.14), получим окончательно:
E2 = c2p2 + m02 c4. (10.15)
Соотношение (10.15) широко используется в современной физике. Например, для фотона m0 = 0, поэтому E = p⋅c.
Введение
В основе механики лежат законы Ньютона. Эти законы позволяют описать движение макроскопических тел. Для полного описания движения системы тел достаточно знать их координаты и импульсы в некоторый момент времени, а также силы, действующие на тела в процессе движения. Законы механики очень точны. Именно эти законы используются для расчета траекторий космических аппаратов и управления их движением.
Кроме механических, вокруг нас происходят явления, которые определяются изменениями температуры. Например, застывание и испарение воды, расширение тел при нагревании, плавление металлов. Все эти явления называются тепловыми.
Люди давно заметили, что на огне изменяются свойства тел. Более чем 5000 лет назад были изобретены обожженный кирпич и гончарный круг. Более чем 4000 лет назад началась выплавка и обработка металлов. Около 300 лет назад был изобретен тепловой двигатель.
Совершенствование теплового двигателя потребовало более глубокого понимания природы тепловых явлений. Изучение закономерностей превращения тепла в механическую работу позволило не только создать одну из самых точных физических теорий вещества – термодинамику, но и понять природу теплоты – хаотическое молекулярное движение.
Мы приступаем к изучению раздела физики, связанного со свойствами тел, определяемыми хаотическим движением молекул, из которых они состоят.
Особенности описания состояния молекулярной системы
Развитие науки показало, что все тела состоят из громадного числа атомов. Если считать каждый атом маленьким твердым шариком, то с первого взгляда задача описания свойств вещества кажется простой. Действительно, с точки зрения механики, задача нахождения состояния частицы сводится к интегрированию дифференциальных уравнений второго порядка. Если известны координаты и скорости всех частиц в некоторый момент времени (т.е. задано начальное состояние системы) и заданы взаимодействия частиц, то можно найти состояние системы (координаты и скорости частиц) в любой другой момент времени. Конечно, есть трудности количественного характера. Например, чтобы просто сосчитать молекулы, содержащиеся в одном моле вещества, называя, предположим, целых десять за одну секунду (!), потребуется 6⋅1023:10:3600:24:365 ≈ 1,9⋅1015 или почти 2 миллиона миллиардов лет, что в сто тысяч раз превышает оцененный на сегодня возраст Вселенной! Но, по словам Лапласа (1749-1827): «Разум, который для какого-то данного момента времени знал бы все силы, действующие в природе, и относительное расположение всех ее частей, если бы он, кроме того, был бы достаточно обширен, чтобы подвергнуть эти данные анализу, обнял бы в единой формуле движения самых огромных тел во Вселенной и самого легкого атома… Кривая, описываемая молекулой воздуха или пара, управляется столь же строго и определенно, как и планетные орбиты; между ними та лишь разница, что налагается нашим неведением».
Такое представление о природе вошло в историю под названием «лапласовский детерминизм». Оно предполагает полную предопределенность развития мира, без шансов изменить судьбу даже самой маленькой частички.
В действительности, системы, состоящие из огромного числа взаимодействующих частиц, ведут себя так, что ничтожные неточности в задании начальных условий экспоненциально увеличиваются с течением времени. Поэтому уже через короткий, по меркам системы, промежуток времени ее состояние становится совершенно неопределенным (конечно, по отношению к нашему косному мышлению). Например, уже после пары столкновений молекула газа при нормальных условиях «не помнит» своего недавнего прошлого.
Ситуация с классической определенностью еще более усугубляется, если учесть, что, согласно современным квантовомеханическим представлениям, положения и скорости частиц не могут быть заданы одновременно сколь угодно точно. Стало быть, не остается никакой возможности для механистического описания молекулярных систем.
Следовательно, понятие состояния для молекулярных систем должно быть пересмотрено. Для исследования процессов, происходящих в телах, применяют два метода описания состояний молекулярных систем и их эволюции: статистический (молекулярно-кинетический) и термодинамический. Первый лежит в основе молекулярной физики, второй – термодинамики.
Молекулярно-кинетический или статистический подход
Предметом молекулярной или статистической физики является изучение закономерностей, которым подчиняются системы, состоящие из огромного числа частиц. Эти закономерности, называемые статистическими, проявляются, например, в том, что с большой точностью из одного миллиона подброшенных случайным образом монет половина выпадет «решкой» вверх; или что в двух половинах сосуда в условиях равновесия найдется одинаковое количество молекул, обладающих скоростями в интервале от 100 м/с до 200 м/с. Такую закономерность лучше описывать на языке теории вероятности, используя понятие плотности вероятности или функции распределения.
Пусть все направления в системе равноправны, N – полное число частиц в системе, а dNυ – число частиц имеющих модуль скорости в диапазоне от υ до υ+dυ. Учитывая, что для бесконечно малых диапазонов скоростей число частиц dNυ пропорционально dυ, получим следующее выражение для вероятности нахождения частицы со скоростью, имеющей значение от υ до υ+dυ :
![]() dNυ
=
F(
)υ
⋅dυ.
dNυ
=
F(
)υ
⋅dυ.
dpυ =
N
Функция F(υ) называется плотностью вероятности обнаружения частицы со скоростью от υ до υ +dυ или функцией распределения молекул по скоростям. Аналогично можно ввести понятие о функции распределения молекул по координатам, иными словами, плотности распределения вероятности обнаружения частицы в заданном месте.
Функция распределения позволяет находить средние значения параметров молекул. Например, среднюю скорость можно найти следующим образом:
![]() . (1.1)
. (1.1)
Функция распределения определяет наше максимальное знание о молекулярной системе: невозможно задать точно все положения и скорости молекул; мы можем оперировать лишь вероятностями. Таким образом, знание функций распределения скоростей и координат молекул задает состояние статистической системы.
Следует подчеркнуть, что статистические закономерности определяют состояние систем, состоящих из очень большого числа частиц. Для систем, состоящих из нескольких частиц, эти закономерности теряют всякий смысл.
Термодинамический метод
Изучением различных свойств тел занимается также термодинамика. Однако в отличие от молекулярно-кинетической теории она не интересуется микроскопической картиной. Не вводя в рассмотрение молекулы и атомы, термодинамика позволяет делать ряд выводов относительно протекания процессовВ основе. термодинамики лежат несколько фундаментальных законов, установленных на основе большой совокупности опытных фактов.
Термодинамика имеет дело с термодинамической системой – совокупностью макроскопических тел, которые взаимодействуют и обмениваются энергией как между собой, так и с другими телами. Основа термодинамического метода – определение состояния термодинамической системы.
Состояние задается термодинамическими параметрами, которые представляют собой непосредственно или косвенно измеряемые физические величины. Например, для описания состояния некоторой массы газа достаточно задать его температуру, давление и объем.
Температура, давление, объем
Температура – одно из основных понятий, играющих важную роль не только в термодинамике, но и в физике в целом. Температура тела – это физическая величина, характеризующая состояние термодинамического равновесия макроскопической системы.
Поскольку температура не является непосредственно измеряемой величиной, ее значение определяют по изменению какого-либо свойства термометрического вещества (ртути, спирта). В температурной шкале обычно устанавливают две основные температуры. Эти точки называются реперными точками (франц. repere – метка, знак, исходная точка).
Одними из первых были шкалы Фаренгейта, Реомюра и Цельсия.
В шкале Фаренгейта, предложенной в 1714 г. немецким физиком Д. Фаренгейтом (1686-736) для сконструированного им спиртового термометра, были выбраны две реперные точки, соответствующие температуре таяния льда (32°F) и температура человеческого тела (96°F). Интервал между этими температурами был разделен на 64 равные части, названные градусами Фаренгейта. На расстоянии, равном 32 таким делениям, ниже точки таяния льда была помещена нулевая точка (0°F), соответствующая самой низкой из известных тогда температур.
Эта шкала применяется до настоящего времени, например, в США. Связь между температурами по шкале Фаренгейта и Цельсия определяется выражением
t°C = tF −32 F . 9
В 1730 г. французский естествоиспытатель Р. Реомюр (1683-1757) предложил температурную шкалу между двумя реперными точками: таяния льда и кипения воды при нормальном атмосферном давлении. Первой точке Реомюр приписал значение 0°R, а второй точке 80°R и разделил температурный промежуток на 80 равных частей.
В 1742 г. шведским ученым А. Цельсием (1701-1744) была предложена температурная шкала, в которой интервал между температурой таяния льда и кипения воды при нормальном атмосферном давлении был разделен на 100 равных частей, названных градусами Цельсия. Первоначально Цельсий присвоил температуре точки кипения воды 0° С, а таяния льда 100° С. Впоследствии направление было изменено. Это обратное обозначение используется и в наше время.
В физике кроме шкалы Цельсия используется термодинамическая шкала. Термодинамическая шкала является основной, она имеет одну реперную точку – тройную точку воды (вторая точка – точка абсолютного нуля – 0 К). Под тройной точкой воды понимается такая точка на диаграмме состояния, в которой жидкое, твердое и газообразное агрегатные состояния воды одновременно находятся в равновесии друг с другом. Давление паров воды в тройной точке равно 611 Па. Температуре тройной точки воды присвоено значение 273,16 К (точно). Это значение выбрано так, чтобы интервал или разность температур в кельвинах был равен интервалу в градусах Цельсия. Температура таяния льда на 0,01 К меньше температуры тройной точки, т.е. она равна 273,15 К, и 0°С соответству-
ет 273,15 К.
Преимуществами термодинамической температурной шкалы является независимость ее свойств от термометрического тела и высокая точность воспроизведения тройной точки воды (ее реализуют с точностью 0,0001 К).
Понятие давления мы определили в гидродинамике. Давление равно отношению силы, действующей нормально на единицу площади: P=F/S.
Понятие объема вами осознается интуитивно. Грубо говоря, объем можно определить как меру вместимости.
Термодинамическое равновесие. Термодинамический процесс
Если состояние системы не меняется со временем, то говорят, что она находится в термодинамическом равновесии, а само состояние называют равновесным.
Параметры состояния могут изменяться. Изменение состояния или переход от одного состояния к другому называется термодинамическим процессом. Например, любое неравновесное состояние стремится к равновесию. Процесс, установления равновесия в системе называется релаксацией.
Если каждое промежуточное состояние системы в некотором процессе является равновесным, то и весь процесс называется равновесным. Реальные физические процессы не равновесны. Для того чтобы процесс был равновесным, необходимо проводить его с такой скоростью, чтобы на любом бесконечно малом шаге успевала осуществиться релаксация, т.е. бесконечно медленно.
Газовые законы
Газы обладают тем свойством, что они заполняют весь сосуд, в который они заключены, и оказывают давление на стенки этого сосуда.
Некоторое количество газа характеризуется следующими четырьмя величинами: массой m, занимаемым объемом V, давлением P и температурой Т. Все эти величины зависят друг от друга; при изменении одной изменяются другие. Выражение, закономерно связывающее эти величины, называется уравнением состояния.
Прежде чем записать уравнение состояния газа, приведем простые эмпирические закономерности, относящиеся к случаю, когда две из четырех указанных величин поддерживается постоянными.
Закон Бойля – Мариотта
Для данной массы газа при постоянной температуре произведение давления газа на его объем есть величина постоянная: PV = const.
Графически зависимость P от V для данной массы газа m при постоянной температуре имеет вид гиперболы. Так как процесс происходит при постоянной температуре, то он называется изотермическим, а кривая – изотермой.
Законы Гей-Люссака
Объем данной массы газа при постоянном давлении изменяется линейно с температурой:
V = V0⋅(1 + α⋅t).
Давление данной массы газа при постоянном объеме изменяется линейно с температурой:
P= P0⋅(1 + α⋅t).
В этих уравнениях температура измеряется по шкале Цельсия; P0 и V0 – давление и объем при 0°С; коэффициент α = 1/273,15 K–1.
Процесс, протекающий при постоянном объеме, называется изохорным, а прямая, изображающая этот процесс в координатах V, t, – изохорой.
Процесс, протекающий при постоянном давлении, называется изобарным, а его график – изобарой.
Очевидно, что как изобара, так и изохора пересекают ось температур в точке t = –1/α = –273,15°C, определяемой из условия 1 + α⋅t = 0. Если сместить начало координат в эту точку, то происходит переход к термодинамической шкале температур, или шкале Кельвина: T = t + 1/α.
Введя в формулы термодинамическую температуру, законам Гей-Люссака можно придать более простой вид:
V1 = T1 , при P = const, P1 = T1 , при V = const.
V2 T2 P2 T2
Закон Авогадро
Моли любых газов при одинаковых температурах и давлениях занимают одинаковые объемы. При нормальных условиях (P = 1,013⋅105 Па; Т = 273,15 К) этот объем равен Vµ = 22,42⋅10–3 м3/моль.
В одном моле различных веществ содержится одинаковое количество молекул, называемое постоянной Авогадро: NА = 6,022⋅1023 моль–1.
Этот закон позволяет измерять молекулярные массы очень простыми средствами. Вначале измеряют массу резинового шарика, наполненного изучаемым газом, а затем воздухом. Затем от полученных масс отнимают массу шарика. Отношение масс изучаемого газа и воздуха пропорционально отношению молекулярных масс газов.
Закон Дальтона
Давление идеальных газов смеси равно сумме парциальных давлений входящих в нее газов, т.е.
P = P1+ P2 + P3 .
Парциальным называется давление, которое создавал бы газ, если бы он один занимал весь объем смеси при данной температуре.
Уравнение Клапейрона-Менделеева
Состояние некоторой массы газа определяется тремя параметрами: P, V, Т.
Между этими параметрами существует связь, называемая уравнением состояния. Пользуясь законами Гей-Люссака и Бойля-Мариотта, можно найти такую связь:
PV
![]() = B = const. T
= B = const. T
Это – уравнение Клапейрона, в котором постоянная В имеет различное значение для различных газов.
Менделеев объединил уравнение Клапейрона с законом Авогадро. Согласно закону Авогадро, при одинаковых давлении и температуре моли всех газов занимают одинаковые объемы Vµ, поэтому для одного моля уравнение Клапейрона примет следующий вид:
PVµ
![]() =
R. (1.2)
=
R. (1.2)
T
Постоянная
R одинакова для всех газов,
поэтому она называется универсальной газовой постоянной. Её численное
значение R =
8,314 Дж![]() (моль⋅K)
.
(моль⋅K)
.
Если
при некоторых условиях один моль
газа занимает объем Vµ, то при
тех же условиях масса m газа занимает объем V = (m![]() µ)Vµ, где µ – молярная
масса газа. Величина ν = m
µ называется количеством вещества.
µ)Vµ, где µ – молярная
масса газа. Величина ν = m
µ называется количеством вещества.
![]() Подставив Vµ = µ
mV в
уравнение (1.2), получим m
Подставив Vµ = µ
mV в
уравнение (1.2), получим m
PV = ![]() RT. (1.3)
µ
RT. (1.3)
µ
Это соотношение носит название уравнения Клапейрона-Менделеева. Часто используется другая форма этого уравнения. Введем в уравнение (1.3) постоянную Больцмана, которая определяется так:
![]() R 8,31 23
–23Дж/К. (1.4) k = = = 1,38 ⋅10
R 8,31 23
–23Дж/К. (1.4) k = = = 1,38 ⋅10
NA 6,022045 10⋅
Уравнение состояния принимает вид
P = nkT, (1.5) где n =NA/Vµ – концентрация молекул.
Таким образом, давление газа при данной температуре прямо пропорционально концентрации молекул.
Лекция 2. Основное уравнение молекулярно-кинетической теории
Идеальный газ
Газообразное состояние характеризуется тем, что атомы или молекулы большую часть времени находятся далеко друг от друга. Силы взаимодействия возникают между ними только во время столкновения. Столкновения приводят к обмену энергиями. Удары считают абсолютно упругими. После таких упрощений мы приходим к модели идеального газа.
Идеальным называется газ, удовлетворяющий следующим условиям:
1. Собственный объем частиц газа очень мал по сравнению с объемом сосуда, в котором он находится.
2. Силы взаимодействия между молекулами отсутствуют.
3. Столкновения частиц газа между собой и со стенками сосуда являются упругими.
4. Частицы газа находятся в беспорядочном хаотическом движении.
Основное уравнение молекулярно-кинетической теории
Суть кинетической теории газов очень проста: давление газа есть результат бомбардировки стенок молекулами газа.
Рассмотрим сосуд в виде куба с длиной ребра l, в котором находится N молекул. Молекулы находятся в беспорядочном хаотическом движении. Ввиду полной беспорядочности движения, результат их действия на стенки будет таков, как если бы треть всех молекул двигалась прямолинейно между передней и задней стенками, другая треть – между верхней и нижней, и последняя треть – между левой и правой стенками сосуда.
Пронаблюдаем за движением одной молекулы массы m0, летящей слева направо со скоростью υ. В этом же направлении проведем ось x. Во время удара о стенку молекула отскочит назад, в результате чего проекция ее импульса на ось x изменится на ∆рx = –m0υ – m0υ = –2m0υ. Импульс, ∆р′ полученный стенкой, в соответствии с третьим законом Ньютона будет иметь противоположный знак: ∆р′ = 2m0υ. Через время ∆t = 2l/υ молекула вернется и вновь ударится о стенку, т.е. стенка систематически через каждый промежуток времени ∆t будет получает импульс 2m0υ. Среднюю силу Fср, действующую на стенку со стороны одной молекулы, найдем из второго закона Ньютона:
∆p′ 2mυ 2⋅mυ2 mυ2
![]() Fср= = 0 = 0 = 0 .
Fср= = 0 = 0 = 0 .
∆t ∆t 2⋅l l
Молекулы газа движутся с различными скоростями, поэтому суммарная сила F равна
mυ2 mυ2 mυ2
![]() F
= 0 1
+
0 2
+
+...
F
= 0 1
+
0 2
+
+... ![]() 0 nx , l l l
0 nx , l l l
где nx = N/3 – число молекул, движущихся между правой и левой стенками (т.е. вдоль оси x). Преобразуем последнее выражение:
![]() F =
m0 n
υ12
+
+ +υ22nx...
υn2x . l x
F =
m0 n
υ12
+
+ +υ22nx...
υn2x . l x
Величина
υ2кв = (υ12 +υ22
+...+υn2x )![]() nx представляет собой среднее значение квадратов скоростей или, другими
словами, среднюю квадратичную скорость. В результате
получим:
nx представляет собой среднее значение квадратов скоростей или, другими
словами, среднюю квадратичную скорость. В результате
получим:
![]()
![]() m0 ⋅υкв2 =
m0υкв2 N
.
m0 ⋅υкв2 =
m0υкв2 N
.
F = nx
l 3⋅l
Если правую и левую часть этого уравнения разделить на площадь стенки, то найдем давление:
1 N 2 1 2
P = ![]() 3 m0υкв =
3 m0υкв = ![]() n
m⋅
0υкв , (2.1)
n
m⋅
0υкв , (2.1)
3 l 3 где n = N/l3 – концентрация газа. Это уравнение называют основным уравнением молекулярно-кинетической теории идеальных газов.
Величина ρ = n⋅m0 – плотность газа, поэтому можно записать:
1 2
P = ![]() ρυкв.
ρυкв.
3
Это уравнение позволяет оценить простыми средствами среднюю квадратичную скорость молекул из значений давления и плотности газа.
Физический смысл давления и температуры
Как следует из приведенных выше рассуждений, давление газа на стенки сосуда обусловлено ударами молекул. Величина давления определяется средним импульсом, передаваемым молекулами стенке в единицу времени, или средней силой. Но сила или импульс – векторные величины, давление же – скалярная. Чтобы понять эту особенность, основному уравнению (2.1) можно придать другой вид. Действительно, т.к.
ε=m0υкв2
![]() 2 (2.2)
2 (2.2)
есть средняя кинетическая энергия поступательного движения одной молекулы, то
P = ![]() n
nε. (2.3)
Величина
Eпост = nε есть кинетическая
энергия поступательного движения всех молекул
газа в единице объема, поэтому
P =![]() Eпост.
Eпост.
Эта формула позволяет понять физический смысл давления. Давление есть физическая величина, пропорциональная кинетической энергии поступательного движения молекул.
Для того, чтобы понять физический смысл температуры, приравняем выражения (1.5) и (2.3). Получим:
2 3
Т = ![]()
ε, или ε= ![]() kT . (2.4)
kT . (2.4)
3k 2
Таким образом: температура – величина, пропорциональная средней кинетической энергии одной молекулы. Последняя, в свою очередь, не зависит от массы молекулы, а определяется только температурой.
Средняя квадратичная скорость
Приравняв выражения (2.2) и (2.4), получим:
3kT
![]() υкв =. (2.5)
υкв =. (2.5)
m0
Эту формулу можно преобразовать, умножив числитель и знаменатель выражения, стоящего под корнем, на NA. Т.к. R = kNA, а µ = m0NA, то µ/R=m0/k, и выражение приобретает вид:
3RT
![]() υкв =.
υкв =.
µ
Распределение Больцмана
Какую роль играет «вес» воздуха, точнее, сила тяжести в образовании атмосферного давления? Иногда считают, что атмосферное давление обусловлено весом столба воздуха. Это, однако, не совсем так. В космическом корабле воздух не имеет веса, но, тем не менее, производит давление. На самом деле давление газа обусловлено только беспорядочным тепловым движением молекул, мерой энергии которого является абсолютная температура.
При отсутствии внешних сил молекулы газа равномерно распределяются по всему объему, предоставленному газу. Так, при отсутствии силы тяжести земная атмосфера рассеялась бы в космическом пространстве. Сила тяжести исполняет роль «верхней стенки сосуда» для земной атмосферы. Если бы не было теплового движения молекул, эта сила привела бы к оседанию атмосферы на поверхность Земли. Одновременное наличие двух противоположных факторов приводит к неравномерному распределению молекул по высоте, к уменьшению их концентрации с высотой над поверхностью Земли.
![]() Выделим в атмосфере
цилиндр с основанием S, находящимся на поверхности
Земли, и высотой, пронизывающей всю атмосферу
(рис. 34). Выделим в этом
цилиндре элемент объема, который представляет собой цилиндрик высотой dh. Нижнее основание его находится
на высоте h, а верхнее – на высоте
h + dh. Обозначим
атмосферное давление на высотах
h и h + dh
соответственно через P и P + dP. Разность сил, действующих
сверху и снизу, уравновешивается силой тяжести этого элемента. Следовательно, приращение давления dP является отрицательной величиной, и атмосферное
давление уменьшается с высотой.
Изменение давления на разности
высот dh обусловлено весом газа:
Выделим в атмосфере
цилиндр с основанием S, находящимся на поверхности
Земли, и высотой, пронизывающей всю атмосферу
(рис. 34). Выделим в этом
цилиндре элемент объема, который представляет собой цилиндрик высотой dh. Нижнее основание его находится
на высоте h, а верхнее – на высоте
h + dh. Обозначим
атмосферное давление на высотах
h и h + dh
соответственно через P и P + dP. Разность сил, действующих
сверху и снизу, уравновешивается силой тяжести этого элемента. Следовательно, приращение давления dP является отрицательной величиной, и атмосферное
давление уменьшается с высотой.
Изменение давления на разности
высот dh обусловлено весом газа:
mg = – dP·S.
Здесь m – масса газа в элементе объема, g – ускорение свободного падения. Массу газа на высоте h выразим через уравнение Клапейрона – Менделеева
(1.3):
PVµ PSµ
![]() m = = dh
. RT
RT
m = = dh
. RT
RT
Комбинируя два последних выражения, после
соответствующих преобразований получим дифференциальное уравнение: dP µg
![]() =− dh,
=− dh,
P RT
интегрирование которого в случае изотермической атмосферы (T=const) дает: µg
ln(P)
= – ![]() h
+C
. RT
h
+C
. RT
Постоянную интегрирования найдем из условия равенства P = P0 на поверхности Земли (h = 0): ln(P0) = C. После подстановки этой константы получим выражение
µgh
−![]()
P = P0 e RT , называемое барометрической формулой. Из нее следует, что атмосферное давление убывает с высотой по экспоненциальному закону.
![]() Используя уравнение (1.5), преобразуем барометрическую формулу к виду
n=n0e−µgh RT() . Принимая во внимание
полученное выше равенство µ/R=m0/k (см. стр.
62) и учитывая, что m0gh = EП –
потенциальная энергия молекулы газа на
высоте h, получим:
Используя уравнение (1.5), преобразуем барометрическую формулу к виду
n=n0e−µgh RT() . Принимая во внимание
полученное выше равенство µ/R=m0/k (см. стр.
62) и учитывая, что m0gh = EП –
потенциальная энергия молекулы газа на
высоте h, получим:
EП −
n= n0 e kT .
Это выражение носит название распределения Больцмана. Оно справедливо не только для гравитационного, но для любого другого потенциального поля.
Распределение Больцмана и состояние статистической системы
Нетрудно заметить,
что распределение Больцмана определяет вероятность нахождения частицы в некоторой
точке пространства. Учитывая, что концентрация
частиц в точке с координатами
x, y, z рассчитывается по
формуле n(x,
y, z)=dN(x, y, z)/dV , где dN(x, y, z)
– число молекул в объеме dV
= dx·dy·dz, вероятность
найти частицу в объеме
dV около этой точки равна ![]() dN x y z(
, , ) =
n0 e−
dN x y z(
, , ) =
n0 e−![]() E
x y zП (kT,
, ) dV
=
f
x y z dxdydz( , , ) ,
E
x y zП (kT,
, ) dV
=
f
x y z dxdydz( , , ) ,
N N где N – полное число молекул в системе. Функция f(x, y, z) является функцией распределения молекул по координатам. Так задается координатная часть состояния молекулярной системы.
Состояние системы будет задано полностью после определения функции распределения молекул по скоростям. Этому вопросу посвящена следующая лекция нашего курса.
Лекция 3. Распределение Максвелла
![]() Пусть имеется сосуд, содержащий N молекул газа при
температуре Т. Ставится задача: найти долю числа
молекул ∆Nυ/N,
или число молекул ∆Nυ, имеющих скорости, за- υ ключенные между значениями υ и
υ + ∆υ. Рис.
35.
Пусть имеется сосуд, содержащий N молекул газа при
температуре Т. Ставится задача: найти долю числа
молекул ∆Nυ/N,
или число молекул ∆Nυ, имеющих скорости, за- υ ключенные между значениями υ и
υ + ∆υ. Рис.
35.
Для упрощения рассуждений вводится понятие пространства скоростей. Координатами точки этого пространства являются компоненты скорости молекул υx,υy,υz. Молекулы, имеющие скорости в пределах от υ до υ + ∆υ, попадают в область, лежащую между сферами радиусов υ и υ + ∆υ (рис. 35). Объем этой области равен 4πυ2∆υ. Число ∆Nυ молекул, попадающих в эту область, равно
∆Nυ = N⋅f(υ)⋅4πυ2∆υ (3.1)
(здесь N⋅f(υ) – плотность точек в пространстве скоростей).
Величина
F(υ) = f(υ)⋅4πυ2 (3.2)
называется функцией распределения молекул по скоростям. Вид этой функции был теоретически получен Максвеллом в 1859 году:
![]()
![]() F(υ) = 4π⋅ m0
2kT
υ2, (3.3)
F(υ) = 4π⋅ m0
2kT
υ2, (3.3)
⋅e
2πkT
где m0 – масса молекулы, Т – абсолютная температура. Учтя (3.2) и (3.3) в (3.1), получим:
m0 ![]()
∆Nυ = 4π⋅N⋅ ![]() ⋅e
2kT
υ2⋅∆υ.
⋅e
2kT
υ2⋅∆υ.
2πkT
Это выражение полностью решает поставленную задачу.
Средняя квадратичная скорость
По аналогии с выражением (1.1), средний квадрат скорости молекулы определяется по формуле
![]() ,
,
и средняя квадратичная скорость, стало быть, равна
![]() υкв = < >υ ∫υF
d(υυ) π
m0 32∞∫ υ4e−m20kTυ2dυ.
υкв = < >υ ∫υF
d(υυ) π
m0 32∞∫ υ4e−m20kTυ2dυ.
Интеграл в этом выражении берется следующим образом. Известно, что
. Обе части равенства можно рассматривать как функции па-
раметра α. Продифференцировав по этому параметру обе части, получим
 .
.
Дифференцирование по α еще раз дает
 .
.
Учитывая далее, что α = m0/(2kT), получим выражение, которое совпадает с записанным ранее и входящим в определение средней кинетической энергии поступательного движения молекулы выражением (2.5).
Средняя арифметическая скорость
Средняя арифметическая скорость вычисляется по выражению (1.1). Перейдя к новой переменной x = υ2 и интегрируя по частям, получим
8kT
![]()
υ=υср = . (3.4)
πm0
Наиболее вероятная скорость
Величина скорости, при которой функция F(υ) максимальна, называется наиболее вероятной скоростью. Обозначим ее через υв. Экстремум функции определим, приравняв нулю производную:
![]()
![]()
![]() ddυυ2 −m20kTυ2 = 1− m2kT0υ2 e−m20kυT2 = 0, откуда
ddυυ2 −m20kTυ2 = 1− m2kT0υ2 e−m20kυT2 = 0, откуда
e
υв = 2kT m0 .
Очевидно, что υкв > υср > υв. Все полученные выше из распределения Максвелла характеристические скорости молекул отличаются друг от друга множителем порядка единицы и могут служить для общего представления о скоростях движения молекул.
Первое начало термодинамики проставляет собой закон сохранения энергии для систем, в которых существенное значение имеют тепловые процессы.
Внутренняя энергия системы
Под внутренней энергией системы понимается сумма энергий всех составляющих ее частей за вычетом кинетической и потенциальной энергии системы как целого (полной механической энергии центра масс). Сюда входят энергии движения и взаимодействия молекул, движения и взаимодействия атомов в молекулах, движения и взаимодействия составных частей атома. Однако при изучении физики (не ядерной!) считается, что атомный и молекулярный состав системы остается неизменным. Системы с изменяющимся молекулярным составом изучает химия, являясь, таким образом, более сложной физикой, а именно – физикой систем с переменным числом частиц.
Самой простой
молекулярной системой является идеальный газ, в
котором взаимодействие между молекулами отсутствует. Найдем его внутреннюю
энергию. Пусть газ состоит
из N молекул. Если средняя энергия одной молекулы равна ε, то полная
внутренняя энергия системы U =εN.
Пусть масса газа m, а молярная масса µ. Тогда количество вещества, т.е.
число молей, равно ν = m/µ. В одном моле содержится NA молекул, значит, N = νNA. С учетом этого полная энергия равна
m
U = νεNA = ![]()
εNA. (4.1)
µ
Согласно
(2.4), средняя энергия поступательного движения одной молекулы равна ε=![]() kT
, однако молекулы могут двигаться не только
прямолинейно, но и вращаться
вокруг одной или нескольких
осей, поэтому это обстоятельство
необходимо учесть при оценке
внутренней энергии молекул. Средняя энергия одной молекулы определяется числом ее степеней
свободы.
kT
, однако молекулы могут двигаться не только
прямолинейно, но и вращаться
вокруг одной или нескольких
осей, поэтому это обстоятельство
необходимо учесть при оценке
внутренней энергии молекул. Средняя энергия одной молекулы определяется числом ее степеней
свободы.
Число степеней свободы молекул
Под числом степеней свободы i понимают количество независимых координат, которые необходимо ввести, чтобы полностью определить положение тела в пространстве.
1. Если точка может двигаться только по прямой, то для определения ее положения нужна лишь одна координата, т.е. i = 1.
2. Положение точки на плоскости определяется двумя координатами, например х и y. Точка на плоскости имеет две степени свободы: i = 2.
3. Положение точки в пространстве определяется тремя координатами, например, х, y и z. Точка в пространстве имеет три степени свободы: i = 3.
4. Двухатомная жесткая молекула. Такая молекула может двигаться поступательно вдоль трех независимых осей, т.е. имеет три поступательных степени свободы. Молекула может вращаться, причем ее вращение можно описывать тремя независимыми углами поворота вокруг трех перпендикулярных осей. Если считать, что атомы молекулы – материальные точки, то вращение вокруг оси, на которой они лежат, не имеет смысла (момент инерции молекулы относительно этой оси равен нулю). Таким образом, молекула имеет только две вращательные степени свободы. Полное число степеней свободы у такой молекулы i = 5.
5. Молекула, состоящая из трех и более атомов с жесткими связями между ними. В этом случае ни один из моментов инерции не может быть равен нулю. Число степеней свободы такой молекулы i = 6 (три поступательных и три вращательных).
6. Если связи в молекуле нежесткие, то к поступательным и вращательным степеням свободы добавляются колебательные. Число колебательных степеней свободы определяется числом независимых колебаний (т.е. не являющихся комбинациями других). Например, для двухатомной молекулы имеется одна колебательная степень свободы – колебания вдоль линии упругой связи.
Основной предпосылкой
молекулярно-кинетической теории газов является предположение о полной
беспорядочности движения молекул при тепловом равновесии. Ни один
из типов движения не имеет
преимущества перед другим. Естественно предположить, что на
каждую степень свободы приходится одинаковая энергия. Легко догадаться, какая энергия приходится на одну
степень свободы. На поступательное
движение приходится три степени
свободы, а энергия поступательного движения ε = 3kT/2, следовательно, энергия, приходящаяся на одну
степень свободы, равна kT/2. Если молекула имеет i степеней свободы, то средняя
энергия такой молекулы равна
ε=
2i
kT . (4.2)
Следует отметить, что на каждую колебательную степень свободы приходится вдвое большая энергия – по kT/2 на кинетическую и потенциальную энергии колебания.
Подставляя (4.2) в (4.1), с учетом (1.4) выражение для внутренней энергии идеального газа можно представить следующим образом:
m i
U = ![]() RT
. (4.3)
µ2
RT
. (4.3)
µ2
Внутренняя энергия идеального газа заданной массы зависит только от его температуры.
Внутренняя энергия является функцией состояния системы, т.е. любому заданному состоянию однозначно соответствует определенная внутренняя энергия. Поэтому при переходе системы из одного состояния в другое изменение внутренней энергии не зависит от вида процесса.
Количество теплоты
![]() Энергию, переданную системе в результате
теплообмена, принято называть количеством теплоты. Количество теплоты не является
функцией состояния системы, а характеризует
протекающий процесс. Например, количество теплоты, переданное системе при ее
переходе из состояния 1 в 2 в
процессе 1a2 будет другим, нежели в процессе
1b2 (рис. 36).
Энергию, переданную системе в результате
теплообмена, принято называть количеством теплоты. Количество теплоты не является
функцией состояния системы, а характеризует
протекающий процесс. Например, количество теплоты, переданное системе при ее
переходе из состояния 1 в 2 в
процессе 1a2 будет другим, нежели в процессе
1b2 (рис. 36).
Работа, совершаемая газом при расширении
Если газ подвергается сжатию или расширению в цилиндре под поршнем, то силы давления, действующие со стороны газа на поршень, совершают работу. Если объем газа изменился на малую величину dV, то газ совершил работу δA=PSdx=PdV, где P – давление газа, S – площадь поршня, dx – его перемещение. При расширении работа, совершаемая газом, положительна, при сжатии – отрицательна. В общем случае при переходе из некоторого начального состояния с объемом V1 в конечное состояние с объемом V2 работа газа выражается формулой:
A![]() PdV . (4.4)
PdV . (4.4)
Работа расширения газа не является характеристикой состояния системы, а зависит от вида проводимого процесса. Найдем работу, совершаемую газом при различных изопроцессах.
Работа при изохорическом процессе
Т.к. V = const, то dV = 0. Следовательно, dA = 0. Поскольку изменения объема нет, то работа при изохорическом процессе равна нулю.
Работа при изобарическом процессе
Т.к. P= const, а dA = PdV, то
A
=![]() PdV
=
P
V(
2
−V1).
PdV
=
P
V(
2
−V1).
Работа при изотермическом процессе
В
интеграле (4.4) для вычисления работы сделаем замену, воспользовавm
RT шись уравнением Клапейрона-Менделеева: P = ![]() . Получим
. Получим
µ V
V2 m RT m V2
![]() A = ∫ dV = RT ln . (4.5) V1 µ
V
µ
V1
A = ∫ dV = RT ln . (4.5) V1 µ
V
µ
V1
Выражение для первого начала термодинамики
Внутреннюю энергию системы можно изменить передачей ей некоторого количества тепла или совершением над ней работы. В свою очередь, теплота, переданная системе, идет на изменение ее внутренней энергии или совершение системой работы против внешних сил:
Q = U2 – U1 +A, или Q = ∆U + A.
В случае бесконечно малых изменений:
δQ = dU + δA. (4.6)
Эти уравнения представляют собой математическое выражение первого начала термодинамики. Использованием символа “δ” вместо “d” специально подчеркнуто, что, в отличие от бесконечно малого приращения внутренней энергии, теплота и работа не могут быть представлены как приращения каких-либо функций состояния.
Первый закон термодинамики является обобщением опытных фактов. Согласно этому закону, энергия не может быть создана или уничтожена; она передается от одной системы к другой и превращается из одной формы в другую.
Важным следствием первого закона термодинамики является утверждение о невозможности создания машины, способной совершать полезную работу без потребления энергии извне. Такая гипотетическая машина получила название вечного двигателя (perpetuum mobile) первого рода.
Теплоемкость
Теплоемкостью тела называют величину, характеризующуюся количеством теплоты, необходимым для изменения его температуры на единицу.
Удельная теплоемкость вещества – величина, равная количеству теплоты, необходимому для нагревания 1 кг вещества на 1 К:
∆Q c = ![]() . m∆T
. m∆T
Единица удельной теплоемкости Дж/(кг⋅К).
Молярная теплоемкость – величина, равная количеству теплоты, необходимому для нагревания 1 моль вещества на 1 К:
∆Q C = ![]() . ν∆T
. ν∆T
Единица молярной теплоемкости Дж/(моль⋅К).
Удельная и молярная теплоемкости связаны соотношением
C = µc, где µ – молярная масса вещества.
Теплоемкости газа. Уравнение Майера
Так как количество тепла, передаваемое системе при переходе из одного состояния в другое, зависит от вида процесса, теплоемкость тела также зависит от вида термодинамического процесса. Для газов различают теплоемкости при постоянном объеме CV и при постоянном давлении CP.
В процессе при постоянном объеме газ работы не совершает: A = 0. Из первого закона термодинамики для 1 моля газа следует, что
QV = CV∆T = ∆U. (4.7)
Для процесса при постоянном давлении первый закон термодинамики дает: QP = ∆U + P(V2 – V1) = CV∆T + P∆V, где ∆V – изменение объема 1 моля идеального газа при изменении его температуры на ∆T. Отсюда следует, что
![]() QP
∆U ∆V ∆V
QP
∆U ∆V ∆V
CP
= = +P =
+C
PV ![]() .
.
∆T ∆T ∆T ∆T
Отношение ∆V/∆T может быть найдено из уравнения состояния идеального газа, записанного для 1 моля: PV = RT. При P = const P∆V = R∆T, т.е. ∆V/∆T =
R/P. Таким образом, для идеального газа CP = CV + R.
Это выражение называется уравнением Майера.
Явное выражение для молярной изохорной теплоемкости можно записать, используя выражение для внутренней энергии (4.3). Для одного моля газа запишем:
∆U i
![]() CV
= = R.
CV
= = R.
∆T 2
Адиабатический процесс
Адиабатическим называется процесс, протекающий без теплообмена с внешней средой, т. е. δQ = 0.
Первое начало термодинамики (4.6) для этого процесса принимает вид: dU+ δA = 0. (4.8)
С учетом определения изохорной теплоемкости и работы расширения газа перепишем (4.8):
CV dT + PdV = 0. (4.9)
Уменьшим число переменных. Исключим из уравнения (4.9) температуру. Для этого возьмем дифференциал от обеих частей уравнения КлапейронаМенделеева:
PdV + VdP = RdT ⇒ dT = (PdV + VdP)/R. (4.10)
Подставим (4.10) в (4.9) и преобразуем:
PdV (R + CV)/CV = –VdP.
Выражение (R + CV)/CV = CP/CV = γ, называется коэффициентом Пуассона. Разделив переменные с учетом определения γ, получим dP/P = –γ dV/V. Интегрируя это уравнение, найдем ln P = −lnVγ + lnC , или PVγ = C.
Полученное выражение есть уравнение адиабатического процесса, которое также носит название уравнения Пуассона.
Второе начало термодинамики позволяет установить направление протекания процессов в природе. Кроме того, при помощи второго начала можно создать рациональную шкалу температур, не зависящую от термометрического вещества и устройства термометра.
Принцип действия тепловой машины
Второе начало термодинамики было сформулировано в результате анализа работы тепловых машин. Тепловой машиной называется периодически действующий двигатель, совершающий работу за счет получаемого извне тепла. Рассмотрим принцип действия тепловой машины.
![]() Тепловые машины делятся на два
класса: машины одноразового действия и циклические
машины. Примером машины одноразового действия может служить пушка. Основные двигатели, которыми мы пользуемся
– паровые двигатели и двигатели
внутреннего сгорания – представляют собой циклические маши
P ны, в которых система периодически совершает работу, и возвращается
в исходное состояние.
Тепловые машины делятся на два
класса: машины одноразового действия и циклические
машины. Примером машины одноразового действия может служить пушка. Основные двигатели, которыми мы пользуемся
– паровые двигатели и двигатели
внутреннего сгорания – представляют собой циклические маши
P ны, в которых система периодически совершает работу, и возвращается
в исходное состояние.
Круговым процессом или циклом называется такой процесс, при котором система, пройдя ряд состояний, возвращается в исходное. На P-V диаграмме (рис. 37) цикл изображается замкнутой кривой. Разобьем цикл на два процесса – расширения и сжатия. В соответствии с определением
V (4.4), работа A1 при расширении определяется
Рис. 37. площадью фигуры под кривой 1а2. Эта работа
положительна, т.к. газ совершает работу. Работа A2 при сжатии определяется площадью под кривой 2b1. Эта работа отрицательна, т.к. над газом совершается работа. Следовательно, работа, совершаемая за цикл, равна площади, охватываемой кривой, описывающей цикл. Чтобы работа за цикл была больше нуля, давление (и, следовательно, температура) в процессе расширения должно быть больше, чем при сжатии. Для этого рабочему веществу во время расширения нужно сообщать тепло Q1, а в ходе сжатия отнимать Q2. Напишем уравнение первого начала для обеих частей цикла: Q1 = U2 – U1 + A1, –Q2 = U1 – U2 + A2.
Складывая эти уравнения, получим A = A1 + A2 = Q1 – Q2.
Коэффициентом полезного действия (КПД) тепловой машины называется отношение
![]() A Q1
−Q2
A Q1
−Q2
η= = .
Q1 Q1
Цикл Карно
![]() Особое место при анализе
работы теп- P
ловых машин занимает цикл Карно.
Это цикл идеальной тепловой машины с максимально
возможным КПД.
Особое место при анализе
работы теп- P
ловых машин занимает цикл Карно.
Это цикл идеальной тепловой машины с максимально
возможным КПД.
Рабочее вещество попеременно приводится в контакт с двумя тепловыми резервуарами – нагревателем с температурой Т1 и холодильником с температурой Т2. Цикл
Карно состоит из двух изотерм и двух адиа- V1 V4 V2 V3 V бат (рис. 38).
Найдем КПД идеальной тепловой ма- Рис. 38.
шины Карно, в которой рабочим телом слуслужит 1 моль идеального газа.
При изотермическом процессе на участке 1-2 внутренняя энергия газа оста-
ется постоянной, поэтому работа А1,2 на этом участке равна количеству теплоты Q1, полученному газом от нагревателя (см. уравнение (4.5)):
V2
А1,2 = Q1 = RT1 ln .
V1
При адиабатическом расширении на участке 2-3 работа совершается за счет внутренней энергии газа, поэтому температура газа понижается. Выражения
(4.8) и (4.7) дают:
А2,3 = –CV (T2 – T1).
На участке 3-4 при изотермическом сжатии теплота Q2, отданная холодильнику, равна работе внешних сил:
V4 А3,4 = –Q2 = RT2 ln .
V3
Работа при адиабатическом сжатии на участке 4-1 равна
А4,1 = –CV (T1 – T2).
Полезная работа, совершаемая газом в результате кругового процесса,
A = А1,2 + А2,3 + А3,4 + А4,1 = Q1 – Q2.
Следовательно, КПД цикла равен
V2 V
RT1ln − RT2 ln 3
![]() Q1
−Q2 V1 V4
Q1
−Q2 V1 V4
η= = . (5.1)
Q1 V2
RT1ln
V1
Состояния 2 и 3 находятся на одной адиабате:
T1V2γ−1 =T2V3γ−1. (5.2)
То же относится к состояниям 4 и 1:
T1V1γ−1 =T2V4γ−1. (5.3)
Разделив (5.2) на (5.3), получим, что V2/V1 = V3/V4. Учитывая это в (5.1), найдем
T1 −T2 η= .
T1
Термодинамическая шкала температур
В 1848 году Томсон (лорд Кельвин) поставил вопрос о необходимости разработки принципа измерения температуры, результаты которого не зависели бы от природы термометрического тела. Исследование этого вопроса привели Томсона к идее измерения абсолютной температуры с использованием идеальной машины Карно, эффективность работы которой не зависит от природы рабочего вещества.
При
осуществлении идеального цикла Карно с каким-либо веществом, измеряется количество теплоты Q1, заимствованной от нагревателя,
и количество теплоты Q2, отданной холодильнику. КПД этого
цикла η = ![]() Q1 −Q2 =
T1 −T2 .
Q1 −Q2 =
T1 −T2 .
Q1 T1
Преобразовав это уравнение, получим
T1 Q1
= ![]() . (5.4)
. (5.4)
T2 Q2
Далее можно предложить такую процедуру.
Некоторое стандартное тело в определенном состоянии (например, вода, кипящая при атмосферном давлении) выбирается в качестве нагревателя. Другое стандартное тело (например, лед, тающий при атмосферном давлении) выбирается в качестве холодильника. Разность их температур Т1 – Т2 (сами температуры пока неизвестны) делятся на произвольное число частей, чем устанавливается значение градуса (скажем на сто частей):
Т1 – Т2 = 100о. (5.5)
В результате имеем два уравнения (5.4) и (5.5), позволяющие определить Т1 и Т2.
Если теперь взять некое вещество при неизвестной температуре Т и использовать его в качестве нагревателя при прежнем холодильнике (температура Т2), то, проведя цикл Карно и измеряя Q'1 и Q'2, можно записать
![]()
![]() Q1′
T Q1′
Q1′
T Q1′
= ⇒ T T= 2 .
Q2′ T2 Q2′
Так находится искомая температура Т.
Машина Карно позволяет лишь принципиально построить температурную шкалу. Для практических измерений температуры она непригодна. На практике всегда измеряется эмпирическая температура с помощью каких-либо реальных термометров. Задача заключается в том, чтобы в показания таких термометров ввести поправки и таким образом привести эти показания к абсолютной термодинамической шкале. В случае термометра, использующего идеальный газ, такие поправки не требуются. Но идеальных газов в природе не существует. Однако разработаны методики нахождения поправок к показаниям термометра, использующего в качестве термометрического тела реальный газ (лучше всего гелий: он может работать до весьма низких температур).
Обратимые и необратимые процессы
Процесс называется обратимым, если система (рабочее тело) непрерывно переходит из одного равновесного состояния в другое. Поэтому обратимые процессы также называются равновесными. Такой идеальный процесс может управляться медленным изменением тех или иных параметров, например температуры или объема. Изменяя параметры в обратном направлении, можно в точности обратить рассматриваемый процесс.
Если систему вывести из равновесного состояния, то через некоторое время она снова перейдет в состояние термодинамического равновесия. Процессы, связанные с переходом системы из неравновесного состояния в равновесное – это необратимые процессы. Они являются неравновесными процессами.
Примерами необратимых процессов являются переход теплоты от нагретого тела к холодному; перемешивание двух различных газов, помещенных в один объем, расширение газов в пустоту. Всякий необратимый процесс характеризуется определенной направленностью, он развивается в каком-то одном направлении и не развивается в обратном. Никогда никто не наблюдал самопроизвольного перехода тепла от холодного тела к горячему; не происходит самопроизвольного разделения газовых компонентов; не было случаев, чтобы газ самопроизвольно сжался. Какое направление развития процесса оказывается дозволенным, а какое запрещенным, – решается с помощью второго начала термодинамики.
Формулировки второго начала термодинамики
Одну из первых формулировок второго начала термодинамики дал Уильям Томсон (лорд Кельвин).
Формулировка Томсона:
Невозможно построить периодически действующую машину, вся деятельность которой сводилась бы к поднятию некоторого груза и соответствующему охлаждению теплового резервуара.
Это означает, что нельзя создать машину, которая совершала бы полезную работу просто за счет уменьшения внутренней энергии какой-нибудь среды. Такую машину Кельвин назвал вечным двигателем второго рода. Если в прежних проектах вечных двигателей нарушался закон сохранения энергии (вечные двигатели первого рода), то здесь такого нарушения нет. Вечный двигатель второго рода не противоречит первому началу термодинамики, его запрещает второй закон.
Немецкий физик Р.Клаузиус сформулировал второе начало термодинамики так:
Переход теплоты от более холодного тела к более нагретому не может совершаться без компенсации.
Если же в результате некоторого процесса совершается переход тепла от тела менее нагретого к телу более нагретому, то такой процесс сопровождается каким-либо компенсирующим процессом. Например, в холодильнике такой переход сопровождается работой электрического двигателя.
Энтропия
Понятие энтропии было введено немецким физиком Р. Клаузиусом в 1865 году. Перепишем выражение (5.4) для КПД цикла Карно в виде
![]() Q1 Q2
Q1 Q2
− = 0 . (5.6)
T1 T2
Отношение Q/T Клаузиус назвал приведенной теплотой. Клаузиус обратил внимание на то, что соотношение (5.6) похоже на закон сохранения. Величина Q1/T1, «отобранная» рабочим телом у нагревателя, равна величине Q2/T2, переданной холодильнику.
Если считать теплоту Q2, отданную системой, отрицательной, то выражение (5.6) примет вид
![]() Q1 Q2 +
=0.
Q1 Q2 +
=0.
T1 T2
Т.е. алгебраическая сумма приведенных теплот в машине, работающей по циклу Карно, равна нулю.
Клаузиус обобщил полученный результат на произвольные обратимые циклы. Для этого он предложил произвольный цикл разбить бесконечно близкими изотермами и адиабатами на элементарные циклы Карно. Для каждого из элементарных циклов справедливо равенство δQ/T = 0. С учетом этого для произвольного обратимого цикла имеем δQ
∫ ![]() = 0. (5.7)
= 0. (5.7)
T
Математически выражение (5.7) аналогично расчету работы консервативных сил вдоль замкнутого контура. Оно означает, что существует функция S, изменение которой определяется только параметрами начала и конца процесса и не зависит от способа перехода системы из одного состояния в другое. Полный дифференциал этой функции равен
δQ
dS = ![]() .
.
T
Функция состояния S является важной характеристикой термодинамических процессов и называется энтропией.
Учитывая, что КПД реальной необратимой машины не может быть больше, чем у идеальной машины Карно, можно показать, что приращение энтропии в цикле, содержащем необратимые процессы, положительно. Это позволяет записать второе начало термодинамики в аналитической форме через энтропию: dS ≥ 0.
Энтропия изолированной системы может только возрастать, если в ней протекает необратимый процесс, либо оставаться постоянной, если процесс обратимый.
Энтропия и вероятность
Изучая термодинамические процессы, Л. Больцман заметил общность в направлении изменения энтропии некоторой системы и в значении термодинамической вероятности состояния.
Всякое макросостояние (состояние системы, характеризующееся ее макроскопическими измеряемыми параметрами) может быть осуществлено различными способами, каждому из которых соответствует некоторое микросостояние (состояние, определяющее параметры микроскопических частей системы). Число различных микросостояний, соответствующих данному макросостоянию, называется статистическим весом или термодинамической вероятностью Р макросостояния. Таким образом, статистический вес Р представляет собой число микроскопических способов, которыми может быть осуществлено данное макросостояние.
Больцман нашел связь между термодинамической вероятностью и изменением энтропии системы: ∆S = klnP .
Энтропия системы пропорциональна логарифму вероятности состояния.
Статистический смысл второго начала термодинамики
В замкнутых системах самопроизвольные процессы протекают в сторону возрастания энтропии. Формула Больцмана позволяет объяснить причину возрастания энтропии: возрастание энтропии означает переход системы из менее вероятных в более вероятные состояния.
При вероятностном рассмотрении энтропия выступает как мера беспорядка в системе. Закон возрастания энтропии в замкнутых системах есть закон увеличения степени беспорядка в этих системах. Иными словами, если систему предоставить самой себе, то наиболее вероятен в ней переход от порядка к беспорядку, к хаосу.
Когда молоток ударяет по наковальне, то упорядоченная составляющая движения молекул, связанная с его поступательным движением как целого, переходит в неупорядоченное тепловое движение молекул наковальни и молота.
Количество энергии в замкнутой системе с течением времени не изменяется. Однако изменяется качество энергии. В частности, уменьшается способность совершить полезную работу. Возрастание энтропии в замкнутой системе есть, по сути дела, постепенное разрушение системы. Всякая замкнутая система со временем разупорядочивается, разрушается. Изоляция системы отдает ее во власть разрушающих случайностей, которые всегда направляют систему к беспорядку. Как выразился французский ученый Л. Бриллюэн, «второе начало говорит о смерти вследствие изоляции».
Границы применимости второго начала термодинамики
Диктуемое вторым началом термодинамики направление развития процессов не является категорическим. Это есть лишь наиболее вероятное направление. Нарушения второго начала в принципе допустимы. Однако мы не наблюдаем их потому, что они маловероятны.
Газ самопроизвольно расширяется в пустоту. Это наиболее вероятное направление процесса. Однако в принципе возможна ситуация, когда скорости молекул газа вдруг окажутся ориентированными так, что газ самопроизвольно сожмется. Такая ситуация маловероятна. Ее исключительно малая вероятность связана с огромным числом молекул в любом макрообъеме газа. Самопроизвольное сжатие газа следует рассматривать как флуктуацию его плотности. Чем больше молекул газа, тем меньше ее относительная вероятность.
Если в явлении участвует небольшое число молекул, нетрудно наблюдать различного рода флуктуации, свидетельствующие о нарушении второго начала.
Например, флуктуации плотности воздуха в объемах, сравнимых с длиной волны видимого света, обуславливают голубой цвет неба.
Броуновская частица, вследствие малости своих размеров, совершает скачки из-за нескомпенсированности ударов молекул с разных сторон. Совершая скачок, частица демонстрирует самопроизвольное превращение тепловой энергии в кинетическую.
Нельзя, по-видимому, экстраполировать второе начало термодинамики на всю Вселенную, т.е. с помощью второго начала термодинамики нельзя анализировать и процессы космических масштабов. В противном случае мы неизбежно придем к выводу, что все на свете в конце концов придет к тепловому равновесию, так называемой «тепловой смерти Вселенной».
Энтропия и информация
Если ввести понятие информации и ее возникновение связать с уменьшением неопределенности, то саму неопределенность, беспорядок можно рассматривать как недостачу информации. Увеличение энтропии соответствует переходу системы из более упорядоченных в менее упорядоченные состояния. Такой переход сопровождается уменьшением информации, содержащейся в структуре системы.
Флуктуации физических параметров обуславливают нарушение второго начала. В этих процессах генерируется информация из шума. Воздействуя определенным образом на систему, можно понизить ее энтропию (за счет повышения энтропии других систем). Это называется процессом управления.
Все это говорит о существовании связи между информацией и энтропией. Впервые на эту связь указал в 1929 году венгерский физик Л. Сциллард.
Итак, если энтропия – мера беспорядка, неопределенности в системе, то информация, напротив, – мера порядка, структуры и определенности. Возрастанию информации соответствует уменьшение энтропии, и, наоборот, уменьшению информации отвечает увеличение энтропии.
Введение
Явления, возникающие в газе при отклонении параметров от равновесных значений, получили название явлений переноса. В этом разделе мы изучим три таких явления – диффузию, вязкость и теплопроводность.
Число столкновений и средняя длина свободного пробега молекул
Скорости молекул при комнатных температурах очень велики. И кажется, что все процессы, связанные, например, с перемешиванием двух газов, пришедших в соприкосновение, должны совершаться очень быстро. Опыт же показывает, что процесс перемешивания совершается относительно медленно. Медленно происходит выравнивание температур, медленно распространяется запах духов. Чем это объяснить?
Молекула, движущаяся в газе, постоянно сталкивается с другими молекулами и изменяет направление своего движения. Поэтому, перемещаясь из одной точки в другую, она проходит очень большой путь. Длины прямолинейных участков пути, которые молекулы проходят без столкновений, различны. Мы можем оценить только среднюю длину свободного пробега молекул λ.
![]()
![]() Будем считать,
что молекулы имеют шарообразную форму. При столкновениях
центры молекул подходят друг другу
на некоторое минимальное расстояние, называемое эффективным диаметром молекулы d. За одну секунду
молекула проходит путь, численно
равный ее средней скорости
Будем считать,
что молекулы имеют шарообразную форму. При столкновениях
центры молекул подходят друг другу
на некоторое минимальное расстояние, называемое эффективным диаметром молекулы d. За одну секунду
молекула проходит путь, численно
равный ее средней скорости υ. Если
среднее число столкновений, испытываемых молекулой за одну
секунду, равно z , то средняя
длина свободного пробега есть λ = υ z
.
![]()
![]()
![]() Найдем z . Будем считать, что только
одна молекула движется, а остальные
находятся в состоянии покоя (рис. 39). Подвижная
молекула при движении столкнется только с теми
частицами, центры которых находятся на расстояниях,
равных или меньших d. Следовательно, за одну
секунду движущаяся молекула «зацепит» только те из
неподвижных, которые лежат внутри цилиндра радиусом d и длиной
Найдем z . Будем считать, что только
одна молекула движется, а остальные
находятся в состоянии покоя (рис. 39). Подвижная
молекула при движении столкнется только с теми
частицами, центры которых находятся на расстояниях,
равных или меньших d. Следовательно, за одну
секунду движущаяся молекула «зацепит» только те из
неподвижных, которые лежат внутри цилиндра радиусом d и длиной υ.
Если V = π⋅d2υ – объем цилиндра, а n – концентрация частиц,
то z = nV = n⋅π⋅d2υ.
Рис. 39. Мы считали, что другие молекулы неподвижны.
Если же учесть их движение, то скорость выбранной
![]()
![]() молекулы относительно остальных молекул возрастет в 2 раз,
и тогда z = 2
nπd2
молекулы относительно остальных молекул возрастет в 2 раз,
и тогда z = 2
nπd2υ.
Стало быть, средняя длина свободного пробега
![]() λ = 1
2 .
(6.1)
λ = 1
2 .
(6.1)
2πd n
Диффузия
Пусть газ, например водород, диффундирует через пористую перегородку толщиной l. Перегородка должна мешать только образованию конвекции. По обе стороны перегородки и в ее каналах находится воздух, который играет роль растворителя. Пусть перед перегородкой поддерживается постоянная концентрация молекул водорода; позади перегородки все прошедшие молекулы тотчас тем или иным путем удаляются, например, выдуваются потоком воздуха. Тогда внутри перегородки установится падение, или градиент концентрации dn/dx.
Опыт показывает, что поток молекул ∆N/∆t через перпендикулярную оси х поверхность S определяется выражением
∆N dn
![]() = –D⋅
= –D⋅ ![]() ⋅S,
⋅S,
∆t dx
где величина D называется коэффициентом диффузии. Знак минус указывает, что поток молекул направлен в сторону убывания концентрации. Умножив обе части равенства на массу молекулы m0, получим выражение для диффундирующей массы за время ∆t:
dρ
∆M = ∆N⋅m0 = – D⋅ ![]() ⋅S⋅∆t.
(6.2)
⋅S⋅∆t.
(6.2)
dx
За ρ = nm0 обозначена плотность диффундирующего газа.
Эта формула представляет собой эмпирическое уравнение диффузии. Его называют также законом Фика.
Хаотическое движение молекул будет стремиться выровнять концентрации, и возникнет поток молекул от мест с большей концентрацией к местам с меньшей. Для вычисления этого потока расположим контрольную площадку S, проходящую через точку x оси Ox перпендикулярно этой оси, и подсчитаем число молекул, проходящих за время ∆t через эту площадку слева направо и справа налево (рис. 40).
![]() Из-за полной
беспорядочности движения результат перемещения частиц будет таков, как если
бы вдоль оси Ox двигалась треть
всех молекул. Стало быть, можно
n
считать, что в положительном
направлении движется 1/6 часть всех частиц.
Тогда количество молекул, проходящих через площадку, равно
Из-за полной
беспорядочности движения результат перемещения частиц будет таков, как если
бы вдоль оси Ox двигалась треть
всех молекул. Стало быть, можно
n
считать, что в положительном
направлении движется 1/6 часть всех частиц.
Тогда количество молекул, проходящих через площадку, равно
N1 = ![]() n1S
n1Sυ∆t.
Здесь n1 – концентрация примеси слева от кон-
трольной площадки. x–λ x x+λ
Поскольку в рассматриваемом случае кон- Рис. 40. центрация изменяется от точки к точке, то сле-
дует определить более тщательно, какому значению координаты соответствует величина n1. Для упрощения расчета примем, что все молекулы, проходящие через контрольную площадку, испытали последнее соударение на одном и том же расстоянии от площадки, равном средней длине свободного пробега λ. Так как выравнивание концентрации происходит лишь в результате взаимных столкновений, то на пути λ концентрация молекул не меняется и остается равной n1 в плоскости х – λ.
Поток молекул, проходящих через площадку справа налево, равен
N![]()
![]() t,
t,
где n2 – концентрация молекул в плоскости х + λ.
Суммарный диффузионный поток через площадку в положительном направлении оси Oх представляет разность двух потоков
∆N = N1 – N![]() – n2). (6.3)
– n2). (6.3)
Разложим функцию n(x) в ряд Тейлора в окрестности точки х и ограничимся двумя первыми членами. Это можно сделать, т.к. λ – малая величина.
![]()
![]() ≈ n(x) – dn
λ, n1 = n(х – λ)
≈ n(x) – dn
λ, n1 = n(х – λ)
dx (6.4)
n2 = n(х +λ) ≈ n(x) + ![]() dn
λ.
dx
dn
λ.
dx
Подставив (6.4) в выражение (6.3), получим ∆N = –![]() 1dn ⋅
1dn ⋅υ⋅∆t⋅λ .
3dx
Помножив правую и левую часть этого уравнения на массу одной молекулы, будем иметь
![]() ∆M = m0∆N =−1
dn m⋅ 0
∆M = m0∆N =−1
dn m⋅ 0υ⋅∆
⋅t λ=−1υ⋅λdρ∆t
. (6.5)
3 dx 3 dx
Сравнение выражений (6.5) и (6.2) показывает, что
D = ![]() . (6.6)
. (6.6)
Подставив сюда выражения для средней скорости молекул (3.4) и средней длины свободного пробега (6.1), можно заключить, что
![]() D ∼ T (
m ⋅n)
. (6.7)
D ∼ T (
m ⋅n)
. (6.7)
![]() Принято приводить значение коэффициента диффузии не при
постоянной концентрации частиц, а при
постоянном давлении. В этом
случае, учитывая уравнение газового состояния P = nkT, получим зависимость D ∼ T
3/2
(
m0
⋅P).
Принято приводить значение коэффициента диффузии не при
постоянной концентрации частиц, а при
постоянном давлении. В этом
случае, учитывая уравнение газового состояния P = nkT, получим зависимость D ∼ T
3/2
(
m0
⋅P).
Вязкость (внутреннее трение)
При течении слоев газа с различными скоростями более быстрый слой ускоряет соседний с ним медленный, а более медленный задерживает более быстрый. Возникающие при этом внутреннего силы трения касательны к слоям газа.
Обозначим скорость течения слоев газа через u (в отличие от скоростей молекул, обозначаемых буквой υ). Рассмотрим две параллельные пластины площадью S, размеры которых много больше расстояния d между ними. Пусть одна из пластин движется с большей скоростью, чем вторая.
На границе между смежными слоями газа действует сила внутреннего трения, величина которой определяется эмпирической формулой du
F = η⋅ ![]() ⋅S.
⋅S.
dz
Здесь η – коэффициент вязкости или коэффициент внутреннего трения; du/dz – градиент скорости в направлении оси z, перпендикулярном к направлению движения частиц; S – площадь поверхности, вдоль которой действует сила F.
Анализ возникновения сил вязкости с точки зрения молекулярнокинетической теории подобен анализу возникновения диффузии. При изучении диффузии мы исследовали перенос массы между слоями, в то время как при изучении вязкости следует рассматривать перенос импульса. Это приводит к следующему значению коэффициента вязкого трения:
η = ![]() ρ
ρυλ.
Сравнение c (6.6) показывает, что диффузия и вязкость связаны соотношением η = ρ⋅D.
Таким образом, коэффициент внутреннего трения η молекулярнокинетическая теория позволяет выразить через величины, характеризующие молекулярную структуру газа: через среднюю длину свободного пробега, среднюю скорость и плотность газа.
![]() Формула (6.7) дает: η ∼ m0T
. Видно, что η не зависит от давления
газа.
Формула (6.7) дает: η ∼ m0T
. Видно, что η не зависит от давления
газа.
Этот результат обусловлен следующими причинами. При понижении давления уменьшается число молекул в единице объема, следовательно, уменьшается и число молекул, переносящих импульс из одного слоя в другой. Но зато возрастает и длина свободного пробега молекул, благодаря чему молекулы попадают из слоя в слой легче. В результате количество движения, переносимого из слоя в слой, остается постоянным.
Теплопроводность
С макроскопической точки зрения явление теплопроводности заключается в переносе некоторого количества тепла Q от более горячего тела к более холодному. Если изменение температуры происходит вдоль оси Oх, то через площадку S, перпендикулярную этой оси, за время ∆t будет перенесено количество тепла тем большее, чем больше градиент температуры: dT
∆Q = –κ⋅ ![]() ⋅S⋅∆t,
(6.9)
⋅S⋅∆t,
(6.9)
dx
где κ – коэффициент теплопроводности, зависящий от сорта газа и от условий, в которых он находится.
С
молекулярно-кинетической теории процесс теплопроводности заключается в том,
что молекулы из более
горячего слоя, где они
имеют большую среднюю энергию ε,
проникая в более холодный слой, передают
молекулам часть своей энергии. И наоборот,
«холодные» молекулы, попадая в более
теплый слой, получают от него
энергию.
Проведя рассуждения для теплопроводности, подобные рассуждениям при выводе коэффициента диффузии (или вязкости), получим следующую формулу для коэффициента теплопроводности:
![]() сV
,
сV
,
где сV – удельная теплоемкость газа.
Зависимость коэффициента теплопроводности κ от параметров, характеризующих состояние газа, имеет
вид: κ ∼ ![]() .
.
Модель идеального газа является приближенной моделью реального газа. Только при высоких температурах и низких давлениях поведение реальных газов подчиняется уравнению Клапейрона-Менделеева. Кроме того, реальные газы могут быть переведены в жидкое и твердое состояние. Если бы газы подчинялись строго уравнению Клапейрона-Менделеева, то такой переход был бы невозможен.
Отличие реального газа от идеального состоит в том, что между молекулами реального газа существуют силы взаимодействия.
Молекулы состоят из заряженных частиц, и заряды противоположных знаков могут не совмещаться в одной точке. Такие молекулы называются полярными. Вследствие этого вокруг атома или молекулы может существовать электрическое поле. Когда молекулы приближаются друг к другу, то они разворачиваются противоположными полюсами и взаимодействуют друг с другом. Такие силы называются дипольно-ориентационными.
Неполярные молекулы могут поляризоваться при взаимном действии друг на друга при сближении. Силы, возникающие при этом, называются дисперсионными. Происхождение этого термина связано с тем, что поляризуемостью молекул определяется показатель преломления газа n (оптическая дисперсия).
Если расстояние между молекулами велико по сравнению с их размерами, то сила взаимодействия между ними является силой притяжения. При малых расстояниях, когда электронные оболочки перекрываются, молекулы отталкиваются.
Уравнение Ван-дер-Ваальса
Самым простым и вместе с тем дающим достаточно хорошие результаты является уравнение Ван-дер-Ваальса.
Уравнение Ван-дер-Ваальса получено путем внесения поправок в уравнение Менделеева – Клапейрона и для 1 моля газа имеет следующий вид:
a
P + ![]() 2
(V
−b)
=
RT
. (7.1)
2
(V
−b)
=
RT
. (7.1)
V
а и b – константы Ван-дер-Ваальса, имеющие для различных газов различные значения, определяемые опытным путем. Константа a учитывает притяжение молекул на больших расстояниях, а b – отталкивание на малых.
Влияние сил отталкивания учтено введением в рассмотрение собственного объема молекул, которые представляются в виде твердых шариков. Из-за взаимного притяжения между молекулами газ сжимается как бы бóльшим давлением, чем давление, оказываемое им на стенки. Заметное взаимодействие молекул происходит на небольших расстояниях, называемых радиусом молекулярного действия. Рассмотрим два маленьких объема, имеющих размеры порядка радиуса молекулярного действия и находящихся на таком же расстоянии друг от друга. Сила взаимного притяжения этих объемов пропорциональна числу молекул N в каждом из них: F ~ N 2. N, в свою очередь, пропорционально числу молекул n в единице объема: N ∼ n. Поэтому F ∼ n2.
Концентрация обратно пропорциональна объему газа, n ~ 1/V, а давление пропорционально силе, P ~ F. Этими простыми соображениями вводится поправка на внутреннее давление: Pвнут = a/V 2.
Вторая поправка b носит название поправки на недоступный объем. Вследствие того, что молекулы обладают собственным объемом, пространство, доступное для их движения, оказывается меньшим, чем объем сосуда.
Допустим, в сосуде находятся две одинаковые молекулы 1 и 2 (рис. 41).
![]() Совершая тепловое движение, они сталкиваются
со стенками. Из-за этого
возникает давление на стенки.
При вычислении давления можно считать, что одна
молекула (например, 2) все время остается неподвижной, а другая
(1) движется с удвоенной кинетической энергией. Давление не зависит
от того, как энергия
распределена между молекулами. Центры молекул не могут
сблизиться на расстояние меньшее, чем их
диаметр d. Рис.
41. Окружим молекулу 2 сферой радиуса d. Очевидно, что центр
Совершая тепловое движение, они сталкиваются
со стенками. Из-за этого
возникает давление на стенки.
При вычислении давления можно считать, что одна
молекула (например, 2) все время остается неподвижной, а другая
(1) движется с удвоенной кинетической энергией. Давление не зависит
от того, как энергия
распределена между молекулами. Центры молекул не могут
сблизиться на расстояние меньшее, чем их
диаметр d. Рис.
41. Окружим молекулу 2 сферой радиуса d. Очевидно, что центр
движущейся молекулы не может проникнуть внутрь этой сферы. Значит, объем, доступный молекуле 1, из-за присутствия молекулы 2 уменьшается на объем сферы, т.е. на величину 43πd 3 .
Пусть теперь
в сосуде находится NА
молекул. Половина из них
покоится и окружена сферами радиуса d, а молекулы другой половины движутся с удвоенной
кинетической энергией. Тогда объем, доступный центрам движущихся молекул, будет меньше на b = ![]() πd
3 NA/2 = 4NA 34π(d
/2)3 ,
т.е. на учетверенный
собственный объем всех молекул.
πd
3 NA/2 = 4NA 34π(d
/2)3 ,
т.е. на учетверенный
собственный объем всех молекул.
Запишем уравнение Ван-дер-Ваальса для произвольного числа молей ν. Если газ занимает объем V, то молярный объем будет V/ν. Подставим его в уравнение (7.1). Получим
aν2 V aν2
![]() P+
2 − =b RT
, или P+
P+
2 − =b RT
, или P+
![]() 2
(V
−ν νb)=
RT
.
2
(V
−ν νb)=
RT
.
V ν V
Внутренняя энергия реального газа
Внутренняя энергия реального газа состоит из кинетической энергии теплового движения и потенциальной энергии взаимодействия между молекулами.
При расширении газа работа δА против сил взаимодействия между молекулами пойдет на увеличение внутренней потенциальной энергии. Для 1 моля
δА
= dEП = Pвнутр⋅dV
= ![]() a2
dV. V
a2
dV. V
Проинтегрируем
это выражение: EП
= – ![]() a2 + const.
a2 + const.
V
При устремлении объема газа к бесконечности потенциальная энергия станет равной нулю, поэтому const = 0, и a
EП
= – ![]() 2 .
2 .
V
Внутренняя энергия U одного моля газа состоит из кинетической и потенциальной. При устремлении объема газа к бесконечности выражение для внутренней энергии реального газа должно переходить в выражение для внутренней энергии идеального газа, следовательно a
U = CVT – ![]() 2
.
2
.
V
Эффект Джоуля – Томсона
Эффект Джоуля-Томсона заключается в изменении температуры газа при адиабатическом дросселировании, т.е. при прохождении через дроссель – местное гидродинамическое сопротивление (сужение трубопровода, вентиль, кран, пробка и т.д.).
При дросселировании газ не совершает работы и нет теплообмена с внешней средой. При прохождении через дроссель понижается только давление газа. Внутренняя энергия идеального газа не зависит от давления, поэтому его температура при дросселировании не изменяется.
Другие вещества могут нагреваться или охлаждаться. Если разность температур ∆Т < 0, то эффект считается положительным, и отрицательным при ∆Т > 0.
Газ, для которого можно пренебречь поправкой а, но для которого поправка b играет существенную роль, нагревается при расширении сквозь пробку.
Дросселирование газа, для которого можно пренебречь поправкой b в уравнении Ван-дер-Ваальса, но для которого поправка a играет существенную роль, приводит к его охлаждению.
Изотермы Ван-дер-Ваальса
Изотермы идеального газа имеют вид гипербол, асимптотами которых являются оси координат. При Т = const каждому значению P соответствует определенное значение V.
Иначе обстоит дело с изотермами, описываемыми уравнением Ван-дерВаальса. Это уравнение третьей степени относительно V, в чем легко убедиться, если раскрыть скобки и освободиться от V в знаменателе:
3 RT 2 a ab
![]() V
−b +
V
−b + ![]() V + V − = 0.
V + V − = 0.
P P P
![]() Построим несколько графиков зависимости P =
f
V(
) при различных Т = const (рис. 42). Как
видно из рисунка, при высоких
температурах изотермы Вандер-Ваальса мало отличаются
от изотерм идеального газа. Но
с понижением температуры зависимость давления от объема
все более уклоняется от гиперболы.
При достаточно низких температурах в средней
части графика образуется «завиток» с минимумом
и максимумом. При некоторой
промежуточной температуре координаты максимума и минимума
становятся равными. Такая температура и соответствующая
ей изотерма называется критической. Критическая изотерма монотонно опускается вниз за
исключением одной точки К, являющейся
точкой перегиба изотермы. В ней
касательная к изотерме горизонтальна. Точка К называется
критической точкой. Соответствующие ей давление
PK, объем
VK и
температура ТK называются критическими.
Построим несколько графиков зависимости P =
f
V(
) при различных Т = const (рис. 42). Как
видно из рисунка, при высоких
температурах изотермы Вандер-Ваальса мало отличаются
от изотерм идеального газа. Но
с понижением температуры зависимость давления от объема
все более уклоняется от гиперболы.
При достаточно низких температурах в средней
части графика образуется «завиток» с минимумом
и максимумом. При некоторой
промежуточной температуре координаты максимума и минимума
становятся равными. Такая температура и соответствующая
ей изотерма называется критической. Критическая изотерма монотонно опускается вниз за
исключением одной точки К, являющейся
точкой перегиба изотермы. В ней
касательная к изотерме горизонтальна. Точка К называется
критической точкой. Соответствующие ей давление
PK, объем
VK и
температура ТK называются критическими.
Записав уравнение Ван-дер-Ваальса в критической точке, можно найти, что
VK = 3b;
a a
![]() PK = 2 = 2 ;
PK = 2 = 2 ;
![]() 3VK
27b (3VK
−b P)
K
8ab 8a
3VK
27b (3VK
−b P)
K
8ab 8a
TK = = 2 = .
R 27b R 27bR
При высоких температурах экспериментальные изотермы реальных газов похожи на изотермы идеального газа. При более низких температурах характер изотерм меняется. Схематически изотерма, относящаяся к такой более низкой температуре, представ- Рис лена на рис. 43.
При больших объемах сжатие приводит к возрастанию давления; этой части изотермы соответствует ветвь ON. Здесь свойства реального газа аналогичны свойствам идеального газа.
При достижении давления P0, которому соответствует объем V′ , поведение резко меняется: при дальнейшем сжатии давление P0 остается постоянным, начинается процесс ожижения. Чем выше степень сжатия, тем большее количество газа (который при этих условиях называется насыщенным па-
![]() V ром)
переходит в жидкость. Точка М соответствует
полному переходу всего количества газа в
жидкое состояние.
V ром)
переходит в жидкость. Точка М соответствует
полному переходу всего количества газа в
жидкое состояние.
Дальнейшее продвижение поршня потребует больших усилий, т.к. жидкость мало сжимаема.
Давление P0, при котором происходит ожижение, носит название упругости насыщенных паров при данной температуре Т. В области между точками М и N вещество находится в двух агрегатных состояниях или, как говорят, в двух фазах – жидкой и газообразной.
Сравнение экспериментальных изотерм с теоретическими изотермами Вандер-Ваальса показывает, что область максимумов и минимумов относится к переходу вещества из газообразного состояния в жидкое.
Выше критической температуры TK вещество может существовать только в газообразном состоянии. Газ, температура которого выше TK, никаким сжатием не может быть переведен в жидкое состояние. В критической точке пропадает всякое различие между жидкостью и паром.
Рассмотрим более подробно различие между экспериментальными изотермами и изотермами Ван-дер-Ваальса (рис. 44). На экспериментальной изотерме области максимумов и минимумов соответствует прямая MN. Однако оказывается, что некоторые точек, попадающие в эту область, могут быть получены экспериментально.
![]() Так, в обеспыленном
и свободном от электрических
зарядов пространстве можно получить пары при
давлении P большем, чем давление
насыщенных паров P0 при данной
температуре. Такие пары называются
пересыщенными. Состояние пересыщенных паров изображается частью изотермы Na.
Так, в обеспыленном
и свободном от электрических
зарядов пространстве можно получить пары при
давлении P большем, чем давление
насыщенных паров P0 при данной
температуре. Такие пары называются
пересыщенными. Состояние пересыщенных паров изображается частью изотермы Na.
Вещество в жидком состоянии может находиться под давлением, которое будет меньше упругости насыщенных паров при данной температуре. Этому состоянию соответствует часть изотермы Mb. Вещество на участке Mb находится в состоянии, называемом перегретой жидкостью.
Вовсе не могут быть осуществлены состояния на участке ab. Эти участки соответствуют совершенно неустойчивому состоянию вещества.
Таким образом, мы видим, что уравнение Ван-дер-Ваальса при всей его простоте дает верную картину поведения вещества в широком интервале температур и давлений и даже при превращении его из жидкого состояния в газообразное и обратно.
Предисловие 3
Предмет физики 3
Рекомендуемая литература 3
ОСНОВЫ КЛАССИЧЕСКОЙ МЕХАНИКИ 4
Лекция 1. Кинематика 4
Основные понятия 4
Скорость 5
Ускорение 6
Ускорение при криволинейном движении 6
Движение материальной точки по окружности 8
Лекция 2. Динамика 8
Законы Ньютона 8
Первый закон Ньютона 8
Масса и импульс тела 9
Второй закон Ньютона 9
Третий закон Ньютона 10
Принцип относительности Галилея 10
Понятие состояния в классической механике 11
Лекция 3. Силы 12
Закон всемирного тяготения 13
История открытия закона всемирного тяготения 13
Силы упругости. Закон Гука 15
Деформация сдвига 16
Силы трения 16
Трение качения 17
Внутреннее трение или вязкость 17
Лекция 4. Закон сохранения энергии 17
Работа. Мощность 18
Работа переменной силы 18
Единицы работы 19
Мощность 19
Кинетическая энергия 20
Потенциальная энергия 20
Закон сохранения энергии 22
Лекция 5. Закон сохранения импульса 22
Абсолютно неупругий удар 23
Абсолютно упругий удар 24
Реактивное движение 24
Лекция 6. Механика твердого тела 25
Момент силы и момент инерции 26
Моменты инерции некоторых тел 27
Момент инерции тонкостенного полого цилиндра 28
Mомент инерции однородного диска 28
Кинетическая энергия вращающегося твердого тела 28
Теорема Штейнера 29
Закон сохранения момента импульса 29
Гироскопы 30
Лекция 7. Неинерциальные системы отсчета 31
Силы инерции и принцип Даламбера 31
Равномерно вращающаяся система отсчета. Центробежная сила 32
Движение во вращающейся системе отсчета. Сила Кориолиса 32
Лекция 8. Колебания 33
Гармонические колебания 34
Динамика гармонического колебания 35
Маятники 35
Математический маятник 35
Физический маятник 36
Затухающие колебания 36
Вынужденные колебания. Резонанс 38
Автоколебания 39
Лекция 9. Элементы механики жидкостей и газов 39
Давление 39
Закон Паскаля 39
Гидростатическое давление 40
Закон Архимеда 40
Уравнение неразрывности 40
Уравнение Бернулли 41
Вязкость жидкостей 42
Движение вязкой жидкости 42
Движение тел в жидкостях и газах 43
Методы определения вязкости жидкости 43
Метод Стокса 43
Метод Пуазейля 44
Лекция 10. Элементы специальной теории относительности 45
Постулаты Эйнштейна 46
Относительность времени 46
Преобразования Лоренца 46
Релятивистская кинематика 48
Релятивистское сокращение длины. Относительность длины 48
Релятивистское замедление времени 49
Парадокс близнецов 49
Релятивистский закон преобразования скоростей 50
Элементы релятивистской динамики 50
Релятивистская кинетическая энергия 51
Связь между энергией и массой. Энергия покоя 51
Соотношение между энергией и импульсом 52
ОСНОВЫ МОЛЕКУЛЯРНОЙ ФИЗИКИ И ТЕРМОДИНАМИКИ 53
Введение 53
Лекция 1. Основные определения и понятия 53
Особенности описание состояния молекулярной системы 53
Молекулярно-кинетический или статистический подход 54
Термодинамический метод 55
Температура, давление, объем 55
Термодинамическое равновесие. Термодинамический процесс 57
Газовые законы 57
Закон Бойля – Мариотта 57
Законы Гей-Люссака 58
Закон Авогадро 58
Закон Дальтона 58
Уравнение Клапейрона-Менделеева 58
Лекция 2. Основное уравнение молекулярно-кинетической теории 59
Идеальный газ 59
Основное уравнение молекулярно-кинетической теории 60
Физический смысл давления и температуры 61
Средняя квадратичная скорость 61
Распределение Больцмана 62
Распределение Больцмана и состояние статистической системы 63
Лекция 3. Распределение Максвелла 63
Средняя квадратичная скорость 64
Средняя арифметическая скорость 65
Наиболее вероятная скорость 65
Лекция 4. Первое начало термодинамики 65
Внутренняя энергия системы 65
Число степеней свободы молекул 66
Количество теплоты 67
Работа, совершаемая газом при расширении 67
Работа при изохорическом процессе 68
Работа при изобарическом процессе 68
Работа при изотермическом процессе 68
Выражение для первого начала термодинамики 68
Теплоемкость 69
Теплоемкости газа. Уравнение Майера 69
Адиабатический процесс 70
Лекция 5. Второе начало термодинамики 70
Принцип действия тепловой машины 70
Цикл Карно 71
Термодинамическая шкала температур 72
Обратимые и необратимые процессы 73
Формулировки второго начала термодинамики 74
Энтропия 74
Энтропия и вероятность 75
Статистический смысл второго начала термодинамики 76
Границы применимости второго начала термодинамики 76
Энтропия и информация 77
Лекция 6. Явления переноса 77
Введение 77
Число столкновений и средняя длина свободного пробега молекул 77
Диффузия 78
Вязкость (внутреннее трение) 80
Теплопроводность 81
Лекция 7. Реальные газы 82
Уравнение Ван-дер-Ваальса 82
Внутренняя энергия реального газа 83
Эффект Джоуля – Томсона 84
Изотермы Ван-дер-Ваальса 84
Бахтин Николай Александрович
Осинцев Алексей Михайлович
Попов Александр Валерьевич
ФИЗИКА
Конспект лекций
Основы классической механики
Основы молекулярной физики и термодинамики
Художественный редактор Л.П. Токарева
Подписано в печать 16.12.03 Формат 60×84/16.
Отпечатано на ризографе. Тираж 1000 экз. Объем 6 п.л.
Зак. № 212. Цена 24 р.
Кемеровский технологический институт пищевой промышленности.
650056, г. Кемерово, б-р Строителей, 47.
Отпечатано в лаборатории множительной техники КемТИППа,
650010, г. Кемерово, ул. Красноармейская, 52
[1] = – ω0 x. (8.1) dt
Уравнение (8.1) является дифференциальным уравнением гармонического колебания, выражающим общее свойство синусоидальной функции.
Если вторая производная какой-либо функции по времени пропорциональна с обратным знаком этой функции, то эта функция изменяется по гармоническому закону, причем коэффициент пропорциональности равен квадрату круговой частоты гармонического колебания.
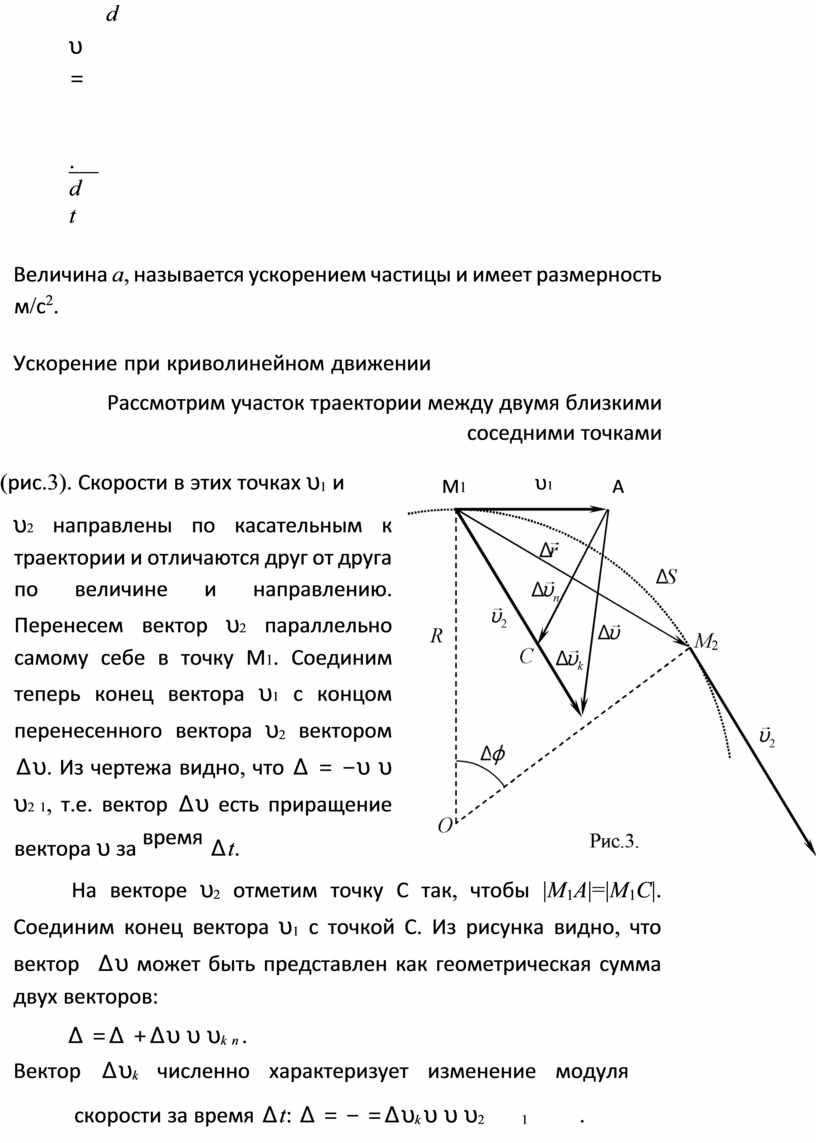
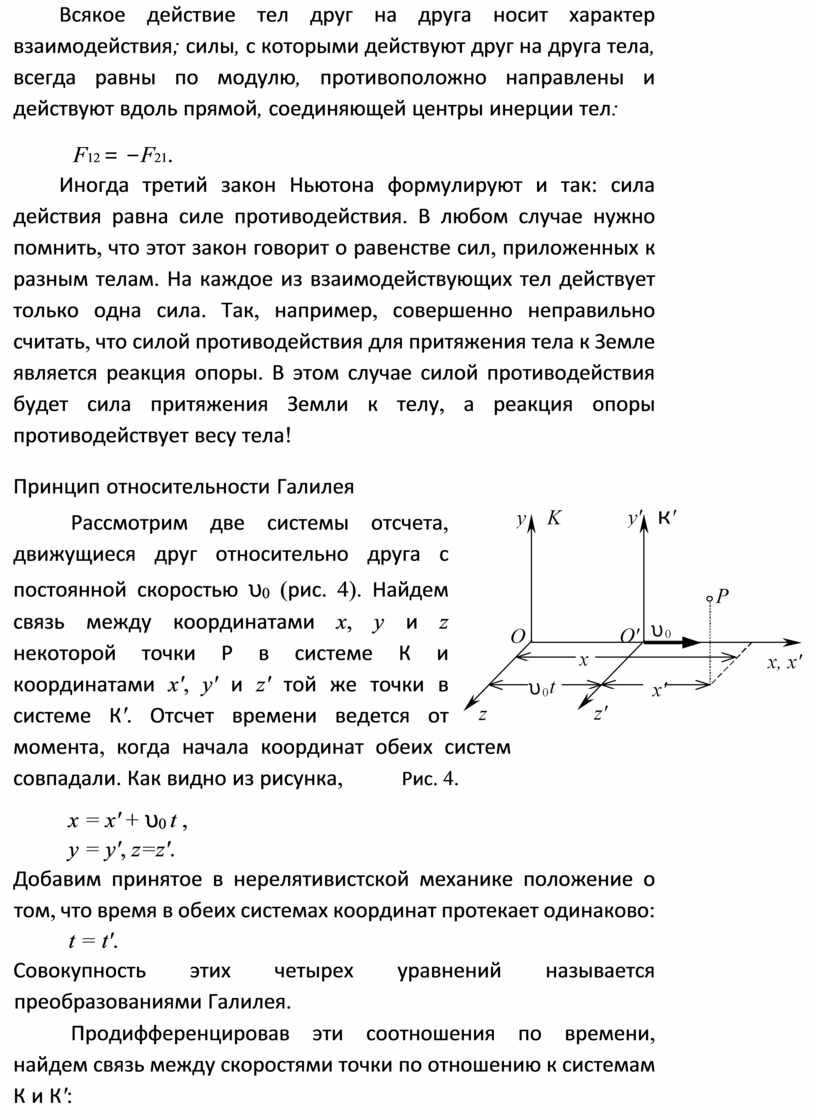
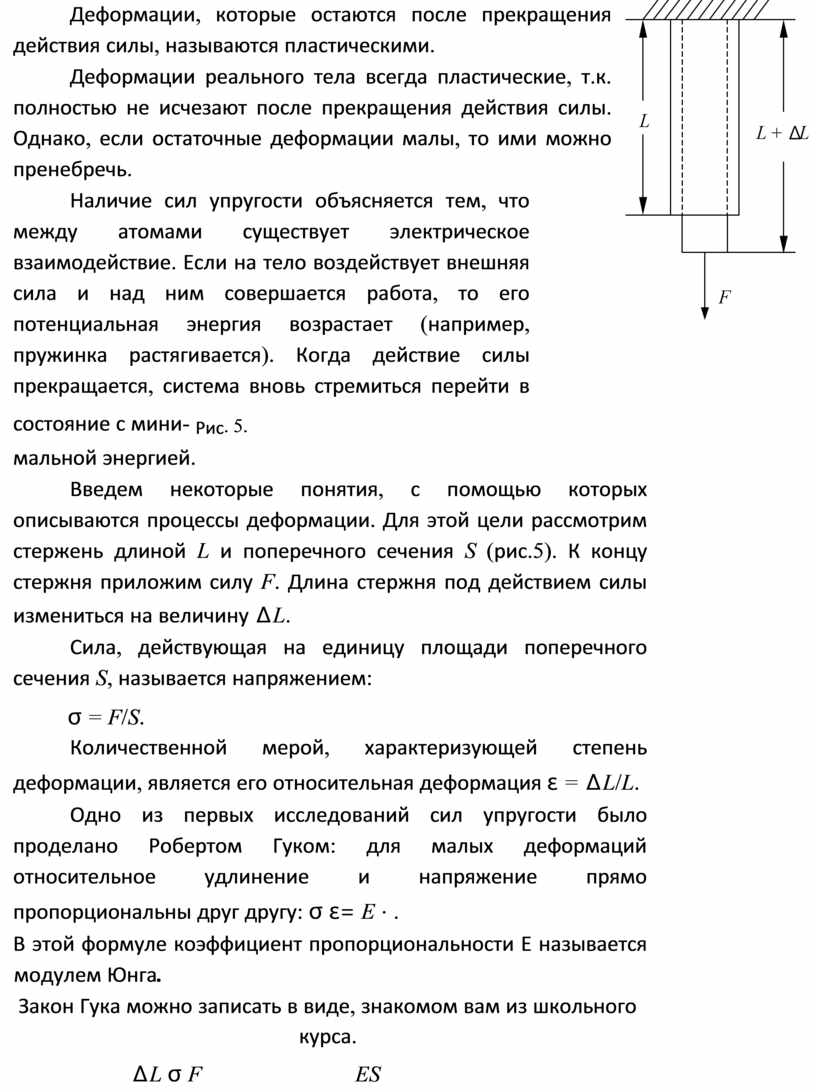
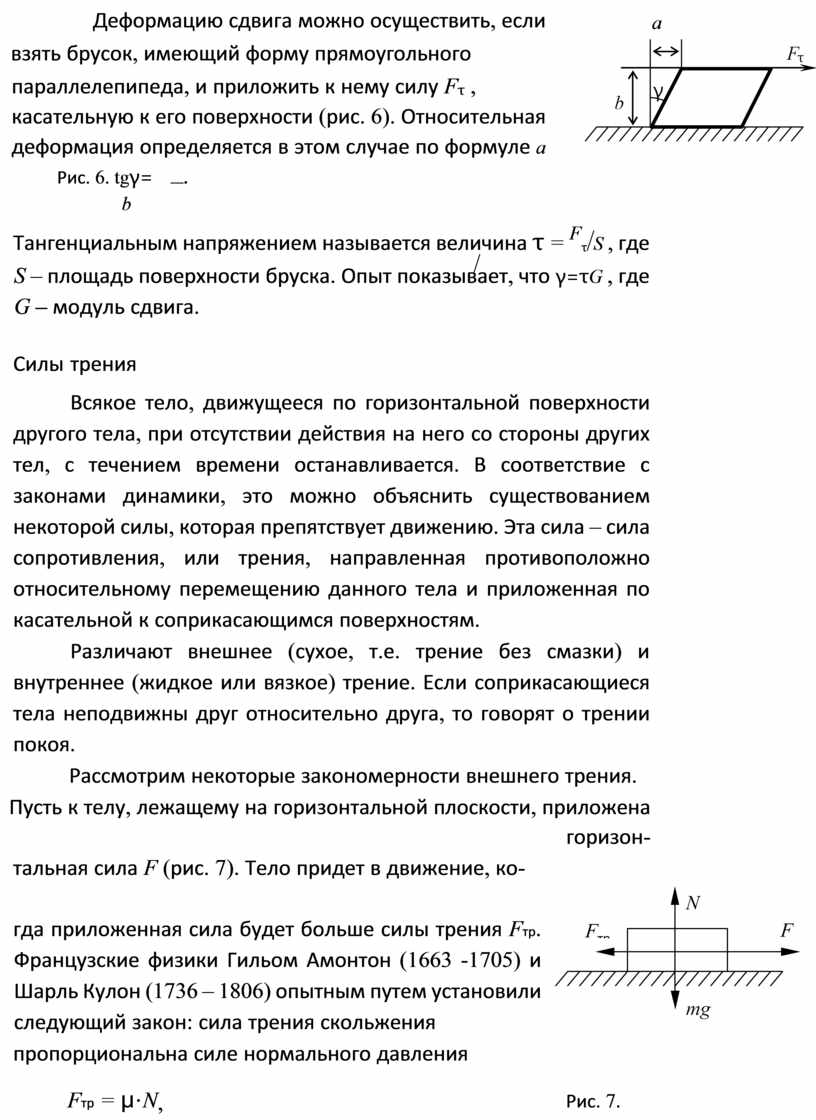
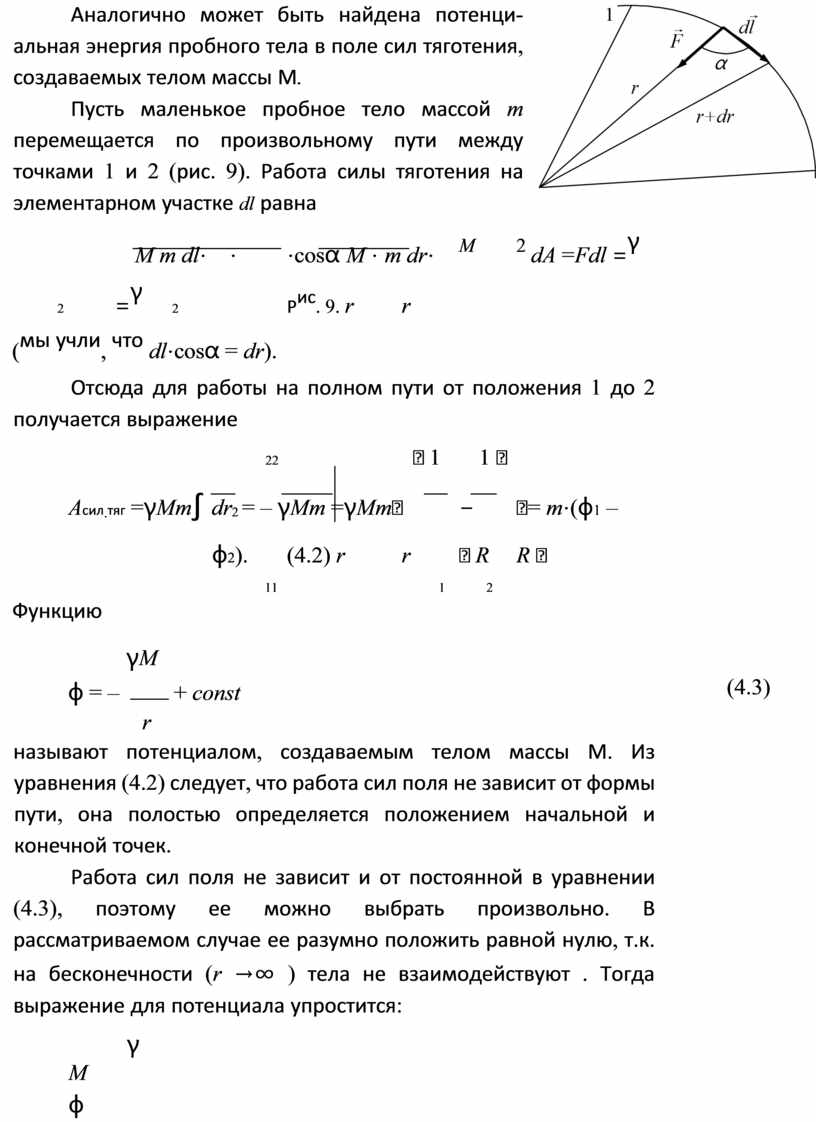
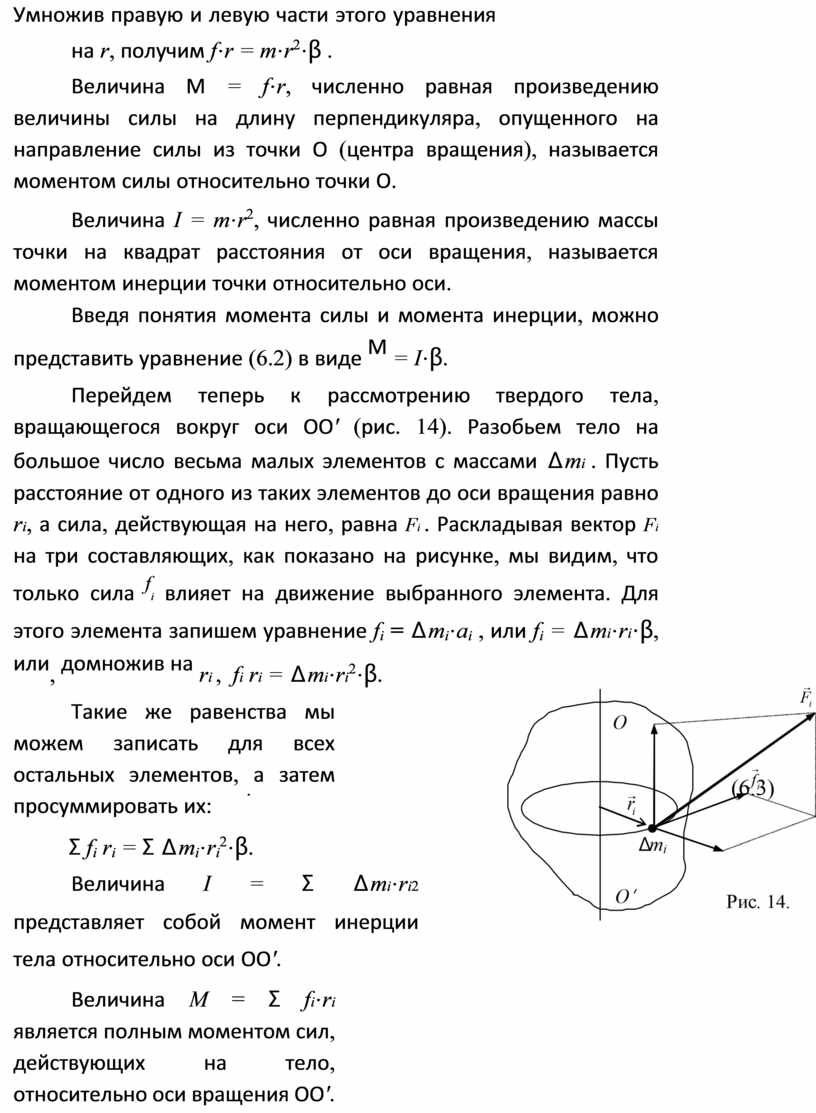
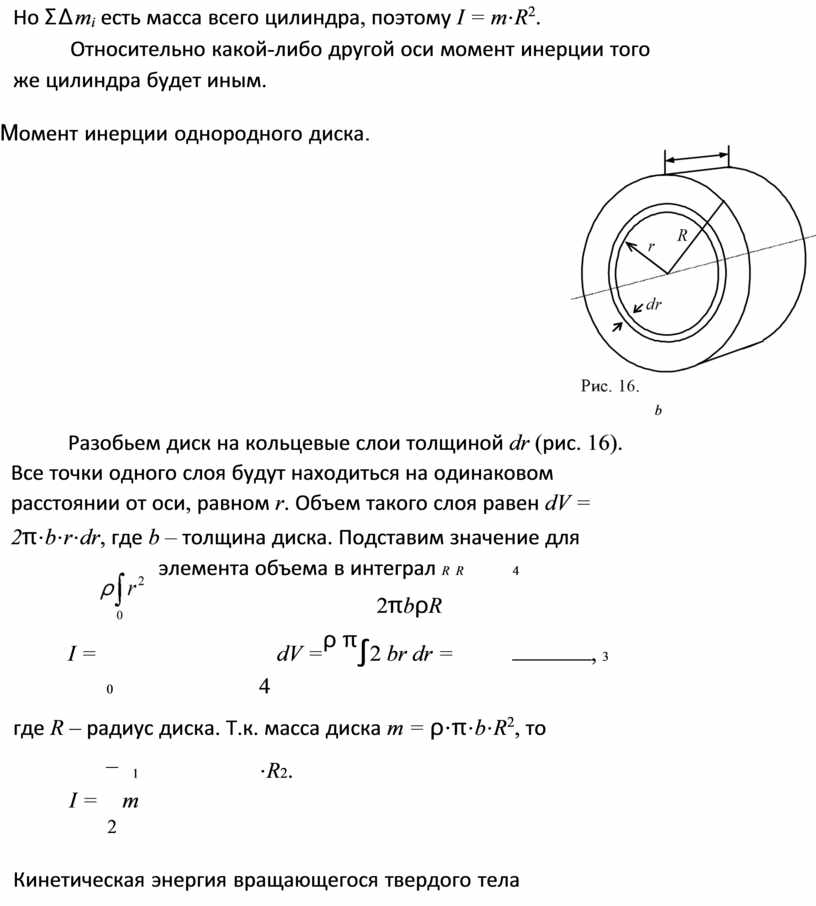
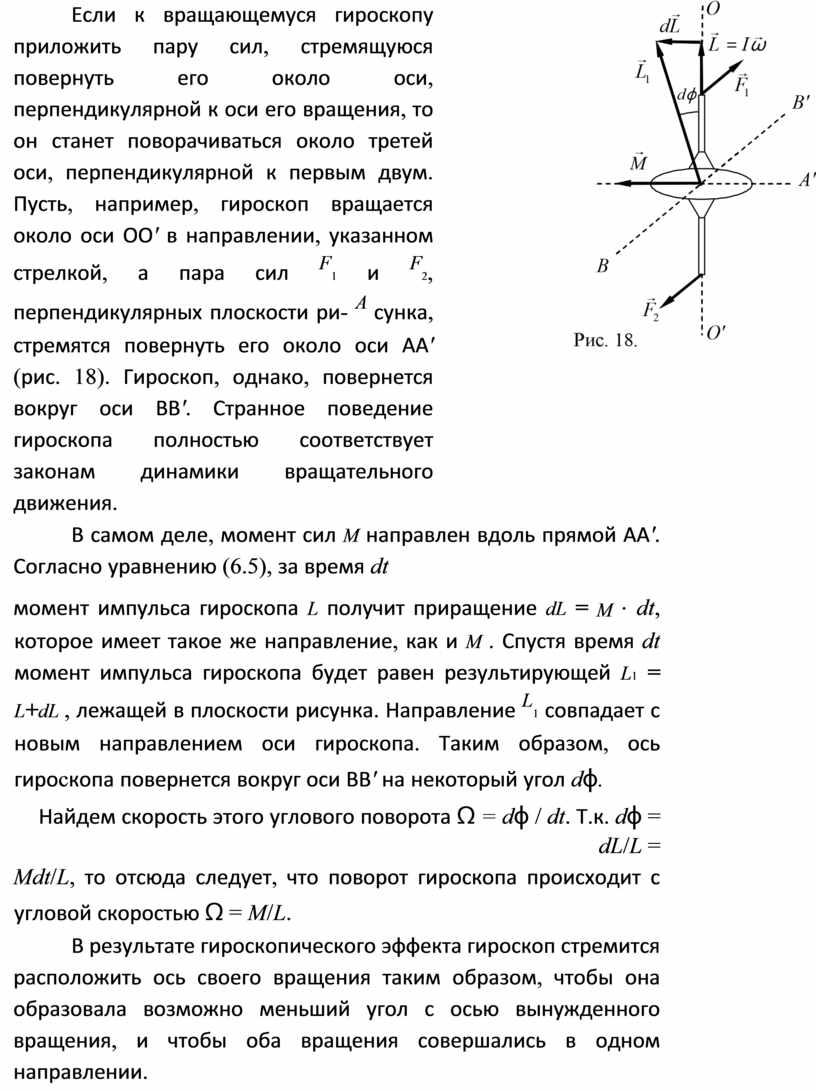
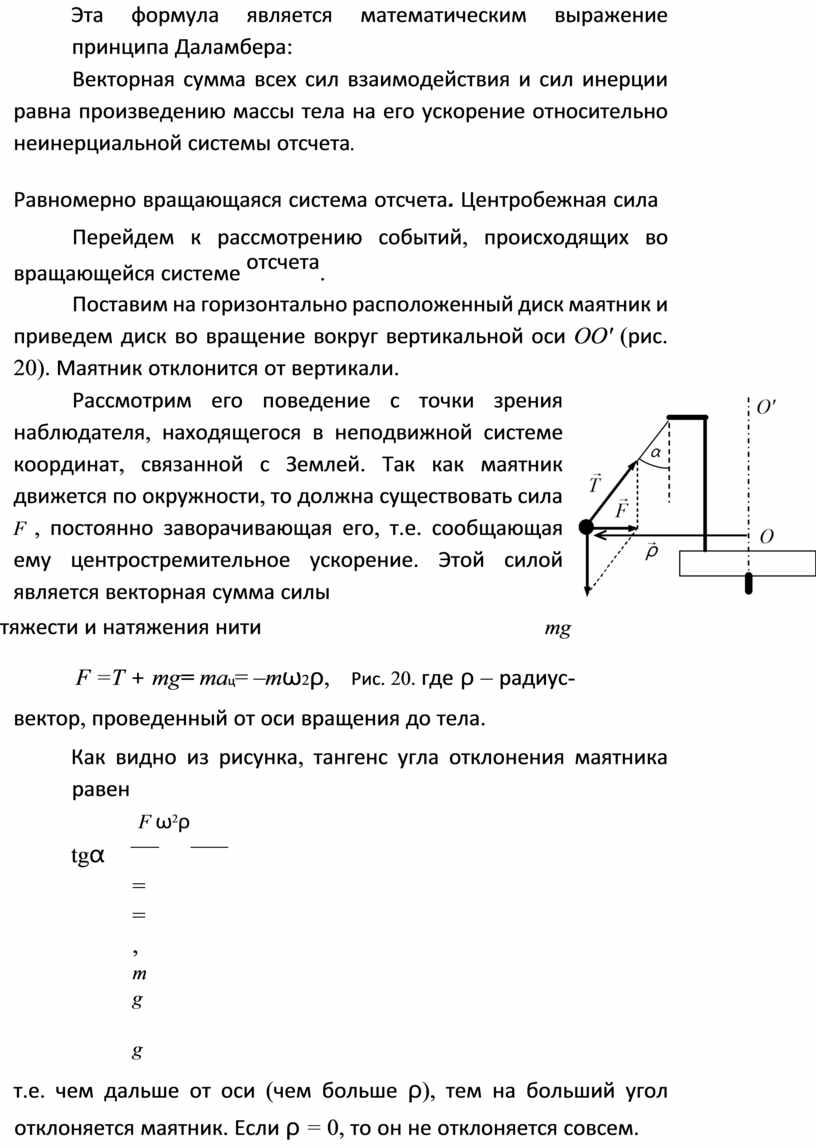
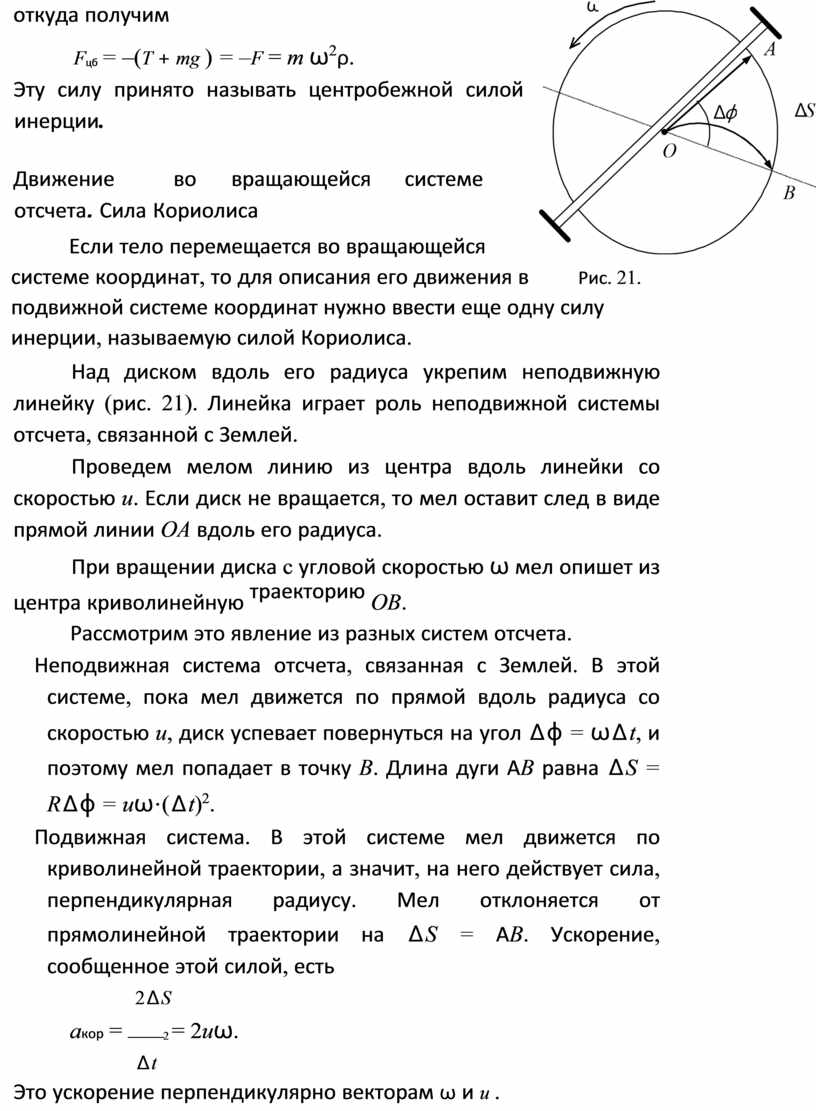
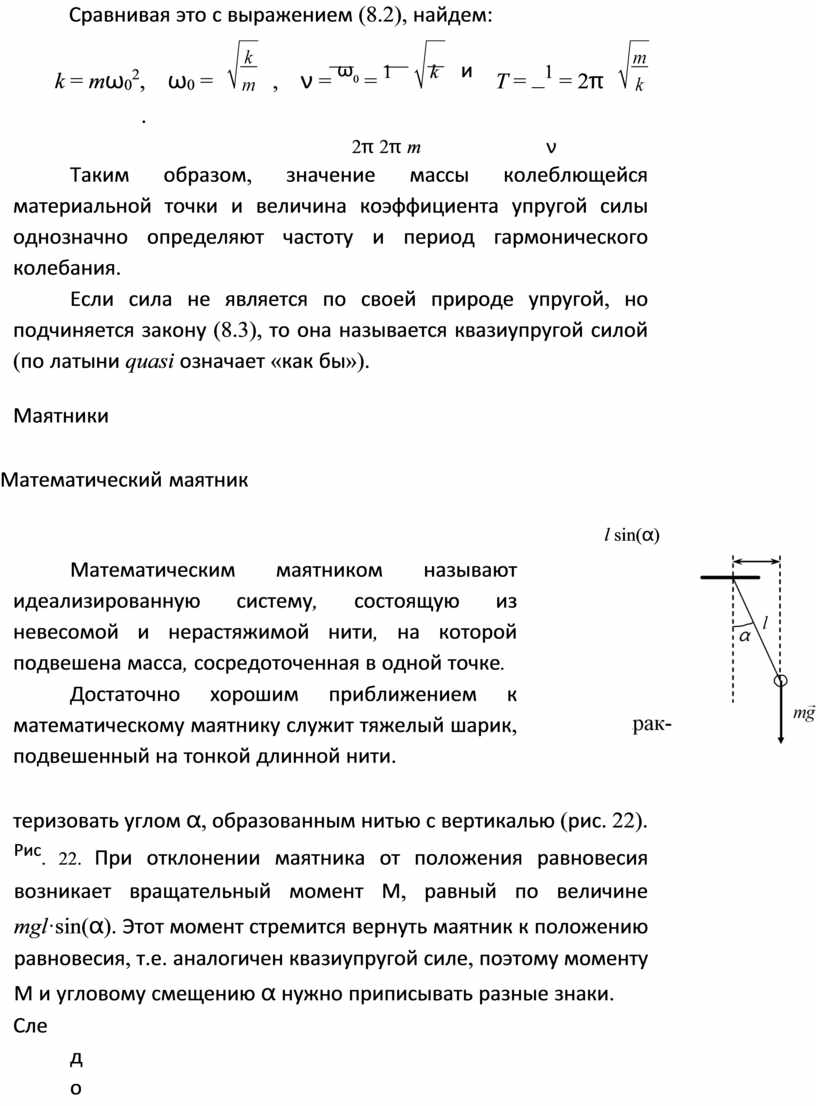
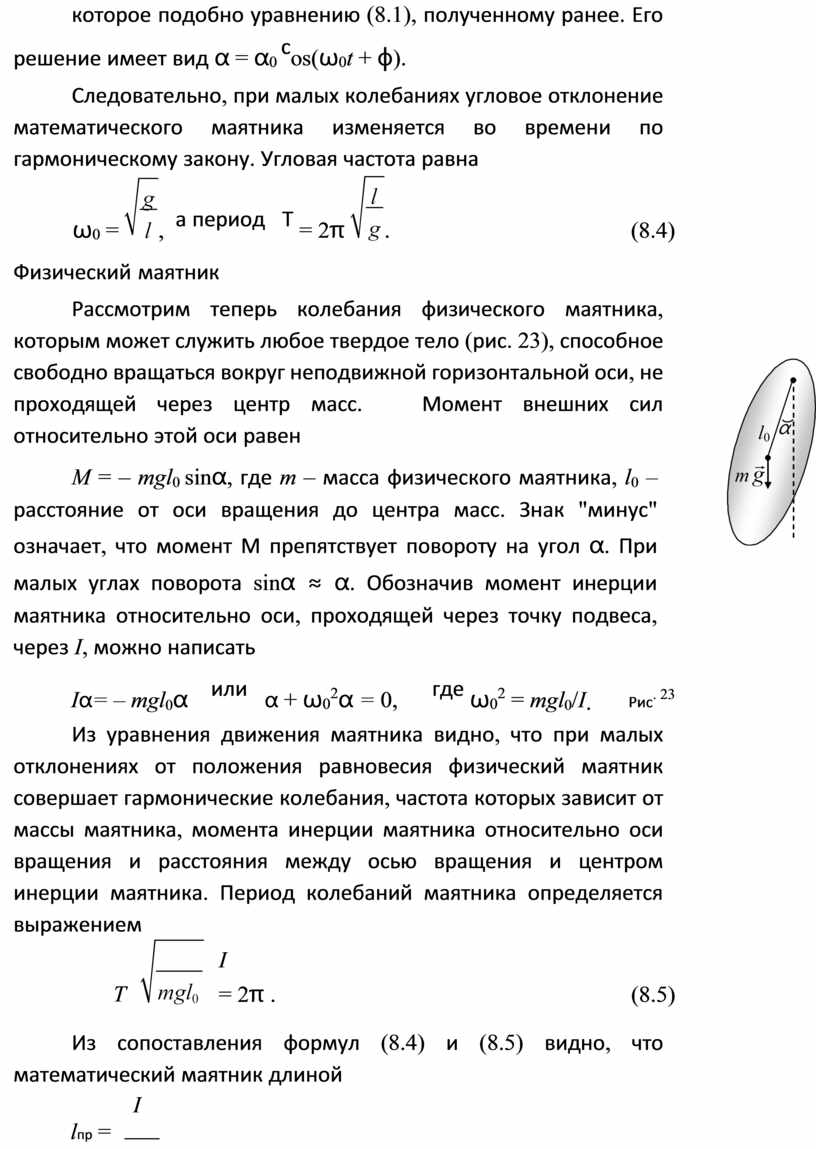
Материалы на данной страницы взяты из открытых источников либо размещены пользователем в соответствии с договором-офертой сайта. Вы можете сообщить о нарушении.